| [1] |
李小力, 陈威, 闫蓉. 基于BP神经网络的空间轮廓误差自适应补偿 [J]. J4, 201016, 21(16): 1902-1906. |
| [2] |
赵伟, 王志远, 周志立. 载重汽车连续下坡弯道路段制动稳定性仿真研究 [J]. J4, 201016, 21(16): 2010-2015. |
| [3] |
谢冰冰, 赵峰, 郭昕兴, 乔莉, 程思创, 刘晓辉, 张桐舟, 胡伟飞. 基于物理信息神经网络的风电机组塔筒概率疲劳寿命预测方法[J]. 中国机械工程, 2026, 37(5): 1017-1025. |
| [4] |
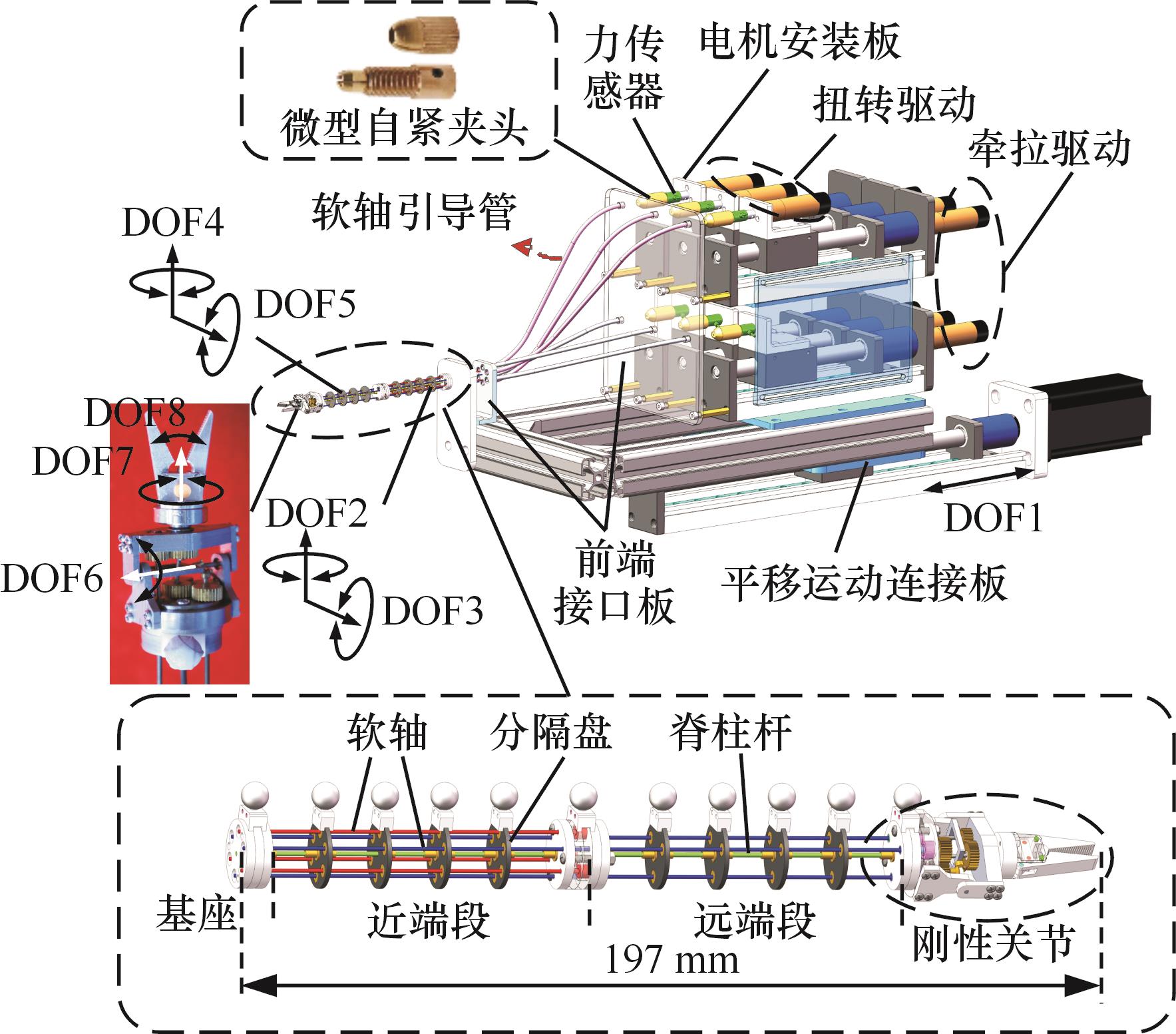
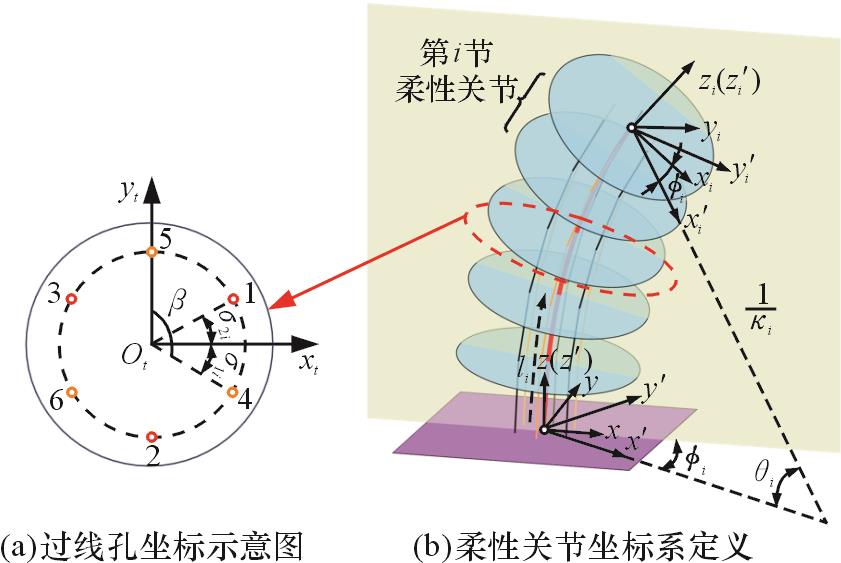
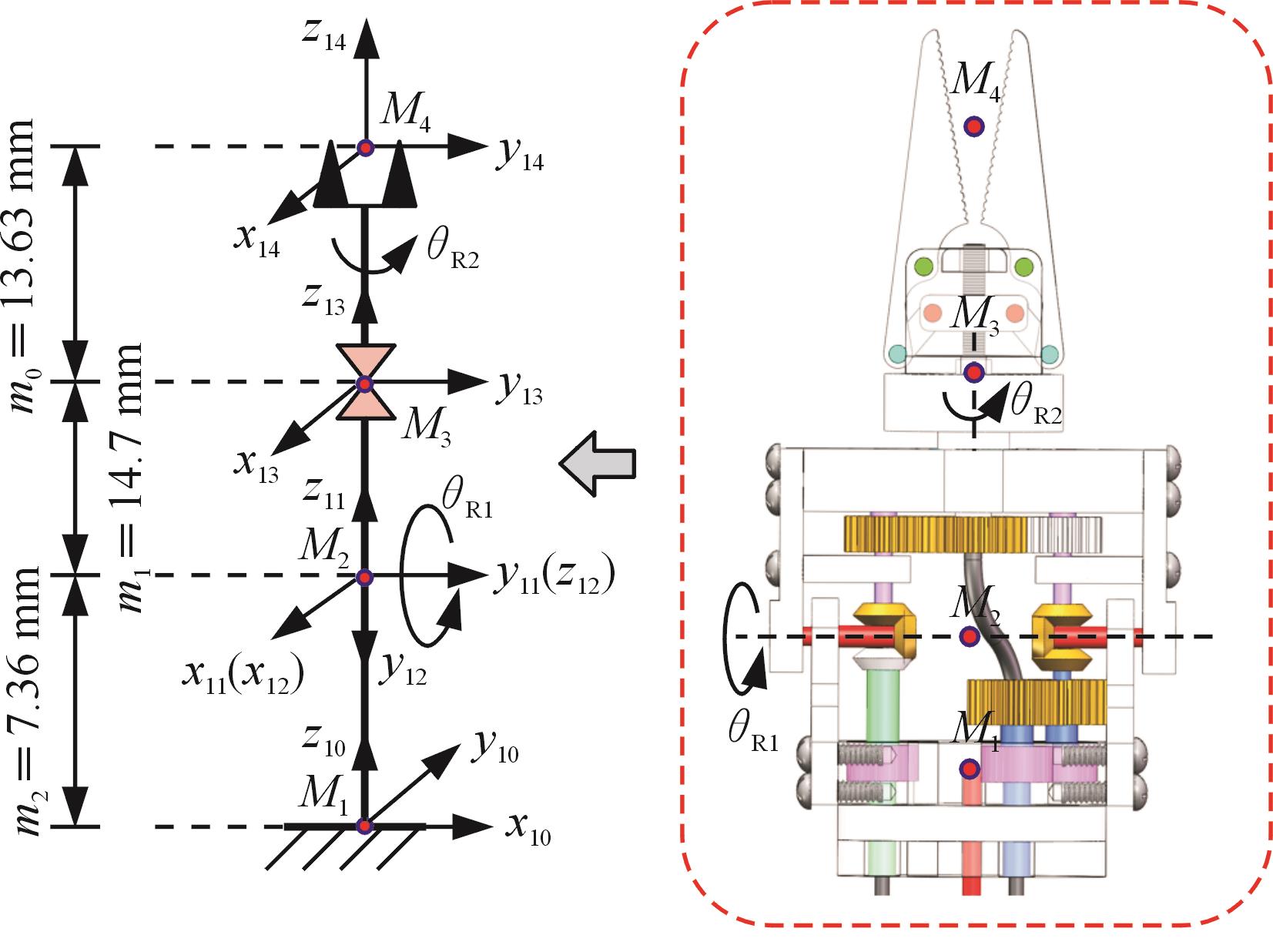
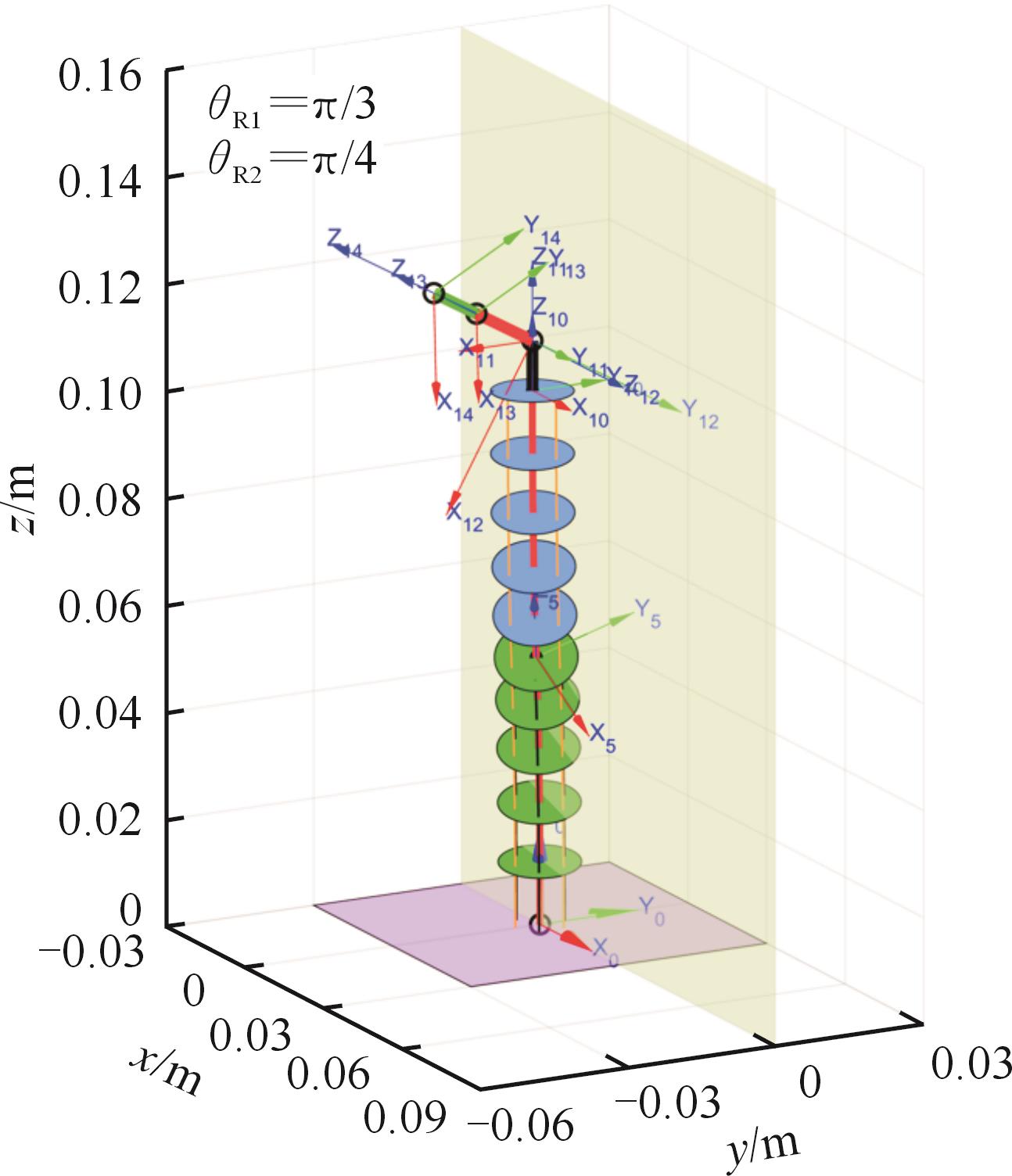
董佳祥, 赵学智, 胡希平, 刘铨权. 一种软轴拉扭协同驱动的新型刚柔混联连续体机器人机构设计与实验验证[J]. 中国机械工程, 2026, 37(5): 1193-1198. |
| [5] |
张冀, 袁海博, 王智璇, 朱思华, 白振华. 物理引导的神经网络模型预测铝带冷轧轧制力[J]. 中国机械工程, 2026, 37(5): 1199-1209. |
| [6] |
胡娅维, 方响, 尹传安, 林子俊, 林小卫. 一种新型的SiC金属氧化物半导体场效应管的寿命预测[J]. 中国机械工程, 2026, 37(4): 959-966. |
| [7] |
李宪华, 尹胜, 邱洵, 杜鹏飞, 宋韬. 基于双流卷积神经网络的表面肌电信号上肢动作识别[J]. 中国机械工程, 2026, 37(3): 697-707. |
| [8] |
王世杰, 段国林. 直写成形工艺制备的功能梯度材料零件时变挤出系统建模[J]. 中国机械工程, 2026, 37(2): 466-475. |
| [9] |
刘洋, 吴庆军, 郭浩, 祁凯飞, 庄蔚敏, 伏广省. 基于多策略改进复合麻雀搜索算法的自冲铆成形质量预测[J]. 中国机械工程, 2026, 37(2): 476-486. |
| [10] |
田立勇, 李鸣昊, 于宁, 杨秀宇. 煤矿掘进工作面锚网自动绑扎装置研究[J]. 中国机械工程, 2026, 37(1): 243-253. |
| [11] |
杨明星, 沈佳乐, 高鹏, 张兴, 王俊翔. 连续体机器人设计与导向路径损失补偿策略[J]. 中国机械工程, 2025, 36(12): 2820-2828. |
| [12] |
王旭浩, 盛卧龙, 吴孟丽, 许贻龙, 赵晓巍, 曹轶然. 可伸缩蛇形臂机器人的设计及运动学建模[J]. 中国机械工程, 2025, 36(12): 2885-2893. |
| [13] |
印峰, 黄欣, 周佳义. 基于流模型的冗余机器人逆运动学解高精度计算[J]. 中国机械工程, 2025, 36(12): 2960-2967. |
| [14] |
张雄, 董乐聪, 王文强, 渠伟瀅, 万书亭. 融合二维卷积与门控循环神经网络的滚动轴承多故障诊断方法[J]. 中国机械工程, 2025, 36(12): 2978-2985. |
| [15] |
陈智博, 李国平, 项四通, 魏燕定. 基于超声谐振挤压膜效应的触觉纹理动态感知及实验研究[J]. 中国机械工程, 2025, 36(11): 2574-2582. |



 ), 刘铨权2,3(
), 刘铨权2,3(