

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (9): 2140-2149.DOI: 10.3969/j.issn.1004-132X.2025.09.026
Yixin ZHANG( ), Yinan MIAO, Zhiheng YI, Wenjing WAN, Xingjian WANG, Song ZENG, Shaoping WANG()
), Yinan MIAO, Zhiheng YI, Wenjing WAN, Xingjian WANG, Song ZENG, Shaoping WANG()
Received:2024-06-13
Online:2025-09-25
Published:2025-10-15
Contact:
Shaoping WANG
张益鑫(), 苗忆南, 易智恒, 万文静, 王兴坚, 曾松, 王少萍()
通讯作者:
王少萍
作者简介:张益鑫,男,1990年生,博士后研究人员。研究方向为智能机器人及机电系统建模控制。E-mail:zhang_yixin@buaa.edu.cn基金资助:CLC Number:
Yixin ZHANG, Yinan MIAO, Zhiheng YI, Wenjing WAN, Xingjian WANG, Song ZENG, Shaoping WANG. A Novel Deformable Serial Pipeline Inspection Robots:Design, Modeling and Experimentation[J]. China Mechanical Engineering, 2025, 36(9): 2140-2149.
张益鑫, 苗忆南, 易智恒, 万文静, 王兴坚, 曾松, 王少萍. 新型可变形串联管道检测机器人:设计、建模及实验[J]. 中国机械工程, 2025, 36(9): 2140-2149.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.09.026
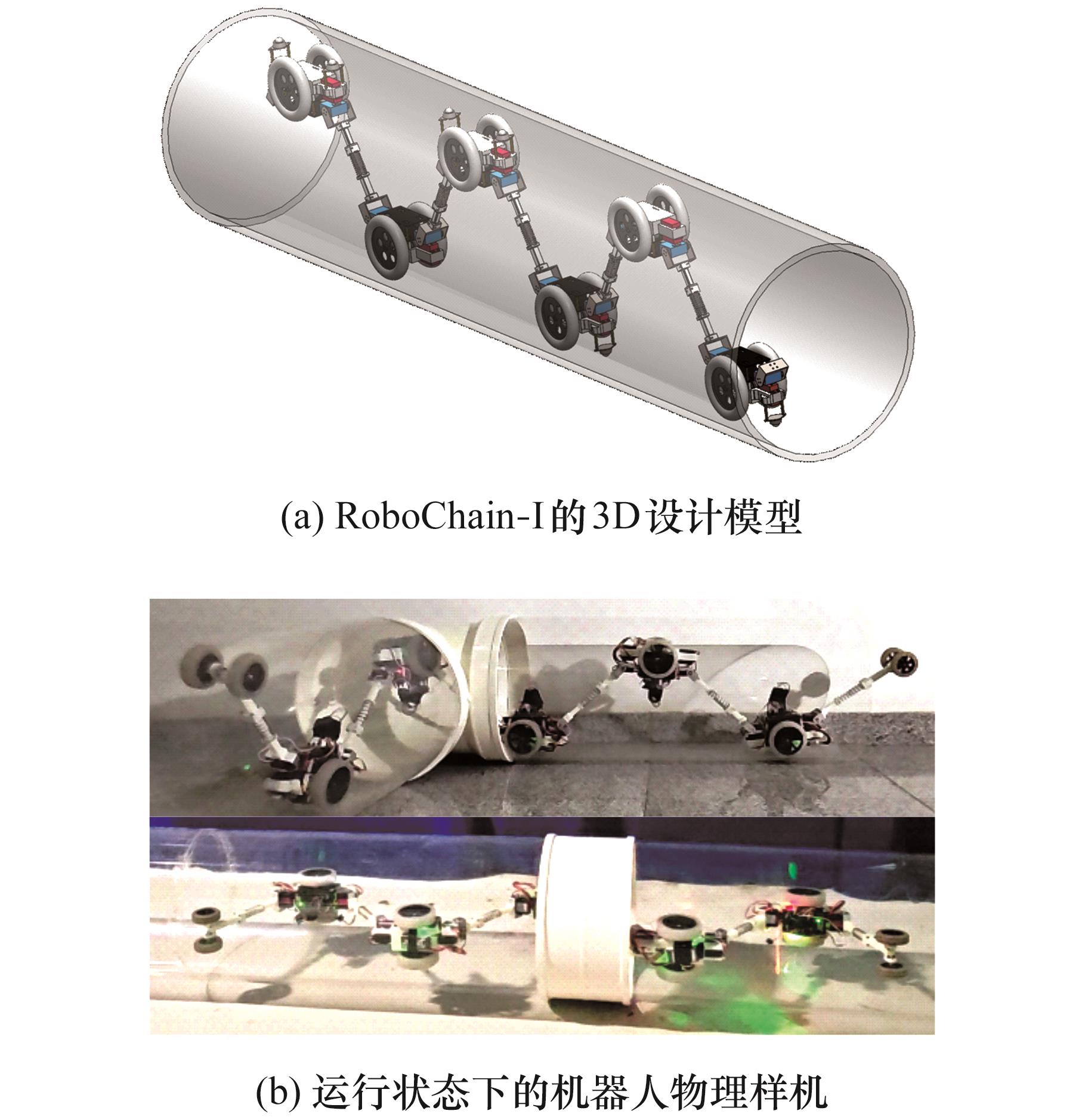
Fig.1 3D design model and prototype of the RoboChain-Ⅰ
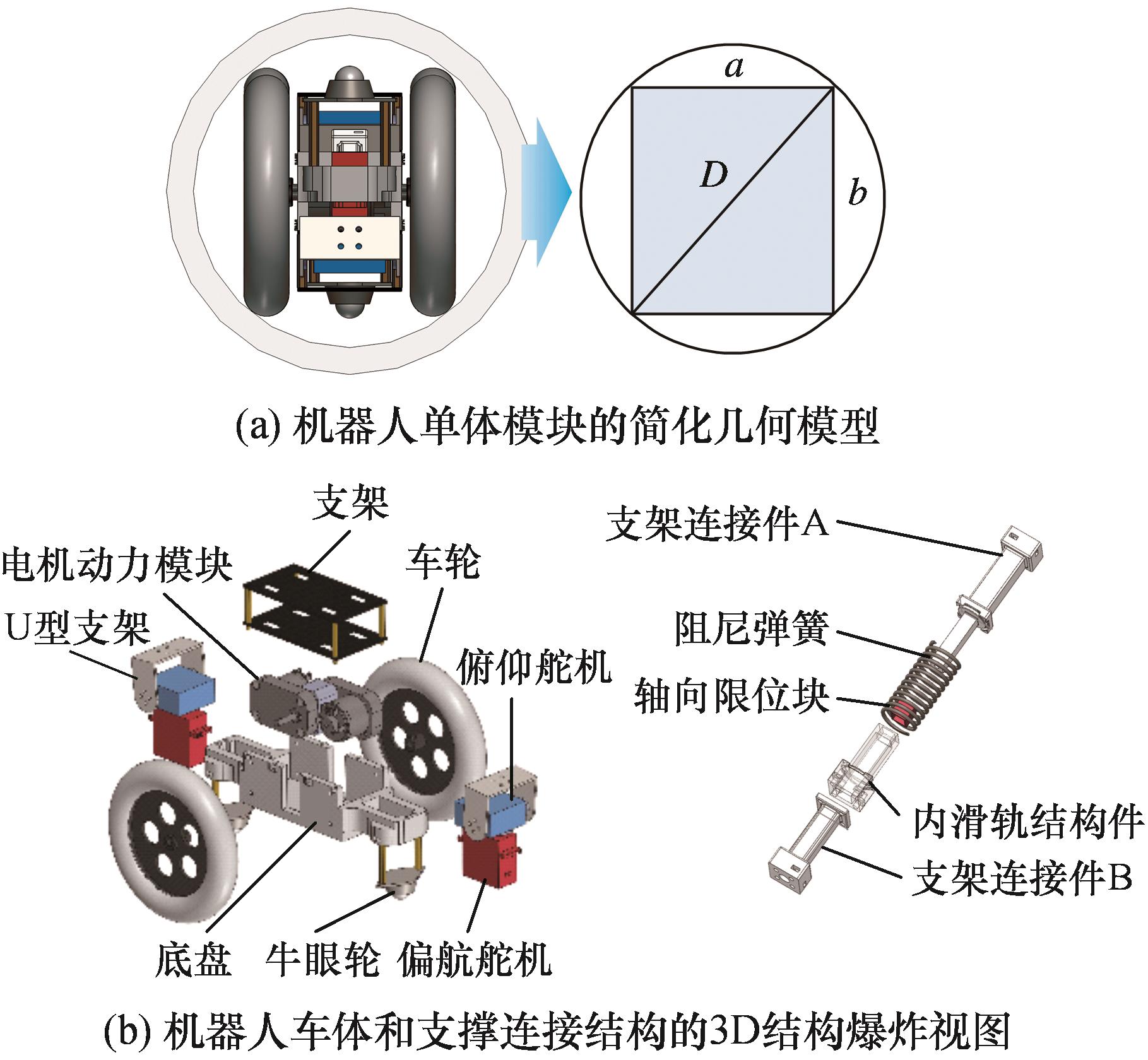
Fig.2 Simplified geometric model and 3D structural explosion view of the robot single module
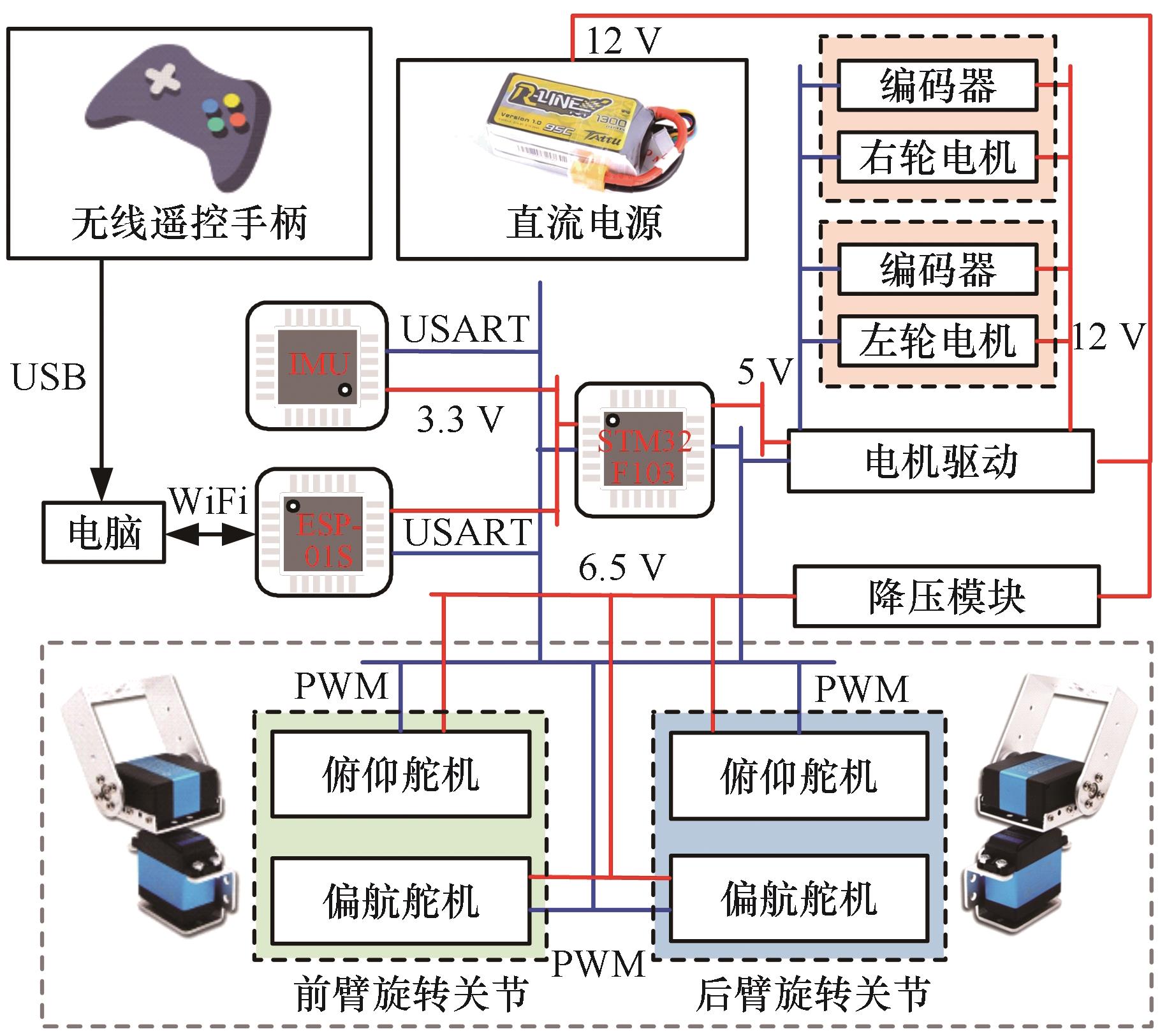
Fig.3 Electronic control system of a single module of RoboChain-Ⅰ
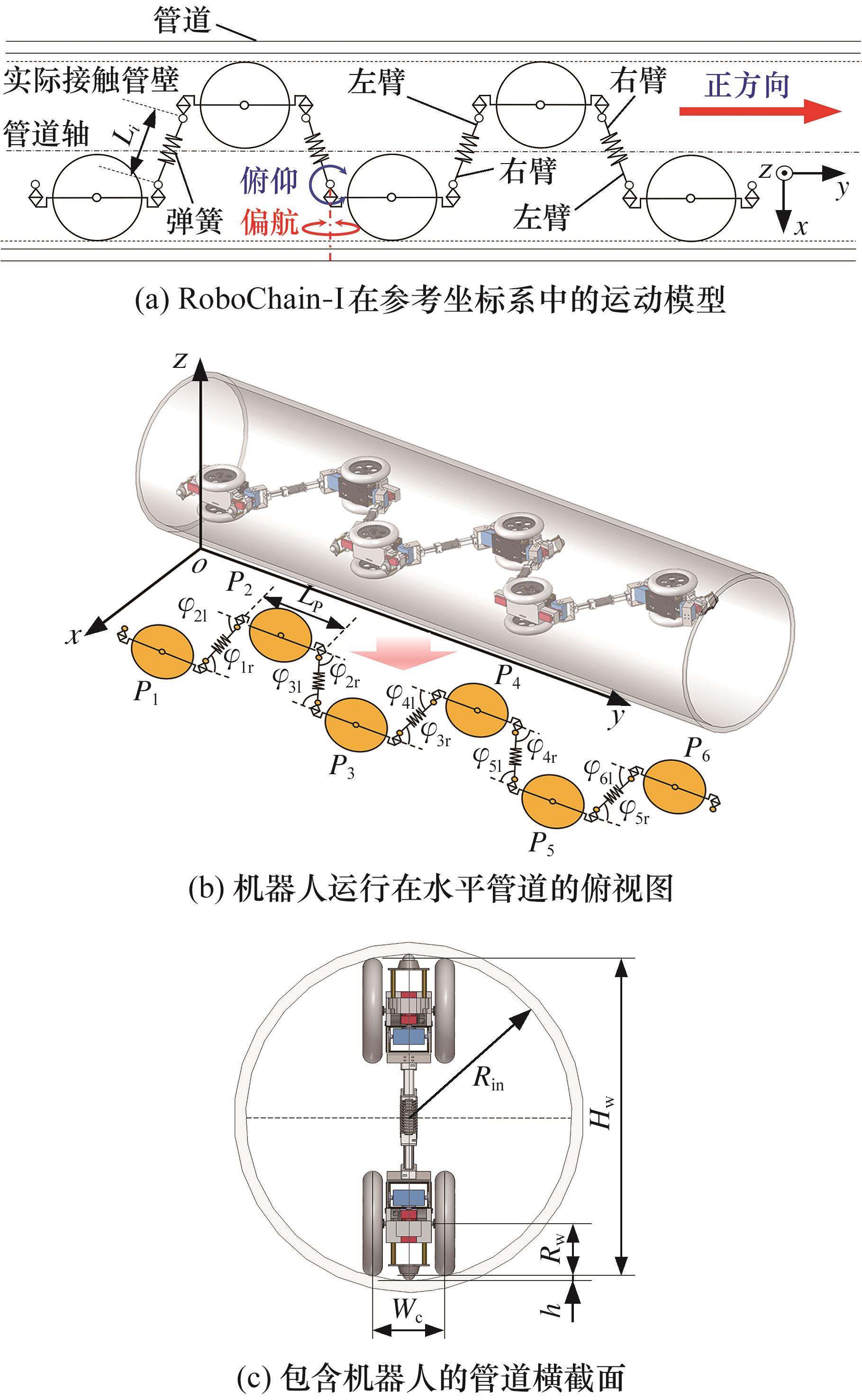
Fig.4 Motion model diagram and related parameter definitions of the robot in coordinate frame
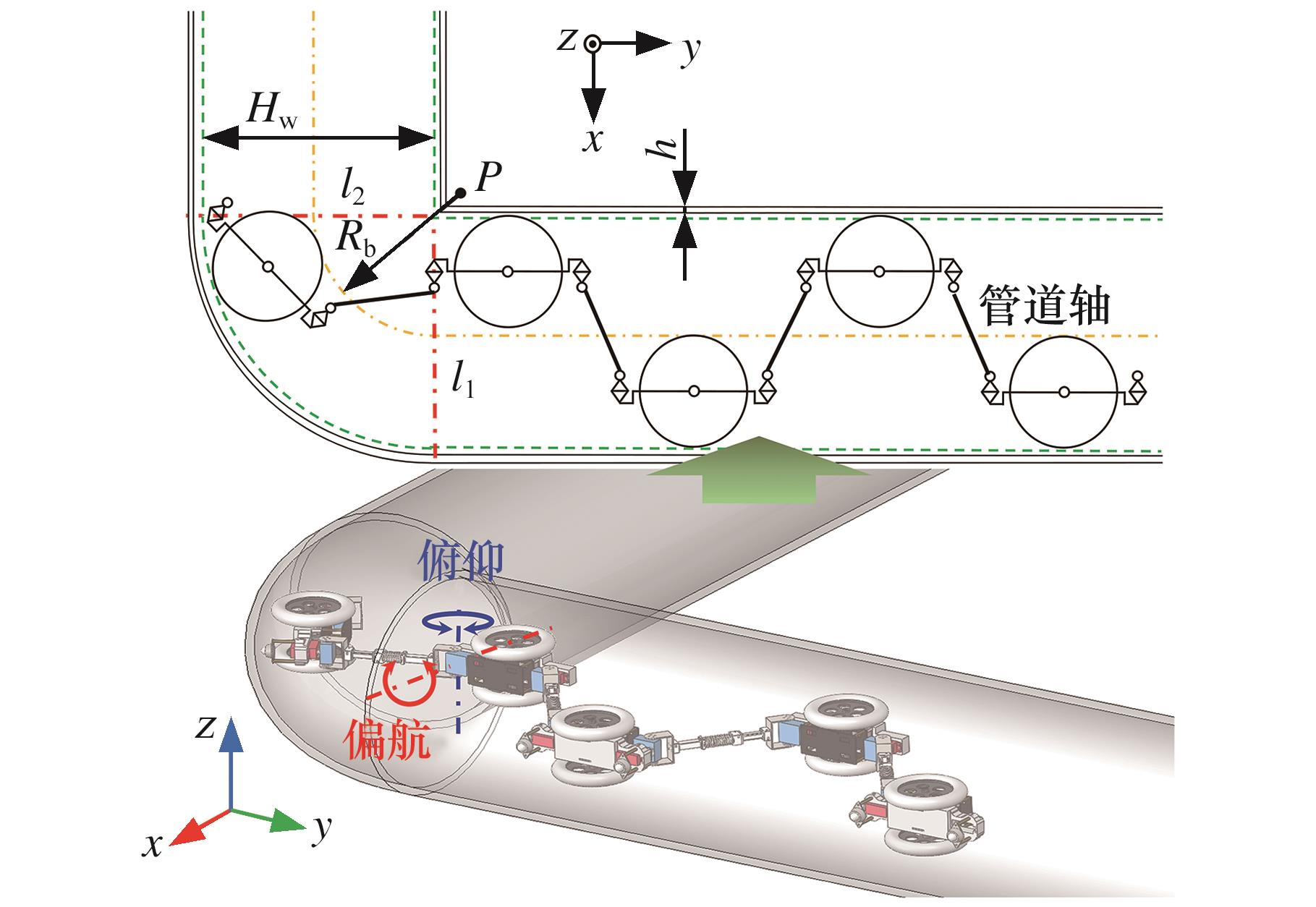
Fig.5 Turning motion of RoboChain-Ⅰ in L-shaped pipe
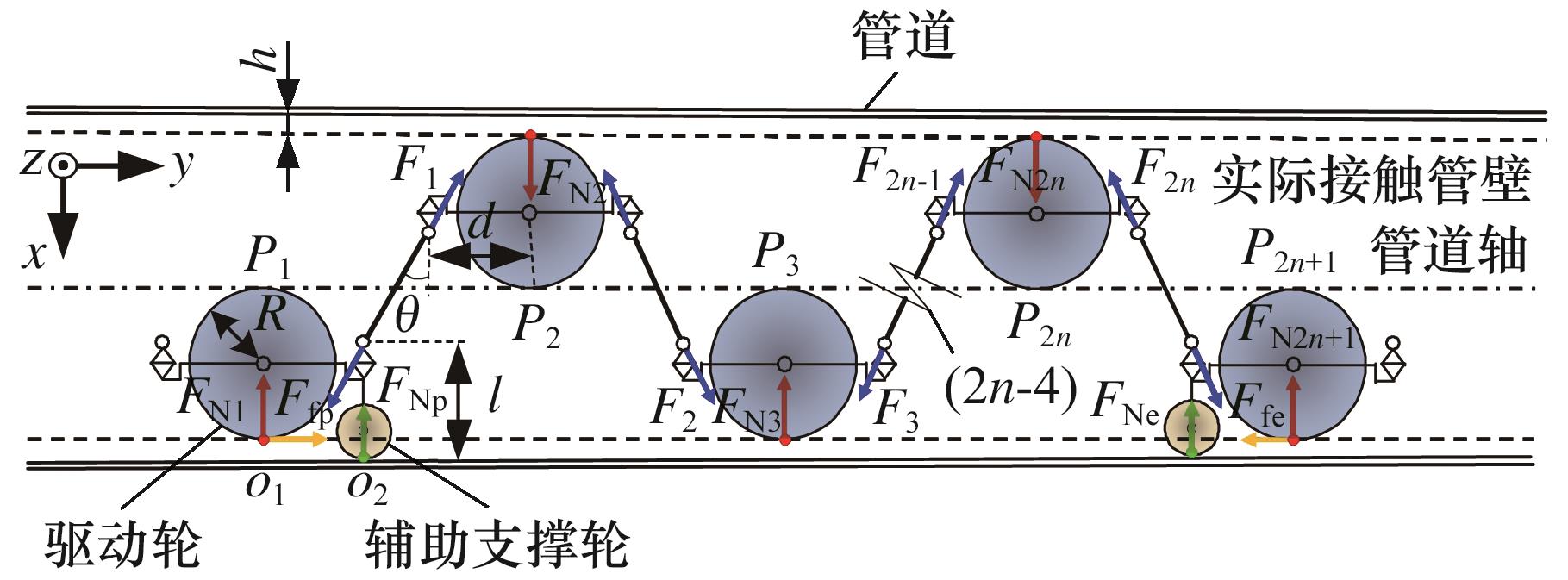
Fig.6 Static Analysis of RoboChain-Ⅰ
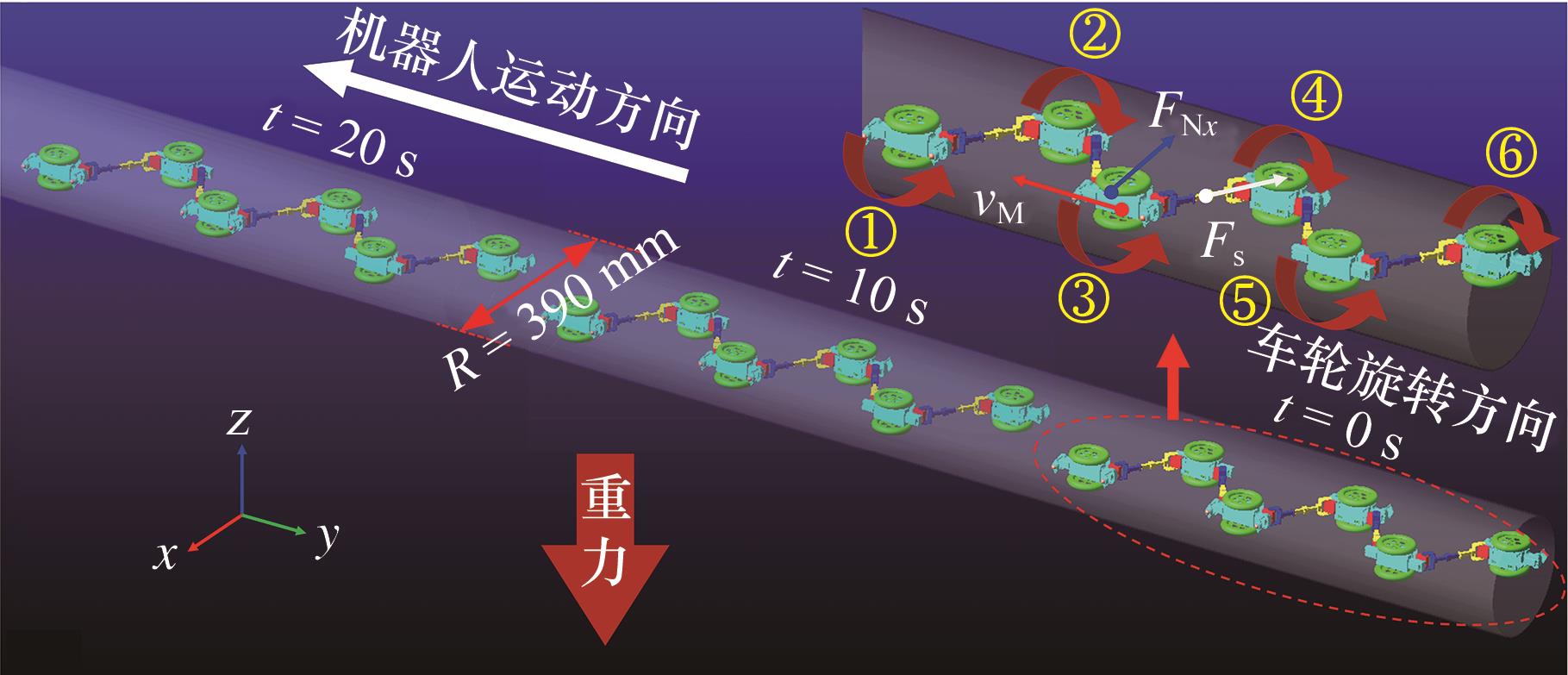
Fig.7 Simulation of RoboChain-Ⅰ driving in horizontal straight pipe
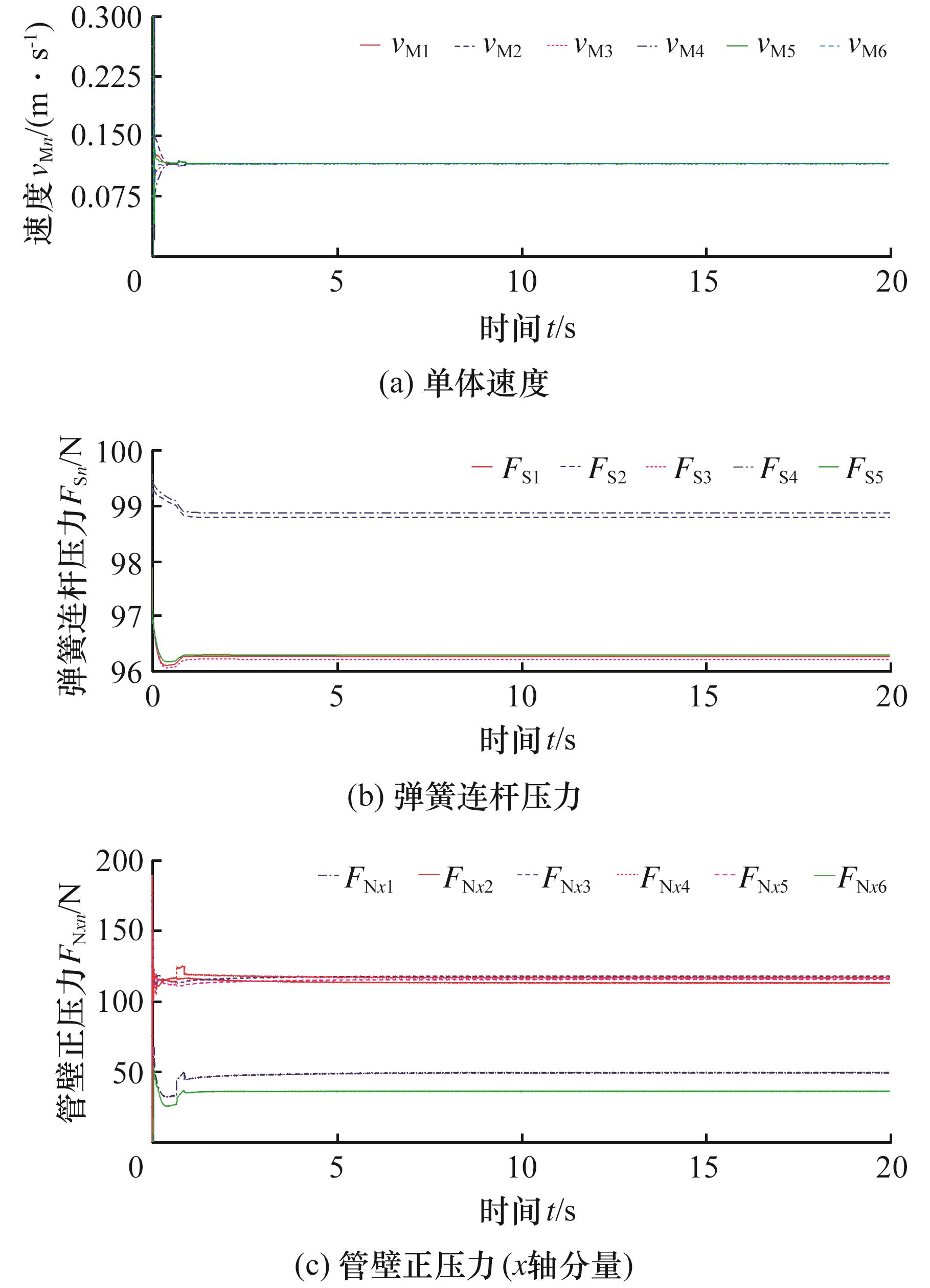
Fig.8 Simulation results of robot motion in pipe
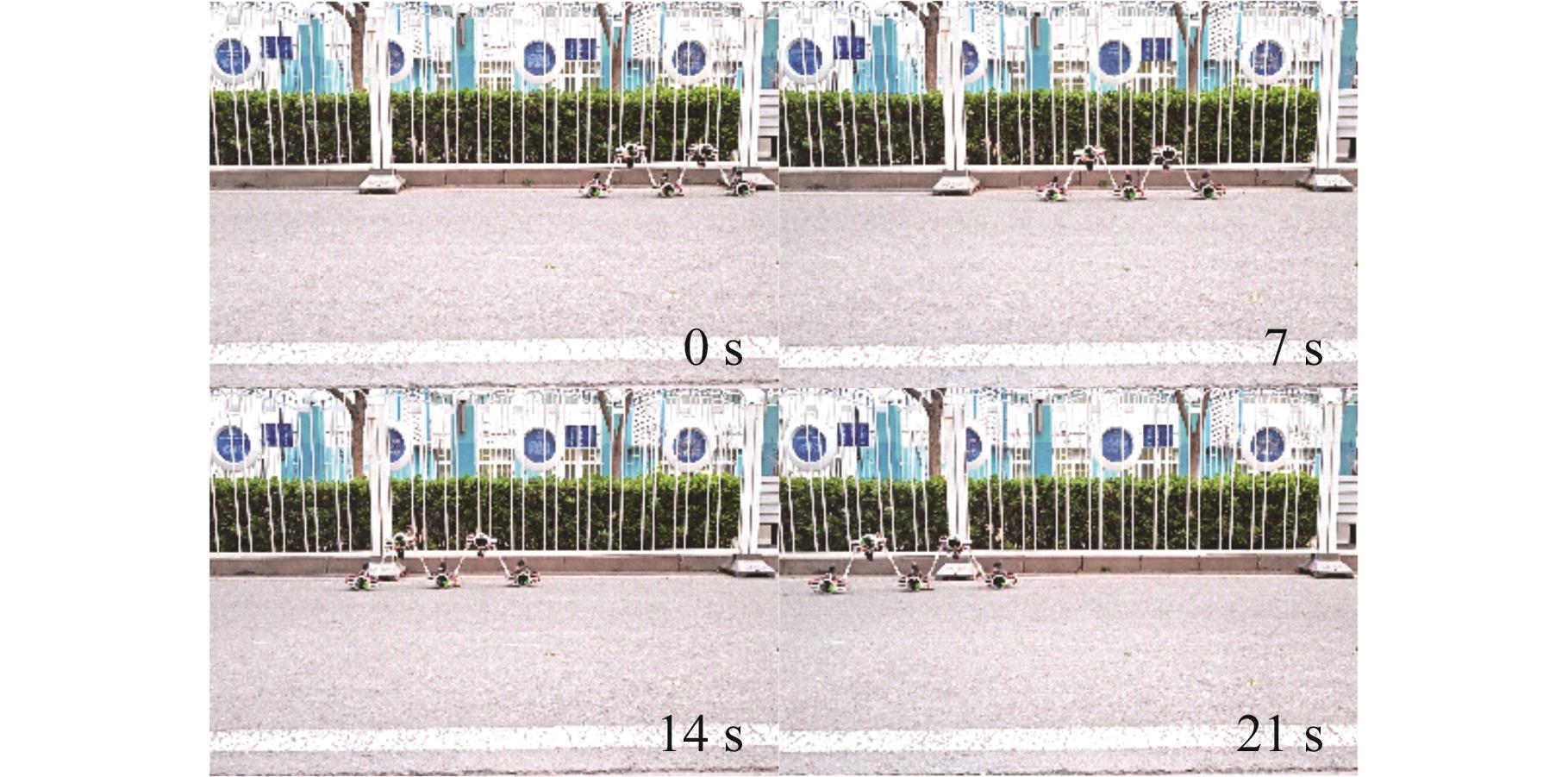
Fig.9 Experimental validation of motion on the ground
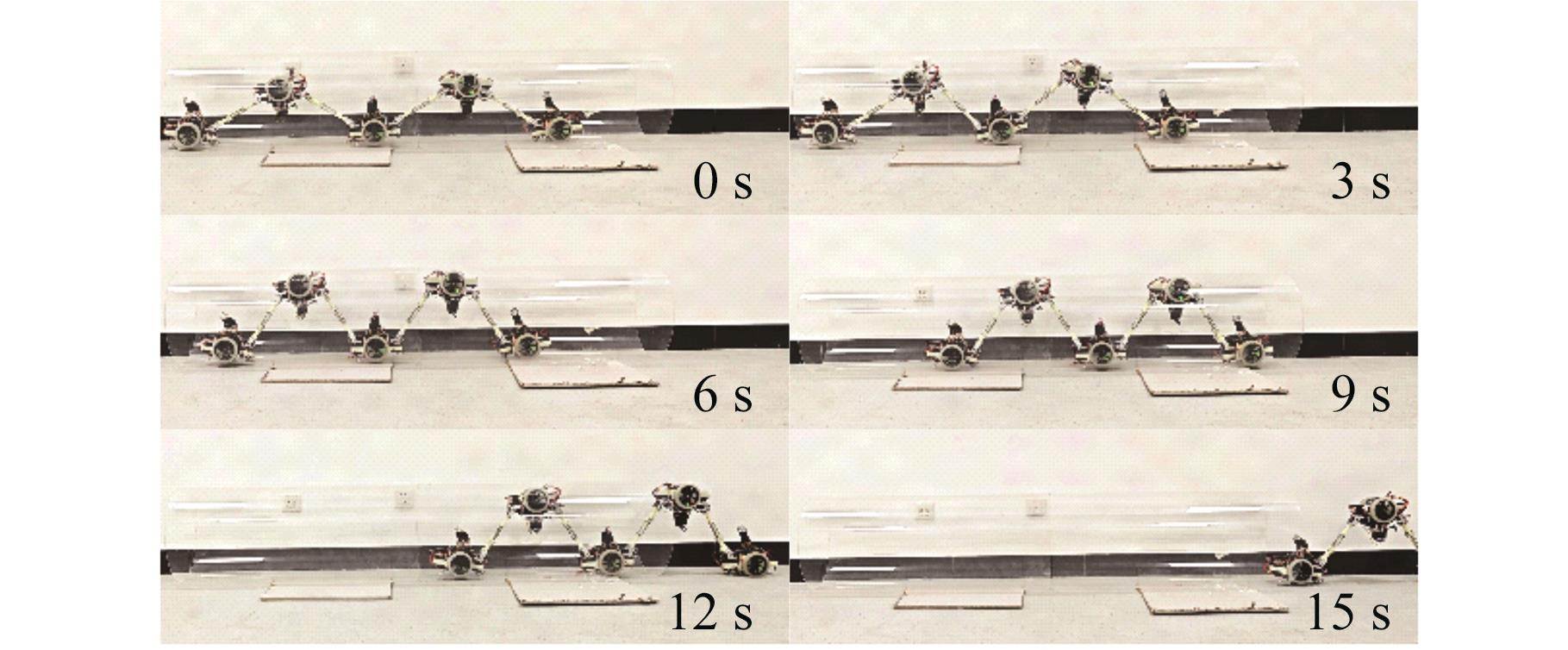
Fig.10 Experimental validation of motion in horizontal pipe
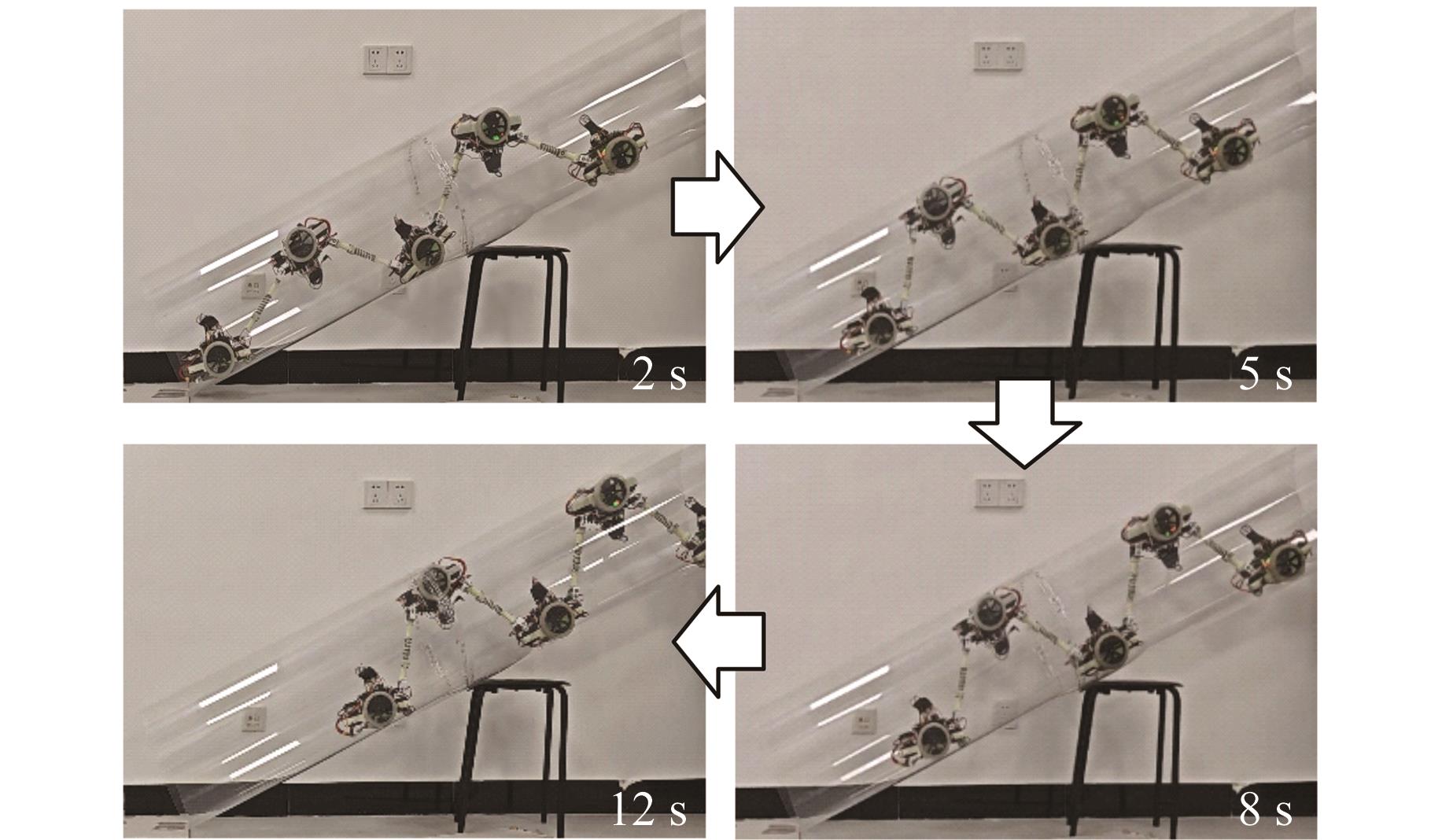
Fig.11 Experimental validation of motion in inclined pipe with an inclination angle of 30°
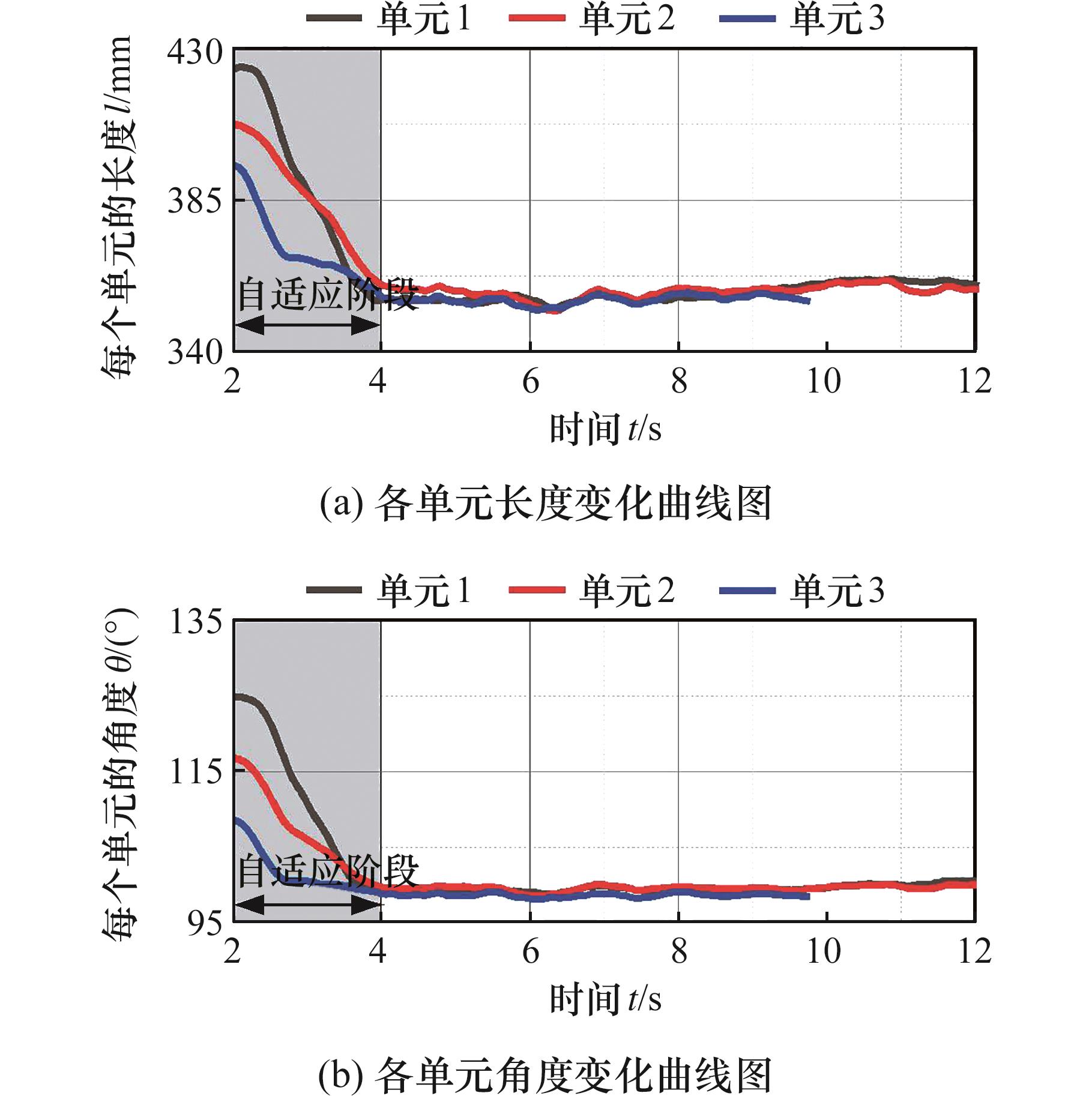
Fig.12 Experimental results of motion in inclined pipe with an inclination angle of 30°
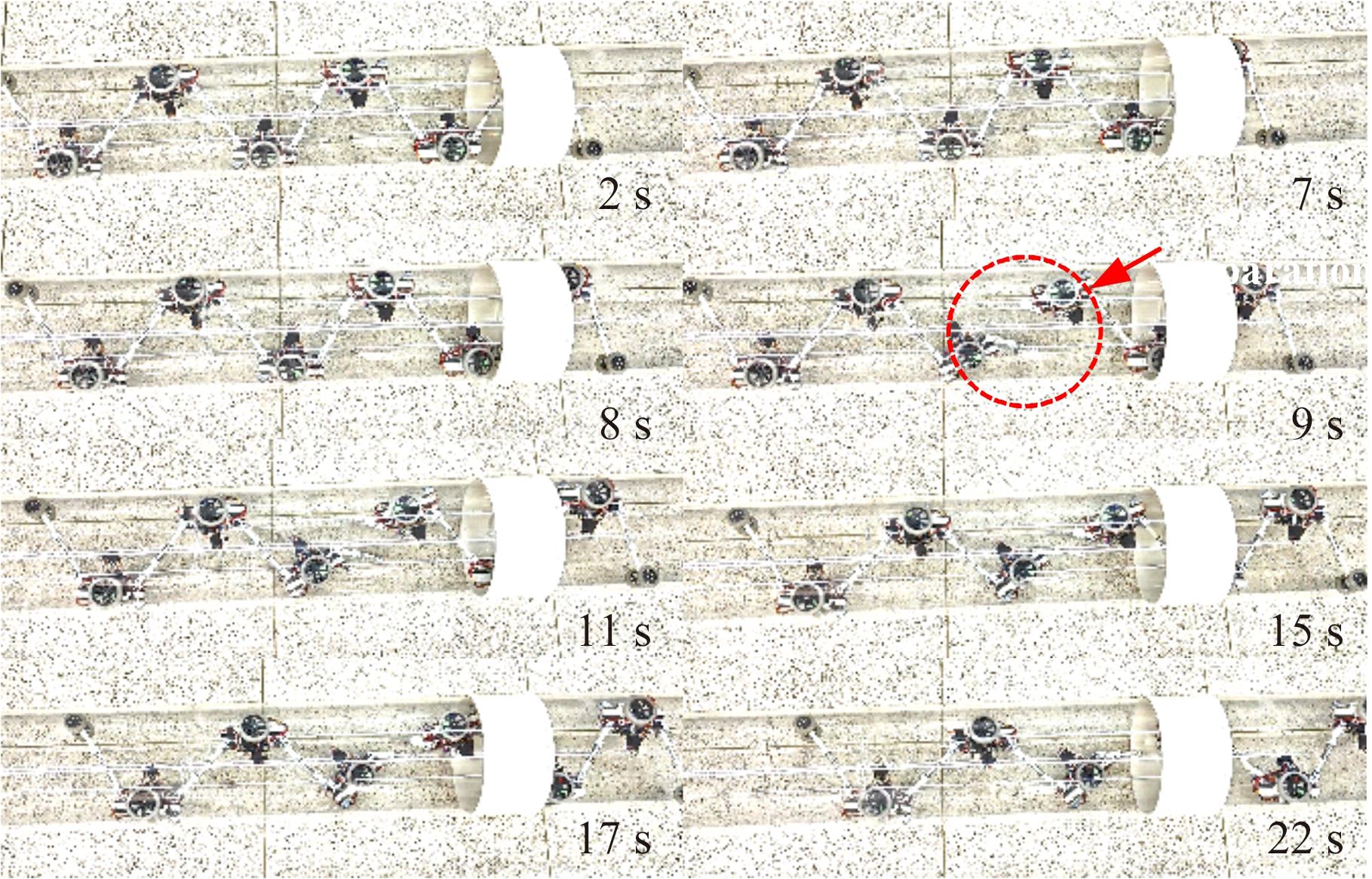
Fig.13 Experimental validation of controlled separation of robot’s minimal motion unit
| 参数 | 数值 |
|---|---|
| 可检测管径范围/mm | 175 ~ 440 |
| 地表最大运动速度/(m·s-1) | 0.87 |
| 管内最大运动速度/(m·s-1) | 0.4 |
| 最大转弯速度/(rad·s-1) | 0.3 |
| 弹簧杆可承受外力范围/N | 20 ~ 120 |
| 弹簧杆长度变化范围/mm | 160 ~ 200 |
| 操作电压/V | 12 |
Tab.1 Motion performance parameters of the RoboChain-Ⅰ
| 参数 | 数值 |
|---|---|
| 可检测管径范围/mm | 175 ~ 440 |
| 地表最大运动速度/(m·s-1) | 0.87 |
| 管内最大运动速度/(m·s-1) | 0.4 |
| 最大转弯速度/(rad·s-1) | 0.3 |
| 弹簧杆可承受外力范围/N | 20 ~ 120 |
| 弹簧杆长度变化范围/mm | 160 ~ 200 |
| 操作电压/V | 12 |
| [1] | 胡灯明, 骆晖. 国内外天然气管道事故分析[J]. 石油工业技术监督, 2009, 25(9):8-12. |
| HU Dengming, LUO Hui. The Analysis of Accidents on Foreign and Domestic Natural Gas Pipelines[J]. Technology Supervision in Petroleum Industry, 2009, 25(9):8-12. | |
| [2] | 赵汉青. 我国油气管道的事故成因及环境预防措施[J]. 油气储运, 2015, 34(4):368-372. |
| ZHAO Hanqing. Causes of Oil and Gas Pipeline Incidents in China and Environmental Precautions[J]. Oil & Gas Storage and Transportation, 2015, 34(4):368-372. | |
| [3] | SALAZAR-BAÑO A G, CHAS-AMIL M L, RUZO-SANMARTÍN E, et al. The Key Role of Risk Perception in Preparedness for Oil Pipeline Accidents in Urban Areas:a Sequential Mediation Analysis[J]. The Extractive Industries and Society, 2024, 17:101398. |
| [4] | DEBENEST P, GUARNIERI M, HIROSE S. PipeTron Series—Robots for Pipe Inspection[C]∥Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry. Foz do Iguassu, 2014:1-6. |
| [5] | VERMA A, KAIWART A, DUBEY N D, et al. A Review on Various Types of In-pipe Inspection Robot[J]. Materials Today:Proceedings, 2022, 50:1425-1434. |
| [6] | SHAO Lei, WANG Yi, GUO Baozhu, et al. A Review over State of the Art of In-pipe Robot[C]∥2015 IEEE International Conference on Mechatronics and Automation (ICMA). Beijing, 2015:2180-2185. |
| [7] | TANG Chao, DU Boyuan, JIANG Songwen, et al. A Pipeline Inspection Robot for Navigating Tubular Environments in the Sub-centimeter Scale[J]. Science Robotics, 2022, 7(66):eabm8597. |
| [8] | ISMAIL I N, ANUAR A, SAHARI K S M, et al. Development of In-pipe Inspection Robot:a Review[C]∥2012 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology (STUDENT). Kuala Lumpur, 2012:310-315. |
| [9] | TANAKA M, TANAKA K. Control of a Snake Robot for Ascending and Descending Steps[J]. IEEE Transactions on Robotics, 2015, 31(2):511-520. |
| [10] | KIM H M, CHOI Y S, LEE Y G, et al. Novel Mechanism for In-pipe Robot Based on a Multiaxial Differential Gear Mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1):227-235. |
| [11] | 郭登辉, 陈原. 管道攀爬机器人非接触变磁隙式永磁吸附机构的设计与吸附性能优化[J]. 中国机械工程, 2021, 32(14):1659-1668. |
| GUO Denghui, CHEN Yuan. Design and Adsorption Performance Optimization of Non-contact Variable Magnetic Gap Type Permanent Magnet Absorption Mechanisms of Pipe Climbing Robots[J]. China Mechanical Engineering, 2021, 32(14):1659-1668. | |
| [12] | ROH S G, CHOI H R. Differential-drive In-pipe Robot for Moving Inside Urban Gas Pipelines[J]. IEEE Transactions on Robotics, 2005, 21(1):1-17. |
| [13] | KAKOGAWA A, MA Shugen. Design of a Multilink-articulated Wheeled Pipeline Inspection Robot Using Only Passive Elastic Joints[J]. Advanced Robotics, 2018, 32(1):37-50. |
| [14] | KAKOGAWA A, MA Shugen. A Multi-link In-pipe Inspection Robot Composed of Active and Passive Compliant Joints[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, 2020:6472-6478. |
| [15] | LIU Yahong, SUN Yi, CAO Kai, et al. Wheel-legged In-pipe Robot with a Bioinspired Hook and Dry Adhesive Attachment Device[J]. Journal of Bionic Engineering, 2024, 21(3):1208-1222. |
| [16] | FANG Delei, JIA Guofeng, WU Junran, et al. A Novel Worm-like In-pipe Robot with the Rigid and Soft Structure[J]. Journal of Bionic Engineering, 2023, 20(6):2559-2569. |
| [17] | ZHANG Yixin, CHEN Hanli, WANG Lu, et al. Design of a Novel Modular Serial Pipeline Inspection Robot[C]∥2023 IEEE International Conference on Mechatronics and Automation (ICMA). Harbin, 2023:1847-1852. |
| [18] | SAWABE H, NAKAJIMA M, TANAKA M, et al. Control of an Articulated Wheeled Mobile Robot in Pipes[J]. Advanced Robotics, 2019, 33(20):1072-1086. |
| [1] | YUAN Zhiqun, LI Yuehan, LIN Li, SUN Pengfei, ZHANG Yi, . Longitudinal and Lateral Coordination Control of Cars with Aerodynamic Interference of Wind-vehicle-bridge System [J]. China Mechanical Engineering, 2024, 35(04): 731-741. |
| [2] | DONG Zhenle, YANG Yinghao, YAO Jianyong, ZHANG Zheng, LI Geqiang, WANG Shuai. Asymptotic Prescribed Performance Tracking Control of Electro-hydraulic Servo Systems under Matched and Unmatched Disturbances [J]. China Mechanical Engineering, 2022, 33(20): 2437-2443. |
| [3] | PAN Guowei, CHEN Wenliang. Optimization of Posture Adjustment Trajectory of a Redundant and Hybrid ADRM [J]. China Mechanical Engineering, 2021, 32(21): 2571-2576,2589. |
| [4] | LI Jingyi, YAO Ligang, DONG Hui. Motion Detection for Soft Manipulators Based on Three-wire Structures [J]. China Mechanical Engineering, 2021, 32(06): 721-728. |
| [5] |
CHENG Xianfu1;ZHOU Jian1;XIAO Renbin2;LIU Junjie1;YOU Minhua1.
Review of Product Modular Design from Perspective of Green Manufacturing
[J]. China Mechanical Engineering, 2020, 31(21): 2612-2625.
|
| [6] | LI Hao, TAO Fei, WEN Xiaoyu, WANG Haoqi, LUO Guofu. Modular Design of Product-service Systems Oriented to Mass Personalization [J]. China Mechanical Engineering, 2018, 29(18): 2204-2214,2249. |
| [7] | Xiao Chao, Zhou Yulin, Sheng Haiyong, Hou Yulei. Modular Design of Mechanical Noumenon for Industrial Robots [J]. China Mechanical Engineering, 2016, 27(08): 1018-1025. |
| [8] | Wang Yaxing, Wu Liqun, Lin Zhipeng, Ye Miaohong, Zhuang Long. Study on Motion Control Way for Acoustic Suspended Particles Inside a Component [J]. China Mechanical Engineering, 2015, 26(22): 2996-3001. |
| [9] | Cheng Xin, Wu Huachun, Hu Yefa, Zhou Yunfei. Distributed Memory Mechanism in Parallel Multiprocessor Motion Control System [J]. China Mechanical Engineering, 2014, 25(8): 1041-1046. |
| [10] | Song Xiaochun, Chen Yu, Xu Zhengwang, Wu Ying. Path Planning and Motion Control of an Automatic MFL Inspector for Tank Floors [J]. China Mechanical Engineering, 2014, 25(12): 1634-1638. |
| [11] | LIN Li-Meng-1, 2, XU Dong-2, 3, HU Yi-2, 3, QIN Cheng-Gang-1, 2, WANG Zhi-Cheng-2, 3, LIU Xiao-Hu-1, 2. Design of Realtime System for a Fieldbus-based Embedded Motion Controller [J]. China Mechanical Engineering, 2013, 24(4): 494-499. |
| [12] | WANG Feng-1, 2, LIN Hu-2, LIU Feng-1, 2, ZHENG Liao-Mo-2, ZHENG Yi-Lin-1, 2. A Detection Algorithm of Motion Mutation during 3D Cutter Compensation in#br# Five Axis End Milling with a Flat-bottomed Tool [J]. China Mechanical Engineering, 2013, 24(15): 1989-1995. |
| [13] | LI Gao-1, QI Guo-Ning-2, JI Yang-Jian-2, GU Xin-Jian-2. Service Oriented Product Modular Design Method and Its Prospects [J]. China Mechanical Engineering, 2013, 24(12): 1687-1695. |
| [14] |
DING Liang-Hong, WANG Run-Xiao, FENG Hua-Shan, LI Jun.
Brief Analysis of a BigDog Quadruped Robot
[J]. China Mechanical Engineering, 2012, 23(5): 505-514.
|
| [15] | LI Cheng, AI Wu, DUAN Chun, CHEN Guo-Pei, XIAO Yi. Research on Non-circular CNC Turning Technology Based on High Response Linear Motor [J]. China Mechanical Engineering, 2012, 23(23): 2869-2874. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||