ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (8): 1700-1712.DOI: 10.3969/j.issn.1004-132X.2025.08.006
Ju LI( ), Yue GUO, Huiping SHEN(), Qinmei MENG, Xiaoyang GU
), Yue GUO, Huiping SHEN(), Qinmei MENG, Xiaoyang GU
Received:2024-07-18
Online:2025-08-25
Published:2025-09-18
Contact:
Huiping SHEN
李菊(), 郭跃, 沈惠平(), 孟庆梅, 顾晓阳
通讯作者:
沈惠平
作者简介:李 菊,女,1981 年生,副教授、博士。研究方向为并联机器人、机电一体化等。 E-mail:wangju0209@163.com。基金资助:CLC Number:
Ju LI, Yue GUO, Huiping SHEN, Qinmei MENG, Xiaoyang GU. Optimization Principle and General Method for Multiple Topology Decoupling of Parallel Mechanisms[J]. China Mechanical Engineering, 2025, 36(8): 1700-1712.
李菊, 郭跃, 沈惠平, 孟庆梅, 顾晓阳. 并联机构多重拓扑降耦的优化原理与一般方法[J]. 中国机械工程, 2025, 36(8): 1700-1712.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.08.006
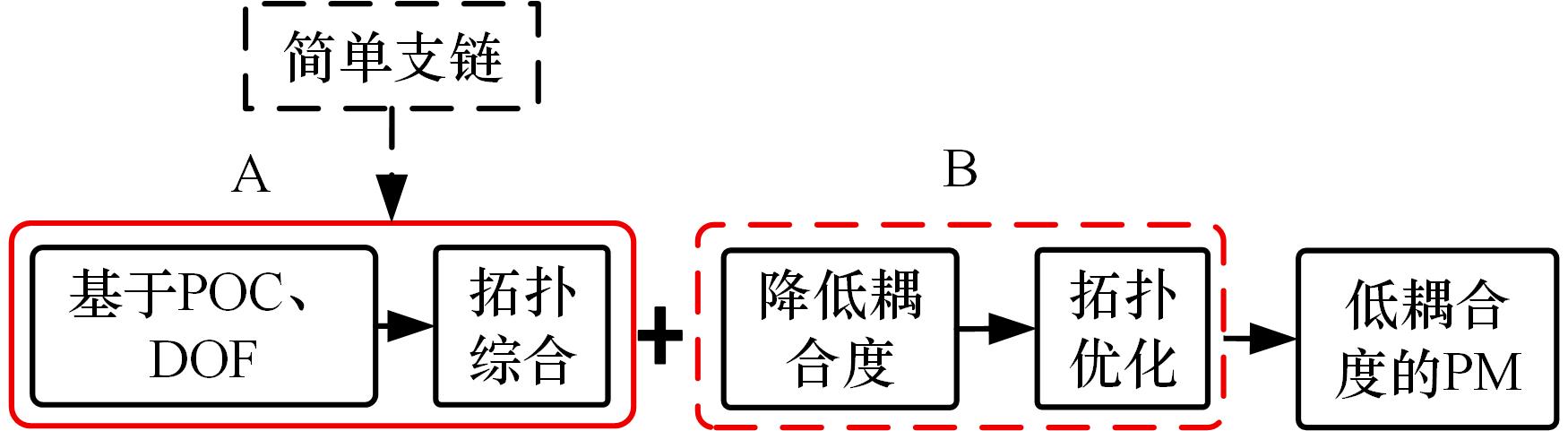
Fig.1 Topological synthesis and topological decoupling optimization of parallel mechanisms
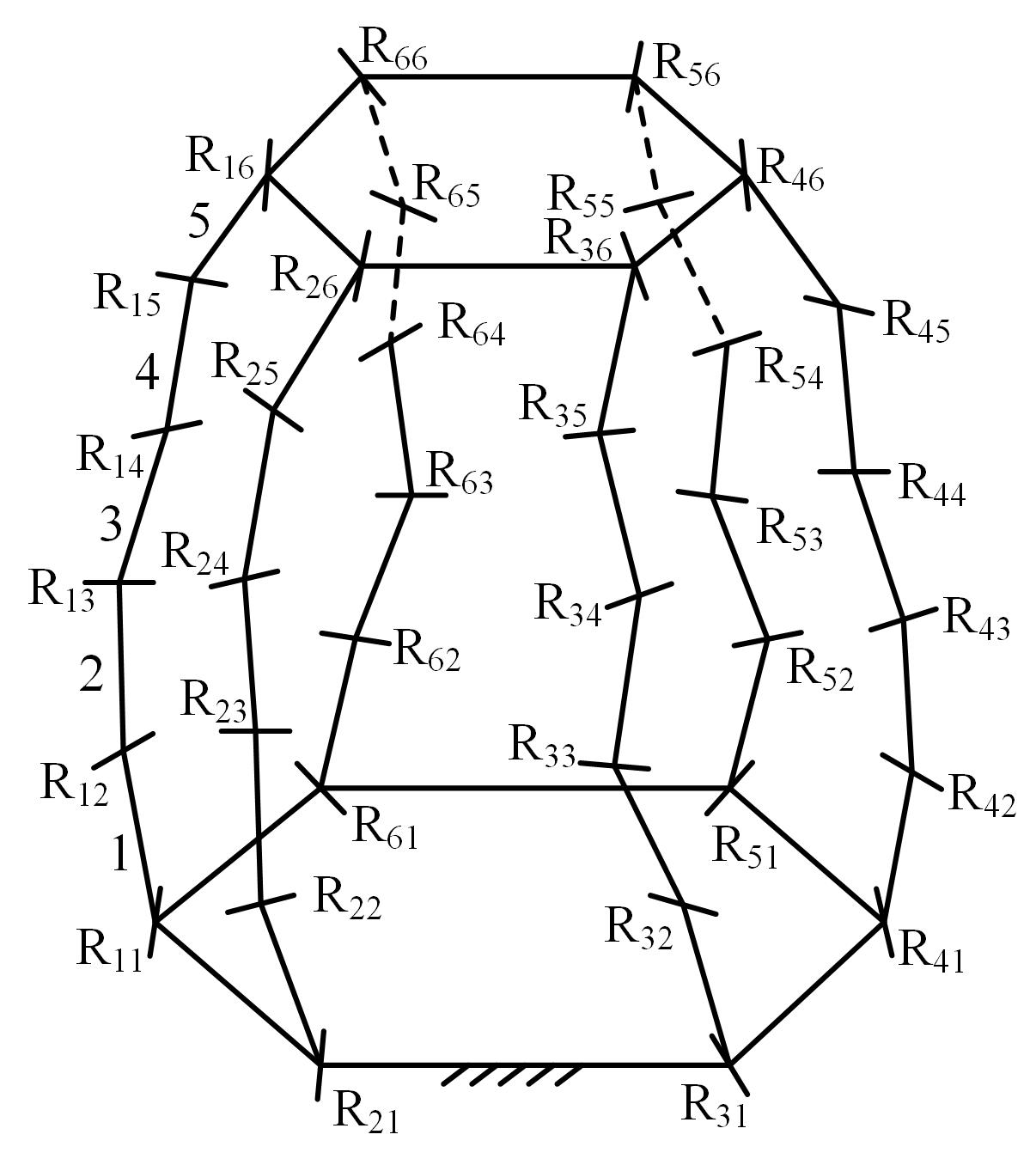
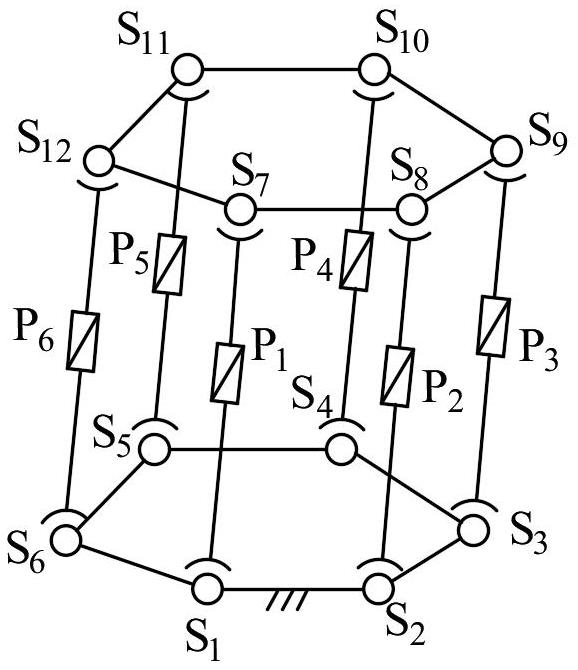
Fig.2 6-6R mechanism (k=4)
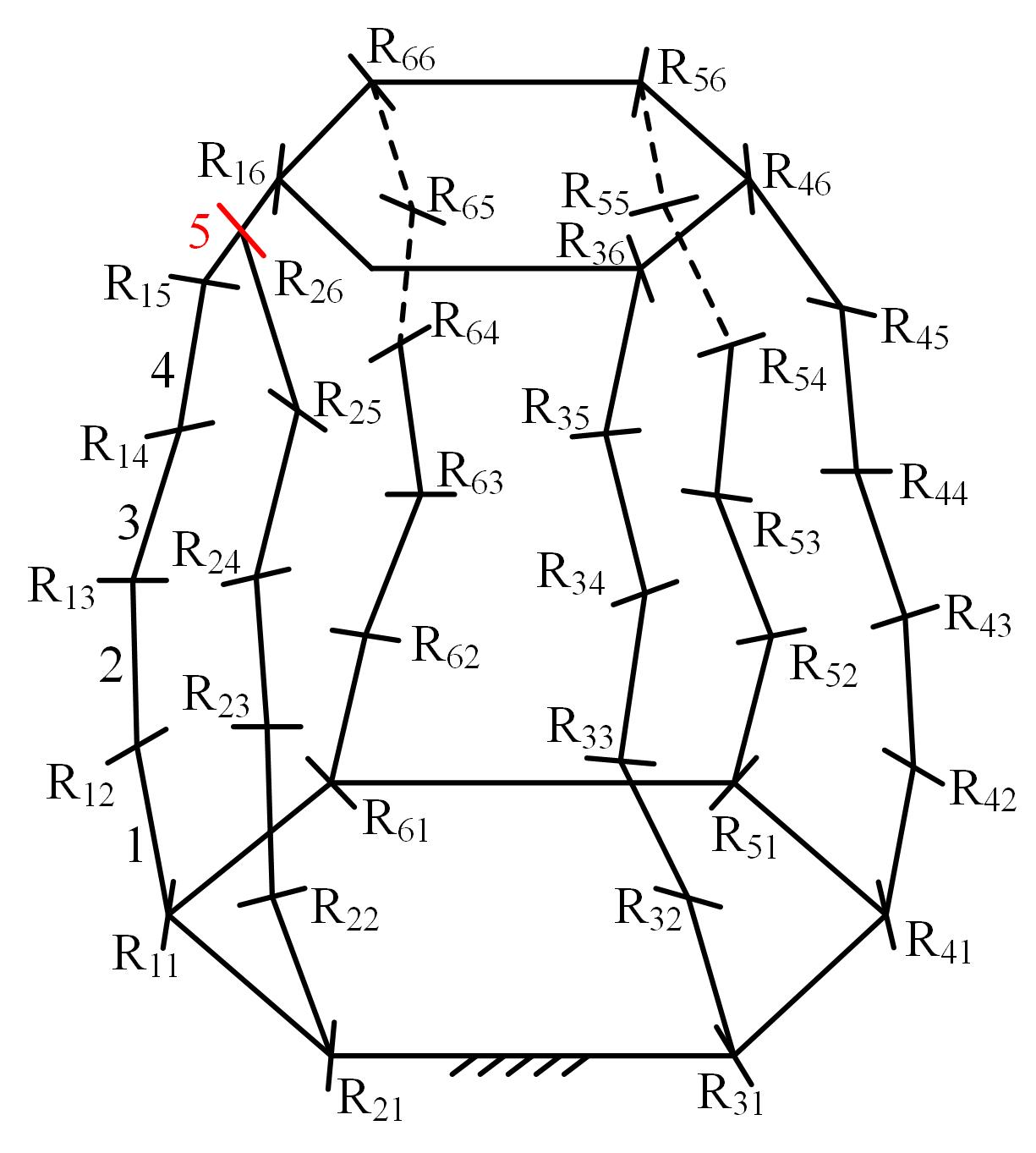
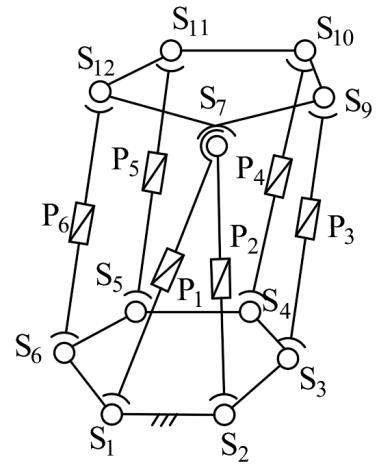
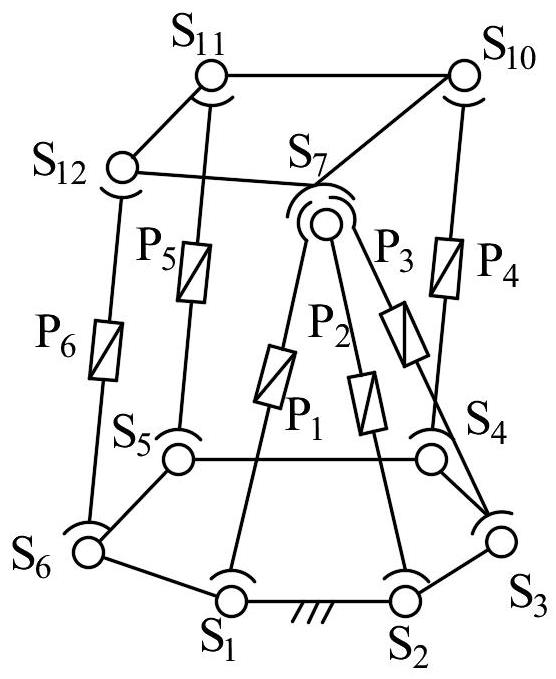
Fig.3 Primary decoupling: (HSOC2)+4R mechanism (k=3)
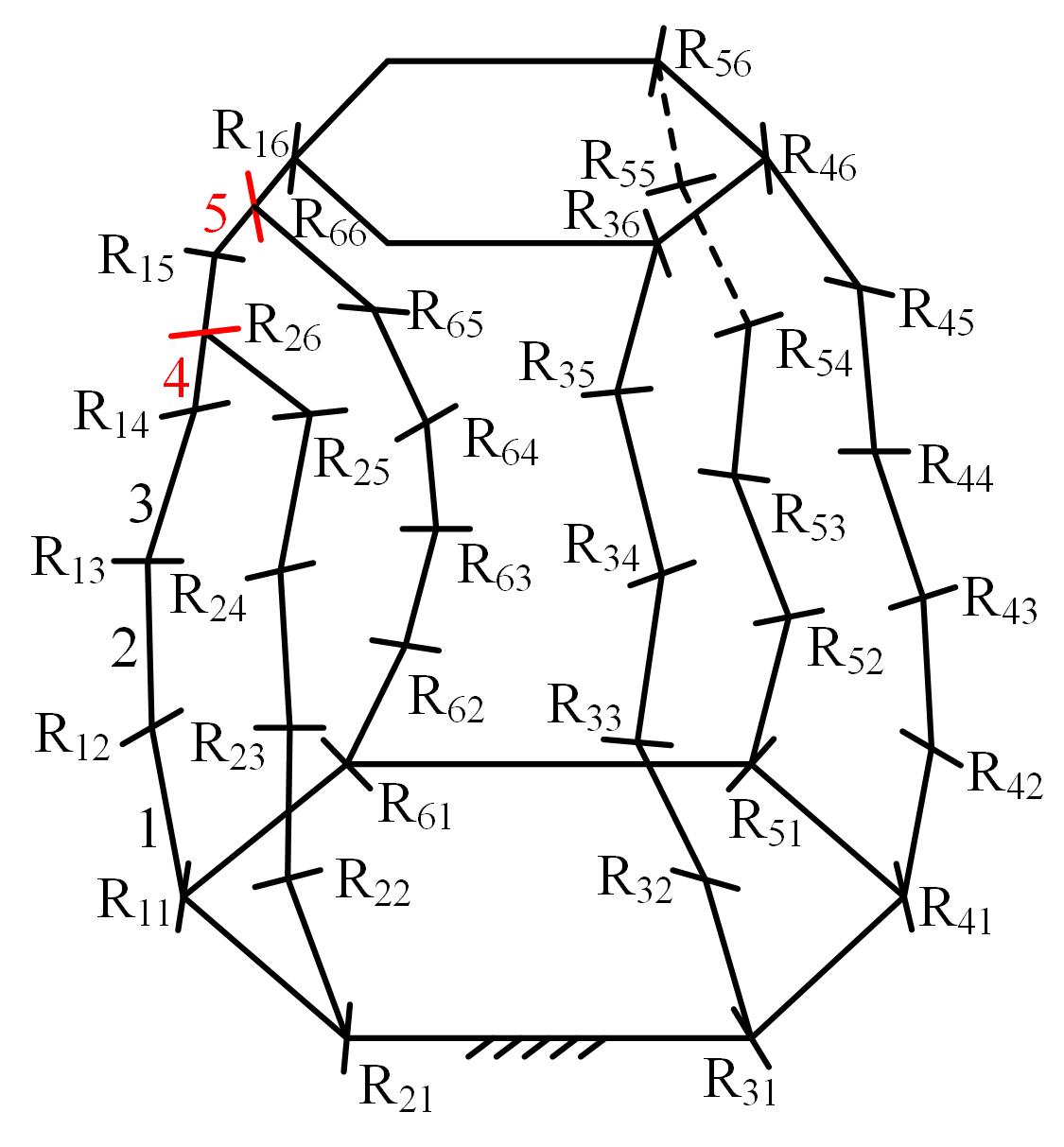
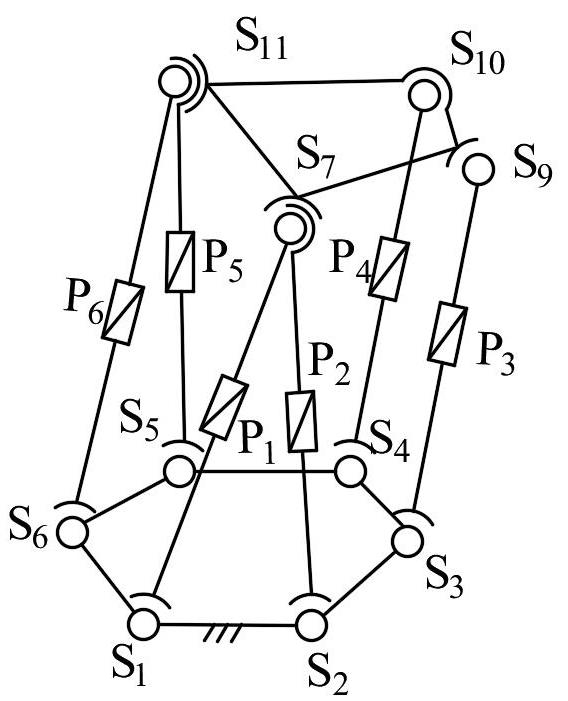
Fig.4 Secondary decoupling: (HSOC3)+3R mechanism (k=2)
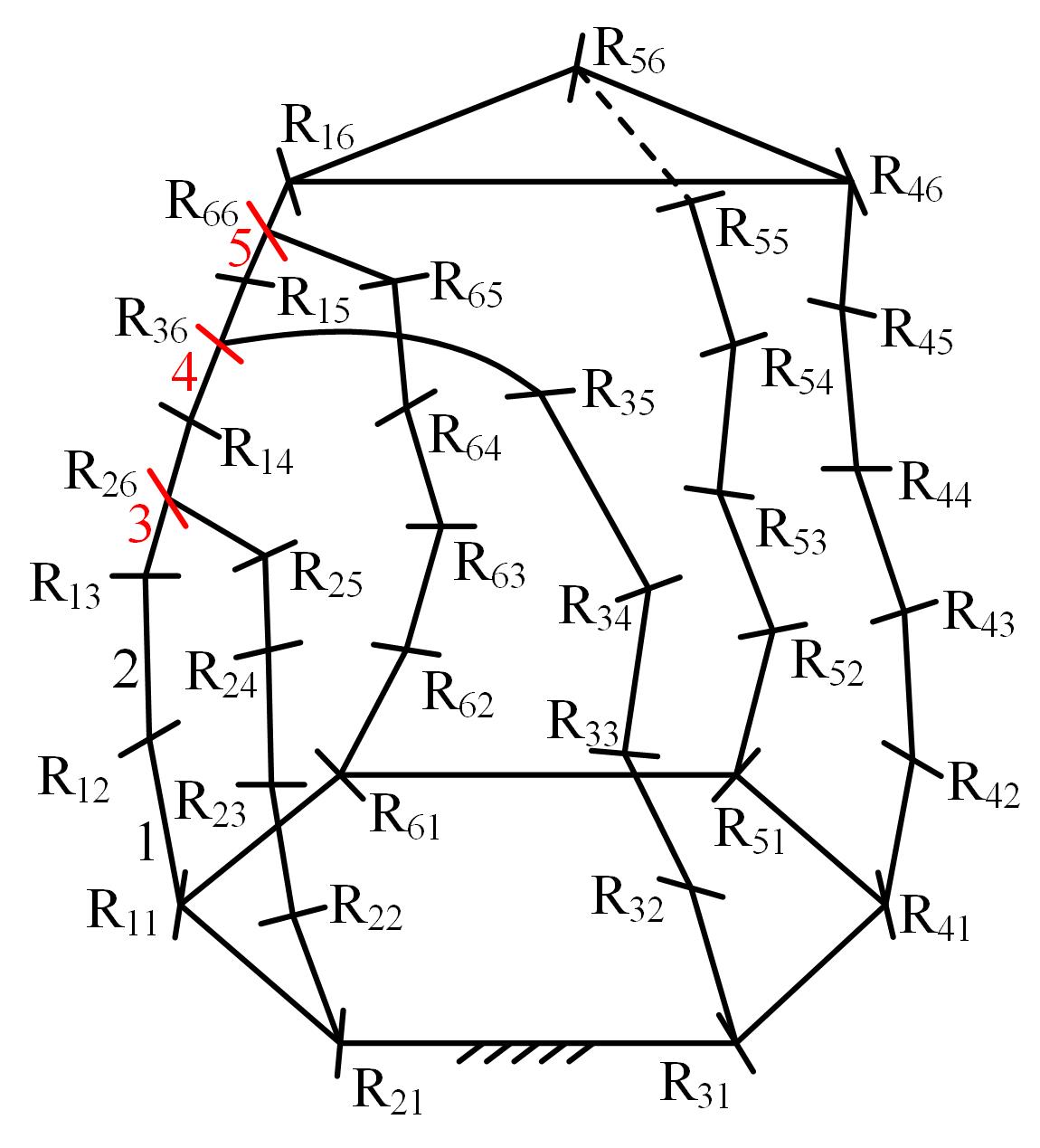
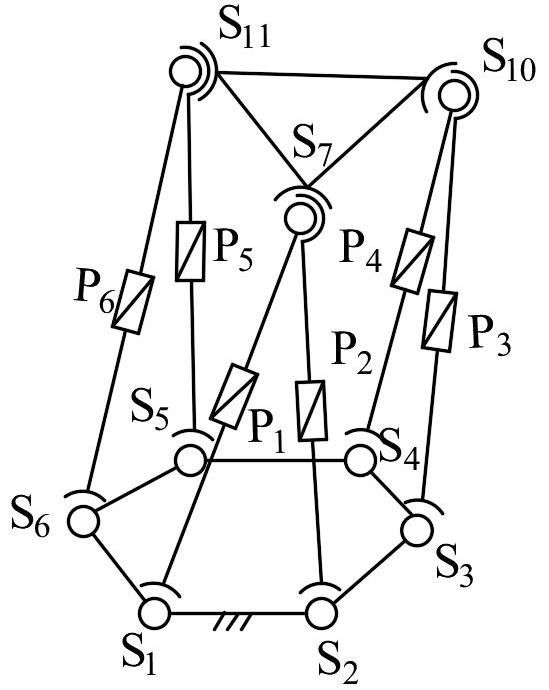
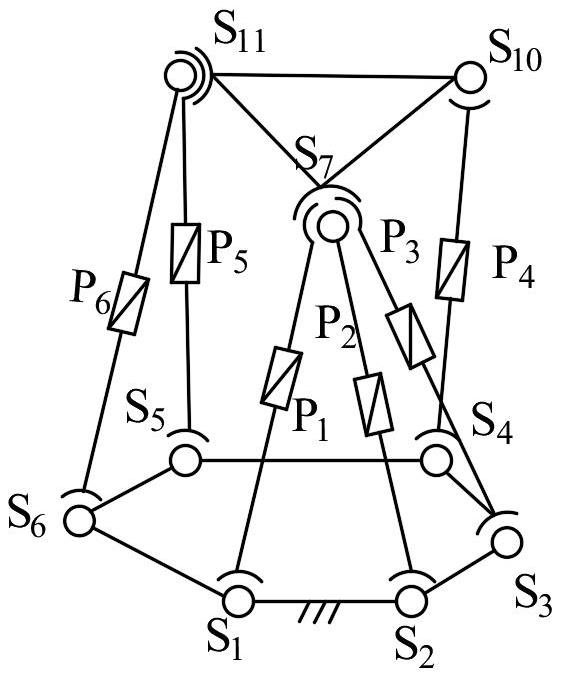
Fig.5 Tertiary decoupling: (HSOC4)+2R parallel mechanism(k=1)
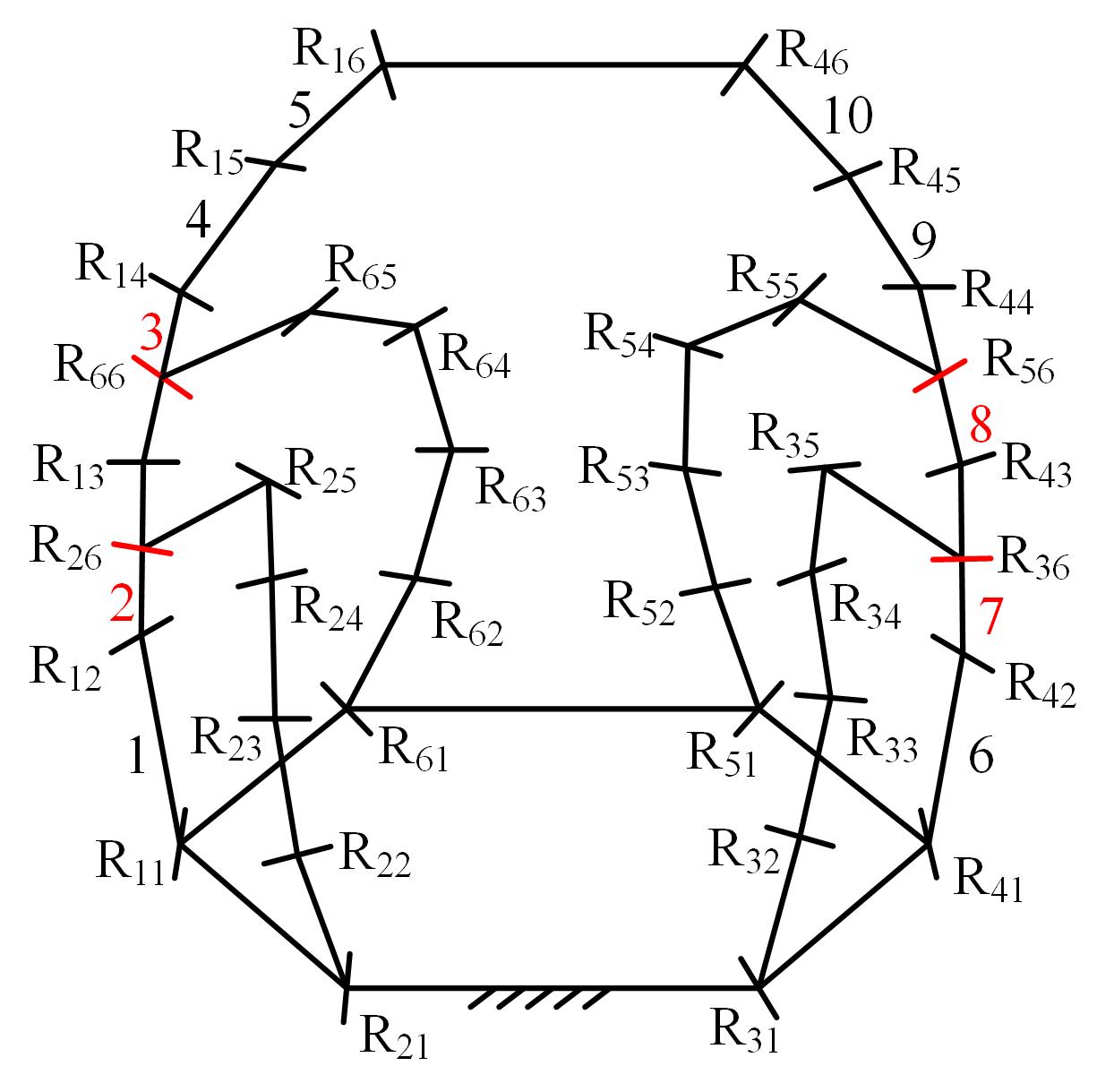
Fig.6 Quaternary decoupling: (HSOC3)+(HSOC3) parallel mechanism(k=0)
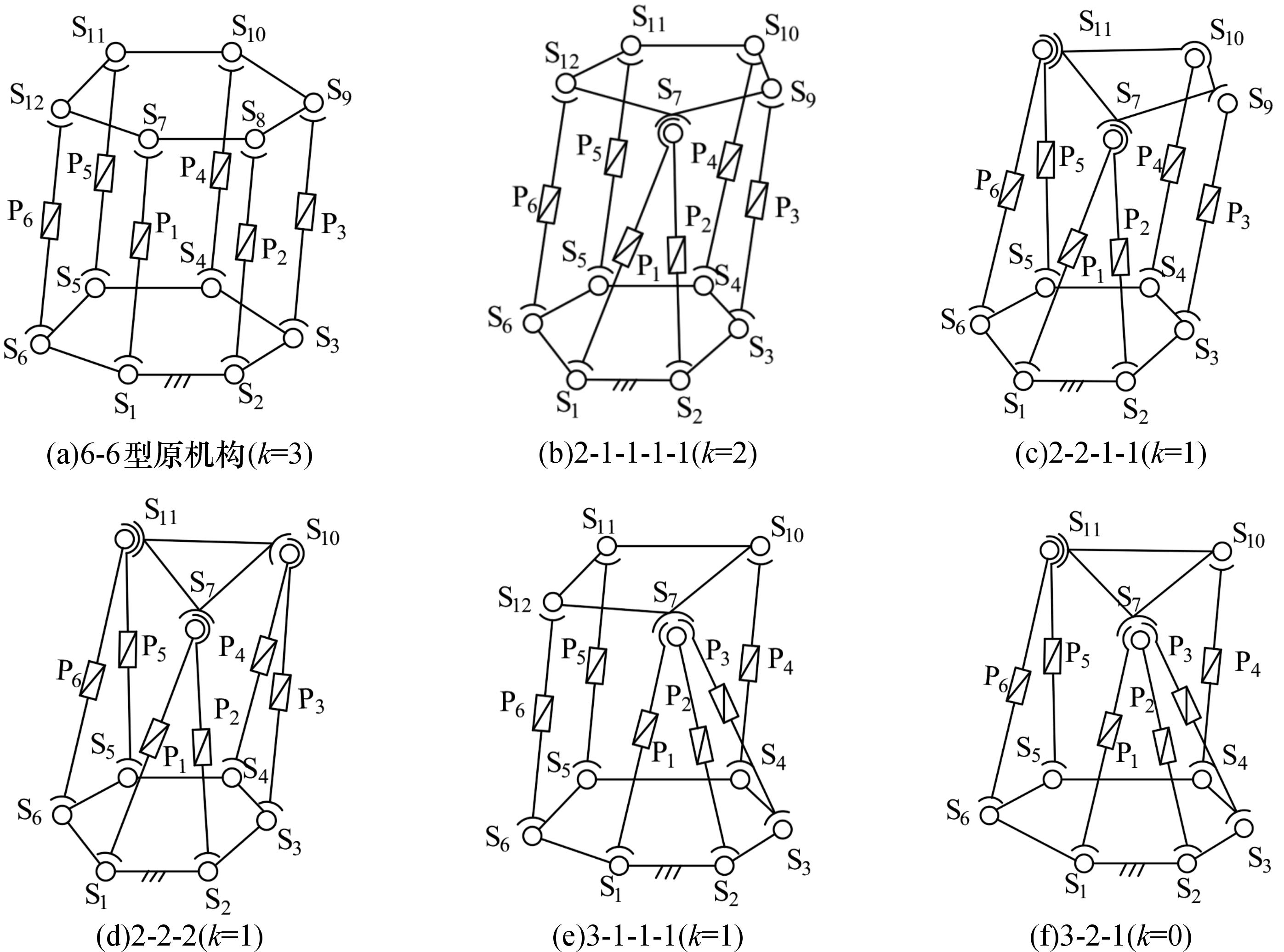
Fig.7 Typical 6-DOF Stewart-Gough mechanism and its topological decoupling optimization
| 6-6型 | 6-5型 2-1-1-1-1式 | 6-4型 2-2-1-1式 | 6-4型 2-2-2式 | 6-4型 3-1-1-1式 | 6-3型 3-2-1式 | |
|---|---|---|---|---|---|---|
机 构 简 图 |
No.a |
No.b |
No.c |
No.d |
No.e |
No.f |
| k | 3 | 2 | 1 | 1 | 1 | 0 |
| 解耦性 | 无运动解耦性 | 位置-姿态分离:有运动解耦性 | ||||
Tab.1 Derivative mechanisms of 6-SPS parallel mechanism via topological decoupling and coupling degrees k
| 6-6型 | 6-5型 2-1-1-1-1式 | 6-4型 2-2-1-1式 | 6-4型 2-2-2式 | 6-4型 3-1-1-1式 | 6-3型 3-2-1式 | |
|---|---|---|---|---|---|---|
机 构 简 图 |
No.a |
No.b |
No.c |
No.d |
No.e |
No.f |
| k | 3 | 2 | 1 | 1 | 1 | 0 |
| 解耦性 | 无运动解耦性 | 位置-姿态分离:有运动解耦性 | ||||
| [1] | FRISOLI A, CHECCACCI D, SALSEDO F, et al. Synthesis by Screw Algebra of Translating In-parallel Actuated Mechanisms[M]∥Advances in Robot Kinematics. Dordrecht: Springer Netherlands, 2000: 433-440. |
| [2] | HUANG Zhen, LI Qinchuan, DING Huafeng. Theory of Parallel Mechanisms[M]. Dordrecht: Springer Netherlands, 2013. |
| [3] | HERVÉ J M. Design of Parallel Manipulators via the Displacement Group[C]∥Proc. of the 9th World Congress on the Theory of Machines and Mechanisms. Milan,1995:2079-2082. |
| [4] | LI Qinchuan, HUANG Zhen, HERVE J M. Type Synthesis of 3R2T 5-DOF Parallel Mechanisms Using the Lie Group of Displacements[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 173-180. |
| [5] | 杨廷力. 机器人机构拓扑结构学[M]. 北京: 机械工业出版社, 2004. |
| YANG Tingli. Topology Structure Design of Robot Mechanisms[M]. Beijing: China Machine Press, 2004. | |
| [6] | 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012. |
| YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology[M]. Beijing: Science Press, 2012. | |
| [7] | YANG Tingli, LIU Anxin, SHEN Huiping, et al. Topology Design of Robot Mechanisms[M]. Singapore: Springer Nature Singapore, 2018. |
| [8] | GOGU G. Structural Synthesis of Parallel Robots: Part 1: Methodology[M]. Dordrecht: Springer Netherlands, 2008. |
| [9] | 杨廷力, 沈惠平, 刘安心, 等. 机构拓扑学理论的基本思想与数学方法——从方法论角度回顾几种原创性理论与方法[J]. 机械工程学报, 2020, 56(3): 1-15. |
| YANG Tingli, SHEN Huiping, LIU Anxin, et al. Basic Ideas and Mathematical Methods of Mechanism Topology Theory—Review of Several Original Mechanism Topology Theories in a Methodological Perspective[J]. Journal of Mechanical Engineering, 2020, 56(3): 1-15. | |
| [10] | LI Ju, WU Guanglei, SHEN Huiping, et al. Topology of Robotic Mechanisms: Framework and Mathematics Methods – in Conjunction with a Review of Four Original Theories[J]. Mechanism and Machine Theory, 2022, 175: 104895. |
| [11] | KONG Xianwen, GOSSELIN C. Type Synthesis of Parallel Mechanisms[M]. Heidelberg: Springer, 2007. |
| [12] | 高峰, 杨加伦, 葛巧德. 并联机器人型综合的GF集理论[M]. 北京: 科学出版社, 2011. |
| GAO Feng, YANG Jialun, GE Qiaode. GF set theory of parallel robot type synthesis [M]. Beijing: Science Press, 2011. | |
| [13] | 沈惠平, 朱小蓉, 尹洪波, 等. 并联机构的结构降耦原理及其设计方法[J]. 机械工程学报, 2016, 52(23): 102-113. |
| SHEN Huiping, ZHU Xiaorong, YIN Hongbo, et al. Principle and Design Method for Structure Coupling-reducing of Parallel Mechanisms[J]. Journal of Mechanical Engineering, 2016, 52(23): 102-113. | |
| [14] | 沈惠平. 机器人机构拓扑特征运动学[M]. 北京: 高等教育出版社, 2021. |
| SHEN Huiping. Topological Characteristics-based Kinematics for Robotic Mechanisms[M]. Beijing: Higher Education Press, 2021. | |
| [15] | 伊朗) 塔吉拉德 Taghirad, Hamid D. 并联机器人: 机构学与控制[M]. 刘山,译.北京: 机械工业出版社, 2018. |
| TAGHIRAD HAMID D. Parallel Robots: Mechanics and Control[M]. LIU Shan,Trans.Beijing: China Machine Press, 2018. | |
| [16] | 沈惠平, 尹洪波, 王振, 等. 基于拓扑结构分析的求解6-SPS并联机构位置正解的研究[J]. 机械工程学报, 2013, 49(21): 70-80. |
| SHEN Huiping, YIN Hongbo, WANG Zhen, et al. Research on Forward Position Solutions for 6-SPS Parallel Mechanisms Based on Topology Structure Analysis[J]. Journal of Mechanical Engineering, 2013, 49(21): 70-80. | |
| [17] | SHEN H P, YANG L J, MENG Q M, et al. Topological Structure Coupling-reducing of Parallel Mechanisms[C]∥Proceedings of the 14th IFToMM World Congress. Taipei, 2015: 348-357. |
| [18] | 杨廷力. 机械系统基本理论结构学·运动学·动力学[M]. 北京: 机械工业出版社, 1996. |
| YANG Tingli. Basic Theory of Mechanical System[M]. Beijing: China Machine Press, 1996. | |
| [19] | 沈惠平, 李菊, 朱小蓉, 等. 基于最优路径的并联机构自由度计算方法及其新公式[J]. 机械工程学报, 2024, 60(19): 40-52. |
| SHEN Huiping, LI Ju, ZHU Xiaorong, et al. New Method and Formula for Degree-of-freedom Calculation of Parallel Mechanism Based on Optimal Paths[J]. Journal of Mechanical Engineering, 2024, 60(19): 40-52. | |
| [20] | SELIG J M. Geometrical Methods in Robotics[M]. New York: Springer New York, 1996. |
| [21] | 黄真, 孔令富,方跃法. 并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997. |
| HUANG Zhen. Mechanism Theory and Control of Parallel Robot[M]. Beijing: China Machine Press, 1997. | |
| [22] | 刘辛军, 谢福贵, 汪劲松. 并联机器人机构学基础[M]. 北京: 高等教育出版社, 2018. |
| LIU Xinjun, XIE Fugui, WANG Jinsong. Fundamental of Parallel Robotic Mechanisms[M]. Beijing: Higher Education Press, 2018. | |
| [23] | WU Guanglei, SHEN Huiping. Parallel PnP Robots: Parametric Modeling, Performance Evaluation and Design Optimization[M]. Singapore: Springer Singapore, 2021. |
| [24] | 沈惠平, 李菊, 王振, 等. 基于结构降耦和运动解耦的并联机构拓扑结构优化及其性能改善[J]. 机械工程学报, 2017, 53(19): 176-186. |
| SHEN Huiping, LI Ju, WANG Zhen, et al. Topology Structure Optimization and Performance Improvement for Parallel Mechanisms Based on Structure Coupling-reducing and Motion Decoupling[J]. Journal of Mechanical Engineering, 2017, 53(19): 176-186. | |
| [25] | 许正骁. 三平移一转动并联操作手的设计与运动学、刚度及动力学分析[D]. 常州:常州大学,2019. |
| XU Zhengxiao. Design, Kinematic, Stiffness and Dynamic Analysis of a 3-Translational-1-Rotational Parallel Manipulator [D]. Changzhou: Changzhou University, 2019. | |
| [26] | 沈惠平, 许正骁, 许可, 等. 零耦合度且部分解耦的3T1R并联机构设计与运动分析[J]. 农业机械学报, 2019, 50(4): 382-392. |
| SHEN Huiping, XU Zhengxiao, XU Ke, et al. Design and Kinematic Analysis of Zero Coupling and Partially Decoupled 3T1R Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 382-392. | |
| [27] | 沈惠平, 许可, 杨廷力, 等. 一种零耦合度且运动解耦的新型3T1R并联操作手2-(RPa3R)3R的设计及其运动学[J]. 机械工程学报, 2019, 55(5): 53-64. |
| SHEN Huiping, XU Ke, YANG Tingli, et al. New 3T1R Parallel Manipulator 2-(RPa3R)3R with Zero Coupling Degree and Partial Decoupling: Design and Kinematics[J]. Journal of Mechanical Engineering, 2019, 55(5): 53-64. | |
| [28] | WANG Z, SHEN H P, Deng J M, et al. An Easily Manufactured 6-DOF 3-1-1-1 SPS Type Parallel Mechanism and Its Forward Kinematics[C]∥The 2nd IFToMM Symposium on Mechanism Design for Robotics. Beijing, 2012: 12-14. |
| [29] | YU Tongzhu, SHEN Huiping, DENG Jiaming, et al. An Easily Manufactured Structure and Its Analytic Solutions for Forward and Inverse Position of 1–2–3-SPS Type 6-DOF Basic Parallel Mechanism[C]∥2012 IEEE International Conference on Robotics and Biomimetics (ROBIO). Guangzhou, 2012: 1194-1199. |
| [30] | 沈惠平, 李菊, 吴广磊, 等. 并联机器人机构的拓扑结构优化[M]. 北京:高等教育出版社, 2025. |
| SHEN Huiping, LI Ju, WU Guanglei, et al. Topological Structure Optimization for Parallel Robotic Mechanism[M]. Bejing: Higher Education Press, 2025. | |
| [31] | 沈惠平. 并联机器人机构拓扑分析方法与技巧及应用[M]. 南京: 江苏凤凰教育出版社, 2025. |
| SHEN Huiping. Topological Analysis for Parallel Robotic Mechanisms[M]. Nanjing: Phoenix Education Publishing Ltd., 2025. |
| [1] | HUANG Hao1, WANG Zeng2, LI Bo2, LU Zehua1, LIU Huaiju1. Structure-thermal Compliance Collaborative Topology Optimization of Aero-engine Gears Transmission Case Based on Compromise Programming Method [J]. China Mechanical Engineering, 2025, 36(07): 1471-1478. |
| [2] | SU Ke1, WANG Ying1, LIANG Tengteng1, WEI Yili2, ZHANG Nannan2. Topology Optimization of Single Material Flexible Mechanisms Based on Informed Tectonics Theory [J]. China Mechanical Engineering, 2025, 36(04): 873-881. |
| [3] | LIN Jiahui, LI Zhuangzhuang, LI Xuelin, LI Jun. A New Method for Path-engulfment Topology Optimization [J]. China Mechanical Engineering, 2025, 36(03): 504-514. |
| [4] | WANG Shuting1, XIE Qingtian1, YANG Aodi1, LI Xiaobing2, XIONG Tifan1, XIE Xianda2. Research on Non-homogeneous Boundary Condition Imposing Techniques for Isogeometric Topology Optimization [J]. China Mechanical Engineering, 2025, 36(03): 525-535. |
| [5] | LIU Min1, 2, LU Feiyang1, ZHAN Jinqing1, 2, WU Jian1, ZHU Benliang3. Topology Optimization of Compliant Mechanisms with Embedded MovablePiezoelectric Actuator Considering Minimum Length Constraints [J]. China Mechanical Engineering, 2025, 36(02): 255-264. |
| [6] | WANG Hao1, 2, WANG Jiangbei3, LUO Haodong3, WANG Liwen4. An Adaptive Design Domain Topology Optimization Method Based on Improved Quadtree and SBFEM [J]. China Mechanical Engineering, 2024, 35(05): 904-915,927. |
| [7] | YANG Feng, LUO Shijie, YANG Jianghong, WANG Yingjun, . A GPU-accelerated High-efficient Multi-grid Algorithm for ITO [J]. China Mechanical Engineering, 2024, 35(04): 602-613. |
| [8] | SU Yonglei, ZHANG Zhifei. Integrated Casting Triangular Beam Lightweight Improving with Multi-performance Constraints of Body Systems [J]. China Mechanical Engineering, 2024, 35(04): 691-699. |
| [9] | LI Rongqi, YAN Tao, HE Zhicheng, MI Dong, JIANG Chao, ZHENG Jing. A Topology Optimized Design Method for High-performance Structures with Fluid-thermal-mechanics Coupling [J]. China Mechanical Engineering, 2024, 35(03): 487-497. |
| [10] | WANG Chao, CHENG Aiguo, ZHANG Chenglin, YU Wanyuan, HE Zhicheng. Lightweight Design of Protective Structures of Battery Packs for Bottom-scraping Safety [J]. China Mechanical Engineering, 2023, 34(19): 2343-2352. |
| [11] | LIU Yingjie, HU Qiang, ZHAO Xinming, ZHANG Shaoming, HUANG Shuai, WANG Yonghui. Research on Topology Optimization and Additive Manufacturing of Automotive Engine Connection Brackets [J]. China Mechanical Engineering, 2023, 34(18): 2238-2267. |
| [12] | SHEN Huiping, LI XiaLI Ju, LI Tao, MENG Qingmei, WU Guanglei. Effect of Constrained or Unconstrained Branches on Kinematics and Stiffness Performance of PMs —Design,Analysis and Optimization of Two Novel Three-translation PMs with Partial Motion Decoupling Being Examples#br# [J]. China Mechanical Engineering, 2023, 34(13): 1533-1549. |
| [13] | DU Zhongqiu, SHEN Huiping, MENG Qingmei, LI Tao, YANG Tingli. Design and Performance Analysis of 8R Two-translational Spatial Parallel Mechanism with Motion Decoupling and Symbolic Positive Solutions [J]. China Mechanical Engineering, 2023, 34(12): 1425-1435. |
| [14] | DONG Xiaohu, WANG Shitao, ZHOU Dechun. High Rigidity and Lightweight Design of Purlins in Photovoltaic Tracker Bracket [J]. China Mechanical Engineering, 2023, 34(10): 1207-1213. |
| [15] | WEN Guilin, CHEN Gaoxi, WANG Hongxin, XUE Liang, WEI Peng, LIU Jie, . Time Domain Dynamics Topology Optimization of Functionally Gradient Material Structures with Self-weight Load [J]. China Mechanical Engineering, 2022, 33(23): 2774-2782. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||