

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (08): 1824-1831.DOI: 10.3969/j.issn.1004-132X.2025.08.017
Previous Articles Next Articles
Hongyan ZHANG1( ), Haoyang ZHAO1, Huanfeng ZHAO2, Nianxuan LI1, Qinzheng SUN1, Lingtao HUANG1()
), Haoyang ZHAO1, Huanfeng ZHAO2, Nianxuan LI1, Qinzheng SUN1, Lingtao HUANG1()
Received:2024-07-29
Online:2025-08-25
Published:2025-09-18
Contact:
Lingtao HUANG
张红彦1(), 赵昊阳1, 赵焕峰2, 李念轩1, 孙钦政1, 黄玲涛1()
通讯作者:
黄玲涛
作者简介:张红彦,女,1973年生,副教授、博士。研究方向为智能移动机器人。E-mail:zhanghy@jlu.edu.cn。
基金资助:CLC Number:
Hongyan ZHANG, Haoyang ZHAO, Huanfeng ZHAO, Nianxuan LI, Qinzheng SUN, Lingtao HUANG. An Explicit Geometric Feature Matching LiDAR SLAM Method[J]. China Mechanical Engineering, 2025, 36(08): 1824-1831.
张红彦, 赵昊阳, 赵焕峰, 李念轩, 孙钦政, 黄玲涛. 一种显式几何特征匹配的激光雷达SLAM方法[J]. 中国机械工程, 2025, 36(08): 1824-1831.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.08.017

Fig.1 Depth image of an ordered point cloud
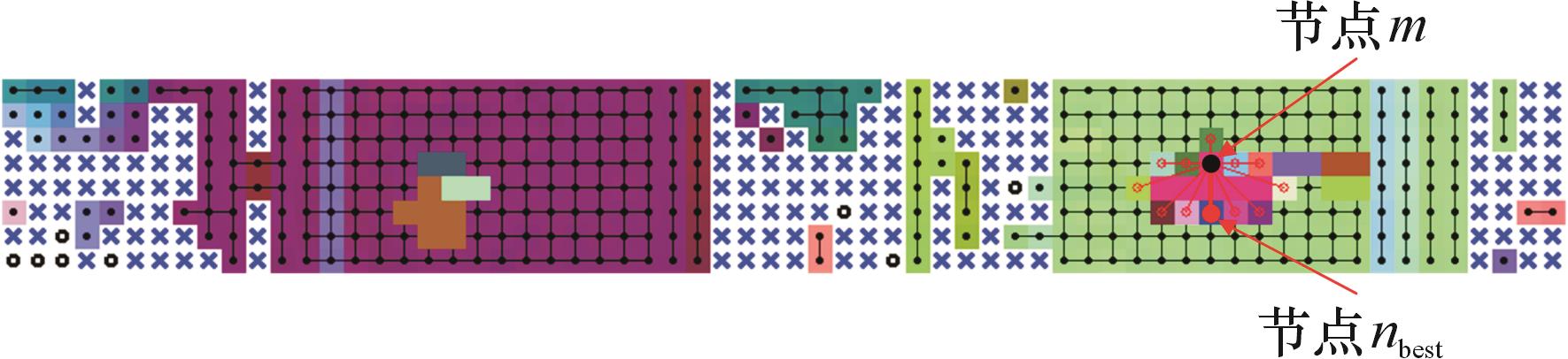
Fig.2 Schematic diagram of merging neighbor nodes

Fig.3 Schematic diagram of the rough segmentation effect of the AHC plane

Fig.4 Optimized plane segmentation effect

Fig.5 A 3D point cloud of the result of plane segmentation

Fig.6 The 2D projection of the results extracted from a straight line
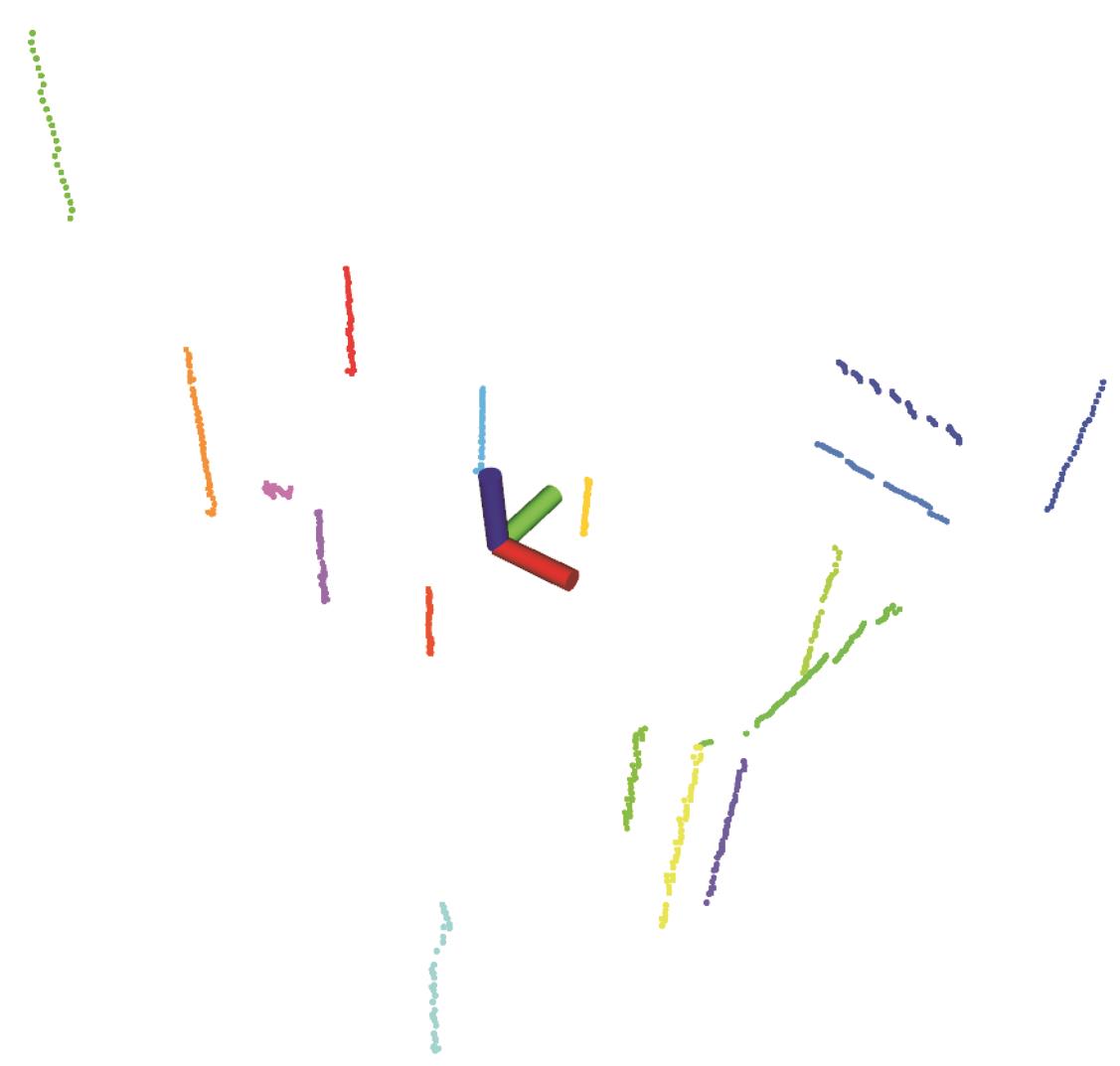
Fig.7 The 3D point cloud extracted from the linear results
| 序列名称 | 场景 | 帧数 | 难度 | 时长/s | 长度/m |
|---|---|---|---|---|---|
| 序列1 | 方形庭院 | 1991 | 简单 | 198 | 246.7 |
| 序列2 | 方形庭院 | 1910 | 中等 | 190 | 260.4 |
| 序列3 | 环形走廊 | 2788 | 简单 | 190 | 428.8 |
| 序列4 | 数学研究所 | 2160 | 简单 | 216 | 263.6 |
| 序列5 | 数学研究所 | 1770 | 中等 | 176 | 176.9 |
| 序列6 | 地下矿洞 | 1412 | 简单 | 141 | 162.5 |
| 序列7 | 地下矿洞 | 1487 | 中等 | 148 | 174.1 |
Tab.1 Newer college dataset sequence information
| 序列名称 | 场景 | 帧数 | 难度 | 时长/s | 长度/m |
|---|---|---|---|---|---|
| 序列1 | 方形庭院 | 1991 | 简单 | 198 | 246.7 |
| 序列2 | 方形庭院 | 1910 | 中等 | 190 | 260.4 |
| 序列3 | 环形走廊 | 2788 | 简单 | 190 | 428.8 |
| 序列4 | 数学研究所 | 2160 | 简单 | 216 | 263.6 |
| 序列5 | 数学研究所 | 1770 | 中等 | 176 | 176.9 |
| 序列6 | 地下矿洞 | 1412 | 简单 | 141 | 162.5 |
| 序列7 | 地下矿洞 | 1487 | 中等 | 148 | 174.1 |
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 误差均值 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 0.0856 | 0.4034 | 0.2639 | 0.0863 | 0.8257 | 0.1451 | 0.1935 | 0.2862 |
| LeGO-LOAM | 0.0929 | 0.5453 | 0.1865 | 0.1303 | 0.4315 | 0.1081 | 0.1311 | 0.2322 |
| LL-LO | 0.1139 | 0.3569 | 0.2942 | 0.1522 | 0.3162 | 0.1255 | 0.1629 | 0.2174 |
| LP-LO | 0.1068 | 0.3847 | 0.1742 | 0.1182 | 0.2835 | 0.1138 | 0.1497 | 0.1901 |
| LPL-LO | 0.0888 | 0.2912 | 0.1224 | 0.0804 | 0.2617 | 0.0919 | 0.1244 | 0.1515 |
| LPL-SLAM | 0.0865 | 0.2891 | 0.1027 | 0.0685 | 0.2388 | 0.0683 | 0.0935 | 0.1353 |
Tab.2 Absolute trajectory translation error
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 误差均值 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 0.0856 | 0.4034 | 0.2639 | 0.0863 | 0.8257 | 0.1451 | 0.1935 | 0.2862 |
| LeGO-LOAM | 0.0929 | 0.5453 | 0.1865 | 0.1303 | 0.4315 | 0.1081 | 0.1311 | 0.2322 |
| LL-LO | 0.1139 | 0.3569 | 0.2942 | 0.1522 | 0.3162 | 0.1255 | 0.1629 | 0.2174 |
| LP-LO | 0.1068 | 0.3847 | 0.1742 | 0.1182 | 0.2835 | 0.1138 | 0.1497 | 0.1901 |
| LPL-LO | 0.0888 | 0.2912 | 0.1224 | 0.0804 | 0.2617 | 0.0919 | 0.1244 | 0.1515 |
| LPL-SLAM | 0.0865 | 0.2891 | 0.1027 | 0.0685 | 0.2388 | 0.0683 | 0.0935 | 0.1353 |
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 平均误差 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 1.3262 | 2.1683 | 1.8402 | 0.6375 | 3.9587 | 2.1558 | 2.6240 | 2.1015 |
| LeGO-LOAM | 1.3705 | 2.3082 | 1.9917 | 0.8802 | 3.3395 | 2.3710 | 2.3344 | 2.0851 |
| LL-LO | 2.1462 | 2.3851 | 2.3518 | 0.9573 | 3.6842 | 2.3568 | 2.5713 | 2.3504 |
| LP-LO | 1.7438 | 2.4692 | 2.1566 | 0.8359 | 3.1183 | 2.1366 | 2.1724 | 2.0904 |
| LPL-LO | 1.3405 | 2.2011 | 1.6433 | 0.5451 | 2.9053 | 1.9088 | 2.1230 | 1.8096 |
| LPL-SLAM | 1.2309 | 2.1816 | 1.5943 | 0.5553 | 2.8719 | 1.9140 | 2.0116 | 1.7656 |
Tab.3 Absolute trajectory angular error
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 平均误差 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 1.3262 | 2.1683 | 1.8402 | 0.6375 | 3.9587 | 2.1558 | 2.6240 | 2.1015 |
| LeGO-LOAM | 1.3705 | 2.3082 | 1.9917 | 0.8802 | 3.3395 | 2.3710 | 2.3344 | 2.0851 |
| LL-LO | 2.1462 | 2.3851 | 2.3518 | 0.9573 | 3.6842 | 2.3568 | 2.5713 | 2.3504 |
| LP-LO | 1.7438 | 2.4692 | 2.1566 | 0.8359 | 3.1183 | 2.1366 | 2.1724 | 2.0904 |
| LPL-LO | 1.3405 | 2.2011 | 1.6433 | 0.5451 | 2.9053 | 1.9088 | 2.1230 | 1.8096 |
| LPL-SLAM | 1.2309 | 2.1816 | 1.5943 | 0.5553 | 2.8719 | 1.9140 | 2.0116 | 1.7656 |
| 序列名称 | 场景 | 帧数 | 时长/s | 长度/m |
|---|---|---|---|---|
| 序列1 | 机械馆 | 3422 | 343 | 386.4 |
| 序列2 | 机械馆 | 2904 | 291 | 321.7 |
| 序列3 | 体育馆 | 4284 | 429 | 606.4 |
Tab.4 Scene diagram of a custom dataset
| 序列名称 | 场景 | 帧数 | 时长/s | 长度/m |
|---|---|---|---|---|
| 序列1 | 机械馆 | 3422 | 343 | 386.4 |
| 序列2 | 机械馆 | 2904 | 291 | 321.7 |
| 序列3 | 体育馆 | 4284 | 429 | 606.4 |
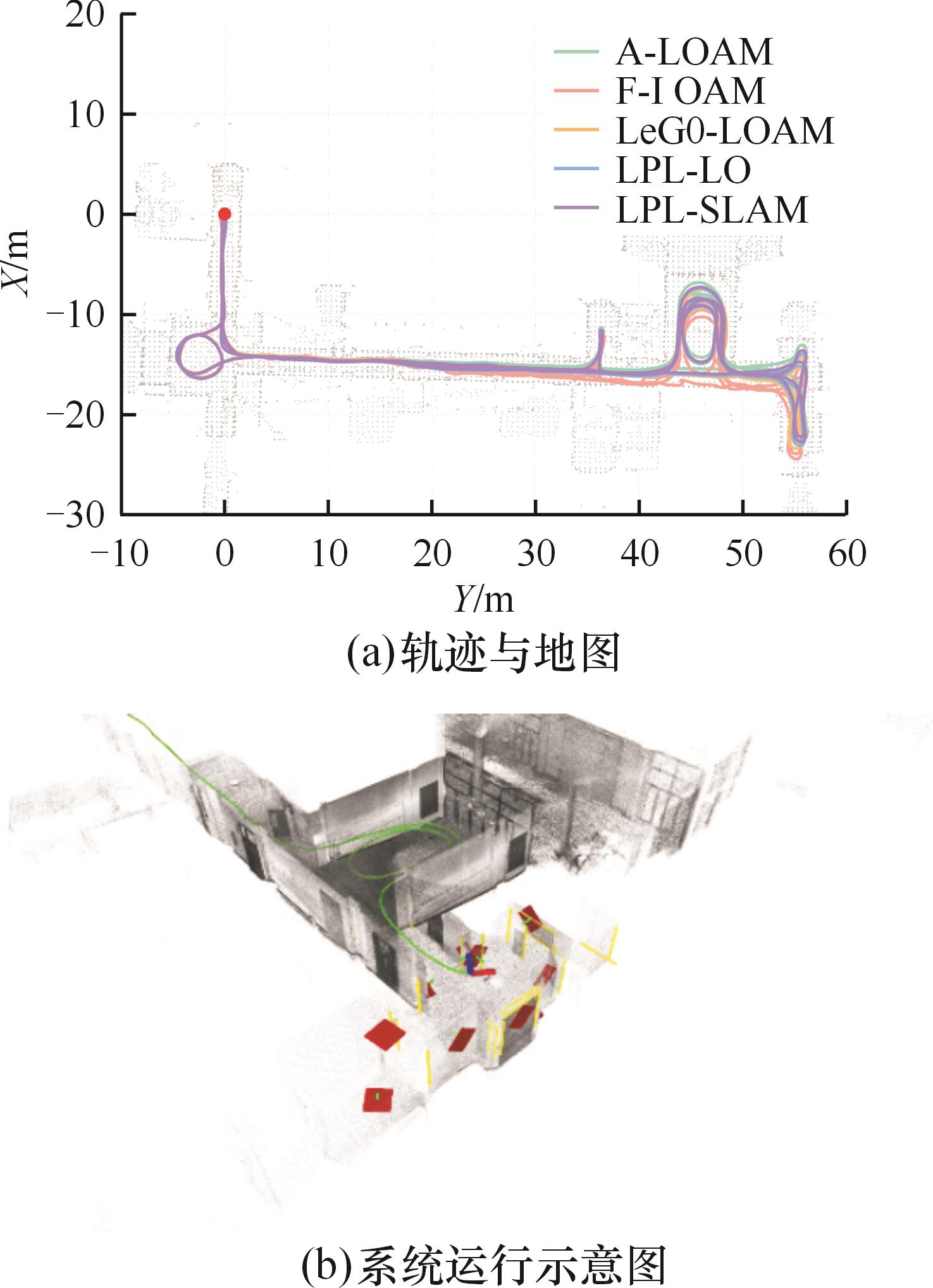
Fig.8 Experimental results of self-made data set sequence 1
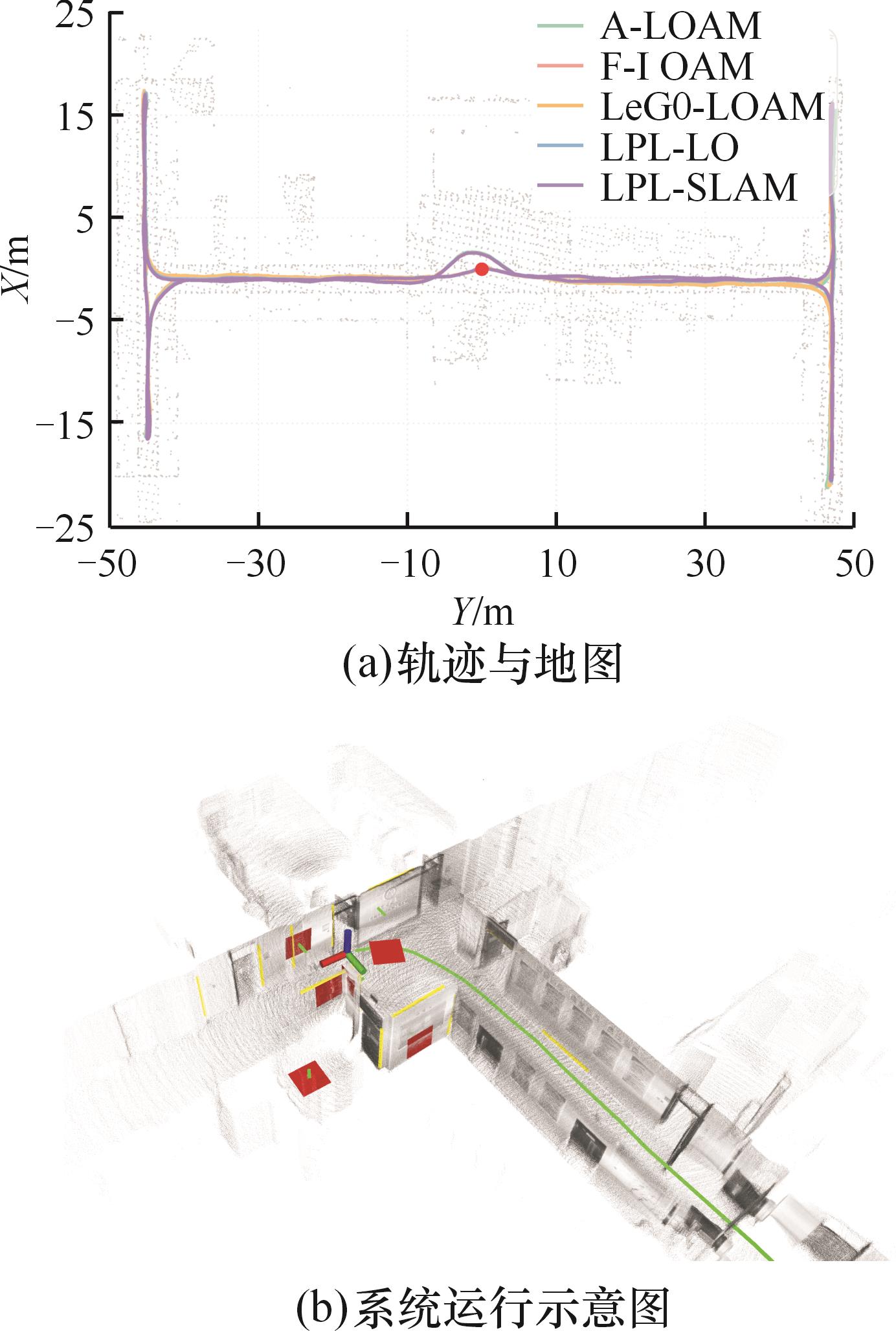
Fig.9 Experimental results of self-made data set sequence 2
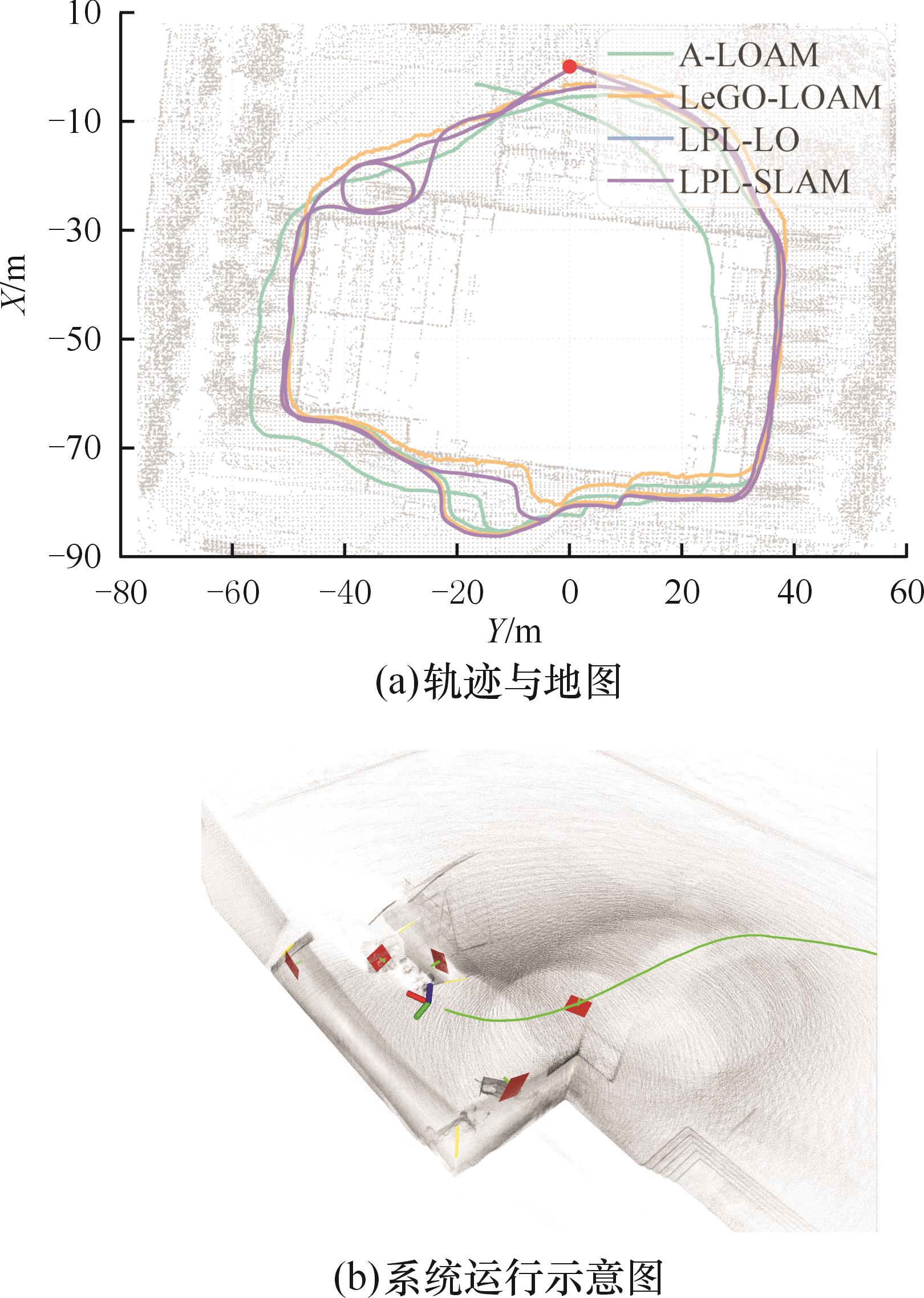
Fig.10 Experimental results of self-made data set sequence 3
| 序列名称 | A-LOAM | LeGO-LOAM | LPL-LO | LPL-SLAM |
|---|---|---|---|---|
| 序列1 | 0.131 m/2.146° | 0.245 m/2.436° | 0.104 m/1.708° | 0.075 m/1.485° |
| 序列2 | 0.096 m/2.348° | 0.075 m/2.341° | 0.091 m/1.522° | 0.062 m/1.379° |
| 序列3 | 17.43 m/5.269° | 0.535 m/2.571° | 0.205 m/2.675° | 0.121 m/1.841° |
Tab.5 Relative translation/rotation error
| 序列名称 | A-LOAM | LeGO-LOAM | LPL-LO | LPL-SLAM |
|---|---|---|---|---|
| 序列1 | 0.131 m/2.146° | 0.245 m/2.436° | 0.104 m/1.708° | 0.075 m/1.485° |
| 序列2 | 0.096 m/2.348° | 0.075 m/2.341° | 0.091 m/1.522° | 0.062 m/1.379° |
| 序列3 | 17.43 m/5.269° | 0.535 m/2.571° | 0.205 m/2.675° | 0.121 m/1.841° |
| 序列名称 | 特征提取 | 位姿优化 | 局部优化 | 全局优化 |
|---|---|---|---|---|
| LPL-SLAM/Newer College Dataset 序列 1 | 24.07 | 20.67 | 19.44 | 88.53 |
| LPL-SLAM/校园数据集 序列 1 | 17.51 | 14.97 | 26.02 | 109.6 |
Tab.6 Runtime of each module
| 序列名称 | 特征提取 | 位姿优化 | 局部优化 | 全局优化 |
|---|---|---|---|---|
| LPL-SLAM/Newer College Dataset 序列 1 | 24.07 | 20.67 | 19.44 | 88.53 |
| LPL-SLAM/校园数据集 序列 1 | 17.51 | 14.97 | 26.02 | 109.6 |
| 序列名称 | 局部优化 |
|---|---|
| LPL-SLAM/Newer CollegeDataset 序列1 | 19.44 |
| LPL-SLAM/校园数据集 序列1 | 26.02 |
| A-LOAM/Newer College Dataset 序列1 | 10.27 |
| A-LOAM/校园数据集 序列1 | 11.98 |
Tab.7 Local optimization runtime
| 序列名称 | 局部优化 |
|---|---|
| LPL-SLAM/Newer CollegeDataset 序列1 | 19.44 |
| LPL-SLAM/校园数据集 序列1 | 26.02 |
| A-LOAM/Newer College Dataset 序列1 | 10.27 |
| A-LOAM/校园数据集 序列1 | 11.98 |
| [1] | GALVEZ-LÓPEZ D, TARDOS J D. Bags of Binary Words for Fast Place Recognition in Image Sequences[J]. IEEE Transactions on Robotics, 2012, 28(5):1188-1197. |
| [2] | RIBEIRO M I. Kalman and Extended Kalman Filters: Concept, Derivation and Properties[J]. Institute for Systems and Robotics, 2004, 43(46):3736-3741. |
| [3] | MURPHY K, RUSSELL S. Rao-blackwellised Particle Filtering for Dynamic Bayesian Networks[M]∥Sequential Monte Carlo Methods in Practice. New York: Springer New York, 2001:499-515. |
| [4] | THRUN S. Probabilistic Robotics[J]. Communications of the ACM, 2002, 45(3):52-57. |
| [5] | OLSON E B. Real-time Correlative Scan Matching[C]∥2009 IEEE International Conference on Robotics and Automation. Kobe, 2009:4387-4393. |
| [6] | ZHANG Ji, SINGH S. LOAM:Lidar Odometry and Mapping in Real-time[C]∥Robotics:Science and Systems. Berkeley, 2014:1-9. |
| [7] | SHAN Tixiao, ENGLOT B. LeGO-LOAM:Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, 2018:4758-4765. |
| [8] | WANG Han, WANG Chen, CHEN Chunlin, et al. F-LOAM:Fast LiDAR Odometry and Mapping[C]∥2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague, 2021:4390-4396. |
| [9] | PAN Yue, XIAO Pengchuan, HE Yujie, et al. MULLS: Versatile LiDAR SLAM via Multi-metric Linear Least Square[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, 2021:11633-11640. |
| [10] | YANG Heng, SHI Jingnan, CARLONE L. TEASER:Fast and Certifiable Point Cloud Registration[J]. IEEE Transactions on Robotics, 2021, 37(2):314-333. |
| [11] | SÜNDERHAUF N, PROTZEL P. Towards a Robust Back-end for Pose Graph SLAM[C]∥2012 IEEE International Conference on Robotics and Automation. St Paul, 2012:1254-1261. |
| [12] | WANG Han, WANG Chen, XIE Lihua. Intensity-SLAM:Intensity Assisted Localization and Mapping for Large Scale Environment[J]. IEEE Robotics and Automation Letters, 2021, 6(2):1715-1721. |
| [13] | WOLD S, ESBENSEN K, GELADI P. Principal Component Analysis[J]. Chemometrics and Intelligent Laboratory Systems, 1987, 2(1/2/3):37-52. |
| [14] | BEHLEY J, STACHNISS C. Efficient Surfel-based SLAM Using 3D Laser Range Data in Urban Environments[C]∥Robotics: Science and Systems. Pittsburgh, 2018:46954808. |
| [15] | FENG Chen, TAGUCHI Y, KAMAT V R. Fast Plane Extraction in Organized Point Clouds Using Agglomerative Hierarchical Clustering[C]∥2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, 2014:6218-6225. |
| [16] | GAO Haiming, ZHANG Xuebo, FANG Yongchun, et al. A Line Segment Extraction Algorithm Using Laser Data Based on Seeded Region Growing[J]. International Journal of Advanced Robotic Systems, 2018, 15:1729881418755245. |
| [17] | ZUO Xingxing, XIE Xiaojia, LIU Yong, et al. Robust Visual SLAM with Point and Line Features[C]∥2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, 2017:1775-1782. |
| [18] | GENEVA P, ECKENHOFF K, YANG Yulin, et al. Lips:LiDAR-inertial 3D Plane Slam[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, 2018:123-130. |
| [19] | ZHANG L, CAMURRI M, WISTH D, et al. Multi-camera LiDAR Inertial Extension to the Newer College Dataset[M]∥arXiv Preprint, 2022. |
| [20] | LIU Zheng, LI Haotian, YUAN Chongjian, et al. Voxel-SLAM:a Complete, Accurate, and Versatile LiDAR-Inertial SLAM System [EB/OL]. arXiv:2410.08935, 2024-10-11[2024-10-20]. . |
| [21] | XU Ziheng, LI Qingfeng, CHEN Chen, et al. GLC-SLAM:Gaussian Splatting SLAM with Efficient Loop Closure [EB/OL]. arXiv:2409.10982, 2024-09-17[2024-10-20]. . |
| [1] | Congbo LI, Hewang ZHAI, Wei WU, Ke DONG, Xiangfei ZHANG. Energy Consumption Anomaly Detection of Automobile Painting Drying System Based on TCN-GAT and Hybrid Neural Network [J]. China Mechanical Engineering, 2025, 36(08): 1864-1874. |
| [2] | TENG Jiapeng, WU Guoqi. Feature Extraction Method for Seawater Pump Excitation Sources Based on SOA-VMD-ICA [J]. China Mechanical Engineering, 2024, 35(08): 1373-1380. |
| [3] | GAO Xinqin, YANG Xueqi, ZHENG Haiyang. Residual Life Prediction Method of Belt Conveyors Based on MDT Learning [J]. China Mechanical Engineering, 2024, 35(08): 1435-1448. |
| [4] | GE Jimin1, DENG Zhaohui2, WANG Shuixian1, ZHUO Rongjin1, LIU Wei1, Chen Xi3. Automated Grinding System and Method for Robotic Weld Seams Based on Point Cloud [J]. China Mechanical Engineering, 2024, 35(07): 1253-1262,1268. |
| [5] | MEI Jie, QIN Jiarui, CHEN Dingfang, CHEN Kun, . SLAM-based Underwater Image Enhanced Visual 3D Reconstruction Method [J]. China Mechanical Engineering, 2024, 35(02): 268-279. |
| [6] | JI Yongjian, YAO Licheng, . Research on Self-adaptive Chatter Recognition Method for Robotic Milling [J]. China Mechanical Engineering, 2023, 34(18): 2165-2176. |
| [7] | ZHENG Jinde, CHEN Yan, TONG Jinyu, PAN Haiyang. RGCMvMRDE and Its Applications in Rolling Bearing Fault Diagnosis [J]. China Mechanical Engineering, 2023, 34(11): 1315-1325. |
| [8] | LIU Xiaofeng, ZHANG Tianyu, ZHANG Chunbing, BO Lin. Location Imaging of Composite Plate Damage Based on Cross Recurrence Rate [J]. China Mechanical Engineering, 2023, 34(08): 940-947. |
| [9] | ZHAO Jing, YANG Shaopu, LI Qiang, LIU Yongqiang, . A New Transfer Learning Method with Residual Attention and Its Applications on Rolling Bearing Fault Diagnosis [J]. China Mechanical Engineering, 2023, 34(03): 332-343. |
| [10] | ZHANG Kang, TIAN Zeyu, CHEN Xiangmin, LIAO Lida, WU Jiateng. Application of MMD in Gear Fault Feature Extraction under Variable Rotating Speed Working Conditions [J]. China Mechanical Engineering, 2022, 33(20): 2483-2491. |
| [11] | CHEN Dongmei, ZHAO Siheng, WEI Chengyin, CHEN Yajie. Research and Applications of Condition Monitoring and Predictive Maintenance of Marine Diesel Engines [J]. China Mechanical Engineering, 2022, 33(10): 1162-1168. |
| [12] | JIANG Jiawei, HU Yihuai, FANG Yunhu, ZHANG Chen, RUI Xiaosong, WANG Meng. Fault Diagnosis Method of Marine Fans Based on MTAD and Fuzzy Entropy [J]. China Mechanical Engineering, 2022, 33(10): 1178-1188. |
| [13] | ZHANG Long, CAI Binghuan, XIONG Guoliang, WANG Chaobing, HU Junfeng. Multi-stage Noise Reduction Method with ESMK for Adaptive Feature Extraction of Rolling Bearings [J]. China Mechanical Engineering, 2021, 32(24): 2950-2959. |
| [14] | ZHAO Zhihong, LI Lehao, YANG Shaopu, LI Qing. A Frequency Domain Feature Extraction Auto-encoder and Its Applications on Fault Diagnosis [J]. China Mechanical Engineering, 2021, 32(20): 2468-2474. |
| [15] | XU Peng, FANG Zhou, WANG Ping, GENG Ming, XU Yong. Quantitative Evaluation Method of Defects Based on Transient Characteristics of PMFL [J]. China Mechanical Engineering, 2021, 32(07): 860-866,881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||