

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (9): 1951-1960.DOI: 10.3969/j.issn.1004-132X.2025.09.006
Ningning HUANG1( ), Jingjing YOU1,2(), Pengda YE3, Huiping SHEN3, Chenggang LI4, Hongtao WU4
), Jingjing YOU1,2(), Pengda YE3, Huiping SHEN3, Chenggang LI4, Hongtao WU4
Received:2024-06-10
Online:2025-09-25
Published:2025-10-15
Contact:
Jingjing YOU
黄宁宁1(), 尤晶晶1,2(), 叶鹏达3, 沈惠平3, 李成刚4, 吴洪涛4
通讯作者:
尤晶晶
作者简介:黄宁宁,男,1999年生,硕士研究生。研究方向为并联机器人机构学。E-mail:huangningning1819@163.com。
基金资助:CLC Number:
Ningning HUANG, Jingjing YOU, Pengda YE, Huiping SHEN, Chenggang LI, Hongtao WU. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms[J]. China Mechanical Engineering, 2025, 36(9): 1951-1960.
黄宁宁, 尤晶晶, 叶鹏达, 沈惠平, 李成刚, 吴洪涛. 一种运动可解耦的Stewart型并联机构的正运动学及奇异性[J]. 中国机械工程, 2025, 36(9): 1951-1960.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.09.006
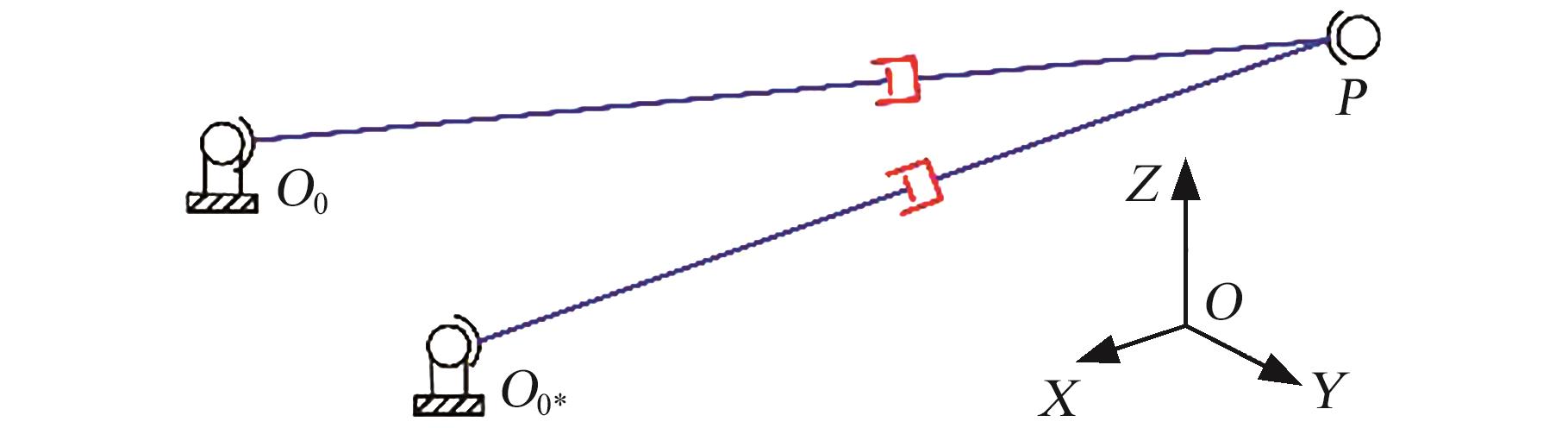
Fig.1 “2-1” kinamatic link
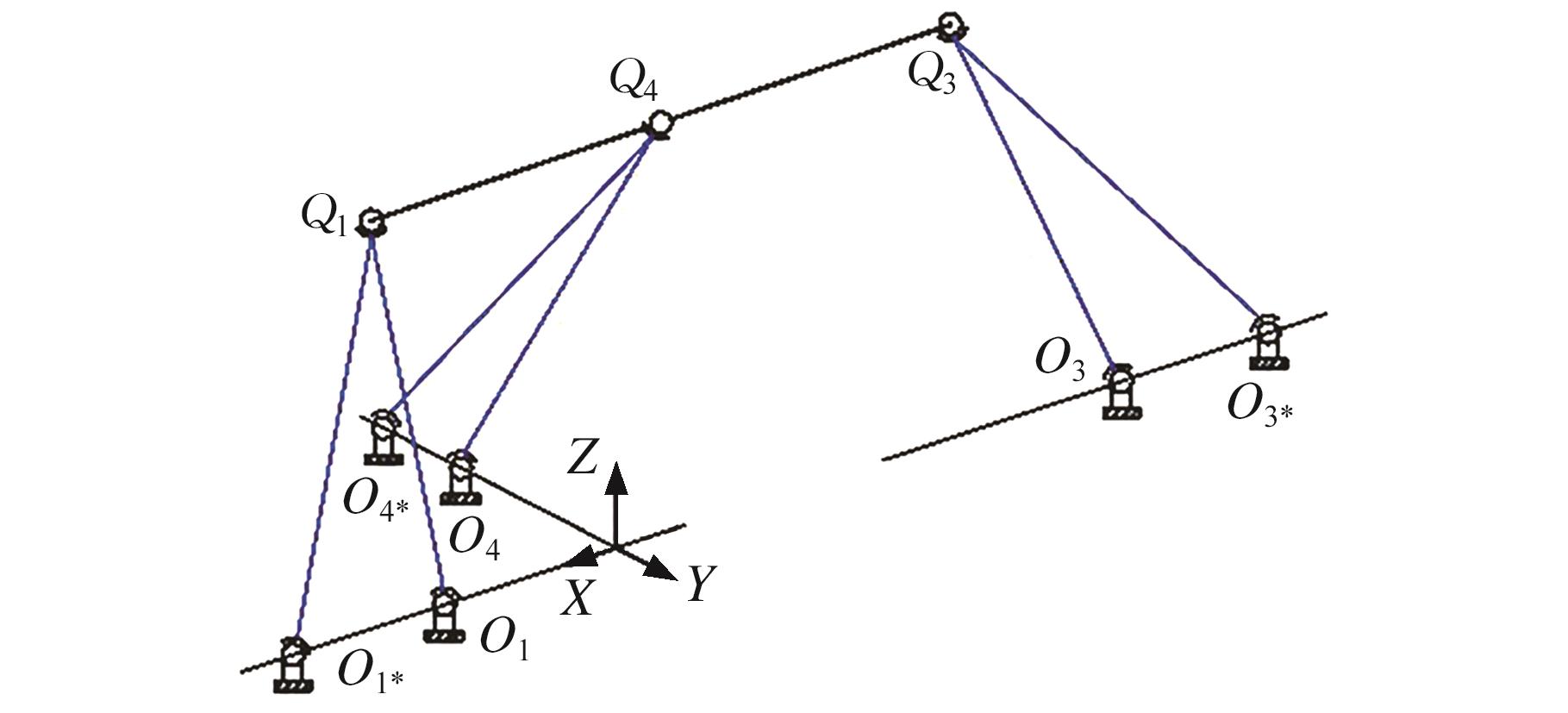
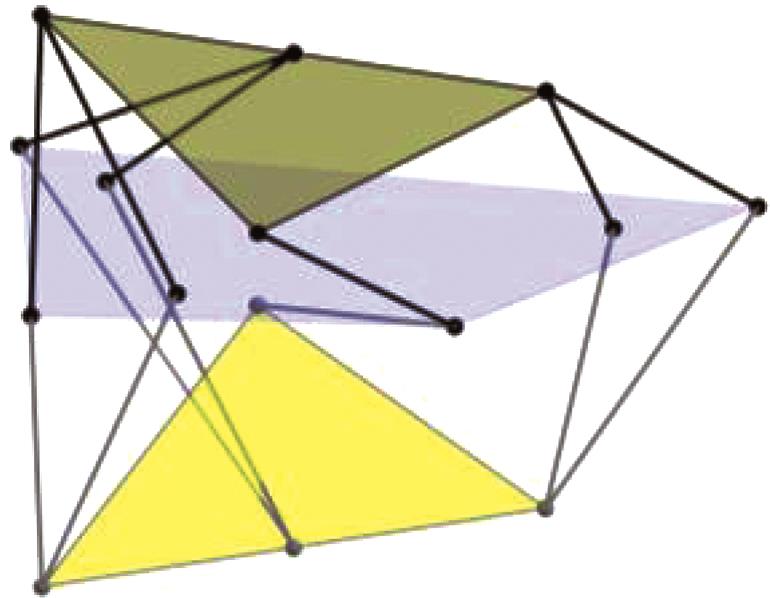
Fig.2 “6-3” Stewart-type parallel mechanism
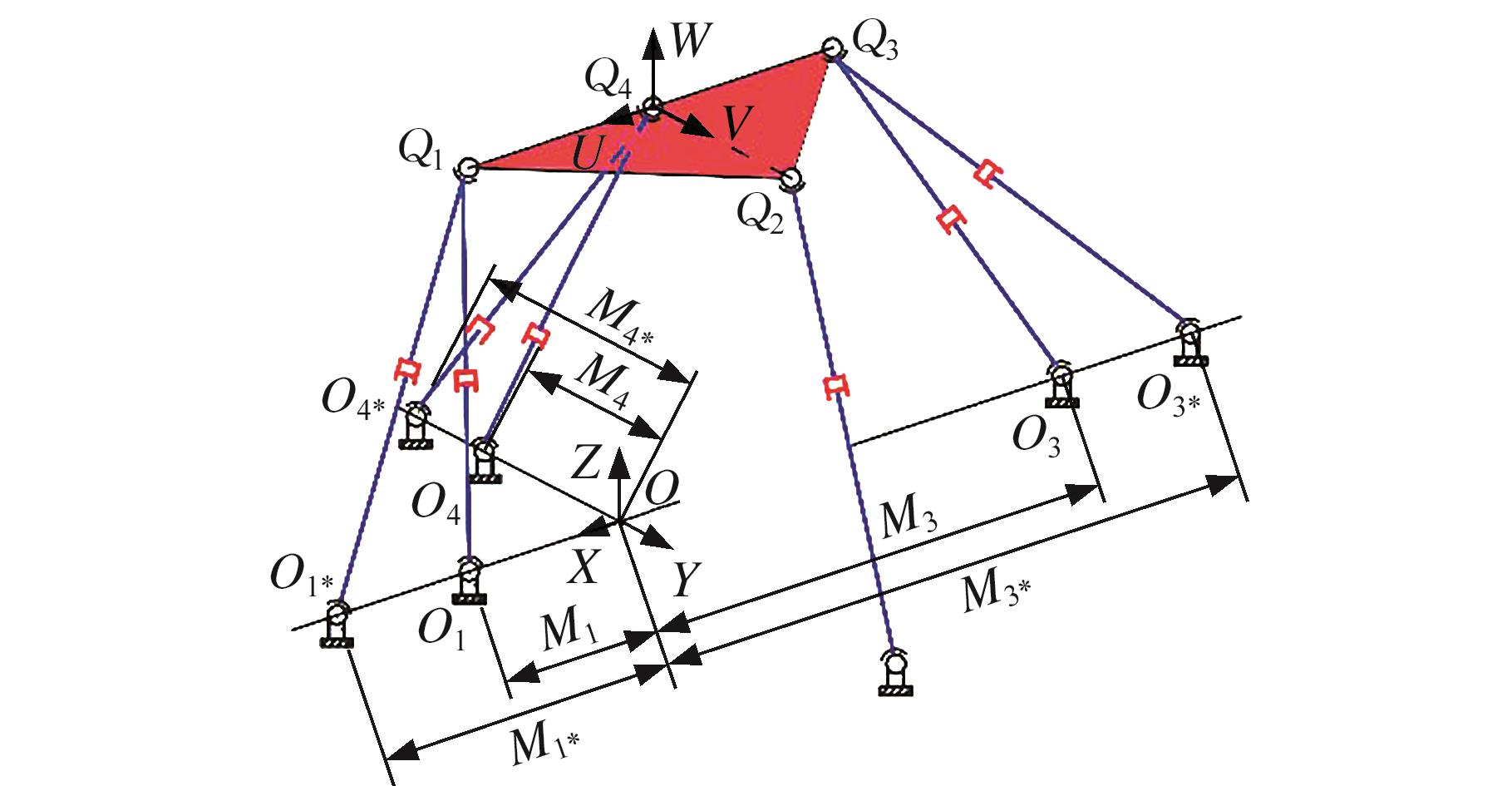
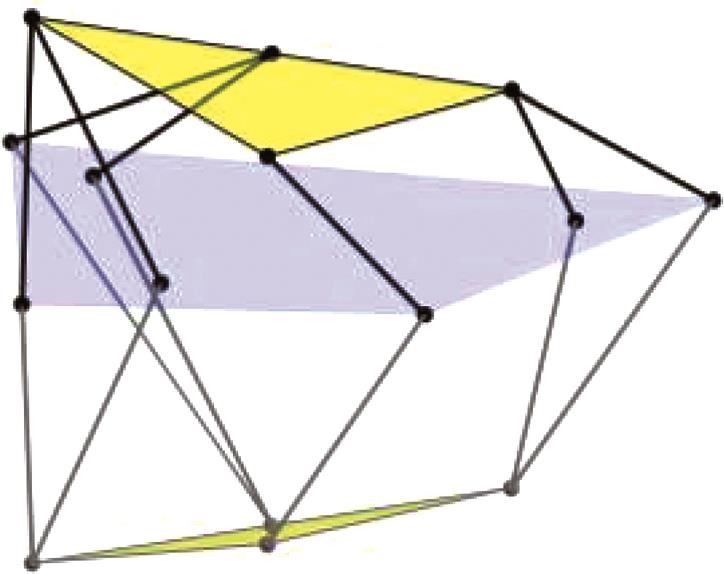
Fig.3 “7-4” Stewart-type parallel mechanism
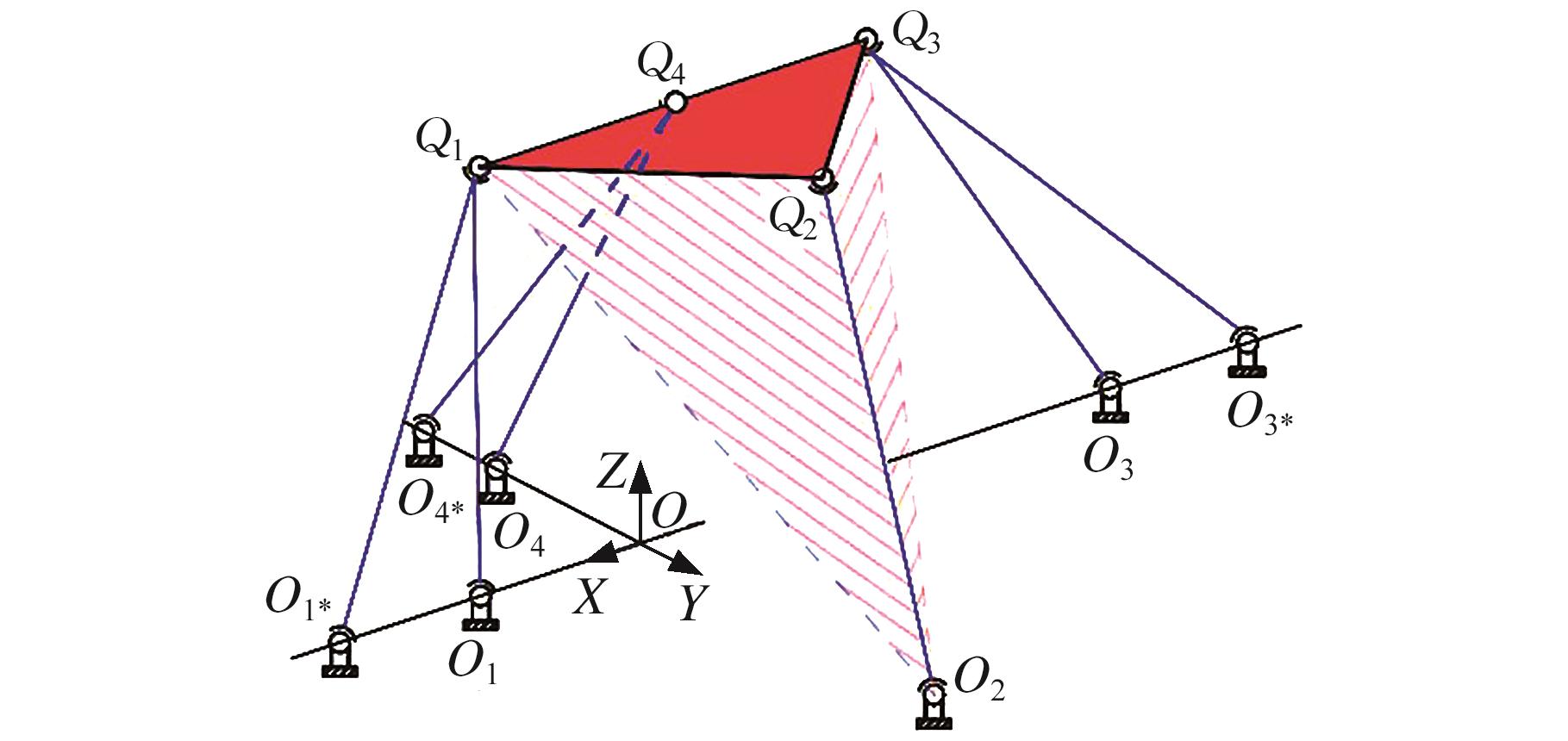
Fig.4 Tetrahedron Q2O2Q3Q1
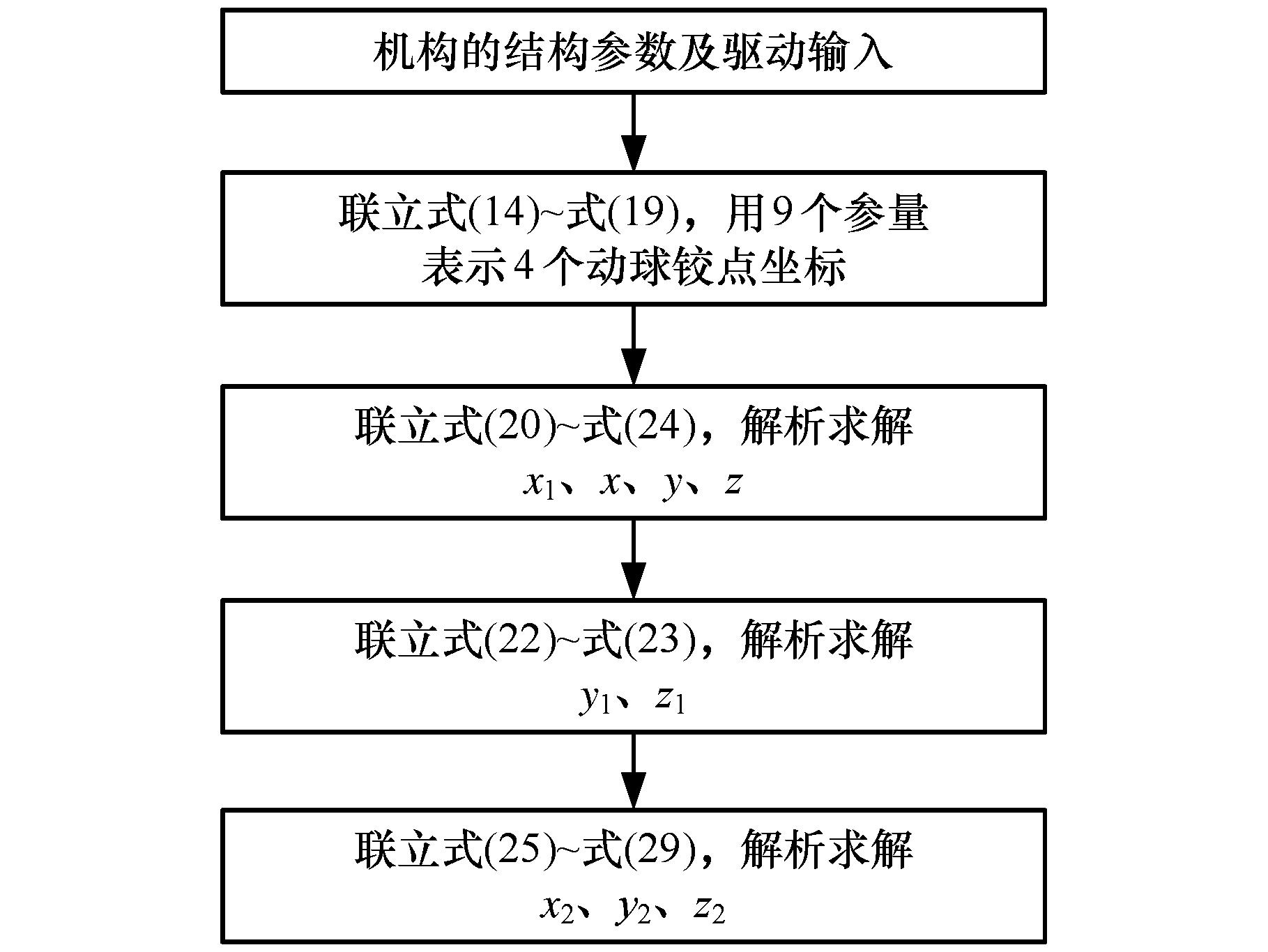
Fig.5 Process of forward position solution
| 组别 | Q4 | Q1 | Q2 |
|---|---|---|---|
| 1 | (1)Q4 | (1)Q1(1) | (1)Q2(1) |
| 2 | (1)Q2(2) | ||
| 3 | (1)Q1(2) | (1)Q2(3) | |
| 4 | (1)Q2(4) | ||
| 5 | (2)Q4 | (2)Q1(1) | (2)Q2(1) |
| 6 | (2)Q2(2) | ||
| 7 | (2)Q1(2) | (2)Q2(3) | |
| 8 | (2)Q2(4) |
Tab.1 Multiple solutions of forward kinematics
| 组别 | Q4 | Q1 | Q2 |
|---|---|---|---|
| 1 | (1)Q4 | (1)Q1(1) | (1)Q2(1) |
| 2 | (1)Q2(2) | ||
| 3 | (1)Q1(2) | (1)Q2(3) | |
| 4 | (1)Q2(4) | ||
| 5 | (2)Q4 | (2)Q1(1) | (2)Q2(1) |
| 6 | (2)Q2(2) | ||
| 7 | (2)Q1(2) | (2)Q2(3) | |
| 8 | (2)Q2(4) |
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| M1 | 20.000 | M4 | 50.000 | L4 | 67.823 |
| M1* | 40.000 | M4* | 70.000 | L4* | 86.023 |
| x′ | 0.000 | L1 | 38.356 | N1 | 30.000 |
| y′ | 30.000 | L1* | 35.323 | N2 | 42.426 |
| z′ | 0.000 | L2 | 35.868 | N3 | 42.426 |
| M3 | 40.000 | L3 | 43.111 | ||
| M3* | 60.000 | L3* | 56.878 | ||
Tab.2 Mechanism parameters and input parameters mm
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| M1 | 20.000 | M4 | 50.000 | L4 | 67.823 |
| M1* | 40.000 | M4* | 70.000 | L4* | 86.023 |
| x′ | 0.000 | L1 | 38.356 | N1 | 30.000 |
| y′ | 30.000 | L1* | 35.323 | N2 | 42.426 |
| z′ | 0.000 | L2 | 35.868 | N3 | 42.426 |
| M3 | 40.000 | L3 | 43.111 | ||
| M3* | 60.000 | L3* | 56.878 | ||
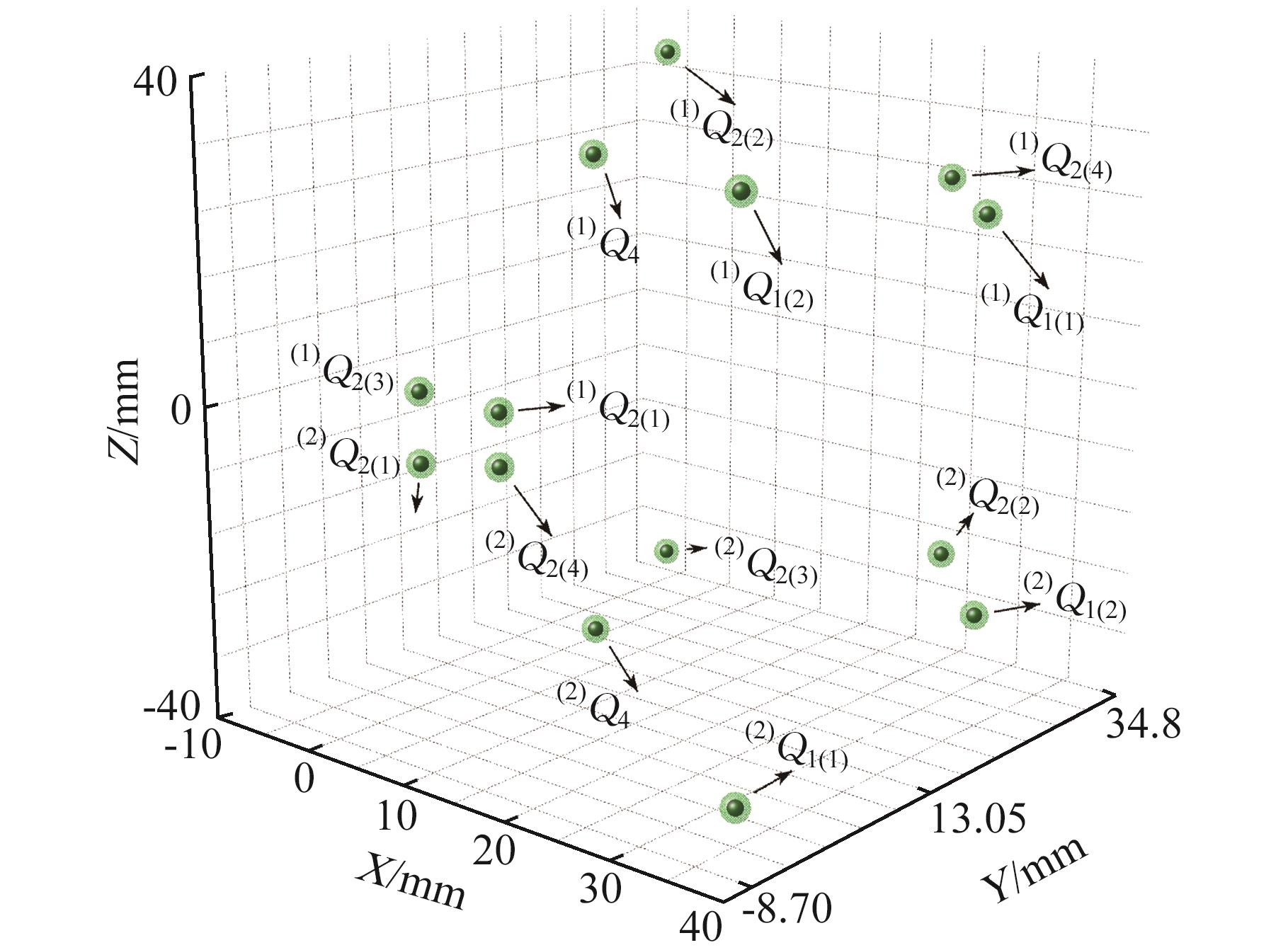
Fig.6 Theoretical calculation and virtual test results
| 第1、5组解对称 | 第2、6组解对称 |
|---|---|
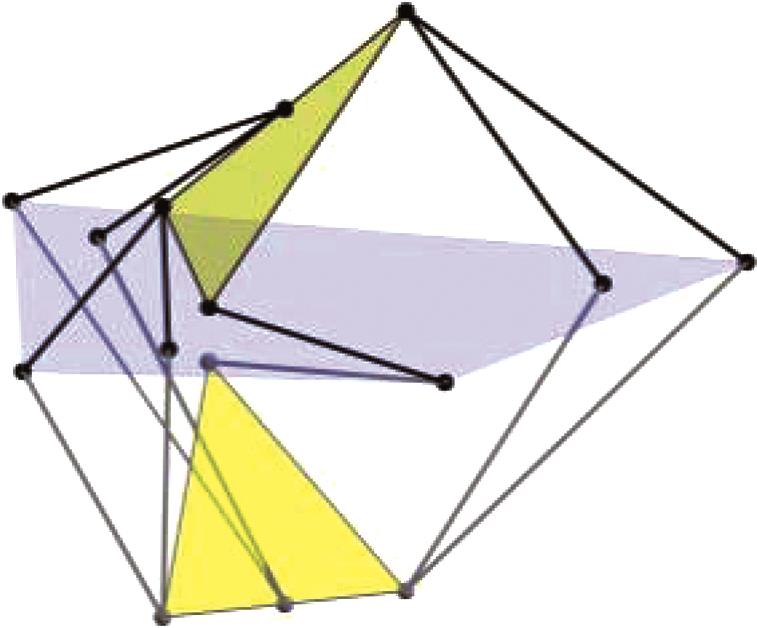 | 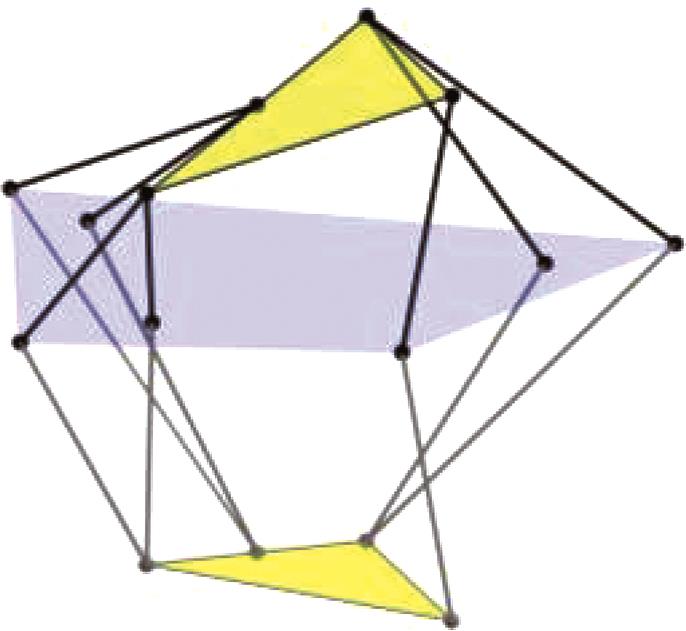 |
| 第3、7组解对称 | 第4、8组解对称 |
 |  |
Tab.3 Schematic diagram of mechanism configuration
| 第1、5组解对称 | 第2、6组解对称 |
|---|---|
| |
| 第3、7组解对称 | 第4、8组解对称 |
| |
| 任意选取的数据/mm | 理论计算/mm | 试验测量/mm | |||||
|---|---|---|---|---|---|---|---|
| L1* | L3 | L3* | L4 | L4* | L1 | ||
| 1 | 35.322 97 | 43.1105 4 | 56.877 73 | 67.823 30 | 86.023 25 | 38.353 63 | 38.353 63 |
| 2 | 40.176 93 | 59.772 10 | 72.626 50 | 75.952 01 | 94.417 73 | 34.857 32 | 34.857 32 |
| 3 | 46.904 13 | 103.453 64 | 114.832 72 | 100.749 83 | 117.764 71 | 43.452 25 | 43.452 25 |
Tab.4 Theoretical calculation and experimental measurement data
| 任意选取的数据/mm | 理论计算/mm | 试验测量/mm | |||||
|---|---|---|---|---|---|---|---|
| L1* | L3 | L3* | L4 | L4* | L1 | ||
| 1 | 35.322 97 | 43.1105 4 | 56.877 73 | 67.823 30 | 86.023 25 | 38.353 63 | 38.353 63 |
| 2 | 40.176 93 | 59.772 10 | 72.626 50 | 75.952 01 | 94.417 73 | 34.857 32 | 34.857 32 |
| 3 | 46.904 13 | 103.453 64 | 114.832 72 | 100.749 83 | 117.764 71 | 43.452 25 | 43.452 25 |
| aj | |
|---|---|
| b1 | |
| d1 | |
| a2 | |
| b2 | |
| d2 | |
| ae | |
| b3 | |
| d3 | |
| a4 | |
| bh | |
| d4 | |
| Bj | |
| Dj | |
| Be | |
| De | |
| A2 | |
| B2 | |
| D2 |
Tab.5 Some elements in J
| aj | |
|---|---|
| b1 | |
| d1 | |
| a2 | |
| b2 | |
| d2 | |
| ae | |
| b3 | |
| d3 | |
| a4 | |
| bh | |
| d4 | |
| Bj | |
| Dj | |
| Be | |
| De | |
| A2 | |
| B2 | |
| D2 |
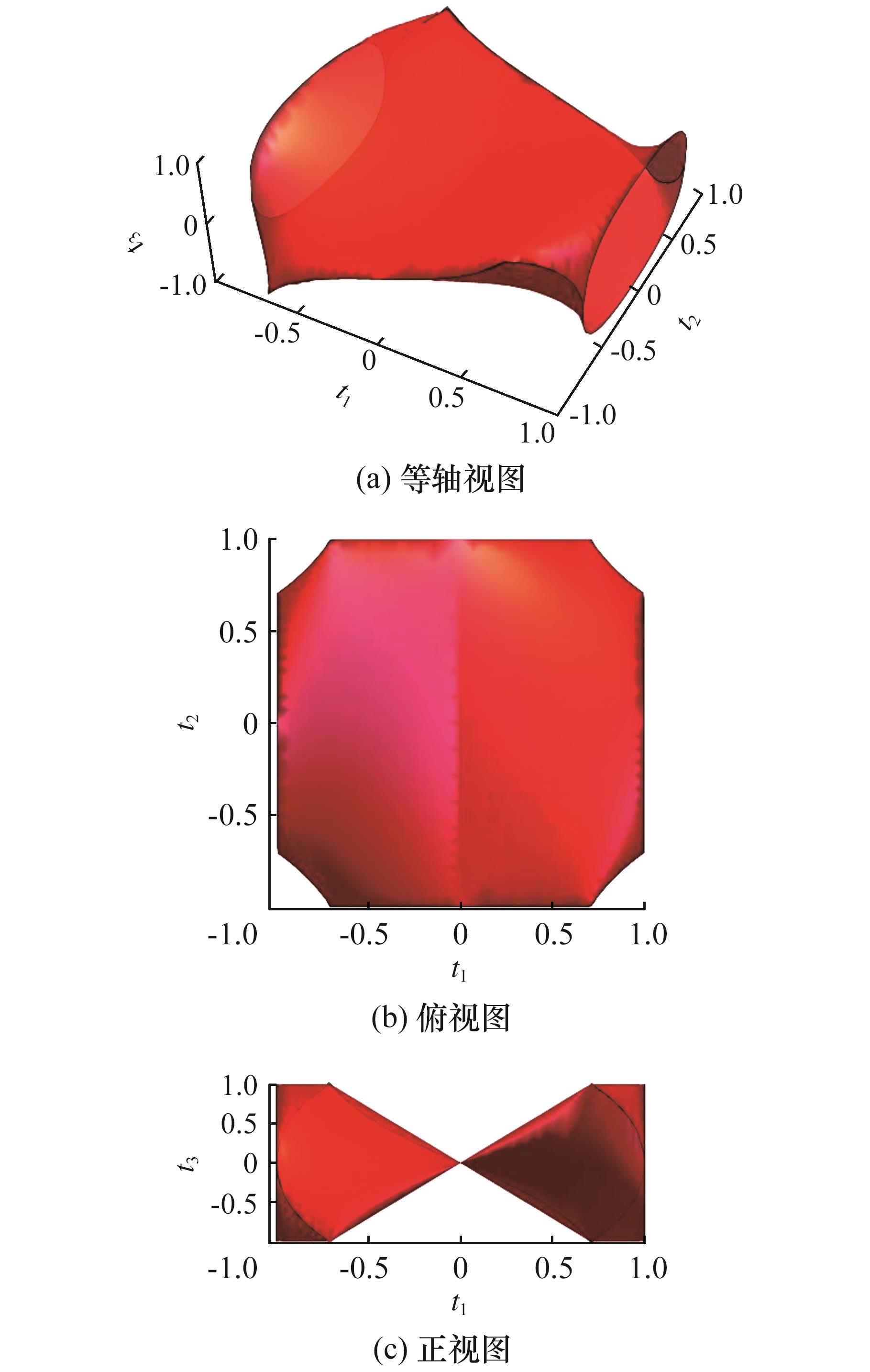
Fig.7 Orientation singular surface
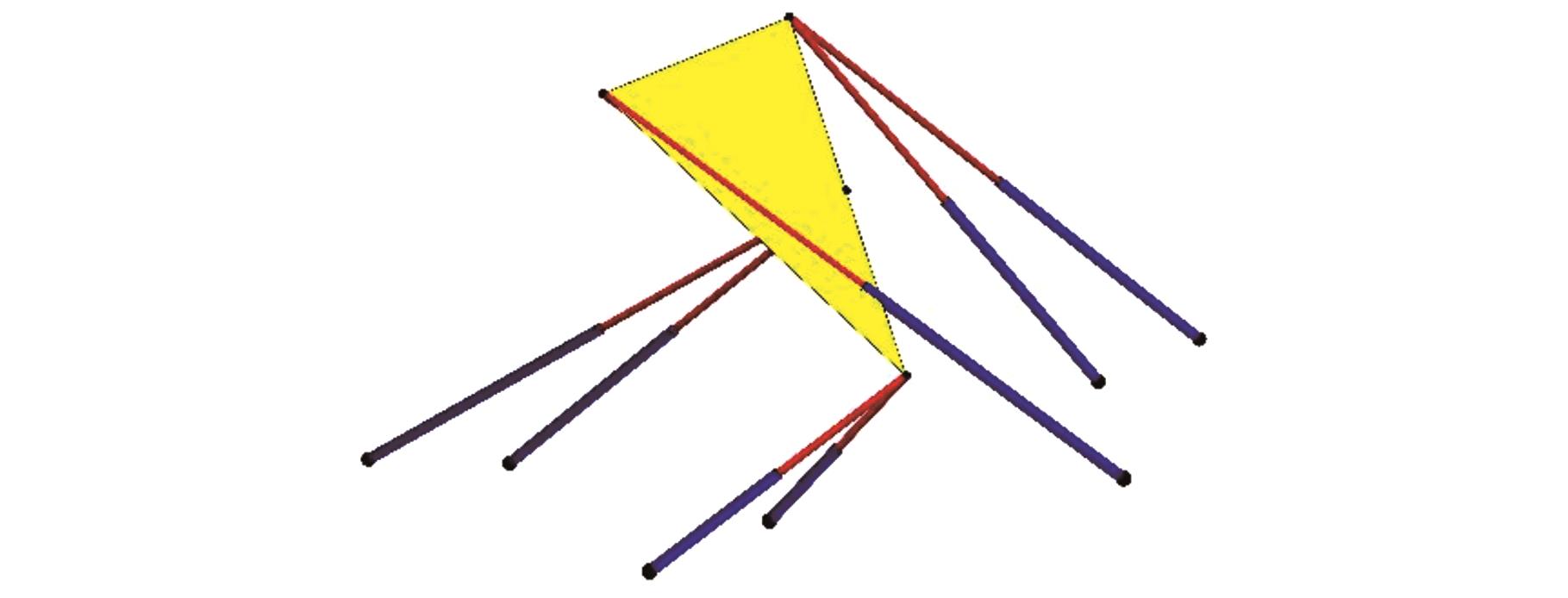
Fig.8 Orientation singular configuration
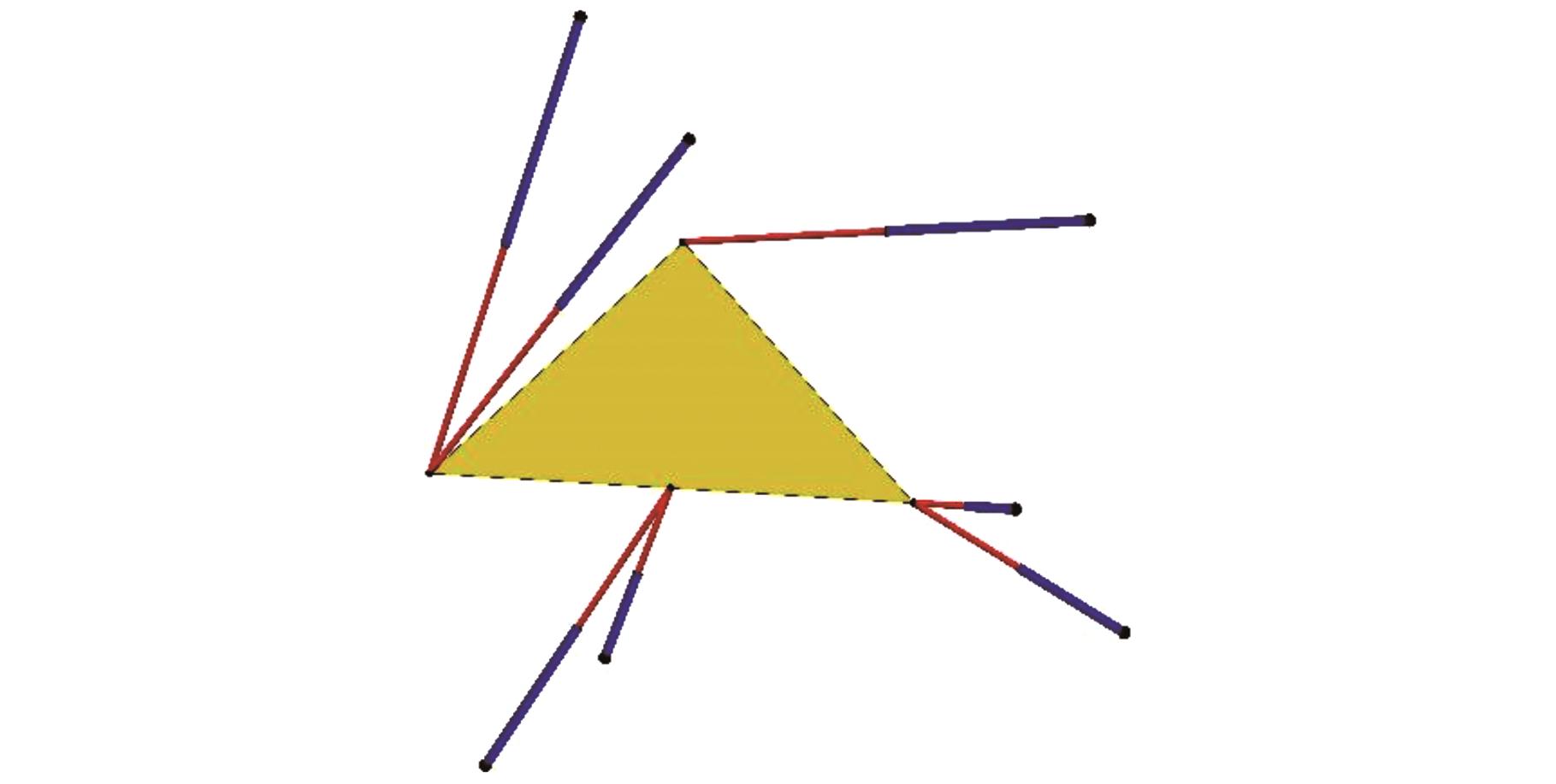
Fig.9 Position singular configuration
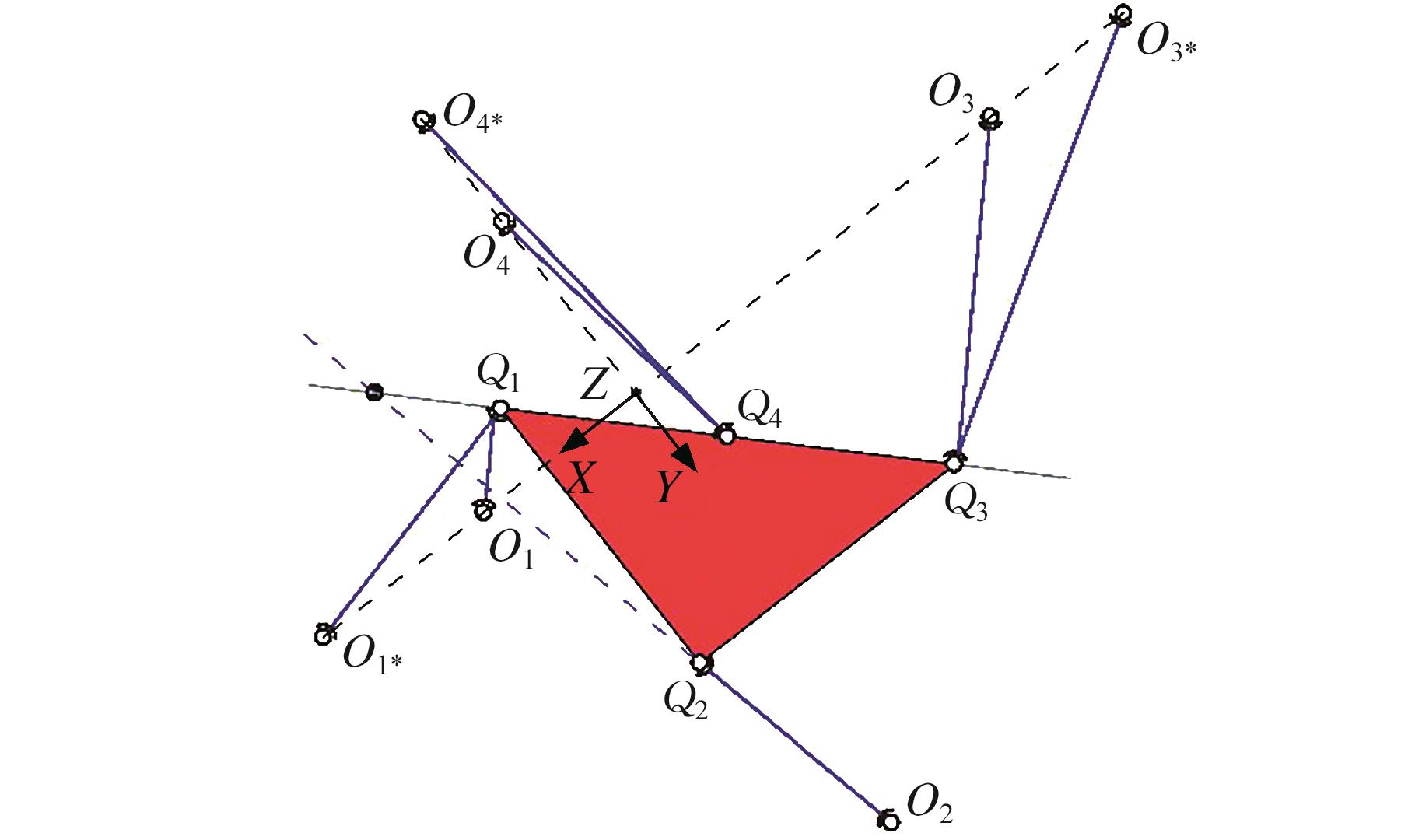
Fig.10 The first Hunt’s singularity
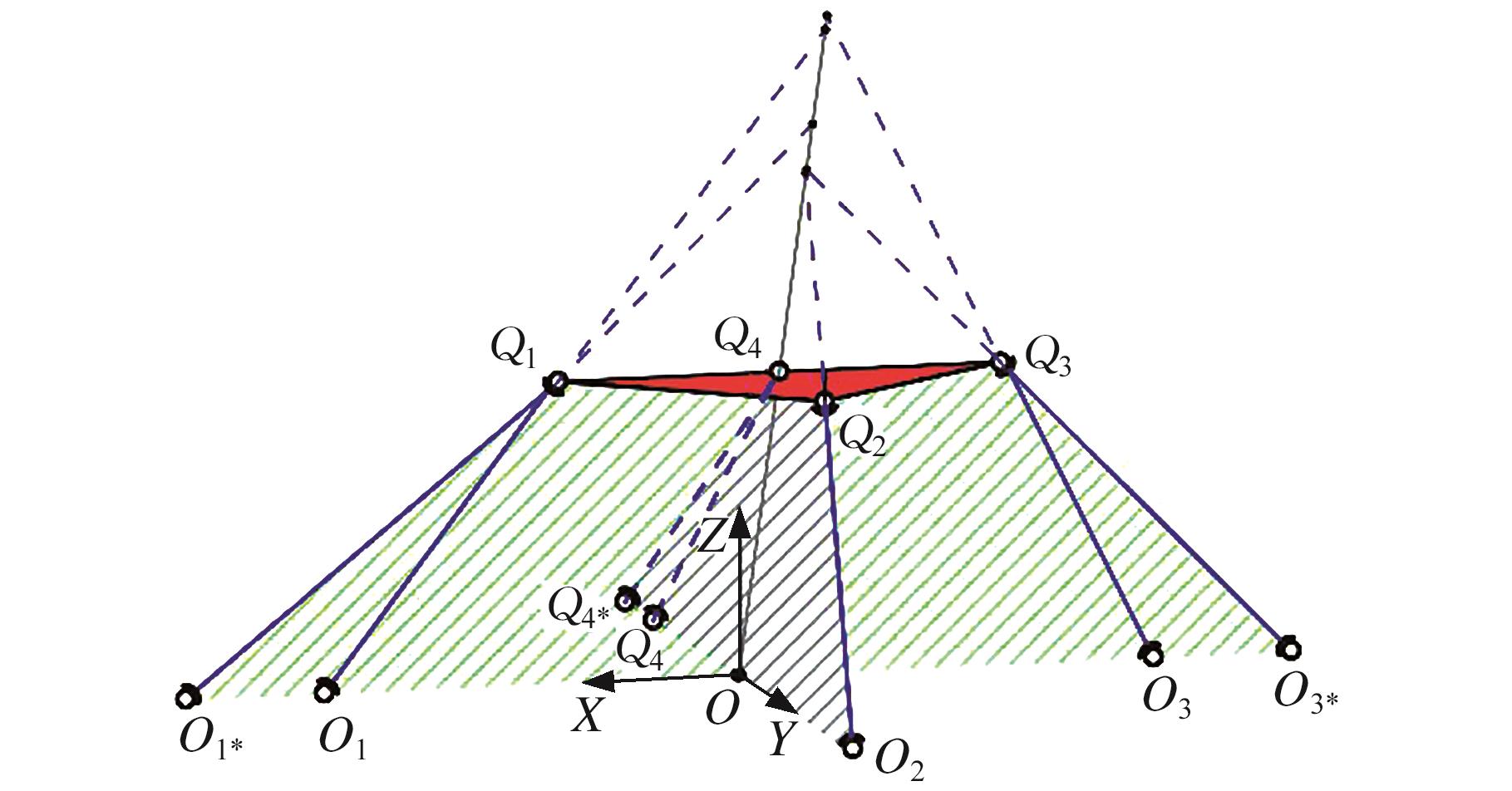
Fig.11 The second Hunt’s singularity
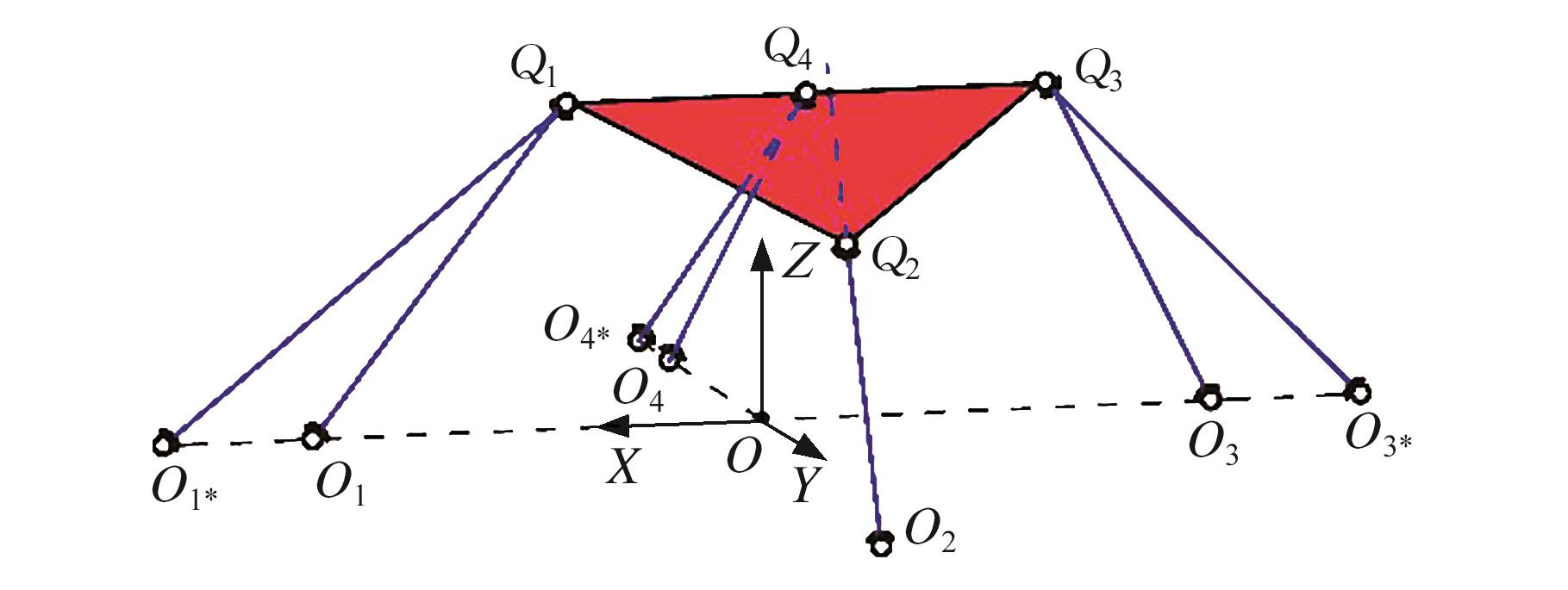
Fig.12 The third Hunt’s singularity
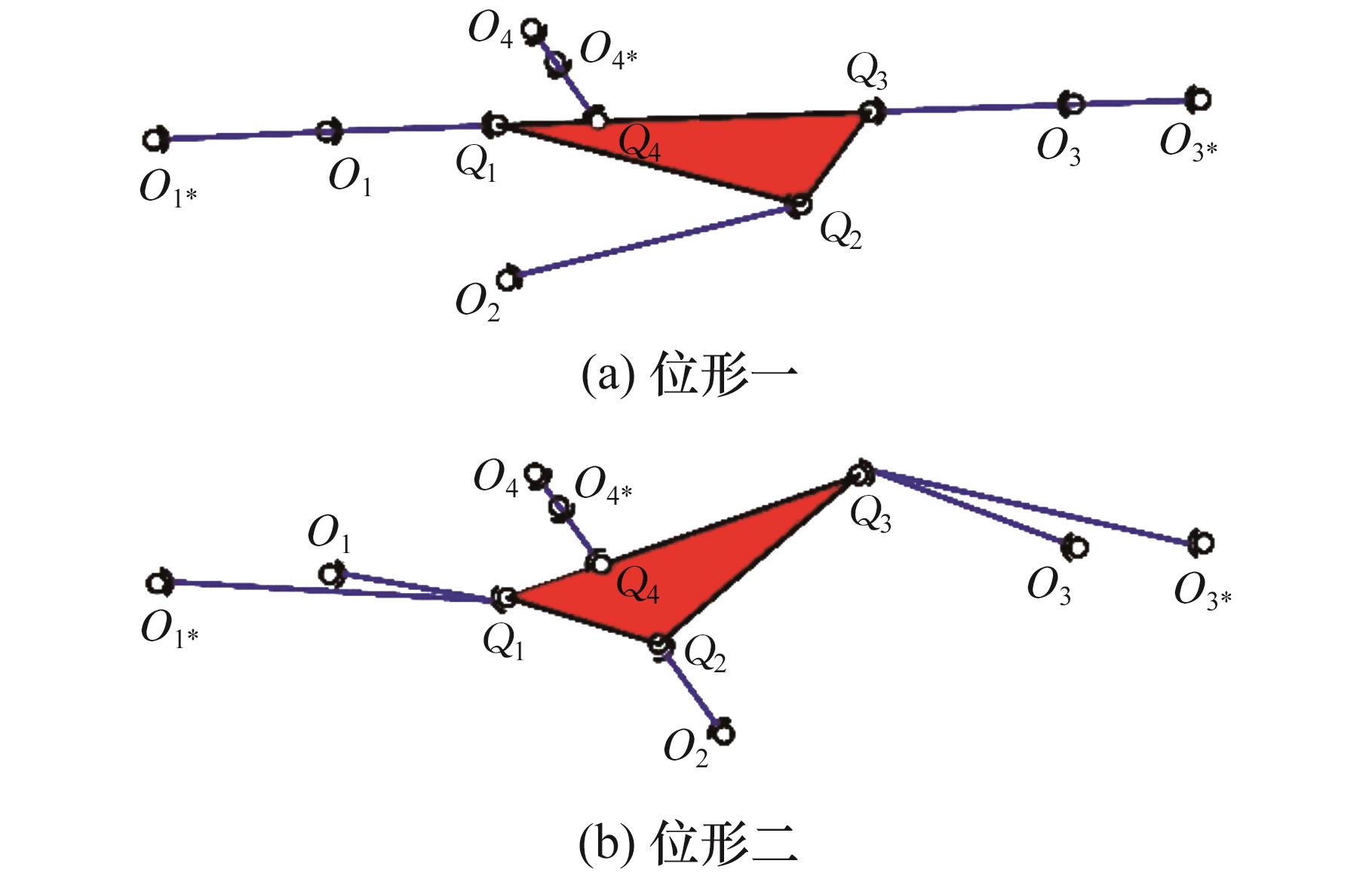
Fig.13 Colinearly actuation singularity
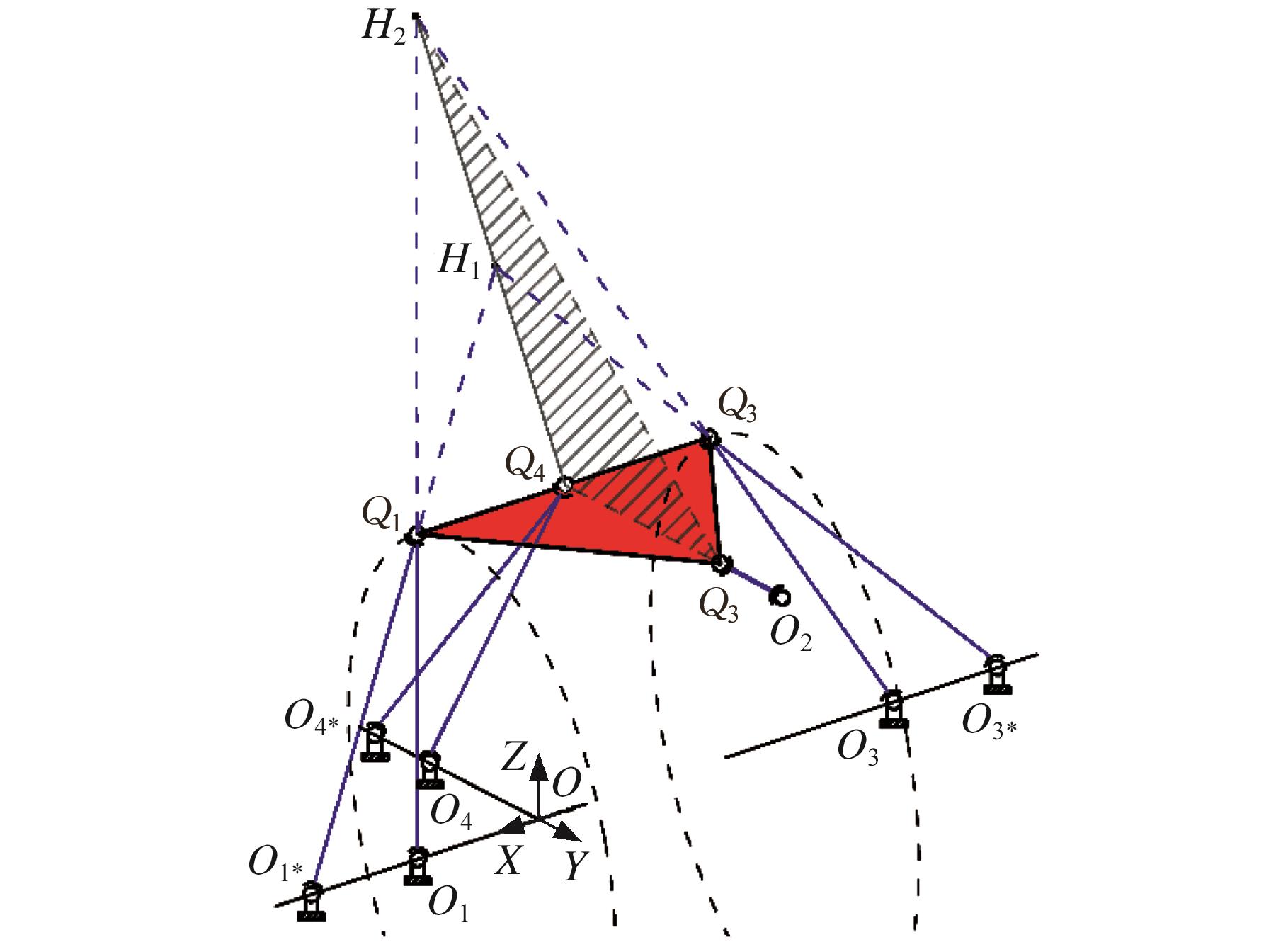
Fig.14 Points Q1、Q3 trajectory of motion
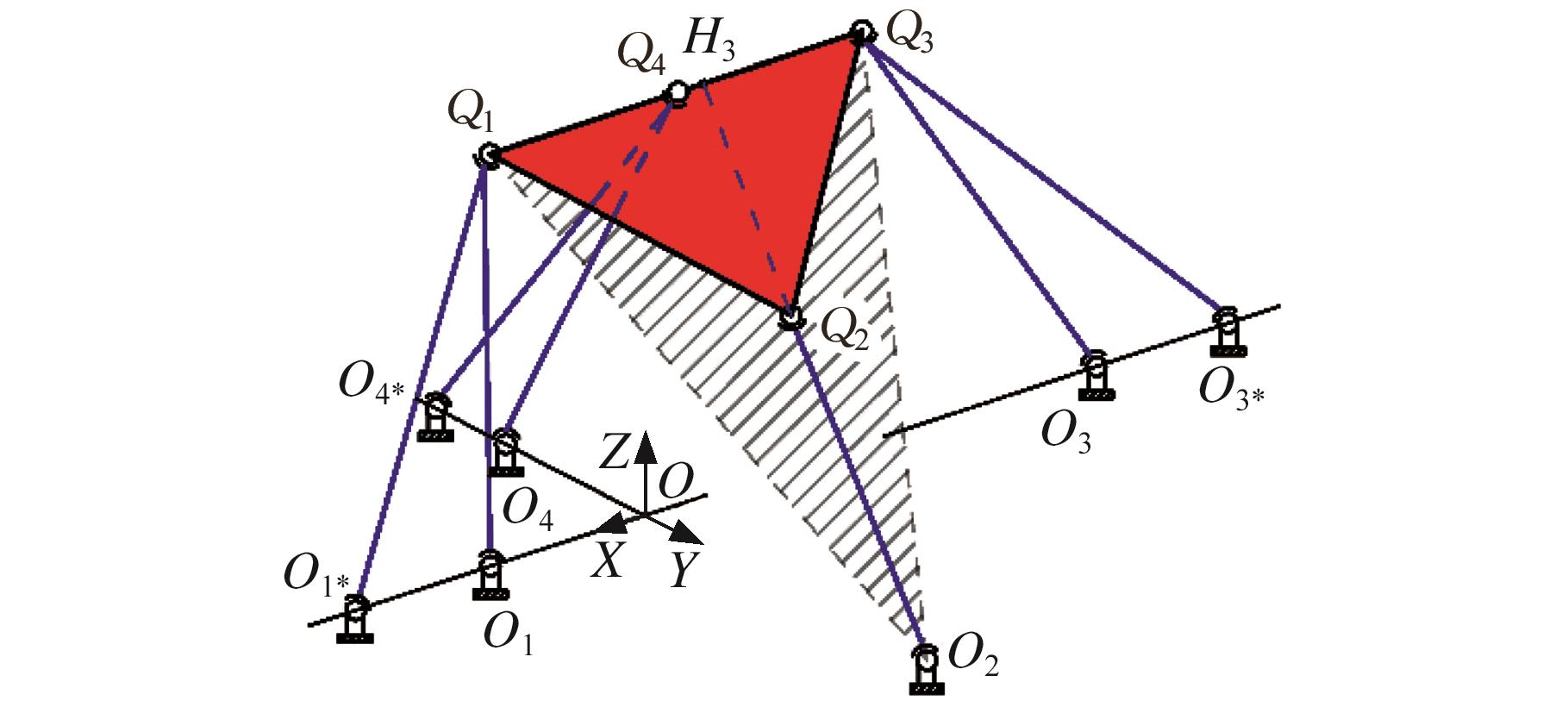
Fig.15 Unique solution at point Q2
| 四组位置正解 | 一组位置正解 | ||
|---|---|---|---|
| 构型 | 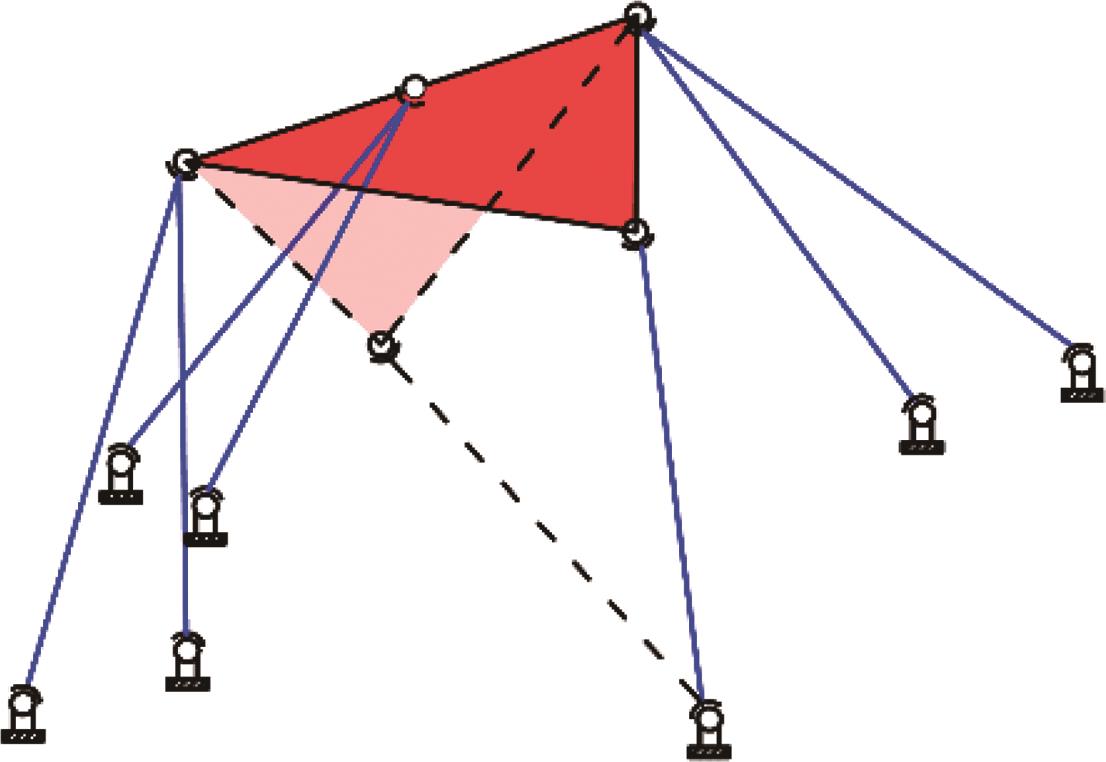 | 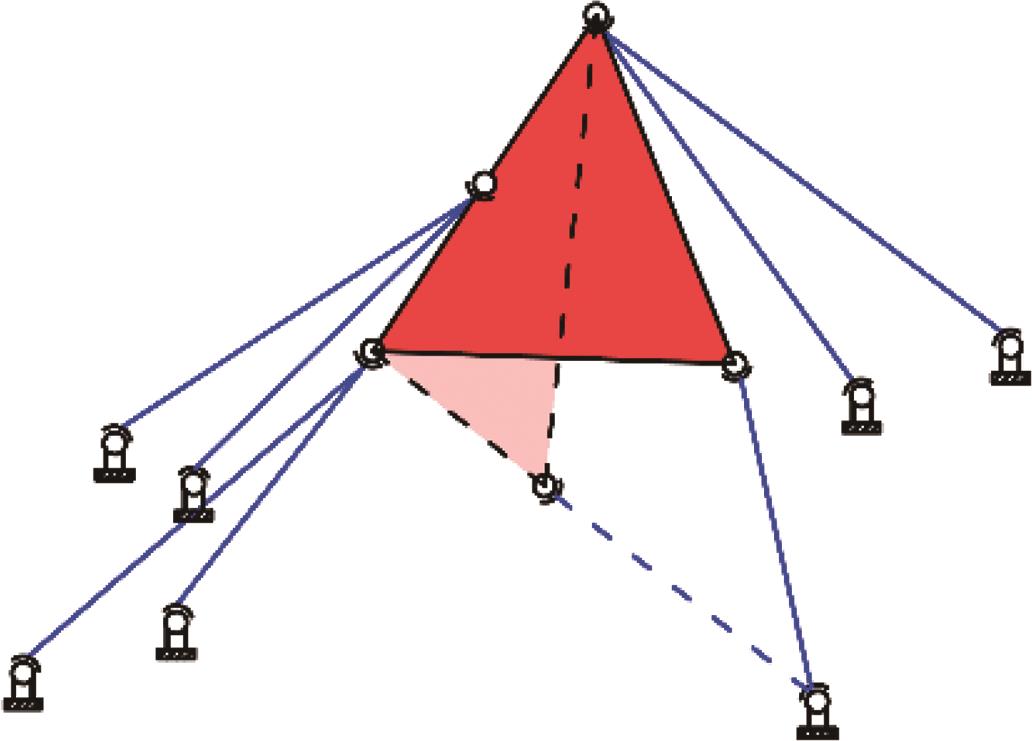 | 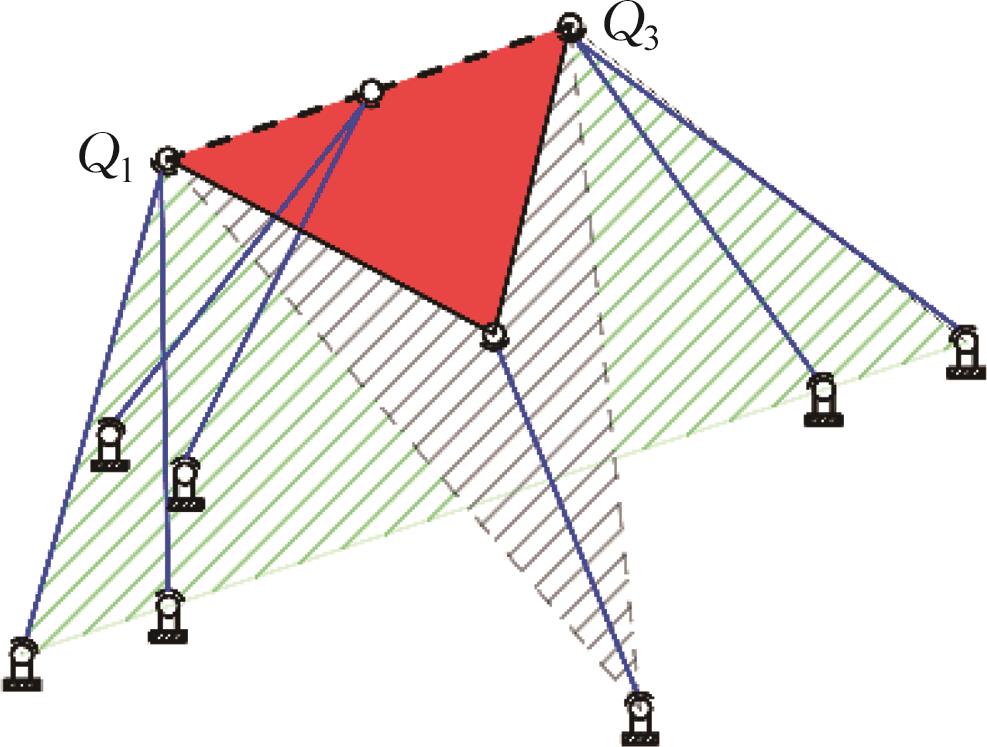 |
| 奇异 | 无奇异位形 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
| 两组位置正解 | |||
| 构型 | 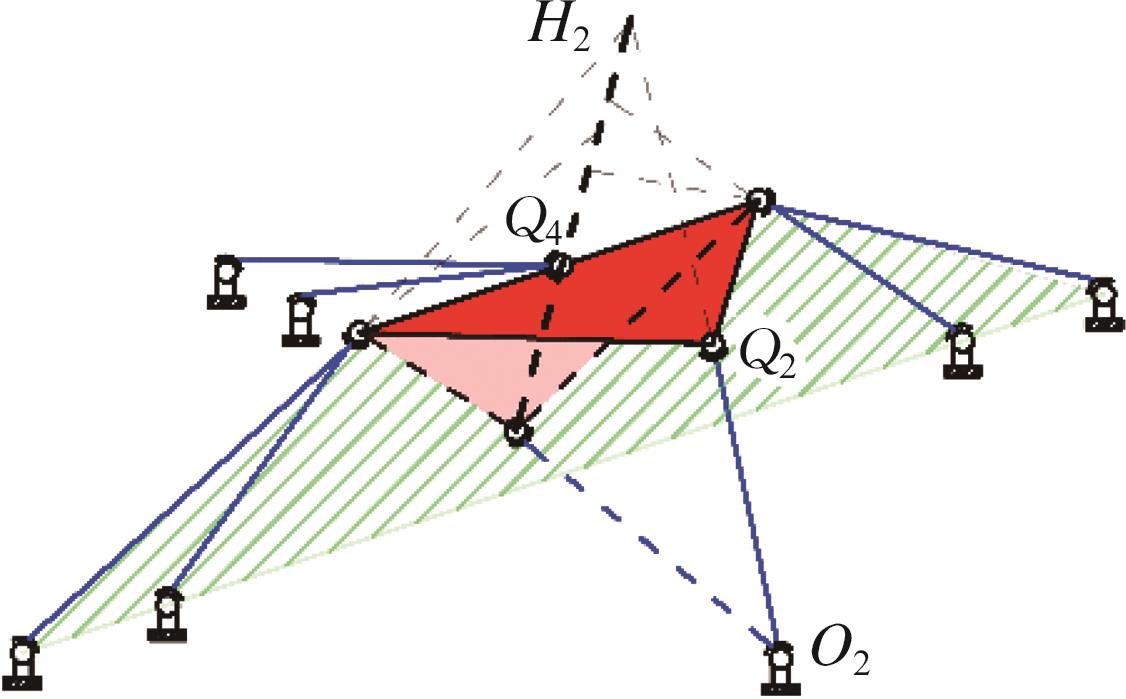 | 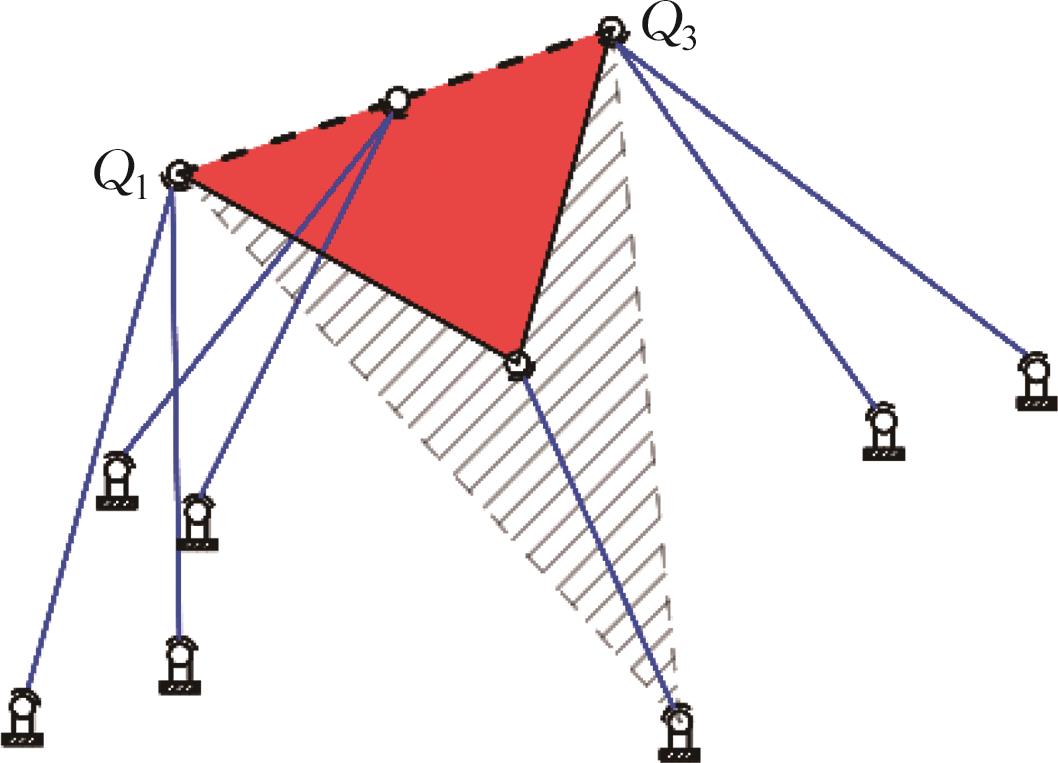 | 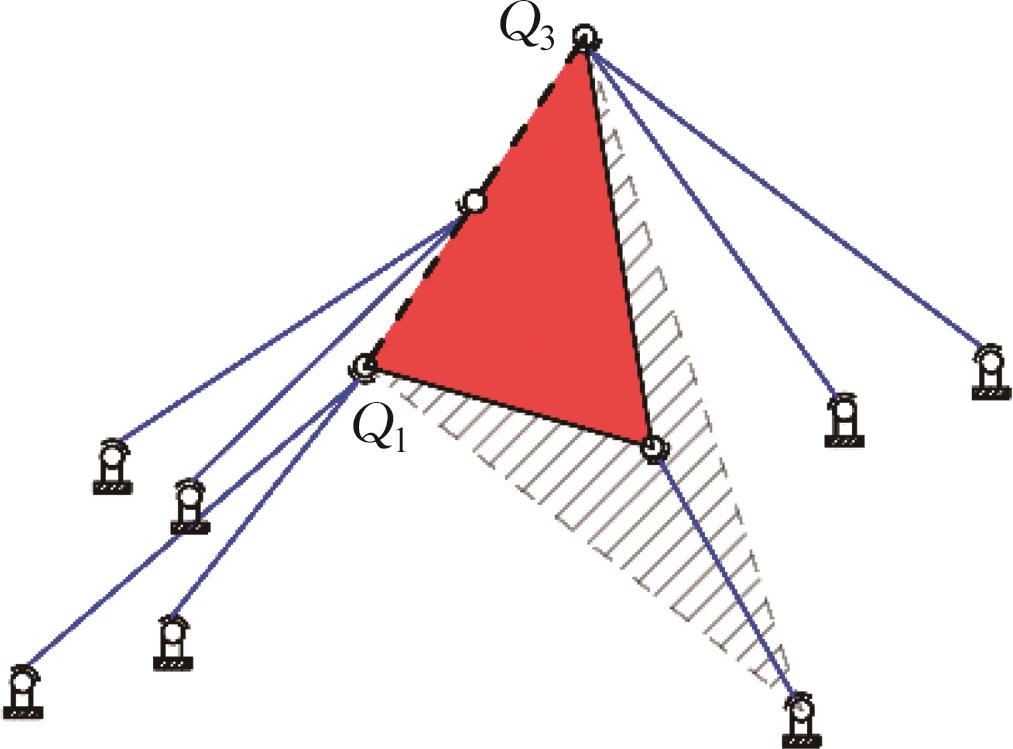 |
| 奇异 | 若O2点位于面H2Q4Q2上,则为Hunt奇异,Q4H2为瞬时旋转轴 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
Tab.6 Relationship between the number of forward position solutions and singularity
| 四组位置正解 | 一组位置正解 | ||
|---|---|---|---|
| 构型 | | | |
| 奇异 | 无奇异位形 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
| 两组位置正解 | |||
| 构型 | | | |
| 奇异 | 若O2点位于面H2Q4Q2上,则为Hunt奇异,Q4H2为瞬时旋转轴 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
| [1] | 谢志江, 程清, 丁军, 等. 双支链六自由度并联机构尺度设计与性能分析[J]. 中国机械工程, 2022, 33(14):1680-1690. |
| XIE Zhijiang, CHENG Qing, DING Jun, et al. Dimensional Design and Performance Analysis of a 6-DOF Parallel Manipulator with Two Limbs[J]. China Mechanical Engineering, 2022, 33(14):1680-1690. | |
| [2] | SABATÉ N, ESQUIVEL J P, SANTANDER J, et al. New Approach for Batch Microfabrication of Silicon-based Micro Fuel Cells[J]. Microsystem Technologies, 2014, 20(2):341-348. |
| [3] | YOU Jingjing, XI Fengfeng, SHEN Huiping, et al. A Novel Stewart-type Parallel Mechanism with Topological Reconfiguration:Design, Kinematics and Stiffness Evaluation[J]. Mechanism and Machine Theory, 2021, 162:104329. |
| [4] | 尤晶晶, 符周舟, 吴洪涛, 等. 12-6台体型Stewart冗余并联机构正向运动学研究[J]. 农业机械学报, 2017, 48(12):395-402. |
| YOU Jingjing, FU Zhouzhou, WU Hongtao, et al. Forward Kinematics of General 12-6 Stewart Redundant Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12):395-402. | |
| [5] | ZHOU Wanyong, CHEN Wuyi, LIU Huadong, et al. A New Forward Kinematic Algorithm for a General Stewart Platform[J]. Mechanism and Machine Theory, 2015, 87:177-190. |
| [6] | YANG Xiaolong, WU Hongtao, LI Yao, et al. A Dual Quaternion Solution to the Forward Kinematics of a Class of Six-DOF Parallel Robots with Full or Reductant Actuation[J]. Mechanism and Machine Theory, 2017, 107:27-36. |
| [7] | 沈惠平, 仲锐, 李菊, 等. 运动副分布顺序对并联机构运动学与动力学性能的影响[J]. 农业机械学报, 2023, 54(7):412-426. |
| SHEN Huiping, ZHONG Rui, LI Ju, et al. Influence of Different Distribution Order of Joints on Kinematic and Dynamic Performance of Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(7):412-426. | |
| [8] | ZHAO Fuqun, GUO Sheng, ZHANG Chengyu, et al. Singularity Analysis and Dexterity Performance on a Novel Parallel Mechanism with Kinematic Redundancy[J]. International Journal of Advanced Robotic Systems, 2019, 16(5):1729881419872641. |
| [9] | LACOMBE J, GOSSELIN C. Singularity Analysis of a Kinematically Redundant (6+2)-DOF Parallel Mechanism for General Configurations[J]. Mechanism and Machine Theory, 2022, 176:105015. |
| [10] | MONSARRAT B, GOSSELIN C M. Singularity Analysis of a Three-leg Six-degree-of-freedom Parallel Platform Mechanism Based on Grassmann Line Geometry[J]. The International Journal of Robotics Research, 2001, 20(4):312-328. |
| [11] | CHENG Shili, JI Ping. Geometric Algebra Approach to Analyzing the Singularity of Six-DOF Parallel Mechanism[J]. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2019, 13(4):JAMDSM0076. |
| [12] | YANG Tingli, LIU Anxin, SHEN Huiping, et al. On the Correctness and Strictness of the Position and Orientation Characteristic Equation for Topological Structure Design of Robot Mechanisms[J]. Journal of Mechanisms and Robotics, 2013, 5(2):021009. |
| [13] | 沈惠平, 朱小蓉, 尹洪波, 等. 并联机构的结构降耦原理及其设计方法[J]. 机械工程学报, 2016, 52(23):102-113. |
| SHEN Huiping, ZHU Xiaorong, YIN Hongbo, et al. Principle and Design Method for Structure Coupling-reducing of Parallel Mechanisms[J]. Journal of Mechanical Engineering, 2016, 52(23):102-113. | |
| [14] | MA O, ANGELES J. Architecture Singularities of Platform Manipulators[C]∥Proceedings of 1991 IEEE International Conference on Robotics and Automation. Sacramento, 1991:1542-1547. |
| [15] | HUNT K H. Structural Kinematics of In-parallel-Actuated Robot-arms[J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1983, 105(4):705-712. |
| [16] | FICHTER E F. A Stewart-platform Based Manipulator:General Theory and Practical Construction[J]. International Journal of Robotics Research, 1986, 5(2):157-182. |
| [1] |
LI Meng-Lei, GU Yo-Qin, ZHANG Hua-Liang, LIU Li-Qin, DU Juan, WEN Chu-Hua, LAN Guo-Sheng.
Parallel Mechanism Structure Optimization Design Based on Multi-objective Differential Evolution Algorithm
[J]. J4, 201016, 21(16): 1915-1920.
|
| [2] |
LU Kai-Jiang, SHI Dun-Beng, ZHANG Feng-Chao.
Dynamics Optimization Design of Planar 3-DOF Parallel Mechanism
[J]. J4, 201016, 21(16): 1926-1931.
|
| [3] | Ju LI, Yue GUO, Huiping SHEN, Qinmei MENG, Xiaoyang GU. Optimization Principle and General Method for Multiple Topology Decoupling of Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(8): 1700-1712. |
| [4] | Xingyu ZHAO, Tieshi ZHAO, Bo XU, Xiangquan LIU, Yufei QIN. Kinematics and Transmission Performance Analyses of Parallel Hybrid Drive Mechanisms [J]. China Mechanical Engineering, 2025, 36(8): 1728-1739. |
| [5] | PU Zhixin, GUO Jianwei, PAN Yuqi, BAI Yangxi. Performance Analysis and Optimization Design of 2PPaPaR Parallel Mechanism [J]. China Mechanical Engineering, 2023, 34(19): 2304-2312. |
| [6] | SHEN Huiping, LI XiaLI Ju, LI Tao, MENG Qingmei, WU Guanglei. Effect of Constrained or Unconstrained Branches on Kinematics and Stiffness Performance of PMs —Design,Analysis and Optimization of Two Novel Three-translation PMs with Partial Motion Decoupling Being Examples#br# [J]. China Mechanical Engineering, 2023, 34(13): 1533-1549. |
| [7] | DU Zhongqiu, SHEN Huiping, MENG Qingmei, LI Tao, YANG Tingli. Design and Performance Analysis of 8R Two-translational Spatial Parallel Mechanism with Motion Decoupling and Symbolic Positive Solutions [J]. China Mechanical Engineering, 2023, 34(12): 1425-1435. |
| [8] | CHEN Hengtong, WANG Xiaoguang, JIANG Hailong, LIN Qi. Analysis and Comparison of Kinematic Characteristics for Two Typical 6-DOF Suspension Mechanisms at High Angles of Attack [J]. China Mechanical Engineering, 2023, 34(06): 641-649. |
| [9] | LIAO Cancan, ZHANG Yuanyuan, MO Han. Optimal Design of Tracking Mechanisms for a New Type Dish Solar ConcentratorLIU Fanmao [J]. China Mechanical Engineering, 2023, 34(04): 395-403. |
| [10] | DONG Chenglin, CAI Longqi, LI Yi, LU Tong, ZHANG Luke. Isotropy Design and Vibration Reduction of a Three-dimensional Dynamics Vibration Absorber Based on Parallel Mechanisms [J]. China Mechanical Engineering, 2023, 34(03): 307-313. |
| [11] | WANG Manxin, LI Lanbin, LI Zhengliang, LIU Haitao, HUANG Tian. Topological Structure Synthesis and Optimization of 1T2R Parallel Mechanisms [J]. China Mechanical Engineering, 2022, 33(20): 2395-2402. |
| [12] | WANG Yixi, SHEN Huiping, CHEN Pu, WU Guanglei. Three-level Orderly Proceeding Optimization Design and Its Applications for Parallel Mechanisms Based on Kinematics,Stiffness and Dynamics [J]. China Mechanical Engineering, 2022, 33(13): 1560-1575,1621. |
| [13] | ZHU Yaguang, ZHU Jianwei, LI Ruyue, SONG Zhipeng. Neuromuscular Architecture Based Compliance Control of Bionic Parallel Torsos [J]. China Mechanical Engineering, 2022, 33(13): 1576-1585,1637. |
| [14] | ZHANG Yanbin, WANG Keming, LU Fenglin, WEI Xuemin, WANG Kefeng. Type Synthesis of Uncoupled Two-rotational Parallel Mechanism with One Pure Constraint Branch [J]. China Mechanical Engineering, 2022, 33(01): 54-61. |
| [15] | ZHANG Ying, SUN Hao, MA Shuaishuai. Design of a Kind of Multi-dimensional Attitude Adjustment and Vibration Isolation Platform Based on 4-UPS/CPC Parallel Mechanisms#br# [J]. China Mechanical Engineering, 2021, 32(13): 1513-1522,1529. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||