

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (3): 586-594.DOI: 10.3969/j.issn.1004-132X.2026.03.008
CHEN Xiulong( ), SUN Chuijun, DENG Yu()
), SUN Chuijun, DENG Yu()
Received:2025-03-19
Online:2026-03-25
Published:2026-04-08
Contact:
DENG Yu
陈修龙(), 孙垂军, 邓昱()
通讯作者:
邓昱
作者简介:陈修龙,男,1976年生,教授、博士研究生导师。研究方向为机械系统动力学、机器人机构学理论与应用。E-mail:cxldy99@163.com基金资助:CLC Number:
CHEN Xiulong, SUN Chuijun, DENG Yu. Rigid-Flexible Coupling Dynamics Analyses and Experiments of Spatial Parallel Mechanisms with Clearances[J]. China Mechanical Engineering, 2026, 37(3): 586-594.
陈修龙, 孙垂军, 邓昱. 含间隙空间并联机构刚柔耦合动力学分析与试验[J]. 中国机械工程, 2026, 37(3): 586-594.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.03.008
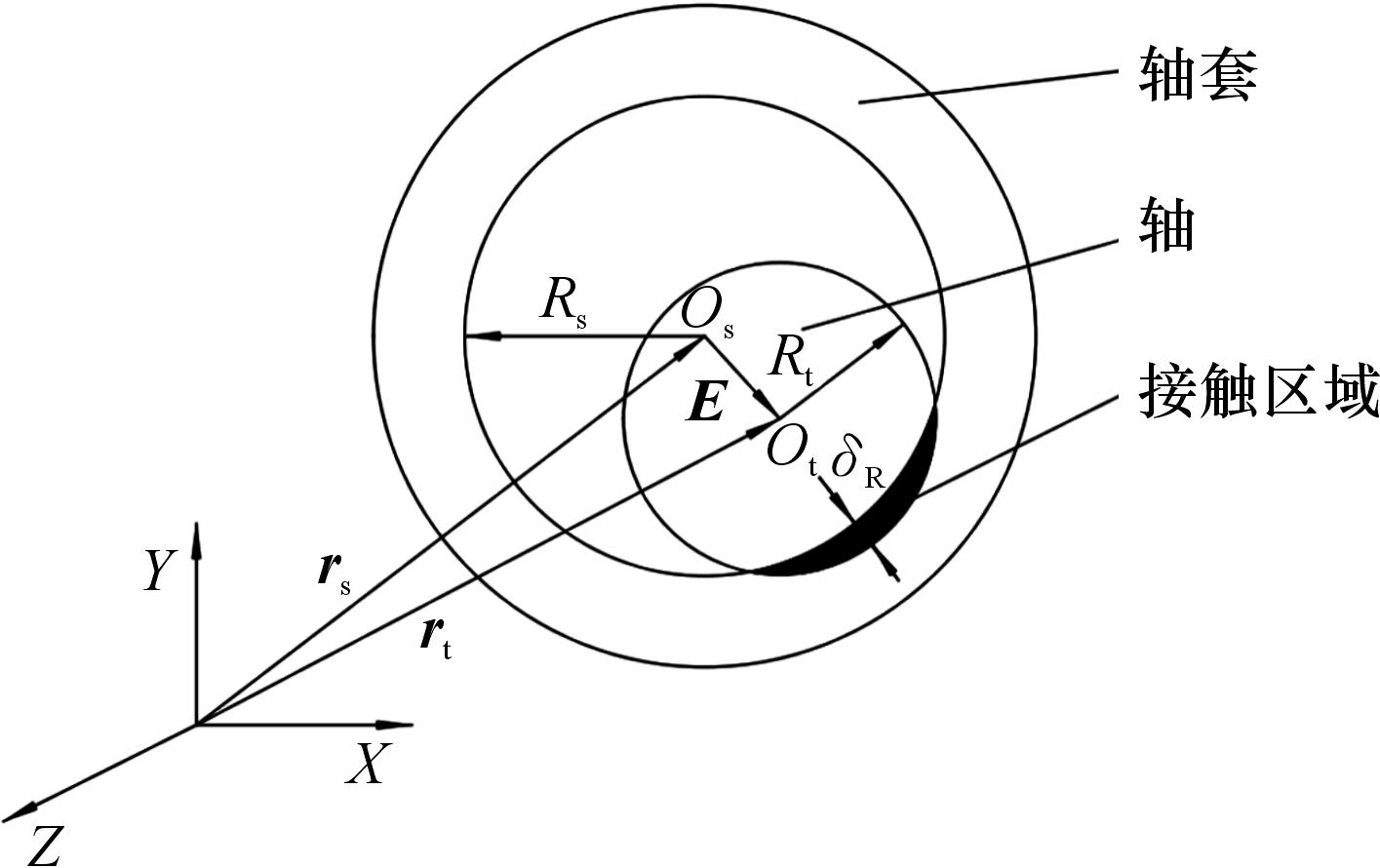
Fig.1 Model of dry clearance
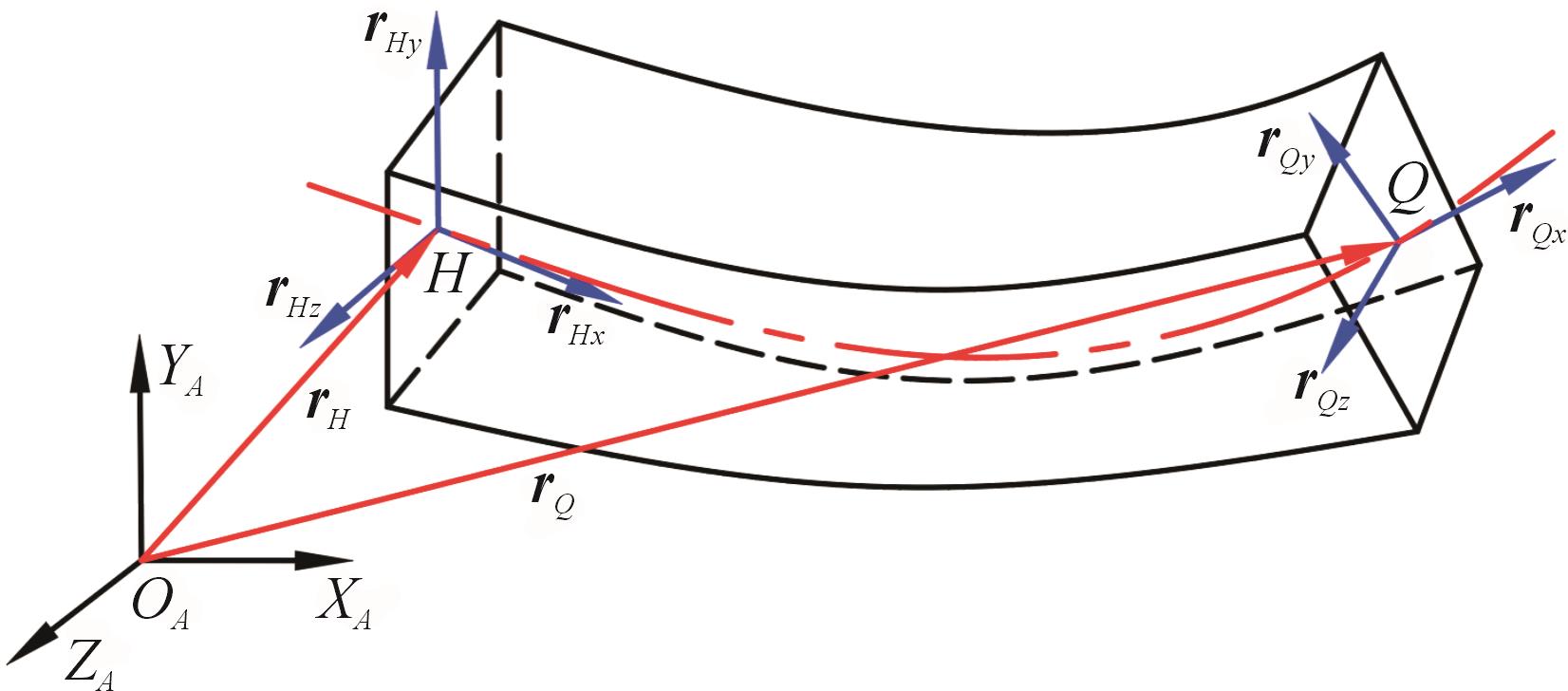
Fig. 2 Three-dimensional two-node beam element model
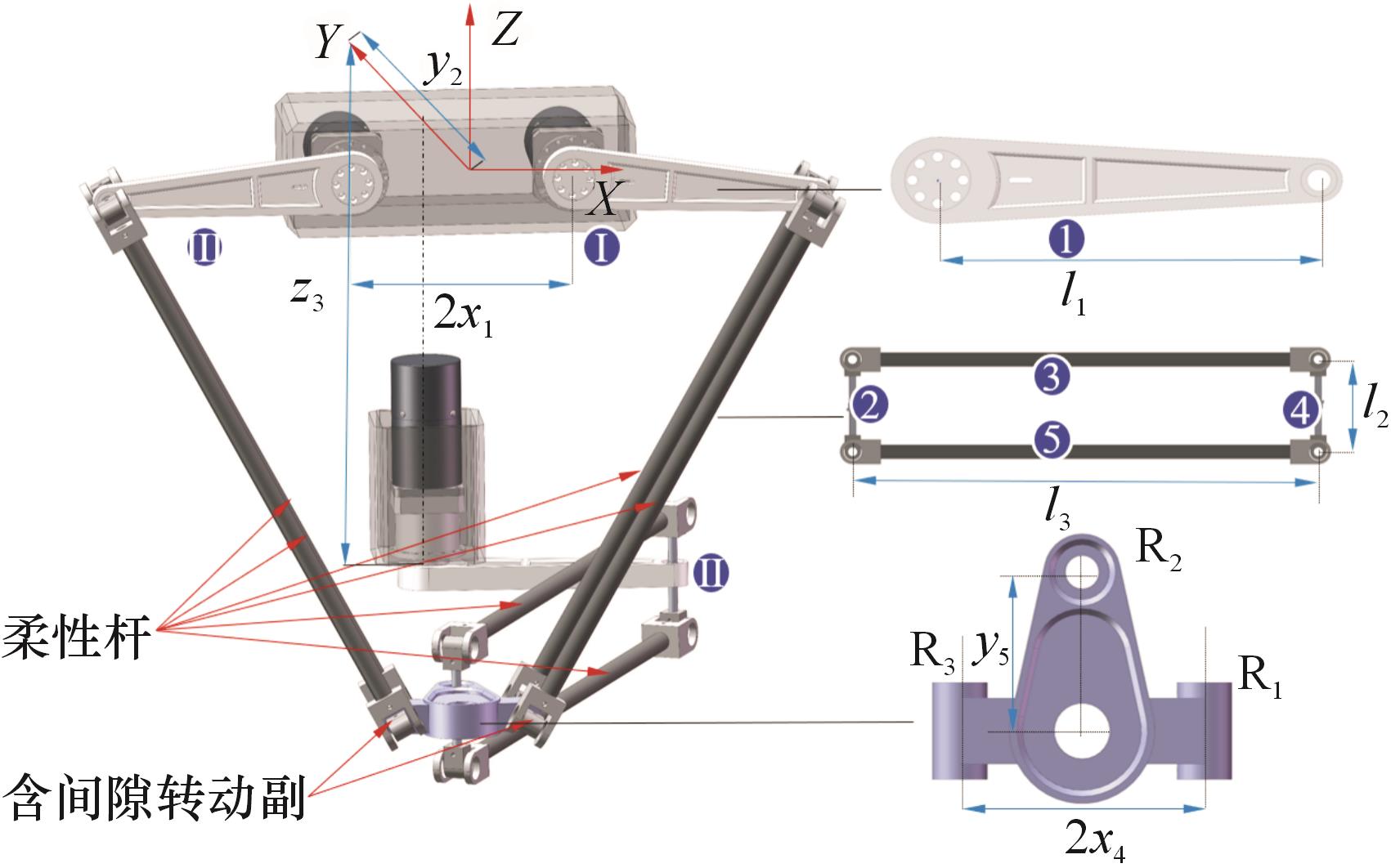
Fig.3 Structure diagram of 3-RRPaR spatial parallel mechanism
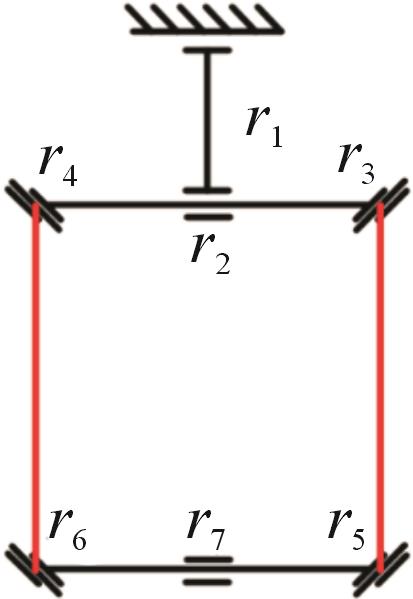
Fig.4 Branch chain 1 rigid-flexible coupling structure diagram
| 构件 | 参数 | 值 |
|---|---|---|
| 主动臂 | li1长度/mm | 255 |
| Pa支链短杆 | lsh长度/mm | 105 |
| 末端执行器 | x4距离/mm | 60 |
| y5距离/mm | 80 | |
| Pa支链长杆 | ls长度/mm | 640 |
| 机架 | x1距离/mm | 100 |
| y2距离/mm | 720 | |
| z3距离/mm | 600 |
Tab.1 Structural parameters of 3-RRPaR spatial parallel mechanism
| 构件 | 参数 | 值 |
|---|---|---|
| 主动臂 | li1长度/mm | 255 |
| Pa支链短杆 | lsh长度/mm | 105 |
| 末端执行器 | x4距离/mm | 60 |
| y5距离/mm | 80 | |
| Pa支链长杆 | ls长度/mm | 640 |
| 机架 | x1距离/mm | 100 |
| y2距离/mm | 720 | |
| z3距离/mm | 600 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 修正系数 | 5 | 泊松比 | 0.3 |
| 恢复系数 | 0.9 | 滑动摩擦系数cf | 0.05 |
| 轴体半径 | 0.014 | 轴套半径 | 0.015 |
| 弹性模量 | 207 | 极限速度 | 0.0001, 0.000 001 |
Tab.2 Gap parameters of 3-RRPaR spatial parallel mechanism with clearance
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 修正系数 | 5 | 泊松比 | 0.3 |
| 恢复系数 | 0.9 | 滑动摩擦系数cf | 0.05 |
| 轴体半径 | 0.014 | 轴套半径 | 0.015 |
| 弹性模量 | 207 | 极限速度 | 0.0001, 0.000 001 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 从动臂长杆横截面积 | 16×16 | 从动臂长杆弹性模量 | 116 |
| 从动臂长杆密度 | 1700 | 谱半径 | 0.7 |
| 允许误差 | 10-7 | 步长 | 0.001 |
Tab.3 Flexible component parameters of 3-RRPaR spatial parallel mechanism with clearance
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 从动臂长杆横截面积 | 16×16 | 从动臂长杆弹性模量 | 116 |
| 从动臂长杆密度 | 1700 | 谱半径 | 0.7 |
| 允许误差 | 10-7 | 步长 | 0.001 |
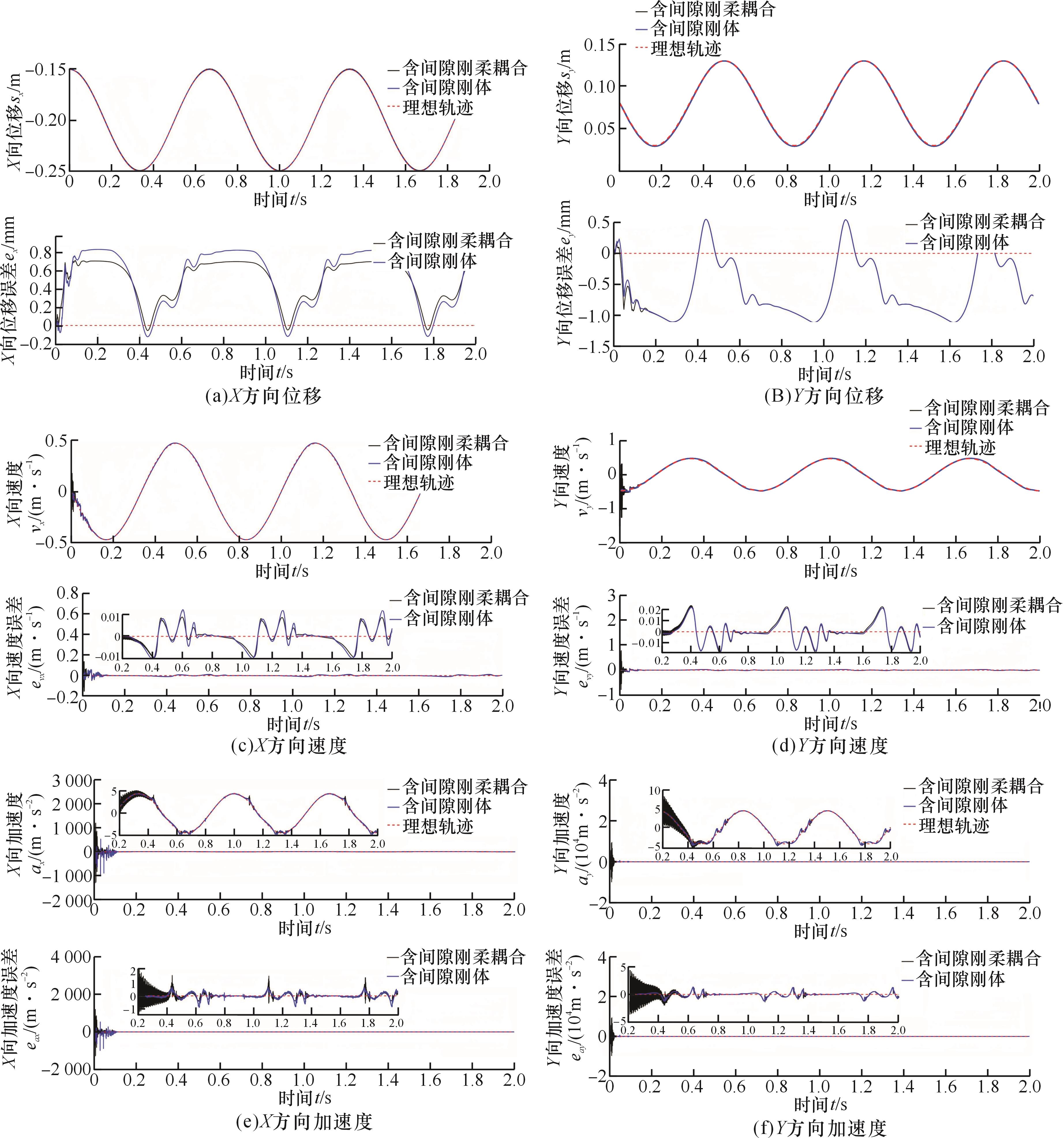
Fig.5 Comparison of dynamic response of rigid body with clearances and rigid-flexible coupling dynamic model with clearances (c=0.5 mm)
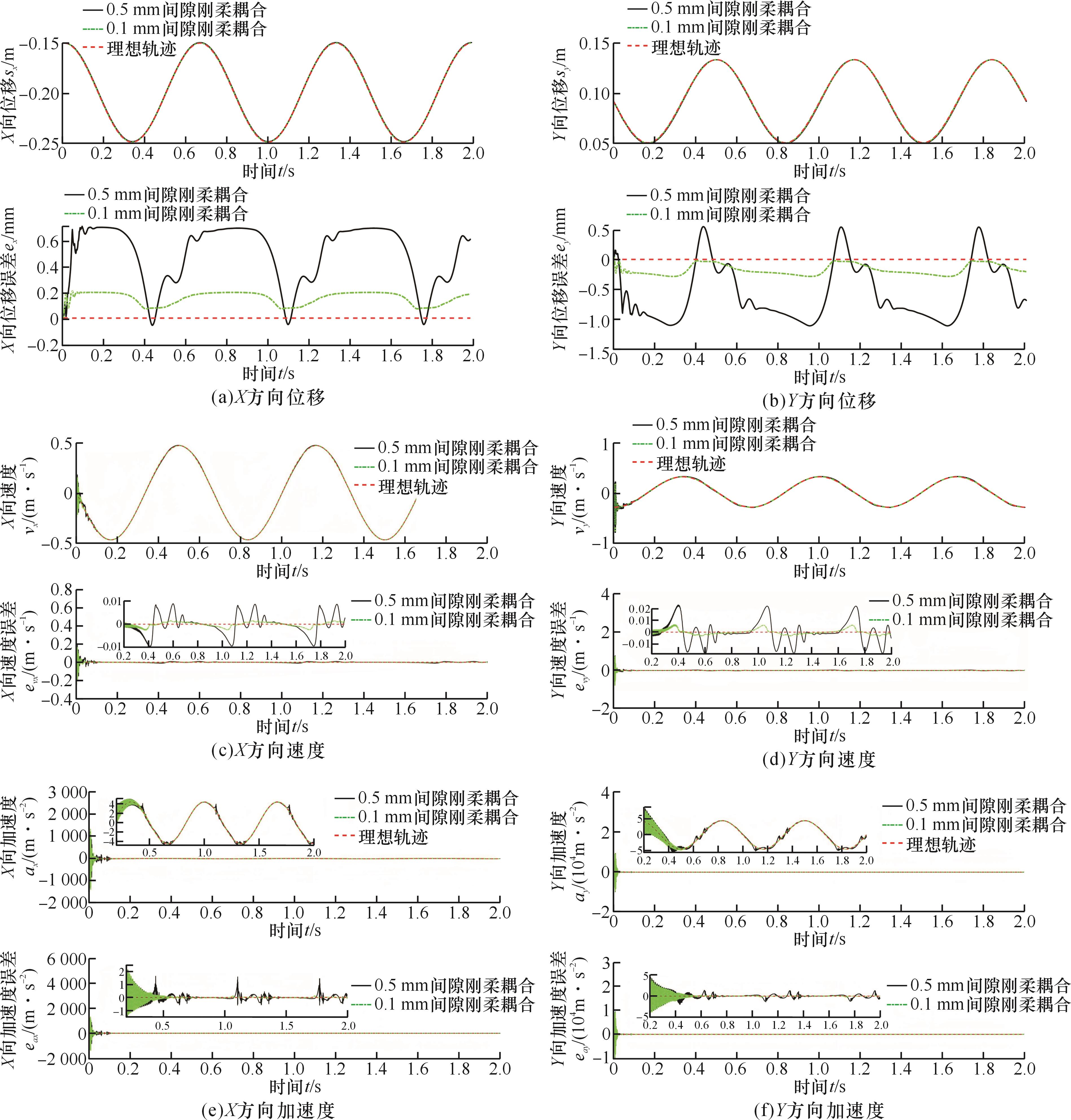
Fig.6 Comparison of dynamic response of rigid-flexible coupling dynamic model under different clearances (c1=0.5 mm, c2=0.1 mm)
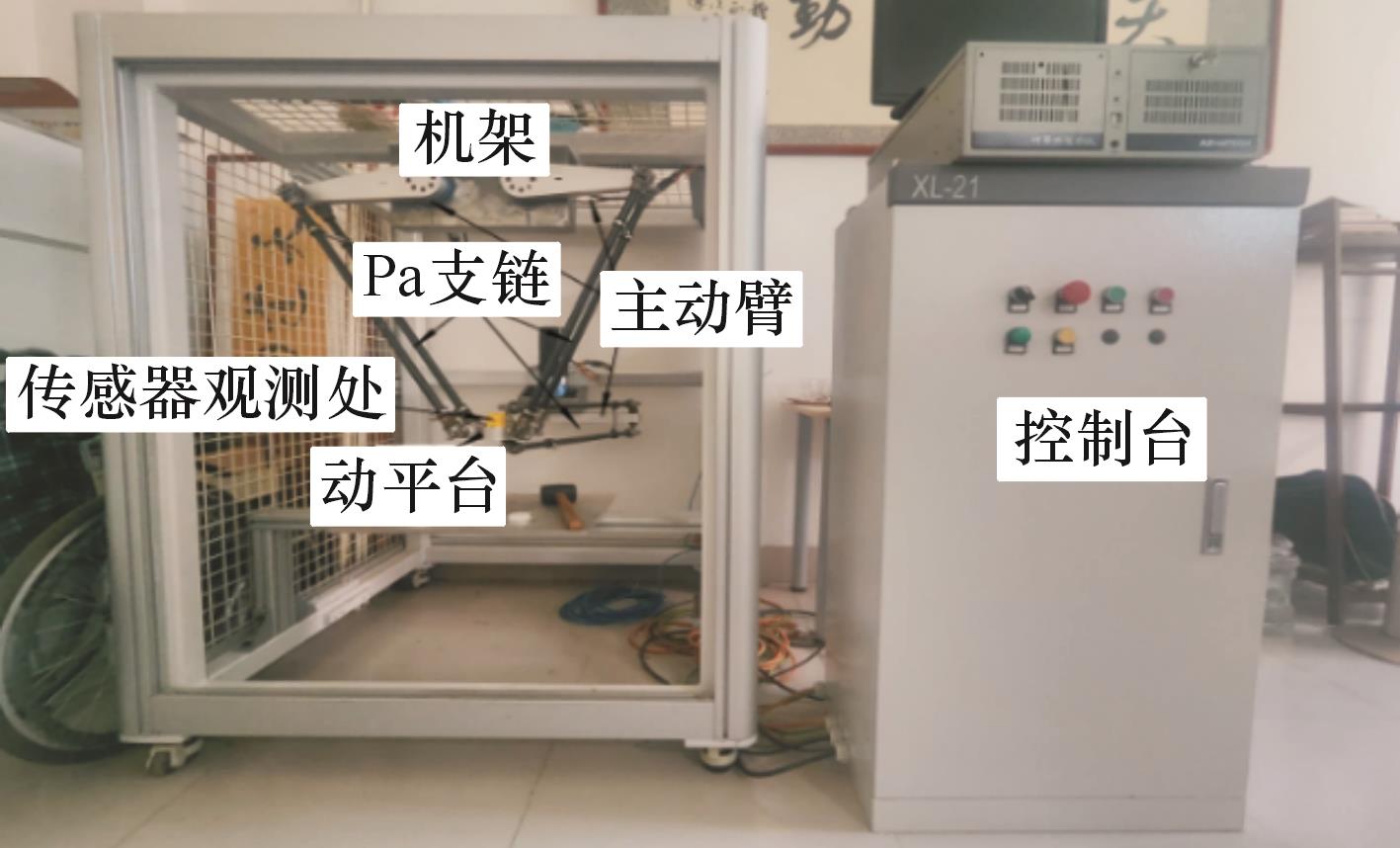
Fig.7 3-RRPaR spatial parallel mechanism experimental bench
| 运动副元素 | 内径/mm | 外径/mm | 长度/mm | 材料 |
|---|---|---|---|---|
| 轴套 | 15 | 24 | 50 | 铝合金 |
| 间隙轴销 | 14/14.8 | 98 | 钢 |
Tab.4 Parameters of revolute joint with clearance
| 运动副元素 | 内径/mm | 外径/mm | 长度/mm | 材料 |
|---|---|---|---|---|
| 轴套 | 15 | 24 | 50 | 铝合金 |
| 间隙轴销 | 14/14.8 | 98 | 钢 |
| 轨迹Ⅰ/m | 轨迹Ⅱ/m |
|---|---|
Tab.5 The test trajectory of 3-RRPaR spatial parallel mechanism
| 轨迹Ⅰ/m | 轨迹Ⅱ/m |
|---|---|
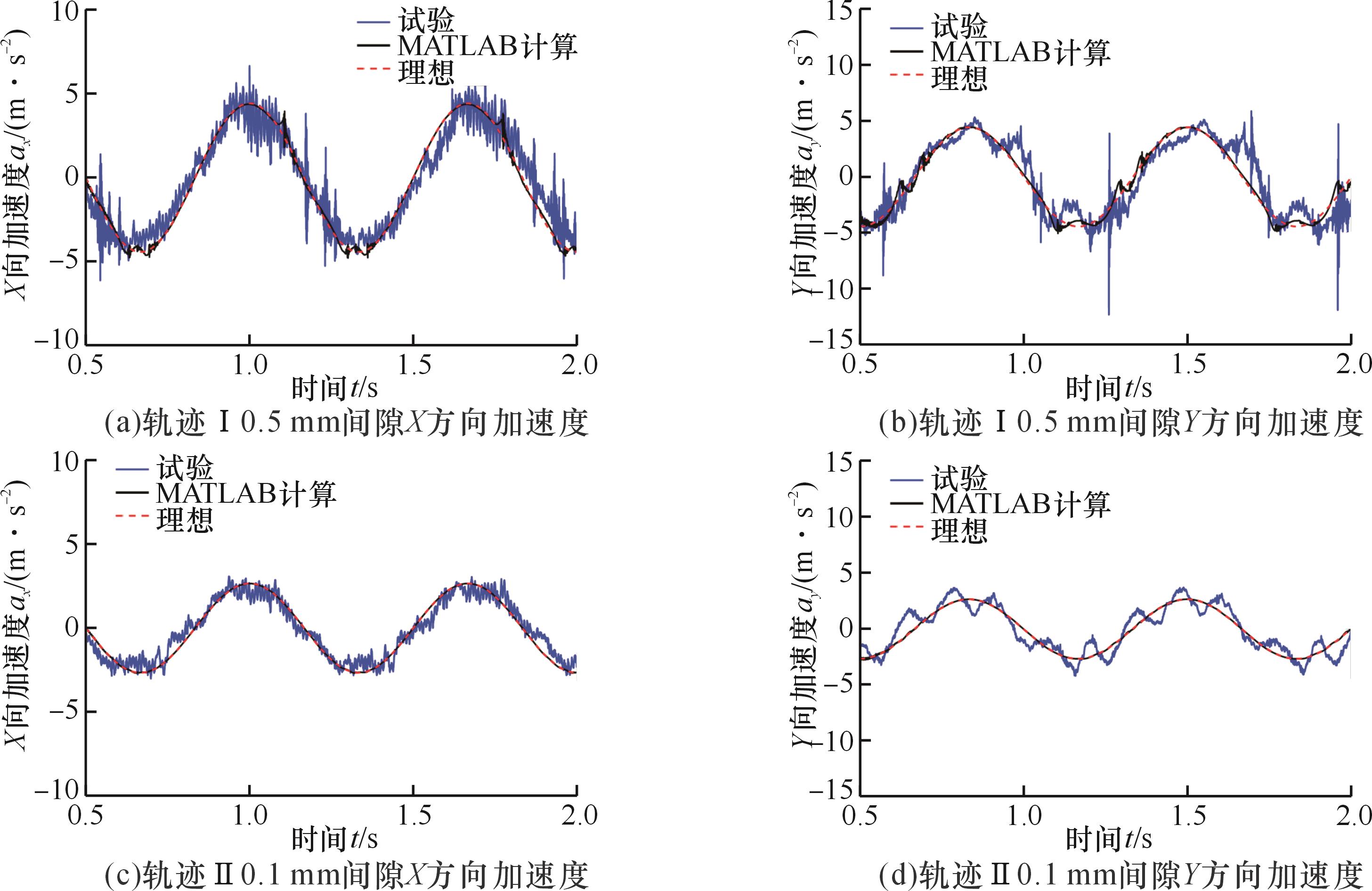
Fig.8 Comparison of the experimental results of the acceleration response of the end effector with the calculation results of the dynamic model (c1=0.5 mm, c2=0.1 mm)
| [1] | 杜中秋, 沈惠平, 孟庆梅, 等. 运动解耦且正解符号化的8R两平移空间并联机构的设计与性能分析[J]. 中国机械工程, 2023, 34(12): 1425-1435. |
| DU Zhongqiu, SHEN Huiping, MENG Qingmei, et al. Design and Performance Analysis of 8R Two-translational Spatial Parallel Mechanism with Motion Decoupling and Symbolic Positive Solutions[J]. China Mechanical Engineering, 2023, 34(12): 1425-1435. | |
| [2] | 黄宁宁, 尤晶晶, 叶鹏达, 等. 一种运动可解耦的Stewart型并联机构的正运动学及奇异性[J]. 中国机械工程, 2025, 36(9): 1951-1960. |
| HUANG Ningning, YOU Jingjing, YE Pengda, et al. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms[J]. China Mechanical Engineering, 2025, 36(9): 1951-1960. | |
| [3] | MARQUES F, ROUPA I, SILVA M T, et al. Examination and Comparison of Different Methods to Model Closed Loop Kinematic Chains Using Lagrangian Formulation with Cut Joint, Clearance Joint Constraint and Elastic Joint Approaches[J]. Mechanism and Machine Theory, 2021, 160: 104294. |
| [4] | FLORES P, AMBRÓSIO J, LANKARANI H M. Contact-impact Events with Friction in Multibody Dynamics: Back to Basics[J]. Mechanism and Machine Theory, 2023, 184: 105305. |
| [5] | 商德勇, 黄云山, 黄欣怡, 等. 基于奇异摄动的刚柔耦合Delta机器人非线性混合控制[J]. 机械工程学报, 2024, 60(5): 95-106. |
| SHANG Deyong, HUANG Yunshan, HUANG Xinyi, et al. Nonlinear Hybrid Control of Rigid Flexible Coupling Delta Robot Based on Singular Perturbation[J]. Journal of Mechanical Engineering, 2024, 60(5): 95-106. | |
| [6] | 商德勇, 黄欣怡, 黄云山, 等. 基于Kane方程的Delta并联机器人刚柔耦合动力学研究[J]. 机械工程学报, 2024, 60(7): 124-133. |
| SHANG Deyong, HUANG Xinyi, HUANG Yunshan, et al. Research on Rigid-Flexible Coupling Dynamics of Delta Parallel Robot Based on Kane Equation[J]. Journal of Mechanical Engineering, 2024, 60(7): 124-133. | |
| [7] | JAVANFAR A, BAMDAD M. Effect of Novel Continuous Friction Model on Nonlinear Dynamics of the Mechanisms with Clearance Joint[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 236(11): 6040-6052. |
| [8] | BAI Zhengfeng, LIU Tianxi, LI Jinyu, et al. Numerical and Experimental Study on Dynamic Characteristics of Planar Mechanism with Mixed Clearances[J]. Mechanics Based Design of Structures and Machines, 2023, 51(11): 6142-6165. |
| [9] | CHEN Xiulong, WANG Tao. Dynamic Behavior Analysis of Rigid-Flexible Coupling Planar Mechanism Considering Dry Clearances and Lubrication Clearances[J]. Journal of Mechanical Science and Technology, 2023, 37(4): 1585-1600. |
| [10] | JING Qian, LIU Hongzhao. Dynamics and Wear Prediction of Mechanisms Considering Multiple Clearances and Coatings[J]. Lubricants, 2023, 11(7): 310. |
| [11] | 陈国强, 周红鹏, 黄俊杰, 等. 考虑关节摩擦的3-PRS并联机构动力学建模研究[J]. 农业机械学报, 2021, 52(8): 416-426. |
| CHEN Guoqiang, ZHOU Hongpeng, HUANG Junjie, et al. Dynamic Modeling with Joint Friction of 3-PRS Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8): 416-426. | |
| [12] | WANG Xiaoyu, WANG Haofeng, ZHAO Jingchao, et al. Rigid-Flexible Coupling Dynamics Modeling of Spatial Crank-Slider Mechanism Based on Absolute Node Coordinate Formulation[J]. Mathematics, 2022, 10(6): 881. |
| [13] | 刘凉, 汪博深, 冯建峰, 等. 含柔性动平台并联机器人动力学建模方法研究[J]. 农业机械学报, 2023, 54(12): 417-430. |
| LIU Liang, WANG Boshen, FENG Jianfeng, et al. Dynamic Modeling Method of Parallel Robot with Flexible Moving Platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(12): 417-430. | |
| [14] | GUO Feng, CHENG Gang, WANG Shilin, et al. Rigid–Flexible Coupling Dynamics Analysis with Joint Clearance for a 5-DOF Hybrid Polishing Robot[J]. Robotica, 2022, 40(7): 2168-2188. |
| [15] | 金国光, 王志敏, 畅博彦, 等. 含间隙变胞机构动力学建模与平稳性分析[J]. 机械工程学报, 2024, 60(21): 144-155. |
| JIN Guoguang, WANG Zhimin, CHANG Boyan, et al. Dynamic Modeling and Stationarity Analysis of Metamorphic Mechanism with Clearance Joint[J]. Journal of Mechanical Engineering, 2024, 60(21): 144-155. | |
| [16] | WU Xuze, SUN Yu, WANG Yu, et al. Correlation Dimension and Bifurcation Analysis for the Planar Slider-crank Mechanism with Multiple Clearance Joints[J]. Multibody System Dynamics, 2021, 52(1): 95-116. |
| [17] | 吴懋琦, 谭述君, 高飞雄. 基于绝对节点坐标法的平面梁有限变形下变形重构[J]. 力学学报, 2021, 53(10): 2776-2789. |
| WU Maoqi, TAN Shujun, GAO Feixiong. Shape Reconstruction of Plane Beam with Finite Deformation Based on Absolute Nodal Coordinate Formulation[J]. Chinese Journal of Theoretical and Applied Mechanics, 2021, 53(10): 2776-2789. | |
| [18] | XING Yu, LIU Lei, LIU Chao, et al. Mechanical Deformation Analysis of a Flexible Finger in Terms of an Improved ANCF Plate Element[J]. Machines, 2022, 10(7): 518. |
| [1] | Chengzhan LI, Pengcheng GUO, Congchang XU, Luoxing LI, Yongfu XIAO, Shuxia JIANG. Rigid-flexible Coupling Identification of MDOF Excitation for Door Limiter and Shaking Optimization of Window Frame during Closing [J]. China Mechanical Engineering, 2025, 36(11): 2792-2800. |
| [2] | ZHANG Zhigang1, JIN Yongli1, WANG Dongyin1, FU Zhijun1, QIN Guodong2. Tip-trajectory Following Algorithm for Snake-arm Robots Based on Dynamics Denoising Model [J]. China Mechanical Engineering, 2025, 36(03): 407-413. |
| [3] | CHEN Xiulong, WANG Aiguo, WANG Jingqing. Dynamics Optimization Design of Multi-link Mechanisms with Lubrication Clearances of Revolute Joints [J]. China Mechanical Engineering, 2025, 36(01): 87-95. |
| [4] | LIU Yanhao, NI Bingyu, TIAN Wanyi, JIANG Chao. A Sequential Simulation Method for Dynamic Uncertainty Analysis of Rigid-flexible Coupling Systems under Interval Process Excitations [J]. China Mechanical Engineering, 2024, 35(05): 770-783. |
| [5] | ZHANG Lei, XU Haijun, ZHANG Xiang, XU Xiaojun, ZOU Teng'an. Characteristics of High Compact Power Transmission Mechanisms of Crossed Swash-plates [J]. China Mechanical Engineering, 2021, 32(18): 2165-2174. |
| [6] | LIU Yanwei, PAN Hao, LIU Sanwa, LI Shujuan, LI Yan. Design and Implementation of a Tilt-deformable Quadrotor [J]. China Mechanical Engineering, 2021, 32(16): 1930-1936. |
| [7] | . Stiffness Analysis of New Type Non-pneumatic Tires Based on Pseudo-rigid-flexible Body Coupling Model#br# [J]. China Mechanical Engineering, 2021, 32(09): 1051-1060,1072. |
| [8] | WANG Kunpeng1,2;XIAO Xiaohua1,2;ZHU Haiyan1,2;ZENG Jie1,2. Rigid-flexible Coupling Dynamics and Structure Optimization of Flexible Tractors [J]. China Mechanical Engineering, 2020, 31(08): 915-923,930. |
| [9] | ZHAO Yan;RUAN Chengming;WANG Songwei. Second-order Accurate Modeling and Experimental Studies of Rigid-flexible Coupled Flexible Manipulator [J]. China Mechanical Engineering, 2018, 29(02): 205-210. |
| [10] | Wei Xiaohui, Wang Yulong, Yin Yin, Nie Hong, Ni Huajin. Failure Analysis and Improved Design of a Landing Gear Retraction Mechanism [J]. China Mechanical Engineering, 2014, 25(3): 399-403. |
| [11] | Wu Wenguang, Gu Zhengqi, Mi Chengji. Analysis and Optimization of Ride Comfort of Electric Wheel Dump Truck Based on a Rigid-flexible Coupling Model [J]. China Mechanical Engineering, 2014, 25(20): 2819-2824. |
| [12] | Jin Yinglian, Wang Binrui, Fang Shuiguang. Adaptive Impendence Control of Two-links Flexible Manipulator under Unknown Environments [J]. China Mechanical Engineering, 2014, 25(17): 2351-2355. |
| [13] | SUN Wei-1, LU Meng-2, HONG Bo-1, WEN Bang-Chun-1. Dynamics and Statics Analysis of Column-Spindle System Considering Guide Joint Characteristics [J]. China Mechanical Engineering, 2012, 23(23): 2874-2878. |
| [14] | ZHANG Jun-Feng, HE Yan-Song, YANG Hai-Wei, HUANG Yong. Modification of Cab Suspension System Based on Pitch Angular Acceleration [J]. China Mechanical Engineering, 2012, 23(18): 2258-2262. |
| [15] | WANG Bin-Dui-1, 2, FANG Shui-Guang-1, YAN Dong-Meng-1. Rigid-flexible Coupling Dynamics Modeling of Robot Manipulators and Modal Analysis during Swing [J]. China Mechanical Engineering, 2012, 23(17): 2092-2097. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||