

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (2): 498-507.DOI: 10.3969/j.issn.1004-132X.2026.02.024
WANG Jiantao( ), YANG Chao, LIU Shuaishuai, ZHANG Lipeng(), WANG Qijun
), YANG Chao, LIU Shuaishuai, ZHANG Lipeng(), WANG Qijun
Received:2024-06-13
Revised:2026-01-14
Online:2026-02-25
Published:2026-03-13
Contact:
ZHANG Lipeng
王建涛(), 杨超, 刘帅帅, 张利鹏(), 王启军
通讯作者:
张利鹏
作者简介:王建涛,男,1988年生,讲师。研究方向为智能车底盘协同控制。E-mail: wjt@ysu.edu.cn基金资助:CLC Number:
WANG Jiantao, YANG Chao, LIU Shuaishuai, ZHANG Lipeng, WANG Qijun. Intelligent Vehicle Road Recognition Considering System Noises and Unknown Load Weights[J]. China Mechanical Engineering, 2026, 37(2): 498-507.
王建涛, 杨超, 刘帅帅, 张利鹏, 王启军. 考虑系统噪声与载重未知的智能车路况辨识[J]. 中国机械工程, 2026, 37(2): 498-507.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.02.024
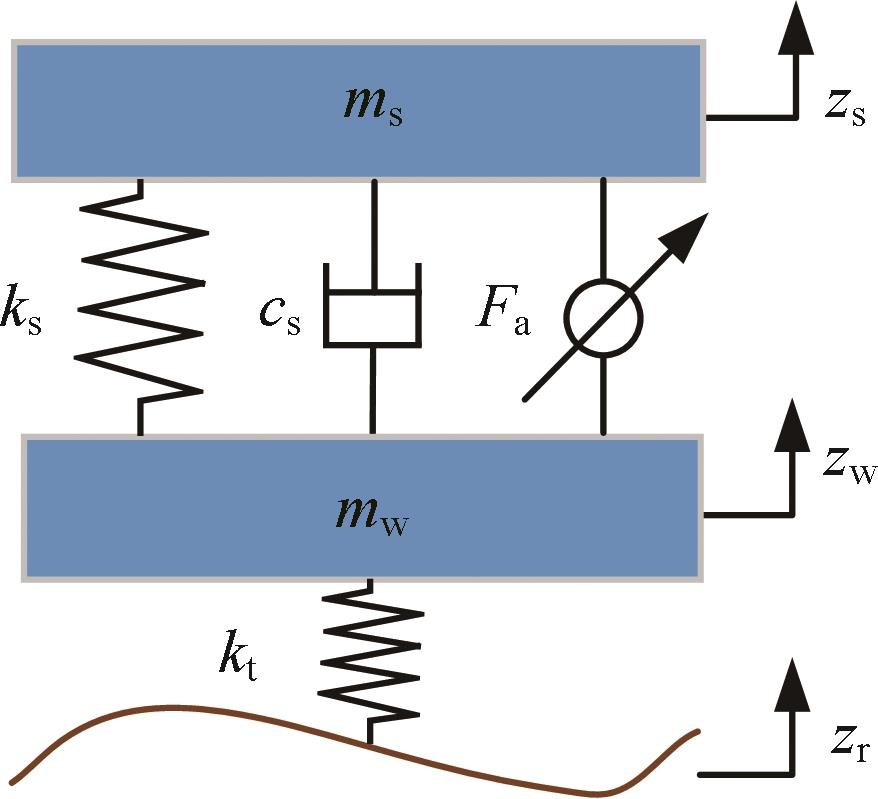
Fig.1 1/4 Vehicle model
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 簧上质量ms/kg | 242.6 | 轮胎刚度kt/(kN·m | 182 |
| 车轮质量mw/kg | 49.2 | 悬架阻尼cs/(N·s·m | 1500 |
| 弹簧刚度ks/(kN·m | 20 | 主动力Fa/N | 0 |
Tab.1 Basic vehicle parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 簧上质量ms/kg | 242.6 | 轮胎刚度kt/(kN·m | 182 |
| 车轮质量mw/kg | 49.2 | 悬架阻尼cs/(N·s·m | 1500 |
| 弹簧刚度ks/(kN·m | 20 | 主动力Fa/N | 0 |
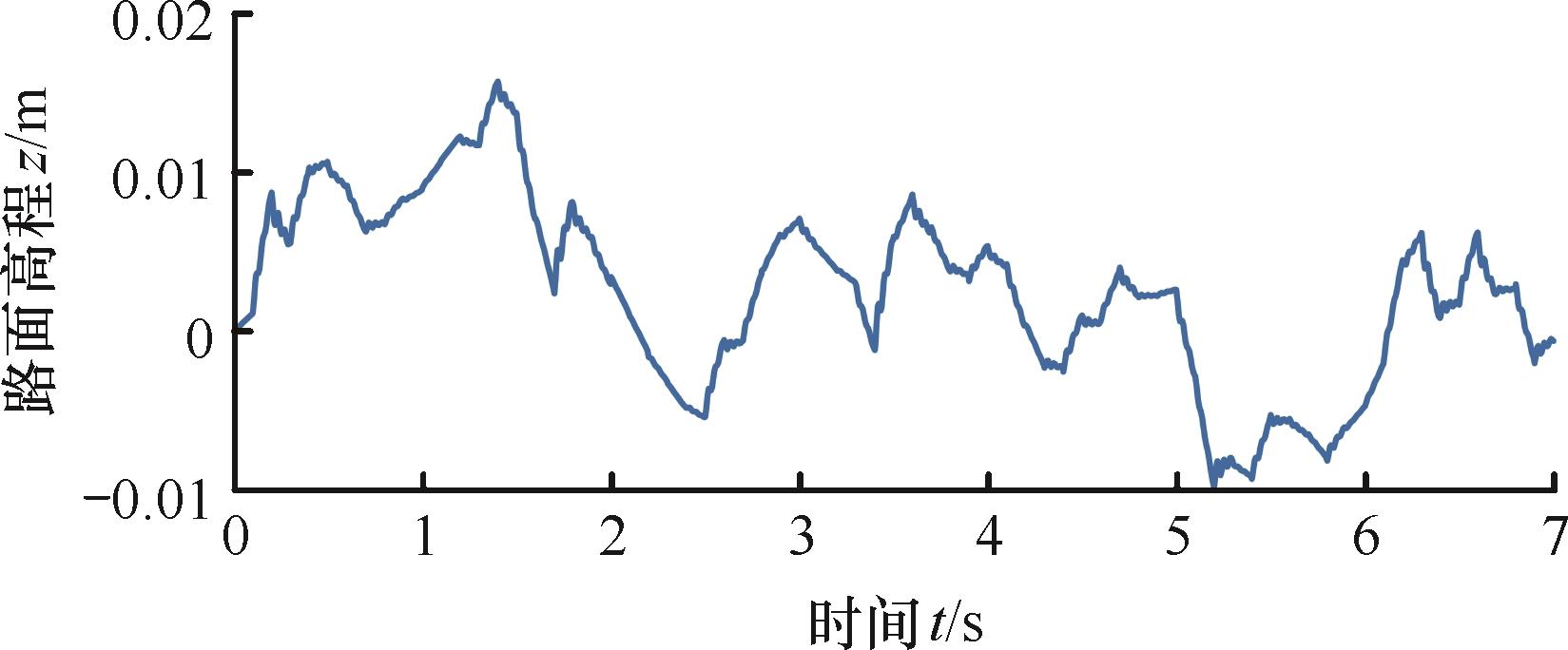
Fig.2 The random road excitation of class C
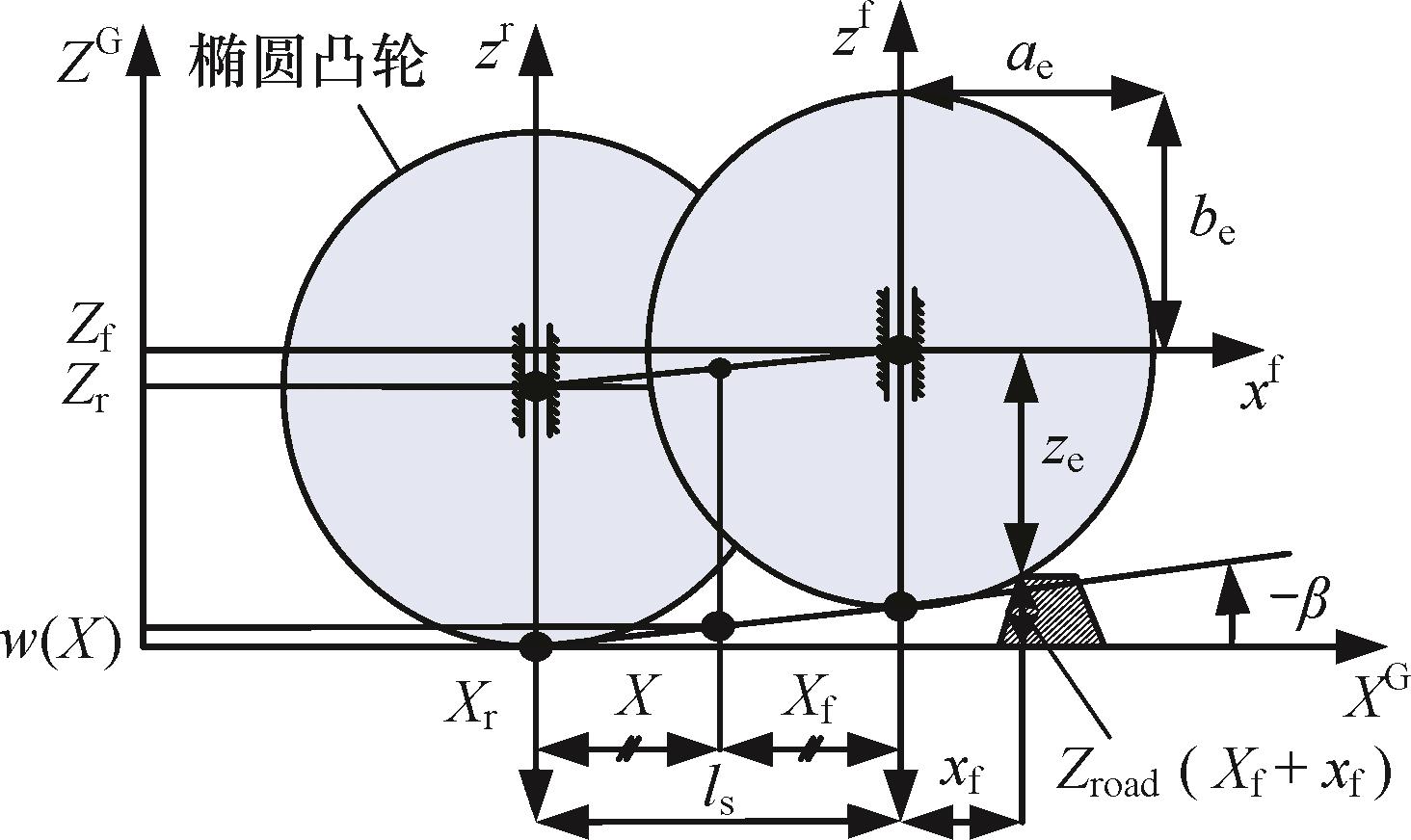
Fig.3 Tandem elliptic cam model
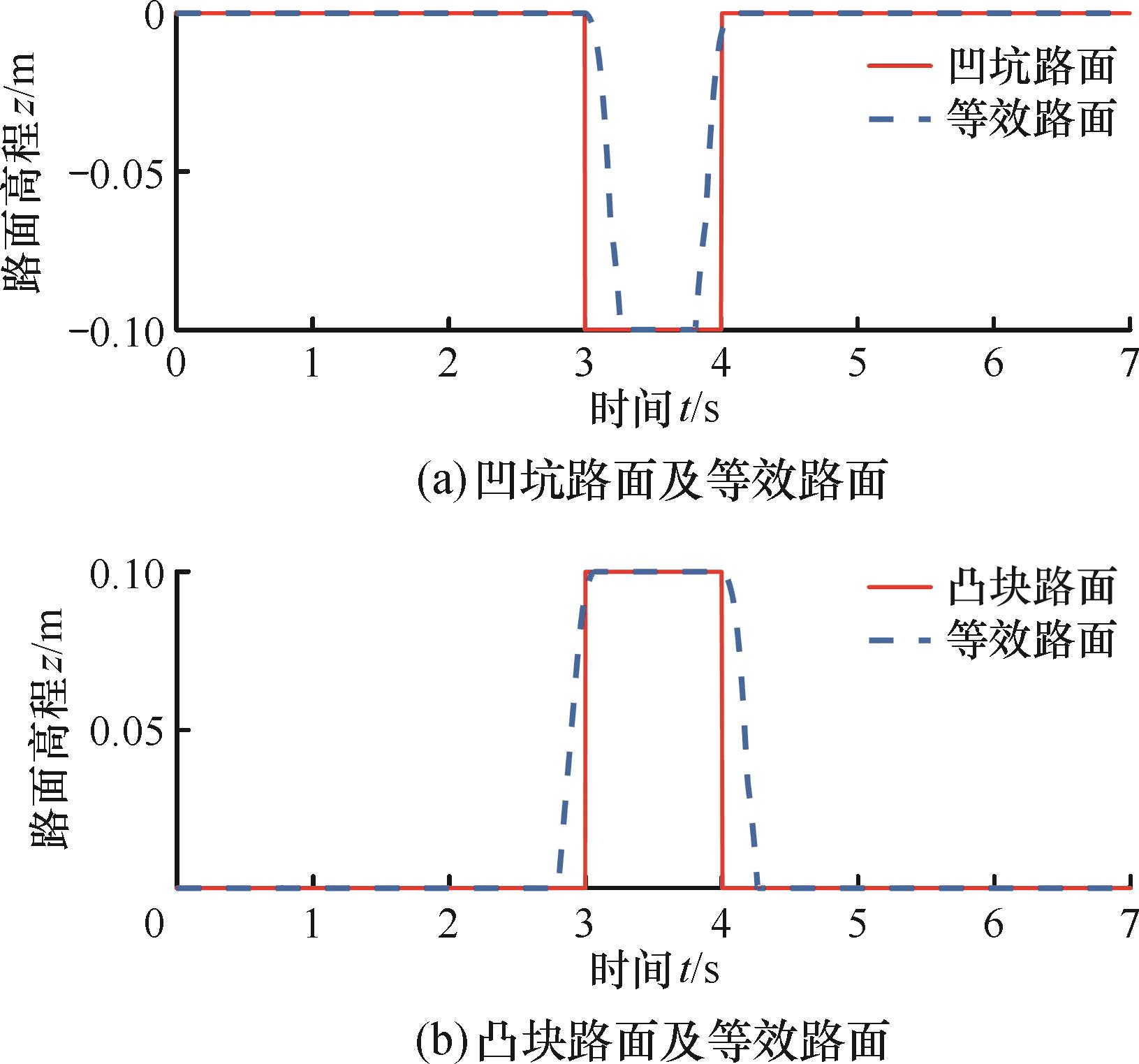
Fig.4 Potholed road and bumpy road
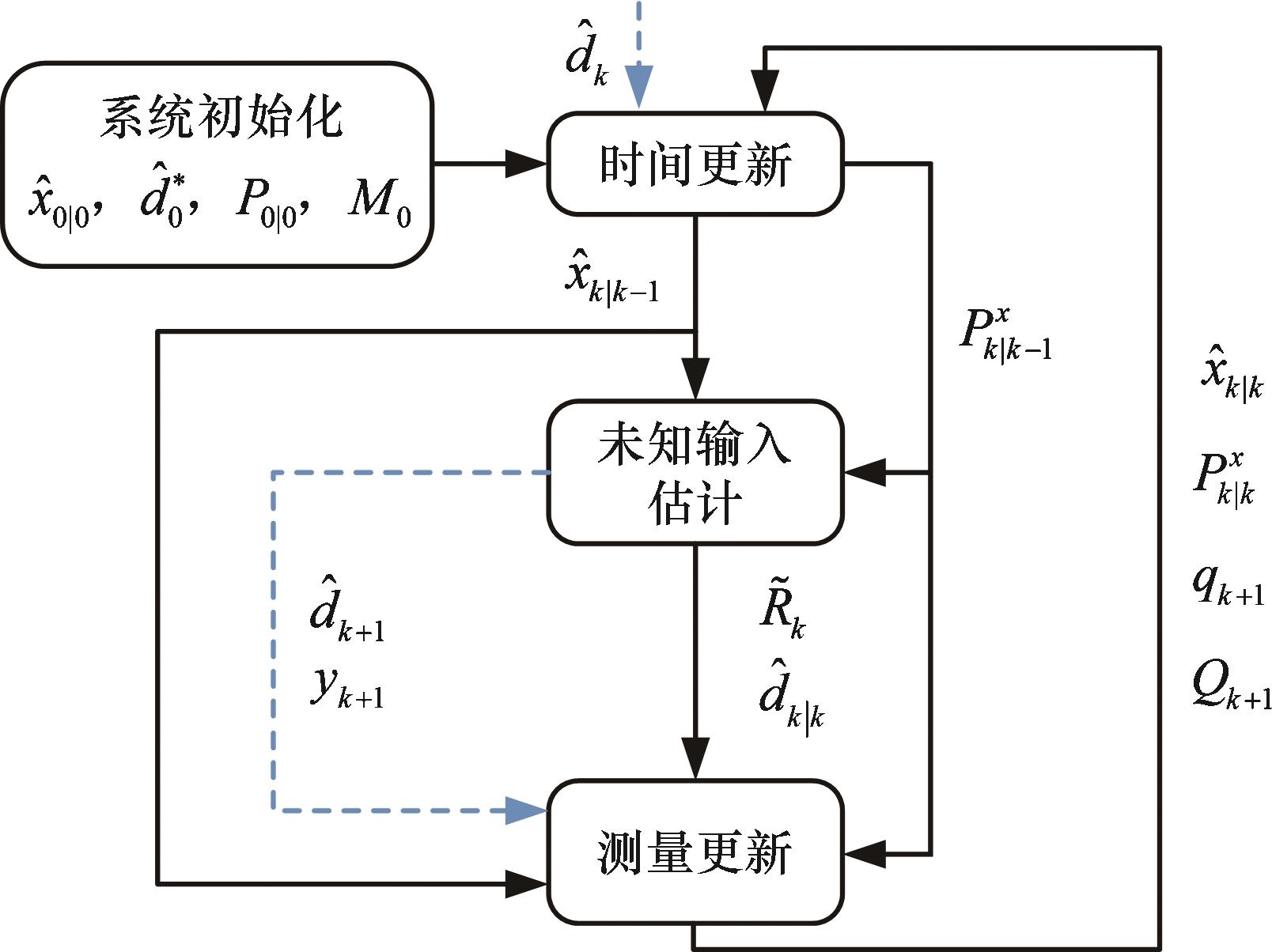
Fig.5 Flow chart of ARTSF algorithm
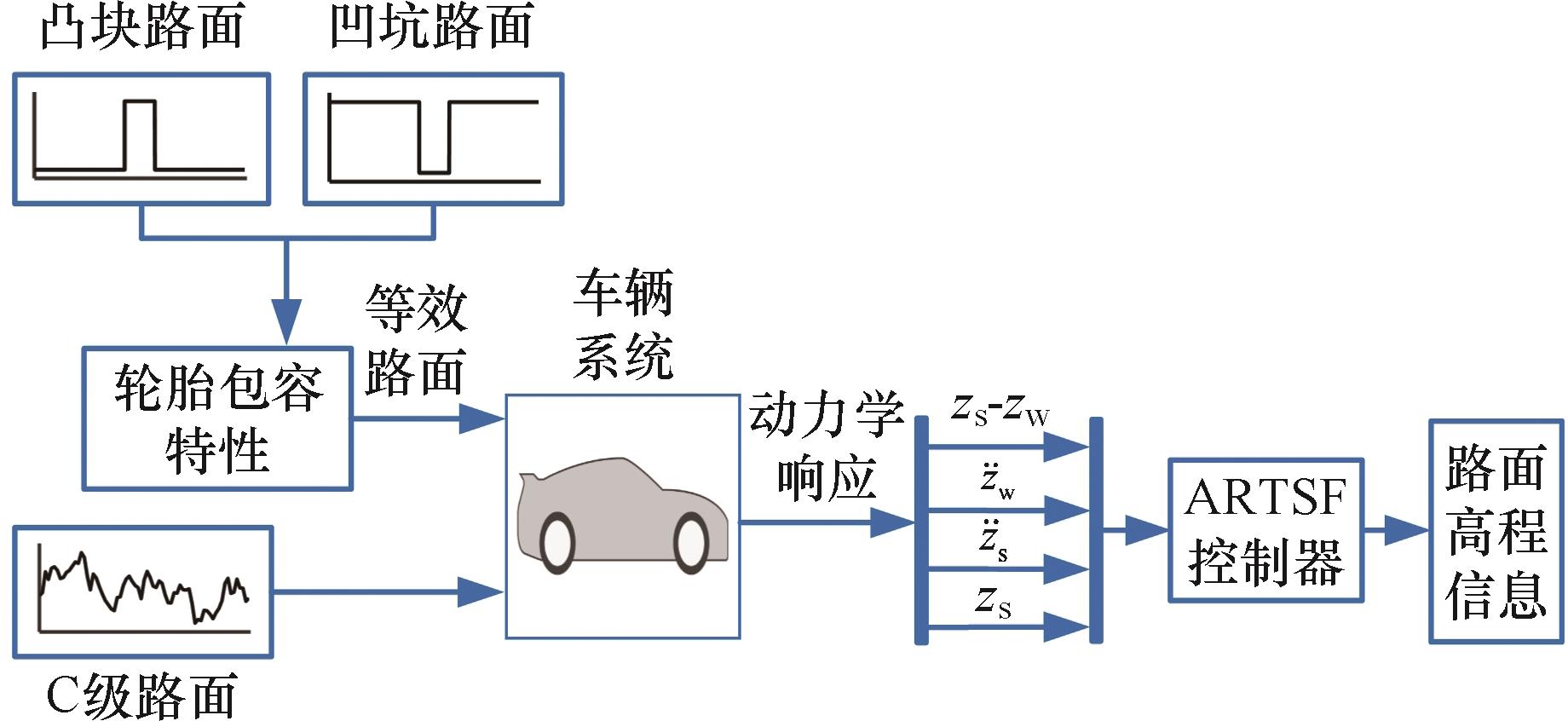
Fig.6 Flow chart of road recognition based on ARTSF algorithm
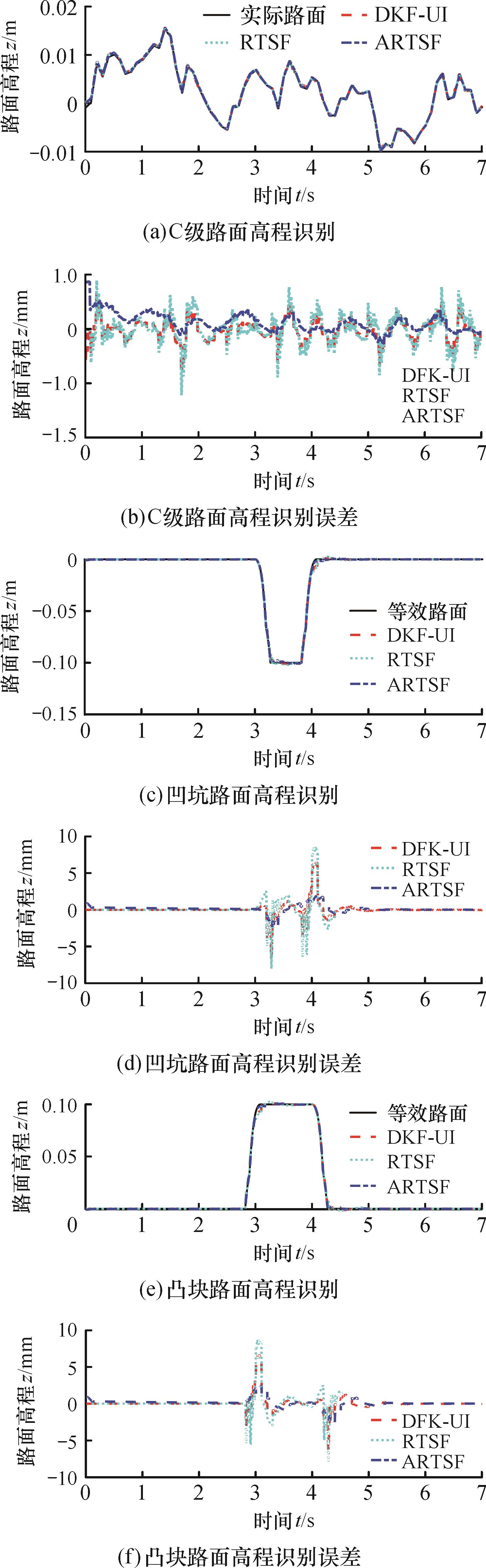
Fig.7 Road recognition without noise
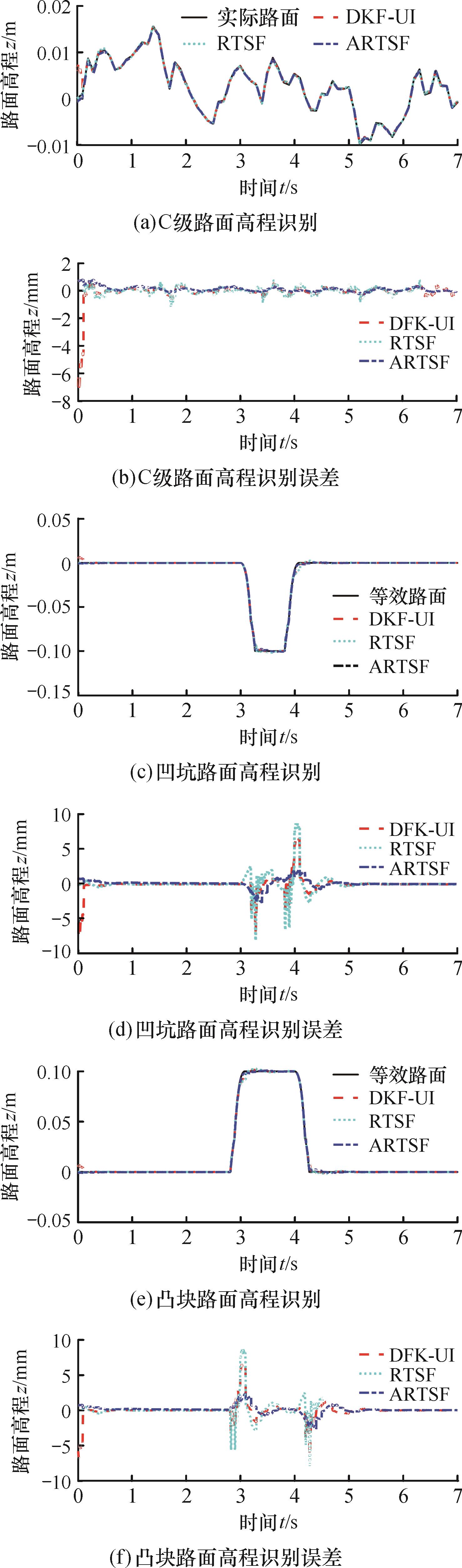
Fig.8 Road recognition with noise
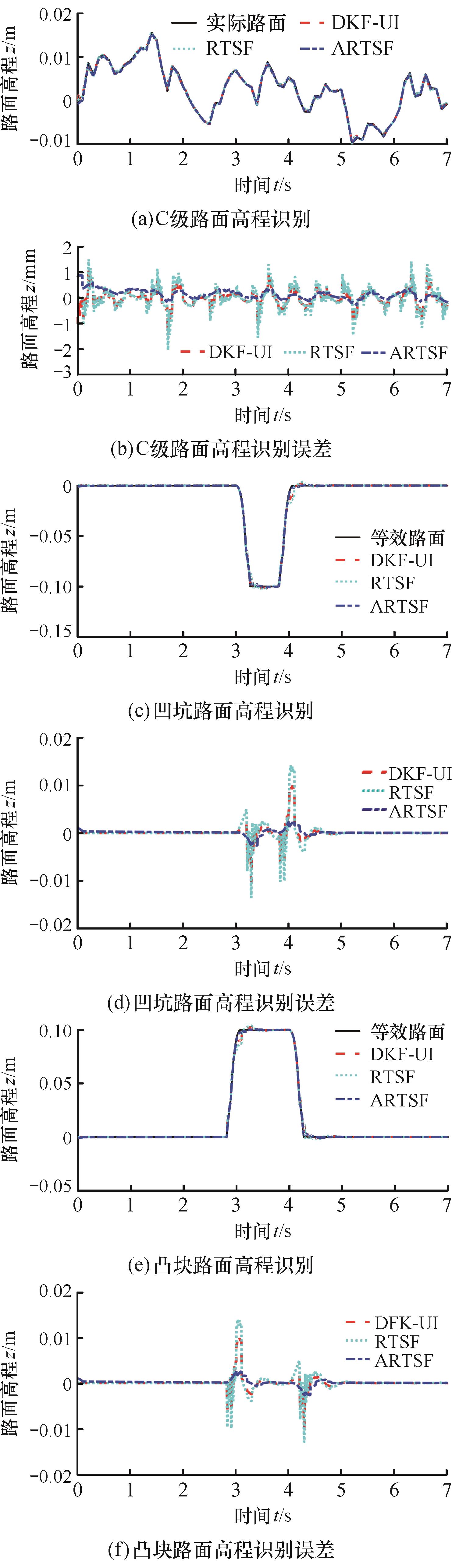
Fig.9 Road recognition with unknown load weight
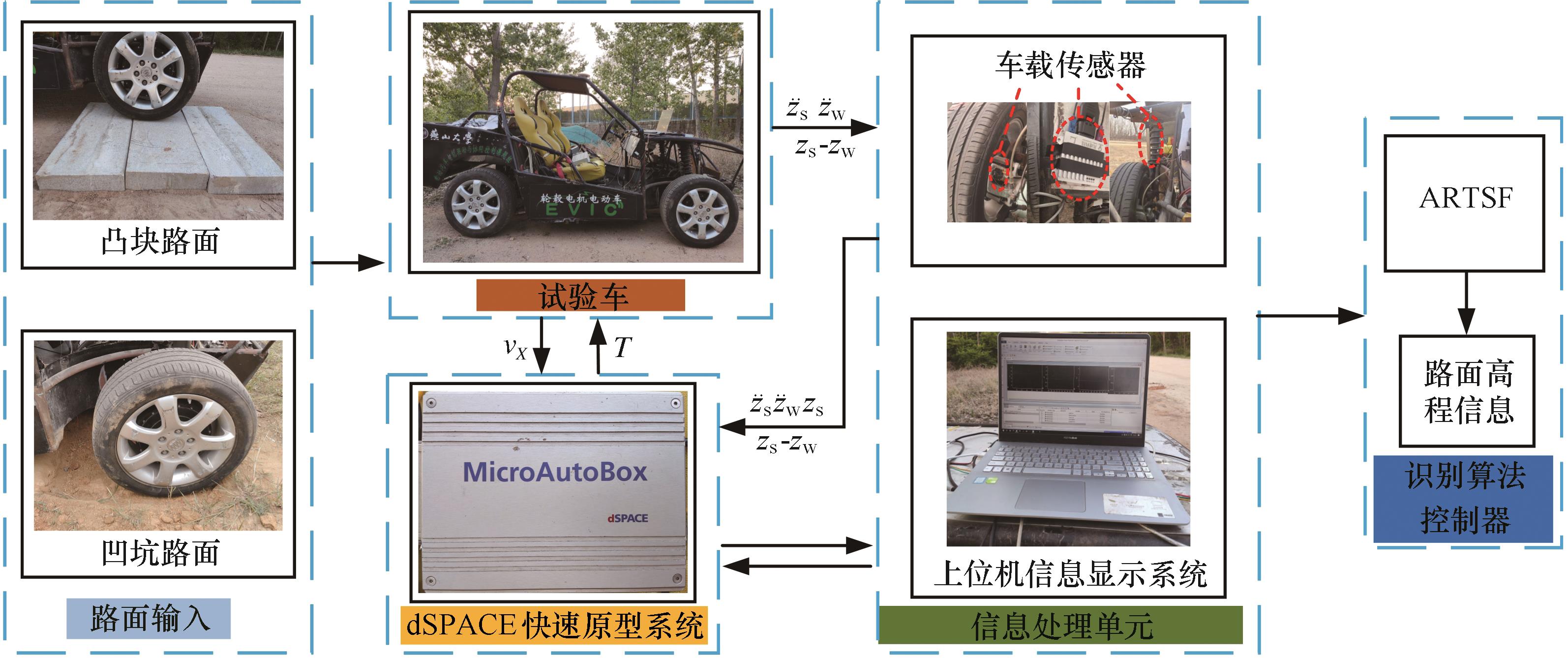
Fig.10 Test scheme of road recognition
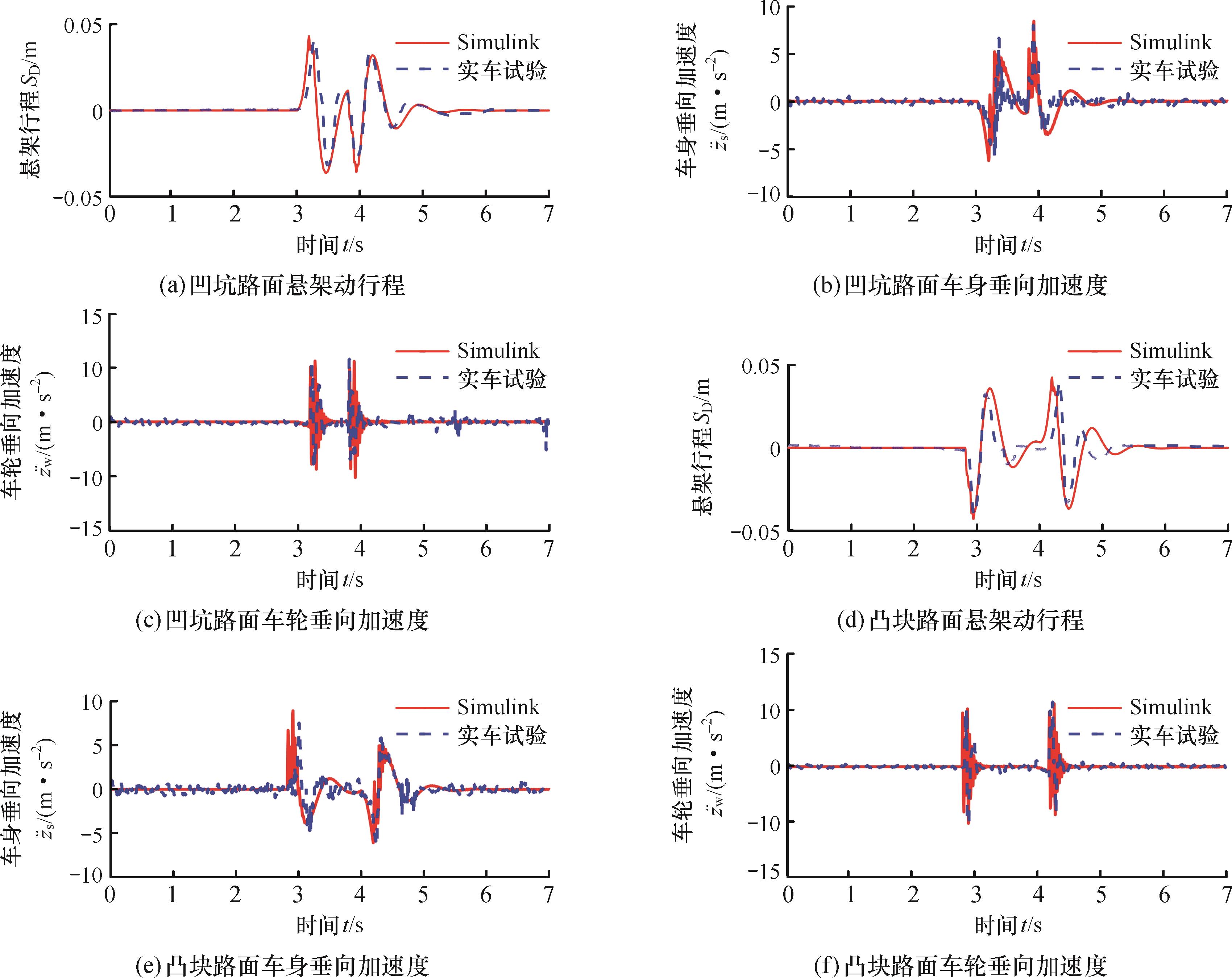
Fig.11 Vehicle state parameters
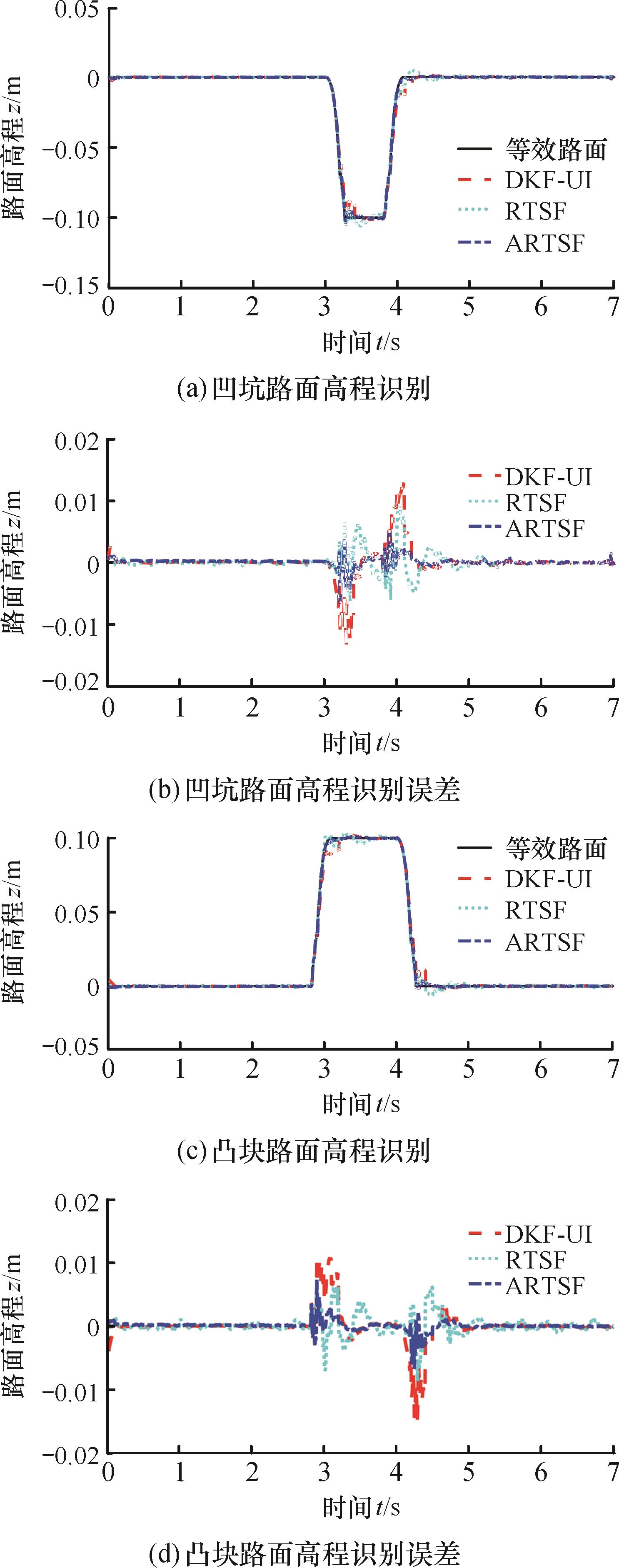
Fig.12 Test results
| [1] | 刁勤晴, 张雅妮, 朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J]. 中国机械工程, 2019, 30(12): 1445-1452. |
| DIAO Qinqing, ZHANG Yani, ZHU Lingyun. A Lateral and Longitudinal Fuzzy Control of Intelligent Vehicles with Double Preview Points for Large Curvature Roads[J]. China Mechanical Engineering, 2019, 30(12): 1445-1452. | |
| [2] | GUO Jinghua, LI Wenchang, WANG Jingyao, et al. Safe and Energy-efficient Car-following Control Strategy for Intelligent Electric Vehicles Considering Regenerative Braking[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7070-7081. |
| [3] | FAN Lili, ZENG Changxian, MENG Zonglin, et al. A Secured Vehicle Brain: DAO-based Collaborative Perception and Decision-making Systems for Intelligent Vehicles in CPSS[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 52-54. |
| [4] | 张利鹏, 刘欣, 刘帅帅, 等. 双模耦合驱动智能电动汽车对开坡道行驶稳定性控制[J]. 中国公路学报, 2024, 37(3): 204-215. |
| ZHANG Lipeng, LIU Xin, LIU Shuaishuai, et al. Driving Stability Control of a Dual-mode Coupling Drive Intelligent Electric Vehicle on Bisectional Slopes[J]. China Journal of Highway and Transport, 2024, 37(3): 204-215. | |
| [5] | DING Renkai, WANG Ruocheng, MENG Xiangpeng, et al. Intelligent Switching Control of Hybrid Electromagnetic Active Suspension Based on Road Identification[J]. Mechanical Systems and Signal Processing, 2021, 152: 107355. |
| [6] | YIN Guodong, WANG Zhen, ZHANG Ning, et al. Improving Stability and Comfort of an In-wheel Motor Drive Electric Vehicle via Active Suspensions[J]. International Journal of Heavy Vehicle Systems, 2019, 26(3/4): 494. |
| [7] | JIN Xianjian, WANG Jiadong, HE Xiongkui, et al. Improving Vibration Performance of Electric Vehicles Based on In-wheel Motor-active Suspension System via Robust Finite Frequency Control[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 1631-1643. |
| [8] | HAN Yi, WANG Biyao, GUAN Tian, et al. Research on Road Environmental Sense Method of Intelligent Vehicle Based on Tracking Check[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 1261-1275. |
| [9] | GUO Chence. Analysis of Unstructured Road Information Recognition Methods for Unmanned Vehicles[C]∥2019 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS). Singapore, 2019: 84-89. |
| [10] | 邹俊逸, 刘畅, 郭文彬, 等. 面向智能车辆的路面凹凸障碍物识别方法研究[J]. 中国机械工程, 2024, 35(6): 951-961. |
| ZOU Junyi, LIU Chang, GUO Wenbin, et al. Research on Road Uneven Obstacle Recognition Method for Intelligent Vehicles[J]. China Mechanical Engineering, 2024, 35(6): 951-961. | |
| [11] | KAVIANIPOUR O, MONTAZERI-GH M, MOAZAMI⁃ |
| ZADEH M. Road Profile Measurement Using the Two Degrees of Freedom Response-type Mechanism[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2015, 229(6): 1074-1087. | |
| [12] | LEE J H, LEE S H, KANG D K, et al. Development of a 3D Road Profile Measuring System for Unpaved Road Severity Analysis[J]. International Journal of Precision Engineering and Manufacturing, 2017, 18(2): 155-162. |
| [13] | 赵健, 李雅欣, 朱冰, 等. 基于激光雷达的纵向坡路动态可行驶性预测[J]. 中国公路学报, 2019, 32(6): 147-157. |
| ZHAO Jian, LI Yaxin, ZHU Bing, et al. Dynamic Traversability Prediction on a Longitudinal Ramp Based on Lidar[J]. China Journal of Highway and Transport, 2019, 32(6): 147-157. | |
| [14] | LI H T, TODD Z, BIELSKI N, et al. 3D Lidar Point-cloud Projection Operator and Transfer Machine Learning for Effective Road Surface Features Detection and Segmentation[J]. The Visual Computer, 2022, 38(5): 1759-1774. |
| [15] | 孙朋朋, 赵祥模, 蒋渊德, 等. 降雨条件对车载激光雷达性能影响的试验研究[J]. 中国公路学报, 2022, 35(11): 318-328. |
| SUN Pengpeng, ZHAO Xiangmo, JIANG Yuande, et al. Experimental Study of Influence of Rain on Performance of Automotive LiDAR[J]. China Journal of Highway and Transport, 2022, 35(11): 318-328. | |
| [16] | 刘浪, 张志飞, 鲁红伟, 等. 基于增广卡尔曼滤波并考虑车辆加速度的路面不平度识别[J]. 汽车工程, 2022, 44(2): 247-255. |
| LIU Lang, ZHANG Zhifei, LU Hongwei, et al. Road Roughness Identification Based on Augmented Kalman Filtering with Consideration of Vehicle Acceleration[J]. Automotive Engineering, 2022, 44(2): 247-255. | |
| [17] | KANG S W, KIM J S, KIM G W. Road Roughness Estimation Based on Discrete Kalman Filter with Unknown Input[J]. Vehicle System Dynamics, 2019, 57(10): 1530-1544. |
| [18] | 丁仁凯, 蒋俞, 汪若尘, 等. 考虑未知输入的主动悬架路面高程与等级识别研究[J]. 汽车工程, 2021, 43(2): 278-286. |
| DING Renkai, JIANG Yu, WANG Ruochen, et al. Research on Road Elevation and Grade Identification of Active Suspension Considering Unknown Inputs[J]. Automotive Engineering, 2021, 43(2): 278-286. | |
| [19] | ZHAO Jing, WANG Xiaowei, WONG P K, et al. Multi-objective Frequency Domain-constrained Static Output Feedback Control for Delayed Active Suspension Systems with Wheelbase Preview Information[J]. Nonlinear Dynamics, 2021, 103(2): 1757-1774. |
| [20] | 黄俊明, 杨国, 杨蓉. 轮胎包容特性滤波下的主动悬架预瞄自抗扰控制研究[J]. 重庆理工大学学报(自然科学), 2022, 36(1): 39-50. |
| HUANG Junming, YANG Guo, YANG Rong. Preview Active Disturbance Rejection Control of Active Suspension Based on Tire Enveloping Properties[J]. Journal of Chongqing University of Technology (Natural Science), 2022, 36(1): 39-50. | |
| [21] | KIM G, LEE S Y, OH J S, et al. Deep Learning-based Estimation of the Unknown Road Profile and State Variables for the Vehicle Suspension System[J]. IEEE Access, 2021, 9: 13878-13890. |
| [22] | ZHANG Zhiming, SUN Chao, BRIDGELALL R, et al. Road Profile Reconstruction Using Connected Vehicle Responses and Wavelet Analysis[J]. Journal of Terramechanics, 2018, 80: 21-30. |
| [23] | QIN Yechen, XIANG Changle, WANG Zhenfeng, et al. Road Excitation Classification for Semi-active Suspension System Based on System Response[J]. Journal of Vibration and Control, 2018, 24(13): 2732-2748. |
| [24] | XUE Kai, NAGAYAMA T, ZHAO Boyu. Road Profile Estimation and Half-car Model Identification through the Automated Processing of Smartphone Data[J]. Mechanical Systems and Signal Processing, 2020, 142: 106722. |
| [25] | NI Liwei, MA Fangwu, GE Linhe, et al. Design and Posture Control of a Wheel-legged Robot with Actively Passively Transformable Suspension System[J]. Journal of Mechanisms and Robotics, 2021, 13(1): 011014. |
| [26] | 张利鹏, 段嘉瑶, 苏泰, 等. 电动轮驱动汽车空间稳定性底盘协同控制[J]. 机械工程学报, 2022, 58(10): 209-221. |
| ZHANG Lipeng, DUAN Jiayao, SU Tai, et al. Chassis Cooperative Control of In-wheel Motors Drive Electric Vehicle for Improving Spatial Stability[J]. Journal of Mechanical Engineering, 2022, 58(10): 209-221. | |
| [27] | GILLIJNS S, de MOOR B. Unbiased Minimum-variance Input and State Estimation for Linear Discrete-time Systems[J]. Automatica, 2007, 43(1): 111-116. |
| [1] | ZOU Jinhua1;YANG Yang1;LI Chun1,2;WANG Yuanbo1;LIU Zhongsheng1. Dynamics Response of Wind Turbine Towers under Seismic and Multi Wind Conditions [J]. China Mechanical Engineering, 2019, 30(16): 1940-1949. |
| [2] | Zhu Yili, Jin Chaowu. Maximum Impact Force and Thermal Characteristic Analysis of Double-decker Catcher Bearing Used in High-speed and Heavy-load Conditions [J]. China Mechanical Engineering, 2016, 27(01): 25-31. |
| [3] | E Linzhongyang, Liu Chunchuan, Li Fengming, . Dynamics Characteristic Analysis of Complex Rigid Frame Structure Considering Shear Deformation [J]. China Mechanical Engineering, 2014, 25(14): 1922-1925. |
| [4] | DUO Cheng-Guo, HU Feng, NIE Hong. Research on Dynamics during Catapult Takeoff of Carrier-based Aircraft [J]. China Mechanical Engineering, 2013, 24(4): 522-527. |
| [5] | ZHANG Wei-Zhong-1, ZHANG Bin-2, WU Xiao-Gong-3, SUN Qing-3. #br# #br# Study on Control Effects of Active Control Systems with Time Delays [J]. China Mechanical Engineering, 2013, 24(3): 317-321. |
| [6] | LU Hua-Beng-1, 2, GU Pu-Rong-1, LIU Yong-Shou-1, SUN Bei-2, LI Bao-Hui-1. #br# Dynamics Response Experiment and Analysis of Aviation Pipeline Based on Modal Test [J]. China Mechanical Engineering, 2012, 23(16): 1925-1929. |
| [7] | Sun Libo;Xu Lizhong. Nonlinear Dynamics Analysis of Electromechanical Coupled Micro-plate [J]. J4, 2009, 20(16): 0-2015. |
| [8] |
Liu Shanzeng,;Yu Yueqing;Si Guoning;Liu Qingbo;Yang Jianxin.
Dynamics Analysis of a 3-RRS Flexible Parallel Manipulator [J]. J4, 2009, 20(07): 0-762. |
| [9] | Zhang Suohuai, Zhang Jiangfeng, Li Lei. Research on the Dynamics Characteristics of Inner Planetary Gear Reducer with Three Axes [J]. China Mechanical Engineering, 2007, 18(21): 2532-2534. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||