

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (08): 1832-1841.DOI: 10.3969/j.issn.1004-132X.2025.08.018
Previous Articles Next Articles
Hao LI, Xinrong LIU( ), Yiqin LIU, Diqing FAN
), Yiqin LIU, Diqing FAN
Received:2024-07-02
Online:2025-08-25
Published:2025-09-18
Contact:
Xinrong LIU
李浩, 刘欣荣(), 刘仪沁, 范狄庆
通讯作者:
刘欣荣
作者简介:李 浩,男,1996年生,硕士研究生。研究方向为特种装备机器人设计及动态性能。
基金资助:CLC Number:
Hao LI, Xinrong LIU, Yiqin LIU, Diqing FAN. Research on Passive Compliance Control Method of High Altitude Wind Turbine Blade Grinding Robots Based on Improved ADRC[J]. China Mechanical Engineering, 2025, 36(08): 1832-1841.
李浩, 刘欣荣, 刘仪沁, 范狄庆. 基于改进自抗扰控制的高空风机叶片打磨机器人被动柔顺控制方法研究[J]. 中国机械工程, 2025, 36(08): 1832-1841.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.08.018
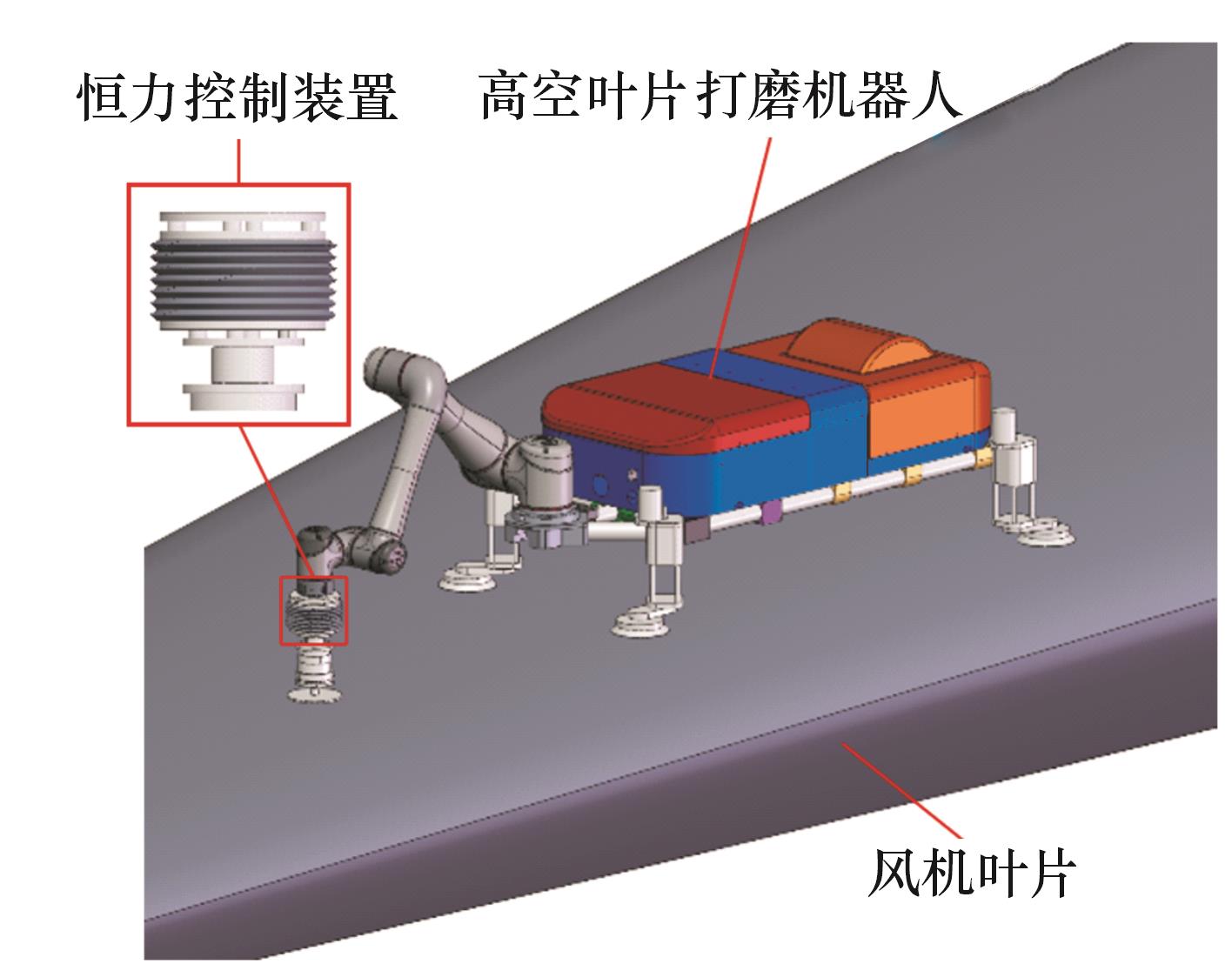
Fig.1 Schematic diagram of robot operation
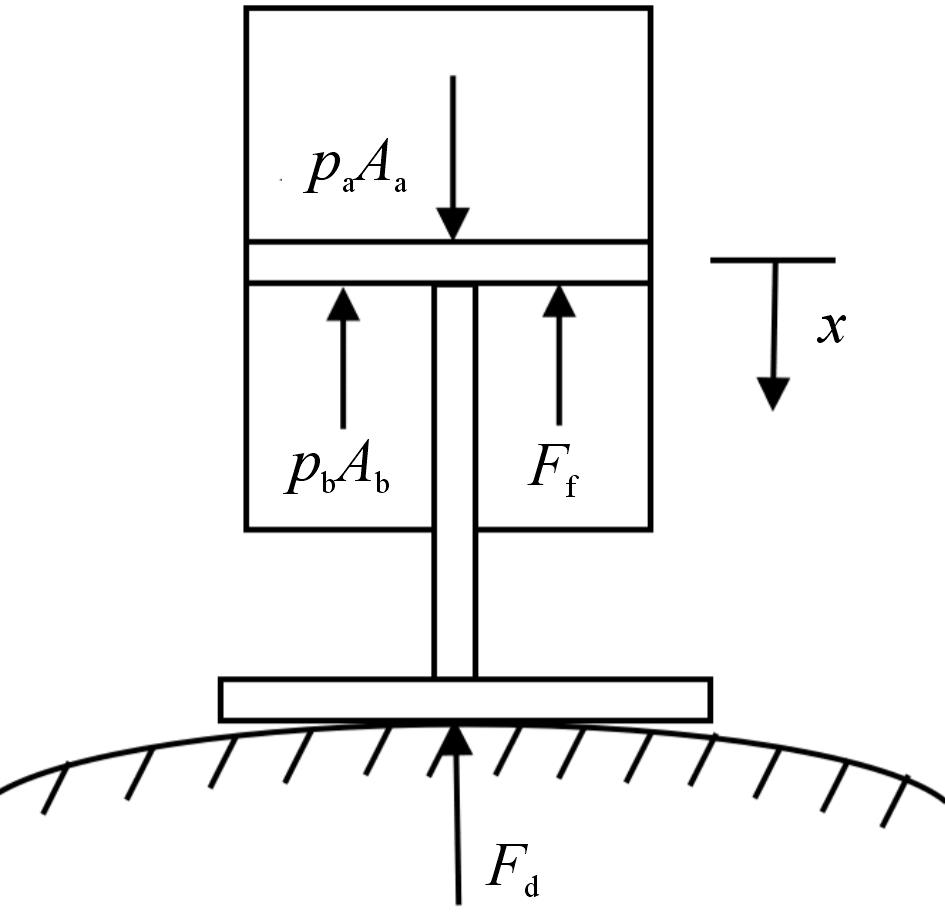
Fig.2 Simplified force diagram of constant force control device
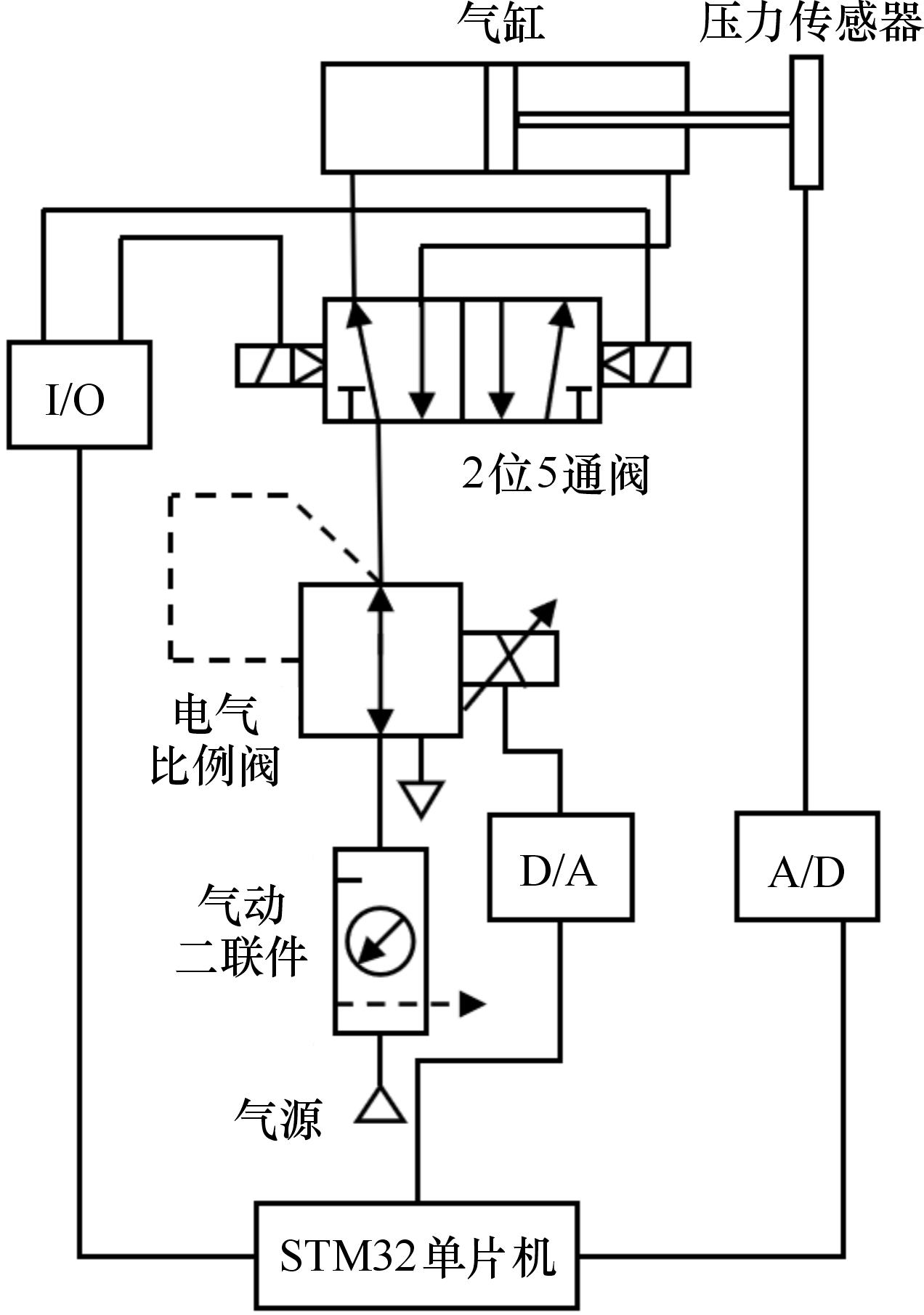
Fig.3 Schematic of gas flow in constant force control device
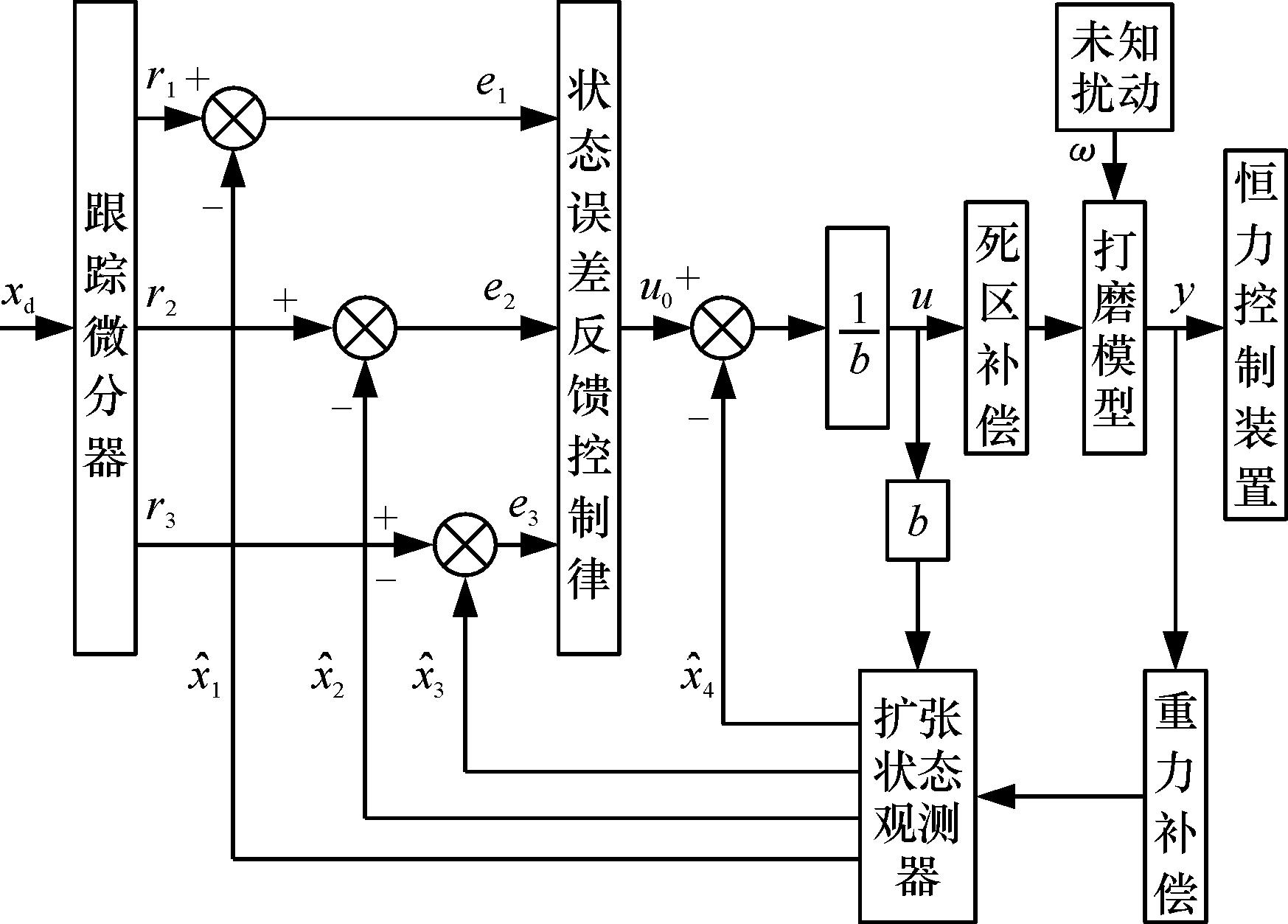
Fig.4 Control system block diagram
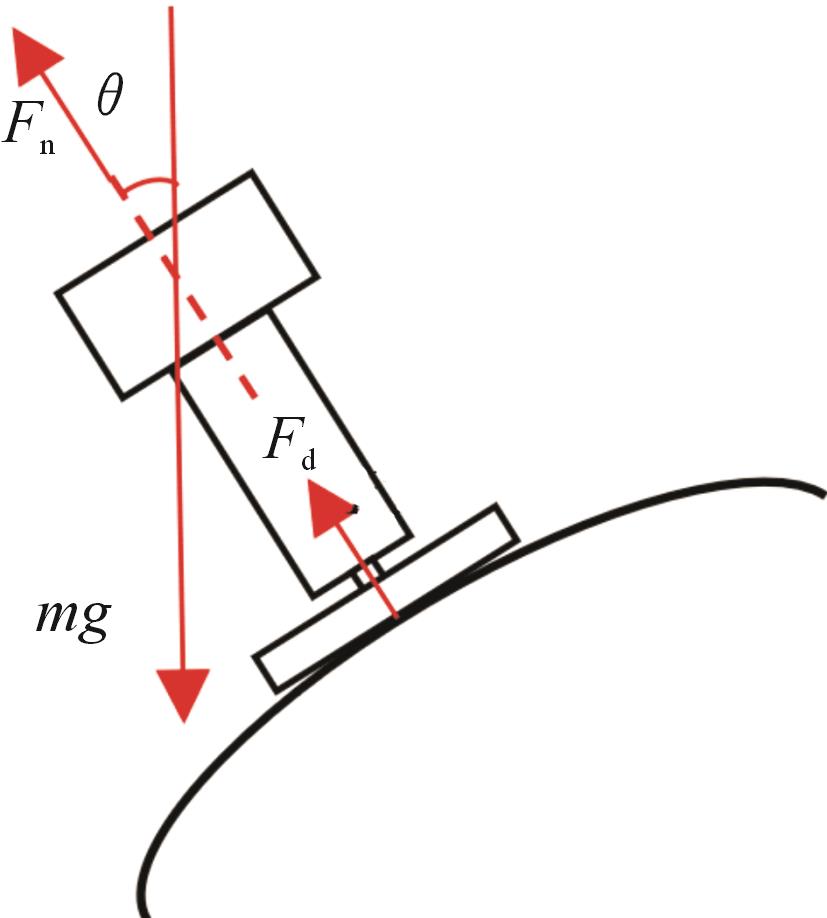
Fig.5 Force analysis of end effector
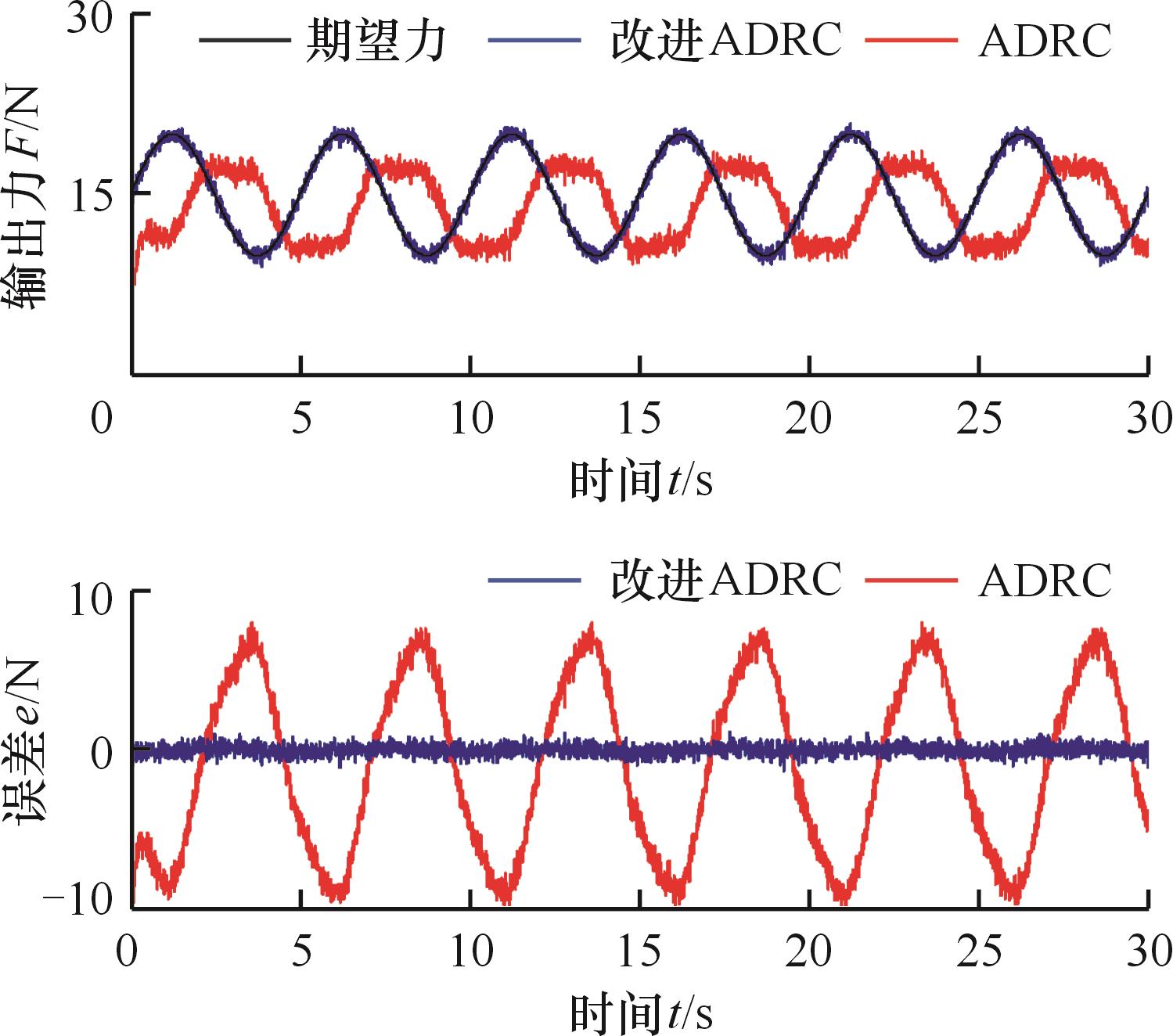
Fig.6 Comparison of improved ADRC algorithms
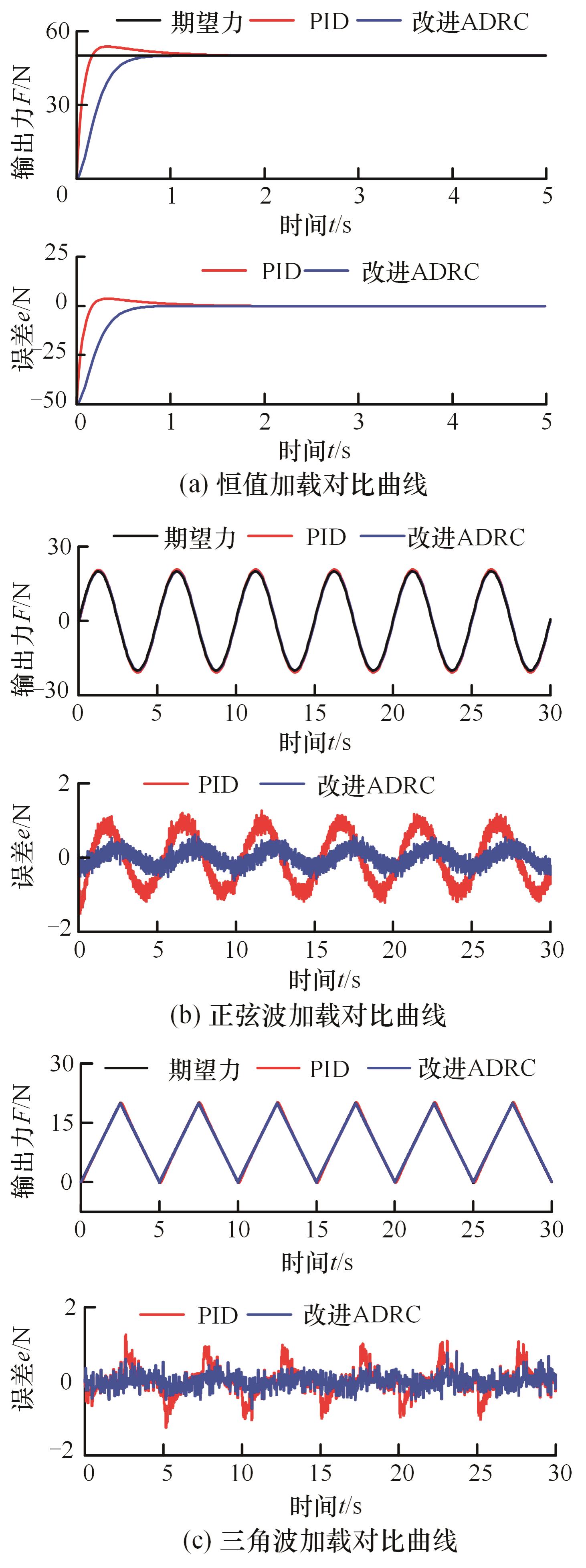
Fig.7 Simulation analysis and comparison
| 性能指标 | PID | 改进ADRC | ||||
|---|---|---|---|---|---|---|
| 恒值 | 正弦 | 三角 | 恒值 | 正弦 | 三角 | |
| 最大误差绝对值 | 3.722 | 1.260 | 1.260 | 0.001 | 0.622 | 0.800 |
| 误差均方值 | 1.141 | 0.448 | 0.138 | 0.045 | 0.039 | |
Tab.1 Simulation comparison performance index
| 性能指标 | PID | 改进ADRC | ||||
|---|---|---|---|---|---|---|
| 恒值 | 正弦 | 三角 | 恒值 | 正弦 | 三角 | |
| 最大误差绝对值 | 3.722 | 1.260 | 1.260 | 0.001 | 0.622 | 0.800 |
| 误差均方值 | 1.141 | 0.448 | 0.138 | 0.045 | 0.039 | |
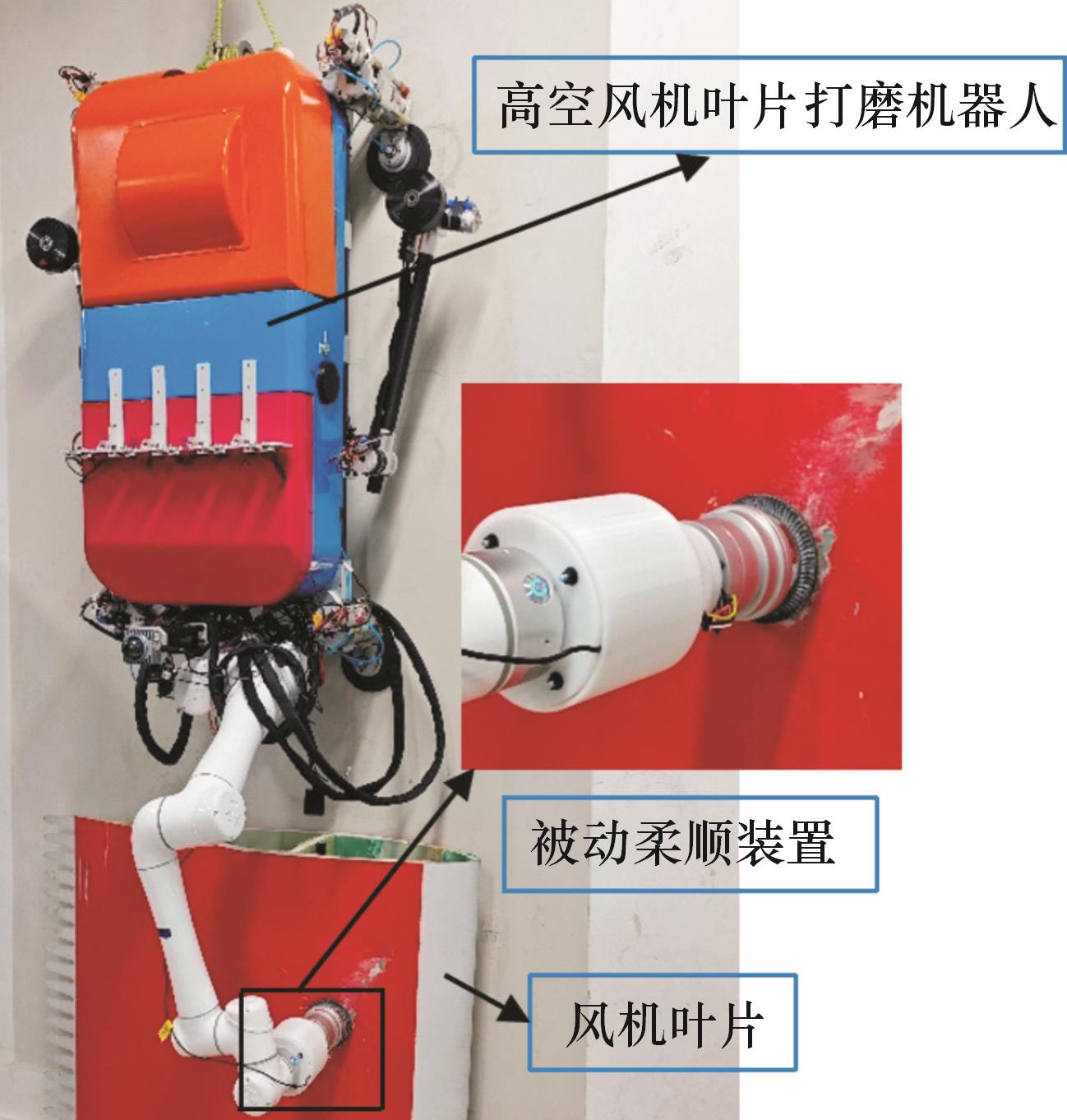
Fig.8 Laboratory bench
| 元器件名称 | 参数 |
|---|---|
| 气源 | 最大输出压力:1.0 MPa |
| 气动二联件 | 减压阀设置压力:0.9 MPa |
| 电气比例阀 | 最高压力:0.9 MPa,精度: |
气缸 倾角传感器 | 缸径:16 mm,行程:20 mm 量程: |
| 压力传感器 | 量程: |
Tab.2 Key components and parameters
| 元器件名称 | 参数 |
|---|---|
| 气源 | 最大输出压力:1.0 MPa |
| 气动二联件 | 减压阀设置压力:0.9 MPa |
| 电气比例阀 | 最高压力:0.9 MPa,精度: |
气缸 倾角传感器 | 缸径:16 mm,行程:20 mm 量程: |
| 压力传感器 | 量程: |
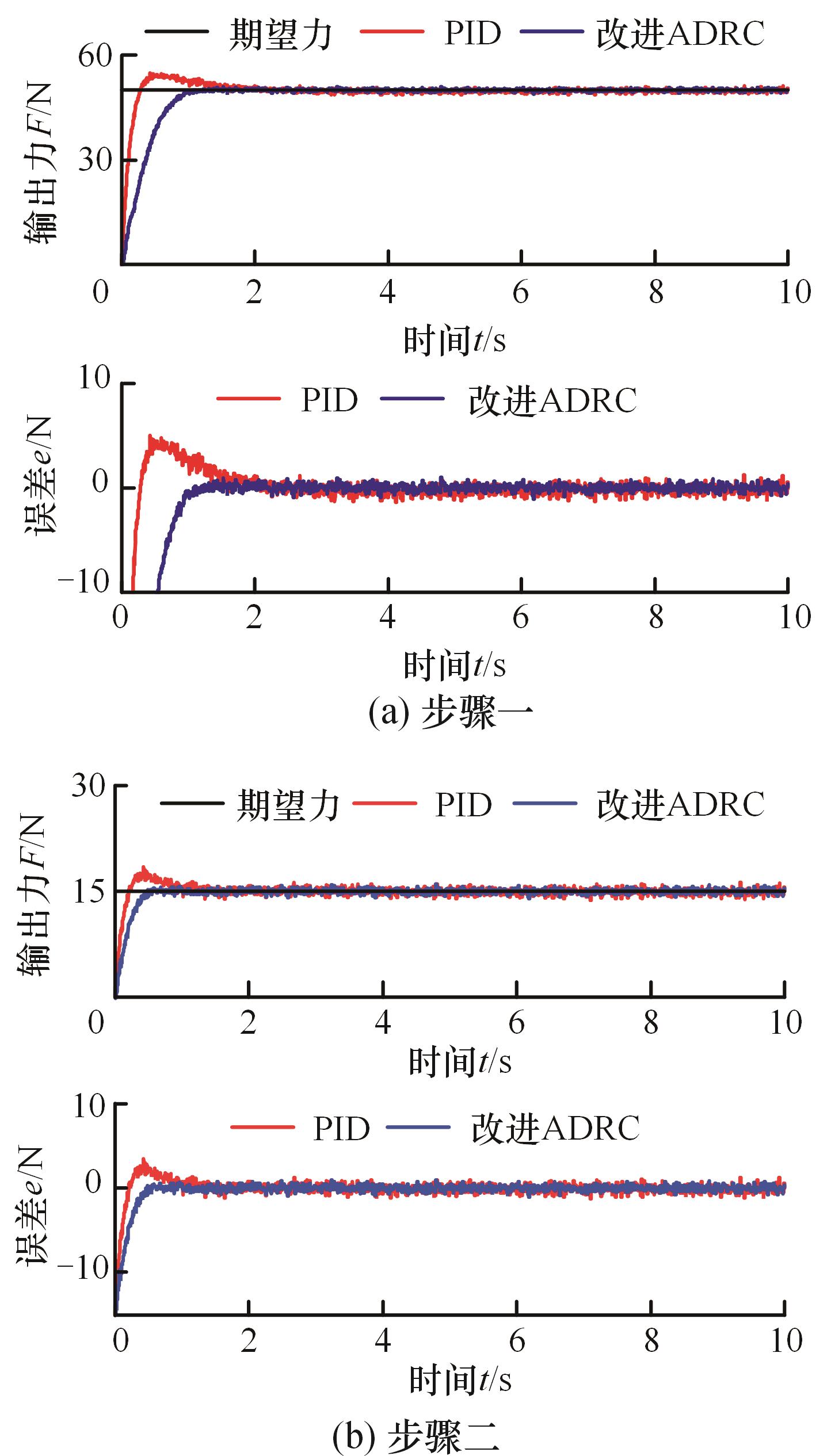
Fig.9 Constant force load experiment
| 步骤 | 控制算法 | |||
|---|---|---|---|---|
| 步骤一 | PID | 1.95 | 4.75 | 0.23 |
| 改进ADRC | 1.08 | 0.12 | 0.10 | |
| 步骤二 | PID | 1.05 | 3.50 | 0.38 |
| 改进ADRC | 0.51 | 0.44 | 0.11 |
Tab.3 Contrast of constant force load experiment
| 步骤 | 控制算法 | |||
|---|---|---|---|---|
| 步骤一 | PID | 1.95 | 4.75 | 0.23 |
| 改进ADRC | 1.08 | 0.12 | 0.10 | |
| 步骤二 | PID | 1.05 | 3.50 | 0.38 |
| 改进ADRC | 0.51 | 0.44 | 0.11 |
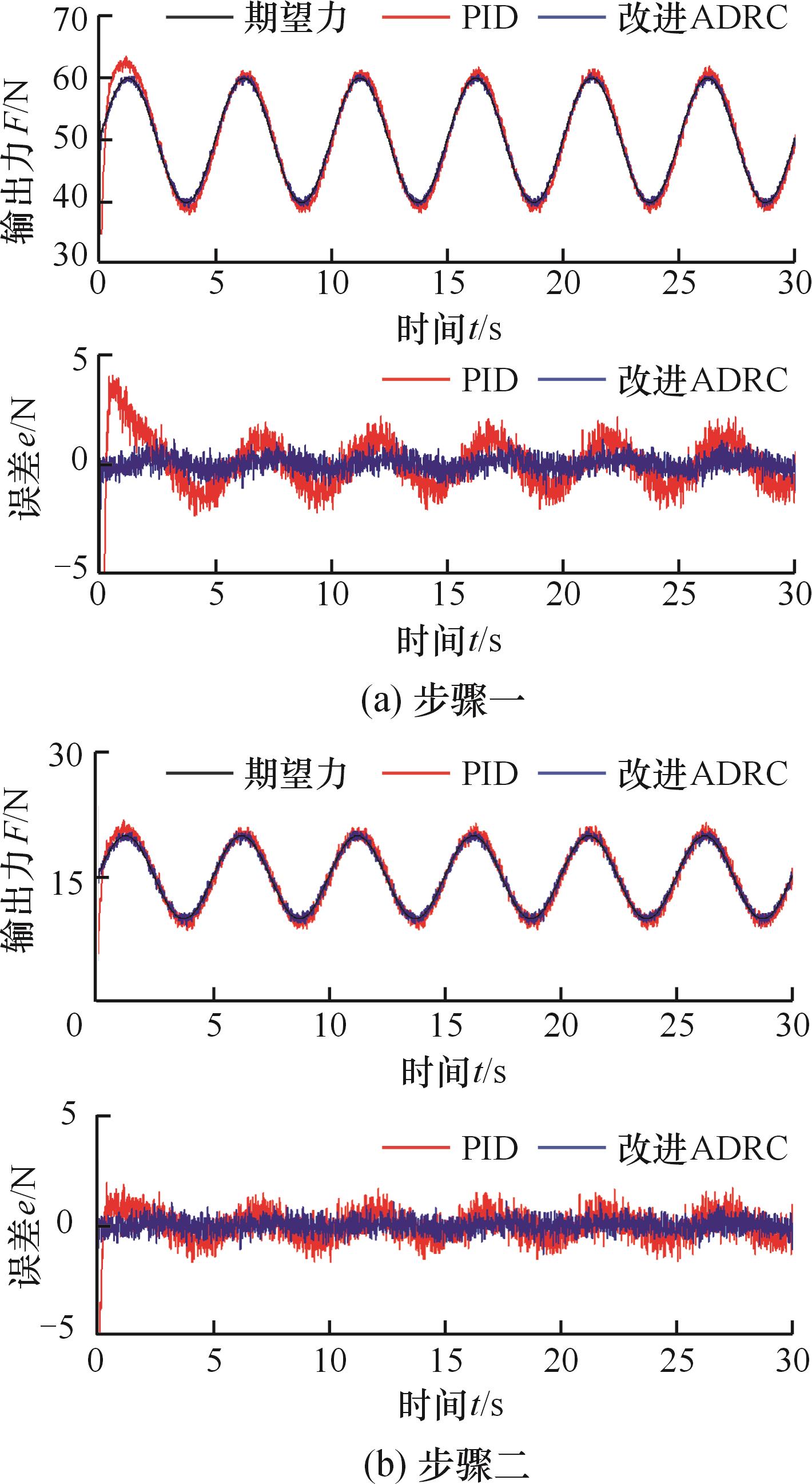
Fig.10 Curve of sinusoidal load experiment
| 步骤 | 控制算法 | μ | |
|---|---|---|---|
| 步骤一 | PID | 4.05 | 8.26 |
| 改进ADRC | 1.24 | 3.55 | |
| 步骤二 | PID | 1.96 | 1.01 |
| 改进ADRC | 1.07 | 0.40 |
Tab.4 Contrast of curve of sinusoidal load experiment
| 步骤 | 控制算法 | μ | |
|---|---|---|---|
| 步骤一 | PID | 4.05 | 8.26 |
| 改进ADRC | 1.24 | 3.55 | |
| 步骤二 | PID | 1.96 | 1.01 |
| 改进ADRC | 1.07 | 0.40 |
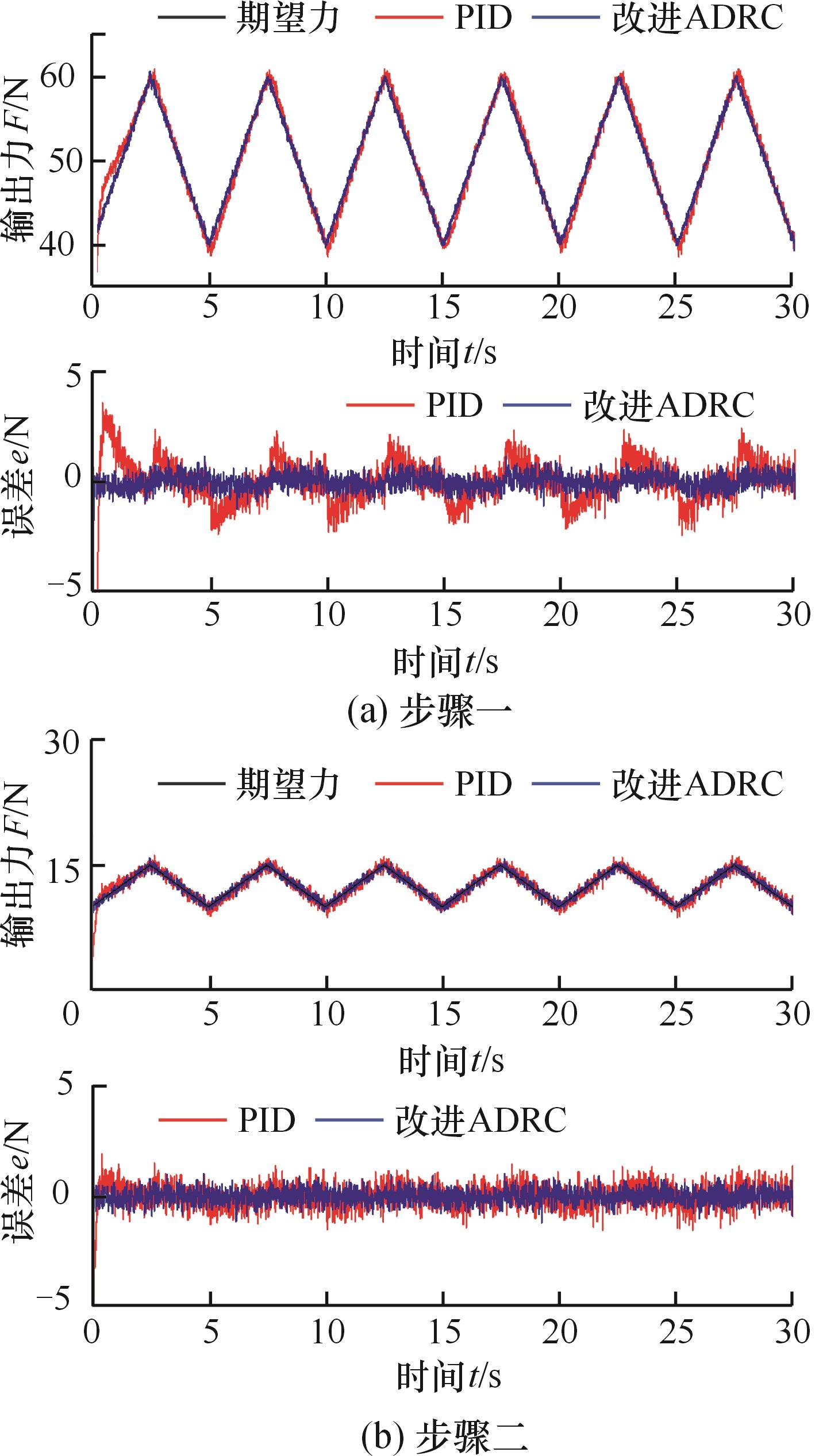
Fig.11 Curve of triangular load experiment
| 步骤 | 控制算法 | ||
|---|---|---|---|
| 步骤一 | PID | 3.56 | 5.34 |
| 改进ADRC | 1.16 | 2.32 | |
| 步骤二 | PID | 1.91 | 0.52 |
| 改进ADRC | 1.03 | 0.23 |
Tab.5 Contrast of curve of triangular load experiment
| 步骤 | 控制算法 | ||
|---|---|---|---|
| 步骤一 | PID | 3.56 | 5.34 |
| 改进ADRC | 1.16 | 2.32 | |
| 步骤二 | PID | 1.91 | 0.52 |
| 改进ADRC | 1.03 | 0.23 |
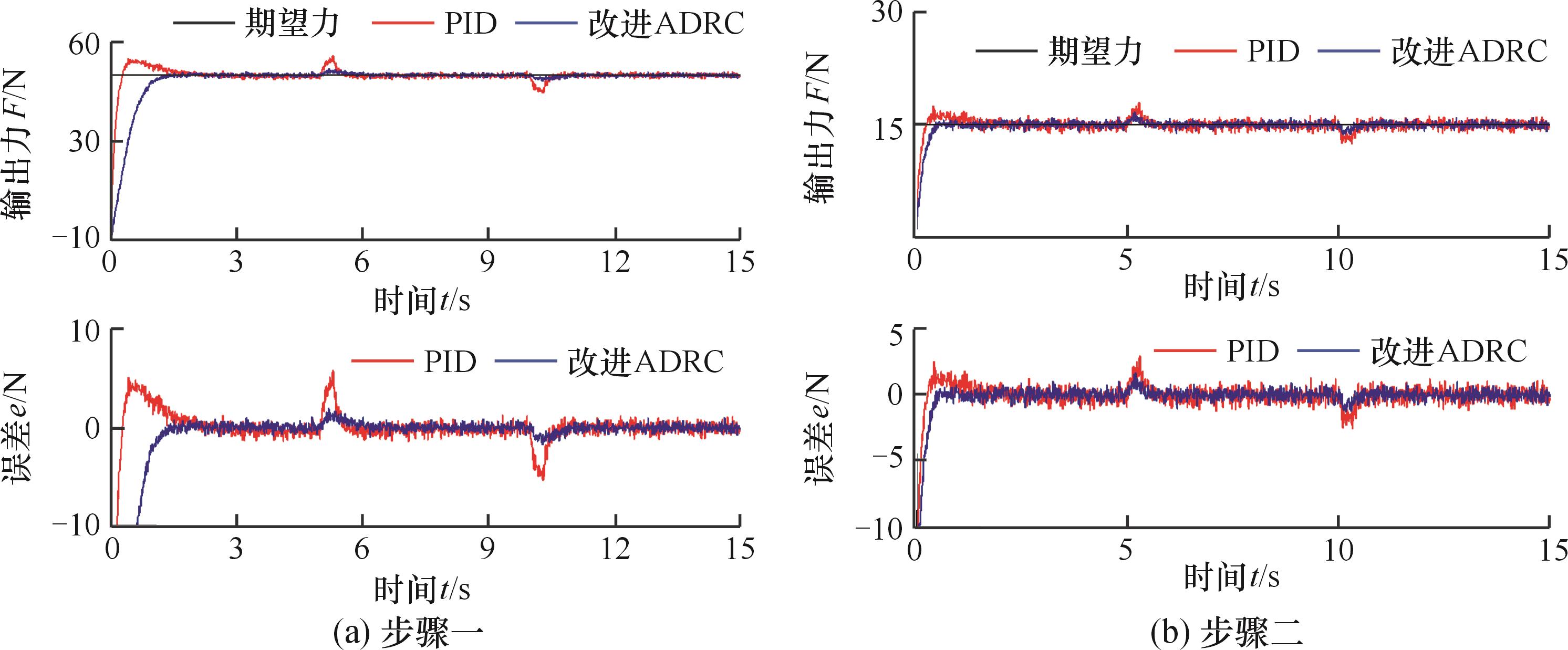
Fig.12 Constant force load experiment(disturb)
| 控制算法 | ||||
|---|---|---|---|---|
| 干扰1 | PID | 0.68 | 5.58 | 9.94 |
| 改进ADRC | 0.54 | 1.89 | 1.05 | |
| 干扰2 | PID | 0.67 | 5.33 | 9.85 |
| 改进ADRC | 0.61 | 1.69 | 0.87 |
Tab.6 Step 1 contrast of constant force load experiment
| 控制算法 | ||||
|---|---|---|---|---|
| 干扰1 | PID | 0.68 | 5.58 | 9.94 |
| 改进ADRC | 0.54 | 1.89 | 1.05 | |
| 干扰2 | PID | 0.67 | 5.33 | 9.85 |
| 改进ADRC | 0.61 | 1.69 | 0.87 |
| 控制算法 | ||||
|---|---|---|---|---|
| 干扰1 | PID | 0.52 | 2.92 | 1.84 |
| 改进ADRC | 0.43 | 1.07 | 0.60 | |
| 干扰2 | PID | 0.61 | 2.45 | 1.72 |
| 改进ADRC | 0.58 | 1.21 | 0.37 |
Tab.7 Step 2 contrast of constant force load experiment
| 控制算法 | ||||
|---|---|---|---|---|
| 干扰1 | PID | 0.52 | 2.92 | 1.84 |
| 改进ADRC | 0.43 | 1.07 | 0.60 | |
| 干扰2 | PID | 0.61 | 2.45 | 1.72 |
| 改进ADRC | 0.58 | 1.21 | 0.37 |
| [1] | 赵书强, 吴博, 李志伟, 等. 风电-储能参与调频的高比例风电电力系统运行经济性分析[J]. 南方电网技术, 2023, 17(4): 69-76. |
| ZHAO Shuqiang, WU Bo, LI Zhiwei, et al. Operational Economic Analysis of High-proportion Wind Power System with Wind Power and Energy Storage Participating in Frequency Regulation[J]. Southern Power System Technology, 2023, 17(4): 69-76. | |
| [2] | 汪泉, 洪星, 杨建忠, 等. 低噪声风力机叶片气动外形优化设计[J]. 中国机械工程, 2018, 29(13): 1574-1579. |
| WANG Quan, HONG Xing, YANG Jianzhong, et al. Aerodynamic Optimal Design of Low Noise Wind Turbine Blades[J]. China Mechanical Engineering, 2018, 29(13): 1574-1579. | |
| [3] | 陶永, 刘海涛, 王田苗, 等. 我国服务机器人技术研究进展与产业化发展趋势[J]. 机械工程学报, 2022, 58(18): 56-74. |
| TAO Yong, LIU Haitao, WANG Tianmiao, et al. Research Progress and Industrialization Development Trend of Chinese Service Robot[J]. Journal of Mechanical Engineering, 2022, 58(18): 56-74. | |
| [4] | 张月, 董雷, 宦荣华, 等. 风电叶片管道内窥履带机器人的设计与运动分析[J]. 中国机械工程, 2021, 32(15): 1884-1889. |
| ZHANG Yue, DONG Lei, HUAN Ronghua, et al. Design and Kinematic Analysis of Crawler-type Pipeline Endoscope Robots for Wind Turbine Blades[J]. China Mechanical Engineering, 2021, 32(15): 1884-1889. | |
| [5] | 葛吉民, 邓朝晖, 李尉, 等. 机器人磨抛力柔顺控制研究进展[J]. 中国机械工程, 2021, 32(18): 2217-2230. |
| GE Jimin, DENG Zhaohui, LI Wei, et al. Research Progresses of Robot Grinding and Polishing Force Compliance Controls[J]. China Mechanical Engineering, 2021, 32(18): 2217-2230. | |
| [6] | 蒋再男, 刘宏, 黄剑斌, 等. 基于阻抗内环的新型力外环控制策略[J]. 航空学报, 2009, 30(8): 1515-1520. |
| JIANG Zainan, LIU Hong, HUANG Jianbin, et al. Novel Explicit Force Control Strategy Based on Impedance Inner Control[J]. Acta Aeronautica Et Astronautica Sinica, 2009, 30(8): 1515-1520. | |
| [7] | 陈峰, 费燕琼, 赵锡芳. 机器人的阻抗控制[J]. 组合机床与自动化加工技术, 2005(12): 46-47. |
| CHEN Feng, FEI Yanqiong, ZHAO Xifang. The Impedance Control Method for Robots[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2005(12): 46-47. | |
| [8] | 郭万金, 于苏扬, 田玉祥, 等. 机器人打磨自适应变阻抗主动柔顺恒力控制[J]. 哈尔滨工业大学学报, 2023, 55(12): 54-65. |
| GUO Wanjin, YU Suyang, TIAN Yuxiang, et al. Active Compliance Constant Force Control with Adaptive Variable Impedance for Robotic Grinding[J]. Journal of Harbin Institute of Technology, 2023, 55(12): 54-65. | |
| [9] | 郭万金, 于苏扬, 赵伍端, 等. 机器人主动柔顺恒力打磨控制方法[J]. 东北大学学报(自然科学版), 2023, 44(1): 89-99. |
| GUO Wanjin, YU Suyang, ZHAO Wuduan, et al. Grinding Control Method of Robotic Active Compliance Constant-force[J]. Journal of Northeastern University (Natural Science), 2023, 44(1): 89-99. | |
| [10] | ZHANG Tie, YU Ye, ZOU Yanbiao. An Adaptive Sliding-mode Iterative Constant-force Control Method for Robotic Belt Grinding Based on a One-dimensional Force Sensor[J]. Sensors, 2019, 19(7): 1635. |
| [11] | DING Yufeng, MIN Xinpu, FU Weiwei, et al. Research and Application on Force Control of Industrial Robot Polishing Concave Curved Surfaces[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2019, 233(6): 1674-1686. |
| [12] | 李小彭, 尚东阳, 陈仁桢, 等. 基于机械臂位姿变换的柔性负载伺服驱动系统控制策略[J]. 机械工程学报, 2020, 56(21): 56-69. |
| LI Xiaopeng, SHANG Dongyang, CHEN Renzhen, et al. Control Strategy of Flexible Load Servo Drive System Based on Manipulator Position and Position Transformation[J]. Journal of Mechanical Engineering, 2020, 56(21): 56-69. | |
| [13] | 王品章, 田威, 曾致贤, 等. 叶片磨抛机器人力/位混合控制的设计与实现[J]. 航空制造技术, 2019, 62(11): 83-89. |
| WANG Pinzhang, TIAN Wei, ZENG Zhixian, et al. Design and Implementation of Force/Position Hybrid Control for Blade Grinding and Polishing Robot[J]. Aeronautical Manufacturing Technology, 2019, 62(11): 83-89. | |
| [14] | 张铁, 吴圣和, 蔡超. 基于浮动平台的机器人恒力控制研磨方法[J]. 上海交通大学学报, 2020, 54(5): 515-523. |
| ZHANG Tie, WU Shenghe, CAI Chao. Constant Force Control Method for Robotic Disk Grinding Based on Floating Platform[J]. Journal of Shanghai Jiao Tong University, 2020, 54(5): 515-523. | |
| [15] | XU Xiaohu, ZHU Dahu, ZHANG Haiyang, et al. Application of Novel Force Control Strategies to Enhance Robotic Abrasive Belt Grinding Quality of Aero-engine Blades[J]. Chinese Journal of Aeronautics, 2019, 32(10): 2368-2382. |
| [16] | WEI Yuzhang, XU Qingsong. Design of a New Passive End-effector Based on Constant-force Mechanism for Robotic Polishing[J]. Robotics and Computer-Integrated Manufacturing, 2022, 74: 102278. |
| [17] | CHEN Fan, ZHAO Huan, LI Dingwei, et al. Contact Force Control and Vibration Suppression in Robotic Polishing with a Smart End Effector[J]. Robotics and Computer-Integrated Manufacturing, 2019, 57: 391-403. |
| [18] | DU Huapeng, SUN Yuwen, FENG Deyang, et al. Automatic Robotic Polishing on Titanium Alloy Parts with Compliant Force/Position Control[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2015, 229(7): 1180-1192. |
| [19] | LI Dingwei, YANG Jixiang, ZHAO Huan, et al. Contact Force Plan and Control of Robotic Grinding towards Ensuring Contour Accuracy of Curved Surfaces[J]. International Journal of Mechanical Sciences, 2022, 227: 107449. |
| [20] | MOHAMMAD A E K, HONG Jie, WANG Danwei. Design of a Force-controlled End-effector with Low-inertia Effect for Robotic Polishing Using Macro-mini Robot Approach[J]. Robotics and Computer-Integrated Manufacturing, 2018, 49: 54-65. |
| [21] | 黄婷, 孙立宁, 王振华, 等. 基于被动柔顺的机器人抛磨力/位混合控制方法[J]. 机器人, 2017, 39(6): 776-785. |
| HUANG Ting, SUN Lining, WANG Zhenhua, et al. Hybrid Force/Position Control Method for Robotic Polishing Based on Passive Compliance Structure[J]. Robot, 2017, 39(6): 776-785. | |
| [22] | 梁青, 王传榜, 潘金文, 等. 线性自抗扰控制参数b0辨识及参数整定规律[J]. 控制与决策, 2015, 30(9): 1691-1695. |
| LIANG Qing, WANG Chuanbang, PAN Jinwen, et al. Parameter Identification of b0 and Parameter Tuning Law in Linear Active Disturbance Rejection Control[J]. Control and Decision, 2015, 30(9): 1691-1695. |
| [1] | Jun WANG, Guibing GAO. A Method for Detecting Surface Defects on Wind Turbine Blades Based on Improved YOLOv5s [J]. China Mechanical Engineering, 2025, 36(09): 2108-2116. |
| [2] | LEI Xingmao1, DING Haigang1, 2, WANG Simin3, YANG Chengcheng1, PANG Zhizhen1. Precise Regulation of Differential Pressures at Port of Load-sensitive Multi-way Valves Based on ADRC Algorithm [J]. China Mechanical Engineering, 2025, 36(05): 954-962,973. |
| [3] | NI Tao1, 2, ZHANG Panhong1, 2 , ZHAO Zeren1, 2. Adaptive Variable Impedance Control for Force Sensor-less Joysticks [J]. China Mechanical Engineering, 2024, 35(06): 1034-1043,1051. |
| [4] | ZHU Yaguang, ZHU Jianwei, LI Ruyue, SONG Zhipeng. Neuromuscular Architecture Based Compliance Control of Bionic Parallel Torsos [J]. China Mechanical Engineering, 2022, 33(13): 1576-1585,1637. |
| [5] | NI Tao, XU Haiyuan, LI Dong, ZHANG Hongyan. Research on Dynamics Feedforward Compliance Control of 6-DOF Platforms [J]. China Mechanical Engineering, 2022, 33(06): 683-689. |
| [6] | WANG Lixin, ZHAO Dingxuan, LIU Fucai, LIU Qian, ZHANG Zhuxin. ADRC for Electro-hydraulic Position Servo Systems Based on Dead-zone Compensation#br# [J]. China Mechanical Engineering, 2021, 32(12): 1432-1442. |
| [7] | KANG Shuang, CHEN Changzheng, ZHAO Siyu, LUO Yuanqing, KONG Xiangxi. Study on Infrared Image Enhancement of Wind Turbine Blades Based on Adaptive Differential Multiscale Morphology(ADMM) [J]. China Mechanical Engineering, 2021, 32(07): 786-792. |
| [8] | WANG Ronglin1;LU Baochun1;HOU Runmin1;GAO Qiang1;ZHANG Wei2;ZHU Yun3;DAI Lian3. FOPID Improved ADRC in AC Servo Systems [J]. China Mechanical Engineering, 2019, 30(16): 1989-1995. |
| [9] | LIAO Wei1;ZHAO Yanming2;LIU Deshun1,3;JIN Yongping1,3. Active Heave Compensation Active Disturbance Rejection Control System of Electric Driven Marine Winchs [J]. China Mechanical Engineering, 2018, 29(24): 2999-3008. |
| [10] | WANG Quan1;HONG Xing1;YANG Jianzhong2;WANG Jun1;SUN Jinfeng1;QIN Zhengzheng1. Aerodynamic Optimal Design of Low Noise Wind Turbine Blades [J]. China Mechanical Engineering, 2018, 29(13): 1574-1579,1587. |
| [11] | ZHAO Linfeng, XU Lei, CHEN Wuwei. Path-tracking of APS Based on ADRC [J]. China Mechanical Engineering, 2017, 28(08): 966-973. |
| [12] | Zhang Leian;Huang Xuemei. Experimental Study on Modal Parameter Identification for Large Wind Turbine Blade [J]. China Mechanical Engineering, 2013, 24(17): 2328-2331. |
| [13] |
WU Chang-Lin, CHEN Xi.
Polishing Method of Aluminum Alloy Wheel Surface with Active-passive Compliant Control
[J]. J4, 2009, 20(23): 2821-2824.
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||