

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (8): 1728-1739.DOI: 10.3969/j.issn.1004-132X.2025.08.008
Previous Articles Next Articles
Xingyu ZHAO1( ), Tieshi ZHAO2,3, Bo XU1, Xiangquan LIU1, Yufei QIN1
), Tieshi ZHAO2,3, Bo XU1, Xiangquan LIU1, Yufei QIN1
Received:2024-09-05
Online:2025-08-25
Published:2025-09-18
赵星宇1(), 赵铁石2,3, 许博1, 刘相权1, 秦宇飞1
作者简介:赵星宇*,男,1991年生,讲师。研究方向为并联机器人理论及其应用。E-mail: zhaoxy@bistu.edu.cn。
基金资助:CLC Number:
Xingyu ZHAO, Tieshi ZHAO, Bo XU, Xiangquan LIU, Yufei QIN. Kinematics and Transmission Performance Analyses of Parallel Hybrid Drive Mechanisms[J]. China Mechanical Engineering, 2025, 36(8): 1728-1739.
赵星宇, 赵铁石, 许博, 刘相权, 秦宇飞. 并联式混合驱动机构运动学和传递性能分析[J]. 中国机械工程, 2025, 36(8): 1728-1739.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.08.008
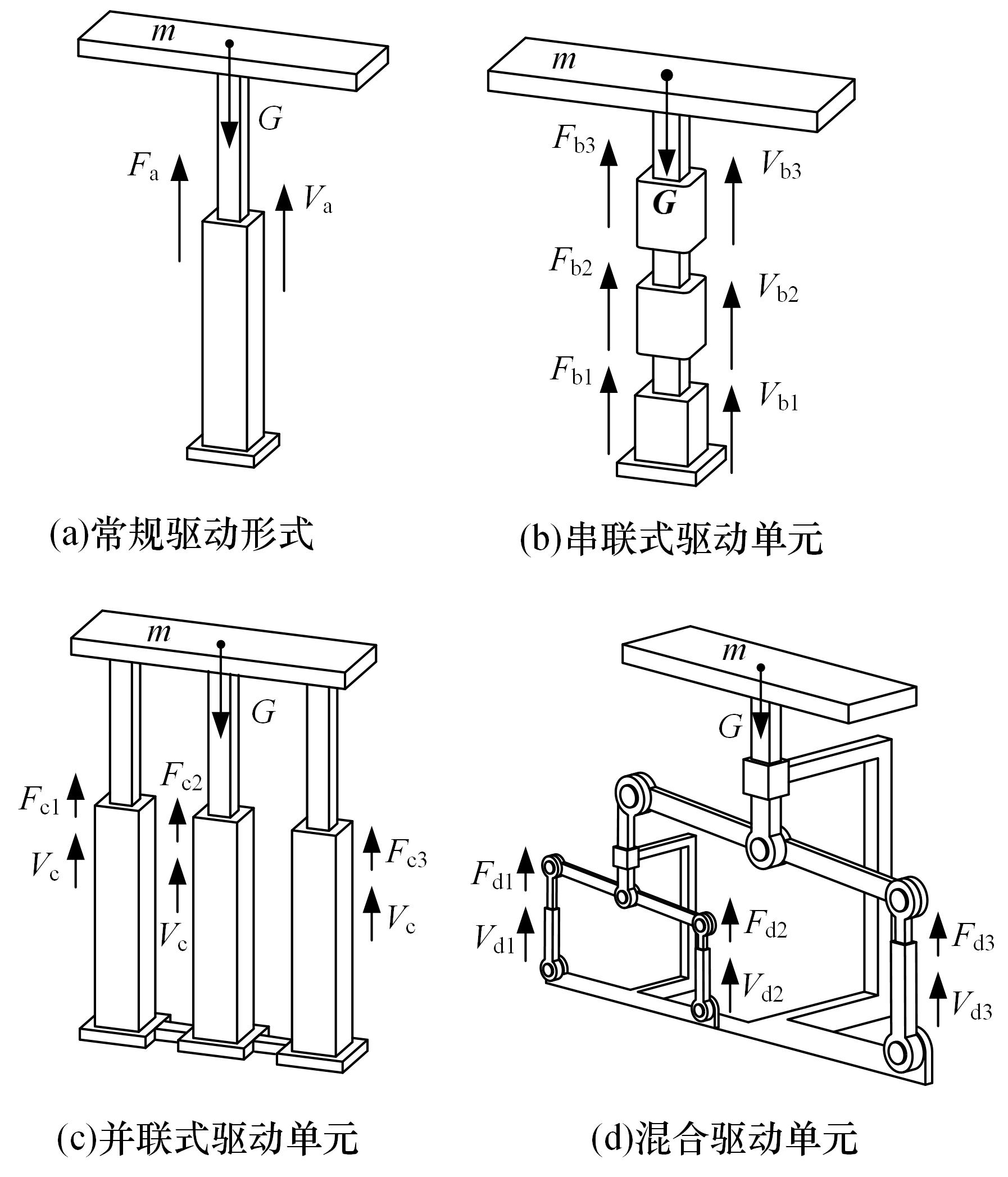
Fig.1 Four driving types
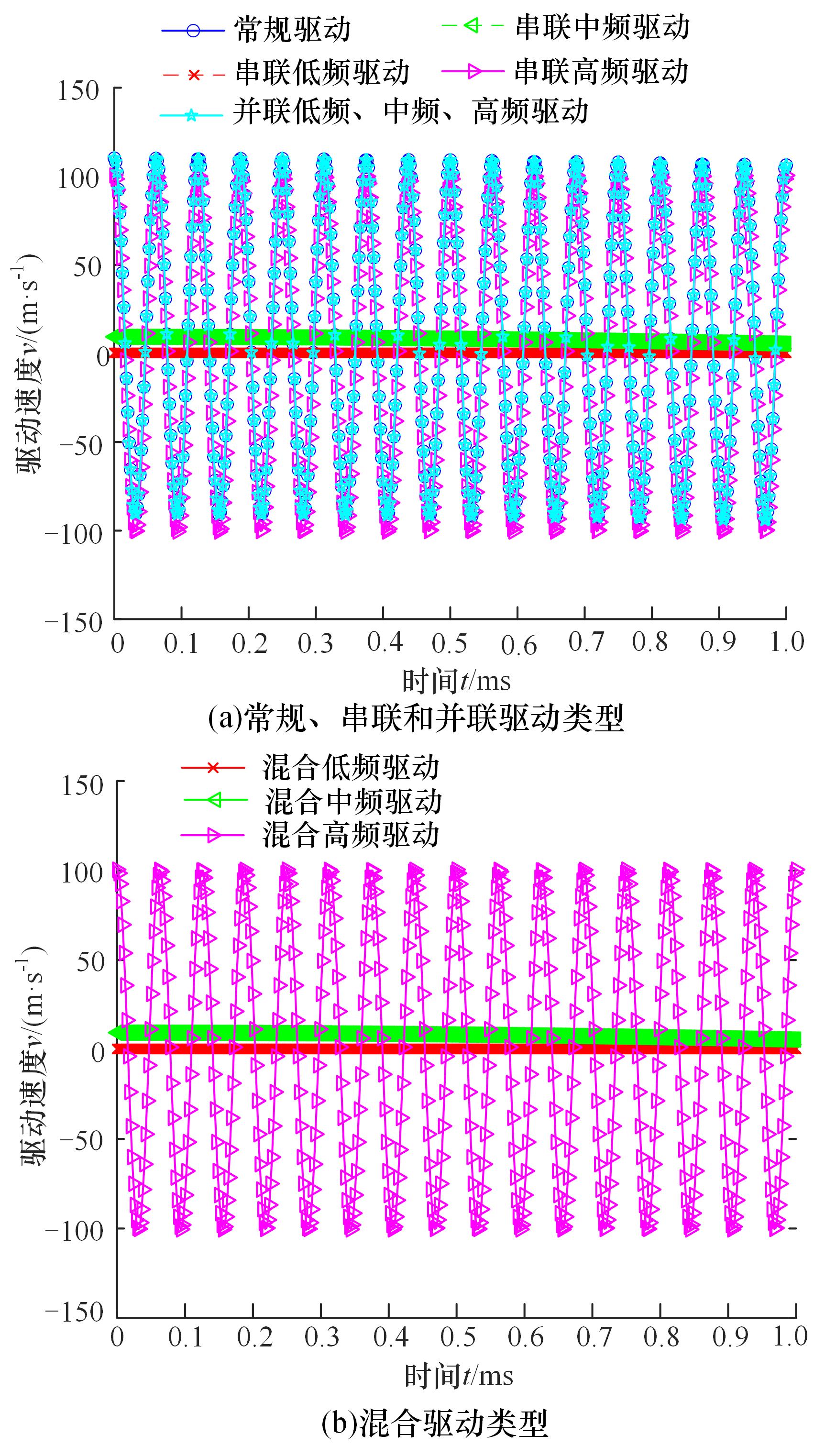
Fig.2 Comparison of driving velocity of different driving types
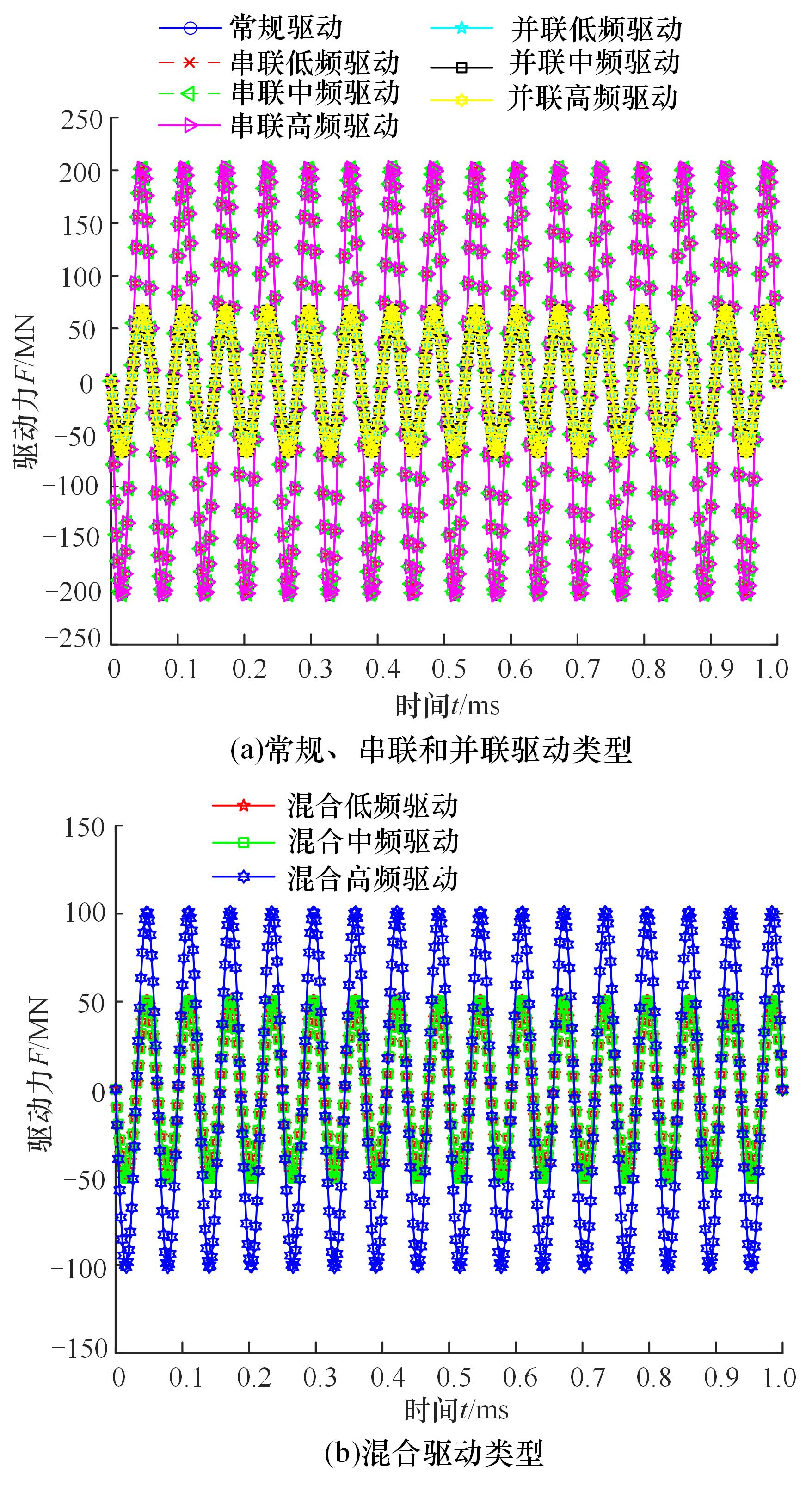
Fig.3 Comparison of driving force of different driving types
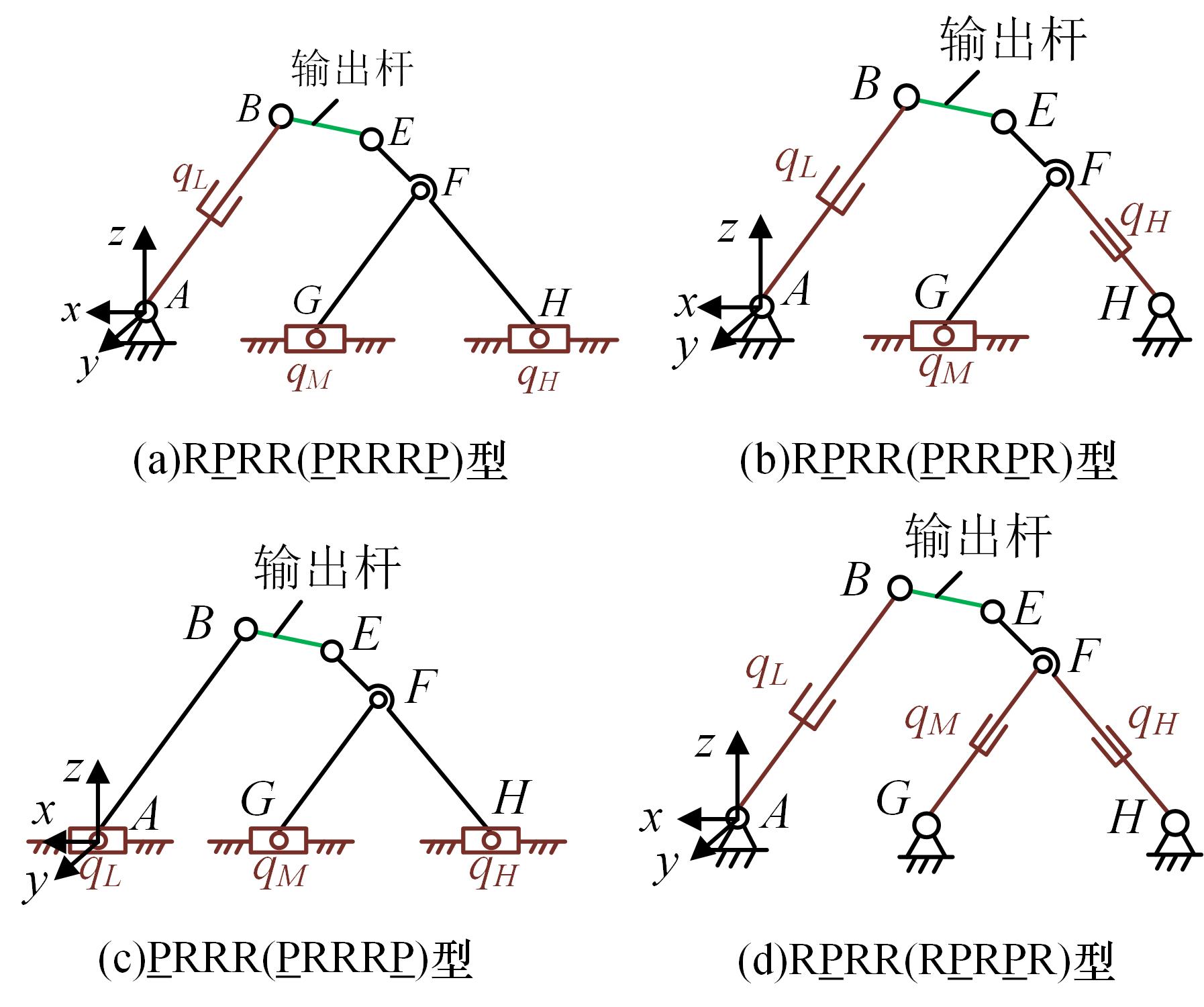
Fig.4 High-medium-low frequency hybrid driving unit
| 混合驱动单元构型 | 承载性能 | 所占空间 |
|---|---|---|
| R | 较好 | 较小 |
| R | 较差 | 较小 |
| 好 | 大 | |
| R | 差 | 小 |
Tab.1 Configuration selection
| 混合驱动单元构型 | 承载性能 | 所占空间 |
|---|---|---|
| R | 较好 | 较小 |
| R | 较差 | 较小 |
| 好 | 大 | |
| R | 差 | 小 |
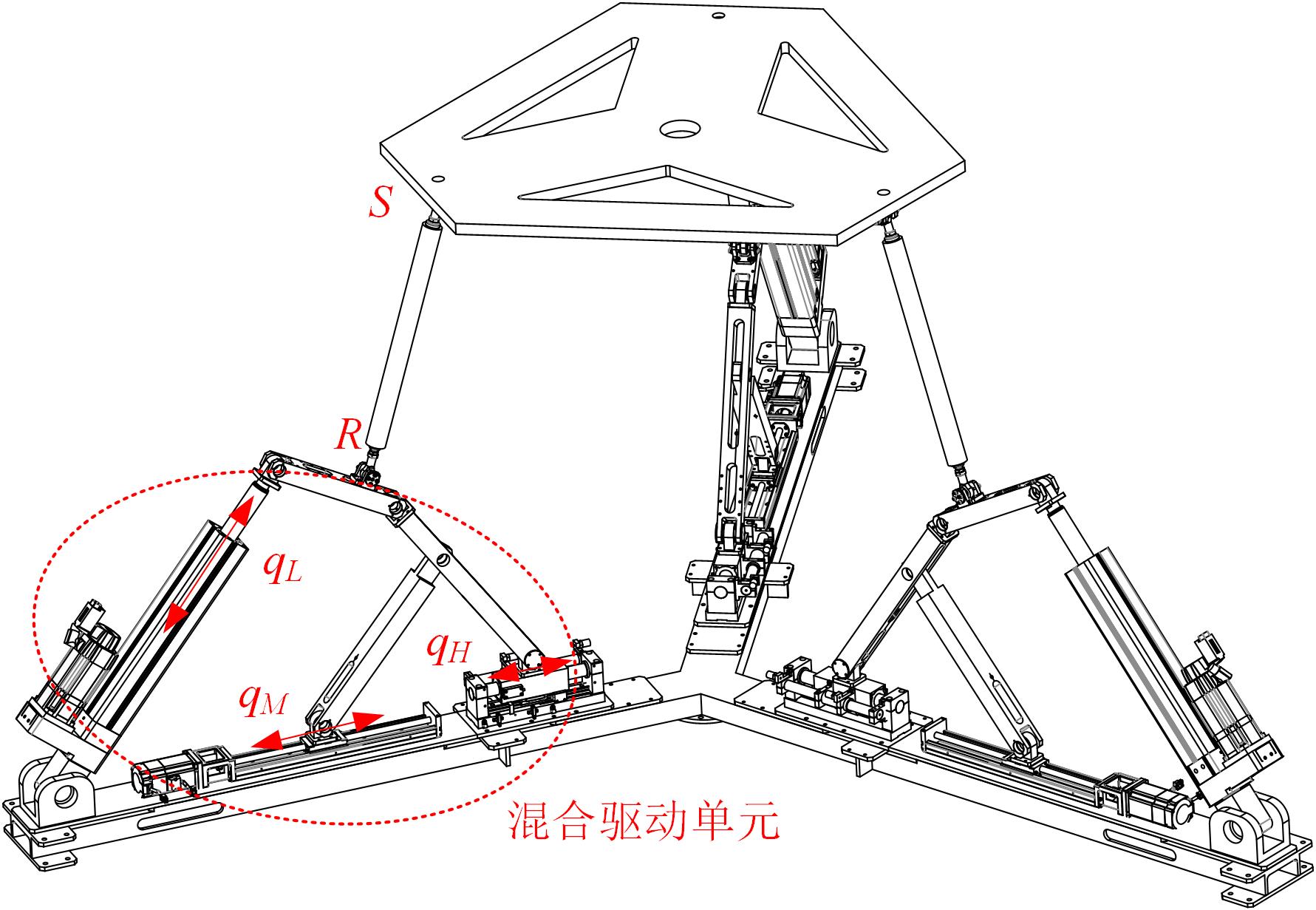
Fig.5 3-RPRR(PRRRP)RS parallel hybrid drive mechanism
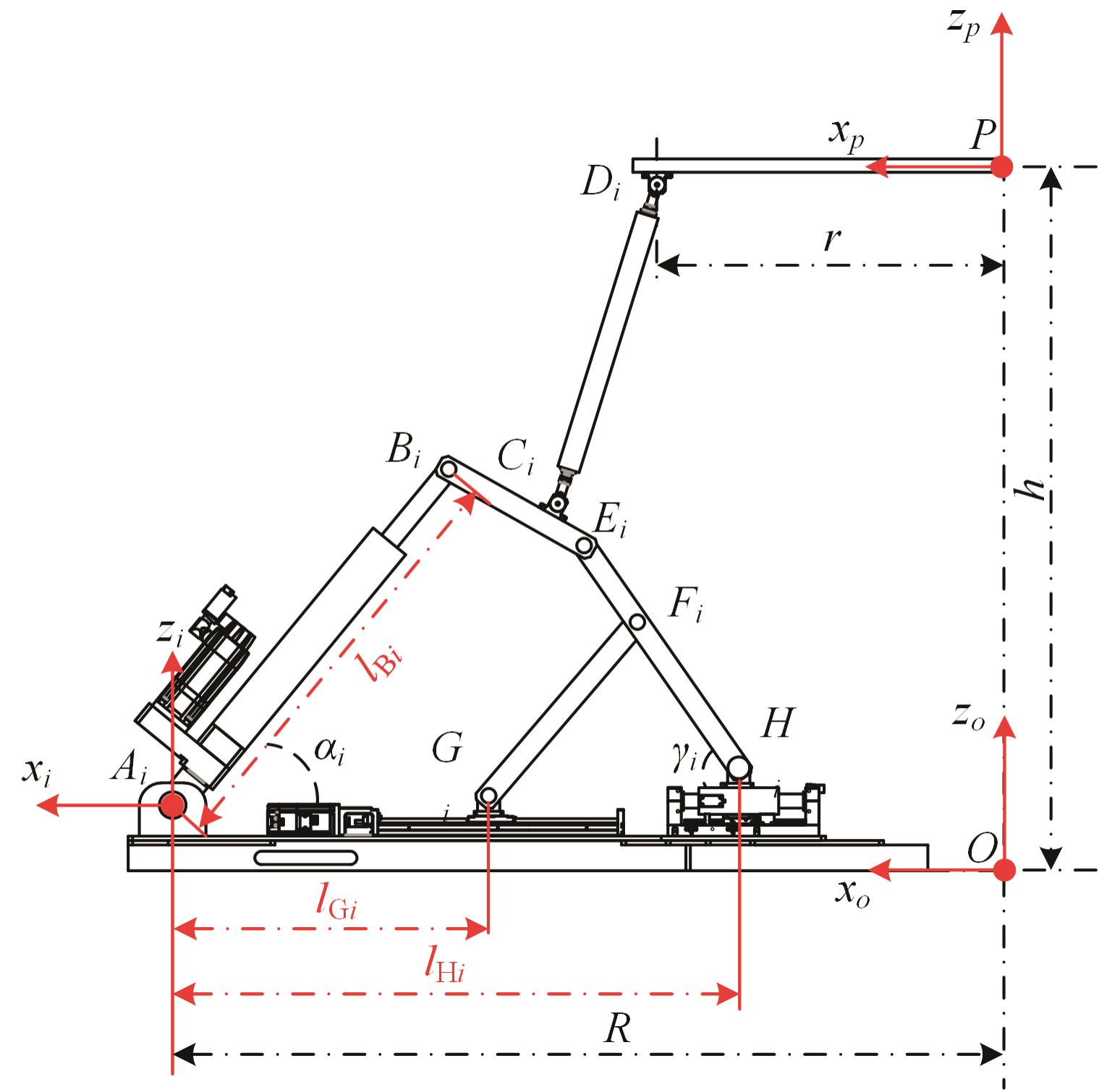
Fig.6 Structure diagram of branch i
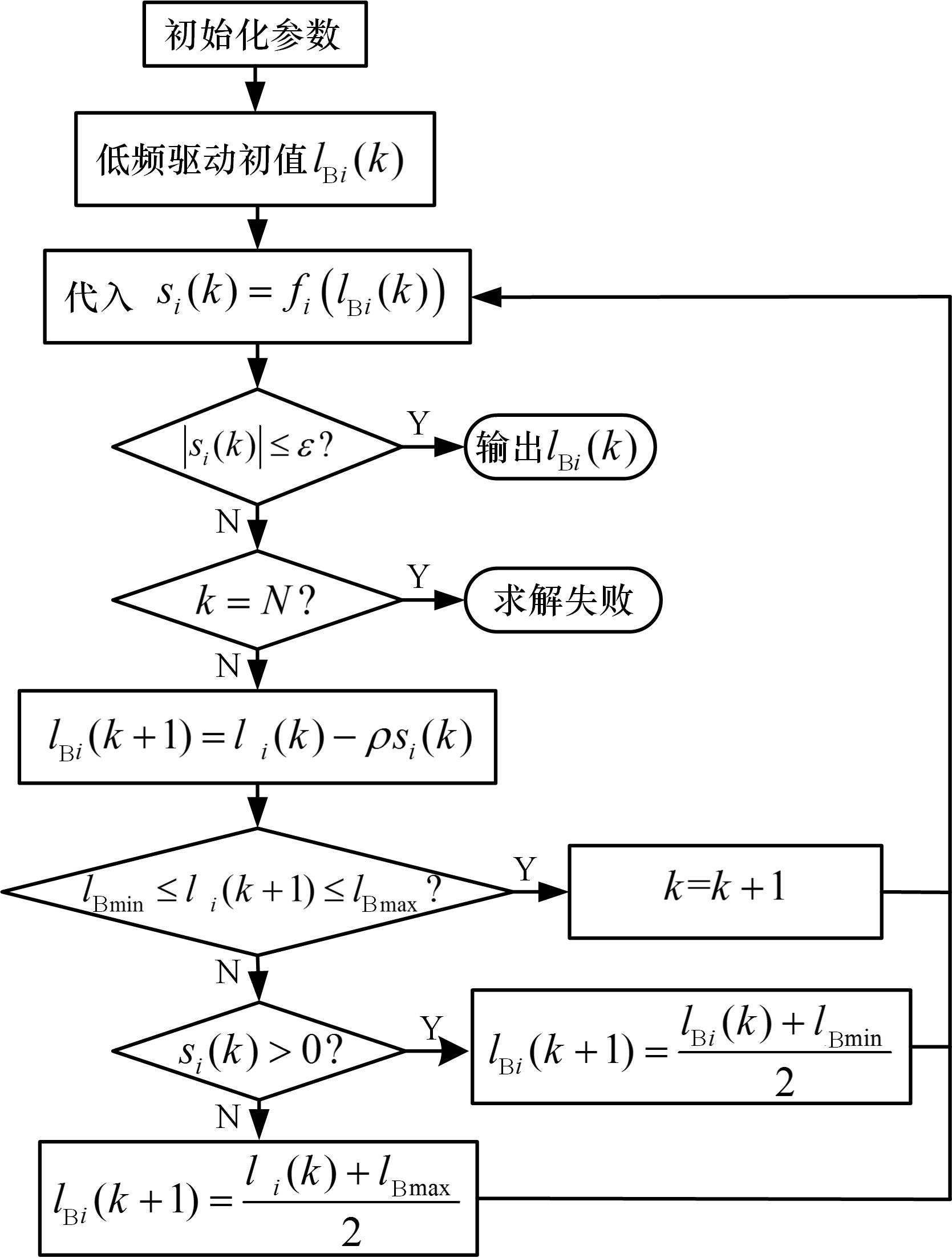
Fig.7 Flow chart of iterative method
| 参数 | 数值 |
|---|---|
| R | 1700 |
| r | 650 |
| h | 1400 |
| lCD | 750 |
| lBC | 250 |
| lCE | 100 |
| lEH | 600 |
| lFH | 400 |
| lGF | 515 |
| 1275 | |
| 710 | |
| 1000 | |
| 20 | |
| 80 |
Tab.2 The structure parameters
| 参数 | 数值 |
|---|---|
| R | 1700 |
| r | 650 |
| h | 1400 |
| lCD | 750 |
| lBC | 250 |
| lCE | 100 |
| lEH | 600 |
| lFH | 400 |
| lGF | 515 |
| 1275 | |
| 710 | |
| 1000 | |
| 20 | |
| 80 |
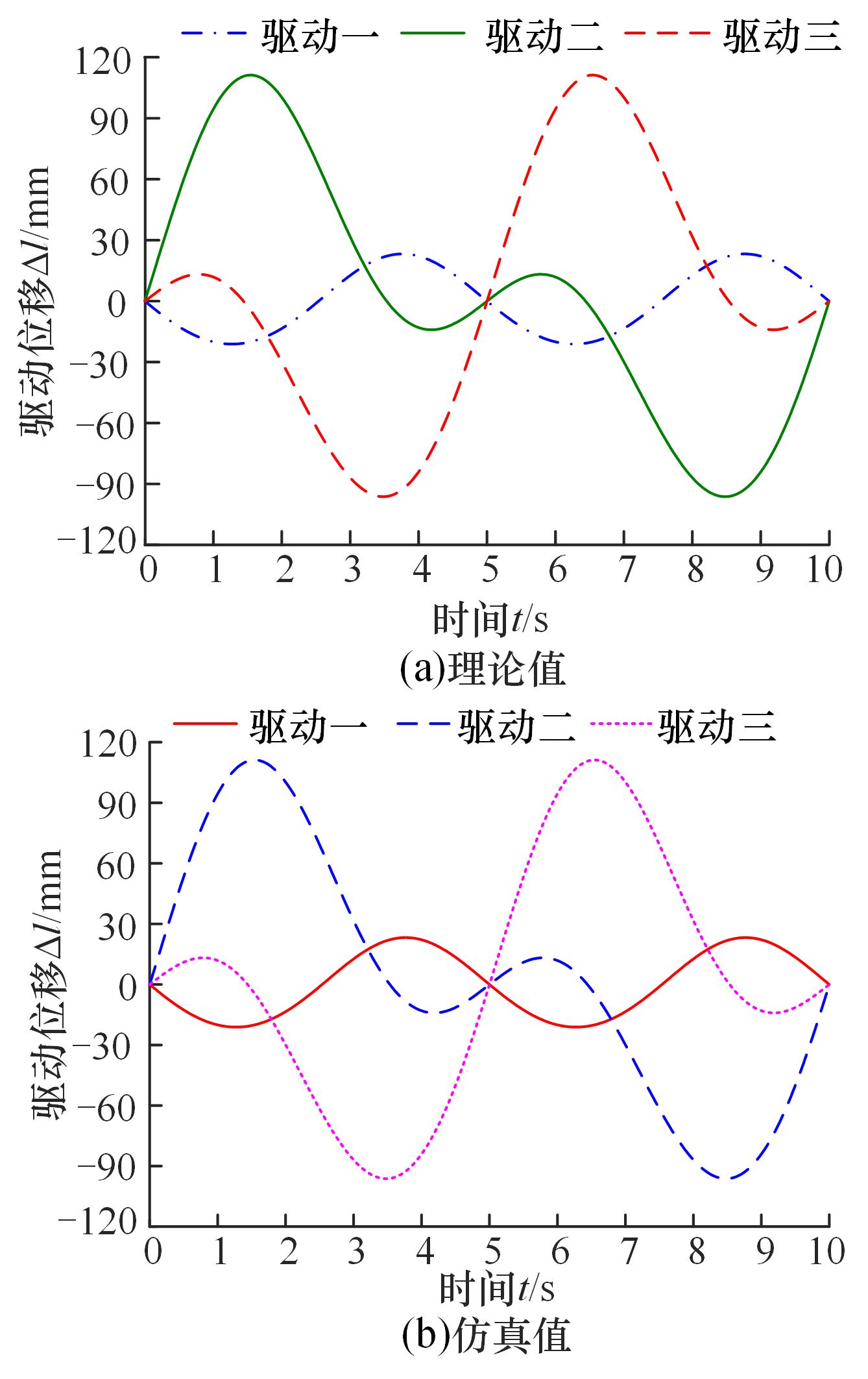
Fig.8 Low frequency driving displacement ΔlBi
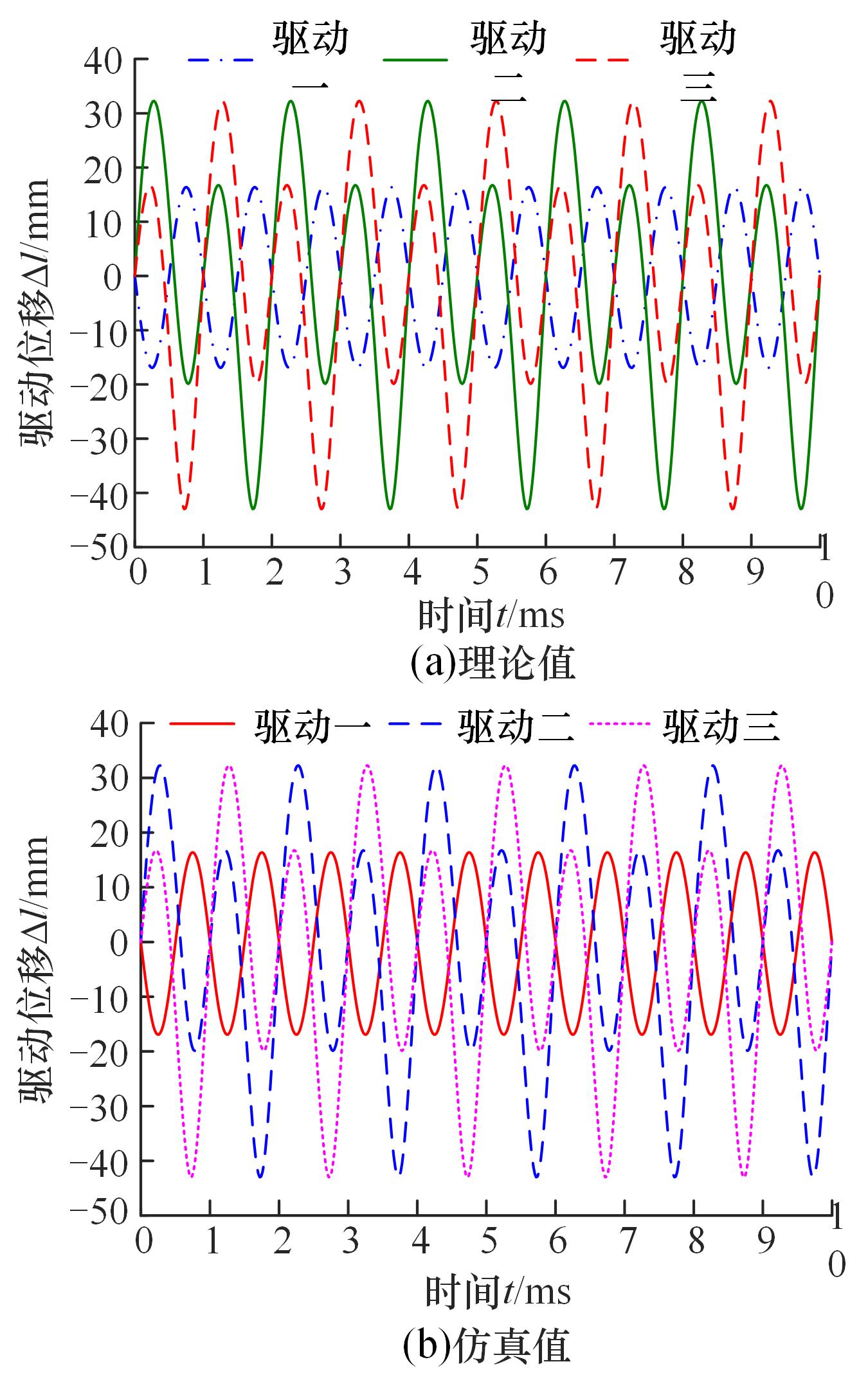
Fig.9 Medium frequency driving displacement ΔlGi
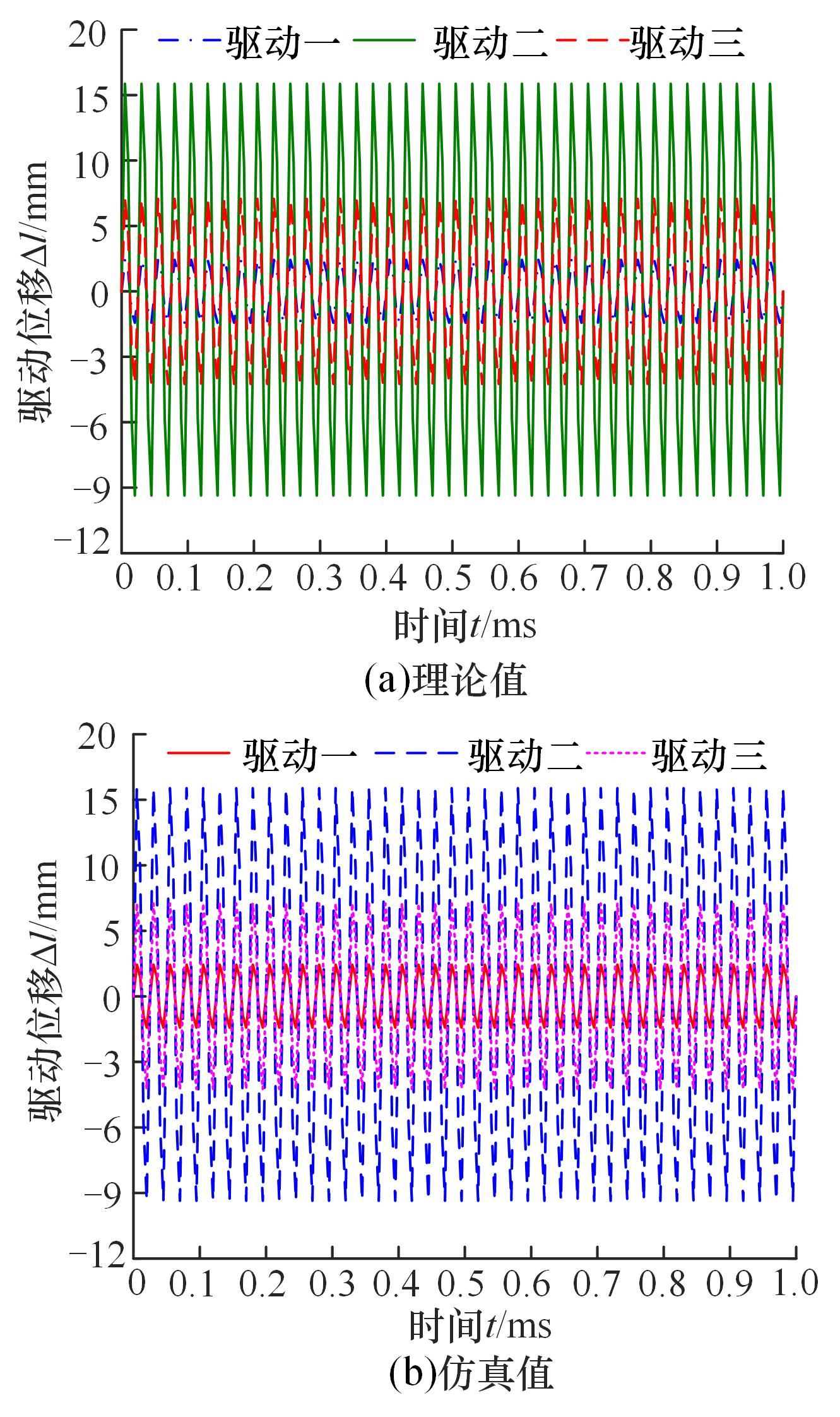
Fig.10 High frequency driving displacement ΔlHi
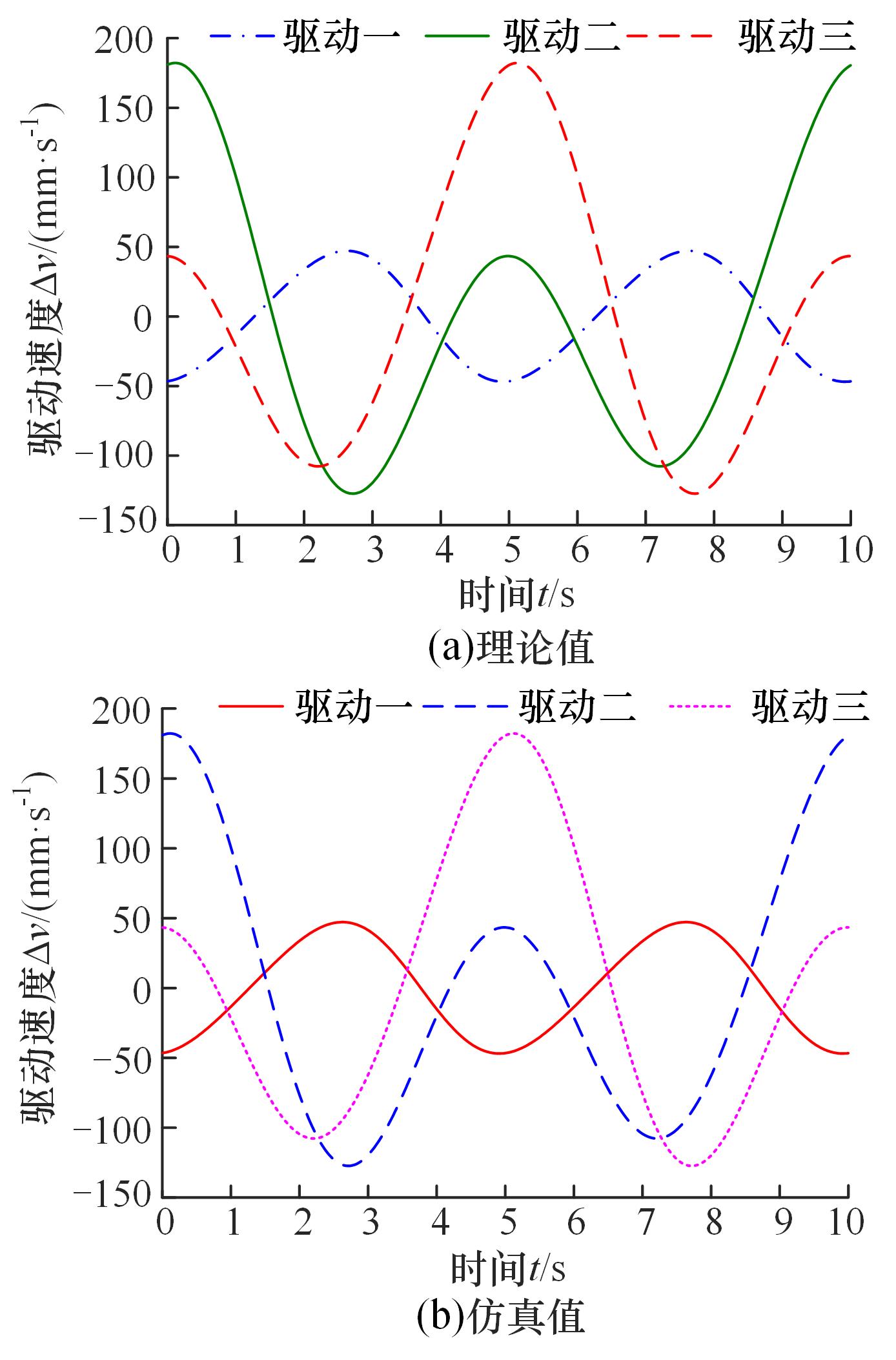
Fig.11 Low frequency driving velocity ΔvBi
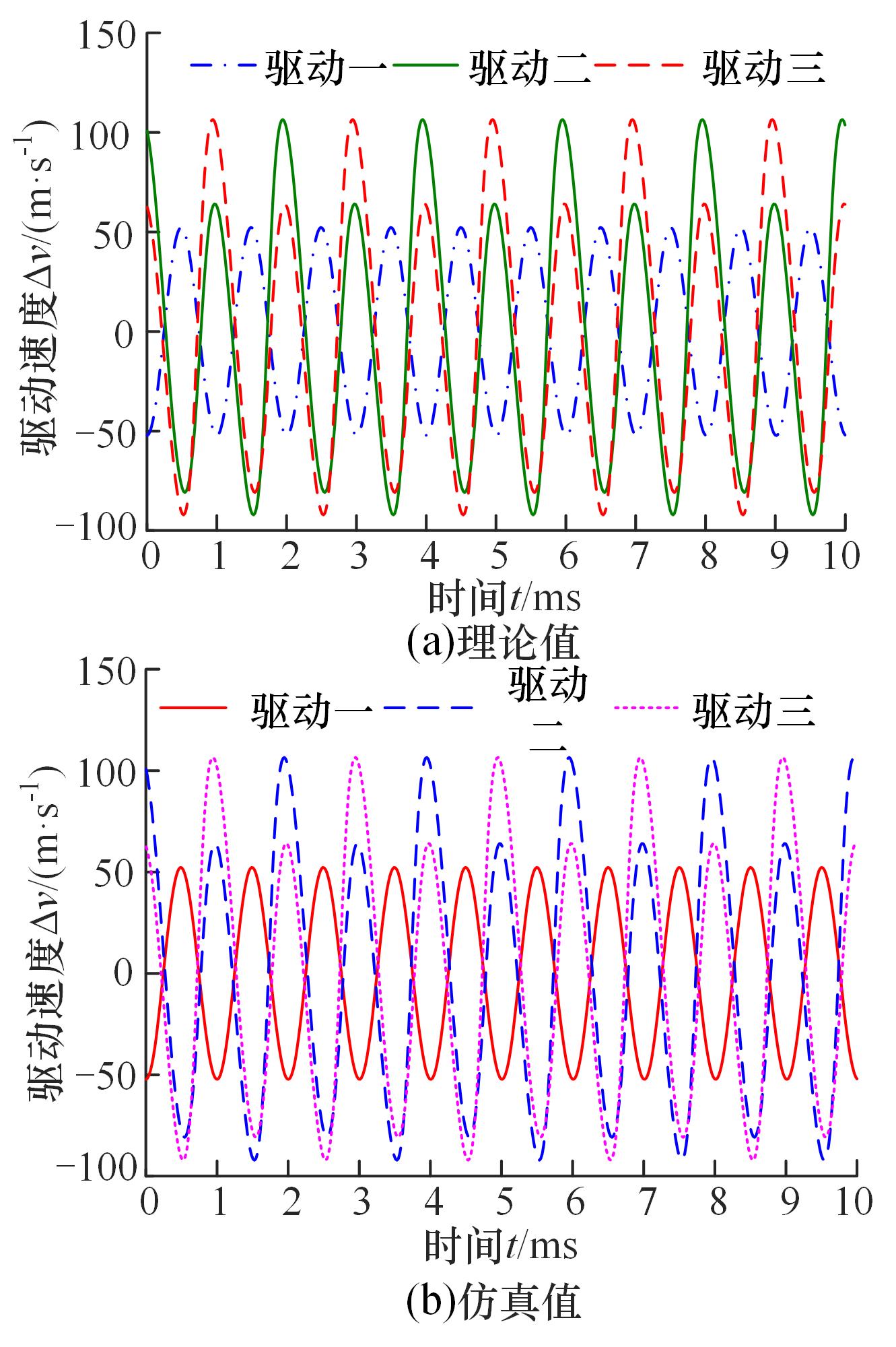
Fig.12 Medium frequency driving velocity ΔvGi
Fig.13 High frequency driving velocity ΔvHi
| 参数 | 初始值 | 优化值 |
|---|---|---|
| lCD | 750 | 767 |
| lBC | 250 | 234 |
| lCE | 100 | 103 |
| lEH | 600 | 591 |
| lFH | 400 | 404 |
| lGF | 515 | 519 |
Tab.3 The optimized structure parameters
| 参数 | 初始值 | 优化值 |
|---|---|---|
| lCD | 750 | 767 |
| lBC | 250 | 234 |
| lCE | 100 | 103 |
| lEH | 600 | 591 |
| lFH | 400 | 404 |
| lGF | 515 | 519 |
| 性能指标 | 初始值 | 优化值 | 优化幅度/% |
|---|---|---|---|
| 0.8033 | 0.8979 | 11.78 | |
| 0.7928 | 0.8716 | 9.94 | |
| 0.7999 | 0.8754 | 9.44 |
Tab.4 Comparison of ςlB、ςlG and ςlH
| 性能指标 | 初始值 | 优化值 | 优化幅度/% |
|---|---|---|---|
| 0.8033 | 0.8979 | 11.78 | |
| 0.7928 | 0.8716 | 9.94 | |
| 0.7999 | 0.8754 | 9.44 |
Fig.14 Low frequency drive performance map before optimization
Fig.15 Low frequency drive performance map after optimization
Fig.16 Medium frequency drive performance map before optimization
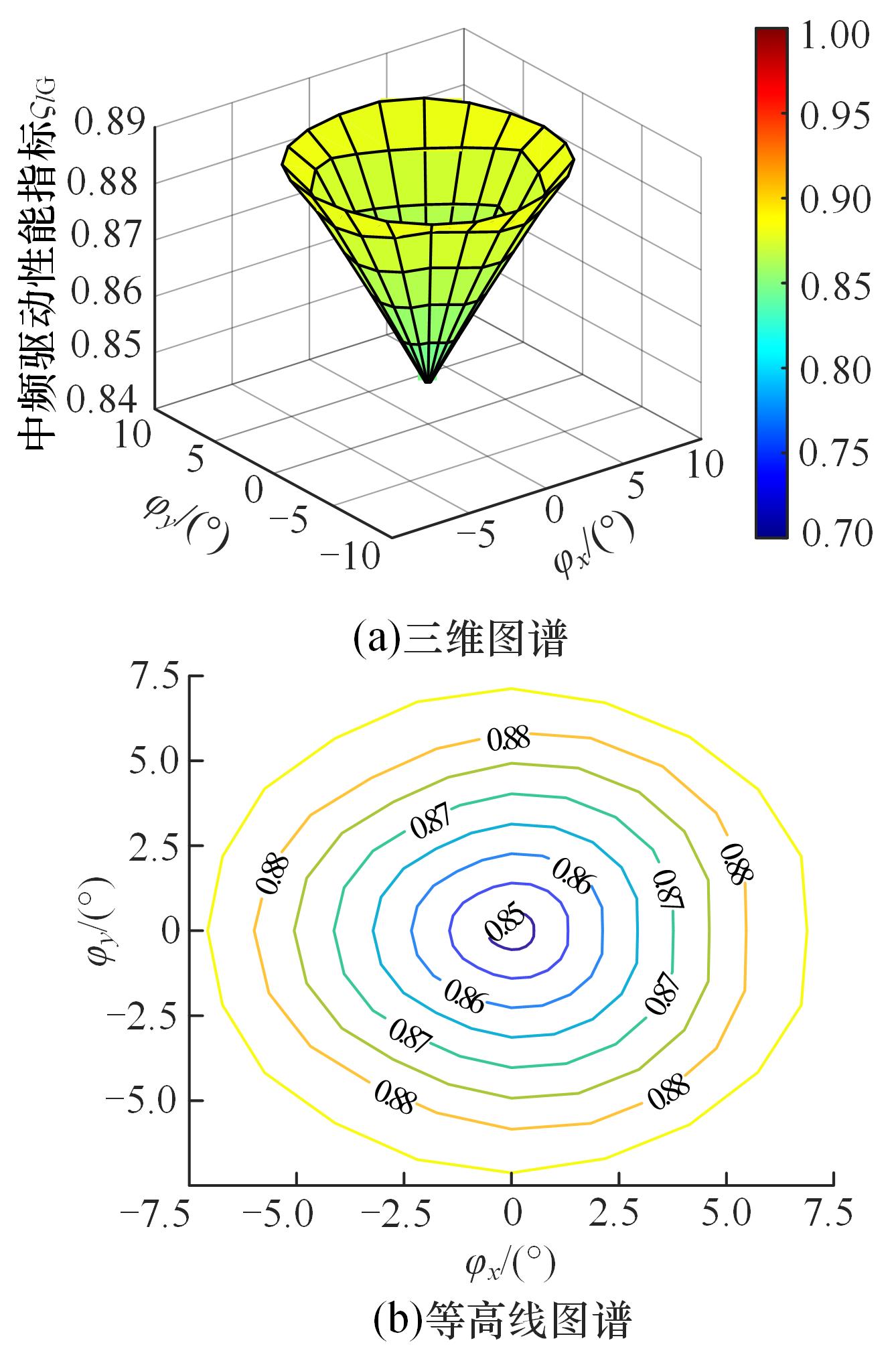
Fig.17 Medium frequency drive performance map after optimization
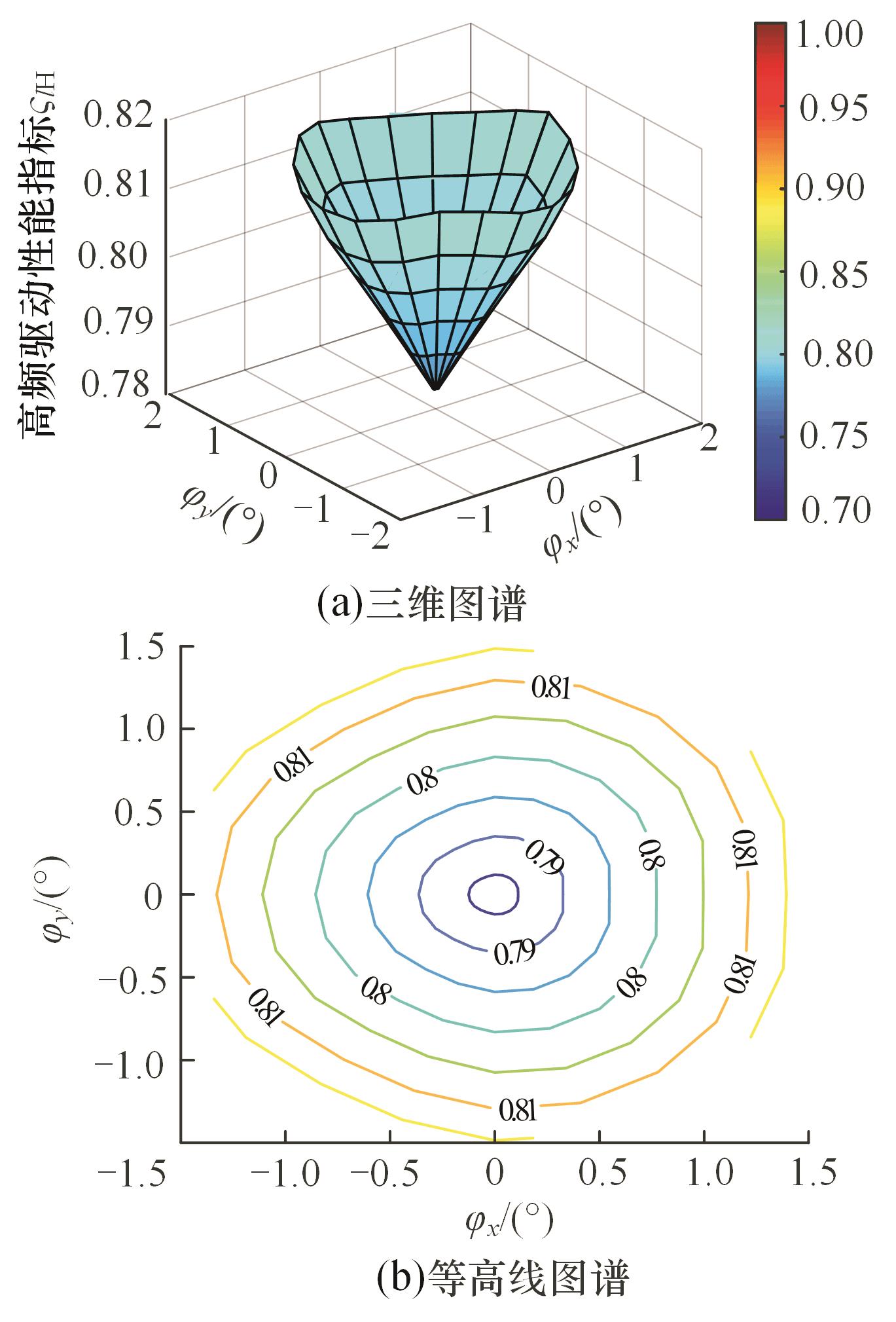
Fig.18 High frequency drive performance map before optimization
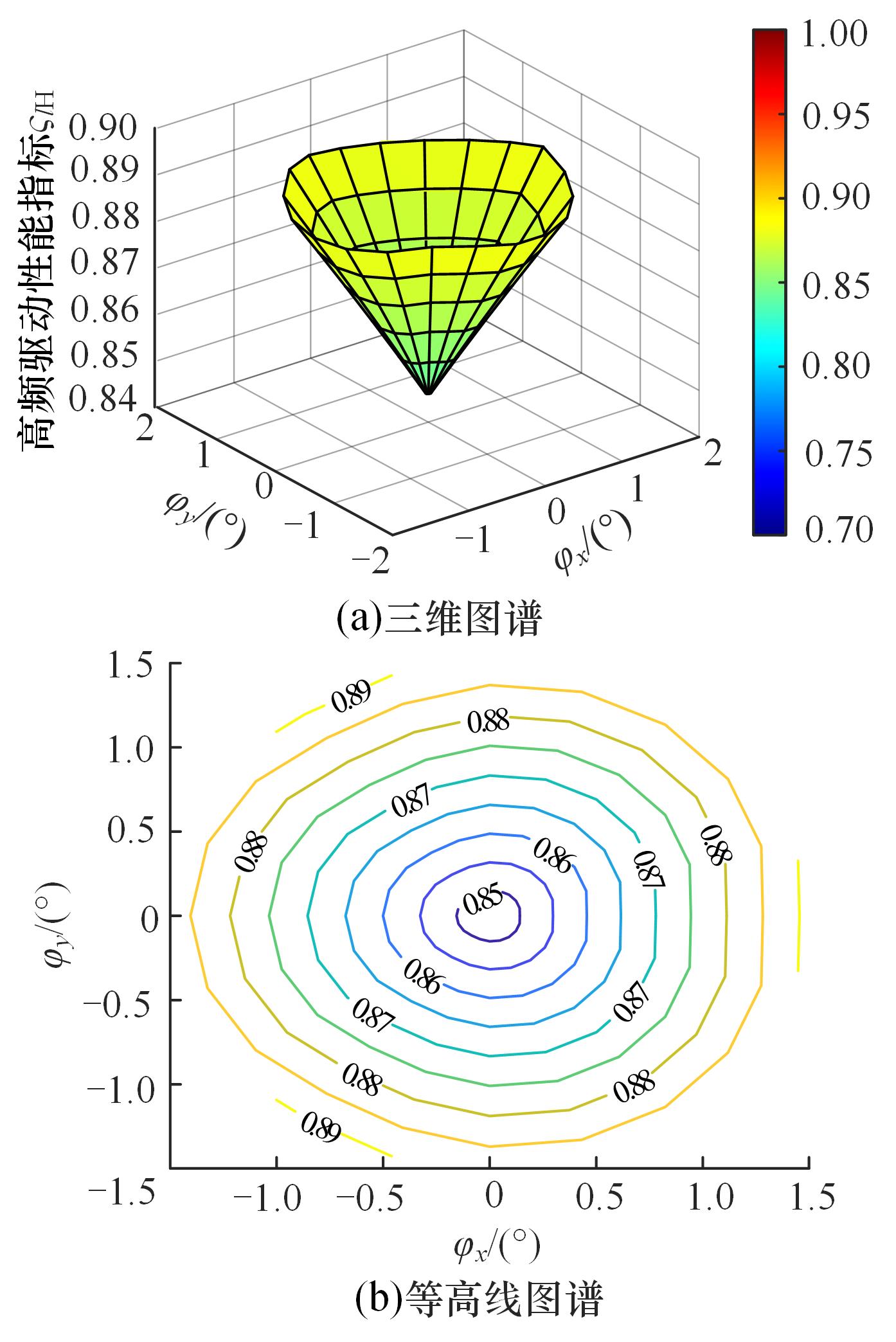
Fig.19 High frequency drive performance map after optimization
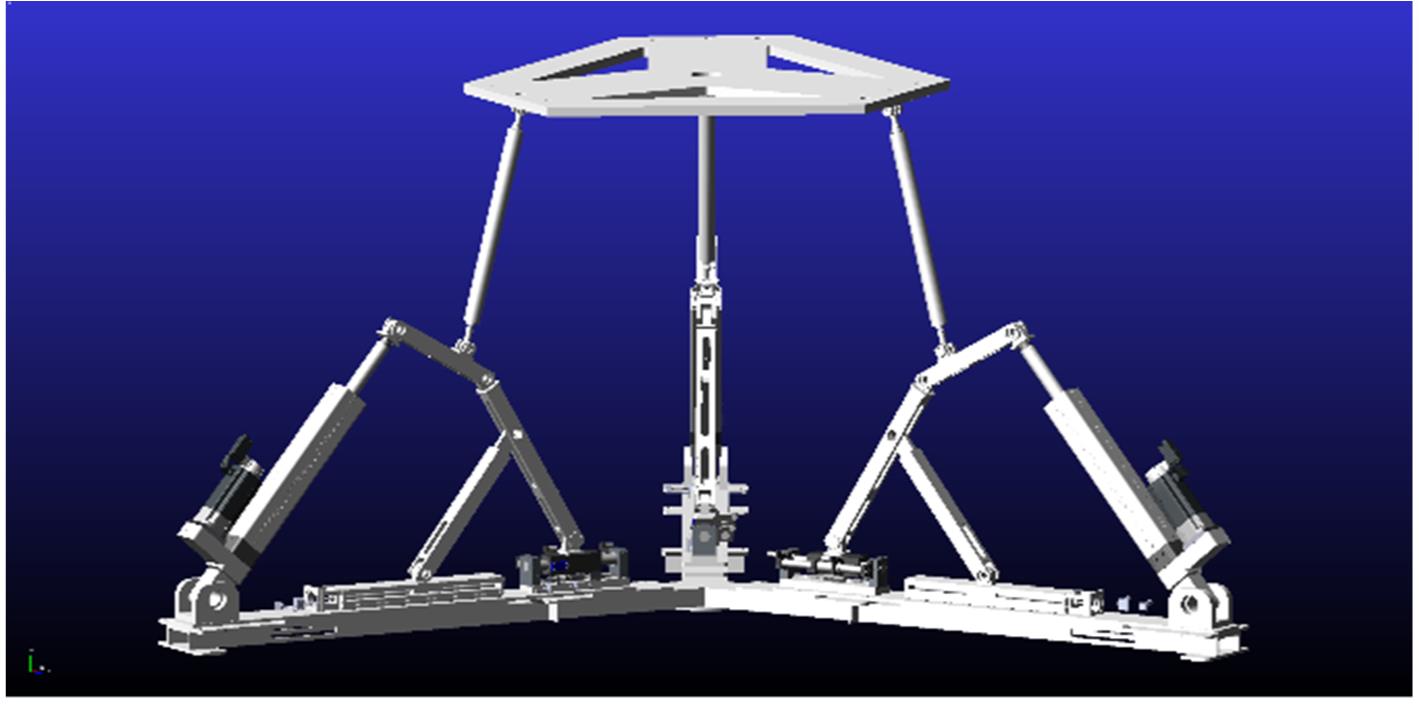
Fig.20 Optimized mechanism simulation model
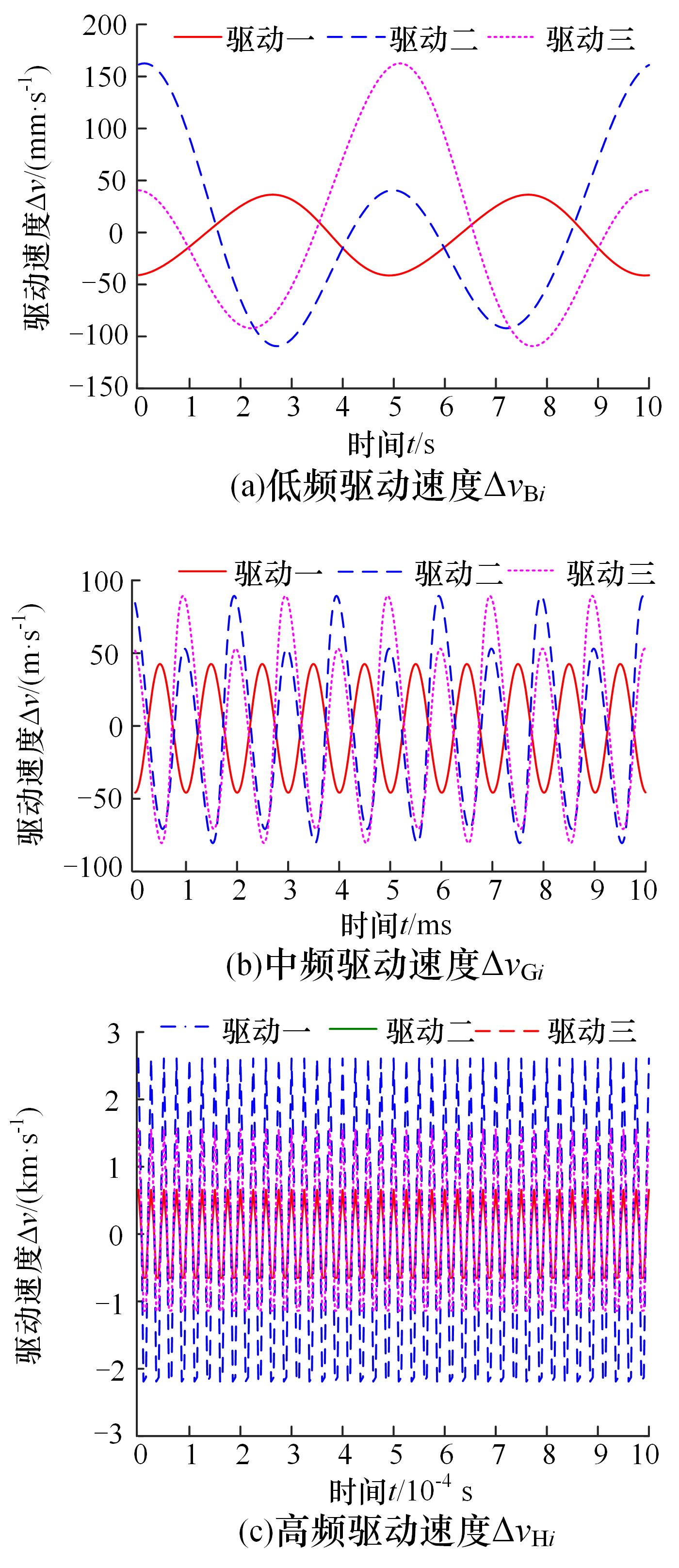
Fig.21 Optimized driving velocity
| [1] | NISHIDA T, SHIBASAKI H, ENOMOTO N, et al. Custom, Stable Platform[J]. New Equipment Digest, 2022, 87(1):22. |
| [2] | UBHI A S, PROKHOROV L, COOPER S, et al. Active Platform Stabilization with a 6D Seismometer[J]. Applied Physics Letters, 2022, 121(17):1-6. |
| [3] | HAN Bo, JIANG Yuan, YANG Wei, et al. Kinematics Characteristics Analysis of a 3-UPS/S Parallel Airborne Stabilized Platform[J]. Aerospace Science and Technology, 2023, 134: 108163. |
| [4] | 康熙, 戴建生. 机构学中机构重构的理论难点与研究进展——变胞机构演变内涵、分岔机理、设计综合及其应用[J]. 中国机械工程, 2020, 31(1): 57-71. |
| KANG Xi, DAI Jiansheng. Theoretical Difficulties and Research Progresses of Mechanism Reconfiguration in Mechanisms—Evolution Connotation, Furcation Principle, Design Synthesis and Application of Metamorphic Mechanisms[J]. China Mechanical Engineering, 2020, 31(1): 57-71. | |
| [5] | 于靖军, 刘凯, 孔宪文. 多模式机构研究进展[J]. 机械工程学报, 2020, 56(19): 14-27. |
| YU Jingjun, LIU Kai, KONG Xianwen. State of the Art of Multi-mode Mechanisms[J]. Journal of Mechanical Engineering, 2020, 56(19): 14-27. | |
| [6] | 单彦霞, 张建伟, 于靖军, 等. 多模式并联机构操作模式变换方法研究[J]. 农业机械学报, 2020, 51(6): 396-403. |
| SHAN Yanxia, ZHANG Jianwei, YU Jingjun, et al. Operation Mode Transformation Method of Multi-mode Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(6): 396-403. | |
| [7] | LACOMBE J, GOSSELIN C. Singularity Analysis of a Kinematically Redundant (6+2)-DOF Parallel Mechanism for General Configurations[J]. Mechanism and Machine Theory, 2022, 176: 105015. |
| [8] | GHAEDRAHMATI R, GOSSELIN C. Kinematic Analysis of a New 2-DOF Parallel Wrist with a Large Singularity-free Rotational Workspace[J]. Mechanism and Machine Theory, 2022, 175: 104942. |
| [9] | YIĞIT A, BRETON D, GOSSELIN C. Exploiting the Kinematic Redundancy of a (6+3)-degree-of-freedom Parallel Manipulator to Produce Unlimited Rotation of the Platform[J]. Journal of Mechanisms and Robotics, 2024, 16(7): 071004. |
| [10] | 龚峻山,方跃法,靳晓东. 基于并联手指结构的多功能灵巧手的设计与研究[J]. 中国机械工程,2020,31(23): 2837-2846. |
| GONG Junshan, FANG Yuefa, JIN Xiaodong, et al. Design and Research of Multifunctional Dexterous Hands Based on Parallel Finger Structure [J]. China Mechanical Engineering, 2020,31(23): 2837-2846. | |
| [11] | WANG Lin, FANG Yuefa, LI Luquan. Design and Analysis of the Gripper Mechanism Based on Generalized Parallel Mechanisms with Configurable Moving Platform[J]. Frontiers of Mechanical Engineering, 2021, 16(4): 765-781. |
| [12] | LI Luquan, FANG Yuefa, GUO Sheng, et al. Type Synthesis of a Class of Novel 3-DOF Single-loop Parallel Leg Mechanisms for Walking Robots[J]. Mechanism and Machine Theory, 2020, 145: 103695. |
| [13] | LI Luquan, FANG Yuefa, WANG Lin. Design of a Family of Multi-DOF Drive Systems for fewer Limb Parallel Mechanisms[J]. Mechanism and Machine Theory, 2020, 148: 103802. |
| [14] | QU Haibo, HU Lanqing, GUO Sheng. Singularity Analysis and Avoidance of a Planar Parallel Mechanism with Kinematic Redundancy under a Fixed Orientation[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2021, 235(18): 3534-3553. |
| [15] | 曲海波, 胡榄庆, 郭盛, 等. 含支链闭环的结构冗余平面并联机构静力学分析[J]. 中南大学学报(自然科学版), 2020, 51(10): 2758-2771. |
| QU Haibo, HU Lanqing, GUO Sheng, et al. Statics Analysis of a Planar Parallel Mechanism with Kinematic Redundancy and Closed-loop Limb[J]. Journal of Central South University (Science and Technology), 2020, 51(10): 2758-2771. | |
| [16] | QU Haibo, GUO Sheng. Kinematics Analysis of a Novel Planar Parallel Manipulator with Kinematic Redundancy[J]. Journal of Mechanical Science and Technology, 2017, 31(4): 1927-1935. |
| [17] | 陈宇航, 赵铁石, 耿明超, 等. 闭环双驱动混合输出六自由度并联机构运动分析[J]. 中国机械工程, 2015, 26(20): 2793-2800. |
| CHEN Yuhang, ZHAO Tieshi, GENG Mingchao, et al. Kinematic Analysis of a 6-DOF Parallel Mechanism with Closed Loop Dual-drive and Composite Output[J]. China Mechanical Engineering, 2015, 26(20): 2793-2800. | |
| [18] | 赵星宇, 赵铁石, 云轩, 等. 高低频复合驱动的并联调姿隔振平台的运动分析[J]. 机器人, 2018, 40(1): 24-36. |
| ZHAO Xingyu, ZHAO Tieshi, YUN Xuan, et al. Kinematics Analysis of Parallel Position Adjustment and Vibration Isolation Platform with High and Low Frequency Compound Drive[J]. Robot, 2018, 40(1): 24-36. | |
| [19] | ZHAO Xingyu, ZHAO Tieshi, WANG Chang, et al. Type Synthesis and Analysis of Parallel Mechanisms with Sub-closed-loops[J]. Mechanism and Machine Theory, 2018, 120: 140-165. |
| [20] | 张金柱, 史汉卿, 王涛, 等. 五自由度并联驱动机构及其位置分辨能力分析[J]. 中国机械工程, 2021, 32(12): 1414-1422. |
| ZHANG Jinzhu, SHI Hanqing, WANG Tao, et al. Analysis of 5-DOF Parallel Driving Mechanisms and Their Position Resolution[J]. China Mechanical Engineering, 2021, 32(12): 1414-1422. | |
| [21] | 金振林, 张金柱, 高峰. 一种消防六足机器人及其腿部机构运动学分析[J]. 中国机械工程, 2016, 27(7): 865-871. |
| JIN Zhenlin, ZHANG Jinzhu, GAO Feng. A Firefighting Six-legged Robot and Its Kinematics Analysis of Leg Mechanisms[J]. China Mechanical Engineering, 2016, 27(7): 865-871. | |
| [22] | TIAN Xin, ZHAO Tieshi, SHENG Yu, et al. Modeling and Prototype of a Machining Robot with R(3-RUHR)/UURP Hybrid Module[J]. Journal of Mechanisms and Robotics, 2023, 15(1): 011007. |
| [23] | WANG Chang, ZHAO Tieshi, LI Erwei, et al. A Novel Index to Evaluate the Mapping of Parallel Mechanisms from Internal to External Wrenches[J]. Mechanism and Machine Theory, 2021, 155: 104058. |
| [24] | WANG Jinsong, WU Chao, LIU Xin-Jun. Performance Evaluation of Parallel Manipulators: Motion/Force Transmissibility and Its Index[J]. Mechanism and Machine Theory, 2010, 45(10): 1462-1476. |
| [25] | RUSSO M, ZHANG Dan, LIU Xin-Jun, et al. A Review of Parallel Kinematic Machine Tools: Design, Modeling, and Applications[J]. International Journal of Machine Tools and Manufacture, 2024, 196: 104118. |
| [26] | 孙鹏, 李研彪, 张聪, 等. 基于运动性能分析的仿人机械臂尺度优化[J]. 中国机械工程, 2022, 33(19): 2331-2340. |
| SUN Peng, LI Yanbiao, ZHANG Cong, et al. Scale Optimization of Humanoid Robotic Arms Based on Kinematic Performance Analysis[J]. China Mechanical Engineering, 2022, 33(19): 2331-2340. |
| [1] |
LI Meng-Lei, GU Yo-Qin, ZHANG Hua-Liang, LIU Li-Qin, DU Juan, WEN Chu-Hua, LAN Guo-Sheng.
Parallel Mechanism Structure Optimization Design Based on Multi-objective Differential Evolution Algorithm
[J]. J4, 201016, 21(16): 1915-1920.
|
| [2] |
LU Kai-Jiang, SHI Dun-Beng, ZHANG Feng-Chao.
Dynamics Optimization Design of Planar 3-DOF Parallel Mechanism
[J]. J4, 201016, 21(16): 1926-1931.
|
| [3] | Ningning HUANG, Jingjing YOU, Pengda YE, Huiping SHEN, Chenggang LI, Hongtao WU. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(9): 1951-1960. |
| [4] | Ju LI, Yue GUO, Huiping SHEN, Qinmei MENG, Xiaoyang GU. Optimization Principle and General Method for Multiple Topology Decoupling of Parallel Mechanisms [J]. China Mechanical Engineering, 2025, 36(8): 1700-1712. |
| [5] | PU Zhixin, GUO Jianwei, PAN Yuqi, BAI Yangxi. Performance Analysis and Optimization Design of 2PPaPaR Parallel Mechanism [J]. China Mechanical Engineering, 2023, 34(19): 2304-2312. |
| [6] | SHEN Huiping, LI XiaLI Ju, LI Tao, MENG Qingmei, WU Guanglei. Effect of Constrained or Unconstrained Branches on Kinematics and Stiffness Performance of PMs —Design,Analysis and Optimization of Two Novel Three-translation PMs with Partial Motion Decoupling Being Examples#br# [J]. China Mechanical Engineering, 2023, 34(13): 1533-1549. |
| [7] | DU Zhongqiu, SHEN Huiping, MENG Qingmei, LI Tao, YANG Tingli. Design and Performance Analysis of 8R Two-translational Spatial Parallel Mechanism with Motion Decoupling and Symbolic Positive Solutions [J]. China Mechanical Engineering, 2023, 34(12): 1425-1435. |
| [8] | CHEN Hengtong, WANG Xiaoguang, JIANG Hailong, LIN Qi. Analysis and Comparison of Kinematic Characteristics for Two Typical 6-DOF Suspension Mechanisms at High Angles of Attack [J]. China Mechanical Engineering, 2023, 34(06): 641-649. |
| [9] | LIAO Cancan, ZHANG Yuanyuan, MO Han. Optimal Design of Tracking Mechanisms for a New Type Dish Solar ConcentratorLIU Fanmao [J]. China Mechanical Engineering, 2023, 34(04): 395-403. |
| [10] | DONG Chenglin, CAI Longqi, LI Yi, LU Tong, ZHANG Luke. Isotropy Design and Vibration Reduction of a Three-dimensional Dynamics Vibration Absorber Based on Parallel Mechanisms [J]. China Mechanical Engineering, 2023, 34(03): 307-313. |
| [11] | WANG Manxin, LI Lanbin, LI Zhengliang, LIU Haitao, HUANG Tian. Topological Structure Synthesis and Optimization of 1T2R Parallel Mechanisms [J]. China Mechanical Engineering, 2022, 33(20): 2395-2402. |
| [12] | WANG Yixi, SHEN Huiping, CHEN Pu, WU Guanglei. Three-level Orderly Proceeding Optimization Design and Its Applications for Parallel Mechanisms Based on Kinematics,Stiffness and Dynamics [J]. China Mechanical Engineering, 2022, 33(13): 1560-1575,1621. |
| [13] | ZHU Yaguang, ZHU Jianwei, LI Ruyue, SONG Zhipeng. Neuromuscular Architecture Based Compliance Control of Bionic Parallel Torsos [J]. China Mechanical Engineering, 2022, 33(13): 1576-1585,1637. |
| [14] | ZHANG Yanbin, WANG Keming, LU Fenglin, WEI Xuemin, WANG Kefeng. Type Synthesis of Uncoupled Two-rotational Parallel Mechanism with One Pure Constraint Branch [J]. China Mechanical Engineering, 2022, 33(01): 54-61. |
| [15] | ZHANG Ying, SUN Hao, MA Shuaishuai. Design of a Kind of Multi-dimensional Attitude Adjustment and Vibration Isolation Platform Based on 4-UPS/CPC Parallel Mechanisms#br# [J]. China Mechanical Engineering, 2021, 32(13): 1513-1522,1529. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||