

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (12): 2911-2919.DOI: 10.3969/j.issn.1004-132X.2025.12.013
Tao NI1,2,3( ), Yahui ZHAO1,2,3(), Zeren ZHAO1,2,3, Kaiqiang YANG1,2,3
), Yahui ZHAO1,2,3(), Zeren ZHAO1,2,3, Kaiqiang YANG1,2,3
Received:2025-01-03
Online:2025-12-25
Published:2025-12-31
Contact:
Yahui ZHAO
倪涛1,2,3(), 赵亚辉1,2,3(), 赵泽仁1,2,3, 杨凯强1,2,3
通讯作者:
赵亚辉
作者简介:倪涛,男,1978年生,教授、博士研究生导师。研究方向为移动机器人、环境感知。发表论文20余篇。E-mail:nitao@ysu.edu.cn。
基金资助:CLC Number:
Tao NI, Yahui ZHAO, Zeren ZHAO, Kaiqiang YANG. Dynamics Modeling and Base Dynamics Parameter Determination of 6-UPRU Parallel Manipulators[J]. China Mechanical Engineering, 2025, 36(12): 2911-2919.
倪涛, 赵亚辉, 赵泽仁, 杨凯强. 6-UPRU并联机器人动力学建模及基本动力学参数确定[J]. 中国机械工程, 2025, 36(12): 2911-2919.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.12.013
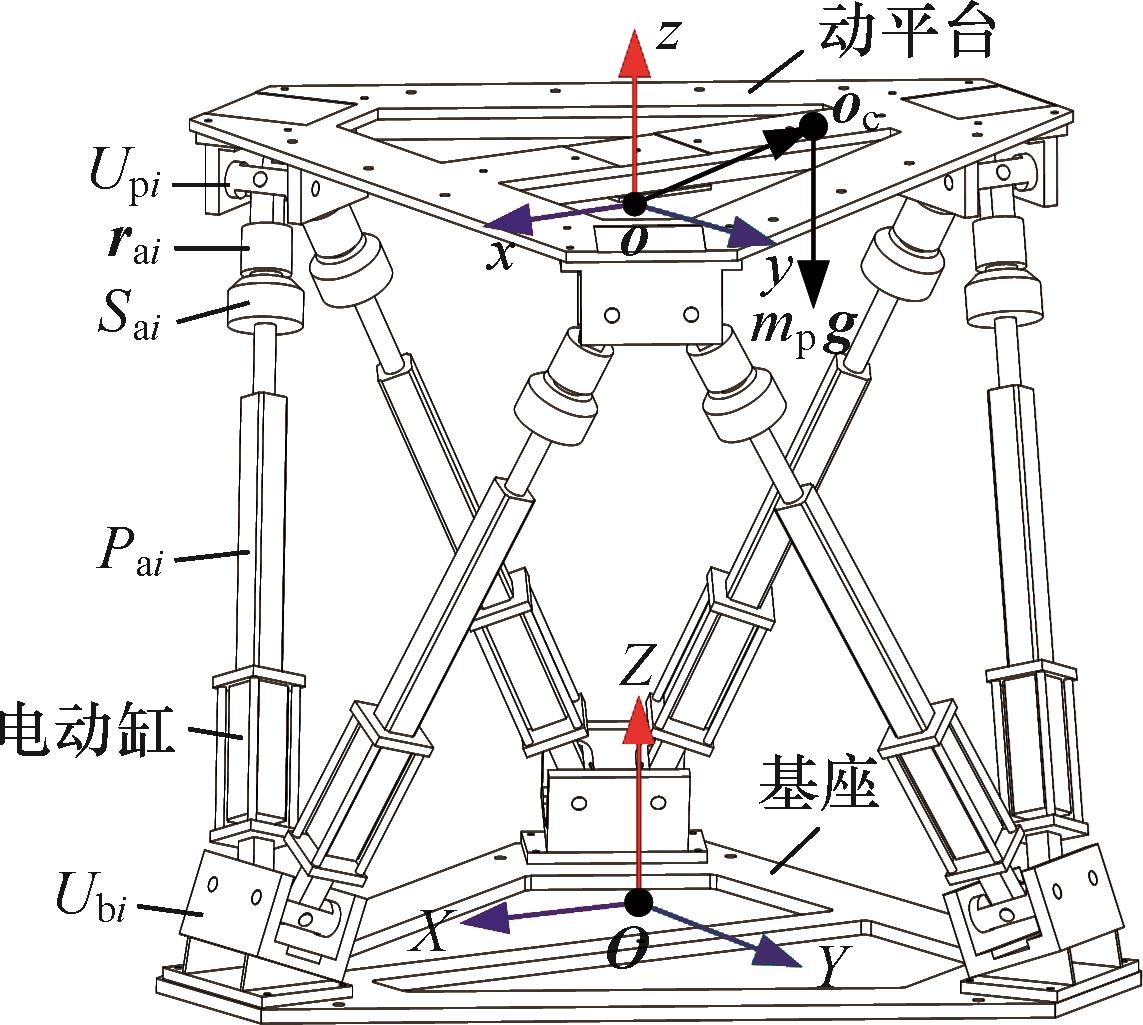
Fig.1 The CAD model of the 6-UPRU parallel manipulator
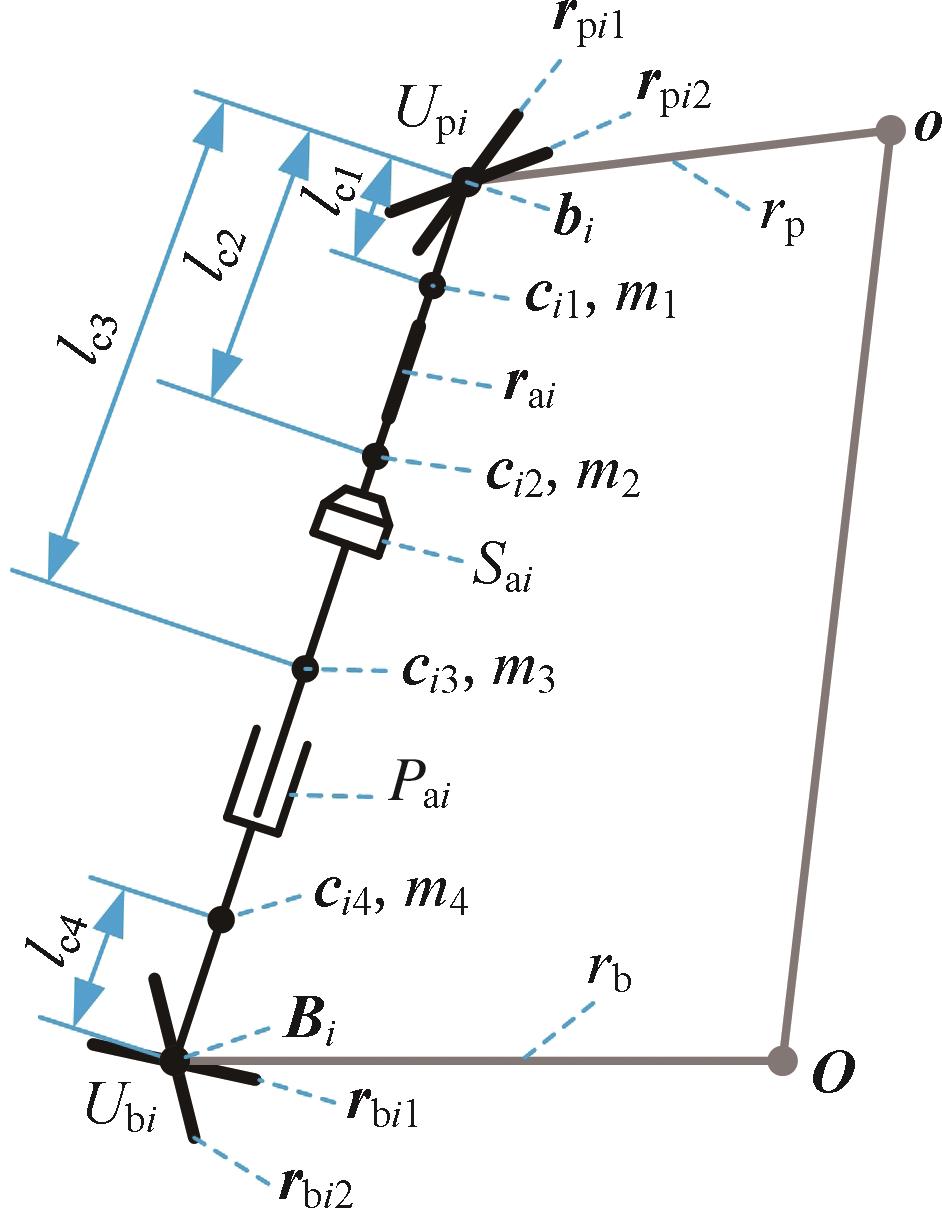
Fig. 2 The structure and parameters of the UPRU branch
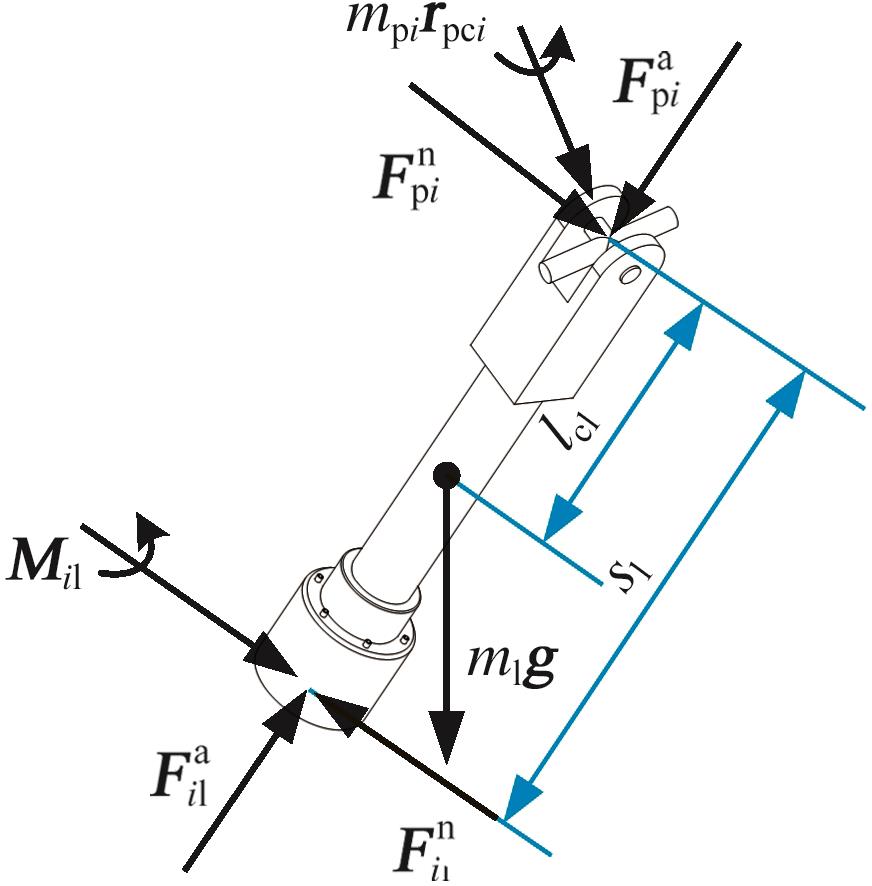
Fig.3 The force analysis of the link Li1
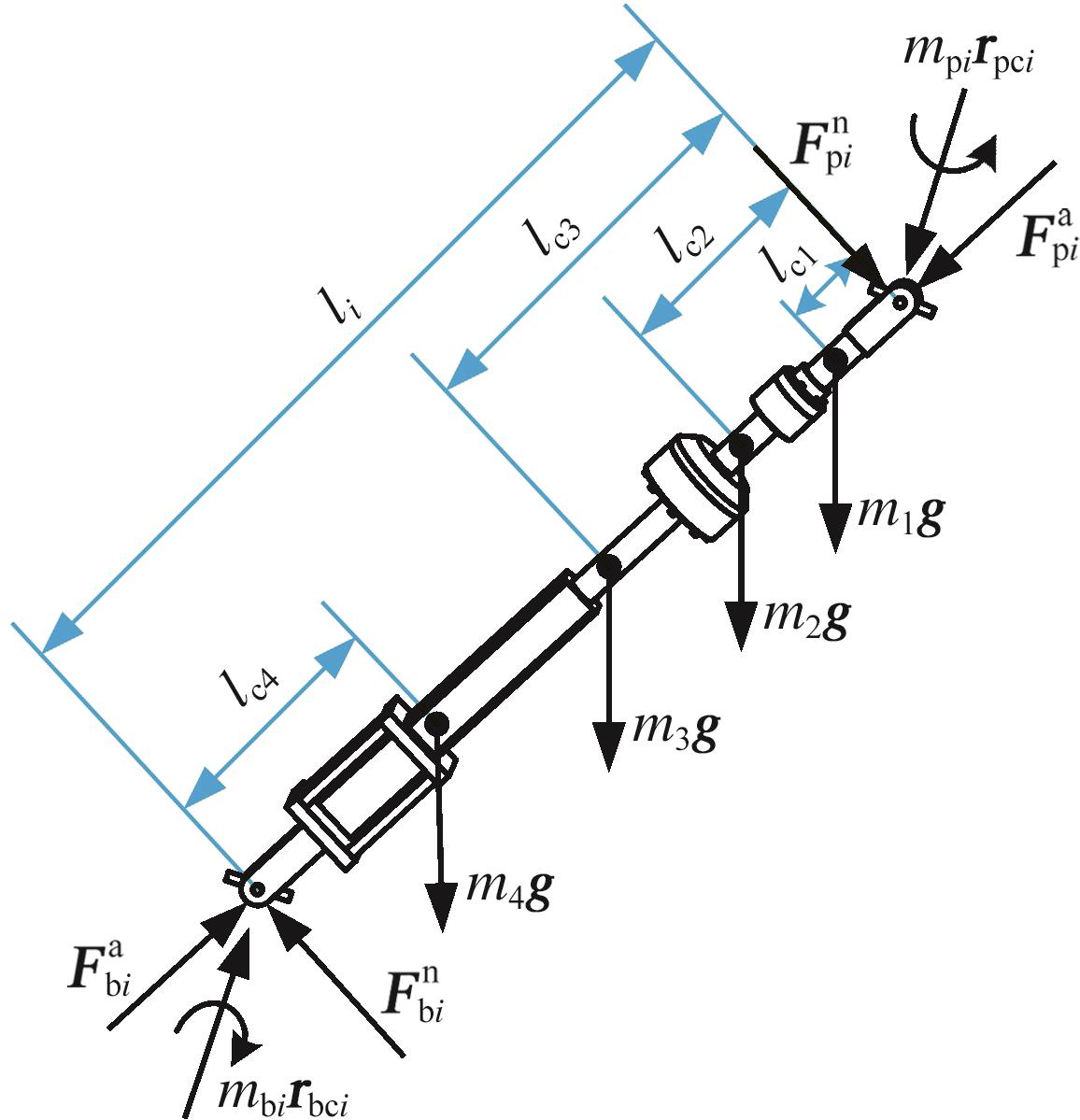
Fig.4 The force analysis of the entire branch
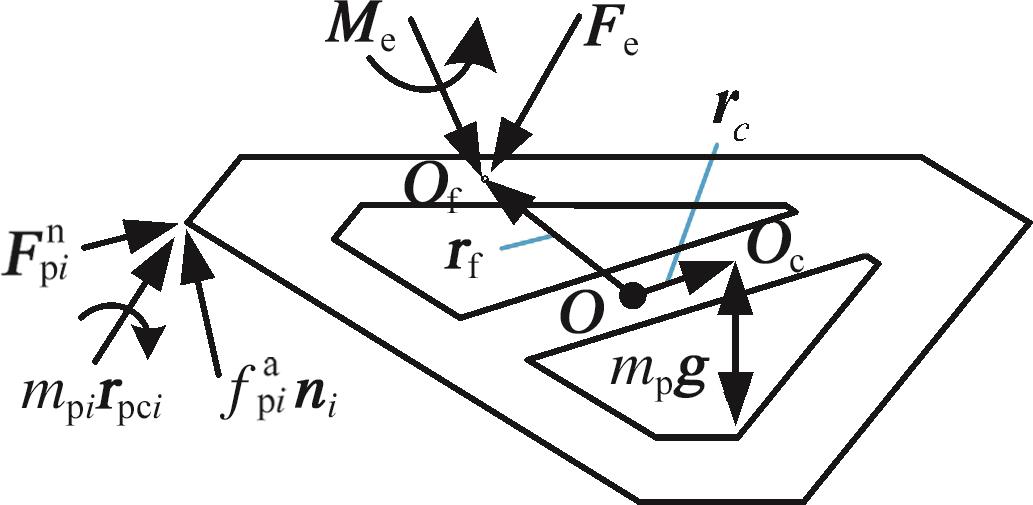
Fig.5 The force analysis of moving platform
| 编号 | 动力学参数 | 编号 | 动力学参数 |
|---|---|---|---|
| 1 | 10 | ||
| 2 | 11 | ||
| 3 | 12 | ||
| 4 | 13 | ||
| 5 | 14 | ||
| 6 | 15 | ||
| 7 | 16 | ||
| 8 | 17 | ||
| 9 |
Tab.1 Dynamic parameters
| 编号 | 动力学参数 | 编号 | 动力学参数 |
|---|---|---|---|
| 1 | 10 | ||
| 2 | 11 | ||
| 3 | 12 | ||
| 4 | 13 | ||
| 5 | 14 | ||
| 6 | 15 | ||
| 7 | 16 | ||
| 8 | 17 | ||
| 9 |
| 符号 | 表达式 |
|---|---|
Tab.2 The expression corresponding to the symbol ψik
| 符号 | 表达式 |
|---|---|
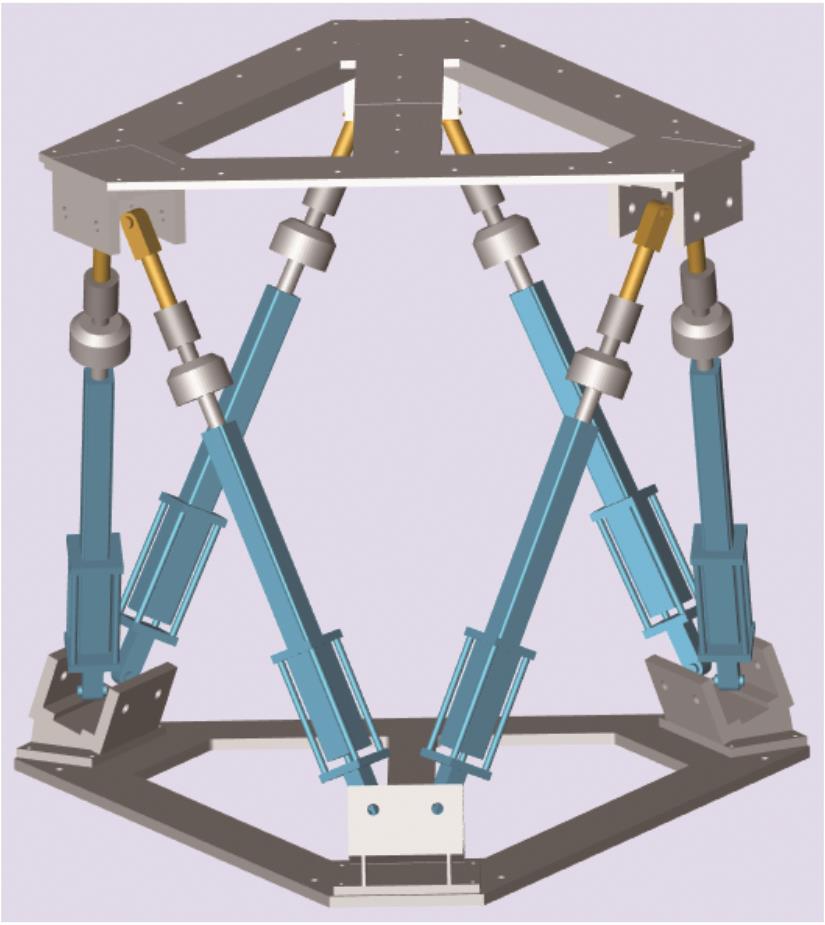
Fig.6 6-UPRU parallel manipulator SimMechanics simulation model
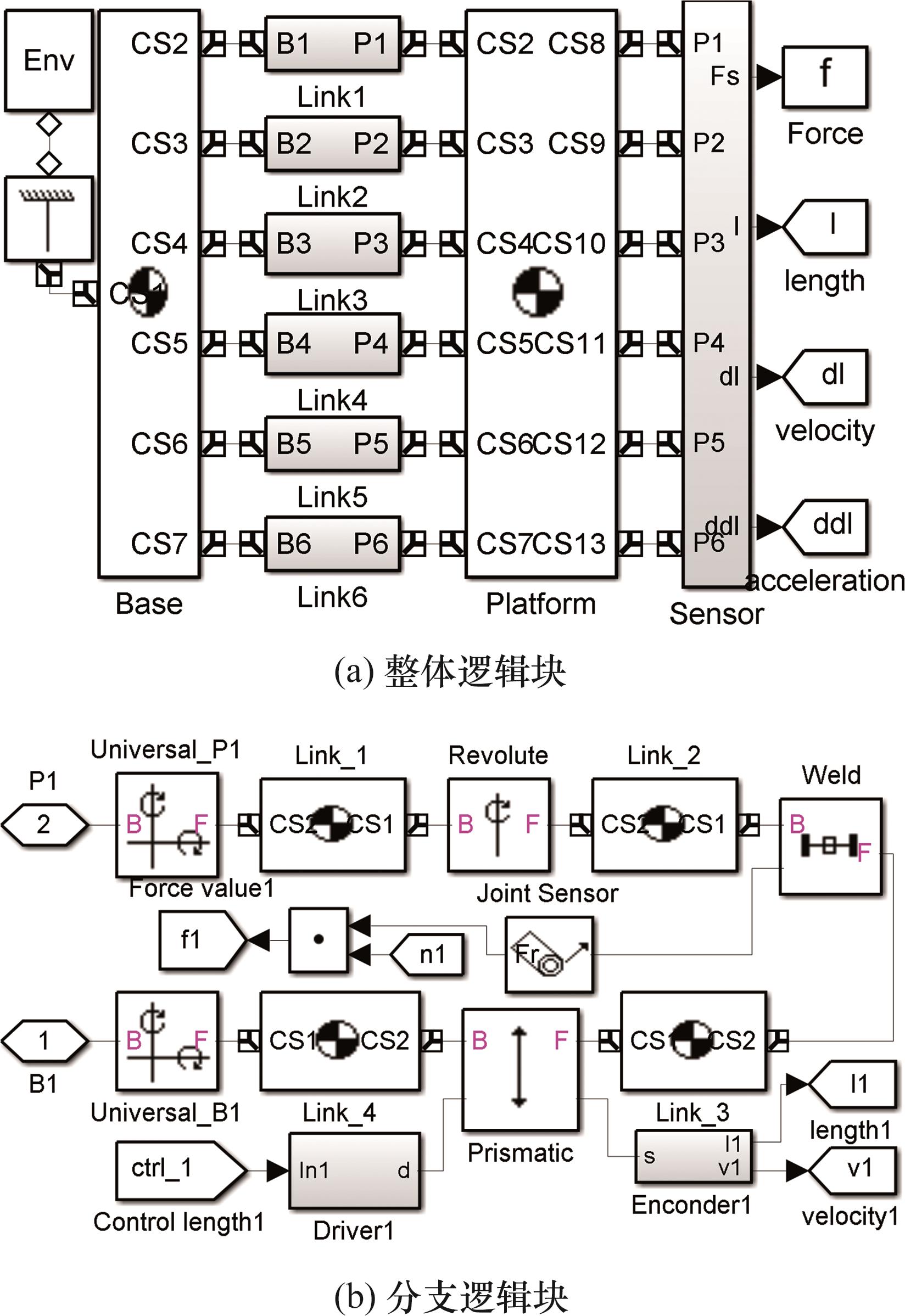
Fig.7 6-UPRU parallel manipulator SimMechanics model logic blocks
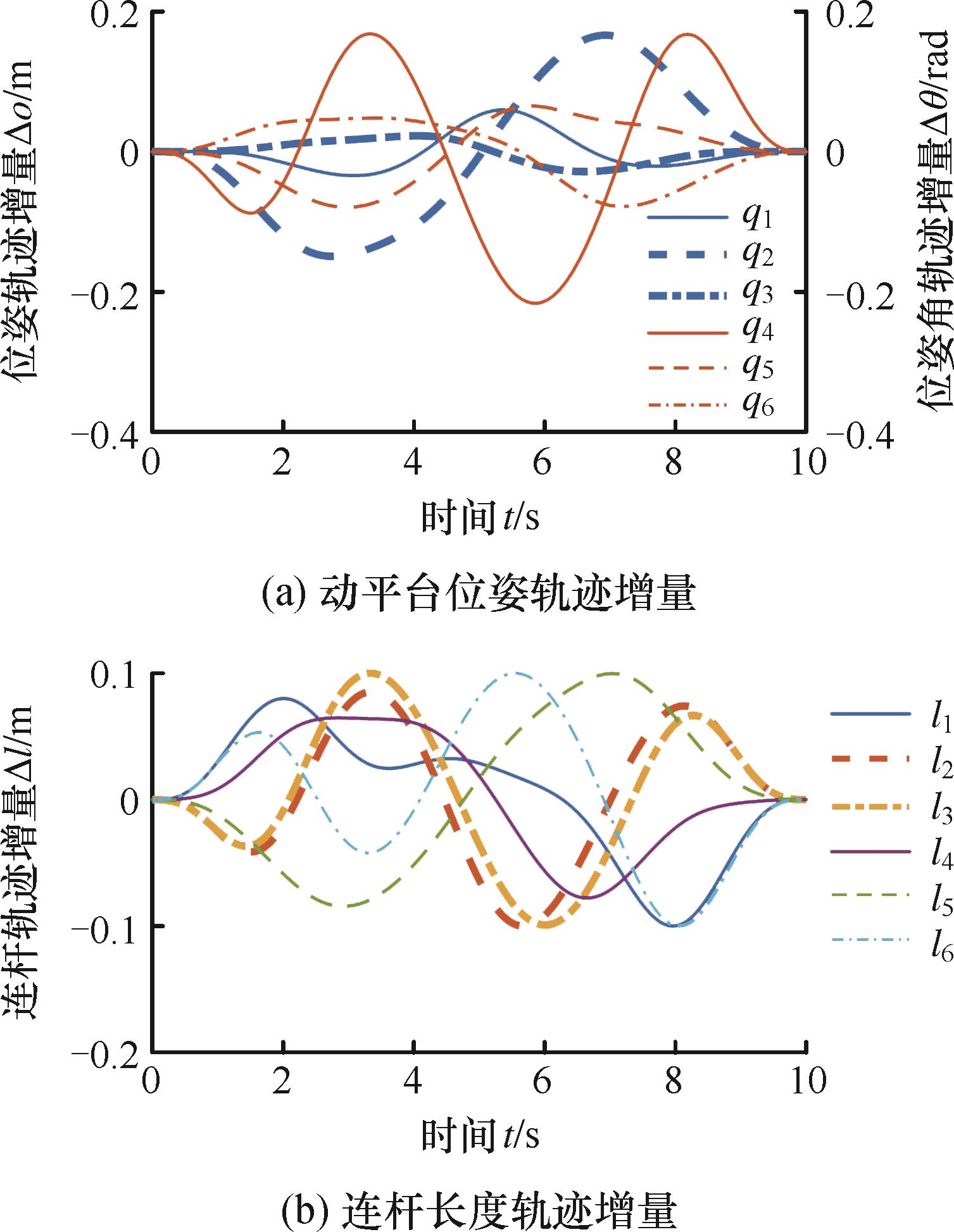
Fig.8 The manipulator excitation trajectory increment
编 号 | 基本动力学参数 | 编 号 | 基本动力学参数 |
|---|---|---|---|
| 1 | 10 | ||
| 2 | 11 | ||
| 3 | 12 | ||
| 4 | 13 | ||
| 5 | 14 | ||
| 6 | 15 | ||
| 7 | 16 | ||
| 8 | 17 | ||
| 9 |
Tab.3 Base dynamic parameters
编 号 | 基本动力学参数 | 编 号 | 基本动力学参数 |
|---|---|---|---|
| 1 | 10 | ||
| 2 | 11 | ||
| 3 | 12 | ||
| 4 | 13 | ||
| 5 | 14 | ||
| 6 | 15 | ||
| 7 | 16 | ||
| 8 | 17 | ||
| 9 |
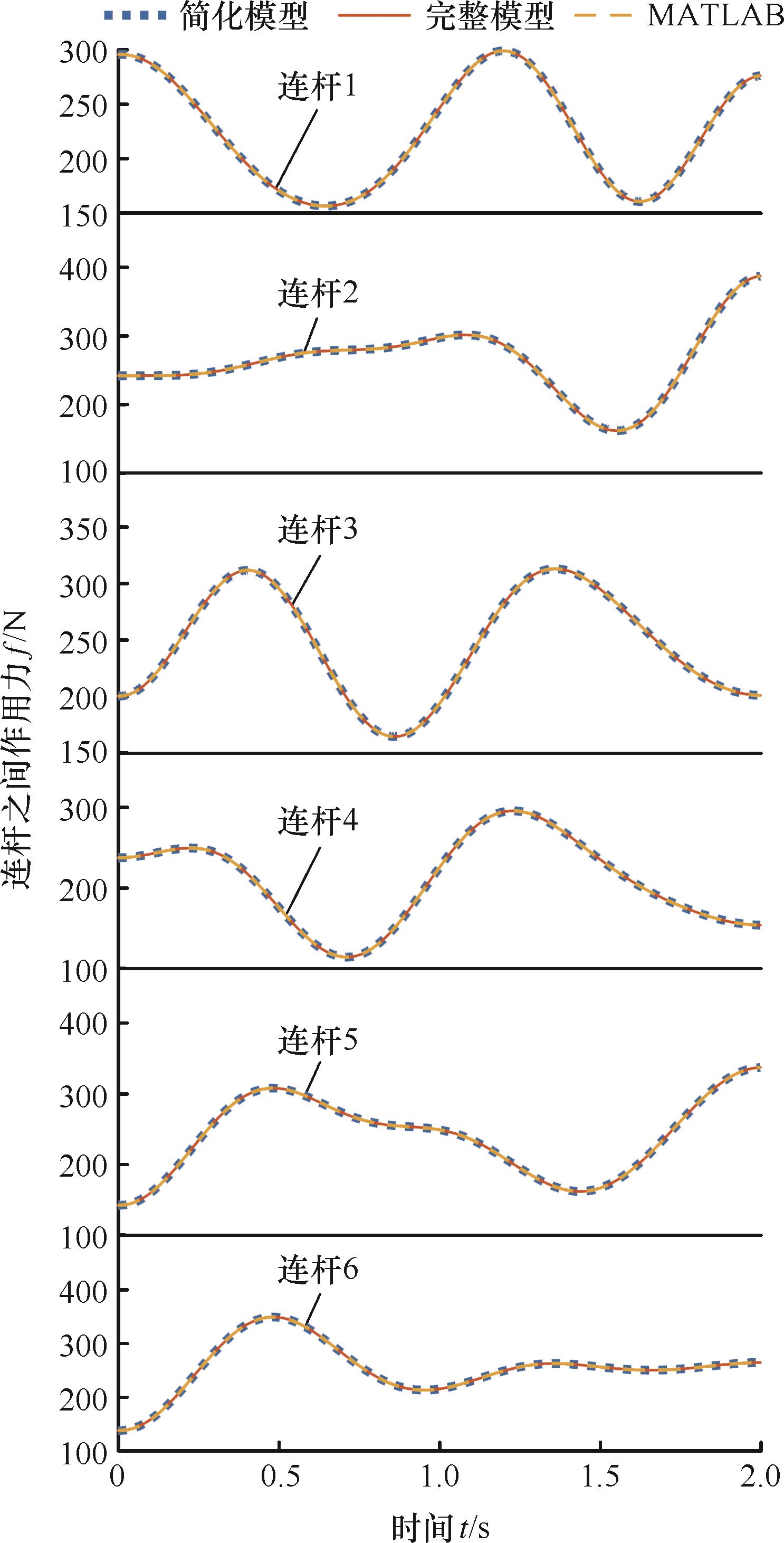
Fig.9 Comparison between measured values and theoretical analytical values in the SimMechanics model
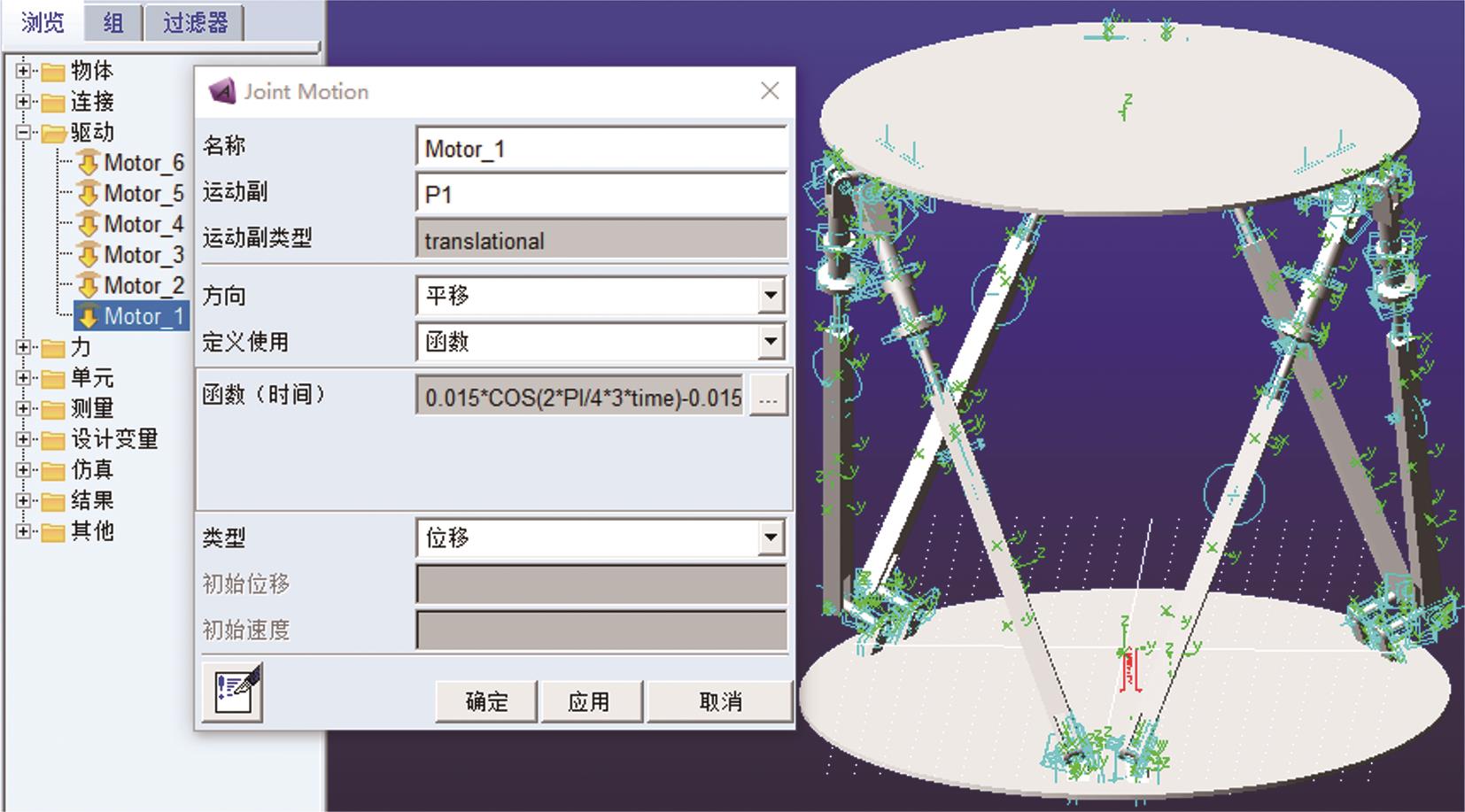
Fig.10 6-UPRU parallel manipulator ADAMS simulation model
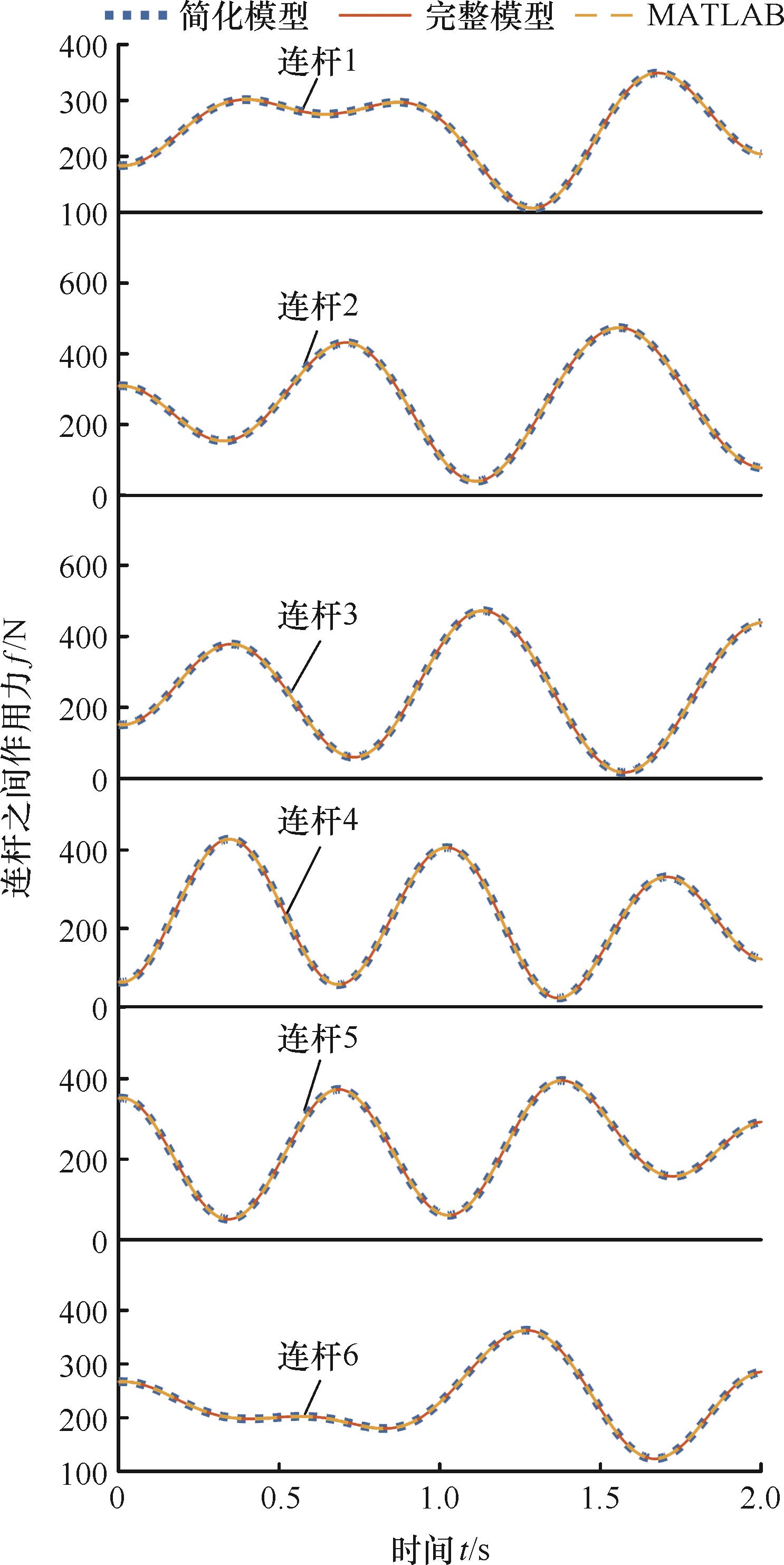
Fig.11 Comparison between measured values and theoretical analytical values in the ADAMS model
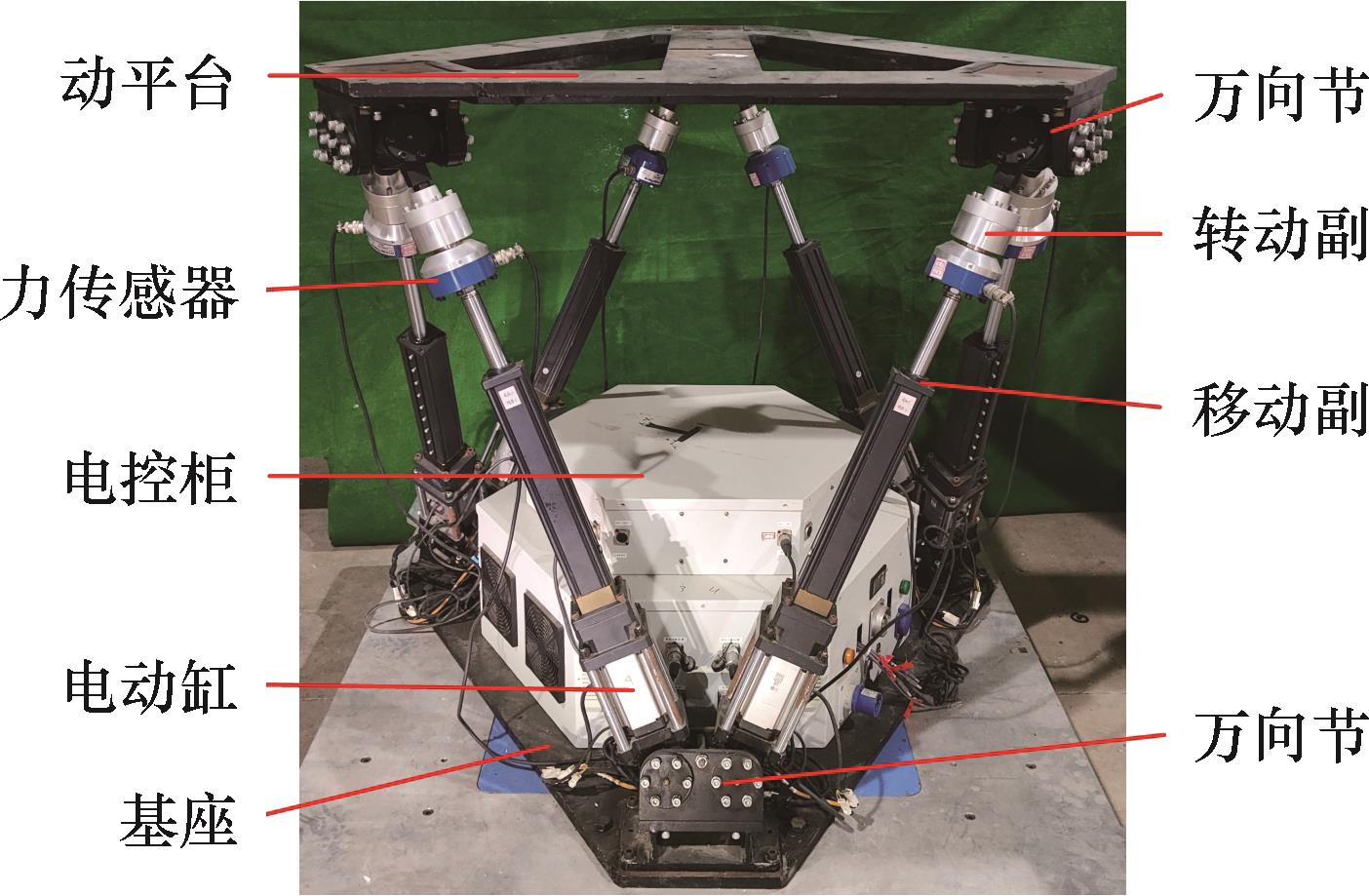
Fig.12 6-UPRU parallel manipulator prototype
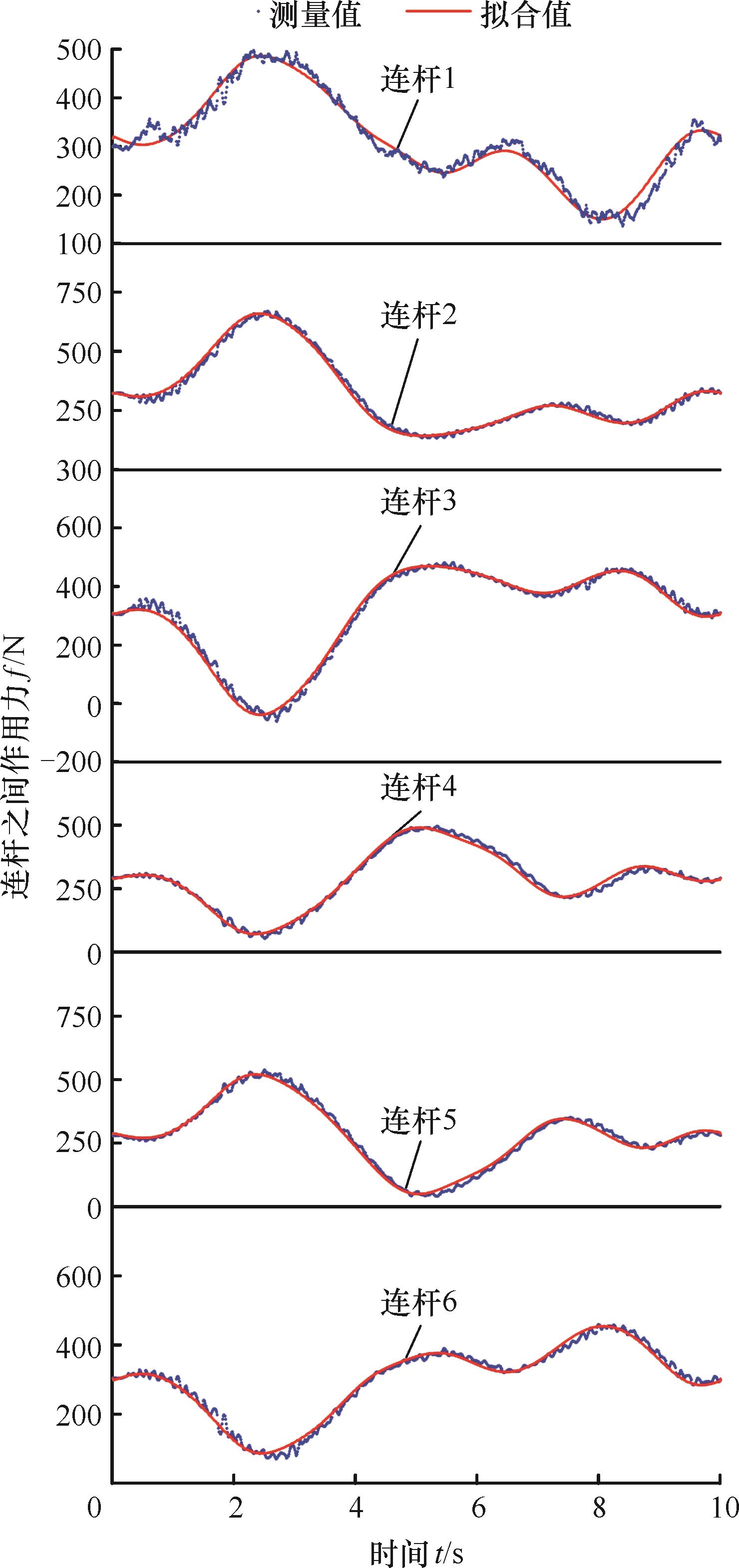
Fig.13 Comparison between force sensor measurement and fitted values
| [1] | XIN Guiyang, DENG Hua, ZHONG Guoliang. Closed-form Dynamics of a 3-DOF Spatial Parallel Manipulator by Combining the Lagrangian Formulation with the Virtual Work Principle[J]. Nonlinear Dynamics, 2016,86:1329-1347. |
| [2] | ZHOU Zhou, GOSSELIN C. Simplified Inverse Dynamic Models of Parallel Robots Based on a Lagrangian Approach[J]. Meccanica, 2024,59(4):657-680. |
| [3] | KLEIN D, GAMARRA D F T. Dynamic Modeling Using the Principle of Virtual Work and Decentralized PD Control of a Stewart-gough Platform[C]∥2022 Latin American Robotics Symposium (LARS), 2022 Brazilian Symposium on Robotics (SBR), and 2022 Workshop on Robotics in Education (WRE).2022:1-6. |
| [4] | CHEN Zhengsheng, XU Lingming, ZHANG Weizhong, et al. Closed-form Dynamic Modeling and Performance Analysis of an Over-constrained 2PUR-PSR Parallel Manipulator with Parasitic Motions[J]. Nonlinear Dynamics, 2019,96:517-534. |
| [5] | ZHANG Guoxing, HE Jianliang, GUO Jinwei, et al. Dynamic Modeling and Vibration Characteristics Analysis of Parallel Antenna[J]. Mechanical Sciences, 2022,13(2):1019-1029. |
| [6] | YANG Songlin, YANG Haibo, ZHANG Xiang, et al. Design of Active Vibration Isolation System for Satellite Optical Load Based on Stewart Platform[C]∥Journal of Physics:Conference Series. IOP Publishing, 2024,2746(1):012008. |
| [7] | KHANBABAYI E, NOORANI M R S. Design Computed Torque Control for Stewart Platform with Uncertainty to the Rehabilitation of Patients with Leg Disabilities[J]. Computer Methods in Biomechanics and Biomedical Engineering, 2024,27(8):1028-1041. |
| [8] | MAYEDA H, YOSHIDA K, OSUKA K. Base Parameters of Manipulator Dynamic Models[C]∥Proceedings. 1988 IEEE International Conference on Robotics and Automation. IEEE, 1988:1367-1372. |
| [9] | TAN Chao, ZHAO Huan, DING Han. Identification of Dynamic Parameters of Closed-chain Industrial Robots Considering Motor Couplings [J]. Computers and Electrical Engineering, 2022,99:107740. |
| [10] | GAUTIER M. Numerical Calculation of the Base Inertial Parameters of Robots[J]. Journal of Robotic Systems, 1991,8(4):485-506. |
| [11] | YANG Chenguang, JIANG Yiming, HE Wei, et al. Adaptive Parameter Estimation and Control Design for Robot Manipulators with Finite-time Convergence[J]. IEEE Transactions on Industrial Electronics, 2018,65(10):8112-8123. |
| [12] | TADESE M, PICO N, SEO S, et al. A Two-step Method for Dynamic Parameter Identification of Indy7 Collaborative Robot Manipulator[J]. Sensors, 2022,22(24):9708. |
| [13] | HARIB K, SRINIVASAN K. Kinematic and Dynamic Analysis of Stewart Platform-based Machine Tool Structures[J]. Robotica, 2003,21(5):541-554. |
| [14] | 郭菲, 李永泉, 李玉昆, 等. 电液驱动3-UPS/S并联稳定平台的动力学参数辨识[J]. 中国机械工程, 2016,27(21):2862-2868. |
| GUO Fei, LI Yongquan, LI Yukun, et al. Identification of Dynamics Parameters for an Electro-Hydraulic 3-UPS/S Parallel Stabilized Platform[J]. China Mechanical Engineering, 2016,27(21):2862-2868. | |
| [15] | DANAEI B, ARIAN A, TALE Masouleh M, et al. Dynamic Modeling and Base Inertial Parameters Determination of a 2-DOF Spherical Parallel Mechanism[J]. Multibody System Dynamics, 2017, 41:367-390. |
| [1] | HAN Yali, ZHU Xiaojun, ZHU Wenliang, SHENG Shiqiang, WU Yingda. Development and Characteristic Analysis of Multi-mode Elastic Actuators [J]. China Mechanical Engineering, 2024, 35(12): 2221-2230,2238. |
| [2] | LIANG Zhiqiang, SHI Guihong, DU Yuchao, YE Yuling, JI Yongjian, CHEN Sichen, QIU Tianyang, LIU Zhibing, ZHOU Tianfeng, WANG Xibin. Research on Tool Tip Frequency Response Prediction of Robot Milling Systems Considering Characteristics of Spindle-toolholder Interface [J]. China Mechanical Engineering, 2023, 34(01): 2-9. |
| [3] | XIE Zhijiang, CHENG Qing, DING Jun, HE Miao, FAN Naiji, WU Xiaoyong. Dimensional Design and Performance Analysis of a 6-DOF Parallel Manipulator with Two Limbs [J]. China Mechanical Engineering, 2022, 33(14): 1680-1690. |
| [4] | WANG Longkai, WANG Ailun, YIN Yijun, JIN Miao, HENG Xing. Dynamics Modeling Method of Complex Rotors for Aero-turboshaft Engines [J]. China Mechanical Engineering, 2022, 33(13): 1513-1520. |
| [5] | SUN Chiyu, SHEN Huiping, YUAN Juntang, YANG Tingli. Kinematics of a Novel Three-translation and One-rotation(3T1R) Semi-symmetry Parallel Manipulator [J]. China Mechanical Engineering, 2021, 32(06): 638-647. |
| [6] | KONG Juncheng;LI Ju;SHEN Huiping. Error Analysis and Compensation for Clearances among Kinematic Pairs of 2-RPaRSS Parallel Manipulators [J]. China Mechanical Engineering, 2020, 31(06): 706-713. |
| [7] | QIN Jiwei1,2,3;CHANG Yong1,2;YUAN Bingbing1,2,3;FU Xingwei4;WANG Tianlong1,2. Dynamics Modeling and Analysis of a Rolling Sealed Wall-climbing Robot [J]. China Mechanical Engineering, 2019, 30(24): 2978-2985. |
| [8] | CHANG Boyan1,2;LI Wenqi1;JIN Guoguang1,2;SONG Yanyan1. Accurate Straight-line Deployable Mechanism and Its Dynamics Analysis [J]. China Mechanical Engineering, 2018, 29(11): 1303-1309,1315. |
| [9] | SHEN Huiping;SHAO Guowei;DENG Jiaming;MENG Qingmei;YANG Tingli. A Novel Not-fully Symmetrical 3T1R PM with Low Coupling-degrees and Its Kinematics [J]. China Mechanical Engineering, 2017, 28(19): 2289-2299. |
| [10] | Gu Yongxia, Zhang Yuling, Zhao Jieliang, Yan Shaoze. Advances in Researches of Dynamics Problems for Free-floating Manipulator [J]. China Mechanical Engineering, 2016, 27(15): 2118-2129. |
| [11] | Gu Yongxia, Zhang Yuling, Zhao Jieliang, Yan Shaoze. Advances on Dynamics Modeling and Experimental Studies for Flexible Manipulators [J]. China Mechanical Engineering, 2016, 27(12): 1694-1703. |
| [12] | Peng Chunjiang, Hu Yanping, Cheng Junsheng, Shen Yiping. Modeling and Analyses of Rigid-flexible Coupled Structural Dynamics for Offshore Floating Wind Turbines [J]. China Mechanical Engineering, 2016, 27(04): 461-468. |
| [13] | . High Effective Inverse Dynamics Modelling for Multi-DOF Serial Robots [J]. China Mechanical Engineering, 2016, 27(01): 20-24. |
| [14] | Hu Bo, Song Chunxiao, Zhang Qingling, Yu Jingjing, . Jacobian Matrix Establishment of 2(2-UPR+SPR) Serial-parallel Manipulator [J]. China Mechanical Engineering, 2015, 26(7): 853-858. |
| [15] | Qin Li , Liu Fucai, Liang Lihuan, Jin Zhenlin. Hybrid Humanoid Space Mechanical Arm Trajectory Tracking Control Based on Sliding Mode [J]. China Mechanical Engineering, 2015, 26(4): 435-441. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||