

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (1): 114-125.DOI: 10.3969/j.issn.1004-132X.2026.01.013
Previous Articles Next Articles
ZHU Xiao( ), SHEN Huiping(), LI Ju, LI Tao, YE Pengda, ZHU Wei
), SHEN Huiping(), LI Ju, LI Tao, YE Pengda, ZHU Wei
Received:2024-09-28
Online:2026-01-25
Published:2026-02-05
Contact:
SHEN Huiping
朱潇(), 沈惠平(), 李菊, 李涛, 叶鹏达, 朱伟
通讯作者:
沈惠平
作者简介:朱潇,女,2001年生,硕士研究生。研究方向为并联机器人机构学。E-mail:18796167749@139.com基金资助:CLC Number:
ZHU Xiao, SHEN Huiping, LI Ju, LI Tao, YE Pengda, ZHU Wei. Topological Design and Performance Analysis of 3-DOF Parallel Mechanisms with Alternately Used Moving Platforms[J]. China Mechanical Engineering, 2026, 37(1): 114-125.
朱潇, 沈惠平, 李菊, 李涛, 叶鹏达, 朱伟. 可轮换用动平台三自由度并联机构的拓扑设计及其性能分析[J]. 中国机械工程, 2026, 37(1): 114-125.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.01.013
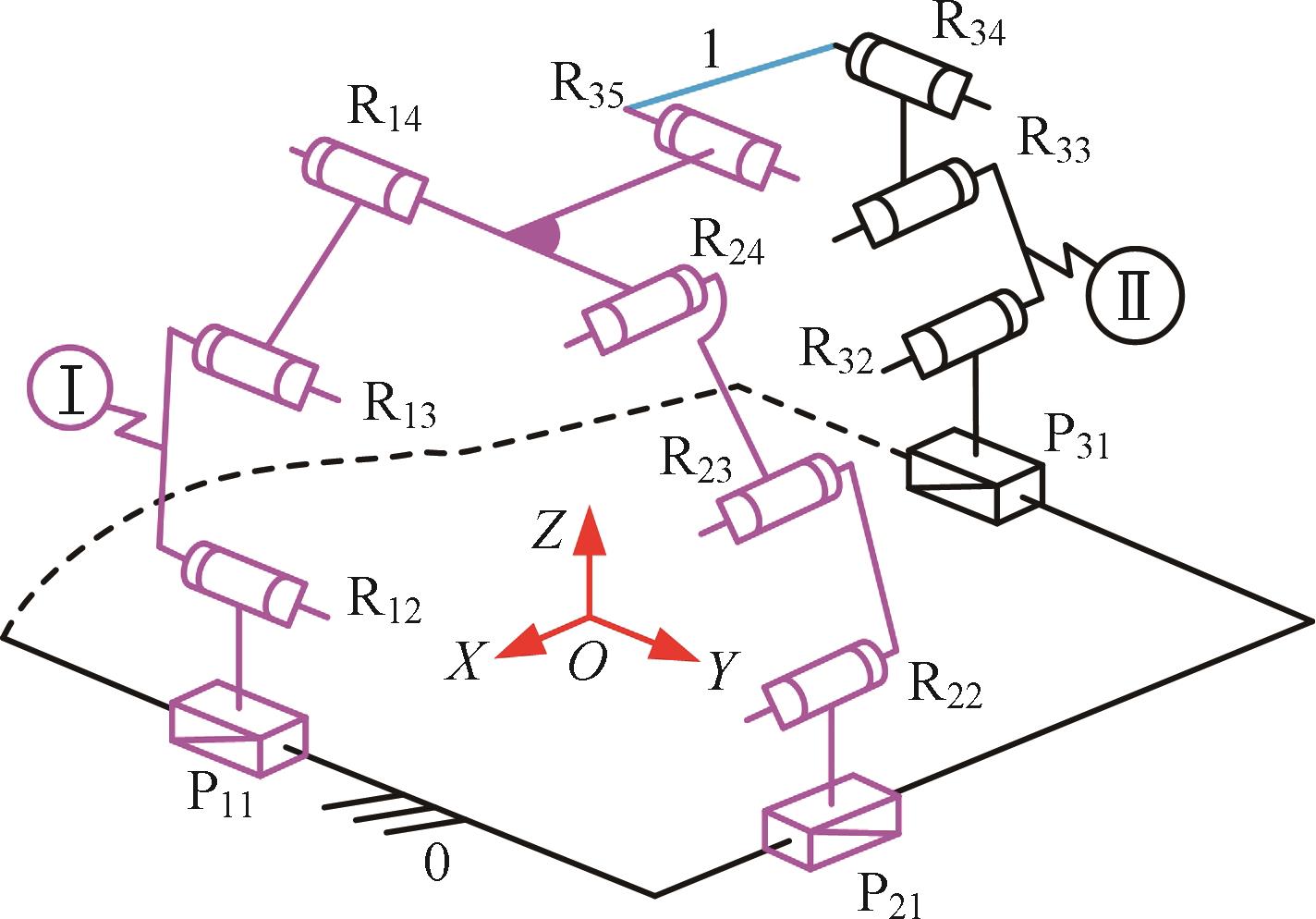
Fig.1 Schematic diagram of the PM in 3T1R output mode
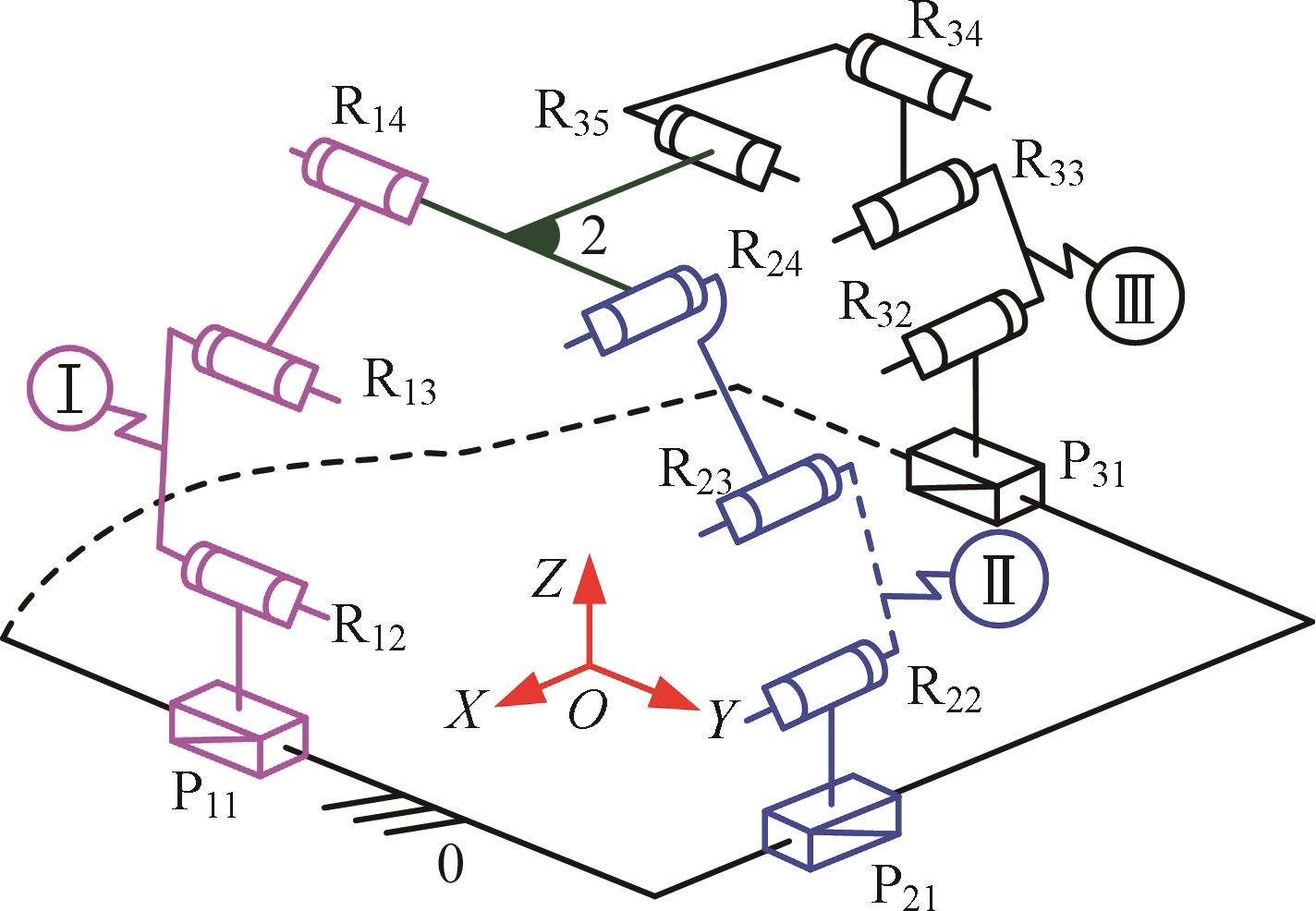
Fig.2 Schematic diagram of the PM in 3T output mode
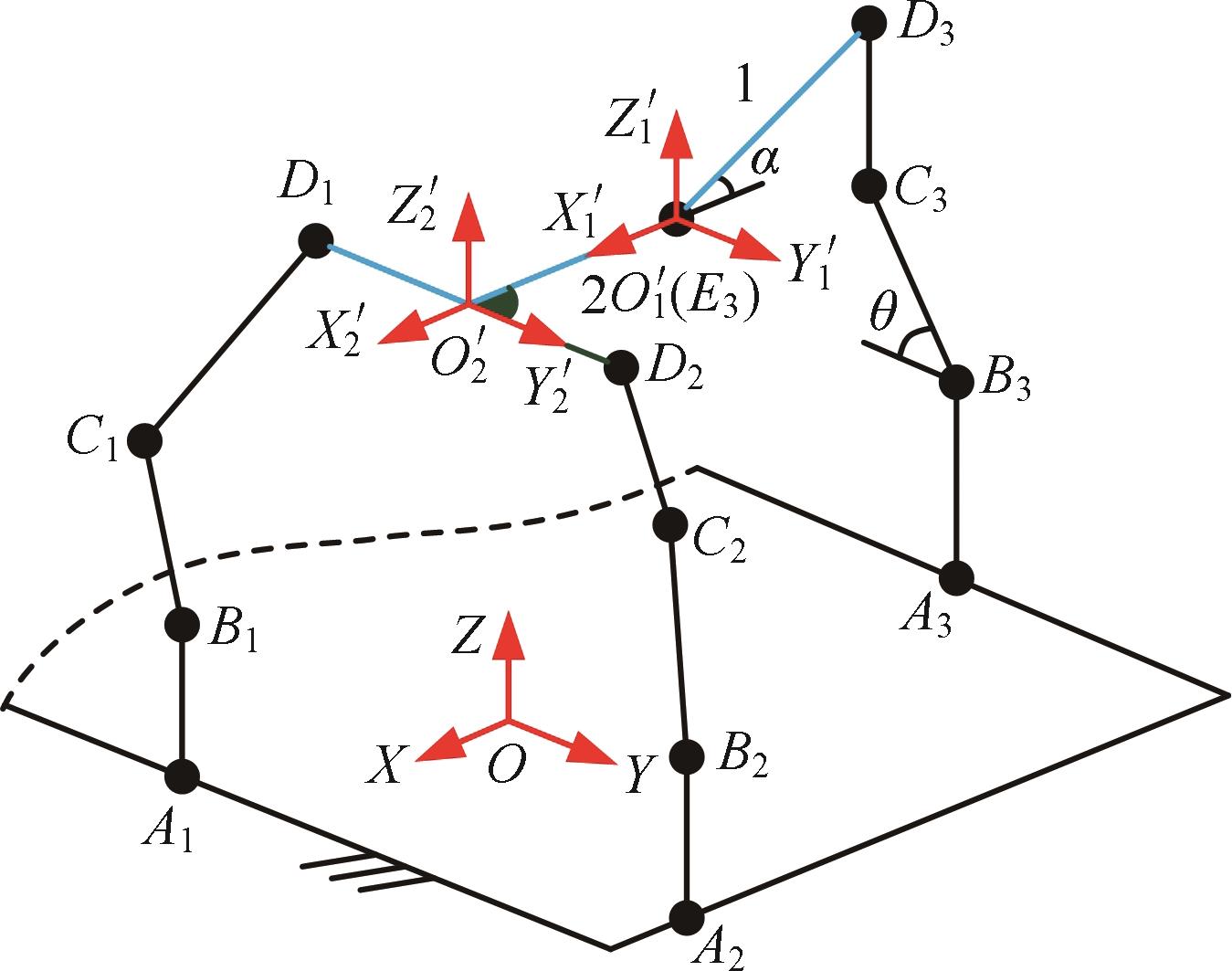
Fig.3 Kinematic modeling of 3-DOF APM-PM
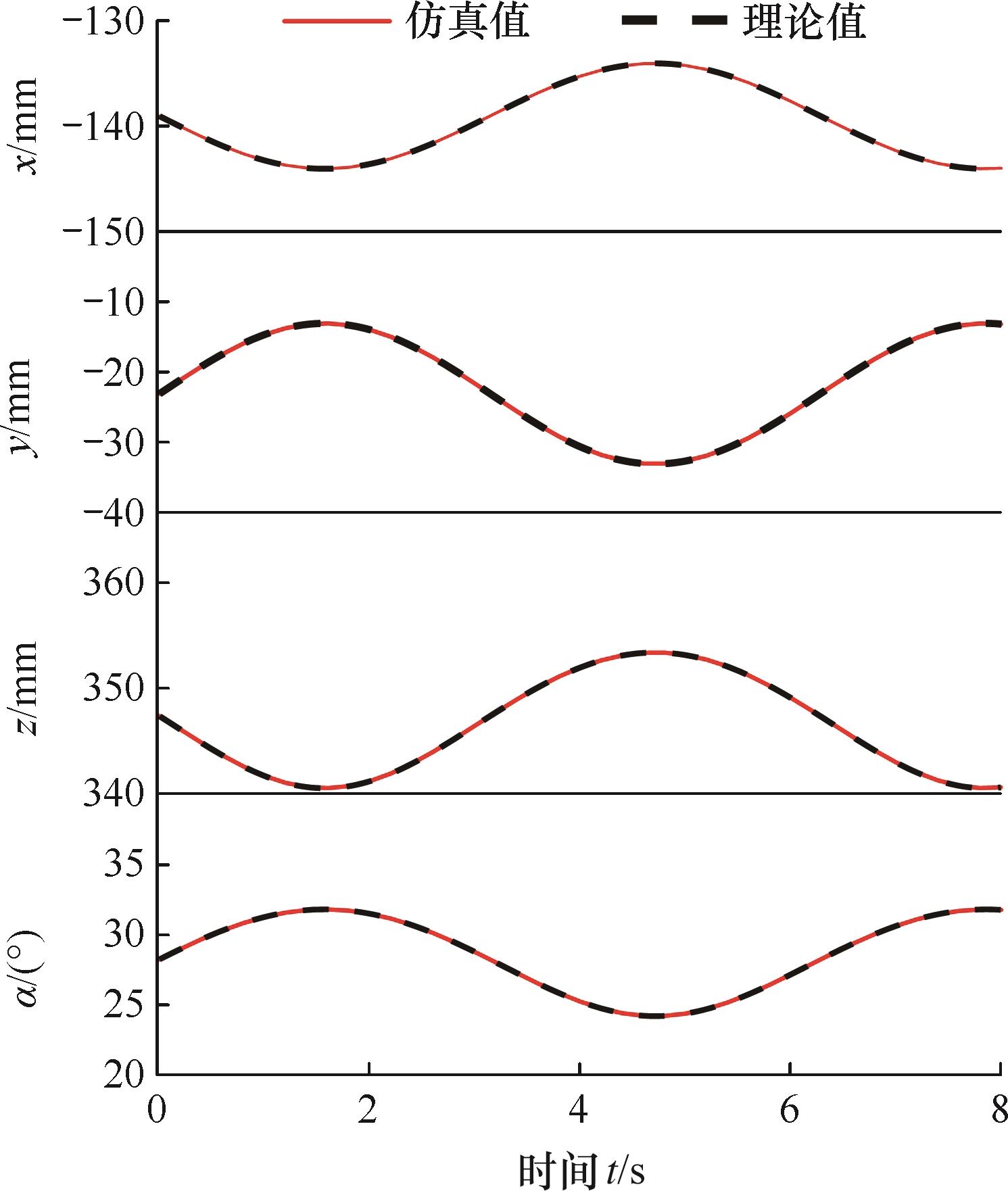
Fig.4 Displacement curves of moving platform 1 in 3T1R mode

Fig.5 Displacement curves of moving platform 2 in 3T mode
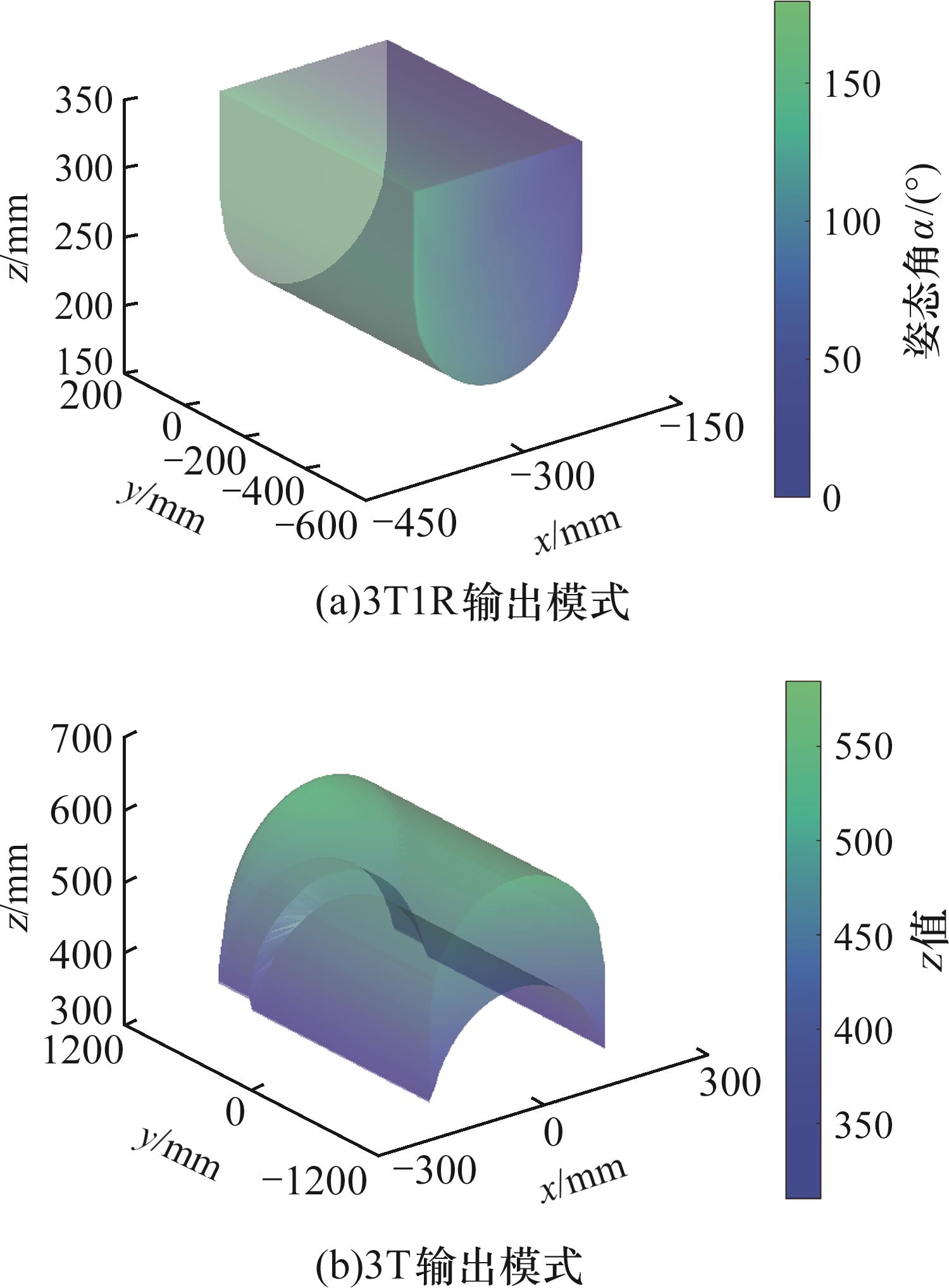
Fig.6 3D workspaces at the centroids of moving platforms 1 and 2
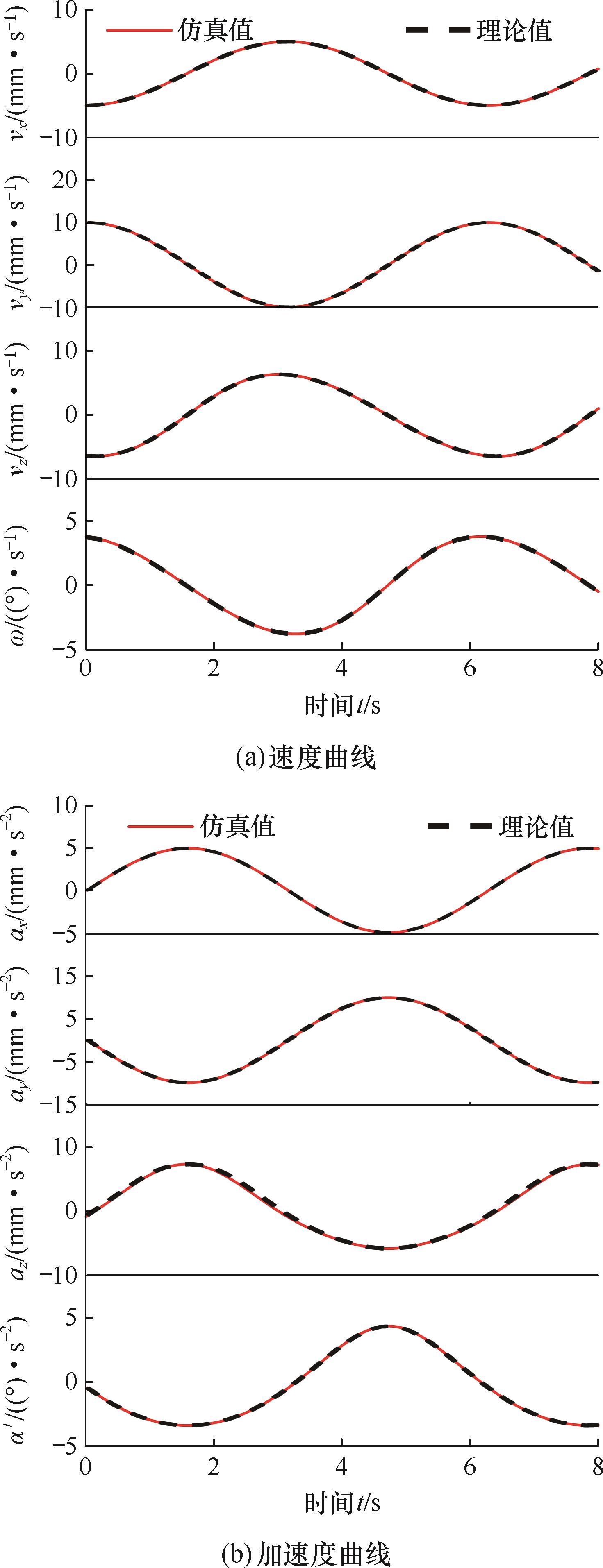
Fig.7 Motion curve of moving platform mode
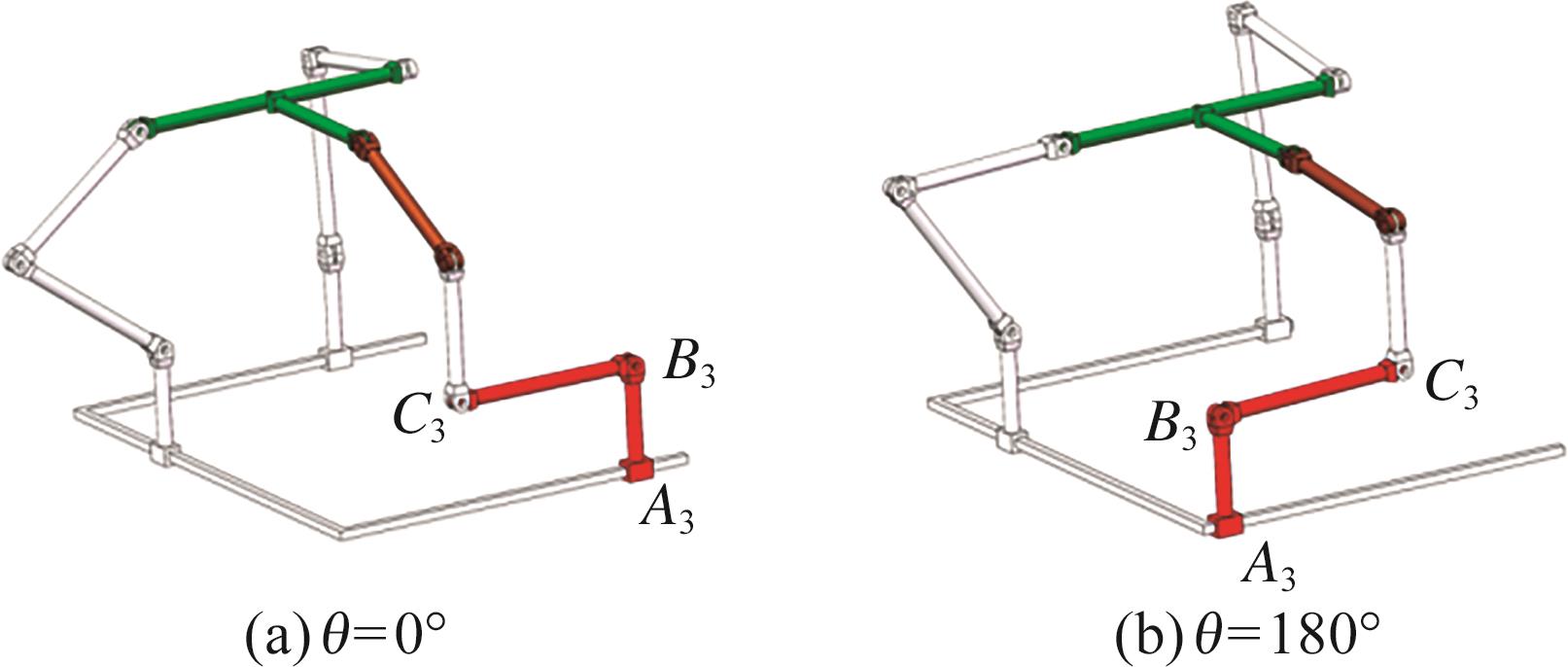
Fig.8 Input singular position
| 名称 | IXX | IYY | IZZ |
|---|---|---|---|
| 杆件B1C1 | 185 518.3 | 314 549.1 | 261 395.8 |
| 杆件B2C2 | 257 012.5 | 169 818.5 | 196 233.8 |
| 杆件B3C3 | 100 552.4 | 271 593.9 | 171 441.8 |
| 杆件C1D1 | 448 544.8 | 527 994.4 | 261 925.3 |
| 杆件C2D2 | 481 678.6 | 424 287.5 | 207 711.1 |
| T型杆D1D2E3(动平台2) | 187 919.2 | 242 926.1 | 562 211.3 |
| 杆件E3D3(动平台1) | 226 360.8 | 270 871.4 | 484 048.2 |
Tab.1 Parameters of rotational inertia of each bar kg·mm2
| 名称 | IXX | IYY | IZZ |
|---|---|---|---|
| 杆件B1C1 | 185 518.3 | 314 549.1 | 261 395.8 |
| 杆件B2C2 | 257 012.5 | 169 818.5 | 196 233.8 |
| 杆件B3C3 | 100 552.4 | 271 593.9 | 171 441.8 |
| 杆件C1D1 | 448 544.8 | 527 994.4 | 261 925.3 |
| 杆件C2D2 | 481 678.6 | 424 287.5 | 207 711.1 |
| T型杆D1D2E3(动平台2) | 187 919.2 | 242 926.1 | 562 211.3 |
| 杆件E3D3(动平台1) | 226 360.8 | 270 871.4 | 484 048.2 |
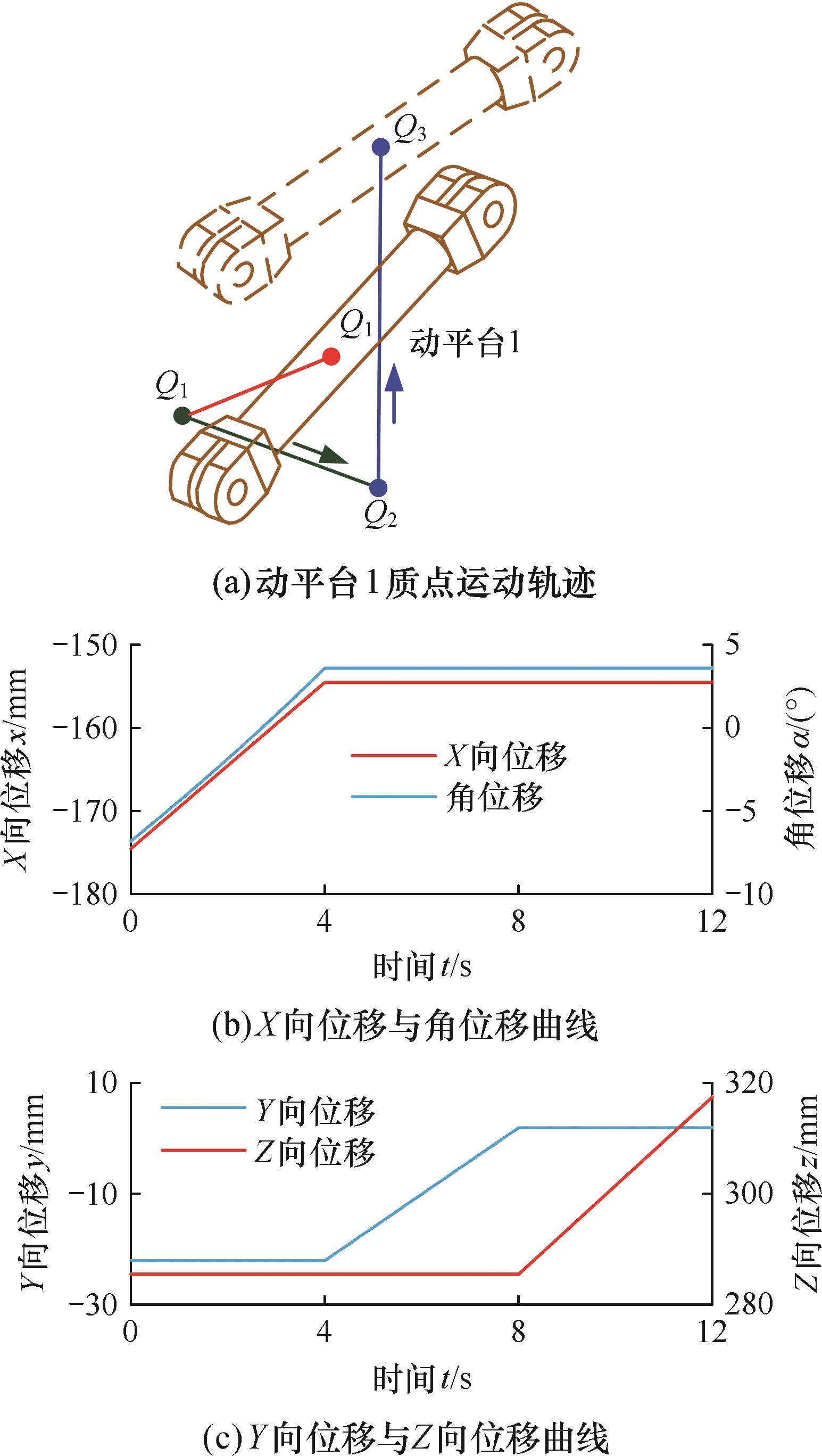
Fig.9 The motion trajectory and law of moving platform 1 in 3T1R mode
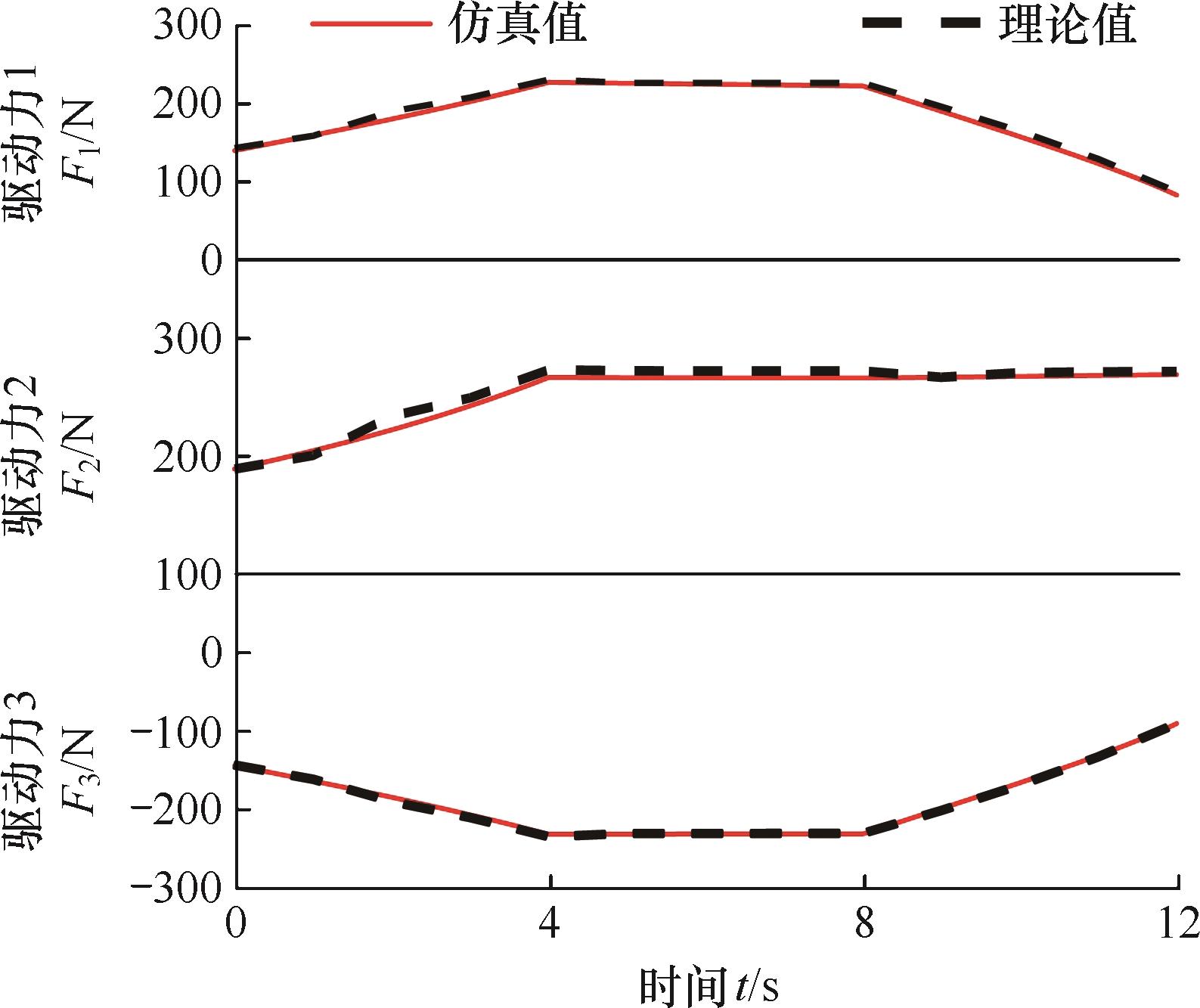
Fig.10 Curves of driving force in 3T1R mode
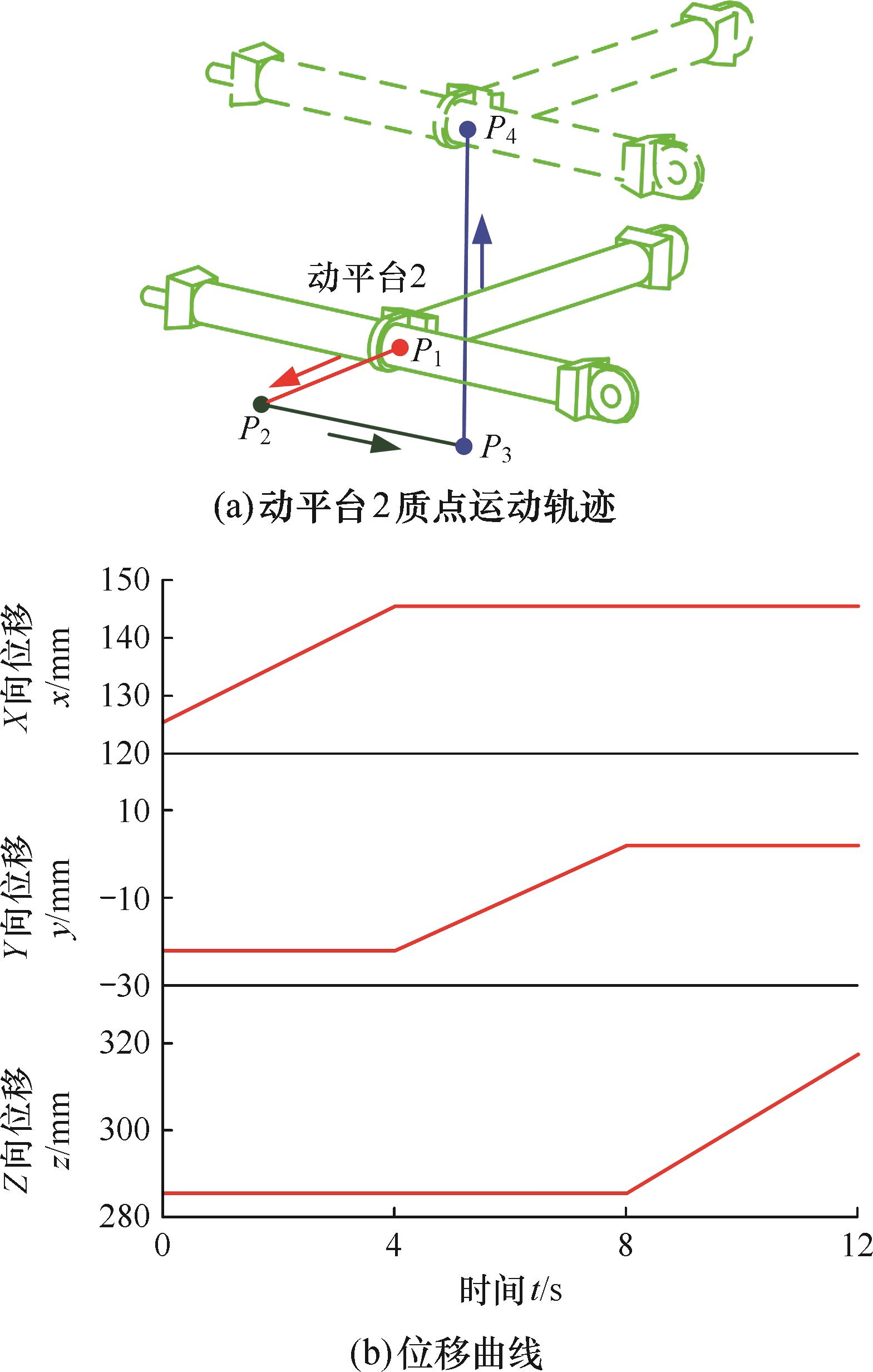
Fig.11 The motion trajectory and law of moving platform 2 in 3T mode
| 设计变量 | 约束范围 | 设计变量 | 约束范围 |
|---|---|---|---|
| l1 | [70,170] | l6 | [110,210] |
| l4 | [130,230] | d | [102,152] |
| l5 | [75,175] | e | [250,350] |
Tab. 2 Constraint ranges for design variables
| 设计变量 | 约束范围 | 设计变量 | 约束范围 |
|---|---|---|---|
| l1 | [70,170] | l6 | [110,210] |
| l4 | [130,230] | d | [102,152] |
| l5 | [75,175] | e | [250,350] |
| 维度 | 随机数 | 迭代次数 | 缩放因子 | 交叉概率 |
|---|---|---|---|---|
| 7 | 100 | 20 | 0.5 | 0.9 |
Tab.3 Parameter settings
| 维度 | 随机数 | 迭代次数 | 缩放因子 | 交叉概率 |
|---|---|---|---|---|
| 7 | 100 | 20 | 0.5 | 0.9 |
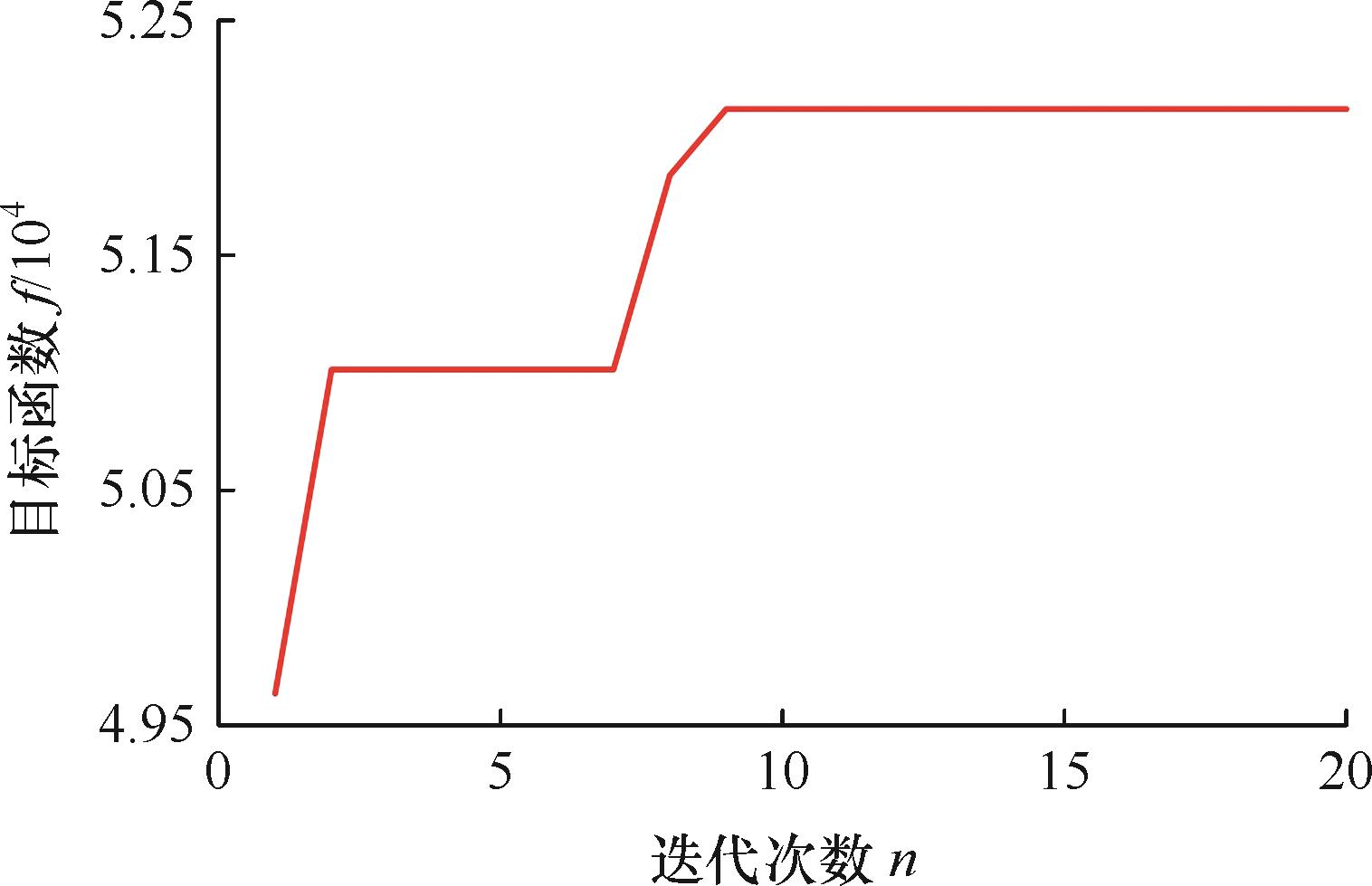
Fig.10 Curve of the objective function with the number of iterations
| 变量 | 优化前 | 优化后 | 变量 | 优化前 | 优化后 |
|---|---|---|---|---|---|
| l1 | 120 | 105.437 | l6 | 160 | 205.031 |
| l4 | 180 | 227.425 | d | 152 | 177.401 |
| l5 | 125 | 94.118 | e | 300 | 278.112 |
Tab.4 Parameter values of optimized mechanism components
| 变量 | 优化前 | 优化后 | 变量 | 优化前 | 优化后 |
|---|---|---|---|---|---|
| l1 | 120 | 105.437 | l6 | 160 | 205.031 |
| l4 | 180 | 227.425 | d | 152 | 177.401 |
| l5 | 125 | 94.118 | e | 300 | 278.112 |
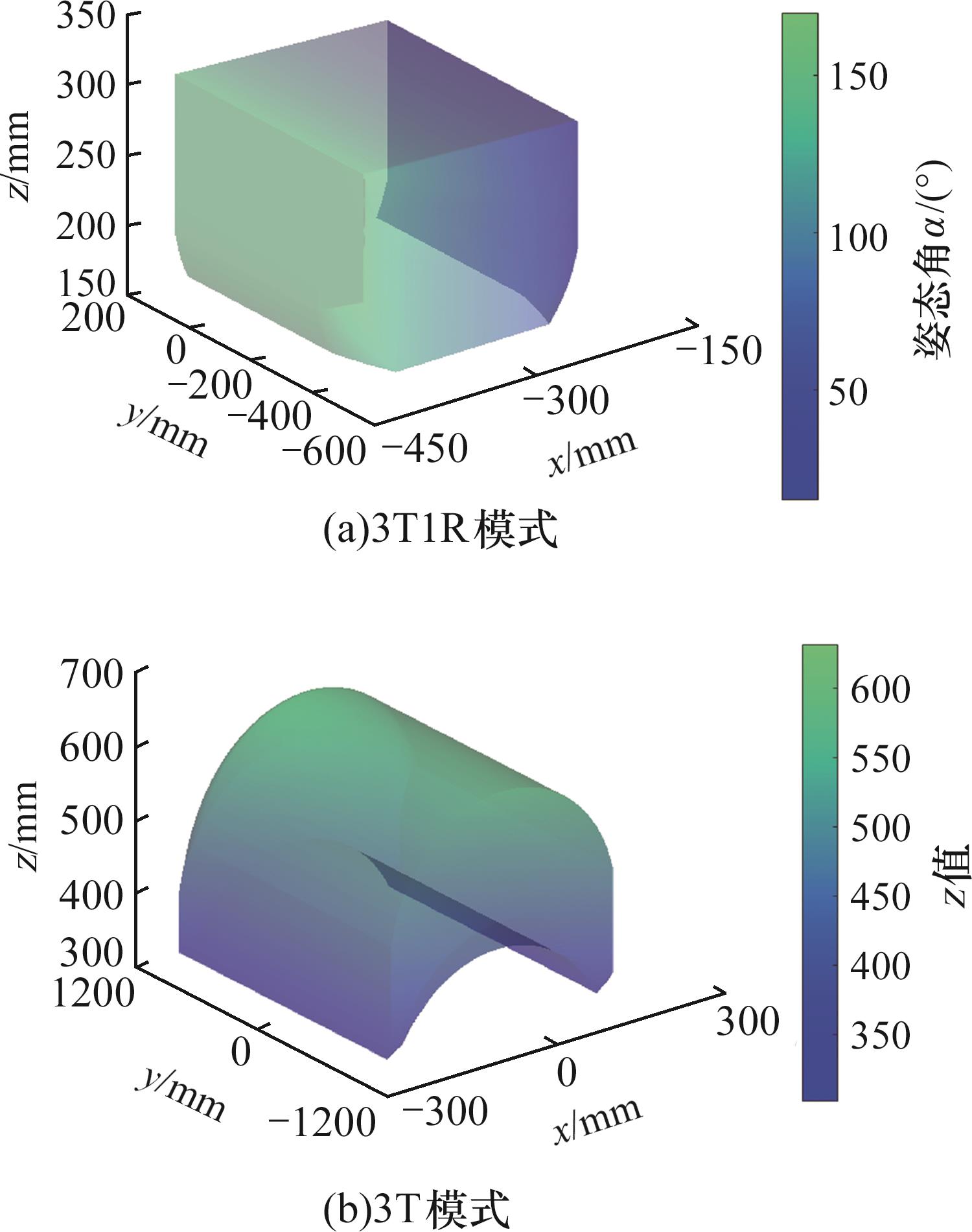
Fig.13 Workspace of the optimized mechanism
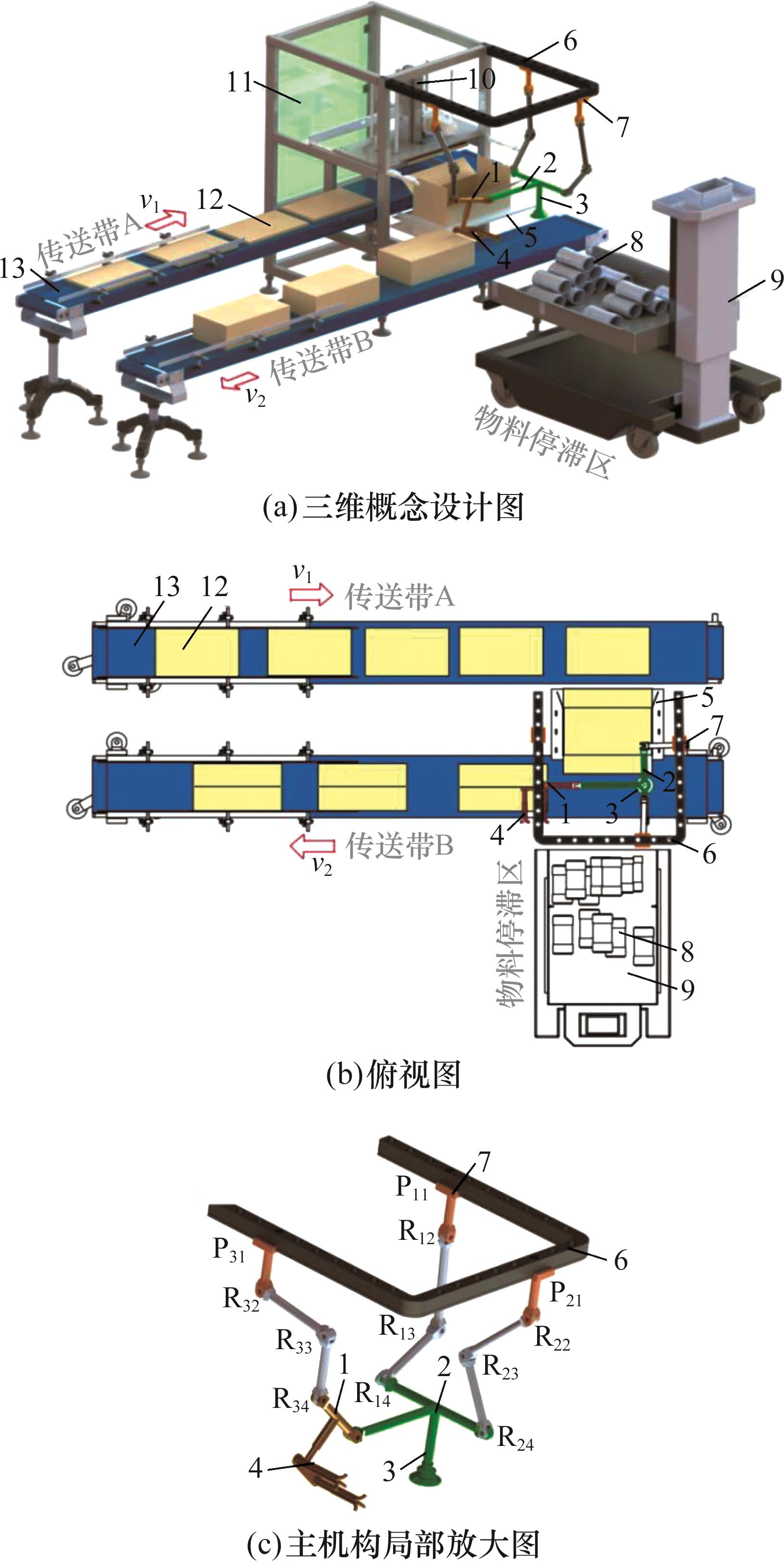
Fig.14 Conceptual design diagram of the application scenario
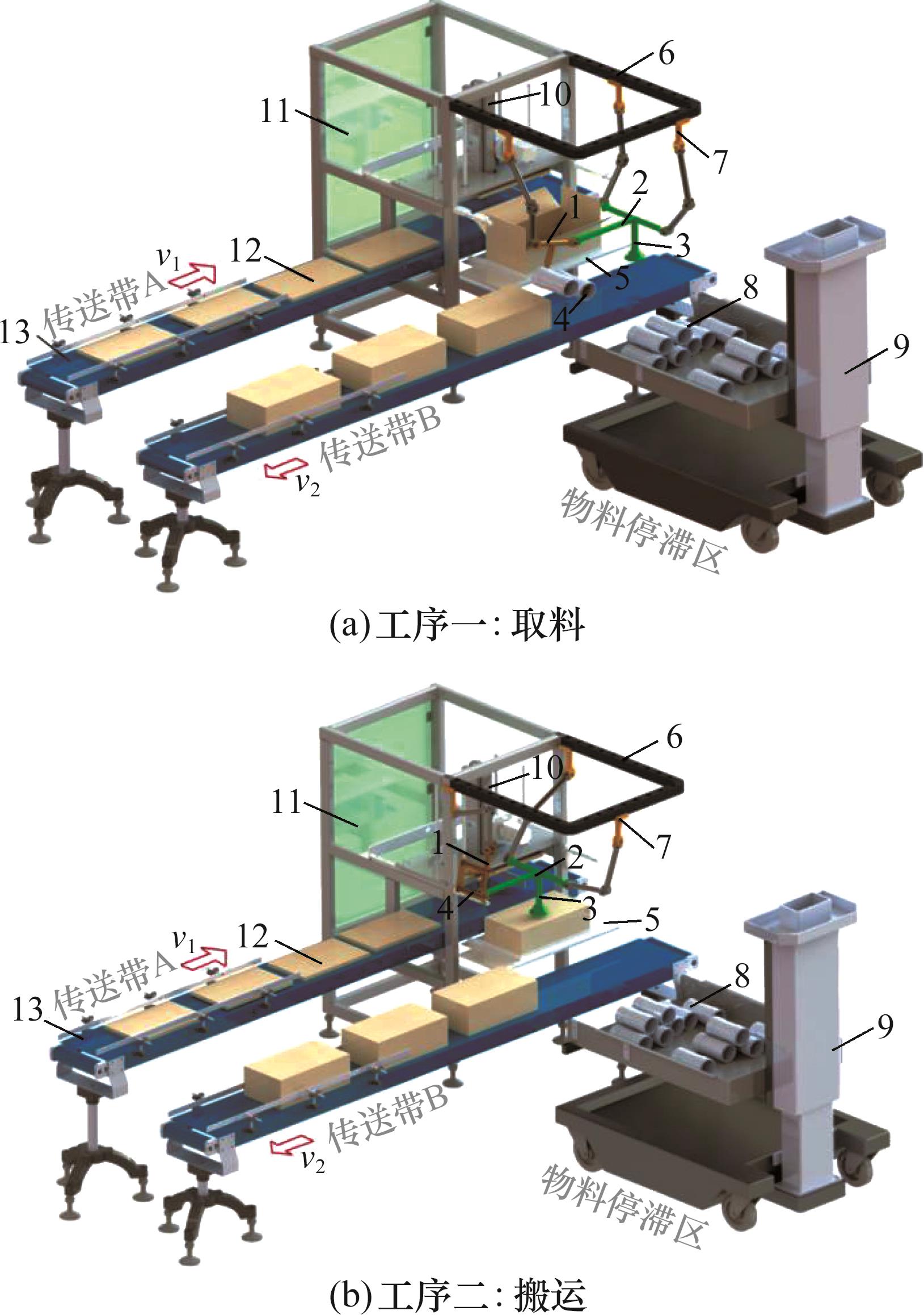
Fig.15 Workflow diagram of APM-PM
| [1] | KRUT S, COMPANY O, BENOIT M, et al. A New Parallel Mechanism for Scara Motions[C]∥ Proceedings of the 2003 IEEE International Conference on Robotics and Automation(ICRA 2003). New York, 2003:1875-1880. |
| [2] | GHAFFARI H, PAYEGANEH G, ARBABTAFTI M. Kinematic Design of a Novel 4-DOF Parallel Mechanism for Turbine Blade Machining[J]. The International Journal of Advanced Manufacturing Technology, 2014, 74(5): 729-739. |
| [3] | 贺磊盈, 涂叶凯, 叶伟, 等. 一种可整周回转的新型3T1R并联机构运动学分析[J]. 机械工程学报, 2018, 54(11): 151-160. |
| HE Leiying, TU Yekai, YE Wei, et al. Kinematics Analysis of a Novel 3T1R Parallel Manipulator with Full Rotational Capability[J]. Journal of Mechanical Engineering, 2018, 54(11): 151-160. | |
| [4] | BOURI M, CLAVEL R. The Linear Delta: Developments and Applications[C]∥ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics). Munich, 2010: 1-8. |
| [5] | PRAUSE I, CHARAF EDDINE S, et al. Comparison of Parallel Kinematic Machines with Three Translational Degrees of Freedom and Linear Actuation[J]. Chinese Journal of Mechanical Engineering, 2015, 28(4): 841-850. |
| [6] | MAZARE M, TAGHIZADEH M, RASOOL NAJAFI M. Kinematic Analysis and Design of a 3-DOF Translational Parallel Robot[J]. International Journal of Automation and Computing, 2017, 14(4): 432-441. |
| [7] | 吴砚博. 多模式机构模式切换力平稳性分析与冗余驱动优选研究[D]. 秦皇岛:燕山大学, 2023. |
| WU Yanbo. Study on The Stability Analysis of Mode Switching Force and Redundant Drive Optimization of Multimode Mechanism[D]. Qinhuangdao:Yanshan University, 2023. | |
| [8] | HUNT K. Kinematic Geometry of Mechanism[M]. Oxford: Clarendon Press, 1990. |
| [9] | ZLATANOV D, BONEV I, GOSSELIN C. Constraint Singularities as C-space Singularities[M]∥Advances in Rokot Kinematics. Dordrecht: Springer, 2002. |
| [10] | YE Wei, FANG Yuefa, GUO Sheng, et al. Two Classes of Reconfigurable Parallel Mechanisms Constructed with Multi-diamond Kinematotropic Chain[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(18): 3319-3330 |
| [11] | KONG Xianwen. Reconfiguration Analysis of a 4-DOF 3-RER Parallel Manipulator with Equilateral Triangular Base and Moving Platform[J]. Mechanism and Machine Theory, 2016, 98: 180-189. |
| [12] | 沈惠平,潘海月,李菊,等. 运动解耦且位置正解符号化的三维平移操作手:中国,202310760734.9[P]. 2023-08-29. |
| SHEN Huiping, PAN Haiyue, LI Ju, et al . A 3 -DOF Translational Manipulator with Motion Decoupling and Symbolic Forward Position Solutions:China, 202310760734.9[P]. 2023-08-29. | |
| [13] | 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012. |
| YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology[M]. Beijing: Science Press, 2012 | |
| [14] | 沈惠平, 邓嘉鸣, 李菊, 等. 少维输入-多维期望运动输出并联机构及其应用[J]. 机械设计与制造工程, 2013, 42(6): 1-4. |
| SHEN Huiping, DENG Jiaming, LI Ju, et al. Fewer Inputs-more Expected Outputs Parallel Mechanisms and Application[J]. Machine Design and Manufacturing Engineering, 2013, 42(6): 1-4. | |
| [15] | 沈惠平, 李菊, 朱小蓉, 等. 基于最优路径的并联机构自由度计算方法及其新公式[J]. 机械工程学报, 2024, 60(19): 40-52. |
| SHEN Huiping, LI Ju, ZHU Xiaorong, et al. New Method and Formula for Degree-of-freedom Calculation of Parallel Mechanism Based on Optimal Paths[J]. Journal of Mechanical Engineering, 2024, 60(19): 40-52. | |
| [16] | 沈惠平, 李菊, 吴广磊, 等. 并联机器人机构的拓扑结构优化[M]. 北京: 高等教育出版社, 2025. |
| SHEN Huiping, LI Ju, WU Guanglei, et al. Topological Structure Optimization for Parallel Robotic Mechanisms[M]. Beijing: Higher Education Press, 2025. | |
| [17] | 沈惠平. 并联机器人机构拓扑分析: 方法与技巧及应用[M]. 南京: 江苏凤凰教育出版社, 2025. |
| SHEN Huiping. Topological Analysis for Parallel Robotic Mechanisms[M]. Nanjing:Jiangsu Phoenix Education Publishing, Ltd,, 2025. | |
| [18] | 杨廷力. 机械系统基本理论: 结构学·运动学·动力学[M]. 北京: 机械工业出版社, 1996. |
| YANG Tingli. Basic Theory of Mechanical System: Structure, Kinematics and Dynamics[M]. Beijing: China Machine Press, 1996. | |
| [19] | 沈惠平. 机器人机构拓扑特征运动学[M]. 北京: 高等教育出版社, 2021. |
| SHEN Huiping. Topological Characteristics-based Kinematics for Robotic Mechanisms[M]. Beijing: Higher Education Press, 2021. | |
| [20] | 王佳睿, 张德强. 包装机PVC夹持步进装置同步带传动机构建模与动态特性分析[J]. 机械设计与制造, 2024(10): 203-208. |
| WANG Jiarui, ZHANG Deqiang. Modeling and Dynamic Characteristics Analysis of Synchronous Belt Transmission Mechanism in PVC Clamping and Stepping Device for Packaging Machine[J]. Machinery Design & Manufacture, 2024(10): 203-208. |
| [1] |
LI Meng-Lei, GU Yo-Qin, ZHANG Hua-Liang, LIU Li-Qin, DU Juan, WEN Chu-Hua, LAN Guo-Sheng.
Parallel Mechanism Structure Optimization Design Based on Multi-objective Differential Evolution Algorithm
[J]. J4, 201016, 21(16): 1915-1920.
|
| [2] |
LU Kai-Jiang, SHI Dun-Beng, ZHANG Feng-Chao.
Dynamics Optimization Design of Planar 3-DOF Parallel Mechanism
[J]. J4, 201016, 21(16): 1926-1931.
|
| [3] |
ZHAN Xiao-Lei, XIN Hong-Bing, HAN Shi-·Bi-De- Lan-Te-Shi.
Kinematics Simulation of MOTOMAN-HP3 Robot Based on Virtual Reality
[J]. J4, 201016, 21(16): 1952-1954,1998.
|
| [4] | LAI Rongshen, ZHU Xiaoteng, QUAN Yunqing, MIAO Kefei, YE Shaogan, BAO Yue, LIU Huixiang, ZHAO Shoujun. Research on Vibration and Lubrication Characteristics of Piston Pumps with Coupled Slipper Pair and Valve Plate Pair Interactions [J]. China Mechanical Engineering, 2026, 37(2): 275-284. |
| [5] | ZHANG Chenchen, RUAN Jian, LI Sheng. Numerical Simulation and Experimental Verification of Flow Pulsation and Outlet Pressure of Roller Piston Pump [J]. China Mechanical Engineering, 2026, 37(2): 304-314. |
| [6] | MO Shuai, LI Yaxin, WU Shengyang, ZHAO Xinhao, CHEN Sujiao, PENG Nanjiang, ZHANG Wei. Nonlinear Dynamics Characteristics of Non-circular Planetary Gear Systems [J]. China Mechanical Engineering, 2026, 37(2): 353-360. |
| [7] | FENG Shengquan, QU Shuwei, LI Ruiqin, YAO Wei, MA Chunsheng. Design of a 3(rU)PU Metamorphic Parallel Mechanism Based on Variable Axis Kinematic Pairs [J]. China Mechanical Engineering, 2026, 37(2): 361-373. |
| [8] | JIANG Xuetao, YANG Yong, ZHU Jihong, FENG Hao, PAN Shunyang. Buckling Topological Design of Reinforced Plate/Shell Based on Bionic Diffusion Growth-driven Method [J]. China Mechanical Engineering, 2026, 37(2): 452-465. |
| [9] | WANG Shijie, DUAN Guolin. Modelling of Time-varying Extrusion Systems for Fabrication of FGMs Parts by Direct Ink Writing Processes [J]. China Mechanical Engineering, 2026, 37(2): 466-475. |
| [10] | WANG Jiantao, YANG Chao, LIU Shuaishuai, ZHANG Lipeng, WANG Qijun. Intelligent Vehicle Road Recognition Considering System Noises and Unknown Load Weights [J]. China Mechanical Engineering, 2026, 37(2): 498-507. |
| [11] | WANG Hao, LUO Haodong, SHI Yazhong, WANG Liwen, ZHANG Wei, WANG Zhong. A Topology Optimization Method Based on End-to-end Deep Learning Framework TOPO-U-Net [J]. China Mechanical Engineering, 2026, 37(1): 174-183. |
| [12] | YANG Mingxing, SHEN Jiale, GAO Peng, ZHANG Xing, WANG Junxiang. Design of Continuum Robots and Compensation Strategies for Losses of Guide Paths [J]. China Mechanical Engineering, 2025, 36(12): 2820-2828. |
| [13] | WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2885-2893. |
| [14] | NI Tao, ZHAO Yahui, ZHAO Zeren, YANG Kaiqiang. Dynamics Modeling and Base Dynamics Parameter Determination of 6-UPRU Parallel Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2911-2919. |
| [15] | LUO Min, HUANG Congjian, LI Qiaozheng, XU Tingting, FU Yanbo. Investigation of Factors Influencing Expandable Tubes Milling Based on SPH-FEM Coupling Algorithms [J]. China Mechanical Engineering, 2025, 36(12): 2927-2935. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||