ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (3): 564-570.DOI: 10.3969/j.issn.1004-132X.2026.03.006
Previous Articles Next Articles
XIE Yuhang1( ), HANG Lubin1(), KANG Kaidong1, HUANG Xiaobo1, CHI Yonglin2
), HANG Lubin1(), KANG Kaidong1, HUANG Xiaobo1, CHI Yonglin2
Received:2025-03-18
Online:2026-03-25
Published:2026-04-08
Contact:
HANG Lubin
谢宇航1(), 杭鲁滨1(), 康开东1, 黄晓波1, 迟永琳2
通讯作者:
杭鲁滨
作者简介:谢宇航,1998年生,硕士研究生。研究方向为机器人机构学。E-mail:18962398785@163.com基金资助:CLC Number:
XIE Yuhang, HANG Lubin, KANG Kaidong, HUANG Xiaobo, CHI Yonglin. Research on Judgment Methods for Multi-mode Mechanism Shakiness to Avoid Local Degrees of Freedom Solution[J]. China Mechanical Engineering, 2026, 37(3): 564-570.
谢宇航, 杭鲁滨, 康开东, 黄晓波, 迟永琳. 避免局部自由度求解的多模式机构抖动判定方法研究[J]. 中国机械工程, 2026, 37(3): 564-570.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.03.006
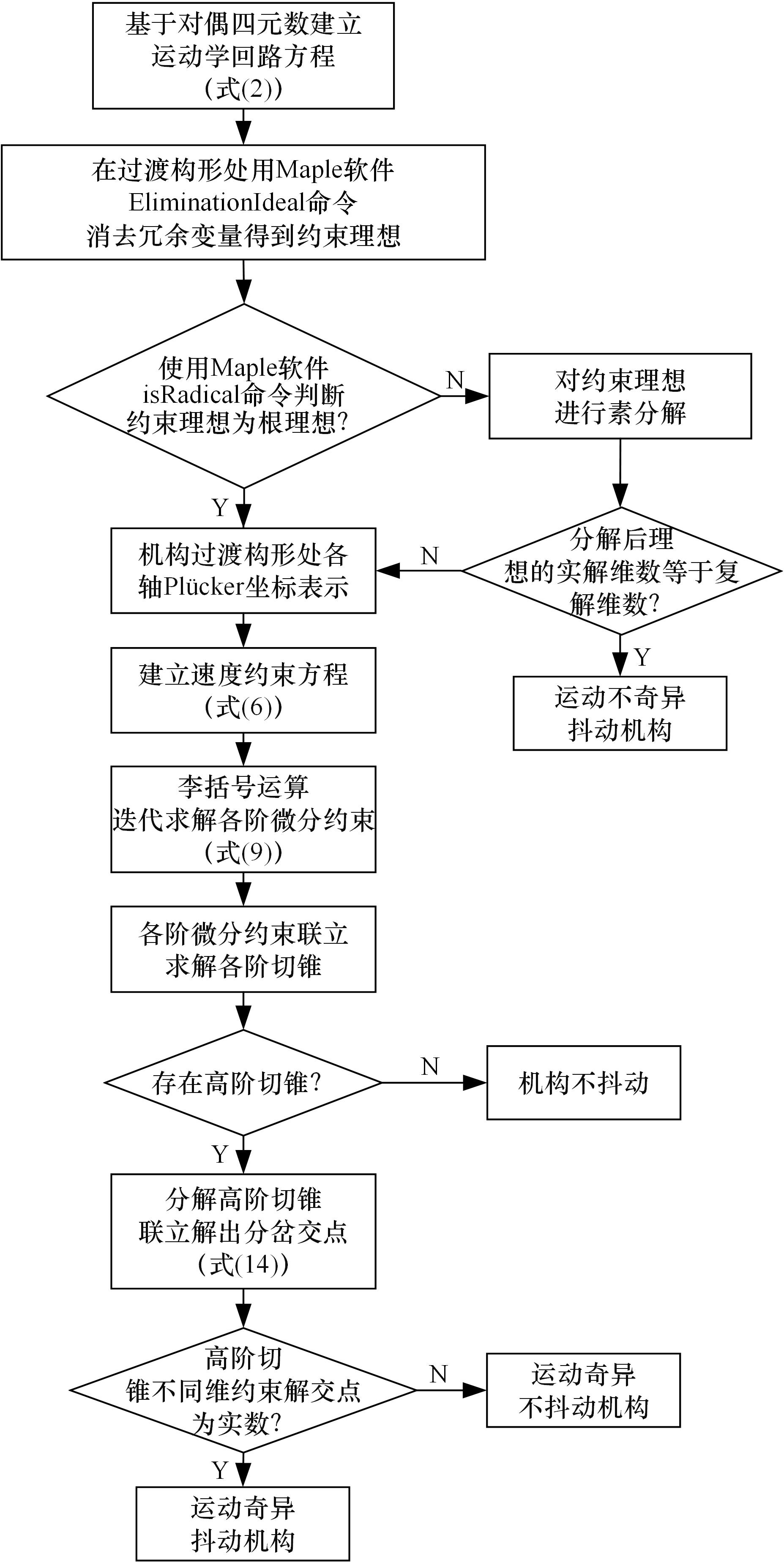
Fig.1 Flow chart of mechanism shakiness judgment method

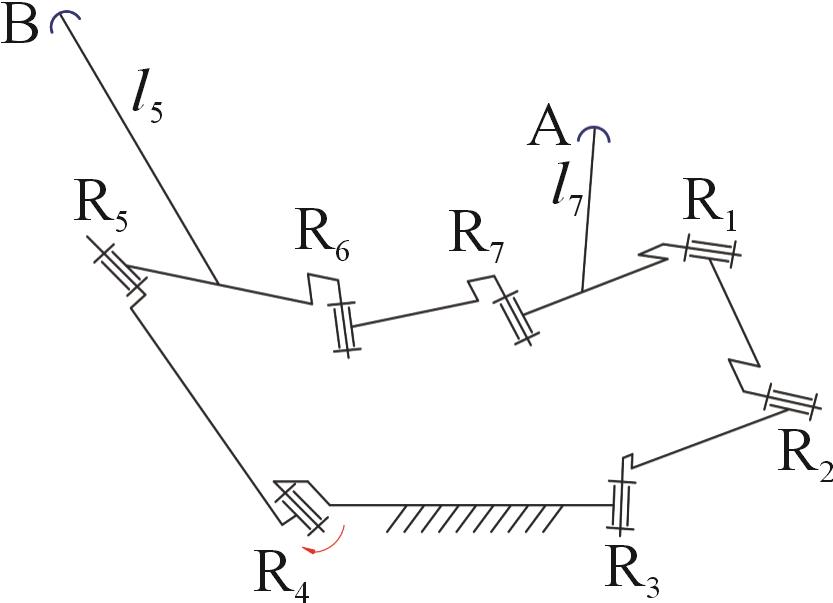
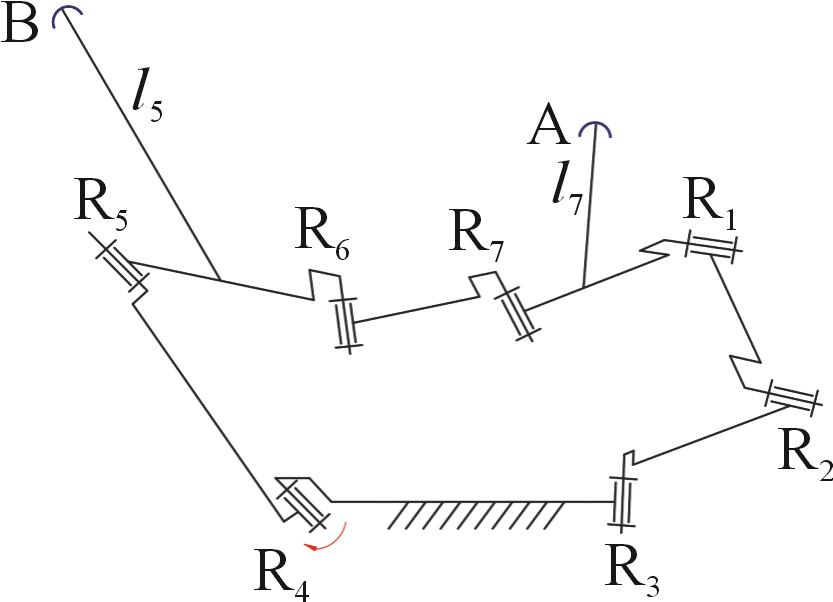
Fig.2 Joint position of multi-mode 7R mechanism
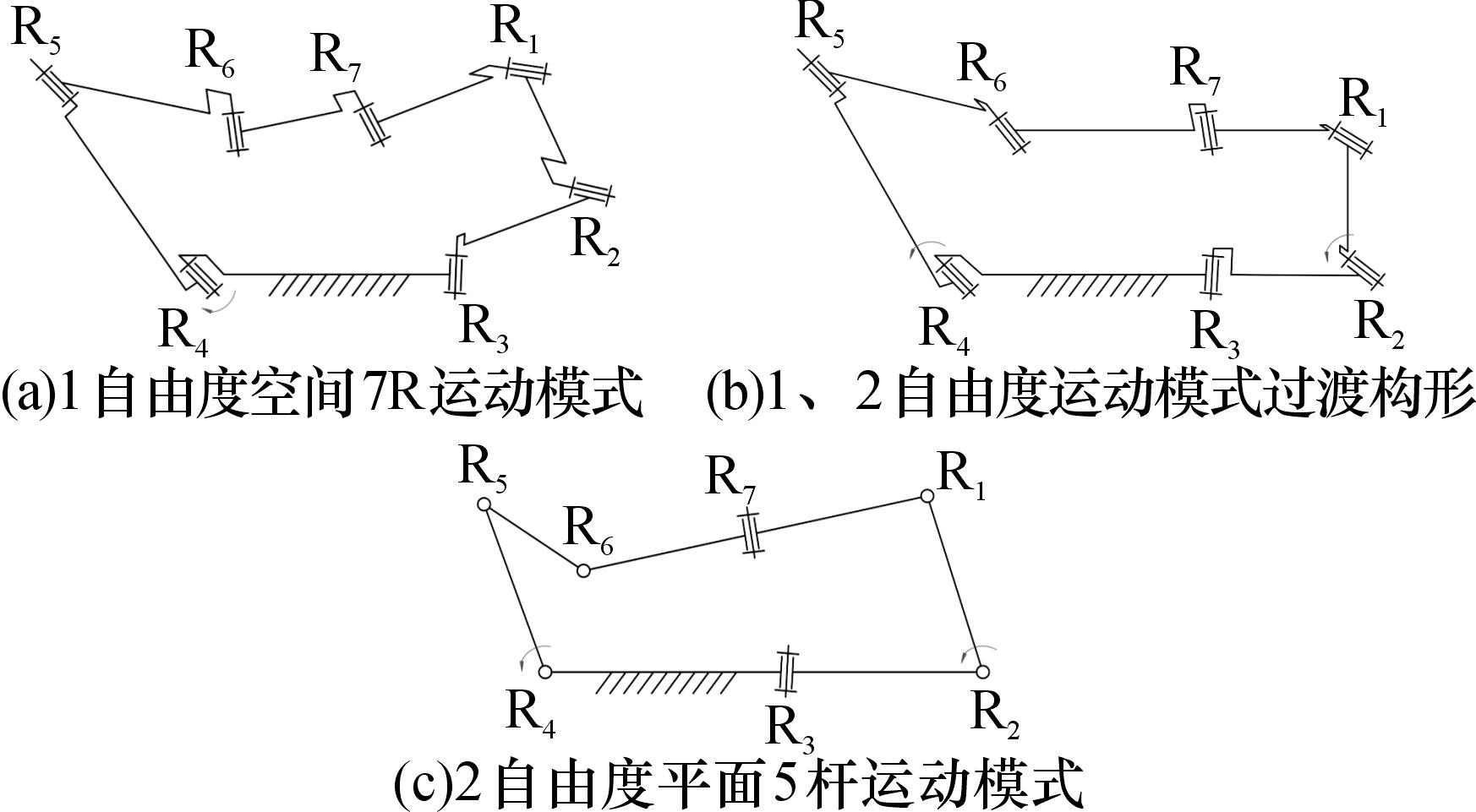
Fig.3 Motion mode and transition configuration of single-loop 7R mechanism
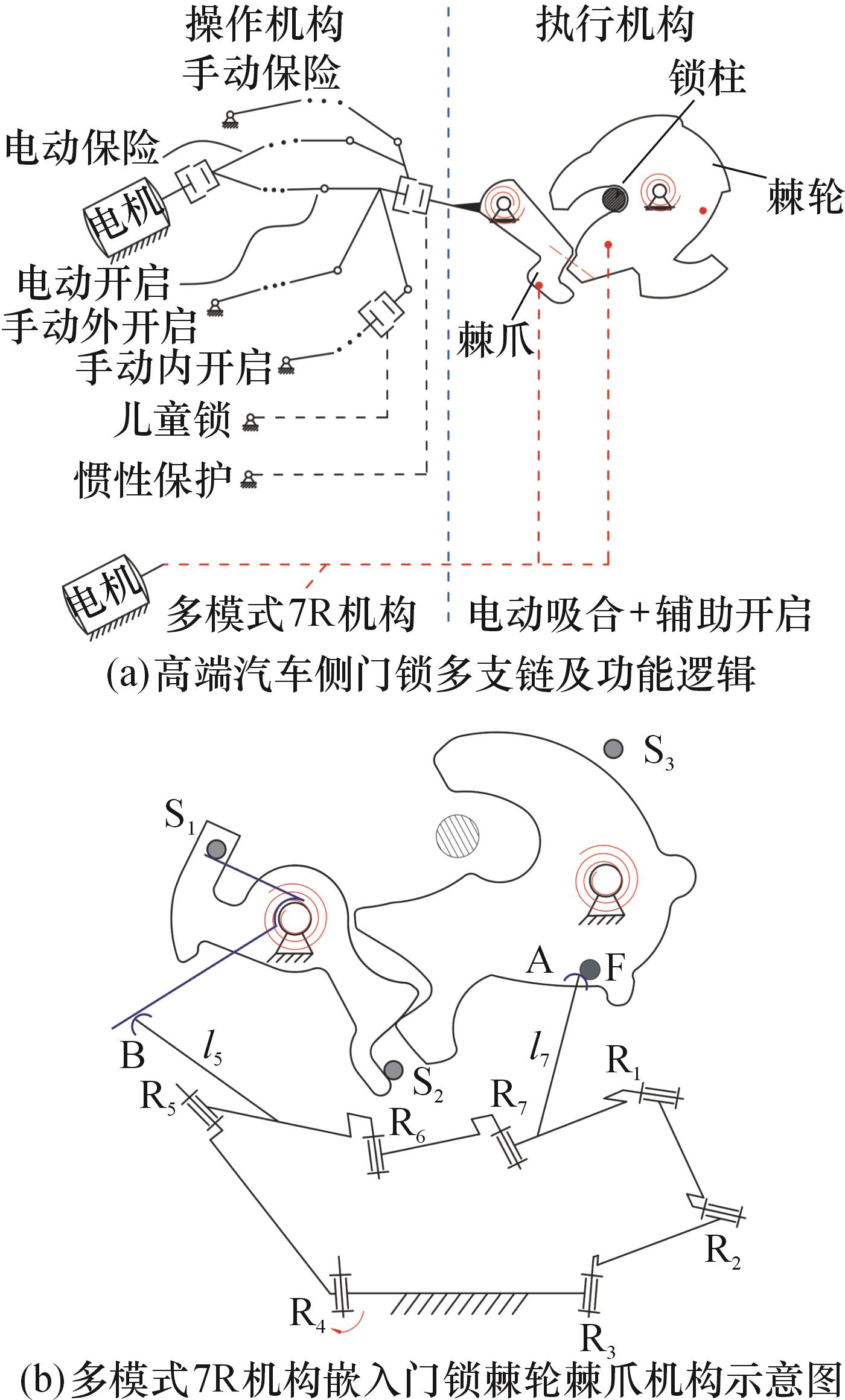
Fig.4 Multi-branch chain and multi-mode 7R mechanism embedded ratchet pawl
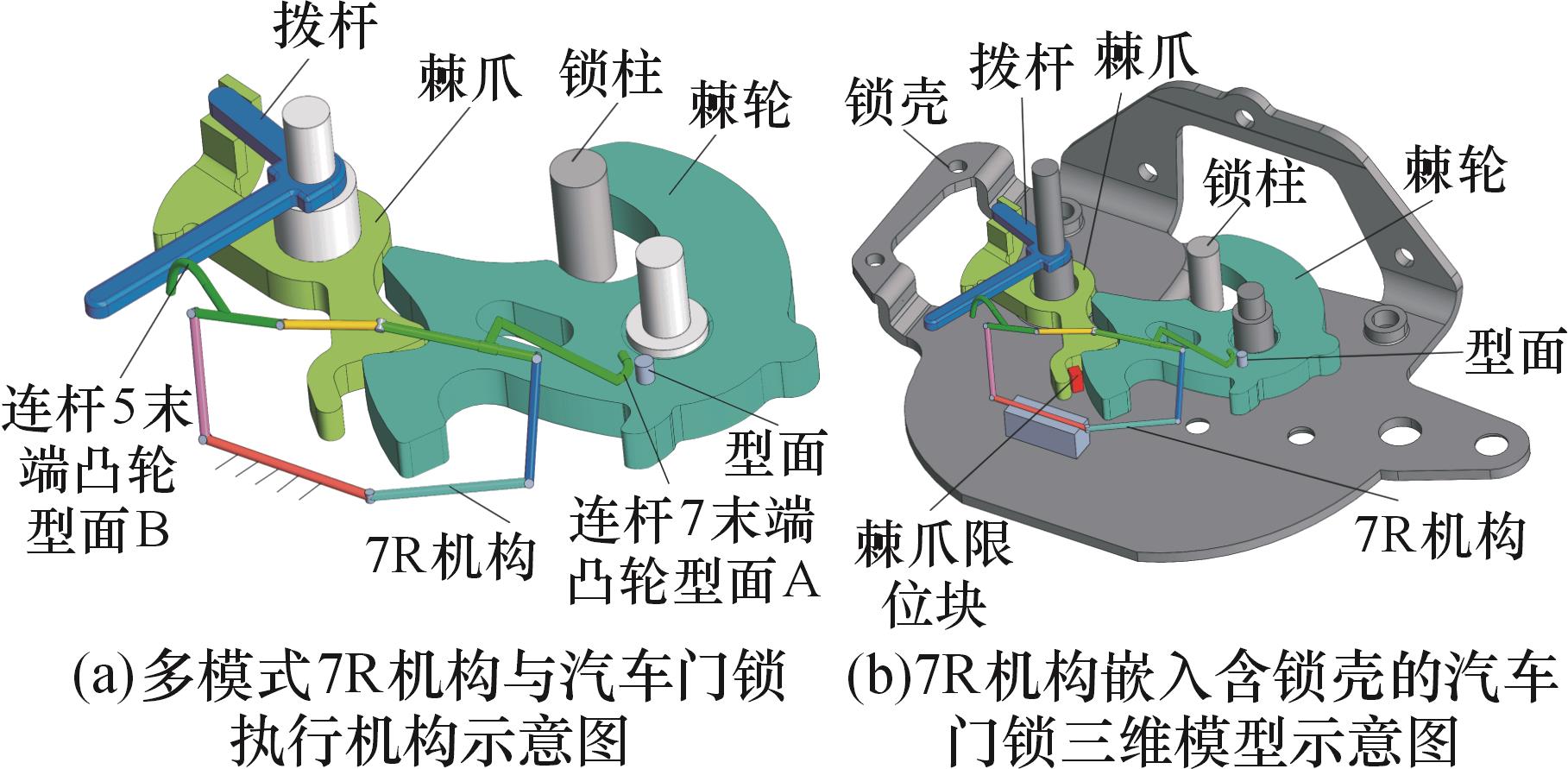
Fig.5 Layout diagram of 7R mechanism and ratchet pawl actuator in multi-function vehicle latch
运动 工况 | 7R机构运动模式、自由度 | 功能实现及 机构运动过程 | 考虑汽车门锁棘轮棘爪的机构方案示意图 |
|---|---|---|---|
电动 吸合 |
运动模式:空间7R运动模式; 驱动关节:关节R4顺时针运动; 机构自由度数目:1。 | 驱动关节R4顺时针转动,带动电动吸合执行杆l7运动,使吸合连杆末端凸轮型面A拨动半锁状态的棘轮型面F逆时针转动,如左图所示;棘轮拨动棘爪顺时针转动运动至全锁位置,如右图所示。 | 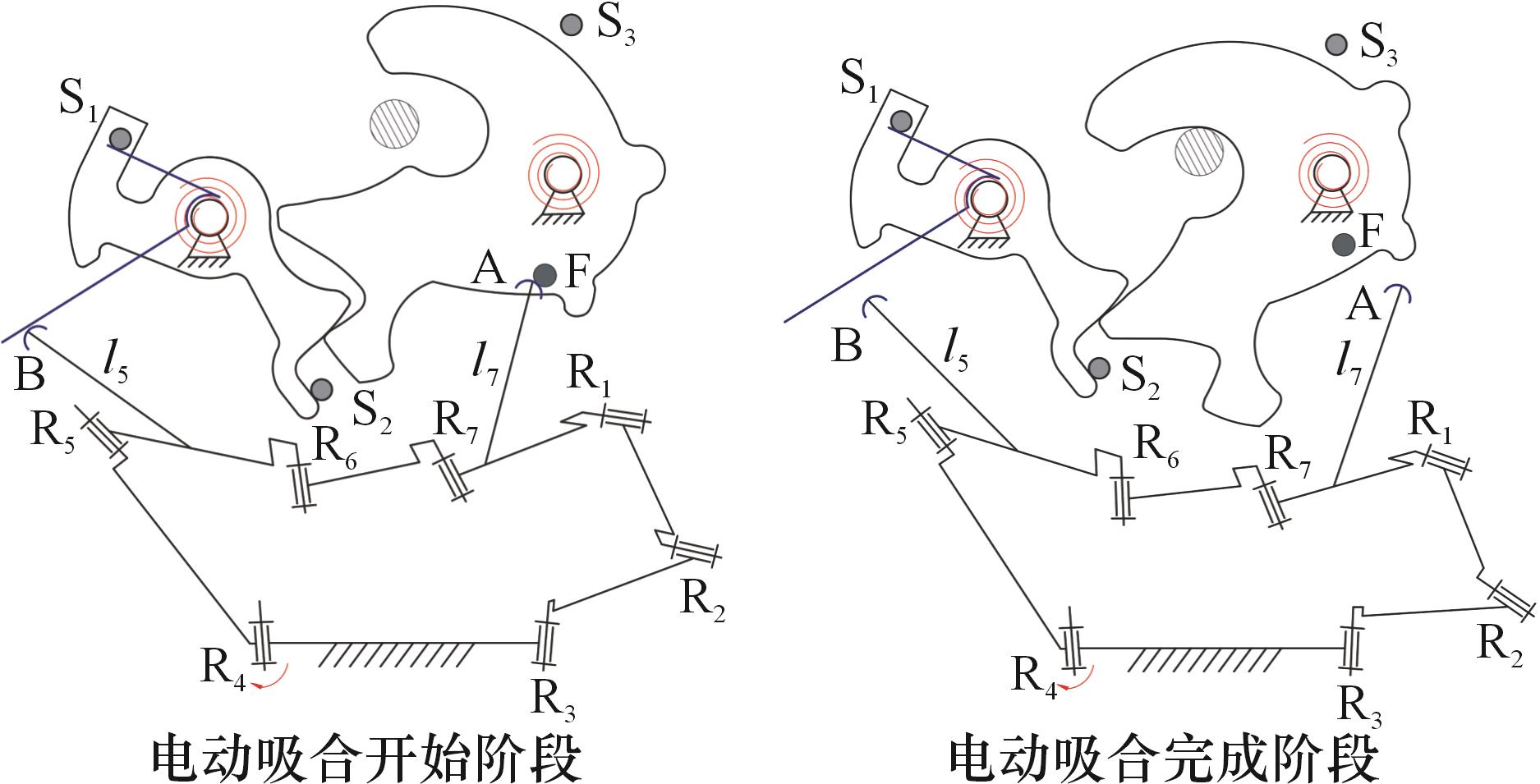 |
异物 夹持 |
运动模式:空间7R运动模式; 驱动关节:关节R4驱动切换关节R2驱动; 机构自由度数目:1。 | 电动吸合过程遇到夹持异物的情况,感知夹持异物,控制系统停止关节R4电机驱动,切换到关节R2驱动吸合执行杆末端凸轮型面A与棘轮F型面脱离,实现停止吸合过程,棘轮回到半锁状态,继续驱动R2直到过渡构形。 | 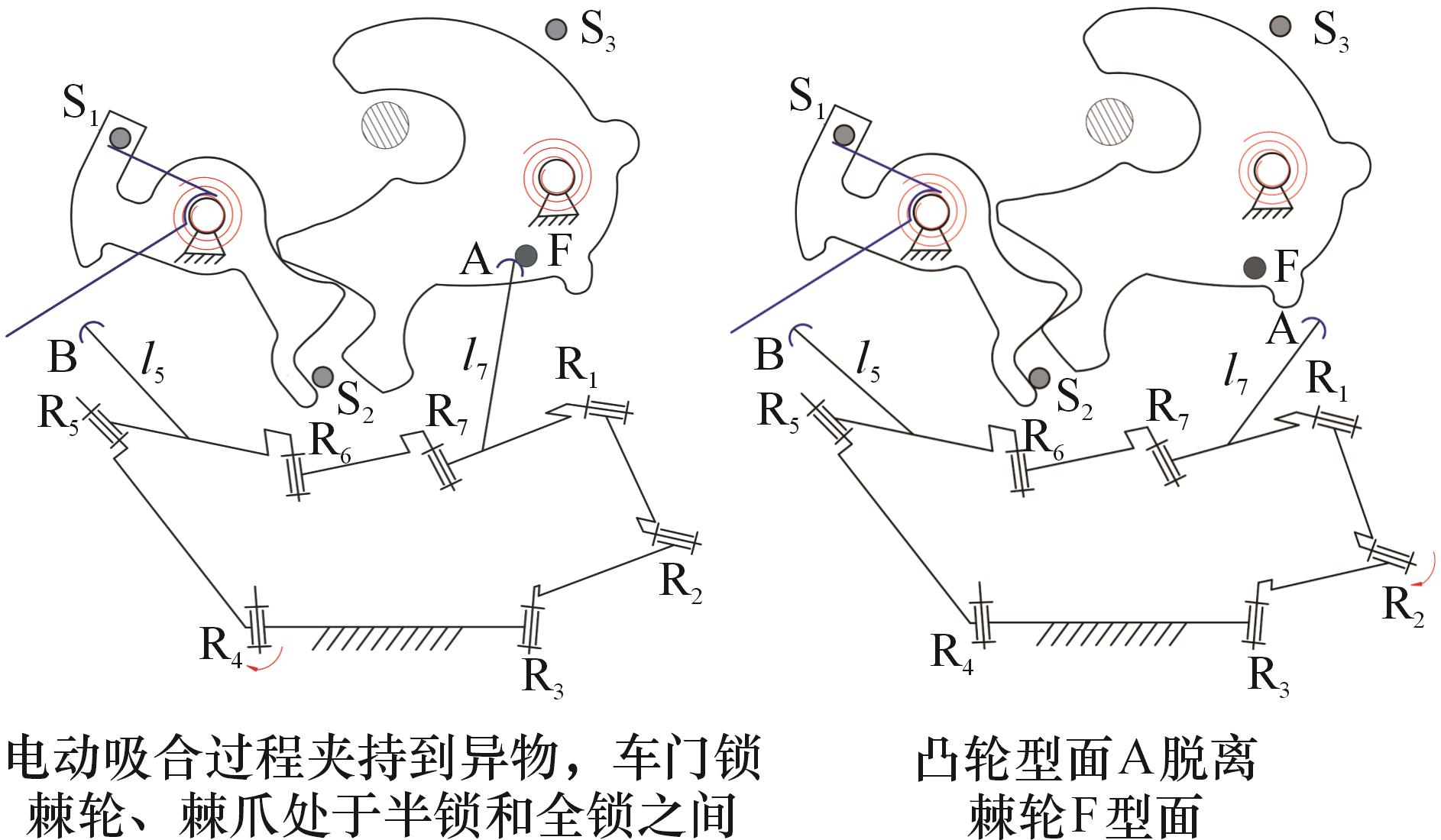 |
Tab.1 The corresponding working conditions of multi-mode 7R mechanism motion mode and multi-function vehicle side-door latch
运动 工况 | 7R机构运动模式、自由度 | 功能实现及 机构运动过程 | 考虑汽车门锁棘轮棘爪的机构方案示意图 |
|---|---|---|---|
电动 吸合 |
运动模式:空间7R运动模式; 驱动关节:关节R4顺时针运动; 机构自由度数目:1。 | 驱动关节R4顺时针转动,带动电动吸合执行杆l7运动,使吸合连杆末端凸轮型面A拨动半锁状态的棘轮型面F逆时针转动,如左图所示;棘轮拨动棘爪顺时针转动运动至全锁位置,如右图所示。 | |
异物 夹持 |
运动模式:空间7R运动模式; 驱动关节:关节R4驱动切换关节R2驱动; 机构自由度数目:1。 | 电动吸合过程遇到夹持异物的情况,感知夹持异物,控制系统停止关节R4电机驱动,切换到关节R2驱动吸合执行杆末端凸轮型面A与棘轮F型面脱离,实现停止吸合过程,棘轮回到半锁状态,继续驱动R2直到过渡构形。 | |
| [1] | KONG Xianwen, PFURNER M. Type Synthesis and Reconfiguration Analysis of a Class of Variable-DOF Single-loop Mechanisms[J]. Mechanism and Machine Theory, 2015, 85:116-128. |
| [2] | WENGER P, CHABLAT D. A Review of Cuspidal Serial and Parallel Manipulators[J]. Journal of Mechanisms and Robotics, 2023, 15(4):040801. |
| [3] | WENGER P. Cuspidal and Noncuspidal Robot Manipulators[J]. Robotica, 2007, 25(6):677-689. |
| [4] | SALUNKHE D H, SPARTALIS C, CAPCO J, et al. Necessary and Sufficient Condition for a Generic 3R Serial Manipulator to Be Cuspidal[J]. Mechanism and Machine Theory, 2022, 171:104729. |
| [5] | ZEIN M, WENGER P, CHABLAT D. Singular Curves and Cusp Points in the Joint Space of 3-RPR Parallel Manipulators[J]. Robotica,2007,25(6):717-724. |
| [6] | WOHLHART K. Kinematotropic Linkages[M]//Recent Advances in Robot Kinematics. Dordrecht:Springer Netherlands, 1996:359-368. |
| [7] | WHITNEY H. Tangents to an Analytic Variety[M]∥Hassler Whitney Collected Papers. Boston, MA: Birkhäuser Boston, 1992:537-590. |
| [8] | LERBET J. Analytic Geometry and Singularities of Mechanisms[J]. ZAMM—Journal of Applied Mathematics and Mechanics / Zeitschrift für Angewandte Mathematik und Mechanik, 1998, 78(10):687-694. |
| [9] | MÜLLER A. An Overview of Formulae for the Higher-order Kinematics of Lower-pair Chains with Applications in Robotics and Mechanism Theory[J]. Mechanism and Machine Theory, 2019, 142:103594. |
| [10] | MÜLLER A. Recursive Higher-order Constraints for Linkages with Lower Kinematic Pairs[J]. Mechanism and Machine Theory, 2016, 100:33-43. |
| [11] | MÜLLER A. Local Analysis of Singular Configurations of Open and Closed Loop Manipulators[J]. Multibody System Dynamics, 2002, 8(3):297-326. |
| [12] | MÜLLER A. Local Kinematic Analysis of Closed-loop Linkages-Mobility, Singularities, and Shakiness[J]. Journal of Mechanisms and Robotics, 2016, 8(4):041013. |
| [13] | MÜLLER A, LI Zijia. Identification of Real and Complex Solution Varieties and Their Singularities Defined by Loop Constraints of Linkages Using the Kinematic Tangent Cone[J]. Journal of Mechanisms and Robotics, 2024, 16(11):111003. |
| [14] | LI Zijia, MÜLLER A. Mechanism Singularities and Shakiness from an Algebraic Viewpoint[J]. Mechanism and Machine Theory, 2024, 191:105510. |
| [15] | 钟传磊. 汽车侧门锁电动开启与吸合的空间柔顺机构及运动稳定性研究[D]. 上海:上海工程技术大学, 2022. |
| ZHONG Chuanlei. Study on Spatial Compliant Mechanism and Motion Stability of Power Release and Electric Cinch in Vehicle Side Door Latch[D]. Shanghai:Shanghai University of Engineering Science, 2022. | |
| [16] | 殷传硕, 杭鲁滨, 钟传磊, 等. 面向车门锁电动吸合开启优先功能的凸轮摆杆柔顺连杆组合机构[J]. 机械传动, 2024, 48(4):138-147. |
| YIN Chuanshuo, HANG Lubin, ZHONG Chuanlei, et al. Cam Swing Linkage and Spring Linkage Combined Mechanism for Vehicle Side-door Latches with Electric Cinch and Release Priority Function[J]. Journal of Mechanical Transmission, 2024, 48(4):138-147. | |
| [17] | 钟传磊, 杭鲁滨, 王明远, 等. 用于汽车门锁的多运动模式空间柔顺开启机构及稳定性分析[J]. 机械科学与技术, 2023, 42(11):1801-1810. |
| ZHONG Chuanlei, HANG Lubin, WANG Mingyuan, et al. Stability Analysis and Spatial Compliant Power Release Mechanism of Vehicle Door Latch with Multi-mode Motion[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(11):1801-1810. | |
| [18] | HUSTY M L, PFURNER M, SCHRÖCKER H P, et al. Algebraic Methods in Mechanism Analysis and Synthesis[J]. Robotica, 2007, 25(6):661-675. |
| [19] | HUSTY M L, SCHRÖCKER H P. Algebraic Geometry and Kinematics[M]∥Nonlinear Computational Geometry. New York:Springer New York, 2009:85-107. |
| [20] | 王东明. 多项式代数[M]. 北京:高等教育出版社, 2011:137-142. |
| WANG Dongming. Polynomial Algebra[M]. Beijing: Higher Education Press, 2011:137-142. | |
| [21] | LÓPEZ-CUSTODIO P C, MÜLLER A, KANG X, et al. Tangential Intersection of Branches of Motion[J]. Mechanism and Machine Theory, 2020, 147:103730. |
| [1] | CHEN Xiulong, SUN Chuijun, DENG Yu. Rigid-Flexible Coupling Dynamics Analyses and Experiments of Spatial Parallel Mechanisms with Clearances [J]. China Mechanical Engineering, 2026, 37(3): 586-594. |
| [2] | HU Zhichao, CHANG Yong, YANG Fufu, WEN Shengxing. Study on No-undercutting and Its Solution Spaces of Cam Mechanisms with Negative Radius Roller Follower [J]. China Mechanical Engineering, 2026, 37(3): 604-611. |
| [3] | FENG Shengquan, QU Shuwei, LI Ruiqin, YAO Wei, MA Chunsheng. Design of a 3(rU)PU Metamorphic Parallel Mechanism Based on Variable Axis Kinematic Pairs [J]. China Mechanical Engineering, 2026, 37(2): 361-373. |
| [4] | HE Kun, ZHOU Hechao, ZHANG Jimin. Design of Negative Poisson's Ratio Metamaterial Filling Structures for Train Anti-climb Energy Absorbers [J]. China Mechanical Engineering, 2025, 36(12): 3040-3046. |
| [5] | WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2885-2893. |
| [6] | Wuchao CHEN, Xiangdong YU, Kun HE, Jimin ZHANG. Load Carrying Characteristics of Permanent Magnetic Thrust Bearings with Modularized Multi-cellular Elements [J]. China Mechanical Engineering, 2025, 36(10): 2300-2305. |
| [7] | Ningning HUANG, Jingjing YOU, Pengda YE, Huiping SHEN, Chenggang LI, Hongtao WU. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(09): 1951-1960. |
| [8] | Zhiwei ZHOU, Jian GAO, Lanyu ZHANG. A Model-free Cross-coupling Control Method for Parallel Kinematic Mechanisms with Symmetric Structure [J]. China Mechanical Engineering, 2025, 36(08): 1691-1699. |
| [9] | Ju LI, Yue GUO, Huiping SHEN, Qinmei MENG, Xiaoyang GU. Optimization Principle and General Method for Multiple Topology Decoupling of Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(08): 1700-1712. |
| [10] | Yonggang HUANG, Dan XIE. Curvature Parameterization Model for Variable Cross-section Euler Beams under Large Deflection [J]. China Mechanical Engineering, 2025, 36(08): 1757-1766. |
| [11] | ZHANG Guangshuai, SUN Liangbo, LIU Xiaocui, ZHANG Deping, ZHOU Huaxi. Isomorphism Identification Method for Kinematic Chain Based on Exchange and Comparison of Lower Triangular Matrix with Whole Information [J]. China Mechanical Engineering, 2025, 36(06): 1178-1187,1221. |
| [12] | ZHAO Shunqing1, WENG Mingze2, WU Jianxu1, YAO Yanan1. Design and Obstacle-surmounting Performance Analysis of an Integrated Reconfigurable Closed-chain Leg Mechanism [J]. China Mechanical Engineering, 2025, 36(01): 47-58. |
| [13] | CHEN Xiulong, WANG Aiguo, WANG Jingqing. Dynamics Optimization Design of Multi-link Mechanisms with Lubrication Clearances of Revolute Joints [J]. China Mechanical Engineering, 2025, 36(01): 87-95. |
| [14] | HU Bo1, 2, ZHAO Jinjun1, 2, LIU Jianzheng1, 2, ZONG Hongyi1, 2. Terminal Constraint Analysis of (3-RPS)+(2-RCR) Hybrid Mechanisms [J]. China Mechanical Engineering, 2024, 35(09): 1548-1558. |
| [15] | CHANG Boyan1, 2, GUAN Xin1, JIN Guoguang1, 2, LIANG Dong1, 2. Geometric Design and Performance Analysis of Multi-closed-loop Deployable Honeycomb Mechanisms with Thick Panels [J]. China Mechanical Engineering, 2024, 35(07): 1156-1167. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||