

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (2): 361-373.DOI: 10.3969/j.issn.1004-132X.2026.02.011
FENG Shengquan1, QU Shuwei1,3( ), LI Ruiqin1, YAO Wei2, MA Chunsheng1
), LI Ruiqin1, YAO Wei2, MA Chunsheng1
Received:2024-08-15
Online:2026-02-25
Published:2026-03-13
Contact:
QU Shuwei
Supported by:
冯盛权1, 屈淑维1,3(), 李瑞琴1, 姚威2, 马春生1
通讯作者:
屈淑维
作者简介:冯盛权,男,1999年生,硕士研究生。研究方向为机构理论与机器人装备基金资助:CLC Number:
FENG Shengquan, QU Shuwei, LI Ruiqin, YAO Wei, MA Chunsheng. Design of a 3(rU)PU Metamorphic Parallel Mechanism Based on Variable Axis Kinematic Pairs[J]. China Mechanical Engineering, 2026, 37(2): 361-373.
冯盛权, 屈淑维, 李瑞琴, 姚威, 马春生. 基于变轴线运动副3(rU)PU变胞并联机构设计[J]. 中国机械工程, 2026, 37(2): 361-373.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.02.011
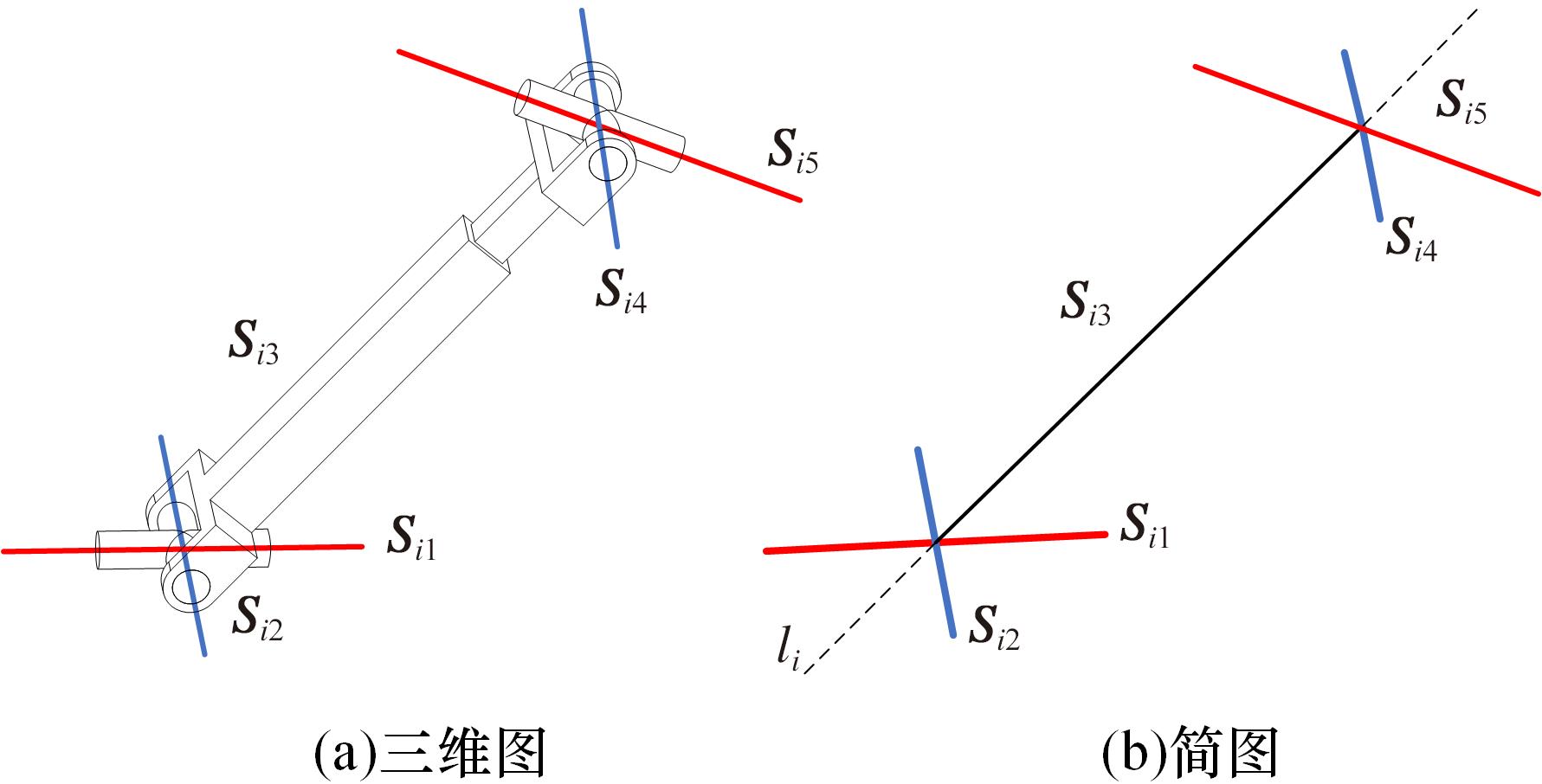
Fig.1 The UPU limb
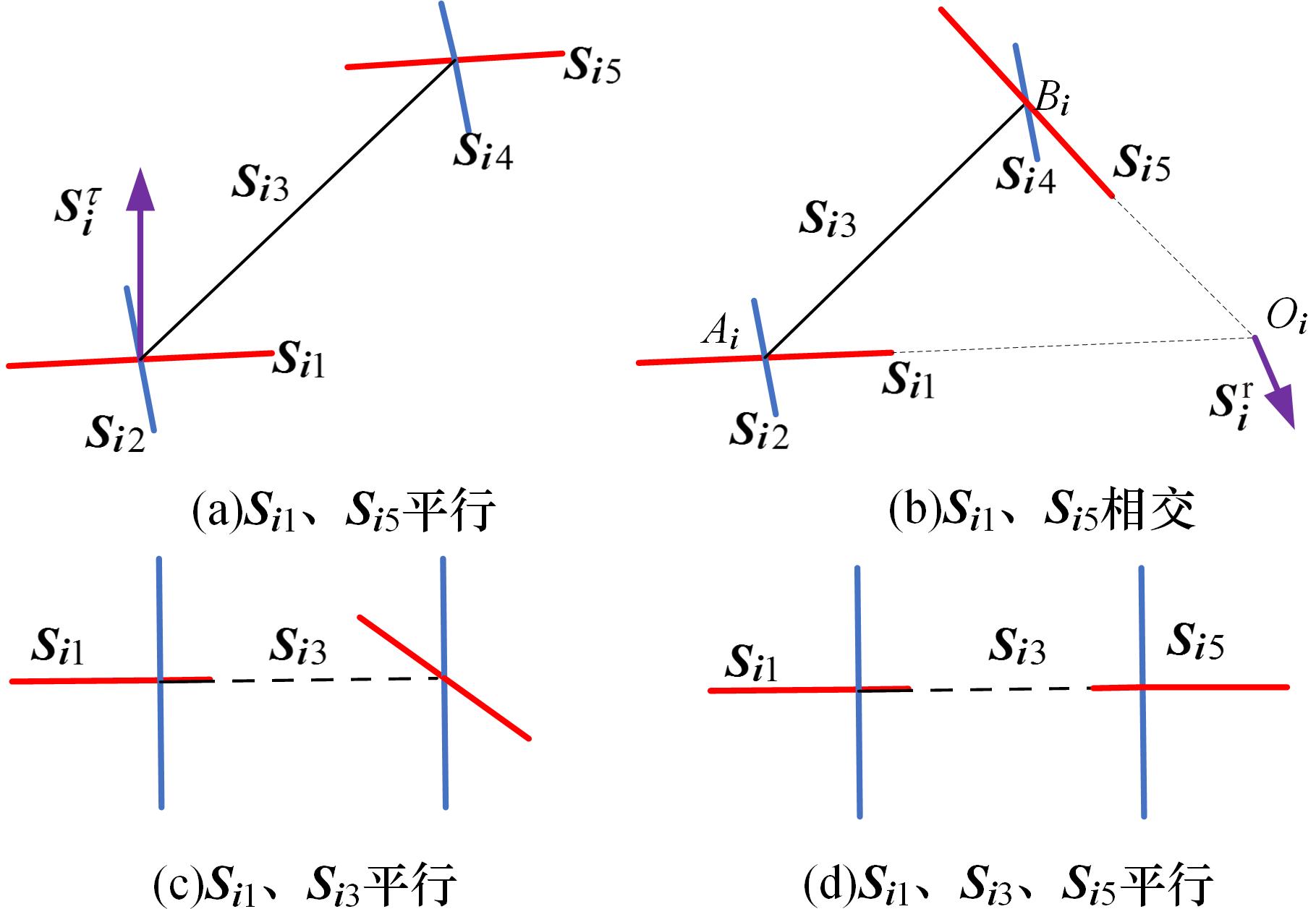
Fig.2 Diagram of UPU limb
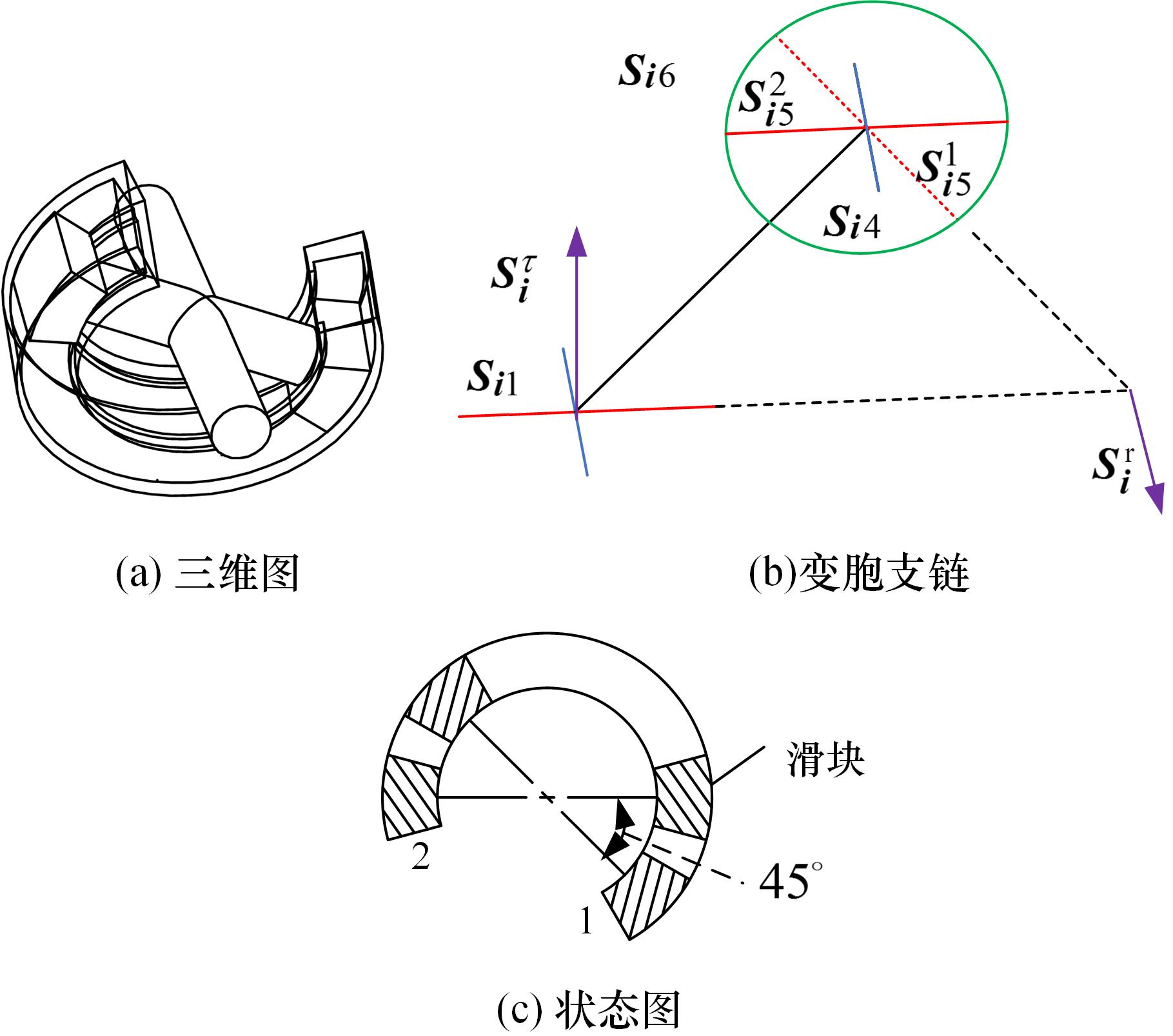
Fig.3 The variable axis kinematic pair
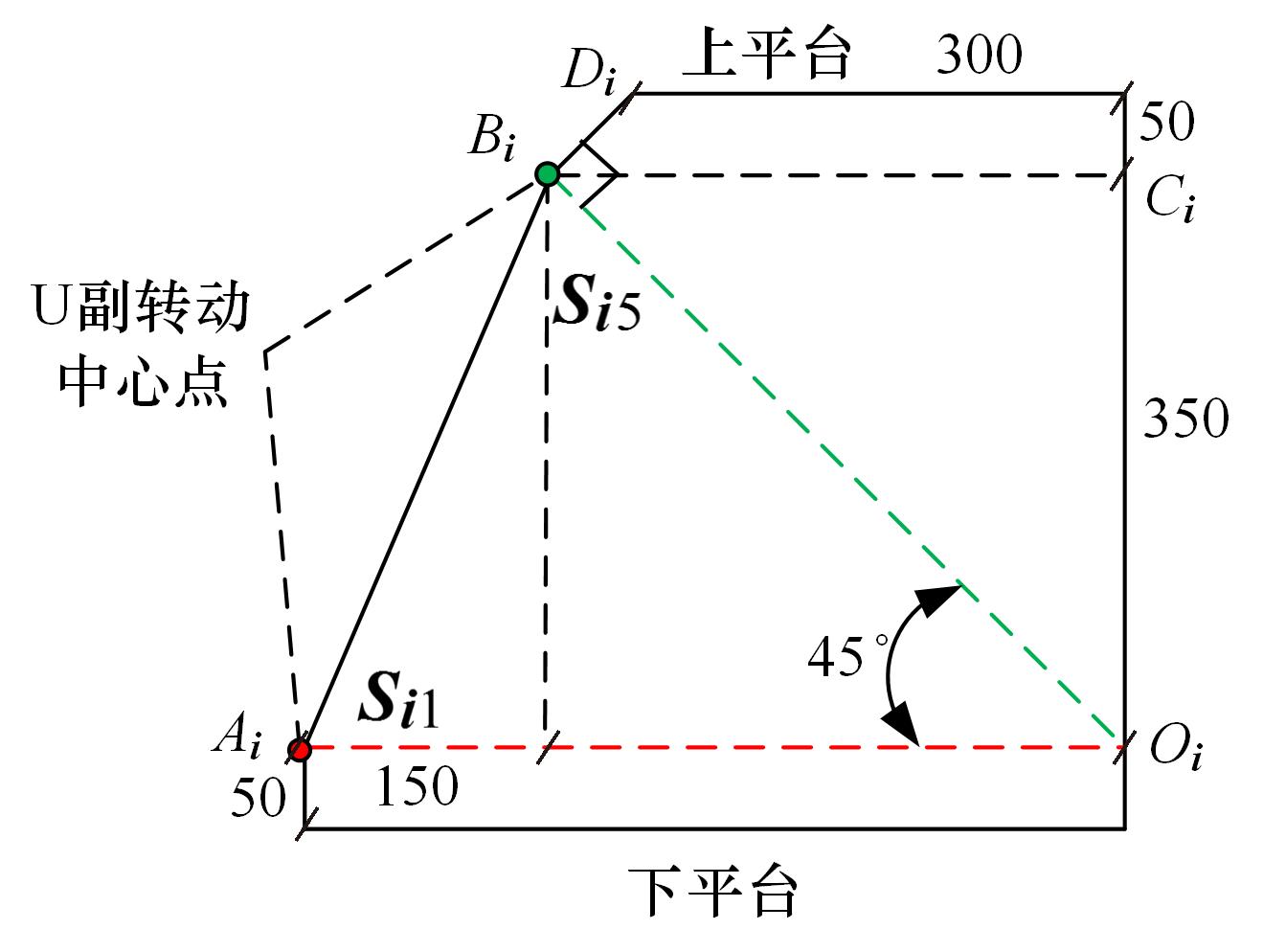
Fig.4 Geometric conditions of the mechanism
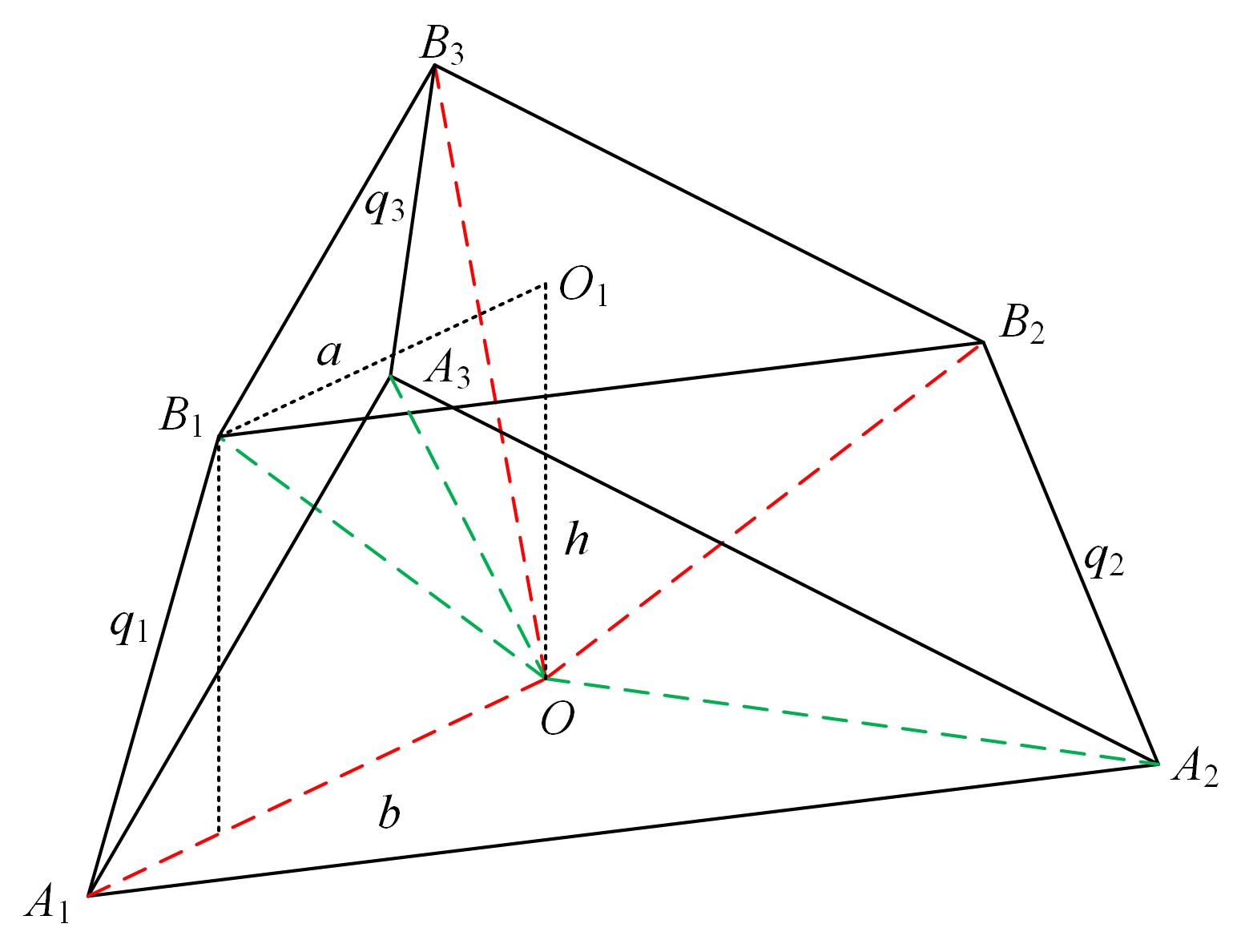
Fig.5 Initial geometrical conditions of the mechanism
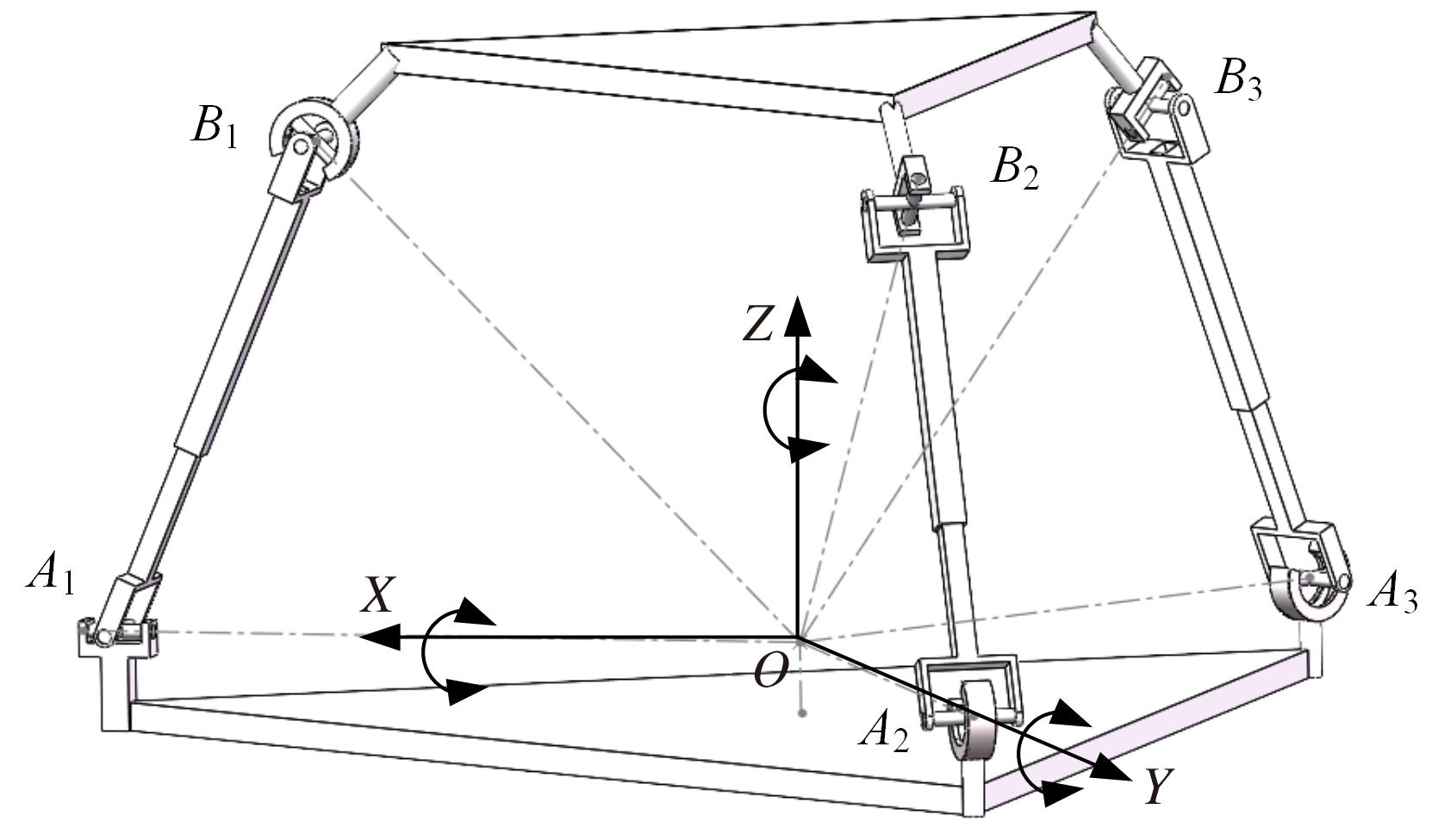
Fig.6 The 3(rU)PU metamorphic parallel mechanism
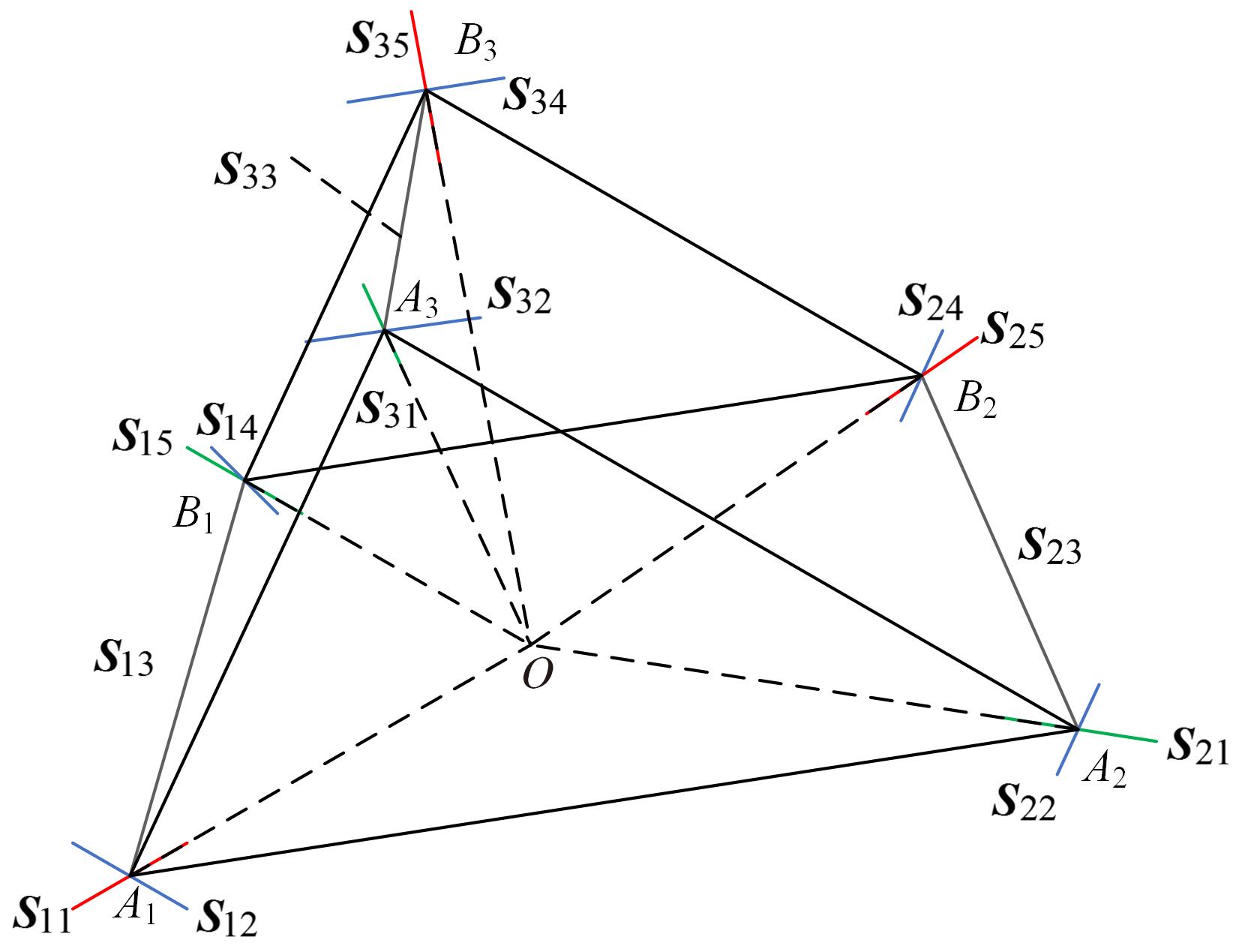
Fig.7 Diagram of 3R mode mechanism
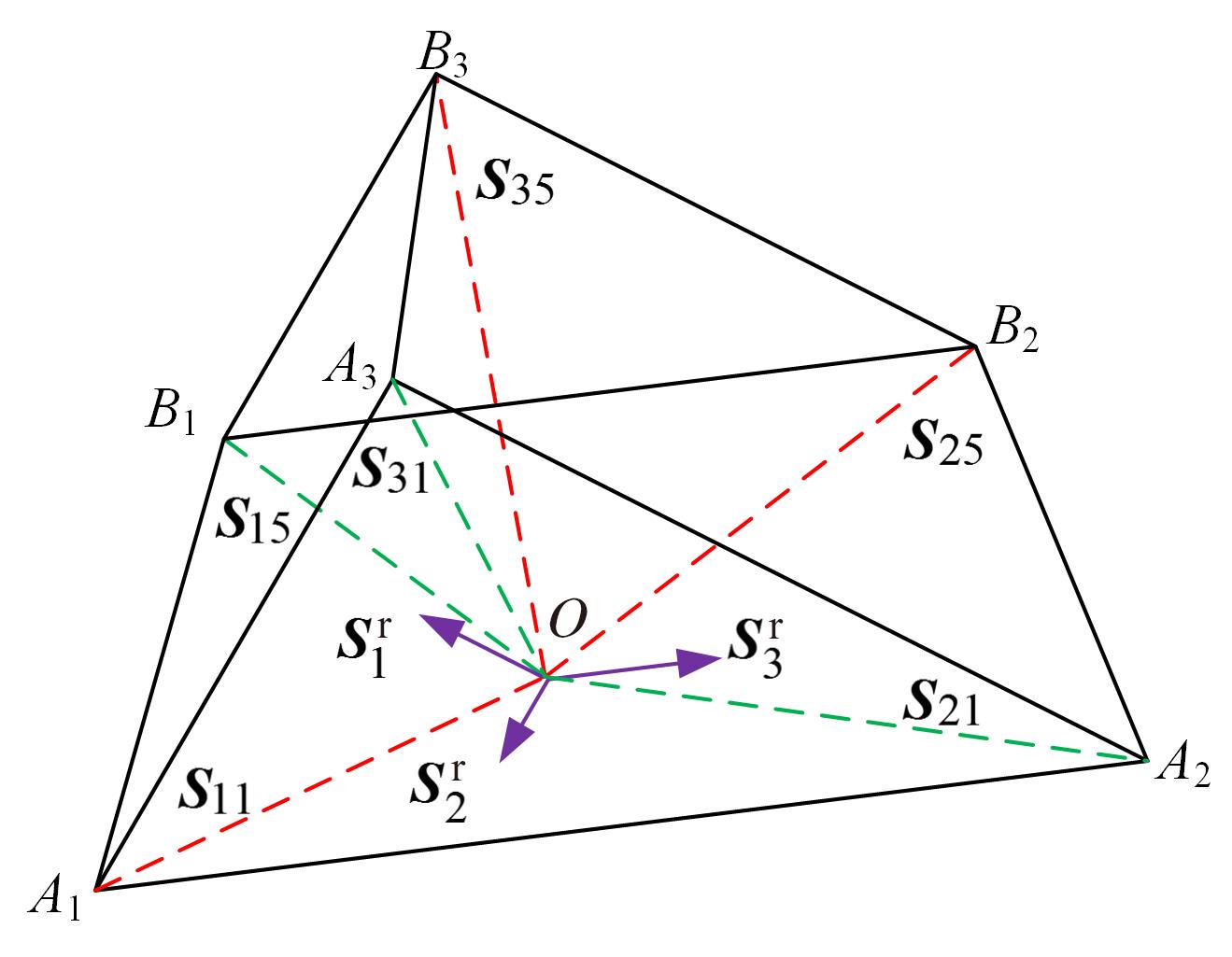
Fig.8 Equivalent diagram of 3R mode
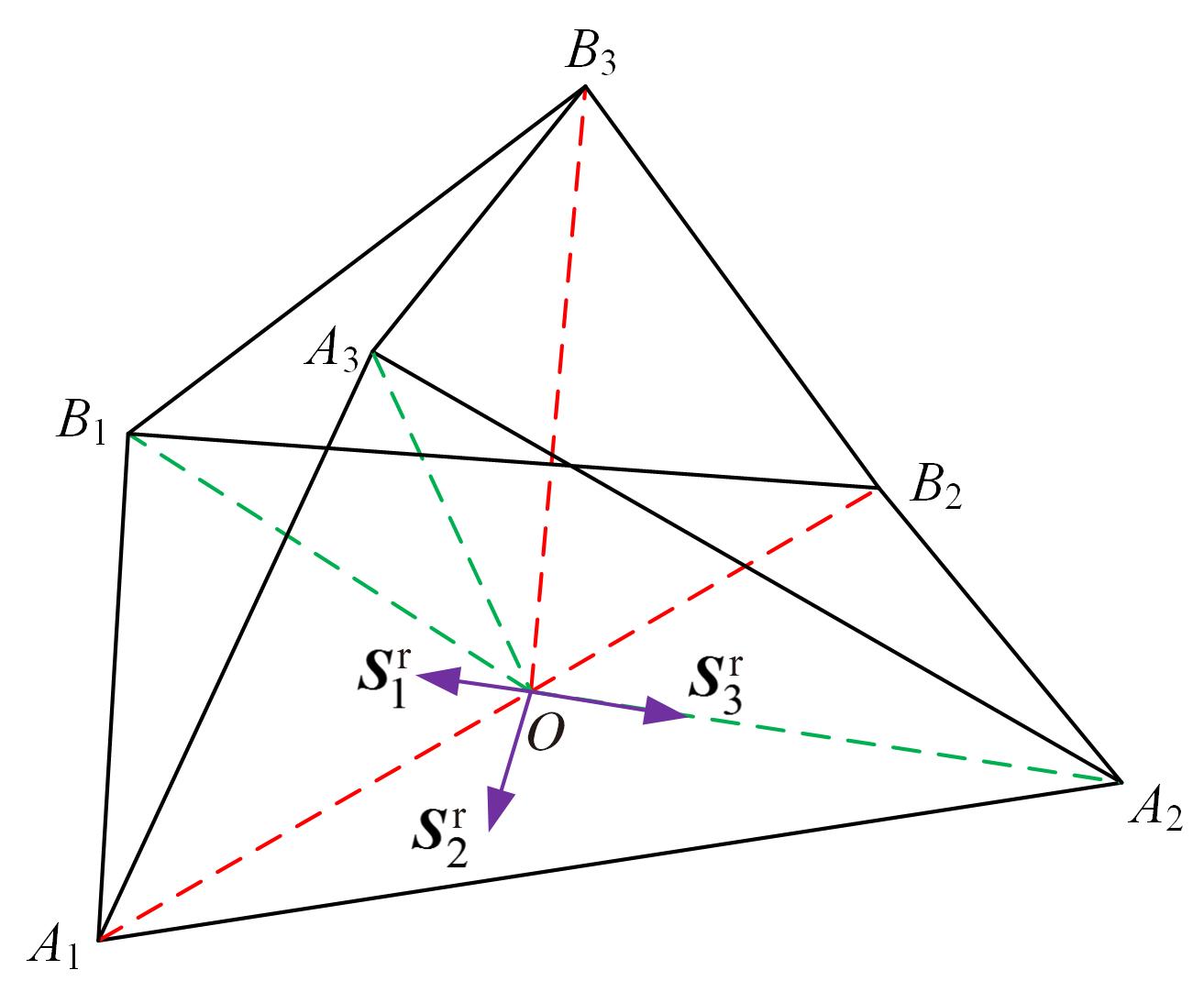
Fig.9 The 3R mode after rotating
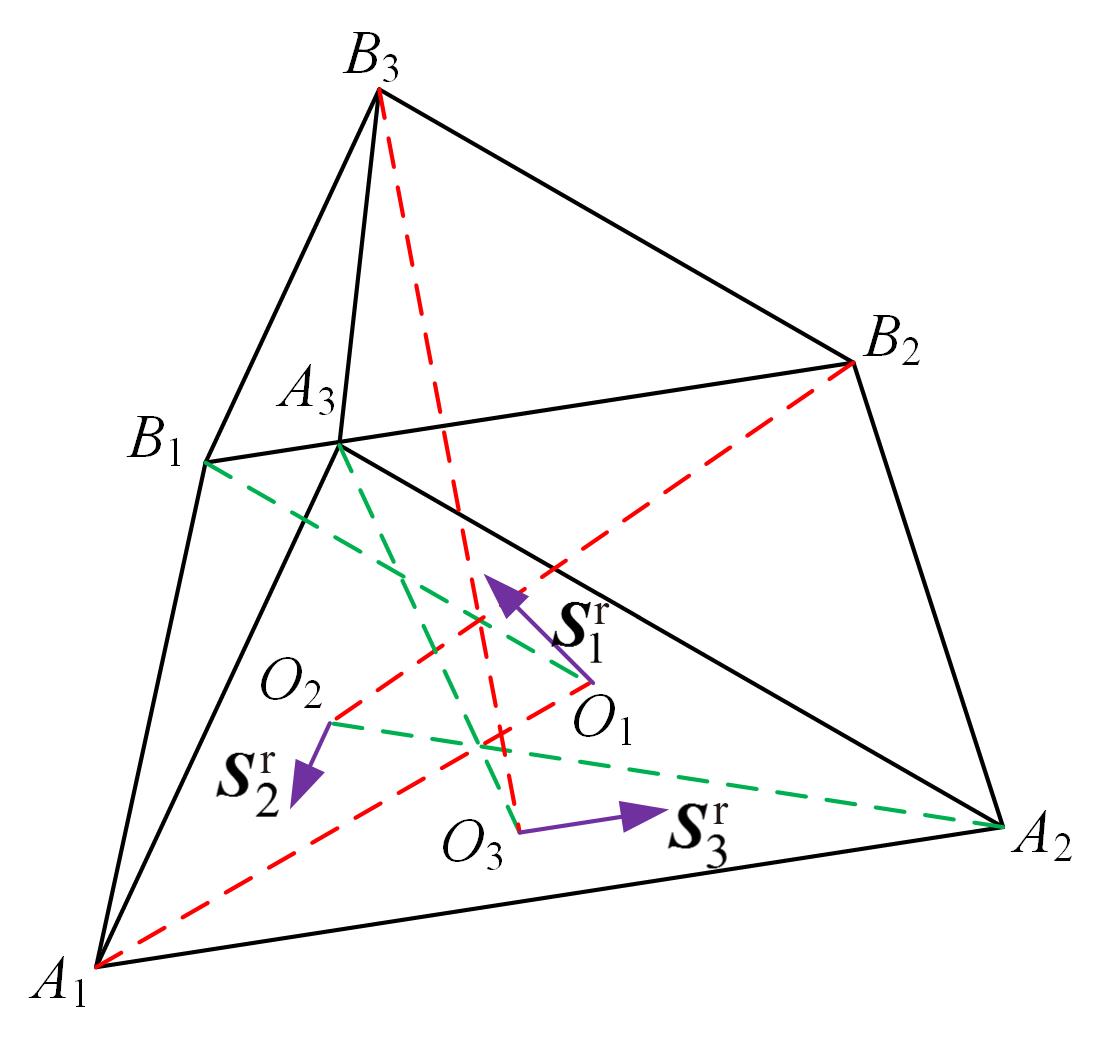
Fig.10 The 3R mode after translating along Z axis
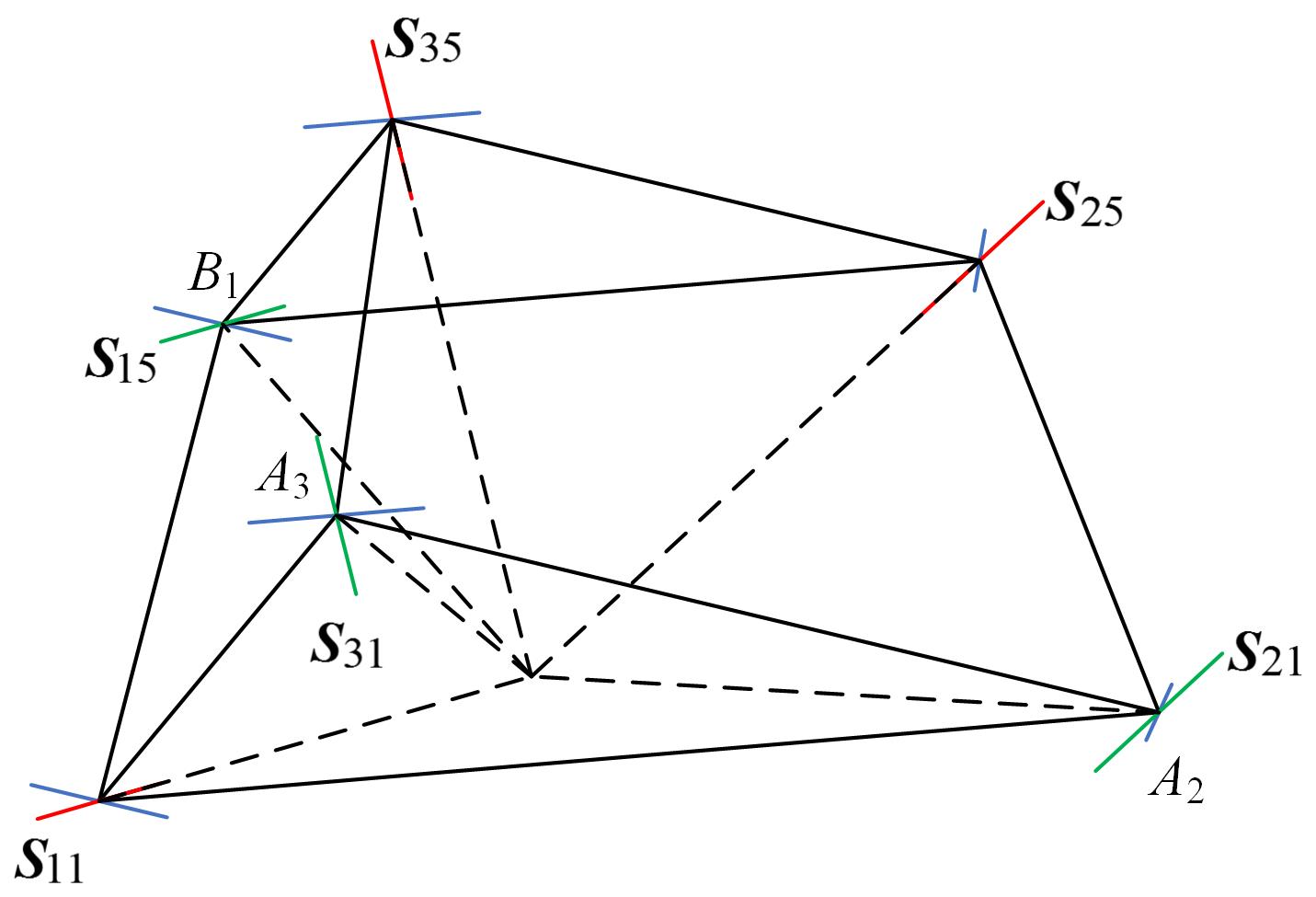
Fig.11 Diagram of 3T mode mechanism
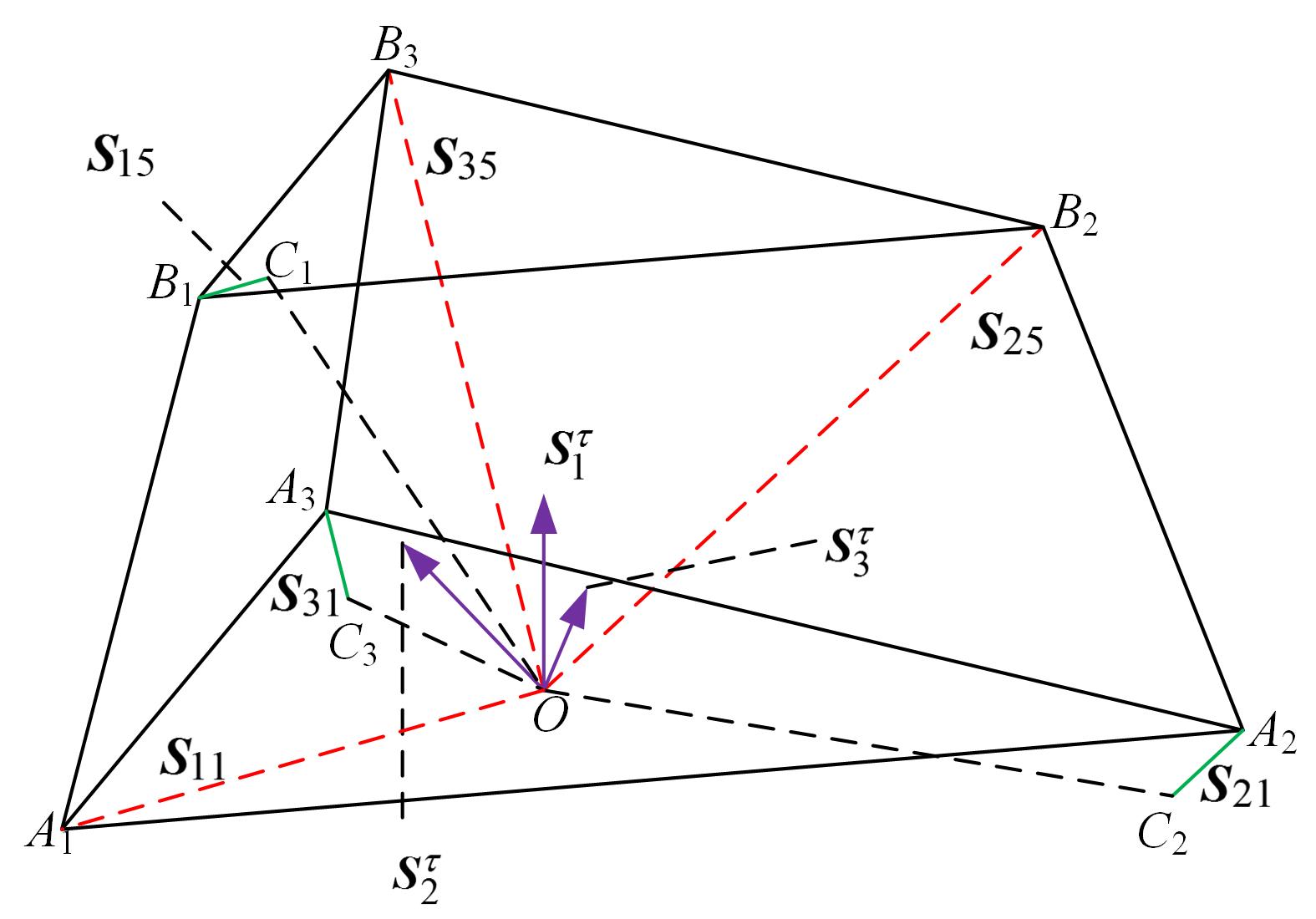
Fig.12 Equivalent diagram of 3T mode
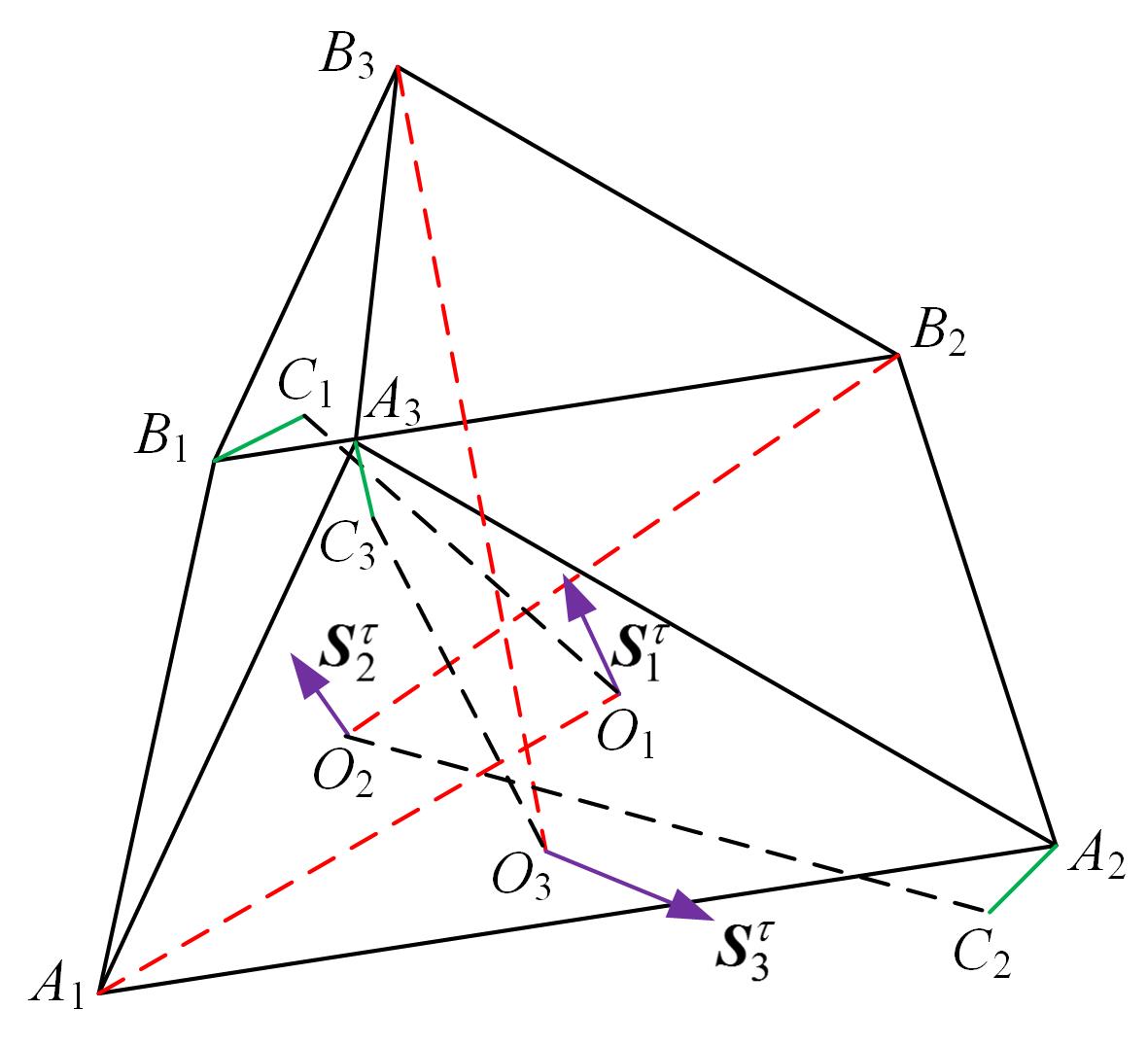
Fig.13 The 3T mode after translating
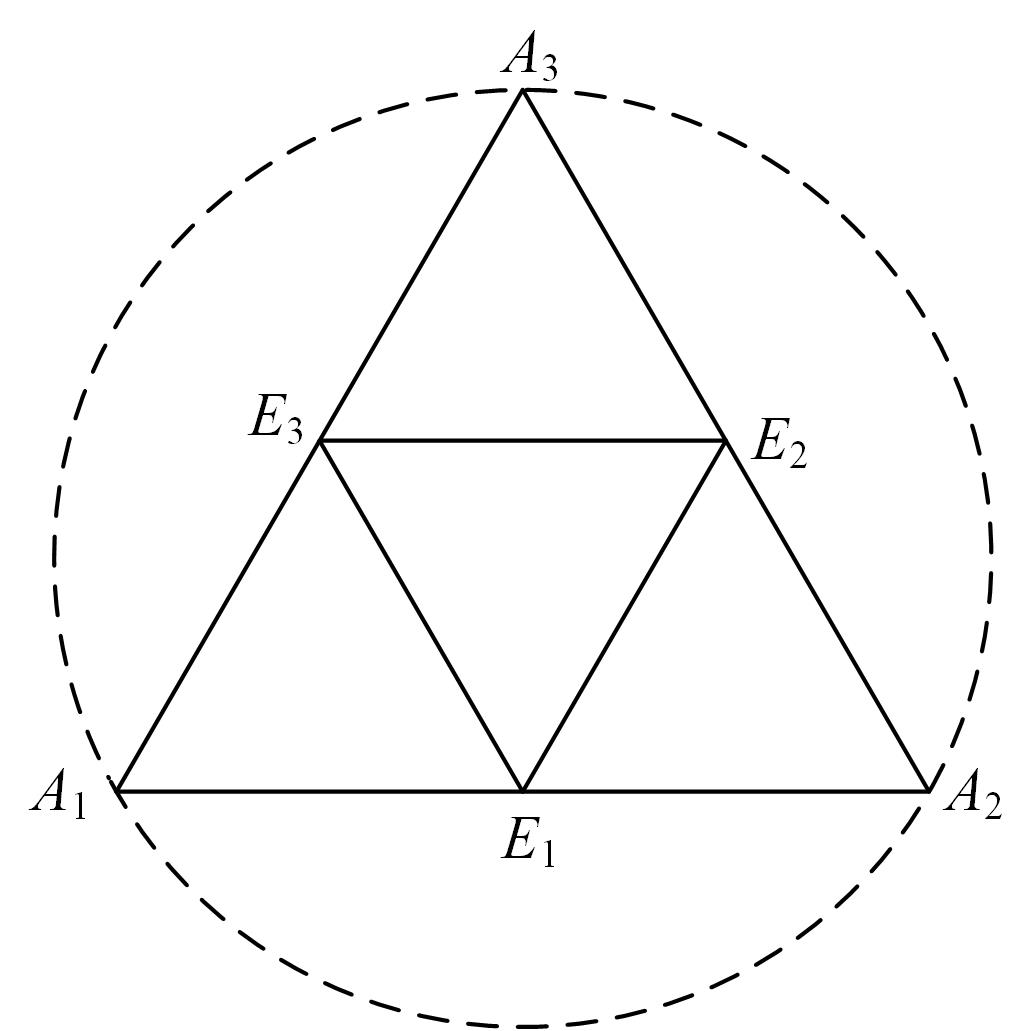
Fig.14 Geometric relationship of the retractable platform
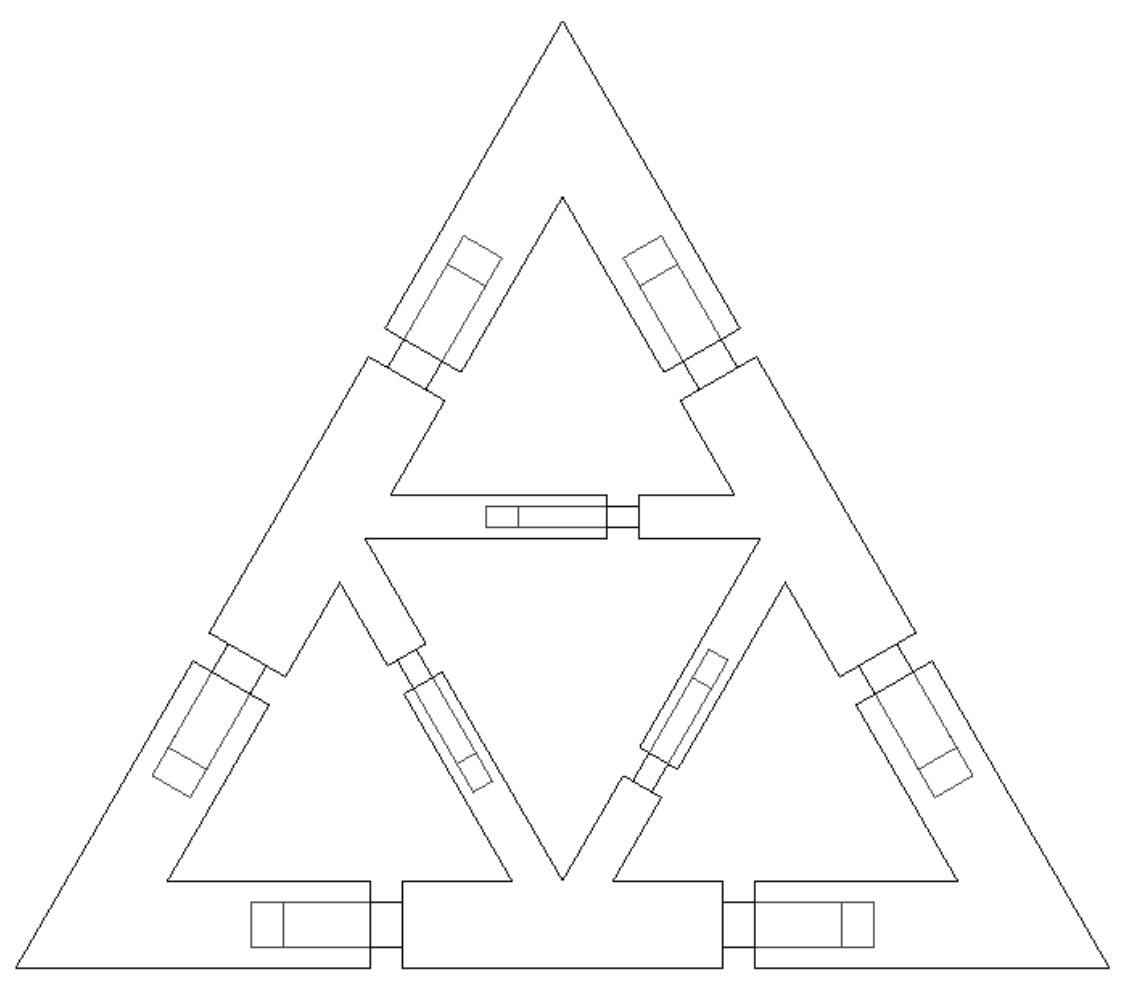
Fig.15 The retractable platform
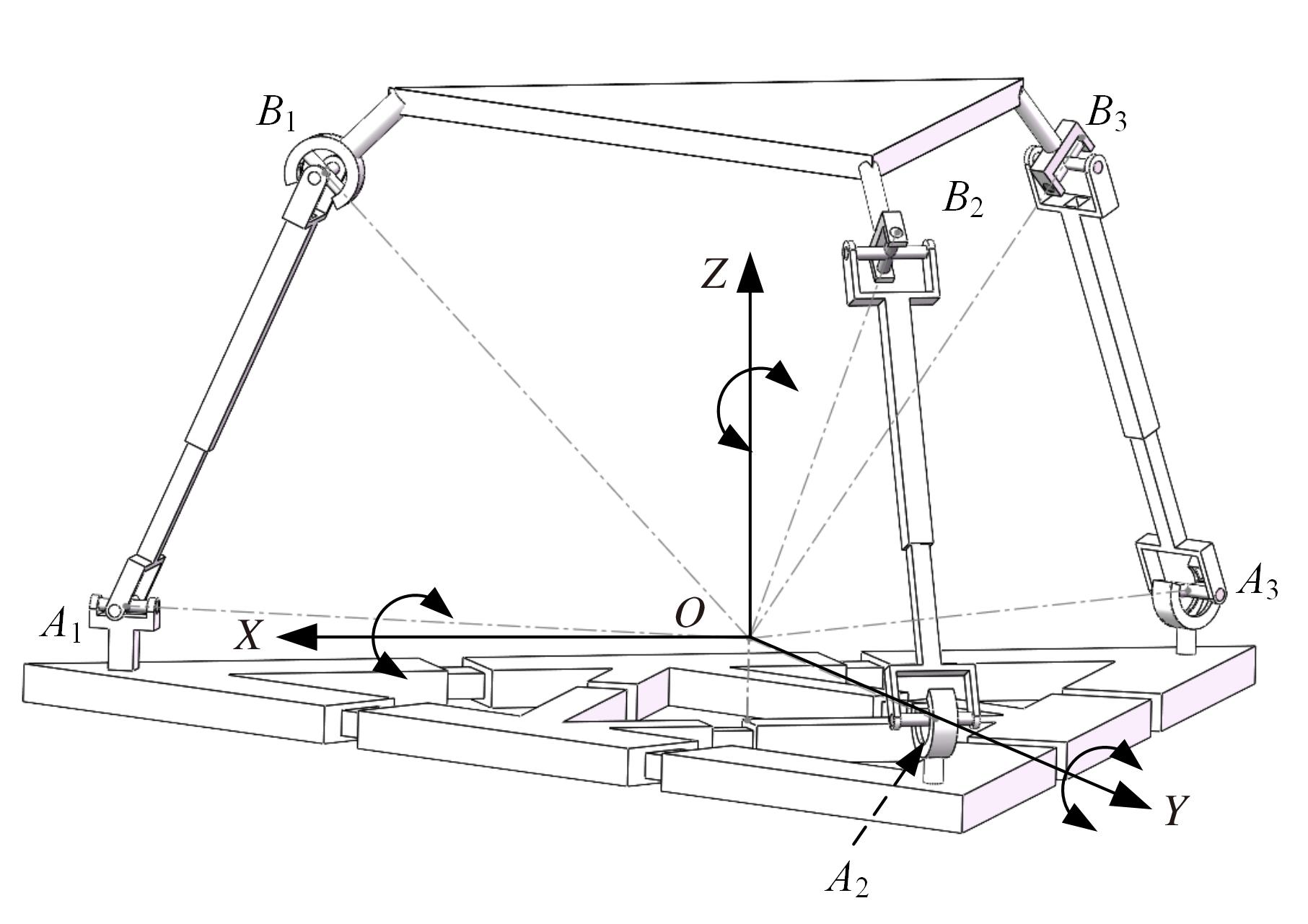
Fig.16 Overall configuration of 3(rU)PU metamorphic parallel mechanism
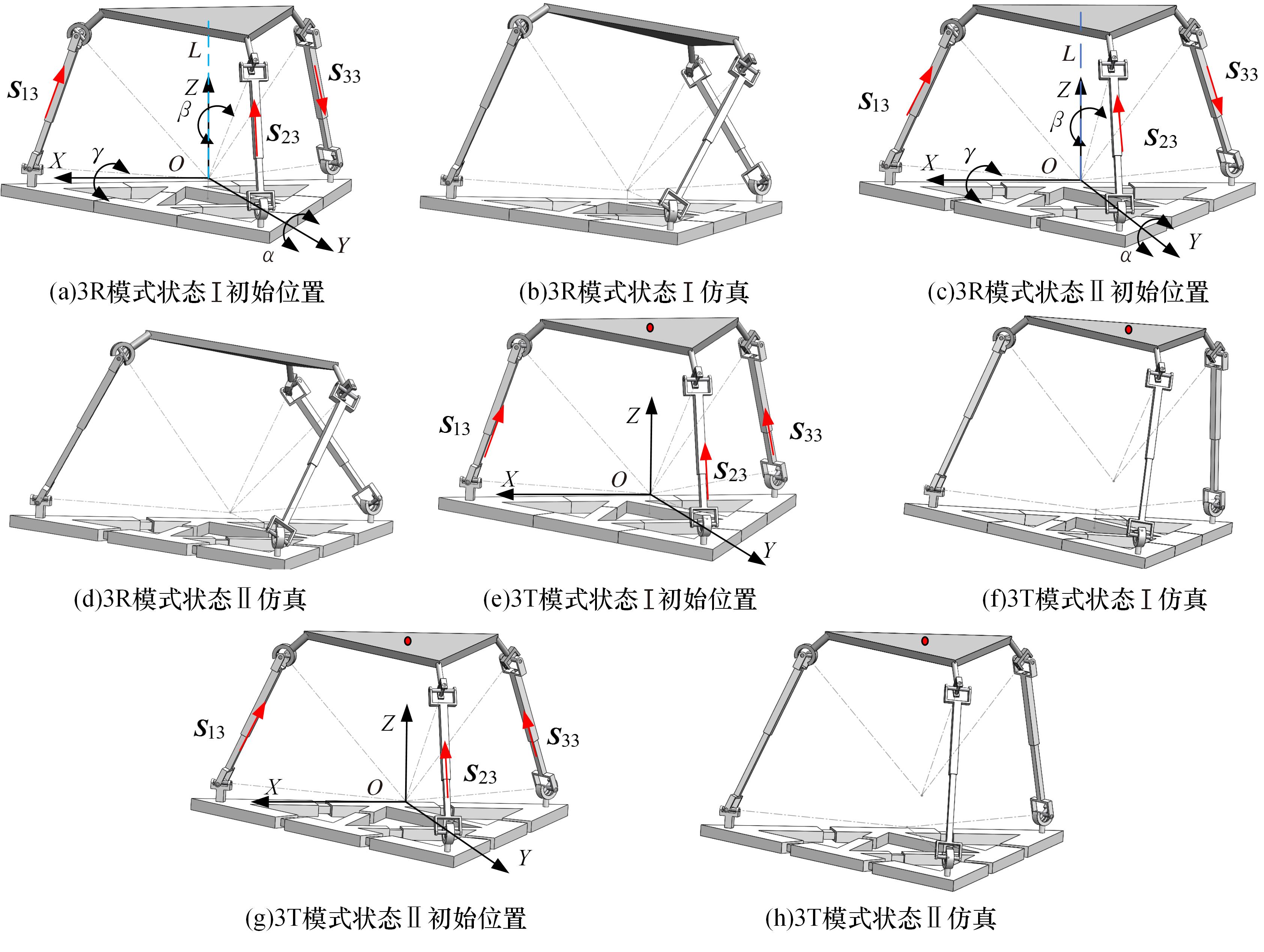
Fig.17 Model and state simulation of 3(rU)PU metamorphic parallel mechanisms
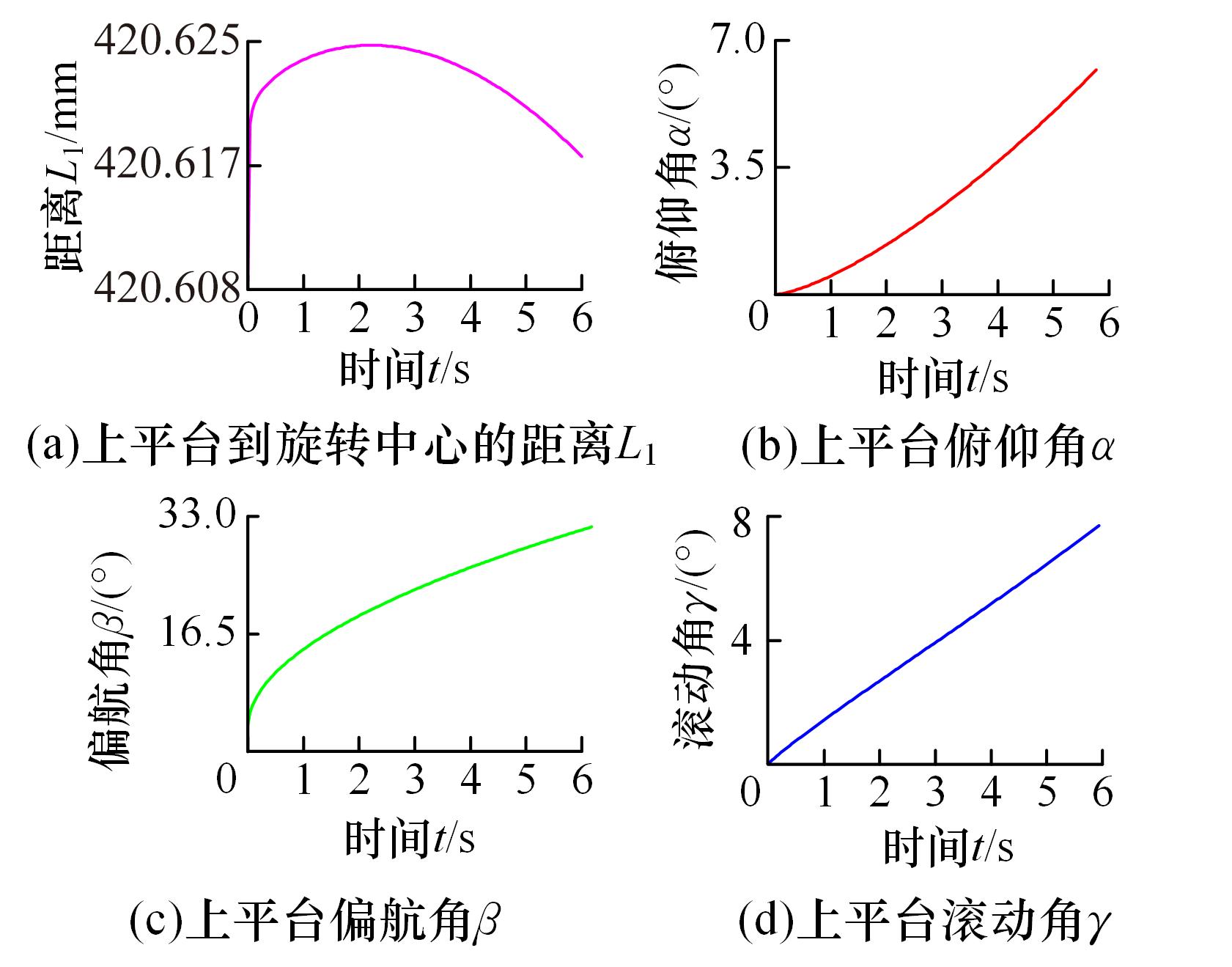
Fig.18 The 3R mode one-state simulation
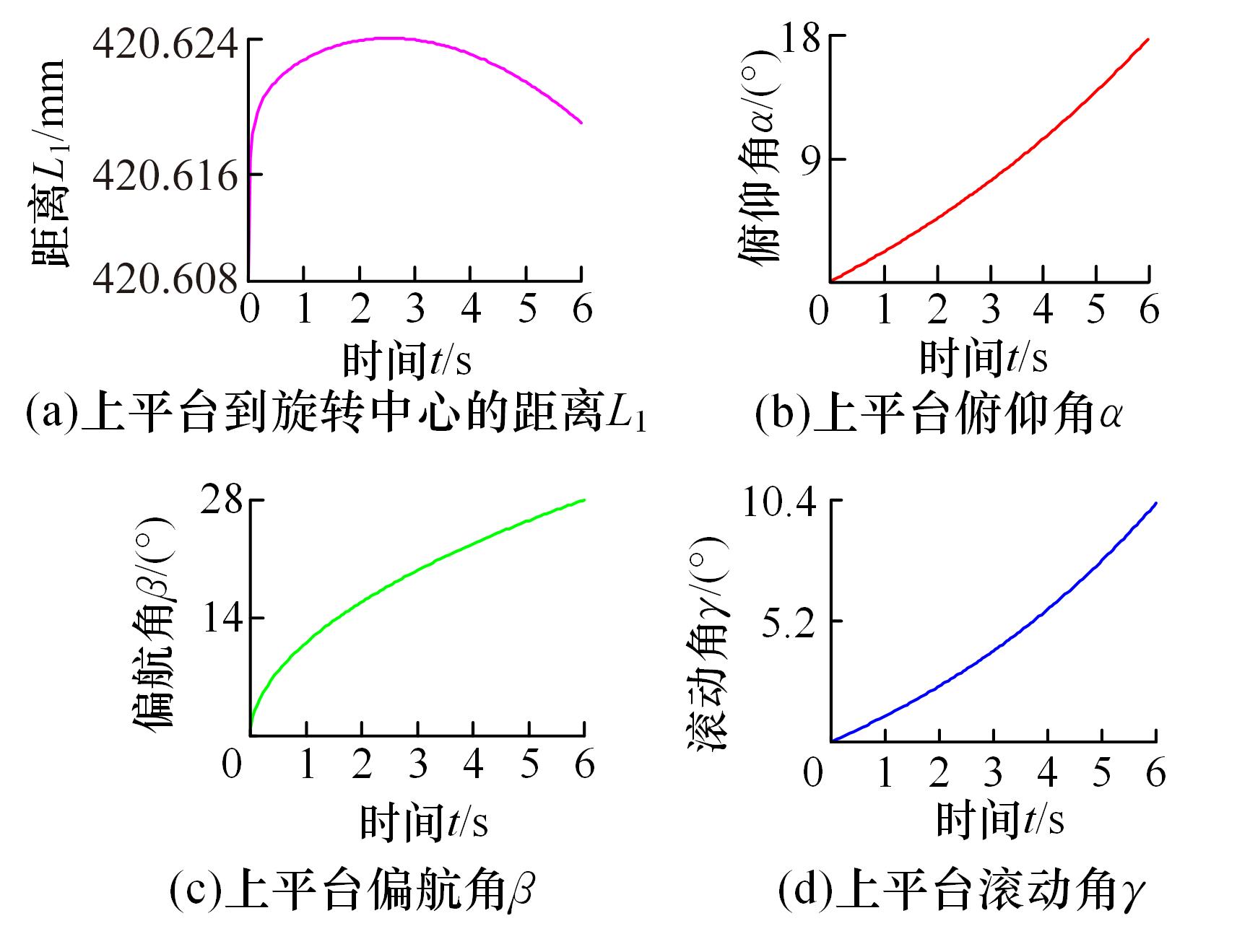
Fig.19 The 3R mode two-state simulation
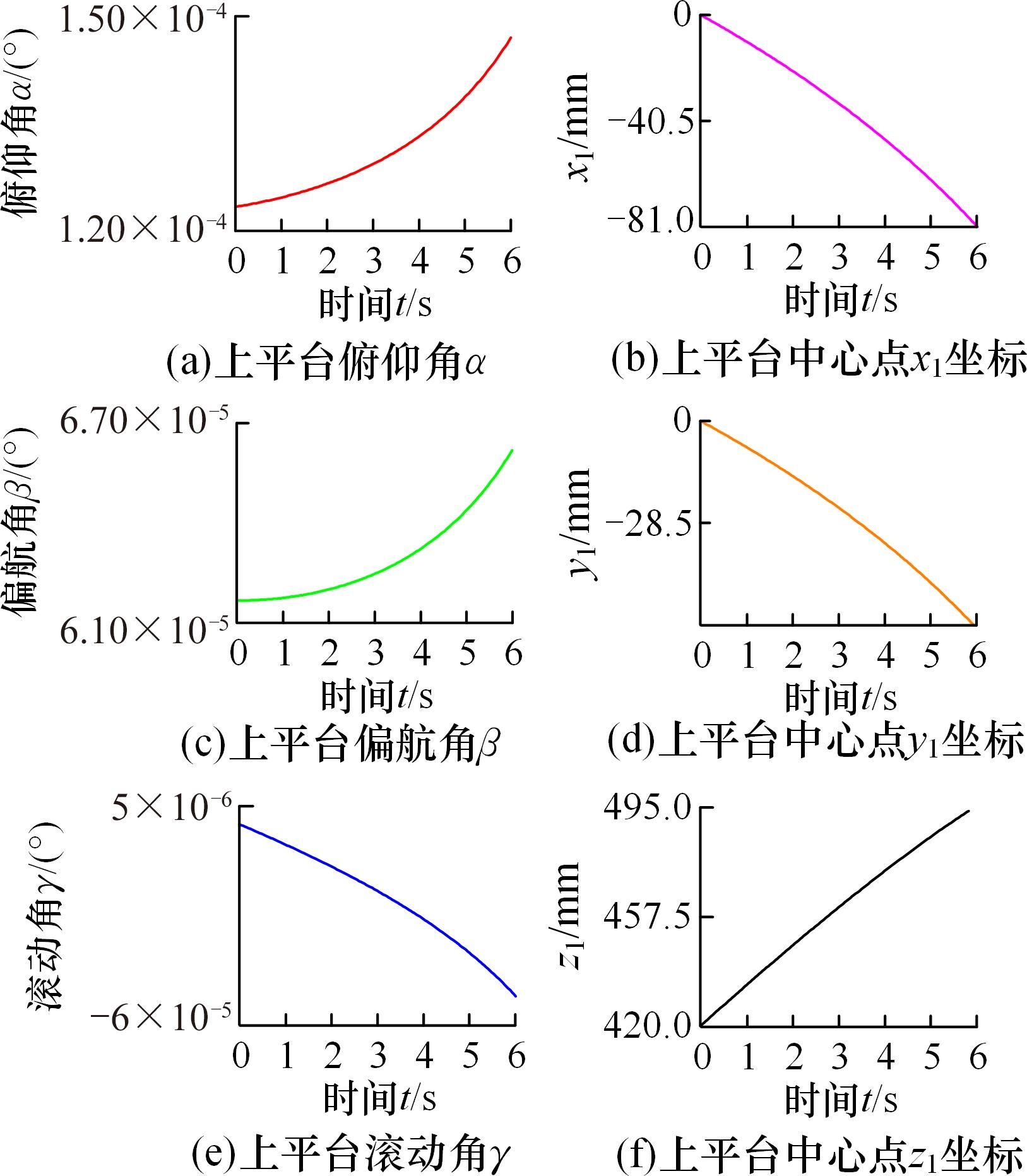
Fig.20 The 3T mode one-state simulation
Fig.21 The 3T mode two-state simulation
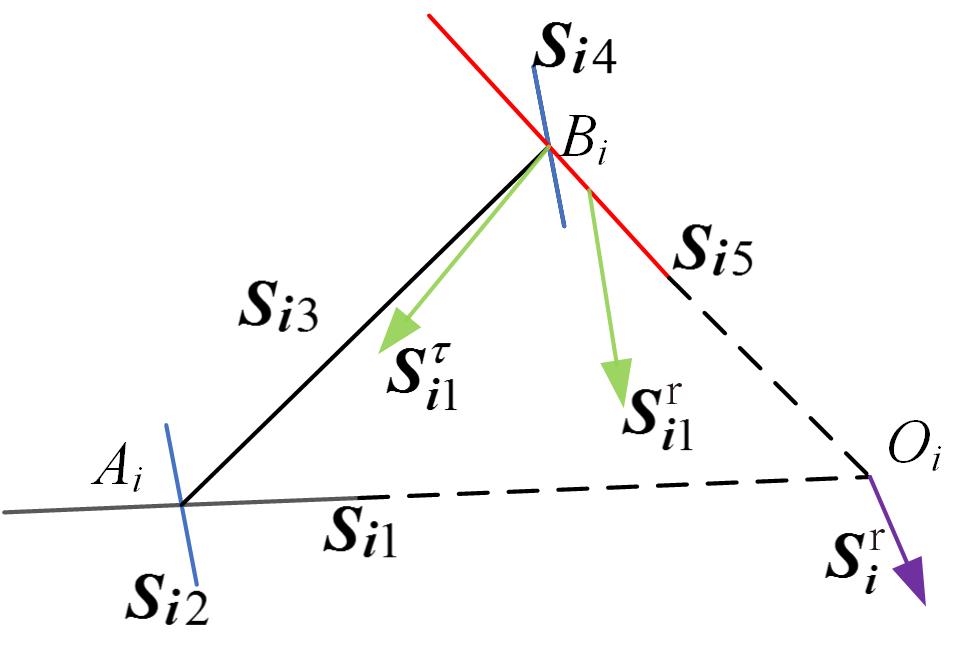
Fig.22 Constraints on the intersecting limbafter locked Si1
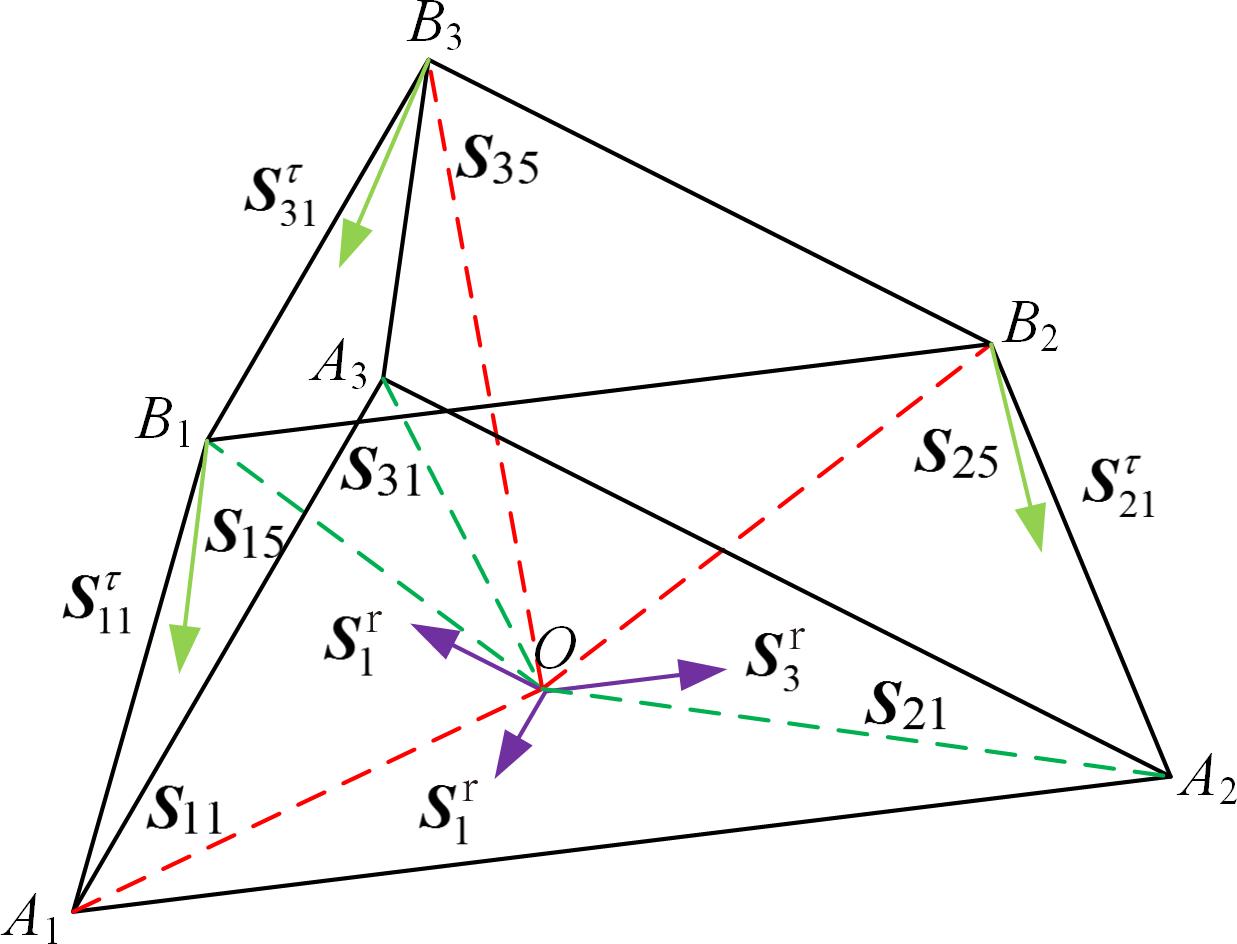
Fig.23 The 3R mode after locked Si1
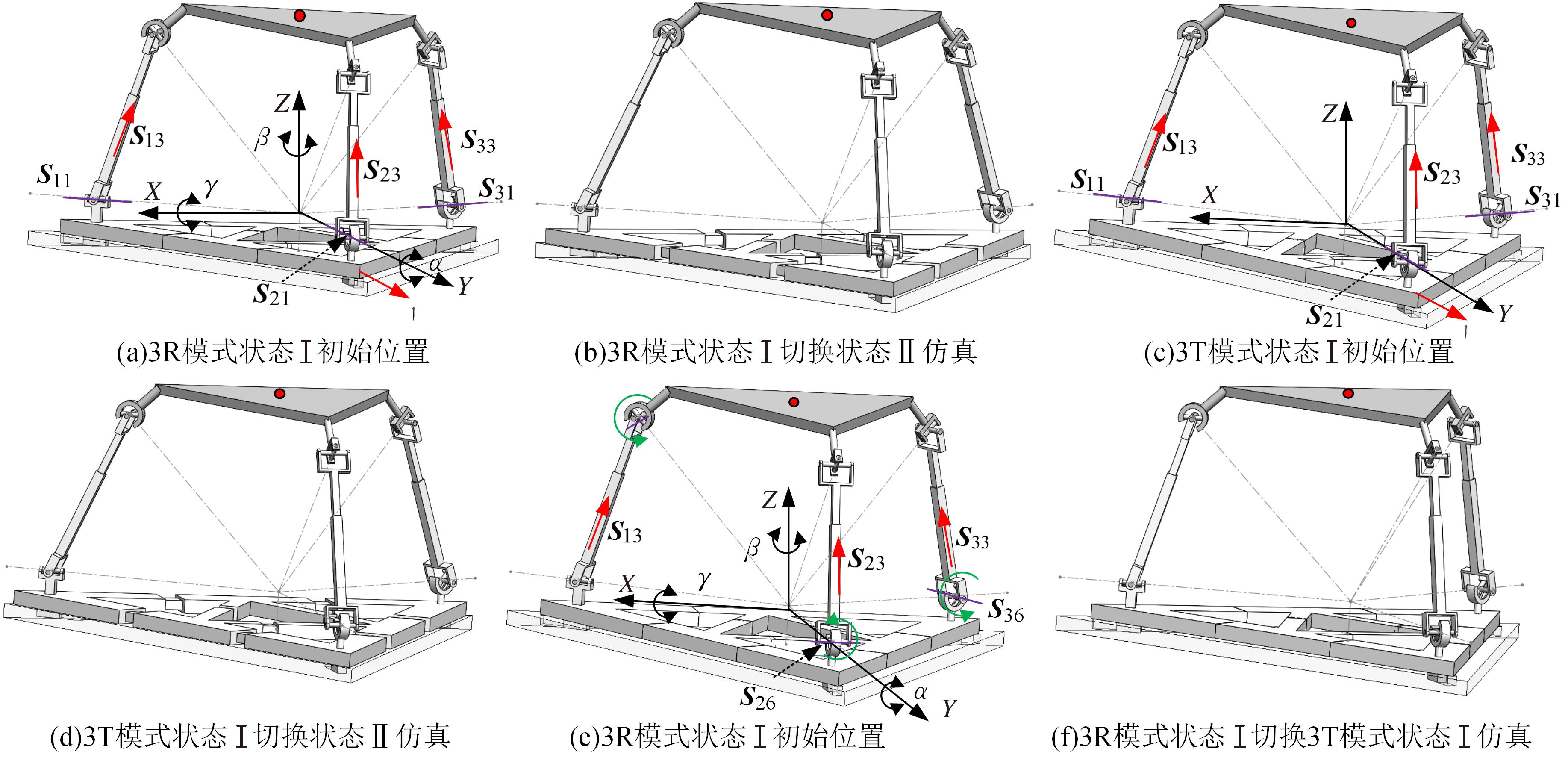
Fig. 24 Model and state switching simulation of 3(rU)PU metamorphic parallel mechanisms
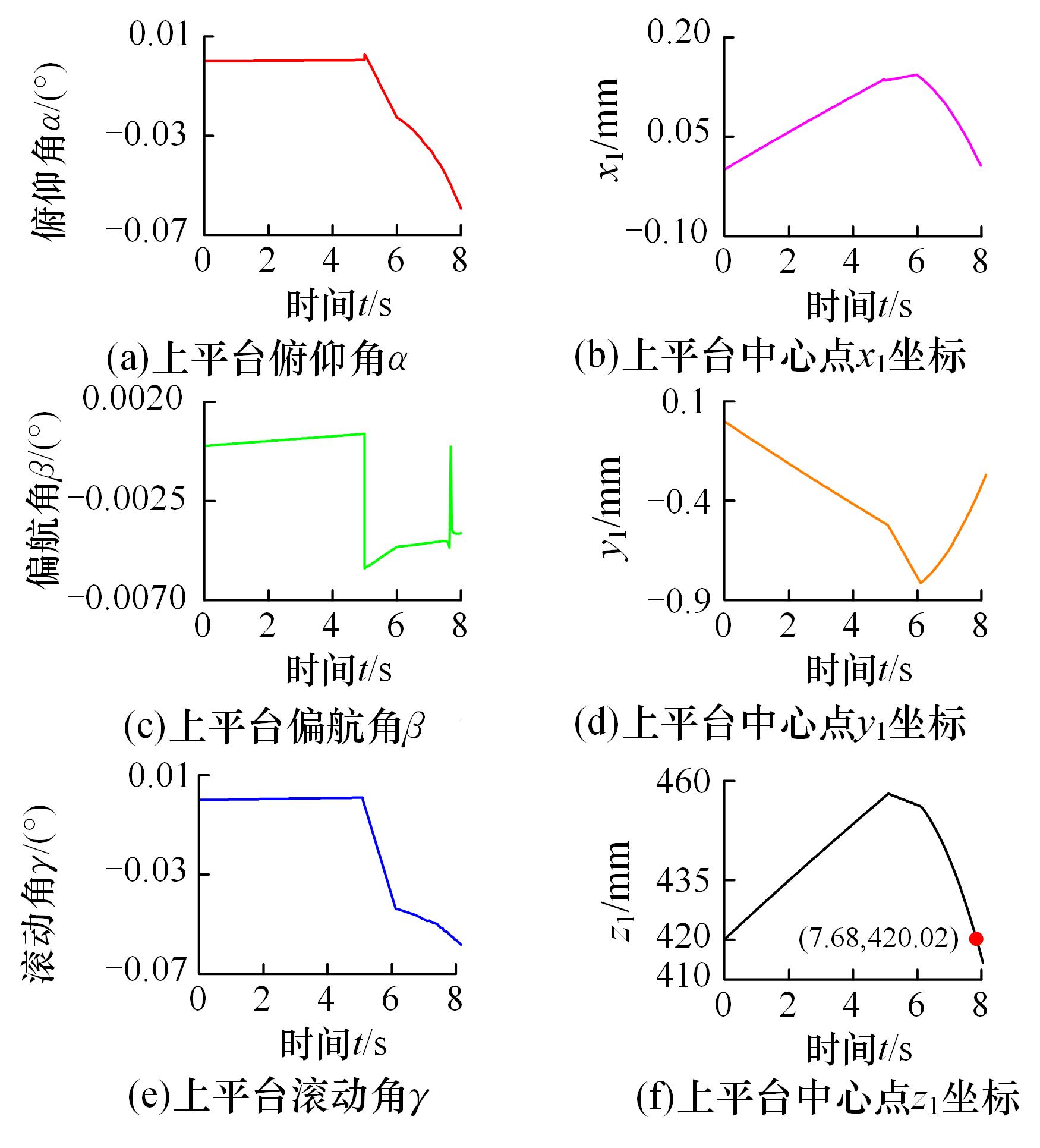
Fig.25 Simulation of 3R mode state switching
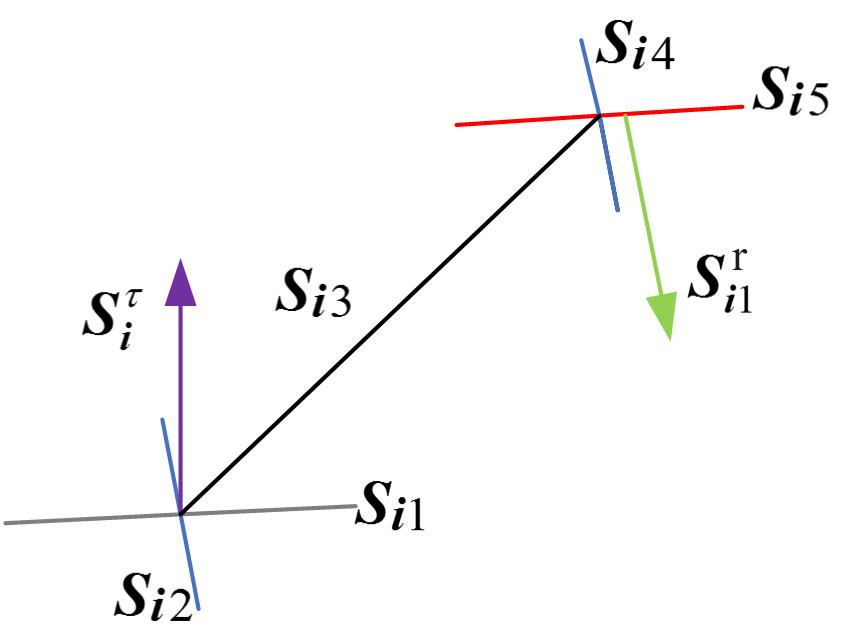
Fig 26 Constraints on the parallel limb after locked Si1
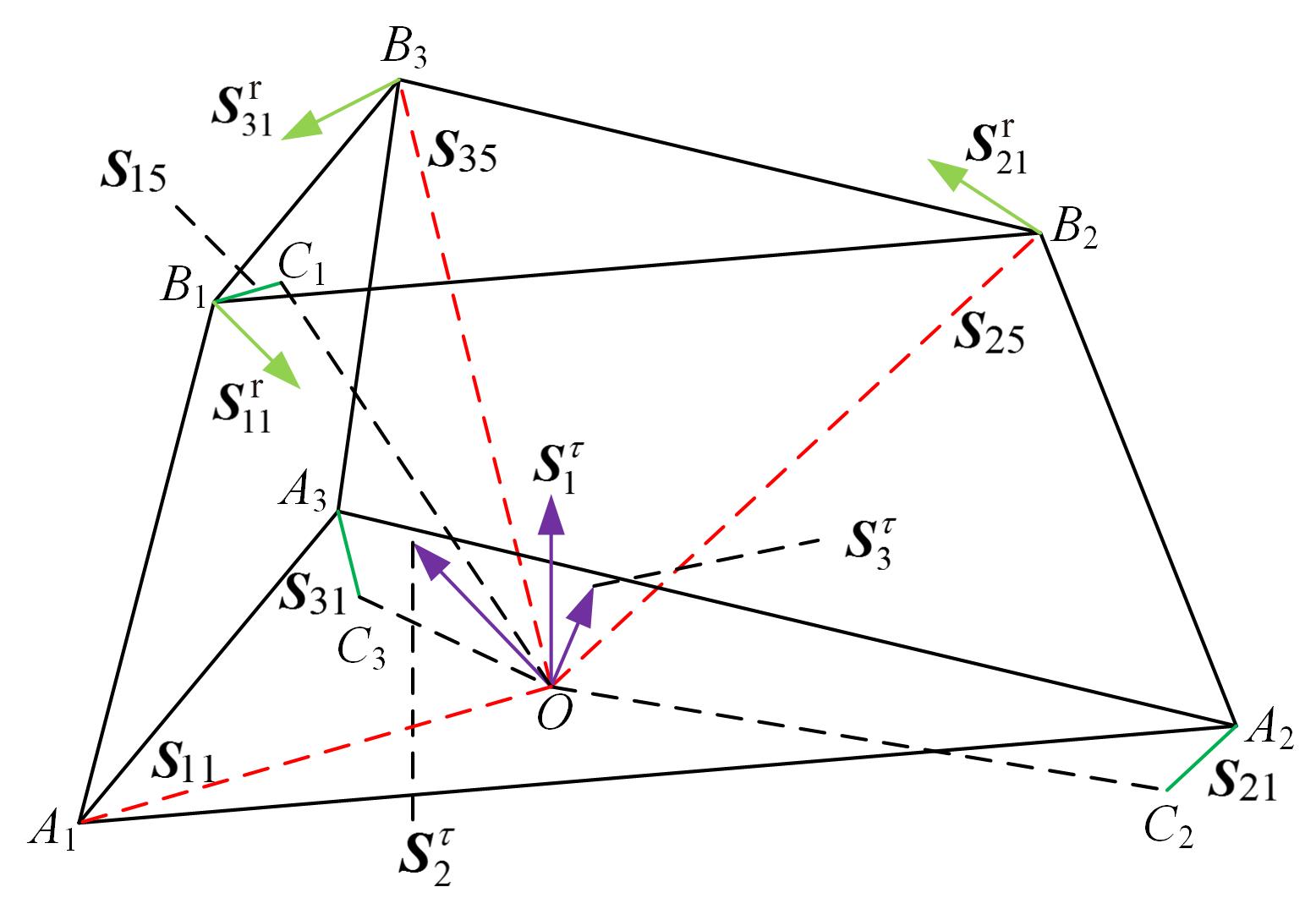
Fig.27 The 3T mode after locked Si1
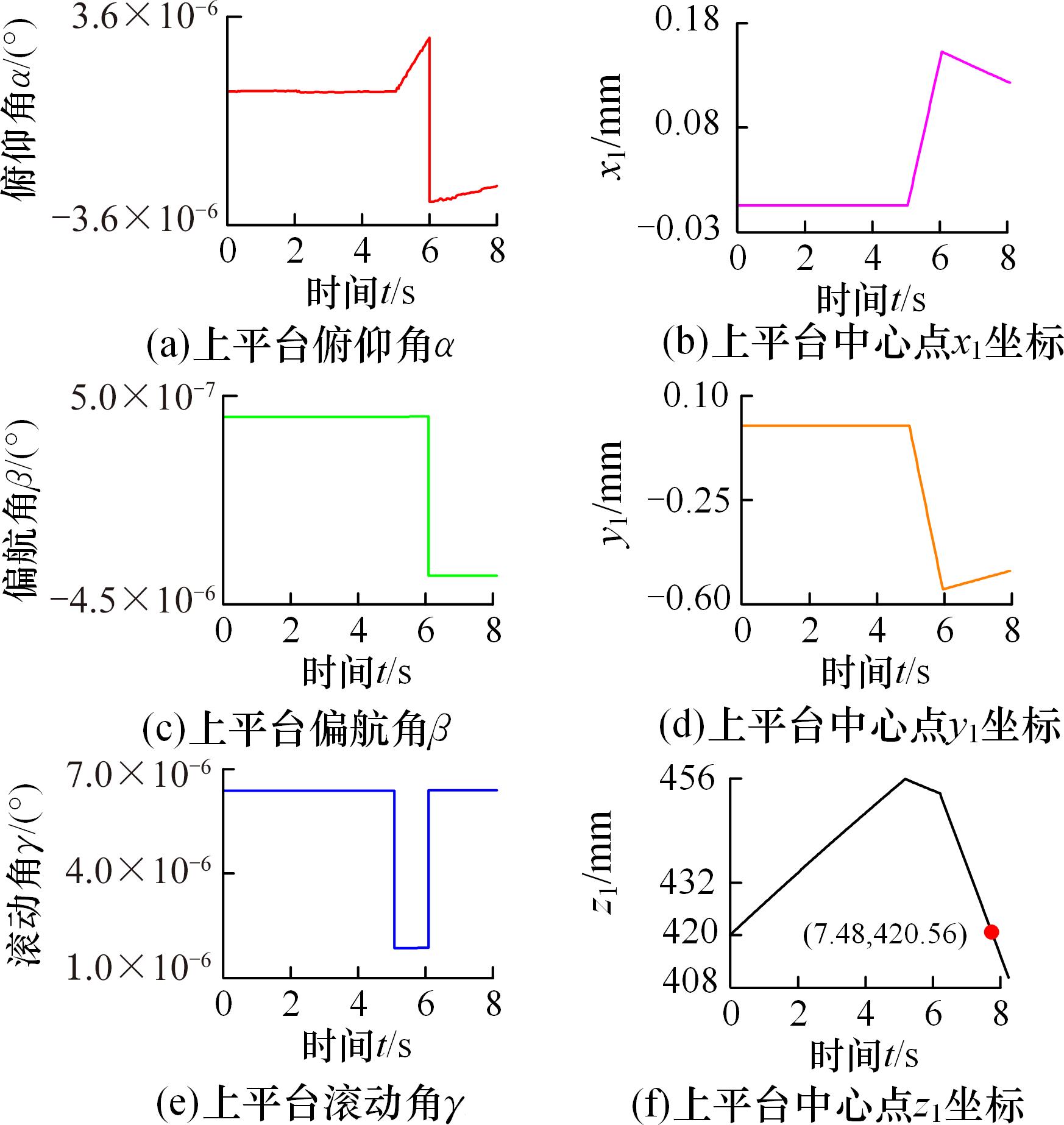
Fig.28 Simulation of 3T mode state switching
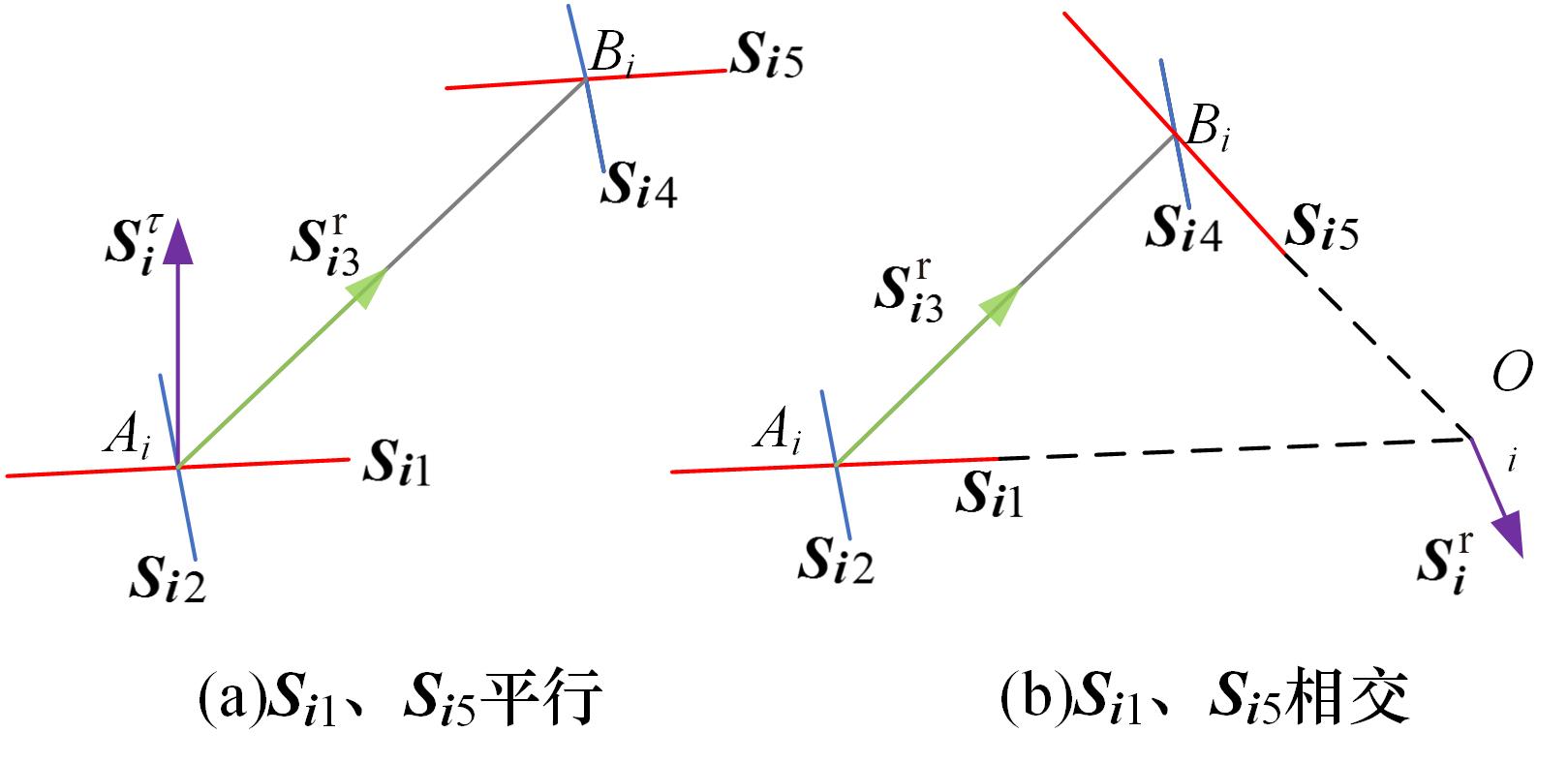
Fig.29 Constraints on the limb after locked Si3
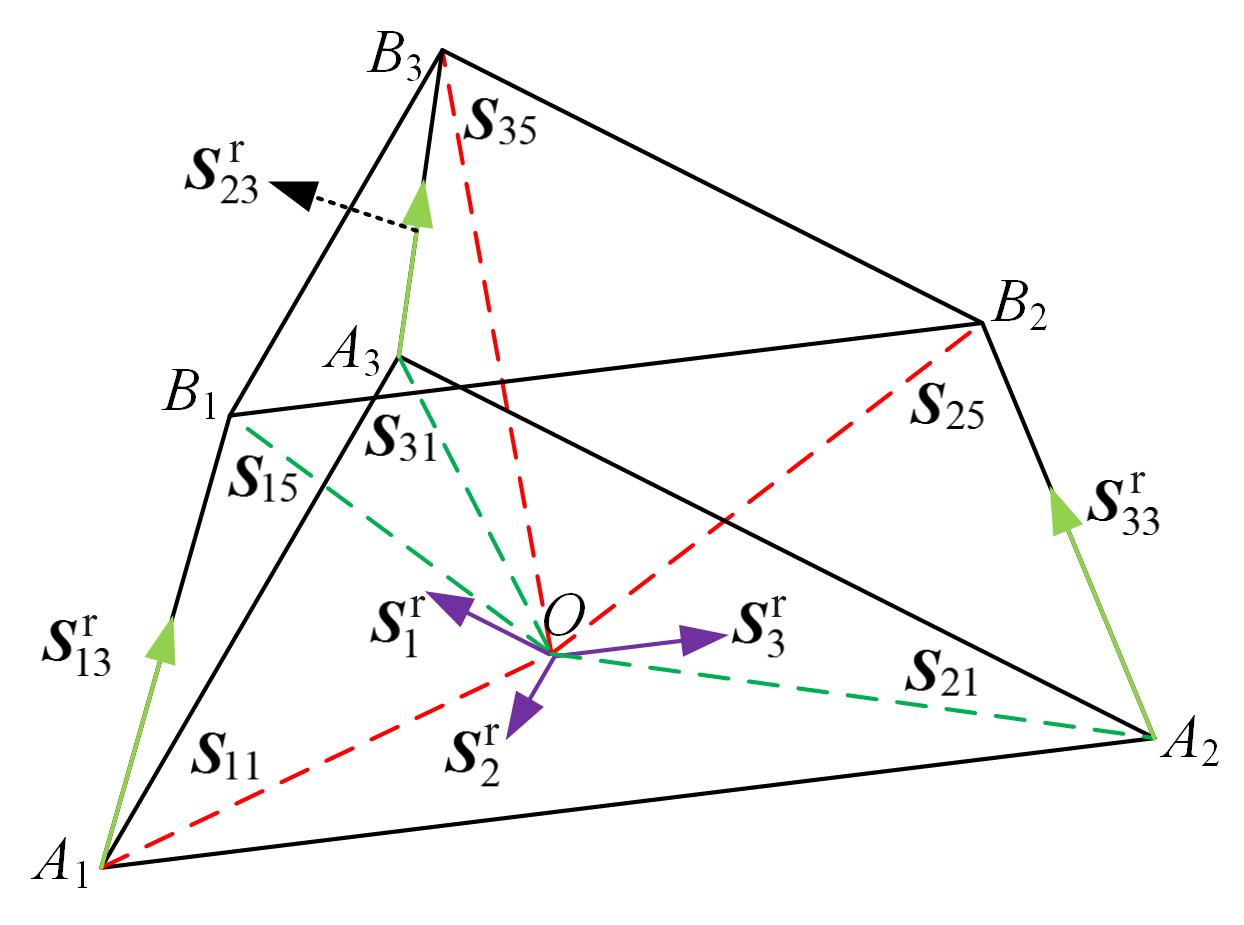
Fig.30 The 3R mode after locked Si3
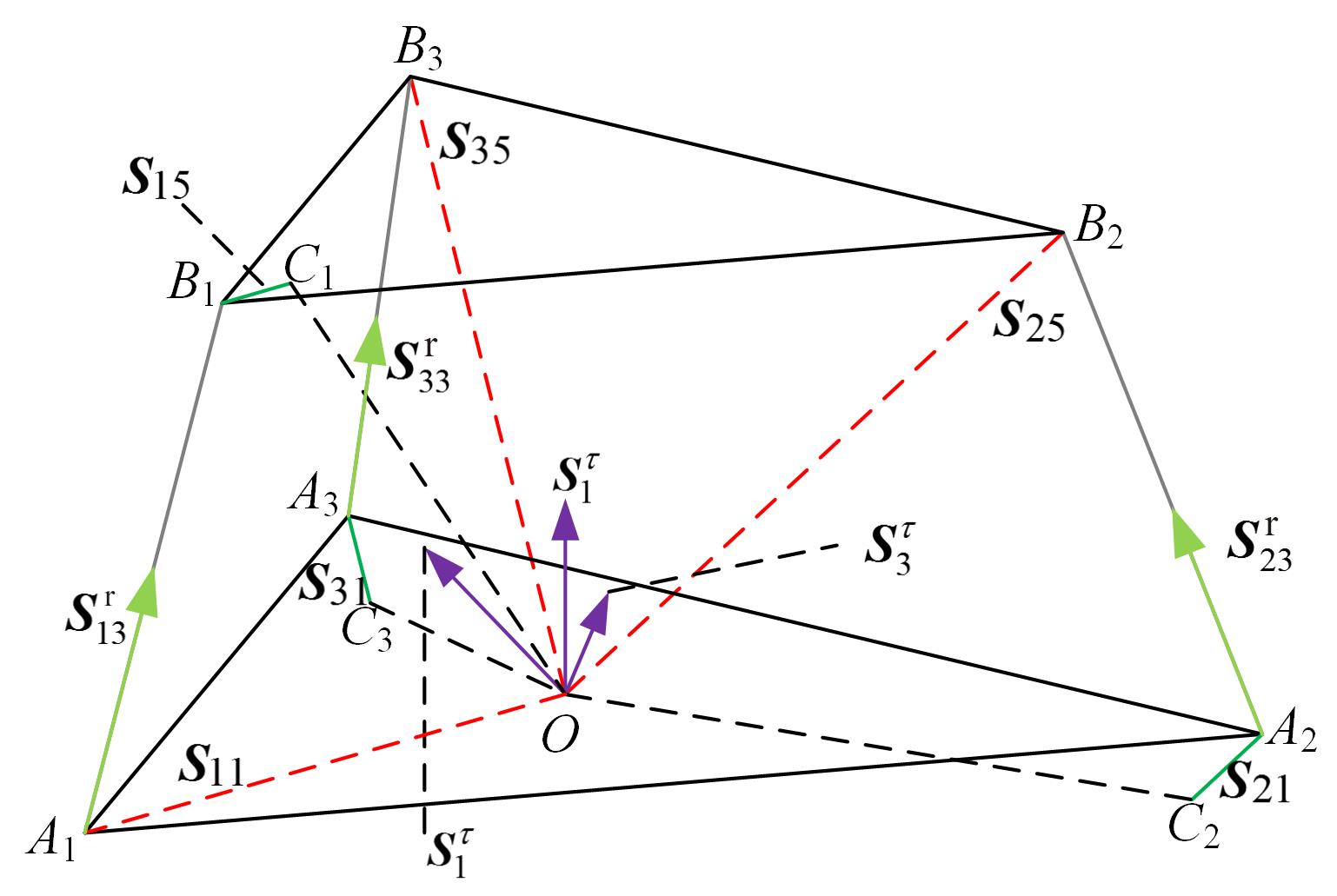
Fig.31 The 3T mode after locked Si3
Fig.32 The Mode switching simulation
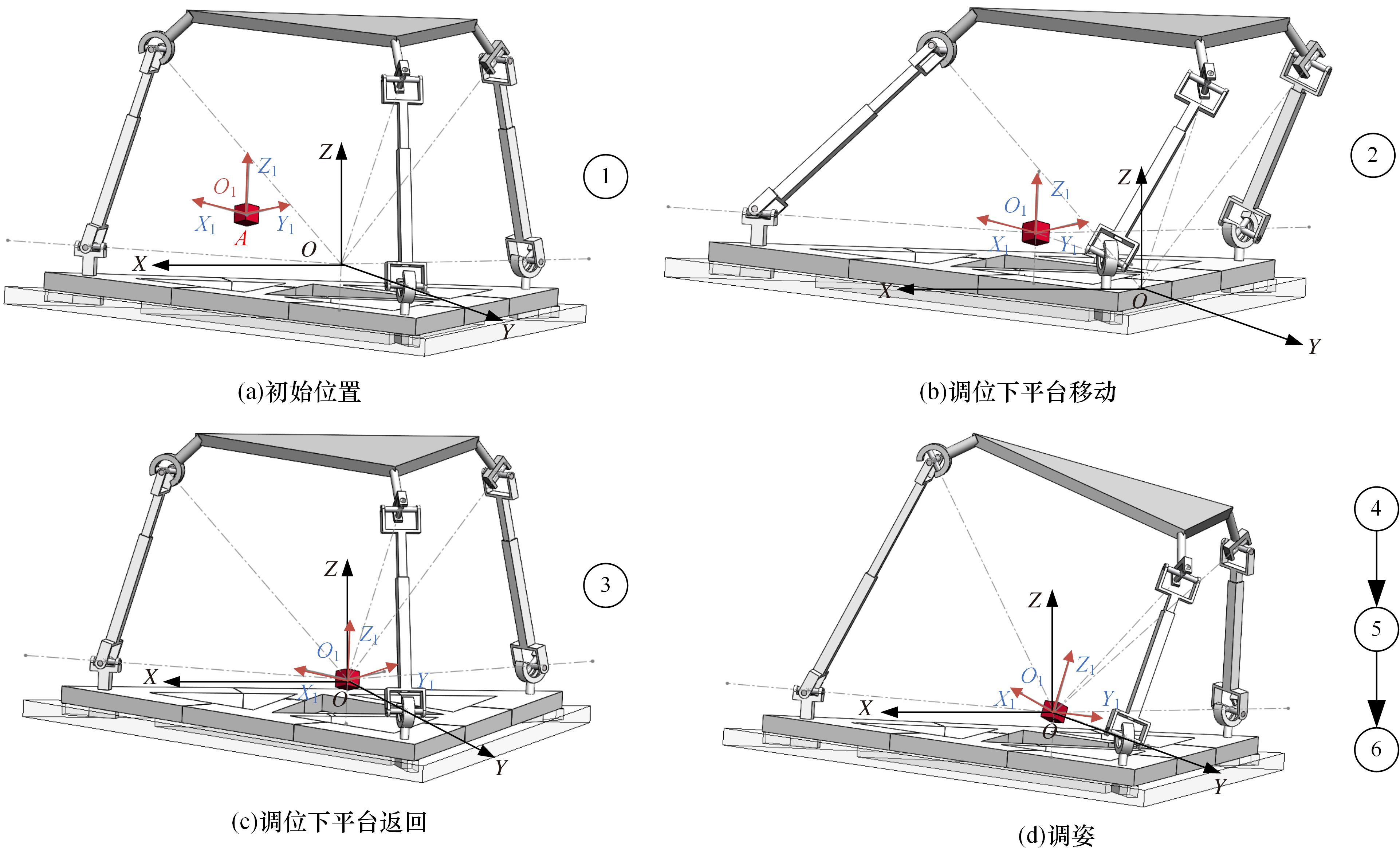
Fig.33 Application of the metamorphic mechanisms
| [1] | 康熙, 戴建生. 机构学中机构重构的理论难点与研究进展——变胞机构演变内涵、分岔机理、设计综合及其应用[J]. 中国机械工程, 2020, 31(1): 57-71. |
| KANG Xi, DAI Jiansheng. Theoretical Difficulties and Research Progresses of Mechanism Reconfiguration in Mechanisms—Evolution Connotation, Furcation Principle, Design Synthesis and Application of Metamorphic Mechanisms[J]. China Mechanical Engineering, 2020, 31(1): 57-71. | |
| [2] | 张磊, 王延杰, 唐刚强, 等. 基于变胞机构的移动机器人构型设计研究综述[J]. 信息与控制, 2022, 51(1): 12-22. |
| ZHANG Lei, WANG Yanjie, TANG Gangqiang, et al. Review of Configurational Design of Mobile Robot Based on Metamorphic Mechanism[J]. Information and Control, 2022, 51(1): 12-22. | |
| [3] | 于靖军, 刘凯, 孔宪文. 多模式机构研究进展[J]. 机械工程学报, 2020, 56(19): 14-27. |
| YU Jingjun, LIU Kai, KONG Xianwen. State of the Art of Multi-mode Mechanisms[J]. Journal of Mechanical Engineering, 2020, 56(19): 14-27. | |
| [4] | LI Ju, WU Guanglei, SHEN Huiping, et al. Topology of Robotic Mechanisms: Framework and Mathematics Methods-in Conjunction with a Review of Four Original Theories[J]. Mechanism and Machine Theory, 2022, 175: 104895. |
| [5] | 周杨, 畅博彦, 金国光, 等. 面向变胞机构动力学建模的变拓扑构型数学描述方法[J]. 机械工程学报, 2022, 58(9): 49-61. |
| ZHOU Yang, CHANG Boyan, JIN Guoguang, et al. Mathematic Description Method of Variable Topology Configuration for Dynamic Modeling of Metamorphic Mechanism[J]. Journal of Mechanical Engineering, 2022, 58(9): 49-61. | |
| [6] | 于红英, 曾重元, 郭震. 少自由度变胞并联机构综合设计方法[J]. 哈尔滨工业大学学报, 2018, 50(1): 42-49. |
| YU Hongying, ZENG Zhongyuan, GUO Zhen. Type Synthesis Method of Lower-mobility Metamorphic Parallel Mechanism[J]. Journal of Harbin Institute of Technology, 2018, 50(1): 42-49. | |
| [7] | 王汝贵, 孙家兴, 戴建生. 基于遗传基因理论的变胞机构变胞方程研究[J]. 机械设计与研究, 2019, 35(1): 75-80. |
| WANG Rugui, SUN Jiaxing, DAI Jiansheng. Research on Metamorphic Equation of Metamorphic Mechanism Based on Genetic Gene Theory[J]. Machine Design & Research, 2019, 35(1): 75-80. | |
| [8] | GAN Dongming, DAI J S, DIAS J, et al. Reconfigurability and Unified Kinematics Modeling of a 3RTPS Metamorphic Parallel Mechanism with Perpendicular Constraint Screws[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(4): 121-128. |
| [9] | YE Wei, CHAI Xinxue, ZHANG Ketao. Kinematic Modeling and Optimization of a New Reconfigurable Parallel Mechanism[J]. Mechanism and Machine Theory, 2020, 149: 103850. |
| [10] | 贾璞, 李端玲, 雷志强, 等. 一种3(Ra)PS变胞并联机构构型与运动学分析[J]. 农业机械学报, 2022, 53(2): 443-450. |
| JIA Pu, LI Duanling, LEI Zhiqiang, et al. Configuration and Kinematics Analysis of a 3(Ra)PS Metamorphic Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(2): 443-450. | |
| [11] | 吴腾, 张武翔, 丁希仑. 一种新型并联变胞机构的设计与分析[J]. 机械工程学报, 2015, 51(7): 30-37. |
| WU Teng, ZHANG Wuxiang, DING Xilun. Design and Analysis of a Novel Parallel Metamorphic Mechanism[J]. Journal of Mechanical Engineering, 2015, 51(7): 30-37. | |
| [12] | GAN Dongming, DIAS J, SENEVIRATNE L. Unified Kinematics and Optimal Design of a 3rRPS Metamorphic Parallel Mechanism with a Reconfigurable Revolute Joint[J]. Mechanism and Machine Theory, 2016, 96: 239-254. |
| [13] | WANG Ruiqin, KANG Xi, DAI J S. A Novel Reconfigurable Spherical Joint Based on Linear Independence of Screws and Its Resultant Metamorphic Mechanisms[J]. Mechanism and Machine Theory, 2021, 164: 104351. |
| [14] | 贾璞, 李端玲, 李海源, 等. 基于变胞铰链的并联机构结构设计与构型分析[J]. 机械工程学报, 2020, 56(19): 92-102. |
| JIA Pu, LI Duanling, LI Haiyuan, et al. Structural Design and Configuration Analysis of Parallel Mechanism with Metamorphic Joint[J]. Journal of Mechanical Engineering, 2020, 56(19): 92-102. | |
| [15] | WEI Jun, DAI Jiansheng. Reconfiguration-aimed and Manifold-operation Based Type Synthesis of Metamorphic Parallel Mechanisms with Motion between 1R2T and 2R1T[J]. Mechanism and Machine Theory, 2019, 139: 66-80. |
| [16] | 畅博彦, 金国光, 戴建生. 基于变约束旋量原理的变胞机构构型综合[J]. 机械工程学报,2014,50(5): 17-25. |
| CHANG Boyan, JIN Guoguang, DAI Jiansheng. Type Synthesis of Metamorphic Mechanism Based on Variable Constraint Screw Theory[J]. Journal of Mechanical Engineering, 2014, 50(5): 17-25. | |
| [17] | YE Wei, LI Qinchuan. Type Synthesis of Lower Mobility Parallel Mechanisms: a Review[J]. Chinese Journal of Mechanical Engineering, 2019, 32(1): 13-23. |
| [18] | WEI Jun, YU Bin, LIU Chenglei, et al. Grassmann Line Geometry Based Configuration Synthesis of Equivalent UU Parallel Mechanisms with Two Virtual Center-of-motion[J]. Mechanism and Machine Theory, 2023, 181: 105208. |
| [19] | 于靖军, 刘辛军, 丁希仑, 等. 机器人机构学的数学基础[M]. 北京: 机械工业出版社, 2008. |
| YU Jingjun, LIU Xinjun, DING Xilun, et al. Mathematical Basis of Robot Mechanism[M]. Beijing: China Machine Press, 2008. |
| [1] | HE Kun, ZHOU Hechao, ZHANG Jimin. Design of Negative Poisson's Ratio Metamaterial Filling Structures for Train Anti-climb Energy Absorbers [J]. China Mechanical Engineering, 2025, 36(12): 3040-3046. |
| [2] | WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2885-2893. |
| [3] | Wuchao CHEN, Xiangdong YU, Kun HE, Jimin ZHANG. Load Carrying Characteristics of Permanent Magnetic Thrust Bearings with Modularized Multi-cellular Elements [J]. China Mechanical Engineering, 2025, 36(10): 2300-2305. |
| [4] | Ningning HUANG, Jingjing YOU, Pengda YE, Huiping SHEN, Chenggang LI, Hongtao WU. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(09): 1951-1960. |
| [5] | Zhiwei ZHOU, Jian GAO, Lanyu ZHANG. A Model-free Cross-coupling Control Method for Parallel Kinematic Mechanisms with Symmetric Structure [J]. China Mechanical Engineering, 2025, 36(08): 1691-1699. |
| [6] | Ju LI, Yue GUO, Huiping SHEN, Qinmei MENG, Xiaoyang GU. Optimization Principle and General Method for Multiple Topology Decoupling of Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(08): 1700-1712. |
| [7] | Yonggang HUANG, Dan XIE. Curvature Parameterization Model for Variable Cross-section Euler Beams under Large Deflection [J]. China Mechanical Engineering, 2025, 36(08): 1757-1766. |
| [8] | ZHANG Guangshuai, SUN Liangbo, LIU Xiaocui, ZHANG Deping, ZHOU Huaxi. Isomorphism Identification Method for Kinematic Chain Based on Exchange and Comparison of Lower Triangular Matrix with Whole Information [J]. China Mechanical Engineering, 2025, 36(06): 1178-1187,1221. |
| [9] | ZHAO Shunqing1, WENG Mingze2, WU Jianxu1, YAO Yanan1. Design and Obstacle-surmounting Performance Analysis of an Integrated Reconfigurable Closed-chain Leg Mechanism [J]. China Mechanical Engineering, 2025, 36(01): 47-58. |
| [10] | CHEN Xiulong, WANG Aiguo, WANG Jingqing. Dynamics Optimization Design of Multi-link Mechanisms with Lubrication Clearances of Revolute Joints [J]. China Mechanical Engineering, 2025, 36(01): 87-95. |
| [11] | HU Bo1, 2, ZHAO Jinjun1, 2, LIU Jianzheng1, 2, ZONG Hongyi1, 2. Terminal Constraint Analysis of (3-RPS)+(2-RCR) Hybrid Mechanisms [J]. China Mechanical Engineering, 2024, 35(09): 1548-1558. |
| [12] | CHANG Boyan1, 2, GUAN Xin1, JIN Guoguang1, 2, LIANG Dong1, 2. Geometric Design and Performance Analysis of Multi-closed-loop Deployable Honeycomb Mechanisms with Thick Panels [J]. China Mechanical Engineering, 2024, 35(07): 1156-1167. |
| [13] | TIAN Liyong1, TANG Rui1, YU Ning1, YANG Xiuyu1, 2, QIN Wenguang3. Study and Application of Roller Replacement Robots with Non-stopping for Belt Conveyors [J]. China Mechanical Engineering, 2024, 35(05): 938-949. |
| [14] | HU Bo, AN Jinyun, YIN Lairong, ZHOU Changjiang. Calculation Method of Time-varying Meshing Stiffness of Small Module Gear Transmissions [J]. China Mechanical Engineering, 2024, 35(01): 74-82. |
| [15] | WANG Qiliang, LIU Tong, LI Yongqi, WEI Jianming, XU Meijuan, HONG Yongfeng. Topology Optimization Design of Flexible Parallel Microgrippers with Low Parasitic Displacements [J]. China Mechanical Engineering, 2023, 34(21): 2577-2584,2591. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||