

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (12): 2960-2967.DOI: 10.3969/j.issn.1004-132X.2025.12.019
Previous Articles Next Articles
YIN Feng1( ), HUANG Xin1, ZHOU Jiayi2
), HUANG Xin1, ZHOU Jiayi2
Received:2025-01-17
Online:2025-12-25
Published:2025-12-31
Contact:
YIN Feng
印峰1(), 黄欣1, 周佳义2
通讯作者:
印峰
作者简介:印峰*(通信作者),男,1983年生,博士、副教授。研究方向为机器人技术。E-mail:yinfeng83@126.com。
基金资助:CLC Number:
YIN Feng, HUANG Xin, ZHOU Jiayi. High-precision Computation of Inverse Kinematics for Redundant Robots Based on Flow Model[J]. China Mechanical Engineering, 2025, 36(12): 2960-2967.
印峰, 黄欣, 周佳义. 基于流模型的冗余机器人逆运动学解高精度计算[J]. 中国机械工程, 2025, 36(12): 2960-2967.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.12.019
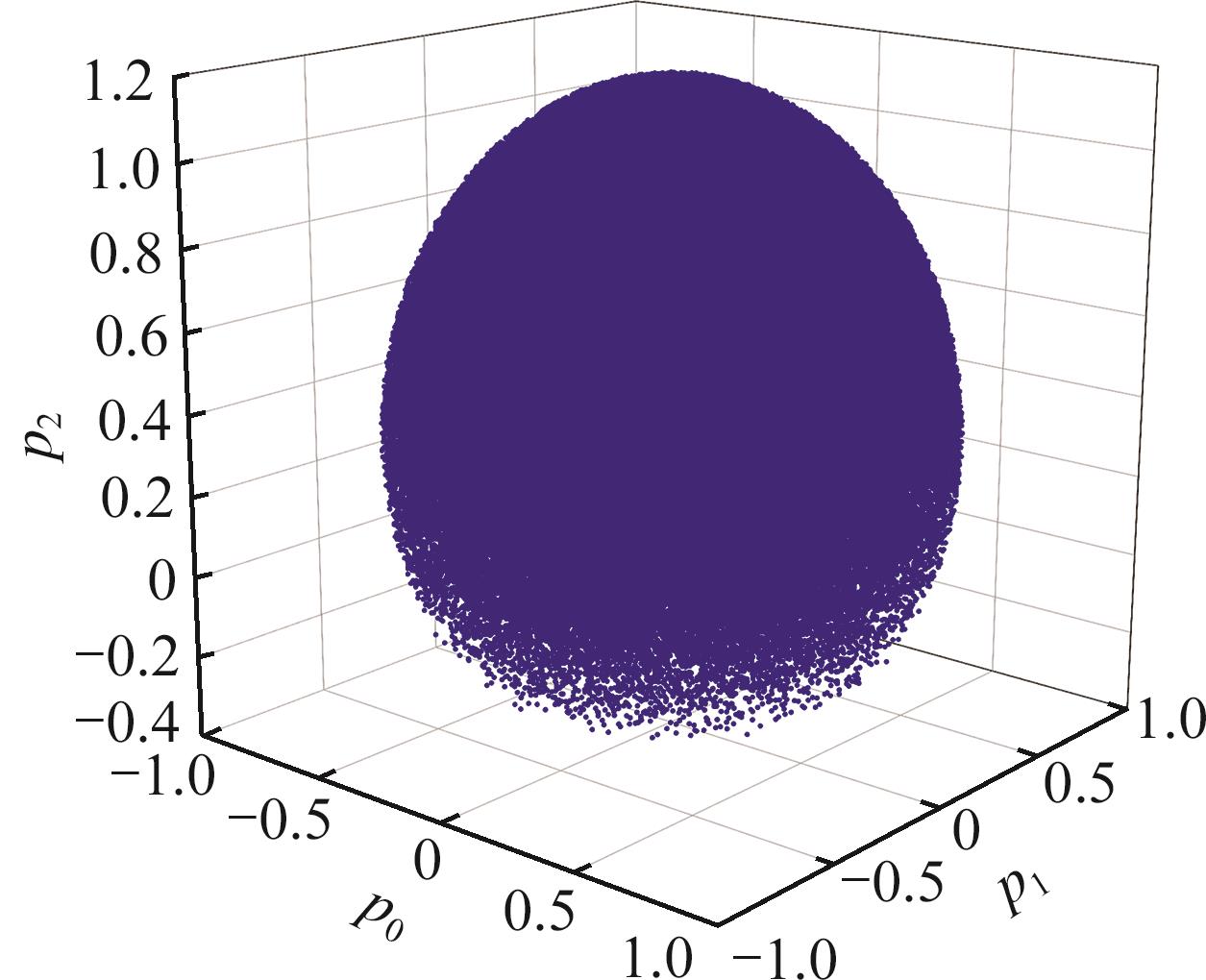
Fig.1 The first three dimensions of Panda robot training conditional dataset
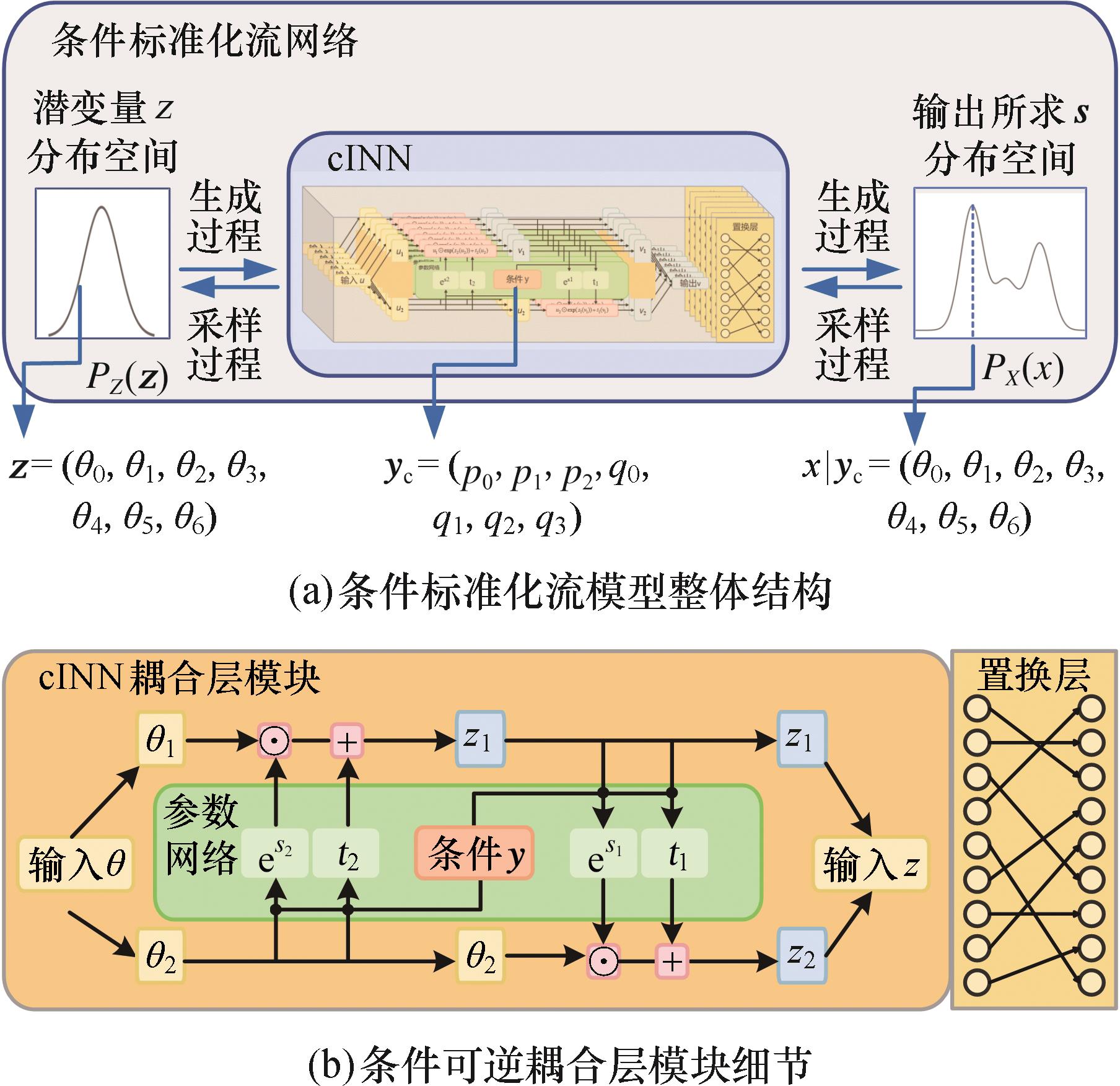
Fig.2 Network architecture diagram of CNF module
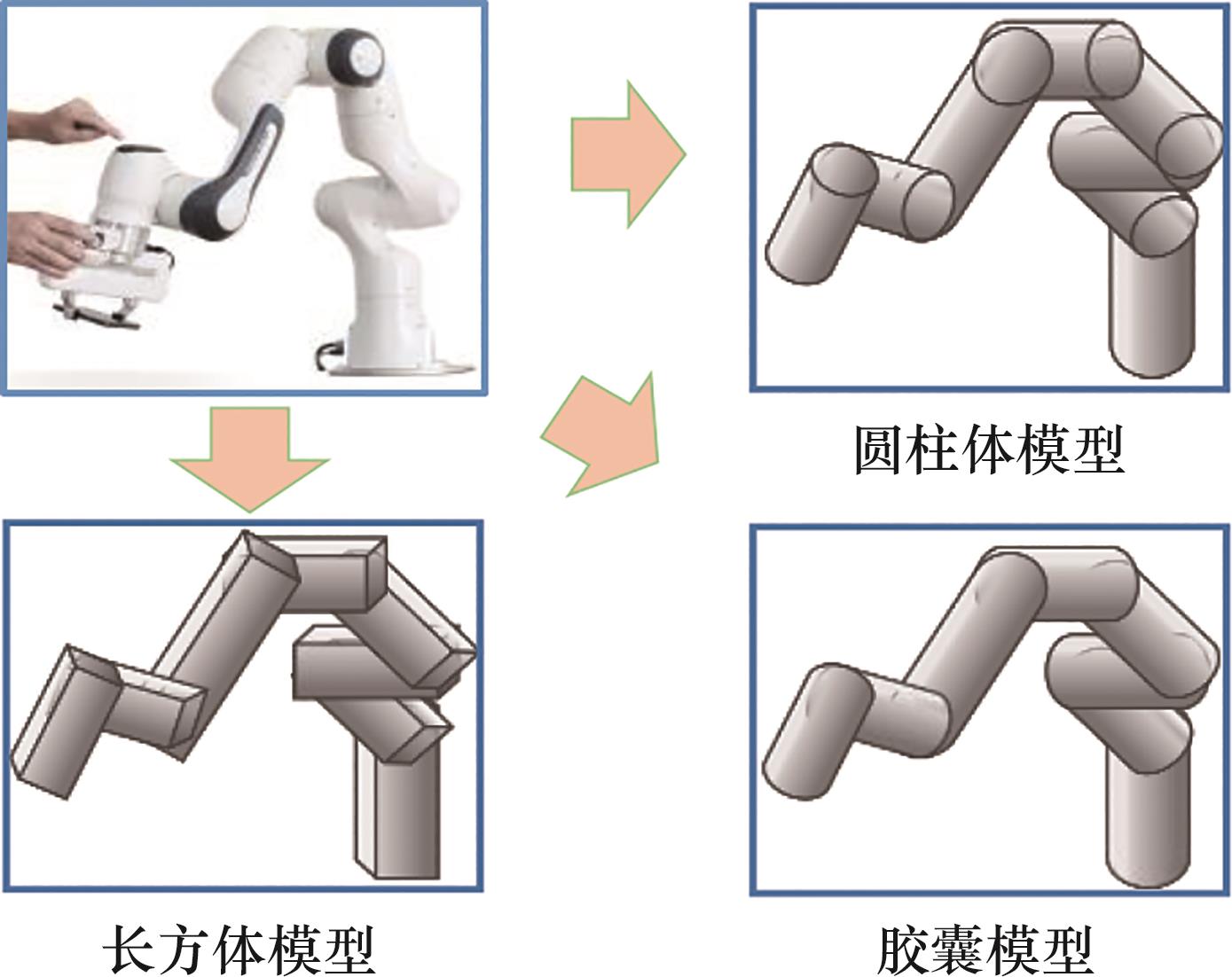
Fig.3 Robot collision detection models
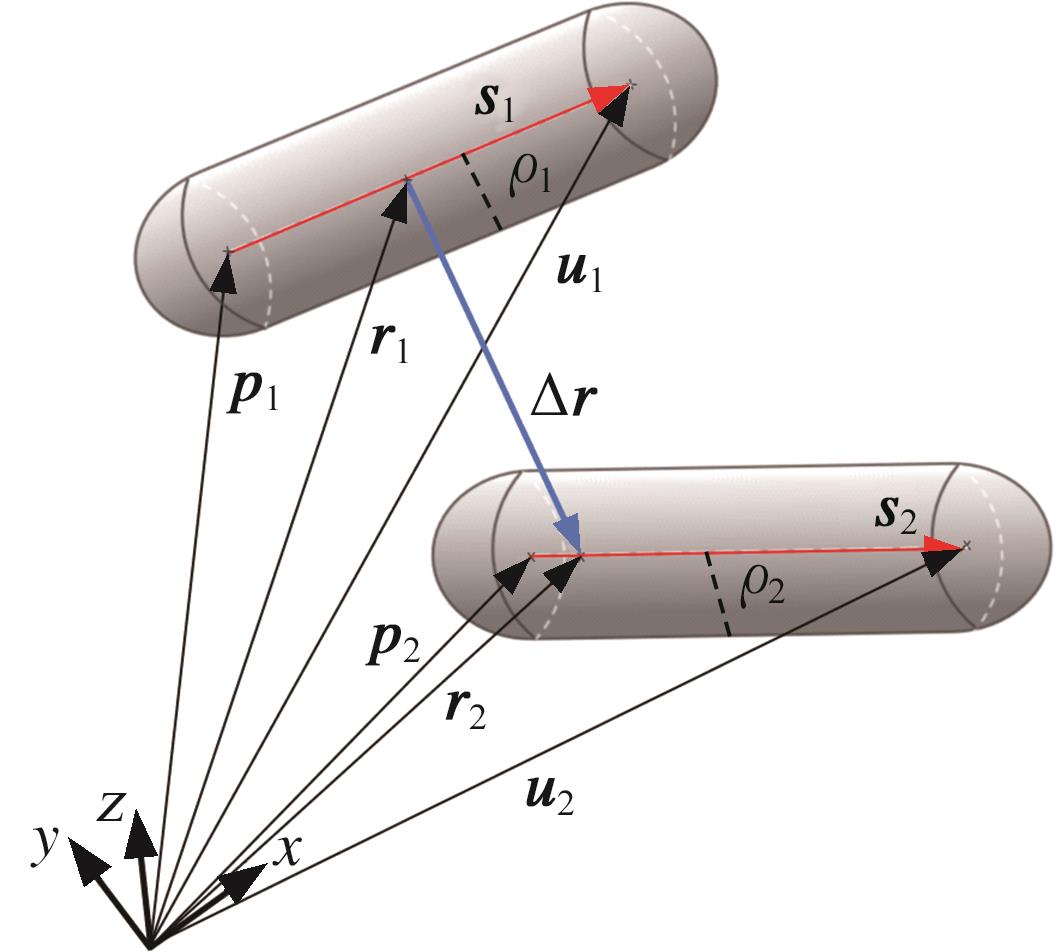
Fig.4 The minimum distance Δr between capsules
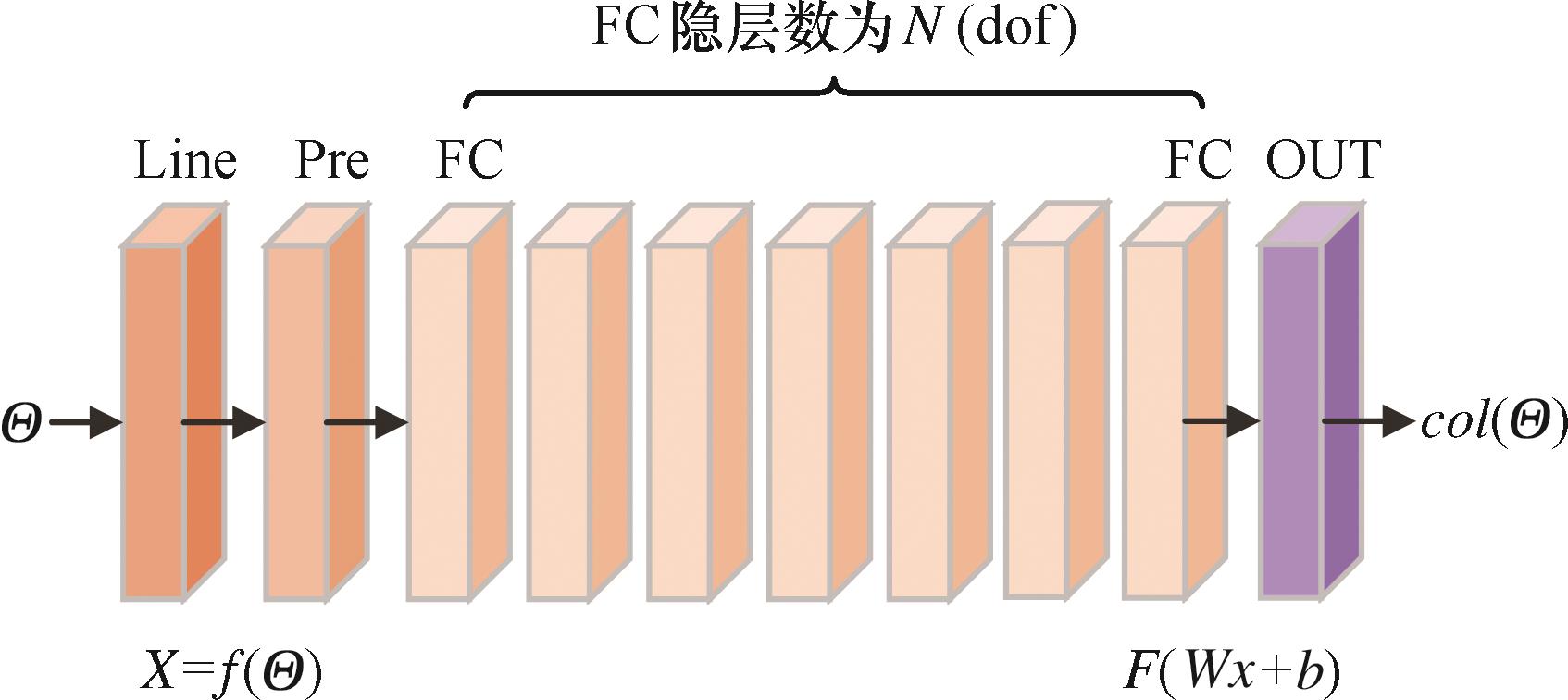
Fig.5 Multi-layer perceptron
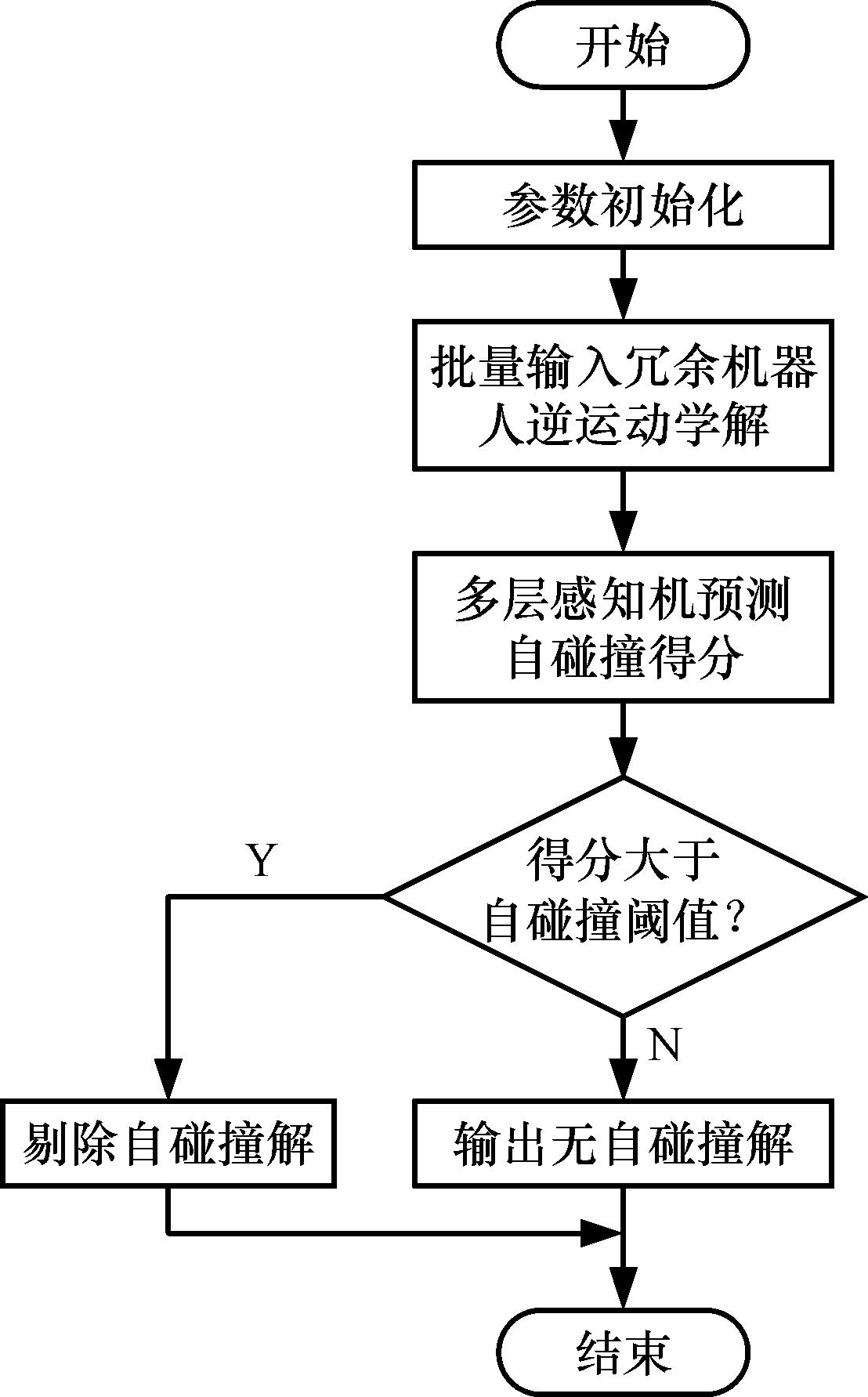
Fig.6 Self collision detection flowchart
| 模型 | MMD 得分 |
|---|---|
| INN | 0.061 |
| cINN | 0.058 |
| CGAN(Cycle IK) | 0.037 |
| CNL(IKFLOW) | 0.033 |
| CNF(NOC-IK) | 0.031 |
Tab.1 MMD scores of generative networks
| 模型 | MMD 得分 |
|---|---|
| INN | 0.061 |
| cINN | 0.058 |
| CGAN(Cycle IK) | 0.037 |
| CNL(IKFLOW) | 0.033 |
| CNF(NOC-IK) | 0.031 |
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 3.3376 | 1.4405 | 8.4781 | 6.052 |
| Panda | 12 | 6.3605 | 0.6826 | 2.2817 | 4.564 |
| Fetch | 12 | 6.1903 | 1.4507 | 0.7864 | 2.976 |
| Fetch | 16 | 7.29508 | 0.9792 | 3.6491 | 2.192 |
| Iiwa7 | 12 | 10.0659 | 2.0168 | 3.6801 | 0.028 |
Tab.2 IKFLOW inverse kinematics solution results
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 3.3376 | 1.4405 | 8.4781 | 6.052 |
| Panda | 12 | 6.3605 | 0.6826 | 2.2817 | 4.564 |
| Fetch | 12 | 6.1903 | 1.4507 | 0.7864 | 2.976 |
| Fetch | 16 | 7.29508 | 0.9792 | 3.6491 | 2.192 |
| Iiwa7 | 12 | 10.0659 | 2.0168 | 3.6801 | 0.028 |
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 2.0621 | 1.0177 | 5.0036 | 2.330 |
| Panda | 12 | 3.9418 | 0.6808 | 2.1554 | 1.584 |
| Fetch | 12 | 3.9242 | 1.4843 | 0.6724 | 3.004 |
| Fetch | 16 | 5.1982 | 0.8601 | 1.8602 | 1.660 |
| Iiwa7 | 12 | 7.9731 | 1.3409 | 3.1826 | 0 |
Tab.3 NOC-IK(CNF)inverse kinematics solution results
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 2.0621 | 1.0177 | 5.0036 | 2.330 |
| Panda | 12 | 3.9418 | 0.6808 | 2.1554 | 1.584 |
| Fetch | 12 | 3.9242 | 1.4843 | 0.6724 | 3.004 |
| Fetch | 16 | 5.1982 | 0.8601 | 1.8602 | 1.660 |
| Iiwa7 | 12 | 7.9731 | 1.3409 | 3.1826 | 0 |
Fig.7 Comparison of average pose errors of robots
| 方法 | 每个解的时间/ms | 输出自碰撞解个数 |
|---|---|---|
| FCL | 1.5855 | 0 |
| 7.4157 | 0 | |
| MLP | 0.2651 | 0 |
Tab.4 Self-collision detection results
| 方法 | 每个解的时间/ms | 输出自碰撞解个数 |
|---|---|---|
| FCL | 1.5855 | 0 |
| 7.4157 | 0 | |
| MLP | 0.2651 | 0 |
| 模块 | 均方误差/cm | 平均自碰撞 概率/% | 每个解的 时间/ms |
|---|---|---|---|
| CNF | 0.682 | 2.572 | 5.9743 |
| CNF+L-M | 0.001 | 3.135 | 7.3429 |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
Tab.5 Experimental results of ablation
| 模块 | 均方误差/cm | 平均自碰撞 概率/% | 每个解的 时间/ms |
|---|---|---|---|
| CNF | 0.682 | 2.572 | 5.9743 |
| CNF+L-M | 0.001 | 3.135 | 7.3429 |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
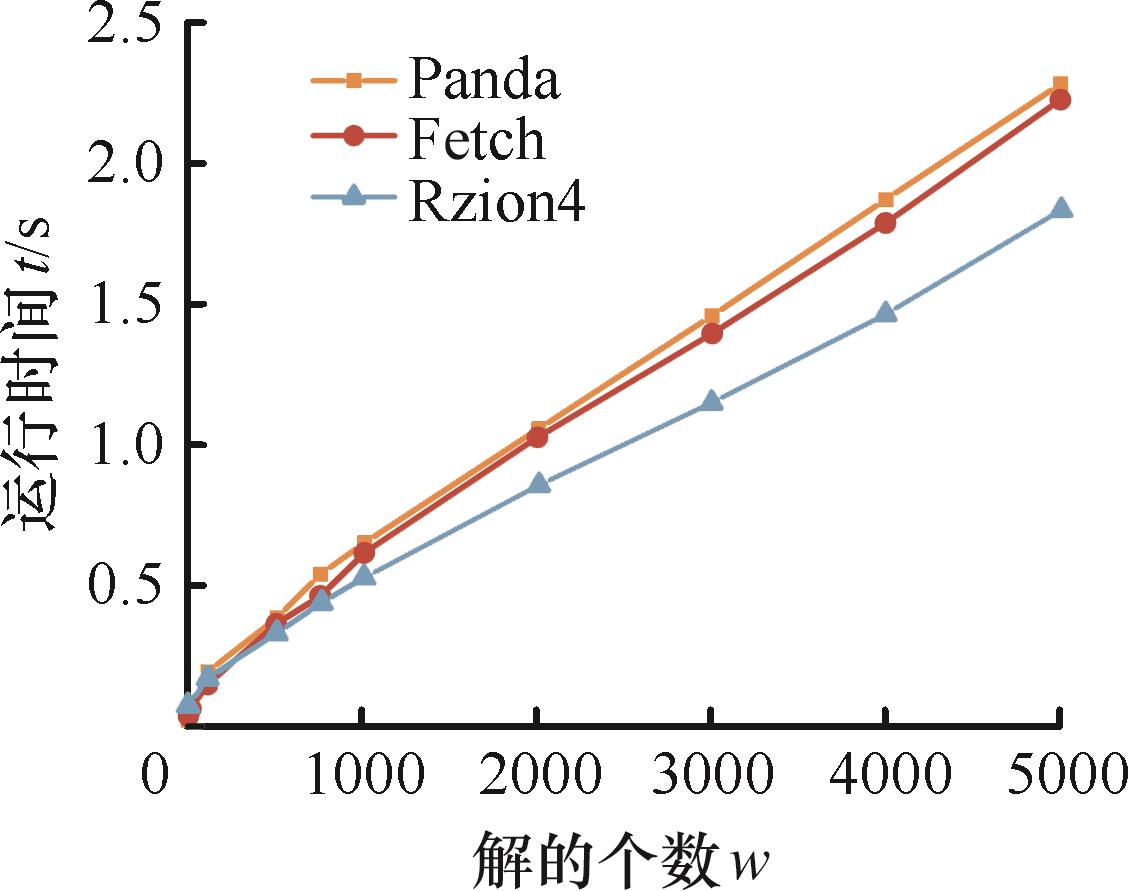
Fig.8 Total running time of NOC-IK
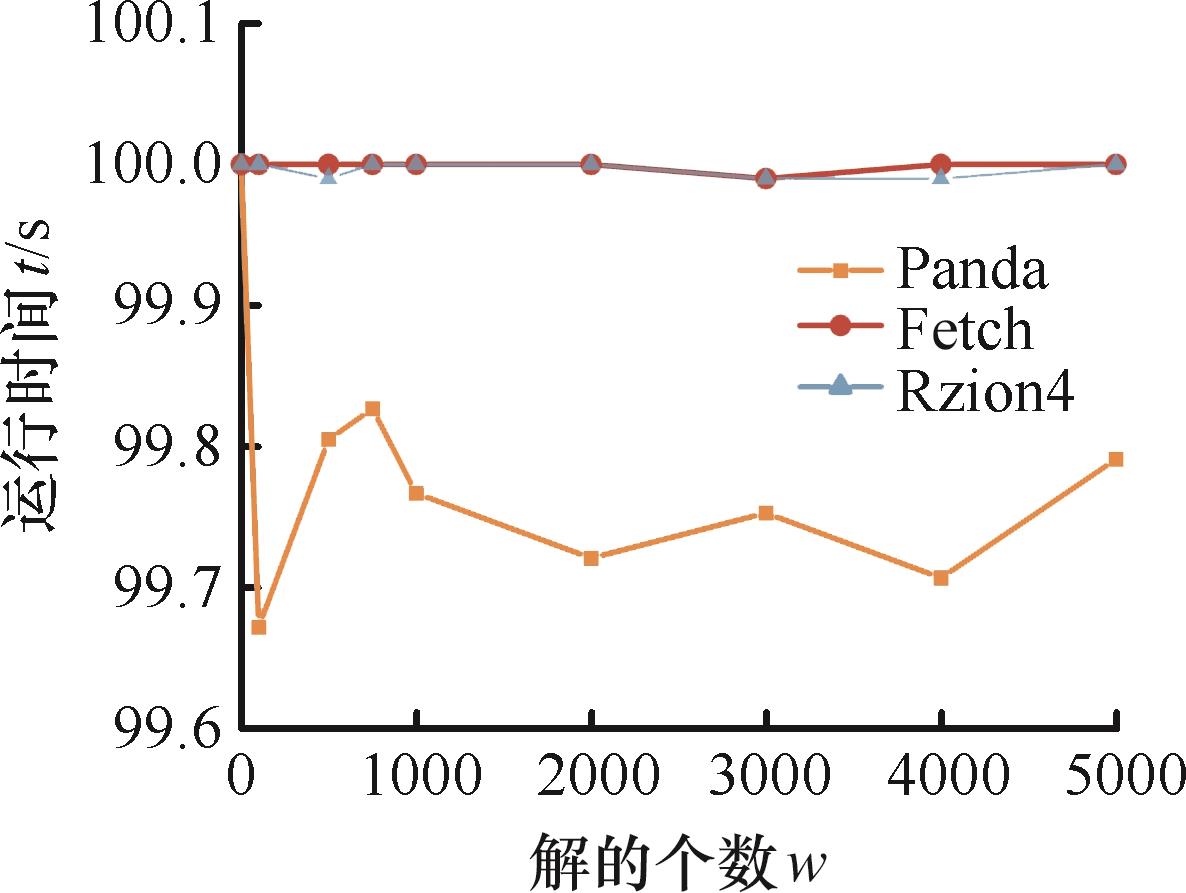
Fig.9 The self-collision probability
| 模型 | 均方误差/cm | 平均自碰撞概率/% | 每个解的 时间/ms |
|---|---|---|---|
| B-NAFs | 3.871 | 0.300 | 0.6800 |
| BP | 0.980 | 16.7800 | |
| ResNet-BP | 0.600 | 8.7000 | |
| IKFLOW | 0.772 | 6.732 | 6.7322 |
| CycleIK[ | 0.570 | 0.4100 | |
| CycleIK-Gaikpy[ | 0.051 | 20.0071 | |
| CNN | 0.012 | 12.9600 | |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
Tab.6 The results of comparison with other models
| 模型 | 均方误差/cm | 平均自碰撞概率/% | 每个解的 时间/ms |
|---|---|---|---|
| B-NAFs | 3.871 | 0.300 | 0.6800 |
| BP | 0.980 | 16.7800 | |
| ResNet-BP | 0.600 | 8.7000 | |
| IKFLOW | 0.772 | 6.732 | 6.7322 |
| CycleIK[ | 0.570 | 0.4100 | |
| CycleIK-Gaikpy[ | 0.051 | 20.0071 | |
| CNN | 0.012 | 12.9600 | |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
| [1] | 欧群文,贠超,杨学兵,等.基于神经网络的冗余机械臂运动学逆解研究[J].机电工程,2016,33(6):663-667. |
| Qunwen OU, YUN Chao, YANG Xuebing, et al. Algorithm Based on Neural Network for Inverse Kinematics of Redundant Manipulator[J] Journal of Mechanical & Electrical Engineering, 2016,33 (6): 663-667. | |
| [2] | 李进,刘璇,张建华,等.基于RBF神经网络间接求取运动学逆解的研究[J].机床与液压,2019,47(23):32-37. |
| LI Jin, LIU Xuan, ZHANG Jianhua, et al. Research on Indirect Solution of Inverse Kinematics Based on RBF Neural Network[J]. Machine Tool & Hydraulics, 2019,47(23):32-37. | |
| [3] | 刘世平,曹俊峰,孙涛,等.基于BP神经网络的冗余机械臂逆运动学分析[J].中国机械工程, 2019,30(24): 2974-2977. |
| LIU Shiping, CAO Junfeng, SUN Tao, et al. Inverse Kinematics Analysis of Redundant Manipulators Based on BP Neural Network[J]. China Mechanical Engineering,2019,30(24):2974-2977. | |
| [4] | 刘世平,夏文杰,陈萌,等.基于卷积神经网络的冗余机械臂运动学逆解求解[J].载人航天,2022,28(1):10-15. |
| LIU Shiping, XIA Wenjie, CHEN Meng, et al. Inverse Kinematics Solution of Redundant Manipulator Based on Convolution Neural Networks[J]. Manned Spaceflight,2022,28(1):10-15. | |
| [5] | 石建平.基于粒子群优化算法的冗余机械臂运动学逆解[J].贵阳学院学报(自然科学版),2020,15(3):48-52. |
| SHI Jianping. Inverse Kinematics Solution of Redundant Manipulator Based on Particle Swarm Optimization Algorithm[J]. Journal of Guiyang University(Natural Sciences),2020,15(3):48-52. | |
| [6] | ARDIZZONE L, KRUSE J, WIRKERT S, et al. Analyzing Inverse Problems with Invertible Neural Networks[C]∥International Conference on Learning Representations (ICLR).New Orleans, 2019:1808.04730. |
| [7] | GARG S, DUDEJA S, RASTOGI V. Inverse Kinematics of Tendon Driven Continuum Robots Using Invertible Neural Network[C]∥2022 2nd International Conference on Computers and Automation (CompAuto). Paris, 2022: 82-86. |
| [8] | AMES B, MORGAN J, KONIDARIS G. IKFLOW: Generating Diverse Inverse Kinematics Solutions[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 7177-7184. |
| [9] | PAPAMAKARIOS G, NALISNICK E, JIMENEZ REZENDE D, et al. Normalizing Flows for Probabilistic Modeling and Inference[J]. Journal of Machine Learning Research,2019, 57(22):64. |
| [10] | KINGMA D P, DHARIWAL P. GLOW: Generative Flow with Invertible 1×1 Convolutions[C]∥The 32nd International Conference on Neural Information Processing Systems (NIPS'18). Red Hook, 2018: 10236-10245. |
| [11] | BEESON P, AMES B. TRAC-IK: an Open-source Library for Improved Solving of Generic Inverse Kinematics[C]∥2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). Seoul, 2015: 928-935. |
| [12] | HABEKOST J G, STRAHL E, ALLGEUER P, et al. CycleIK: Neuro-inspired Inverse Kinematics[C]∥ International Conference on Artificial Neural Networks. Heraklion, 2023: 457-470. |
| [13] | ZHU J Y, PARK T, ISOLA P, et al. Unpaired Image-to-image Translation Using Cycle-consistent Adversarial Networks [C] ∥Proceedings of the IEEE International Conference on Computer Vision. Venice, 2017: 2223-2232. |
| [14] | KERZEL M, ALLGEUER P, STRAHL E, et al. Nicol: a Neuro-inspired Collaborative Semi-humanoid Robot that Bridges Social Interaction and Reliable Manipulation[J].IEEE Access,2023, 11: 123531-123542. |
| [15] | DEMBY’S J, GAO Y, DESOUZA G N. A Study on Solving the Inverse Kinematics of Serial Robots Using Artificial Neural Network and Fuzzy Neural Network[C]∥2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE).New Orleans, 2019: 1-6. |
| [16] | GILBERT E G, FOO C P. Computing the Distance between General Convex Objects in Three-dimensional Space[J]. IEEE Transactions on Robotics and Automation, 1990, 6(1): 53-61. |
| [17] | SAFEEA M, NETO P, BEAREE R. Efficient Calculation of Minimum Distance Between Capsules and Its Use in Robotics[J]. IEEE Access, 2018, 7: 5368-5373. |
| [18] | NVIDIA GPU Technology Conference GTC). Warp: a High-performance Python Framework for GPU Simulation and Graphics[EB/OL].(2022-03-31)[2025-01-03].. |
| [19] | KIM H, LEE H, KANG W H, et al. Softflow: Probabilistic Framework for Normalizing Flow on Manifolds[J]. Neural Information Processing Systems, 2020, 33: 16388-16397. |
| [20] | PADMANABHA G A, ZABARAS N. Solving Inverse Problems Using Conditional Invertible Neural Networks[J]. Journal of Computational Physics, 2021, 433: 110194. |
| [21] | 李佳,邱伟,邹劭芬.基于改进LM-GN算法的磁性目标定位方法研究[J].数字海洋与水下攻防, 2023,6(5): 552-561. |
| LI Jia, QIU Wei, ZOU Shaofen. Research on Magnetic Target Localization Based on Improved LM-GN Algorithm[J]. Digital Ocean & Underwater Warfare, 2023,6(5):552-561. | |
| [22] | 李国民,宿梦瑶,朱代先.光束平差法中的一种改进LM算法[J].西安科技大学学报,2022,42(1):152-159. |
| LI Guoming, SU Mengyao, ZHU Daixian. An Improved LM Algorithm in Bundle Adjustment[J]. Journal of Xi'an University of Science and Technology, 2022,42(1): 152-159. | |
| [23] | RAKITA D, MUTLU B, GLEICHER M. RelaxedIK: Real-time Synthesis of Accurate and Feasible Robot Arm Motion[C]∥Robotics: Science and Systems (RSS 2018.Pittsburgh, 2018:46968269. |
| [1] | WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2885-2893. |
| [2] | Jiaxiang DONG, Quanquan LIU, Xiping HU, Xuezhi ZHAO. Kinematic Modeling of a Novel Rigid⁃Flexible Hybrid Continuum Robots [J]. China Mechanical Engineering, 2025, 36(11): 2678-2684. |
| [3] | WANG Zhiqiang1, HAN Jianhai1, 2, 3, LI Xiangpan1, 2, GUO Bingjing1, 2, DU Ganqin4. Cartesian Space Screw Linear Interpolation Trajectory Planning for Redundant Robots [J]. China Mechanical Engineering, 2025, 36(01): 104-112. |
| [4] | CHEN Zhuofan, ZHOU Kun, QIN Feifei, WANG Binrui. Inverse Kinematics Solution of Robots Based on IQPSO Algorithm [J]. China Mechanical Engineering, 2024, 35(02): 293-304. |
| [5] | RONG Yu, DOU Tianci, ZHANG Xingchao, ZHANG LeiZ, HAO Jingyu. A Real-time Control Method for Optimal Overall Performances of Planar Redundant Robots [J]. China Mechanical Engineering, 2022, 33(16): 1928-1939. |
| [6] | LIU Xuemei, FENG Yan, YANG Zhen, LI Aiping, LU Junguo. IAFSA for Solving Inverse Kinematics of Redundant Robotic Spraying System [J]. China Mechanical Engineering, 2022, 33(11): 1317-1323. |
| [7] | LIU Xiuying, ZHANG Jianjun, LIU Chenglei, NIU Jianye, QI Kaicheng, GUO Shijie. Kinematic Parameter Optimization of Workspace-based Generalized Spherical Parallel Robots for Ankle Joint Rehabilitation [J]. China Mechanical Engineering, 2021, 32(16): 1921-1929. |
| [8] | ZHANG Yue, DONG Lei, HUAN Ronghua, HUANG Zhilong. Design and Kinematic Analysis of Crawler-type Pipeline Endoscope Robots for Wind Turbine Blades#br# [J]. China Mechanical Engineering, 2021, 32(15): 1884-1889. |
| [9] | JI Yangzhen, HOU Li, LUO Lan, LUO Pei, LIU Xubin, LIANG Shuang. Solution of Inverse Kinematics for 6R Robots Based on Combinatorial Optimization Algorithm#br# [J]. China Mechanical Engineering, 2021, 32(10): 1222-1232. |
| [10] | LIU Shiping;CAO Junfeng;SUN Tao;HU Jiangbo;FU Yan;ZHANG Shuai;LI Shiqi. Inverse Kinematics Analysis of Redundant Manipulators Based on BP Neural Network [J]. China Mechanical Engineering, 2019, 30(24): 2974-2977,2985. |
| [11] | XIAO Fan;LI Guang;YOU Yulong. Multiple Module Neural Network Solving for Inverse Kinematics of Space 3R Manipulators [J]. China Mechanical Engineering, 2019, 30(10): 1233-1238. |
| [12] | PEI Jiufang;XU Dezhang;WANG Hai. Inverse Kinematics Analyses of 3-finger Robot Dexterous Hand Based on Screw Theory [J]. China Mechanical Engineering, 2017, 28(24): 2975-2980. |
| [13] | Xia Boxiong, Du Jun. Reconfigurable Robot Modeling and Experiments Based on 5-axis Machining System for Complex Parts [J]. China Mechanical Engineering, 2014, 25(9): 1208-1213. |
| [14] | Yang Zhen, Yang Wenyu, Zhang Xiaoping. Singularity Robustness Algorithm for Robot Inverse Kinematics [J]. China Mechanical Engineering, 2014, 25(8): 995-1000. |
| [15] | WEI Xiu-Ting-1, LI Gang-1, DU Jiang-2, CHEN Qian-Qian-1. Kinematic Analysis and Workspace Calculation of a 6-PTRT Manipulator for Chamfering Gear Addendum [J]. China Mechanical Engineering, 2013, 24(6): 750-754. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||