

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (12): 2920-2926.DOI: 10.3969/j.issn.1004-132X.2025.12.014
Previous Articles Next Articles
ZHANG Lei( ), YANG Congnan, LI Weiyi, ZHAO Yijie, WANG Xiaocong
), YANG Congnan, LI Weiyi, ZHAO Yijie, WANG Xiaocong
Received:2024-11-24
Online:2025-12-25
Published:2025-12-31
Contact:
ZHANG Lei
张雷(), 杨聪楠, 李崴一, 赵一洁, 王晓聪
通讯作者:
张雷
作者简介:张雷*(通信作者),男,1987年生,博士、副教授。研究方向为无人平台建模与控制。E-mail:cvx1987@163.com。
基金资助:CLC Number:
ZHANG Lei, YANG Congnan, LI Weiyi, ZHAO Yijie, WANG Xiaocong. Design of Adaptive Self-balancing Control Algorithm for Variable Height Dual-wheel-legged Platforms[J]. China Mechanical Engineering, 2025, 36(12): 2920-2926.
张雷, 杨聪楠, 李崴一, 赵一洁, 王晓聪. 变高度双轮足平台自适应平衡控制算法设计[J]. 中国机械工程, 2025, 36(12): 2920-2926.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.12.014
Fig.1 The schematic diagram of the coordinate system for the dual-wheel-legged unmanned platform
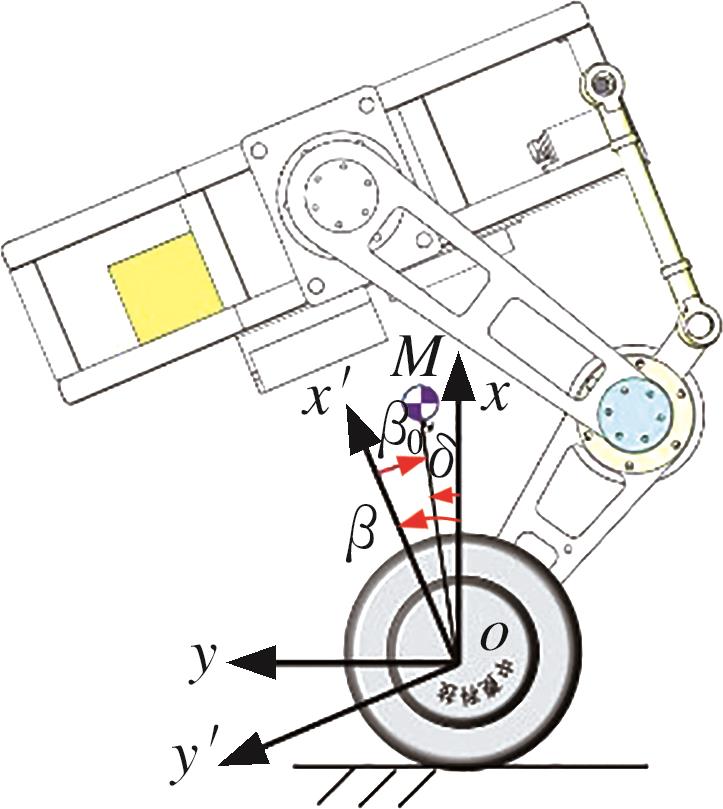
Fig.2 The simplified model of the dual-wheel-legged unmanned platform and the centroid offset angle illustration
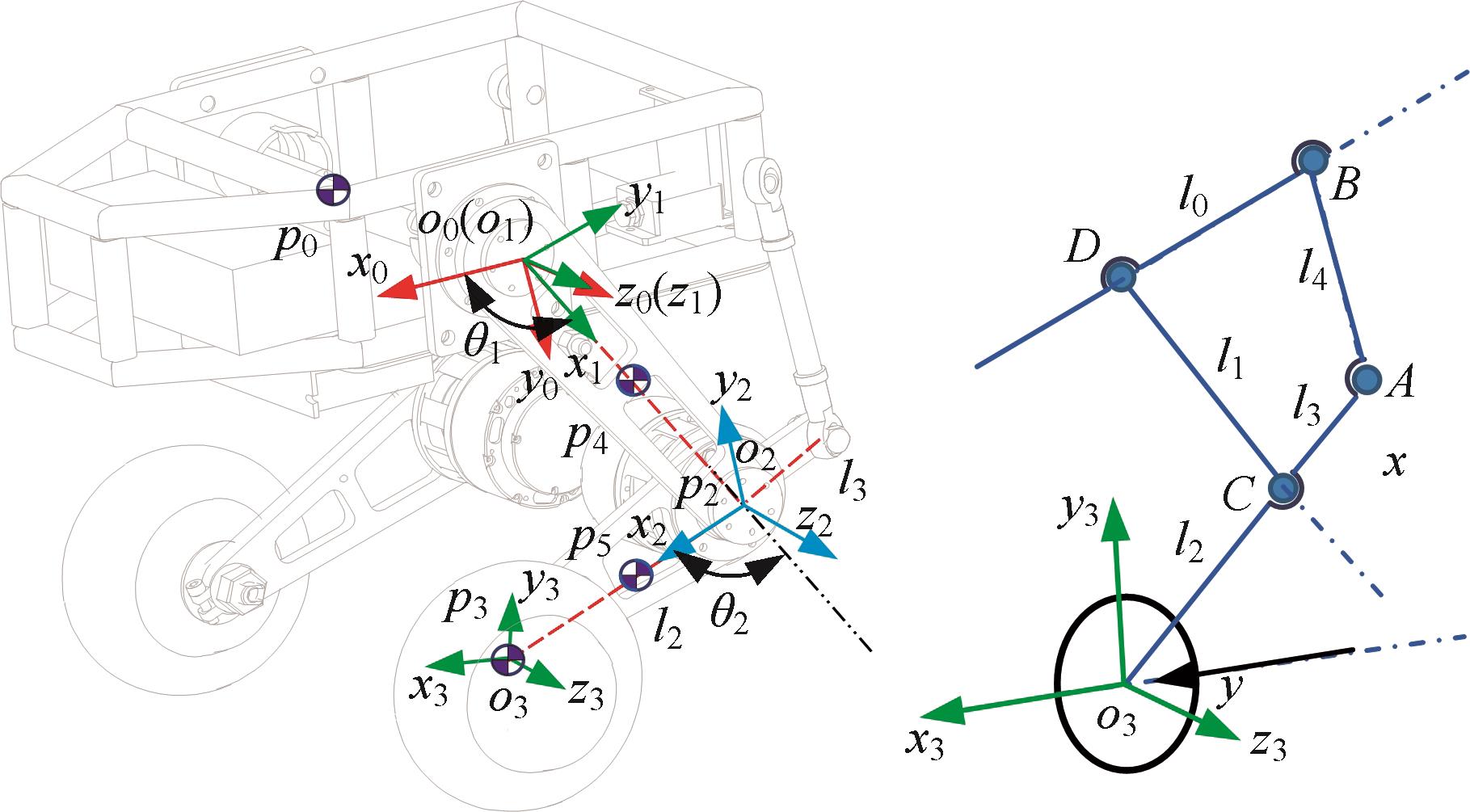
Fig.3 The kinematic model of the leg mechanism of the dual-wheel-legged unmanned platform
| l0 | l1 | l2 | l3 | l4 | |
|---|---|---|---|---|---|
| 长度/m | 0.1545 | 0.2 | 0.16 | 0.06 | 0.142 |
Tab.1 The parameters of mechanism dimensional
| l0 | l1 | l2 | l3 | l4 | |
|---|---|---|---|---|---|
| 长度/m | 0.1545 | 0.2 | 0.16 | 0.06 | 0.142 |
参数 部件 | 质量/kg | 质心位置/m | 转动惯量/(kg·m2) | 参考 坐标系 |
|---|---|---|---|---|
| 车架 | 3.84 | (0.033, | 0.0397 | o0x0y0z0 |
| 大臂 | 0.26 | (0.001 831,0,0) | 0.00183 | o1x1y1z1 |
| 小臂 | 0.79 | (0.008 323,0,0) | 0.00169 | o2x2y2z2 |
| 车轮 | 1.64 | (0,0,0) | 0.00284 | o3x3y3z3 |
Tab.2 The dimensions of wheel and frame
参数 部件 | 质量/kg | 质心位置/m | 转动惯量/(kg·m2) | 参考 坐标系 |
|---|---|---|---|---|
| 车架 | 3.84 | (0.033, | 0.0397 | o0x0y0z0 |
| 大臂 | 0.26 | (0.001 831,0,0) | 0.00183 | o1x1y1z1 |
| 小臂 | 0.79 | (0.008 323,0,0) | 0.00169 | o2x2y2z2 |
| 车轮 | 1.64 | (0,0,0) | 0.00284 | o3x3y3z3 |
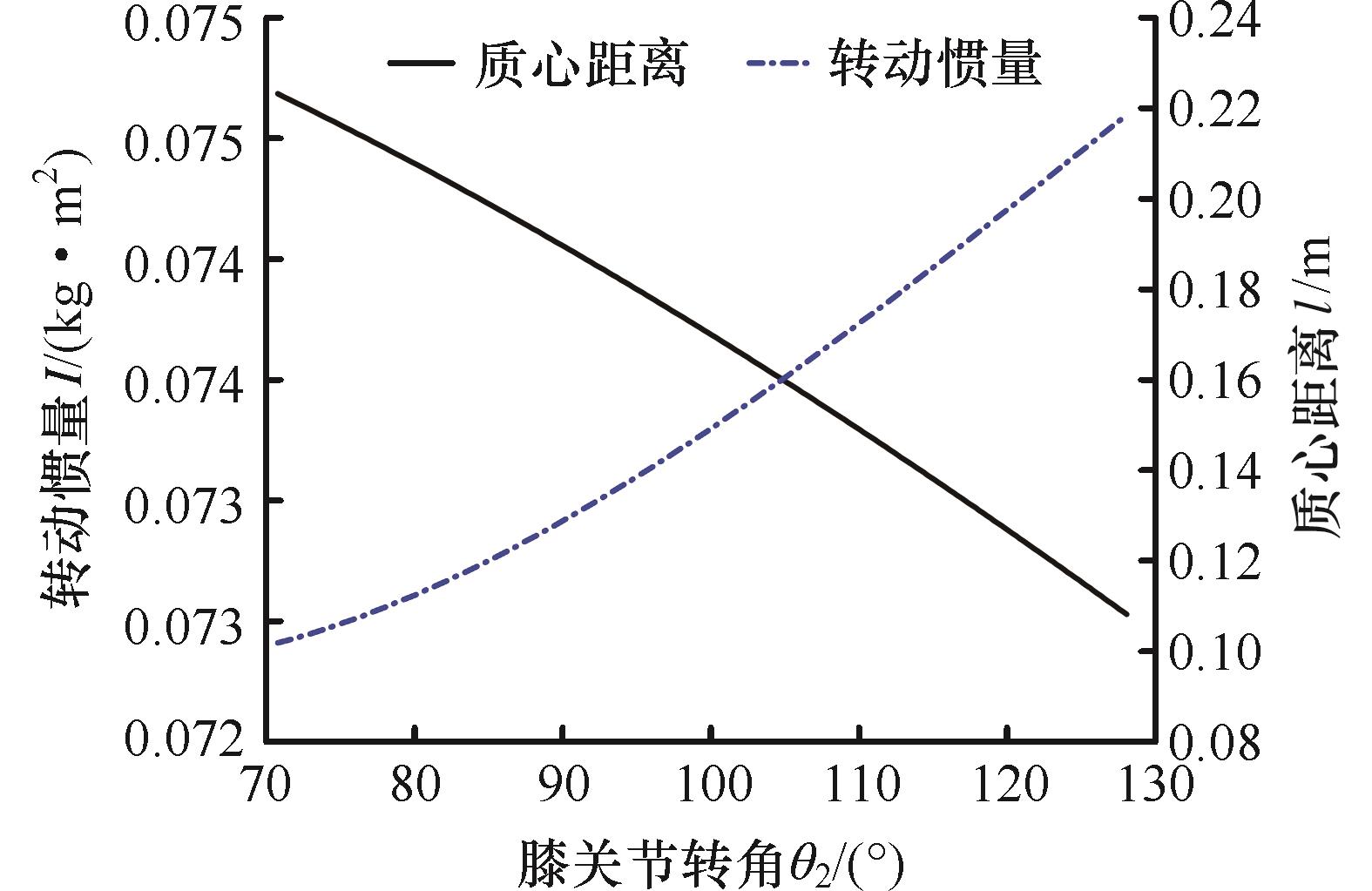
Fig.4 The curves of centroid position and moment of inertia versus knee joint rotation angle
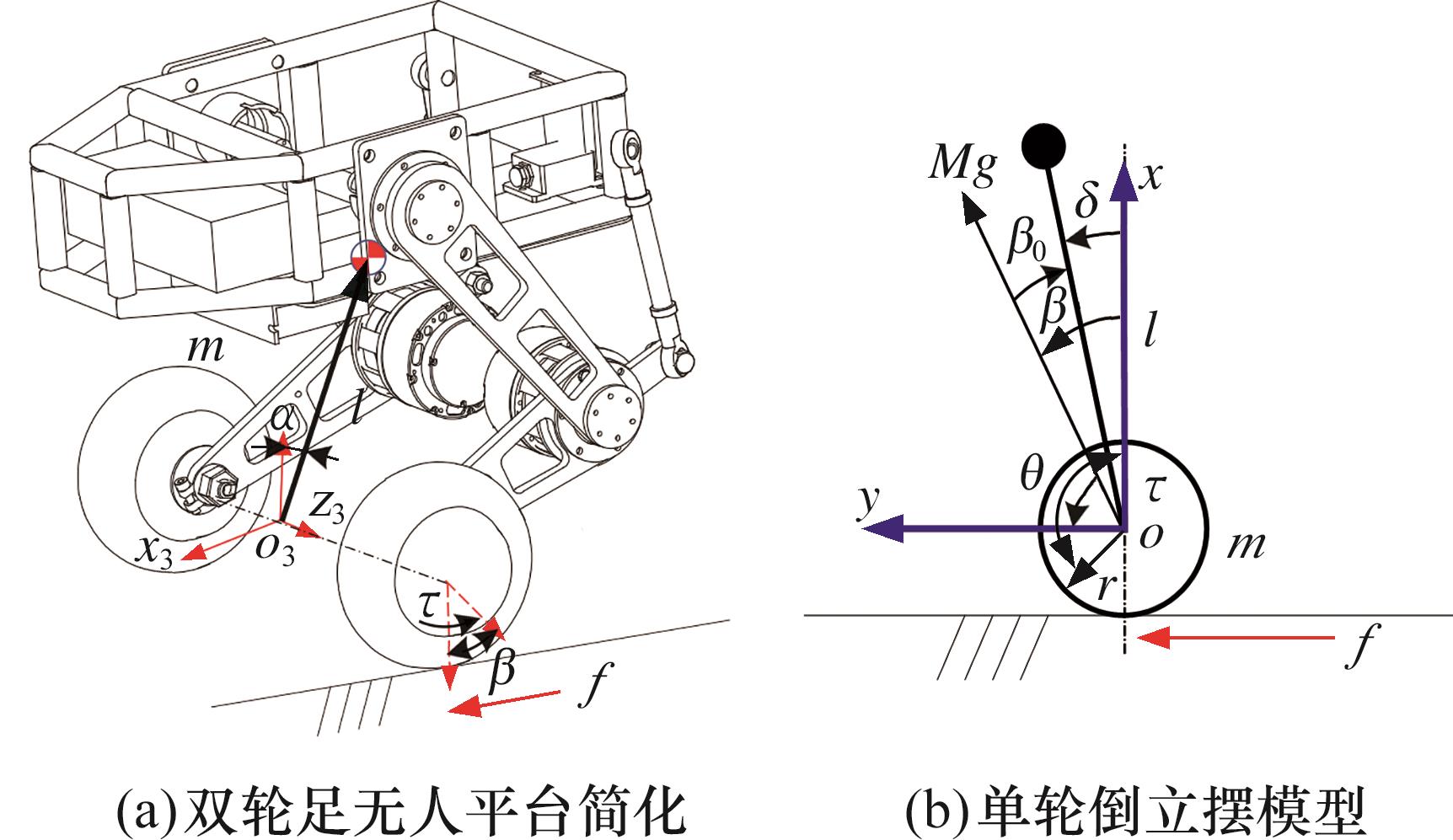
Fig.5 The simplified model of dual-wheel-legged platform
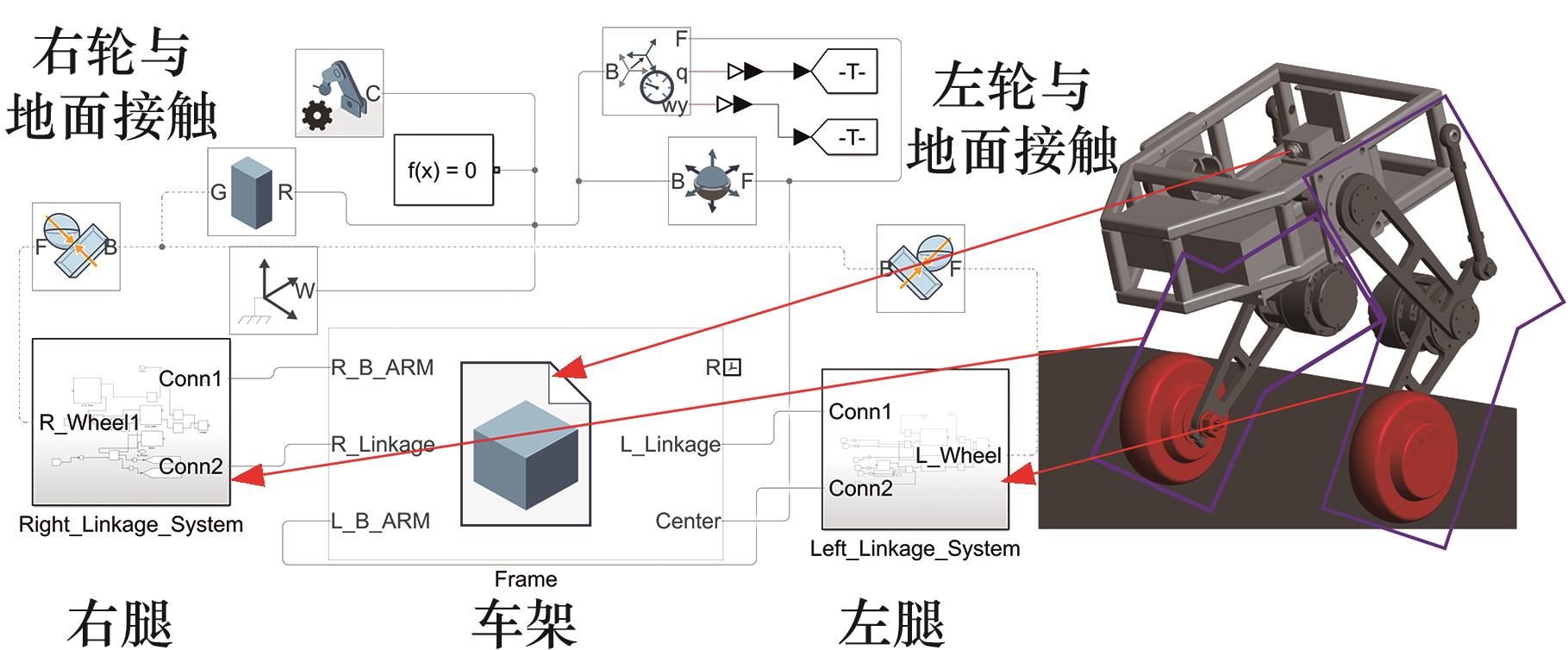
Fig.6 The Simulation model of the dual-wheel-legged unmanned platform based on simscape
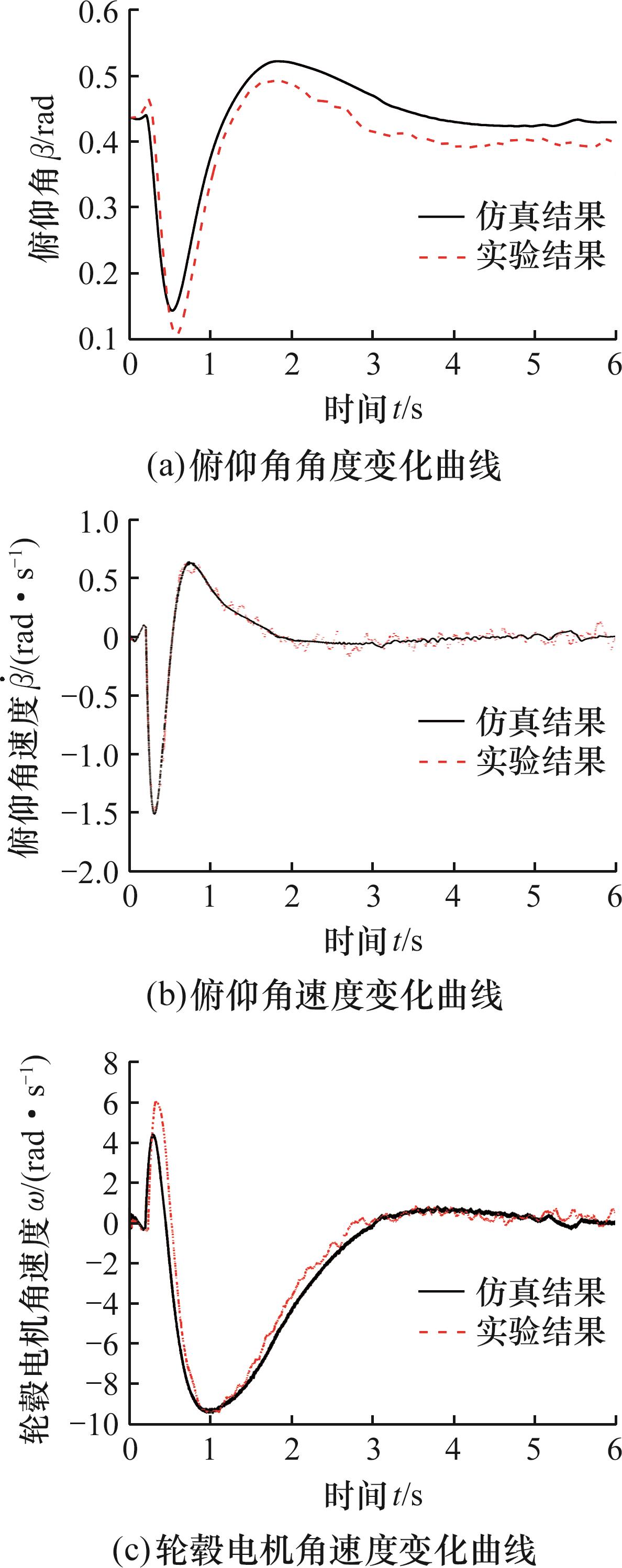
Fig.7 The curves of fixed-height self-balancing experiment and simulation
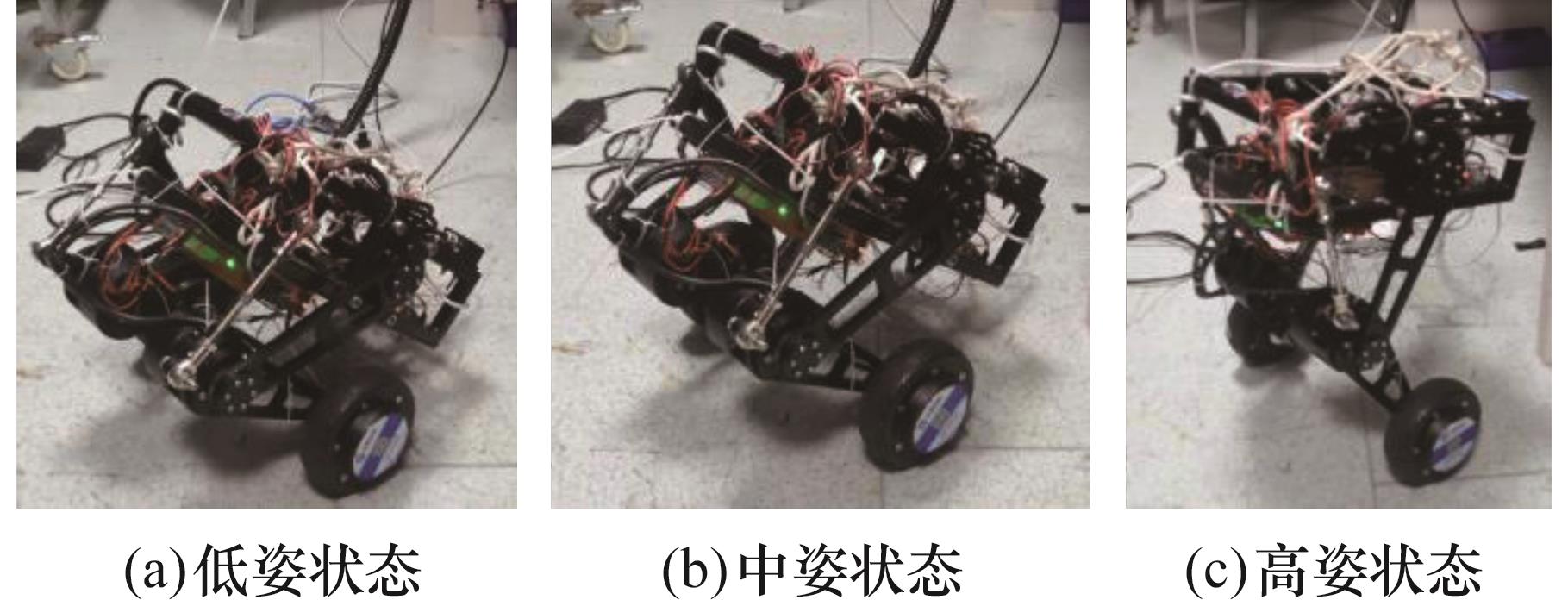
Fig.8 The variable-height self-balancing process experiment of the dual-wheel-legged unmanned platform
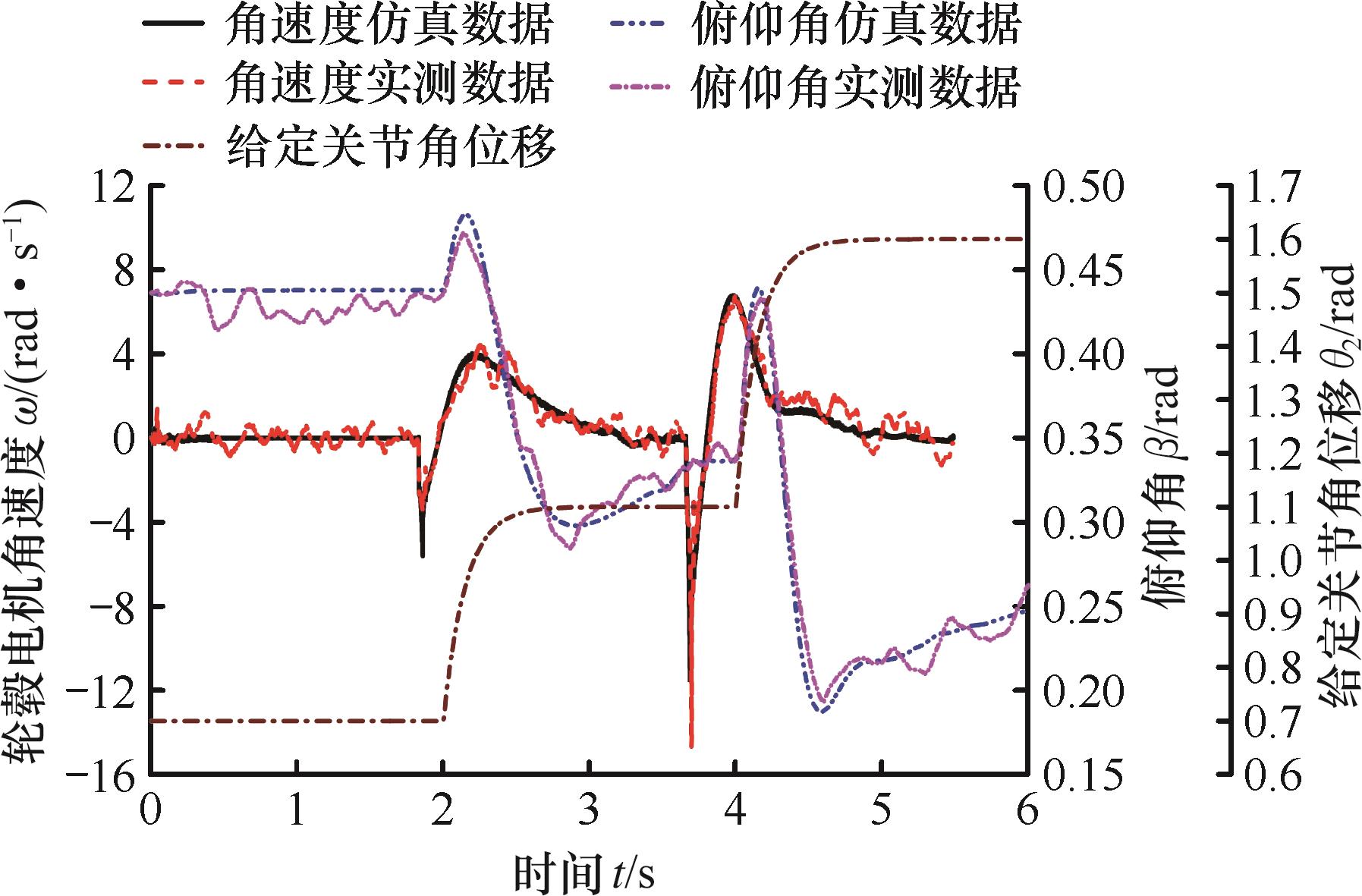
Fig.9 The variable-height of self-balancing experiment and simulation results of the dual-wheel-legged platform
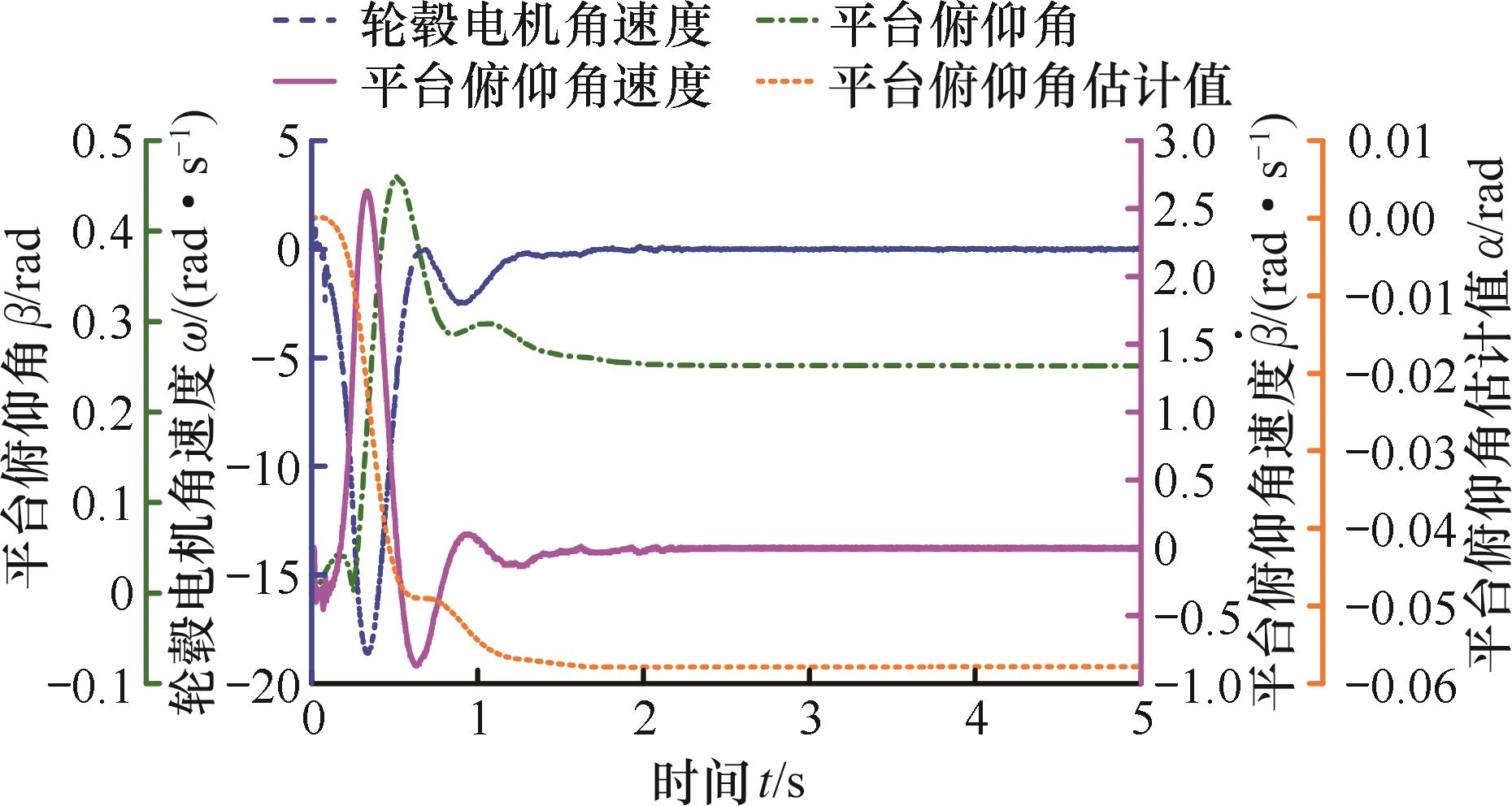
Fig.10 The self-balancing simulation results of the dual-wheel-legged platform
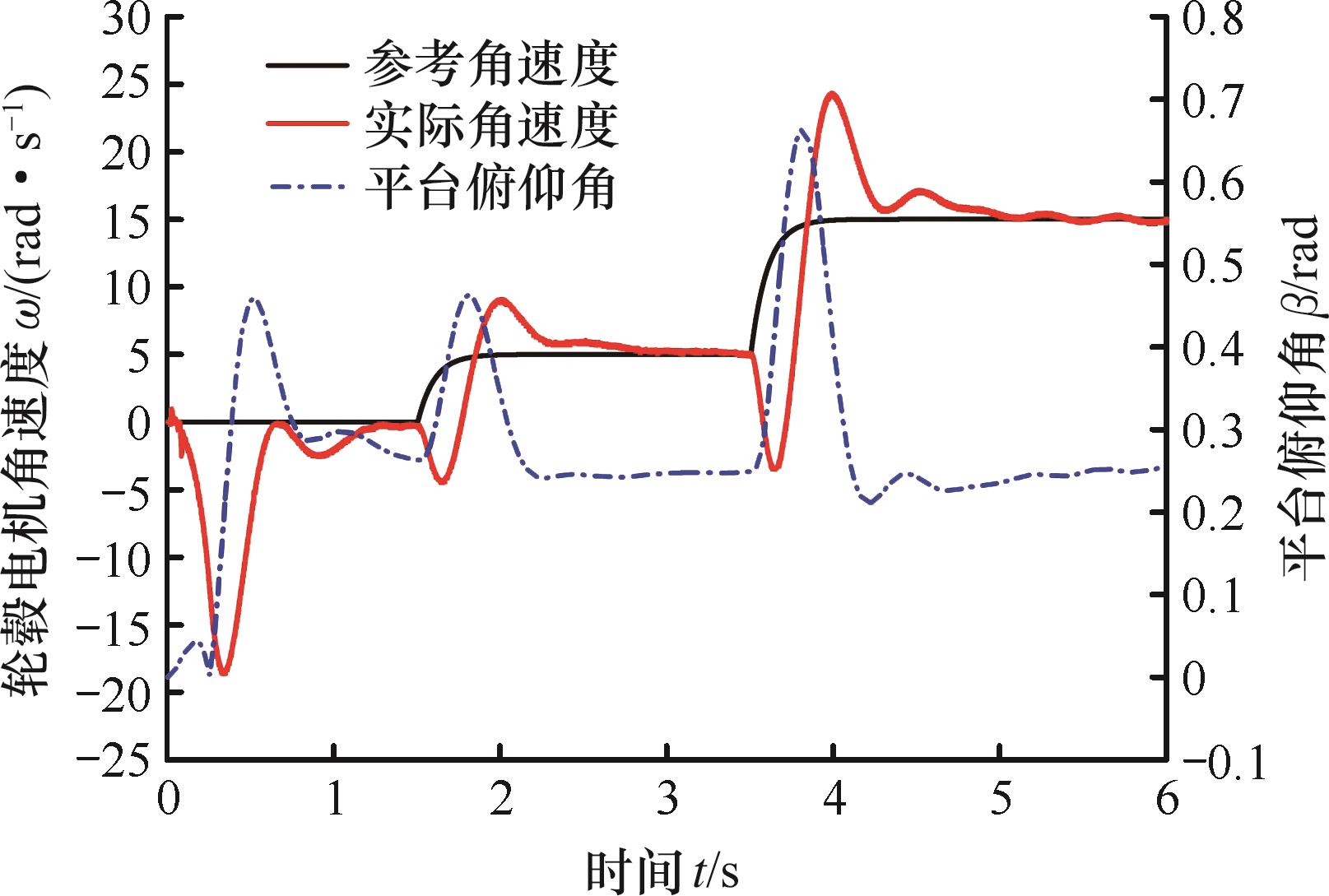
Fig.11 The simulation results of longitudinal angular velocity response of the dual-wheel-legged platform
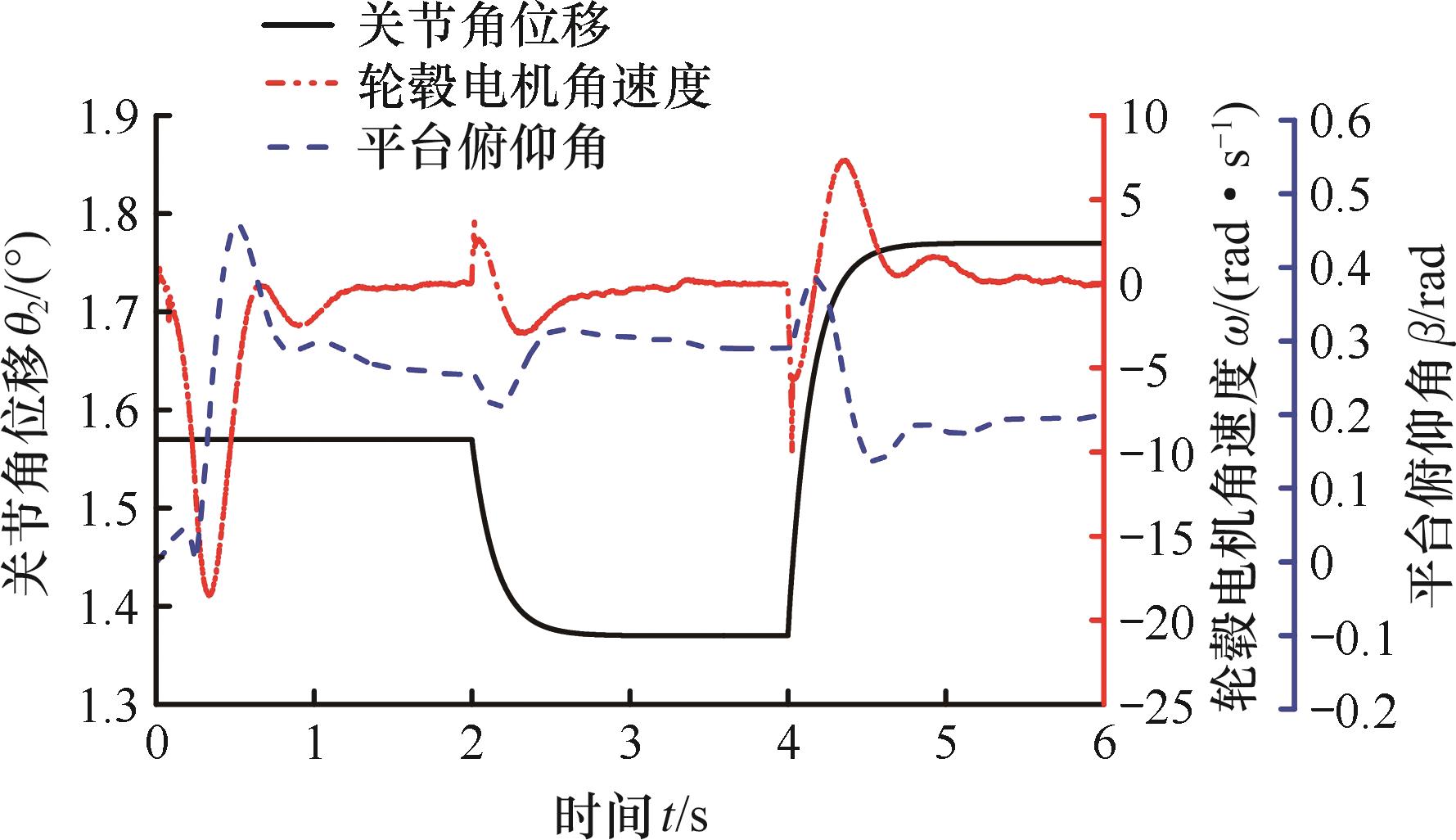
Fig.12 The simulation results of variable-height self-balancing of the dual-wheel-legged platform
| [1] | WANG S, CUI L, ZHANG J, et al. Balance Control of a Novel Wheel-legged Robot: Design and Experiment[C]∥ International Conference on Robotics and Automation. Xi'an, 2021:6782-6788. |
| [2] | 张弨.双足轮腿机器人系统设计与运动控制研究[D]. 哈尔滨:哈尔滨工业大学, 2020. . |
| ZHANG Zhao. Research on System Design and Locomotion Control of a Bipedal Leg-wheeled Robot[D]. Harbin: Harbin Institute of Technology,2020. | |
| [3] | VICTOR K, ALESSANDRO M, CIRO S, et al. Ascento: a Two-wheeled Jumping Robot[C]∥ International Conference on Robotics and Automation. Montreal, 2019: 7515-7521. |
| [4] | YANG Z Y, BIAN Z K, ZHANG W, et al. Design and Control of Multi-mode Wheeled-bipedal Robot with Parallel Mechanism[C]∥ International Conference on Communications, Computing and Artificial Intelligence. Shanghai,2023: 69-74. |
| [5] | YU J, ZHU Z, LU J, et al. Modeling and MPC-based Pose Tracking for Wheeled Bipedal Robot[J]. IEEE Robotics and Automation Letters, 2023, 8(12): 7881-7888 |
| [6] | WANG S, CUI L L, ZHANG J F, et al. Balance Control of a Novel Wheel-legged Robot: Design and Experiments[C] ∥International Conference on Robotics and Automation. Xi'an,2021:6782-6788. |
| [7] | ZHANG J F, LI Z X Li, WANG S, et al. Adaptive Optimal Output Regulation for Wheel-legged Robot Ollie: a Data-driven Approach[J]. Frontiers in Neurorobotics.2023,16: 1102259. |
| [8] | 单开正, 于海涛, 韩亮亮,等. 近似直驱双足机器人跳跃运动非线性优化及试验验证[J], 机械工程学报, 2021,57(13):153-162. |
| SHAN Kaizheng, YU Haitao, HAN Liangliang, et al. Nonlinear Optimization and Experimental Validation of a Quasi-direct-drive Bipedal Robot’s Jumping Motion [J]. Journal of Mechanical Engneering, 2021,57 (13): 153-162. | |
| [9] | 耿雪晴, 吴孟武, 华林.轮腿式可变形车轮设计及整车控制研究[J]. 中国机械工程,2023, 34 (12): 1446-1452. |
| GENG Xueqing, WU Mengwu, HUA Lin. Study on Design of Wheel-leg Deformable Wheel and Vehicle Control[J]. China Mechanical Engineering,2023, 34 (12): 1446-1452. | |
| [10] | BJELONIC M, BELLICOSO C D, DE V, et al. Keep Rollin’ Whole-body Motion Control and Planning for Wheeled Quadrupedal Robots[J]. IEEE Robotics and Automation Letters, 2019,4(2):2116-2123. |
| [11] | XIN Y X, CHAI H, LI Y B, et al. Speed and Acceleration Control for a Two Wheel-leg Robot Based on Distributed Dynamic Model and Whole-body Control[J]. IEEE Access,2019, (7):180630-180639. |
| [12] | 姜利彬. 一种双轮自平衡车的设计和实现[D]. 南京: 东南大学,2016. |
| JIANG Libin. Design and Implementation of a Two-wheeled Self-balanced Vehicle[D].Nanjing: Southeast University, 2016. | |
| [13] | ZHANG X F, ZHANG Y. H, SUN H. X,et al. Design and Dynamics Analysis of a Two-wheel Robot with Hopping Ability[J]. Robotics, 2014, 36: 355-361. |
| [1] | ZHAO Dingxuan, GUO Rui, WANG Shuo, YAN Changchang, WANG Zihe, ZHANG Tianci. Body Posture Planning Method for Unmanned Walking Excavators under Complex Terrain Environments [J]. China Mechanical Engineering, 2026, 37(1): 233-242. |
| [2] | GUO Wanjin, TIAN Yuxiang, LI Qianhui, CAO Chuqing, ZHAO Lijun, XU Mingkun, LIU Xiaoheng, HOU Xudong. Adaptive Variable Impedance Constant Force Control of Robotic Grinding under Unknown Environments [J]. China Mechanical Engineering, 2026, 37(1): 92-104. |
| [3] | TUO Jiying, XU Xiaonan, LI Jun, ZHANG Yuchen, HUANG An, HU Du, LIU Zilin. A Six-axis Robotic Arm Path Planning Based on Improved SAC Algorithm [J]. China Mechanical Engineering, 2025, 36(12): 2986-2992. |
| [4] | NI Tao, ZHAO Yahui, ZHAO Zeren, YANG Kaiqiang. Dynamics Modeling and Base Dynamics Parameter Determination of 6-UPRU Parallel Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2911-2919. |
| [5] | YANG Mingxing, SHEN Jiale, GAO Peng, ZHANG Xing, WANG Junxiang. Design of Continuum Robots and Compensation Strategies for Losses of Guide Paths [J]. China Mechanical Engineering, 2025, 36(12): 2820-2828. |
| [6] | Haiping LIANG, Yaoan LU, Weijia LIAN, Chengyong WANG. A Smooth Motion Path Planning Method for Six-axis Robots Considering Redundancy [J]. China Mechanical Engineering, 2025, 36(11): 2652-2657. |
| [7] | Jiaxiang DONG, Quanquan LIU, Xiping HU, Xuezhi ZHAO. Kinematic Modeling of a Novel Rigid⁃Flexible Hybrid Continuum Robots [J]. China Mechanical Engineering, 2025, 36(11): 2678-2684. |
| [8] | Yao DAI, Yong ZENG, Xueya ZHAO, Junhao WAN, Jintong GU, Xinyi ZHU. Research on Optimization of Uniformity of Robot Spraying Coatings for Changing Positions on Convex and Concave Characteristic Surfaces [J]. China Mechanical Engineering, 2025, 36(11): 2694-2703. |
| [9] | Jihuang LIANG, Weifeng WANG, Haibin WU. High-precision Industrial Robot Teaching Method Based on 6D Light Pens [J]. China Mechanical Engineering, 2025, 36(11): 2710-2719. |
| [10] | Xinyao TANG, Rong YIN, Xupeng WANG, Jiayin YANG, Xiaoyi LIU, Yuyang HAO. Design and Optimization of Human-machine Compatibility of Knee-ankle Exoskeletons [J]. China Mechanical Engineering, 2025, 36(10): 2369-2378. |
| [11] | Laixi ZHANG, Yanghaoyu ZHAO, Shengjie ZHU, Kaiwei MA, Fengyu XU. Modeling and Deformation Analysis of Dual Actuator Lung-like Soft Robots [J]. China Mechanical Engineering, 2025, 36(10): 2379-2388. |
| [12] | Haoxi ZHANG, Jie JIANG, Gang JIANG, Yue LI, Xing'an HAO. Study on Mechanics Model of Leg Lift Retardation for Hexapod Robot in Clay Environment [J]. China Mechanical Engineering, 2025, 36(09): 1996-2002. |
| [13] | Yixin ZHANG, Yinan MIAO, Zhiheng YI, Wenjing WAN, Xingjian WANG, Song ZENG, Shaoping WANG. A Novel Deformable Serial Pipeline Inspection Robots:Design, Modeling and Experimentation [J]. China Mechanical Engineering, 2025, 36(09): 2140-2149. |
| [14] | Hongyan ZHANG, Haoyang ZHAO, Huanfeng ZHAO, Nianxuan LI, Qinzheng SUN, Lingtao HUANG. An Explicit Geometric Feature Matching LiDAR SLAM Method [J]. China Mechanical Engineering, 2025, 36(08): 1824-1831. |
| [15] | YI Yali1, 2, CHENG Yangyang2, CHEN Xiaowei2, CHEN Yifan2, ZHANG Zhendong2, JIN Herong1, 2. A Determining Method for Milling Robot Poses Based on Principles of Maximum Stiffness [J]. China Mechanical Engineering, 2025, 36(07): 1544-1552. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||