

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (10): 2463-2471.DOI: 10.3969/j.issn.1004-132X.2025.10.036
Previous Articles Next Articles
Huifang KONG( ), Chenshun WANG, Qian ZHANG(), Tiankuo LIU
), Chenshun WANG, Qian ZHANG(), Tiankuo LIU
Received:2024-08-30
Online:2025-10-25
Published:2025-11-05
Contact:
Qian ZHANG
孔慧芳(), 王晨顺, 张倩(), 刘田阔
通讯作者:
张倩
作者简介:孔慧芳,女,1964年生,教授、博士研究生导师。研究方向为控制理论与控制工程、新能源汽车运动规划等。E-mail:1989800024@hfut.edu.cn基金资助:CLC Number:
Huifang KONG, Chenshun WANG, Qian ZHANG, Tiankuo LIU. Intelligent Vehicle Trajectory Planning Based on Spatio-temporal Risk Fields[J]. China Mechanical Engineering, 2025, 36(10): 2463-2471.
孔慧芳, 王晨顺, 张倩, 刘田阔. 基于时空风险场的智能车辆轨迹规划[J]. 中国机械工程, 2025, 36(10): 2463-2471.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.10.036
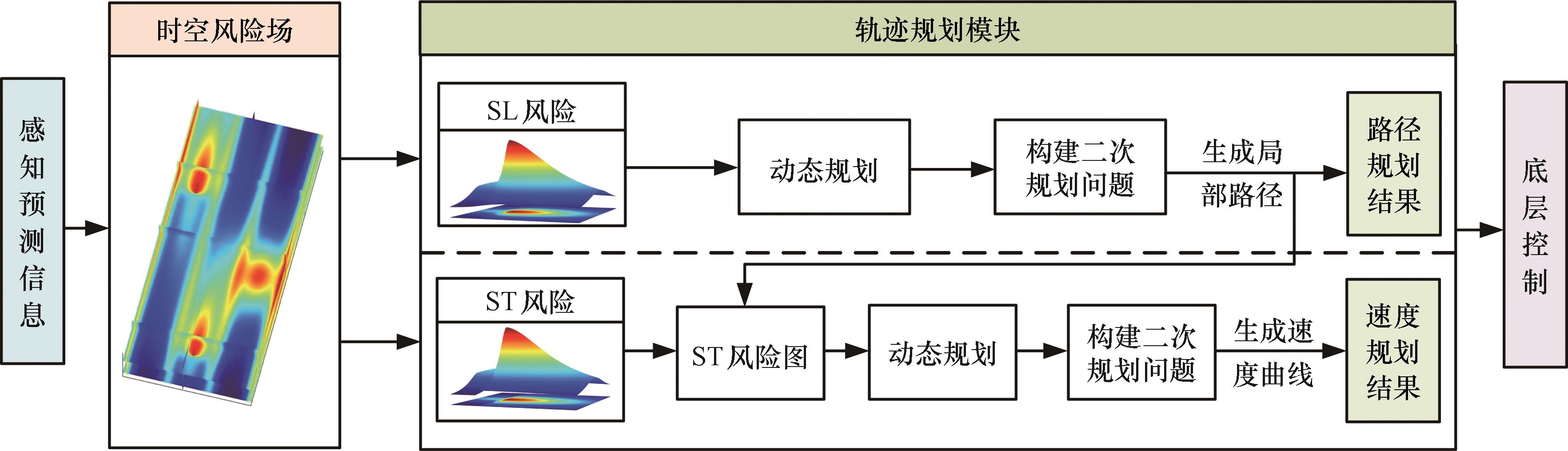
Fig.1 Trajectory planning architecture based on spatio-temporal risk field
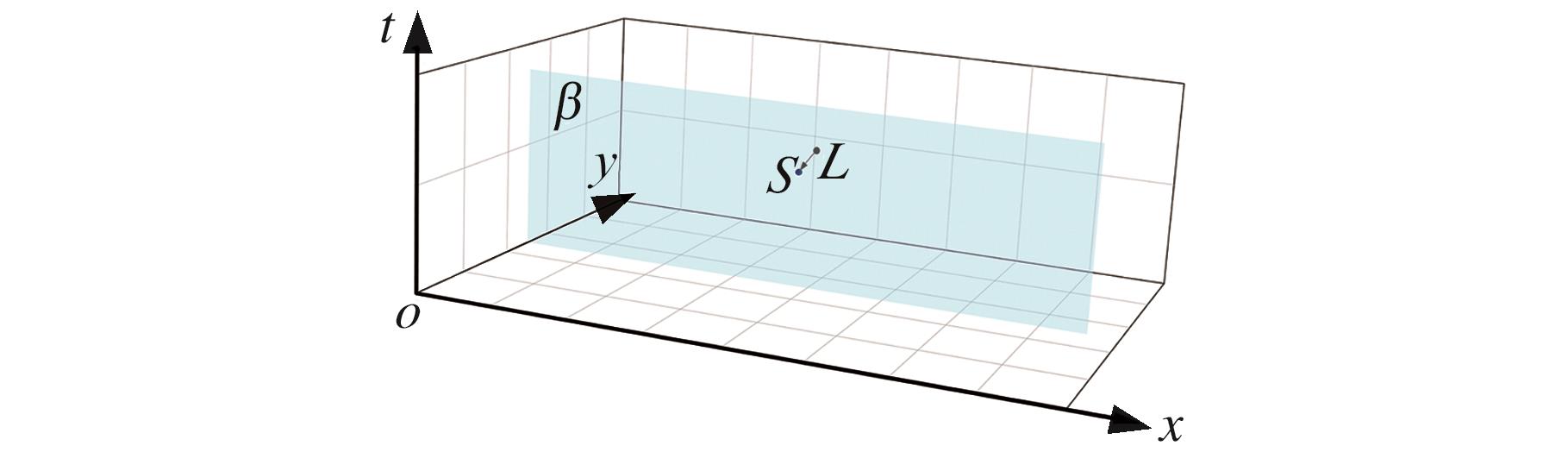
Fig.2 Schematic method of spatio-temporal risk field modeling of abstract elements
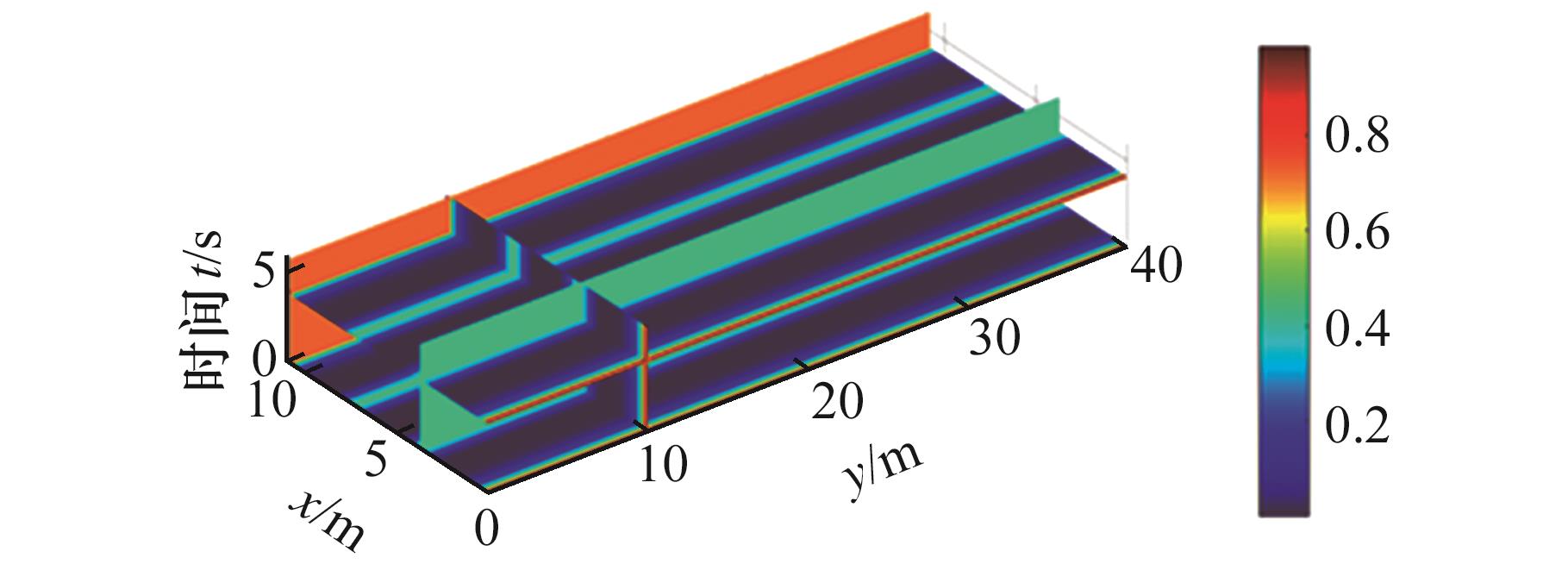
Fig.3 Spatio-temporal risk field of abstract elements
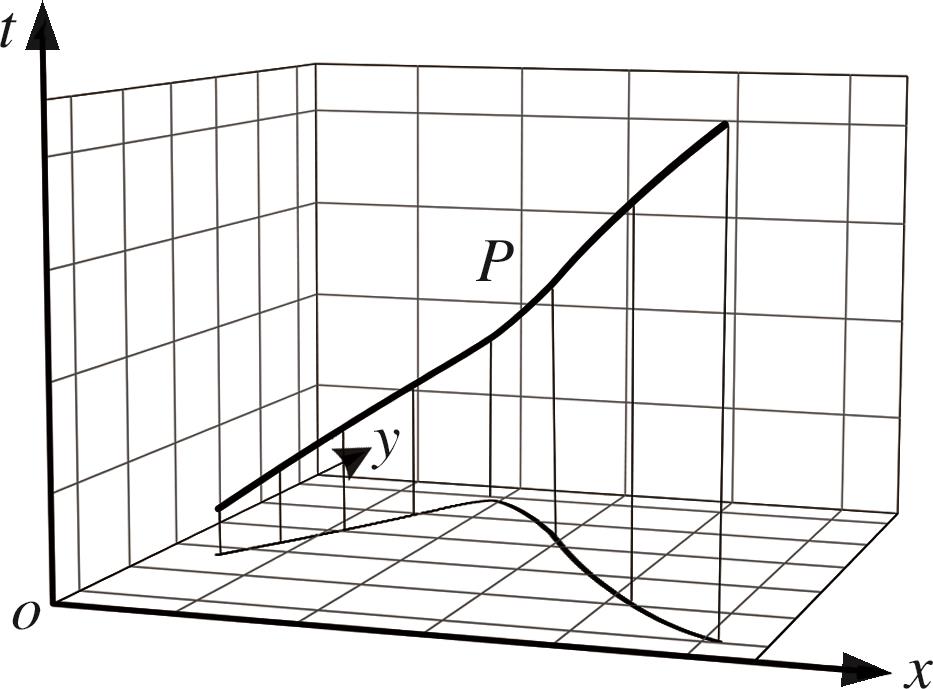
Fig.4 Plots spatio-temporal trajectories
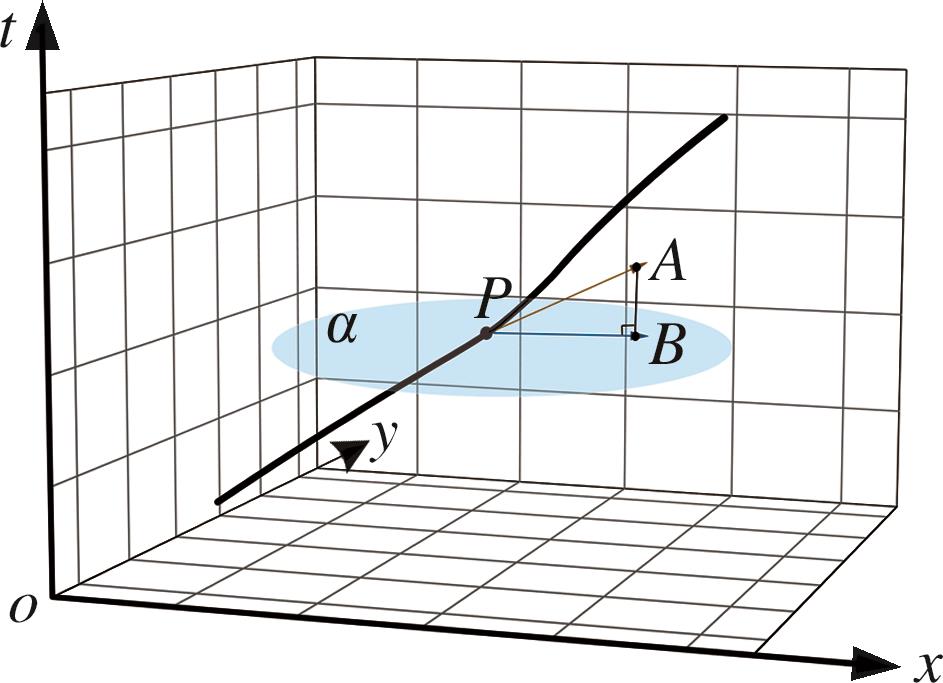
Fig. 5 Tangent vector and projection rendering of spatio-temporal trajectory
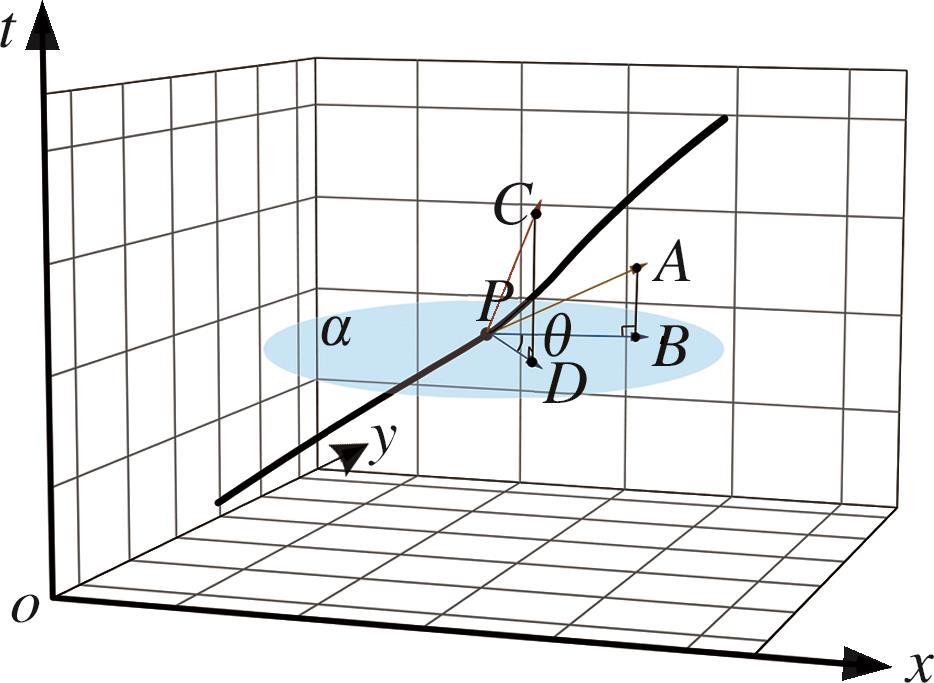
Fig.6 θ angle acquisition
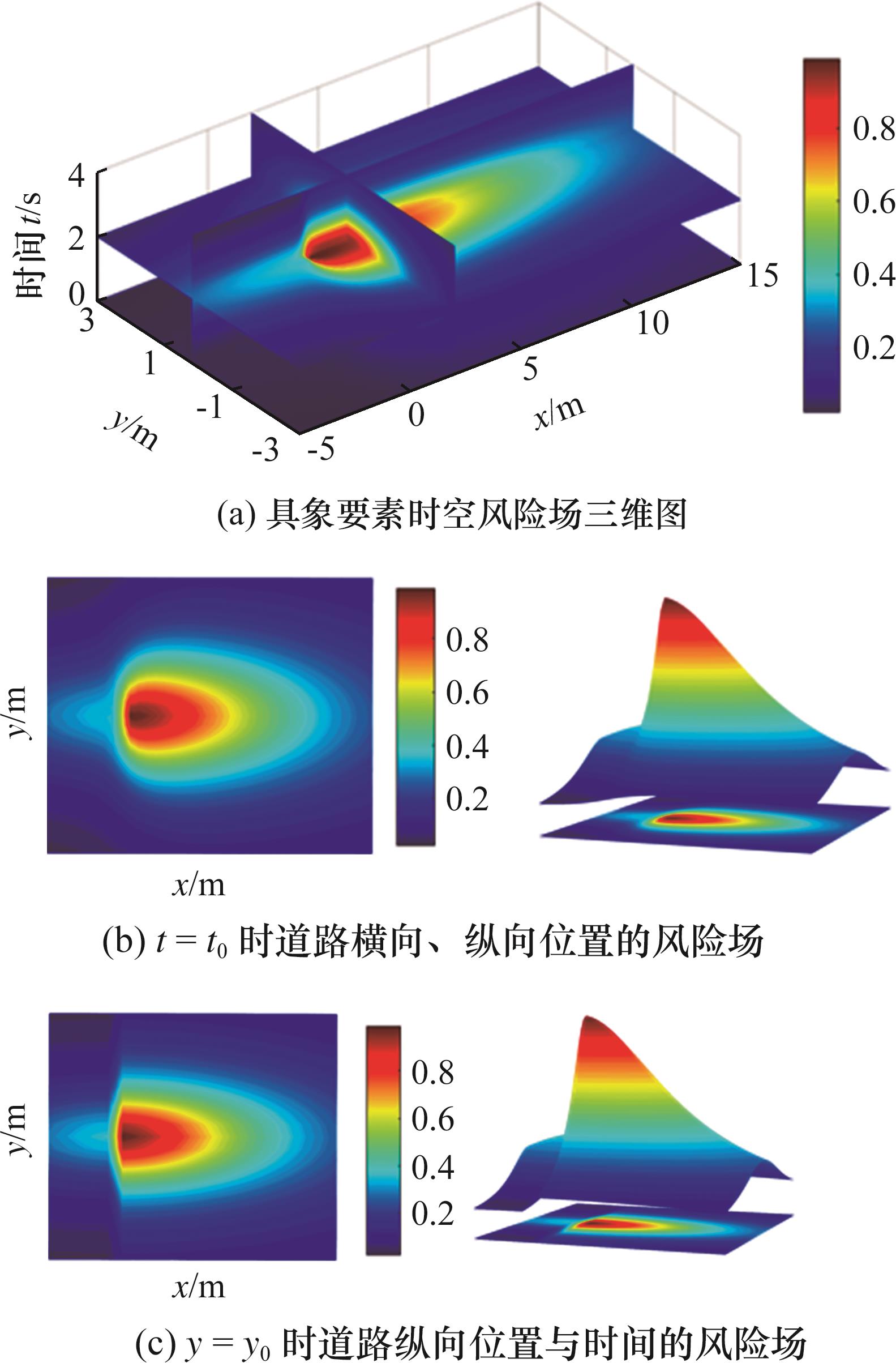
Fig.7 Spatio-temporal risk field of concrete elements
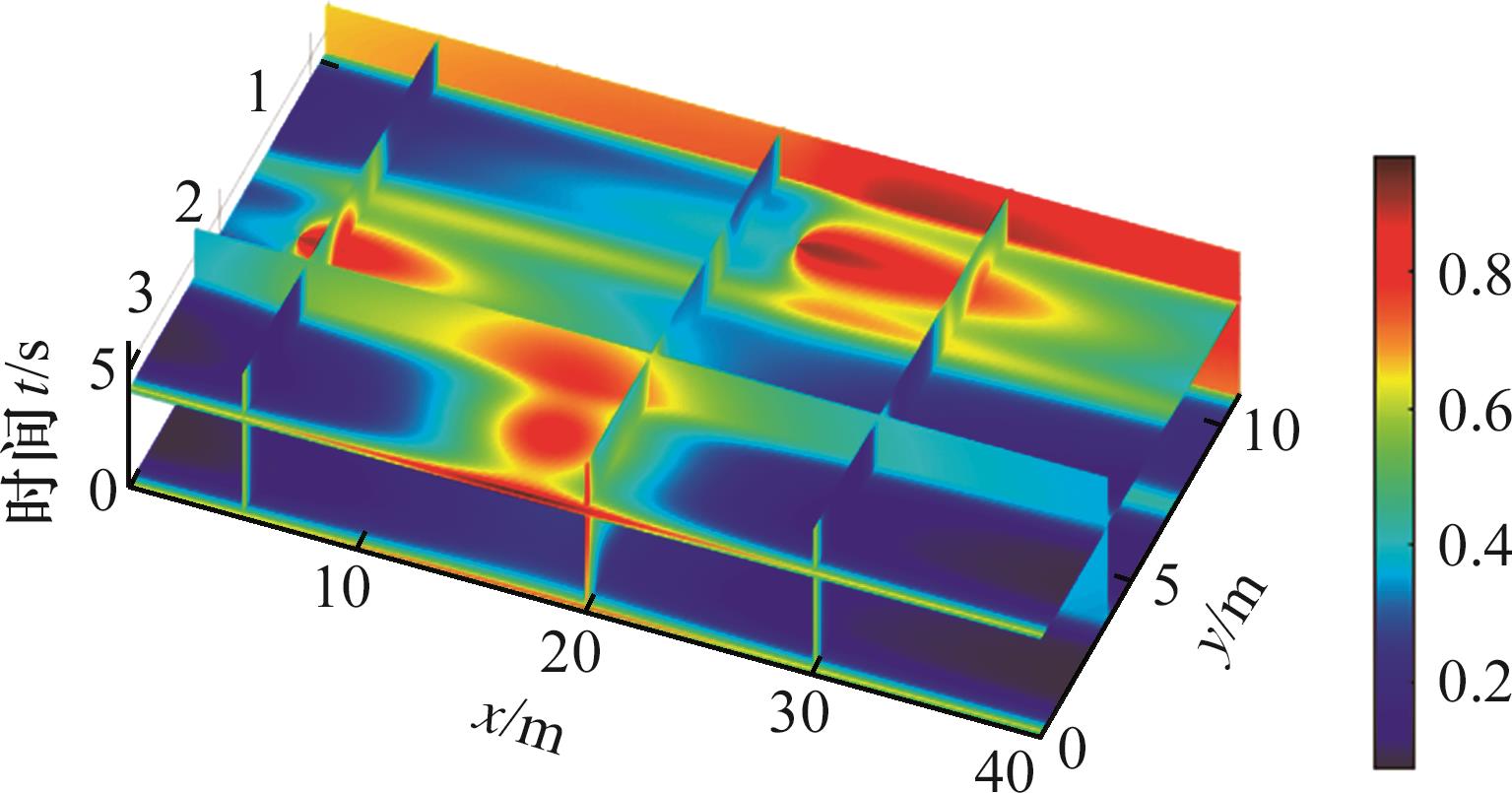
Fig.8 Schematic diagram of spatio-temporal risk field
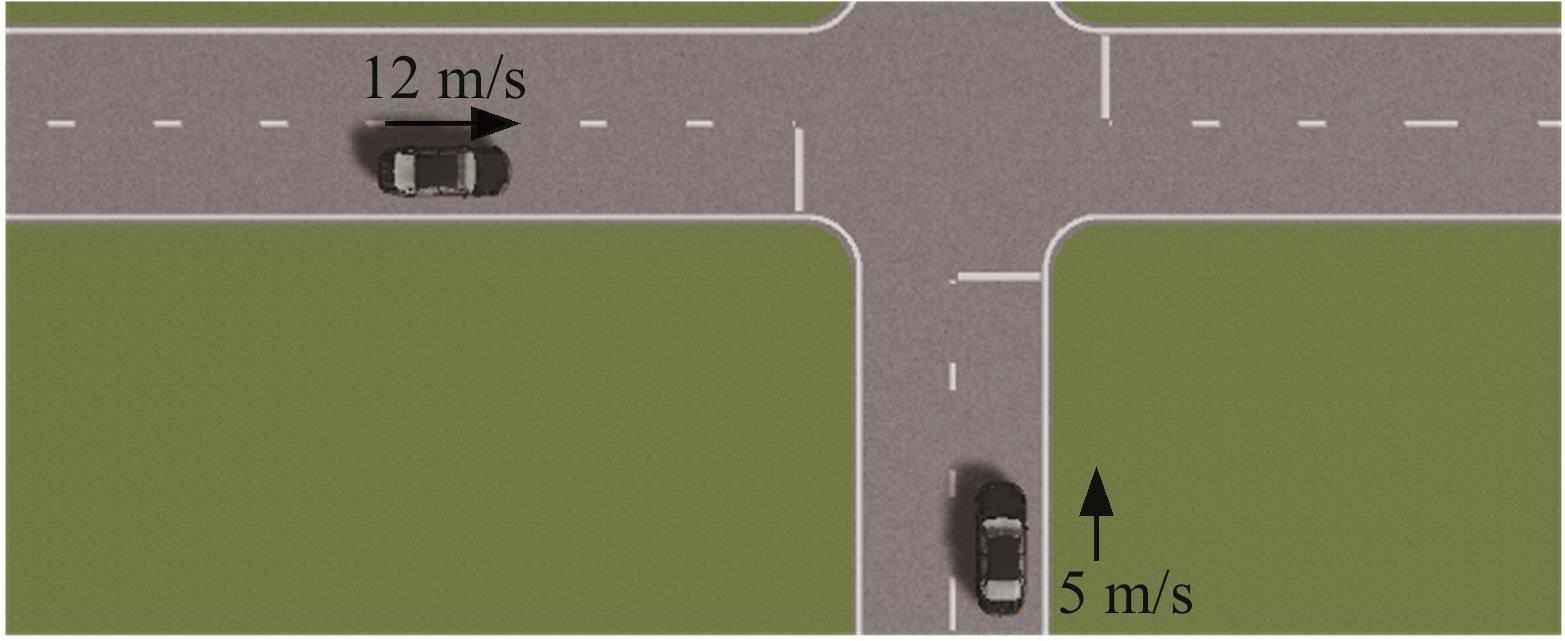
Fig.9 Intersection scene
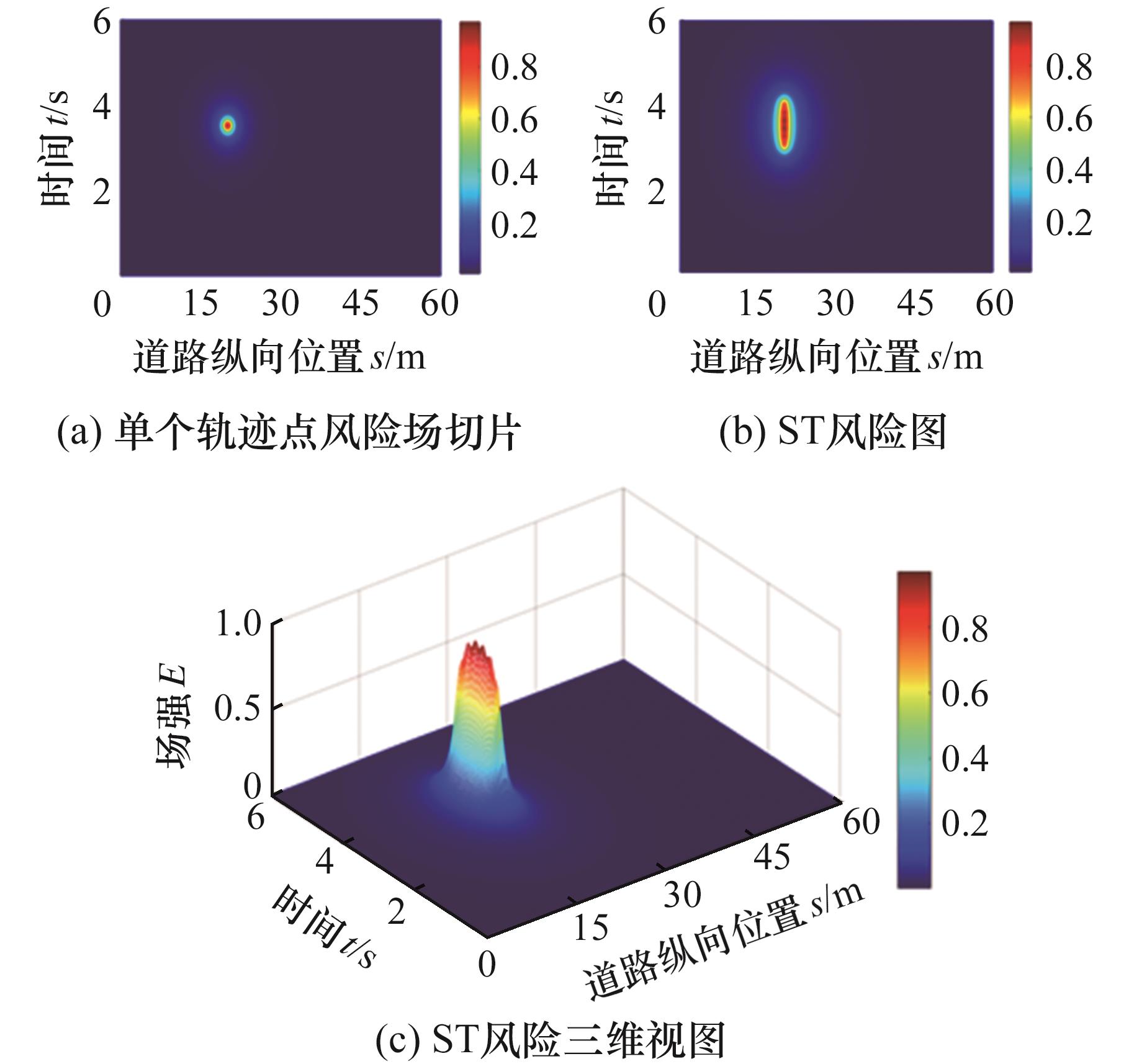
Fig.10 ST risk map generation

Fig.11 Driving scene on a straight road
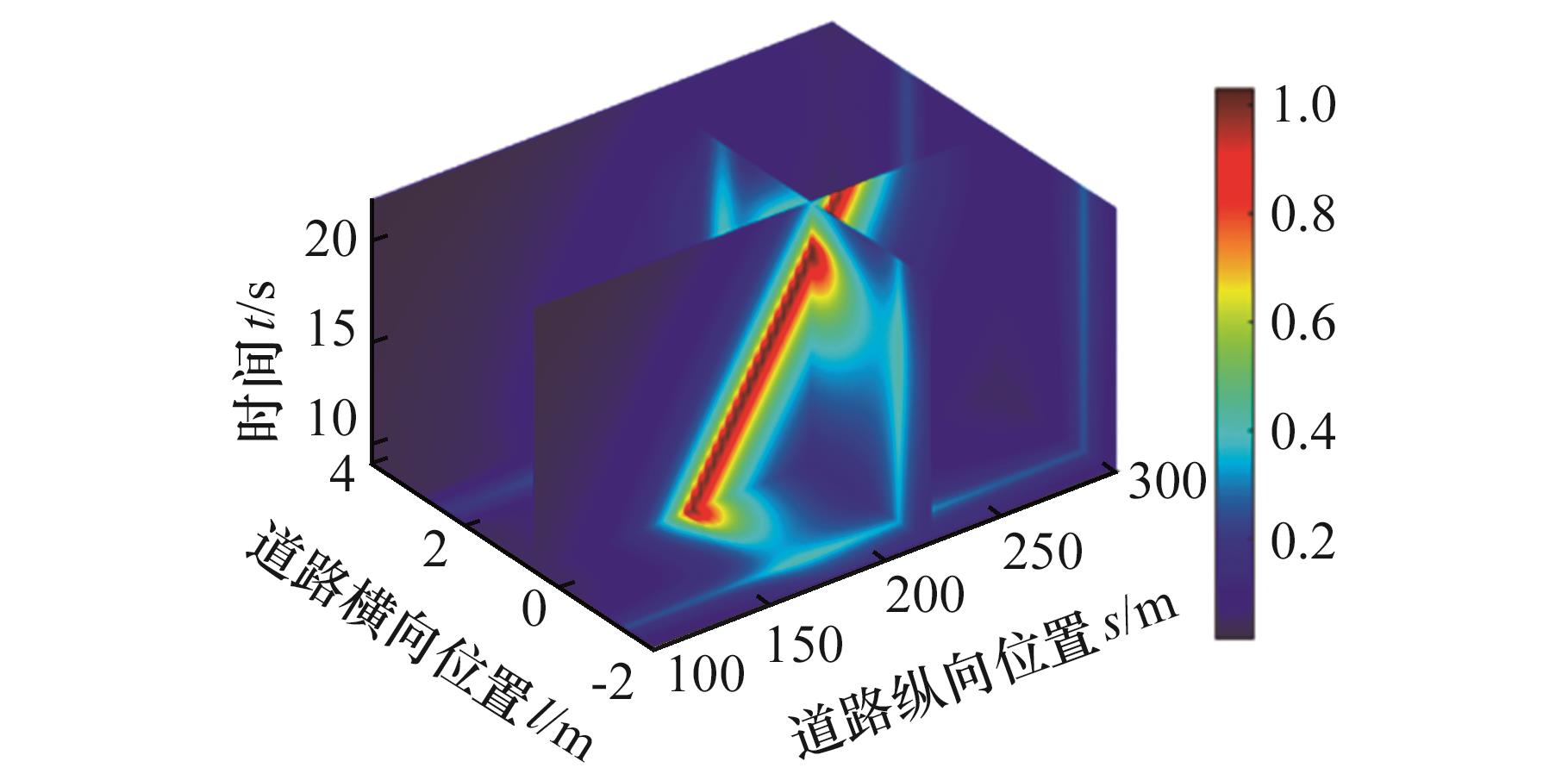
Fig.12 Spatio-temporal risk of straight-line driving scenario
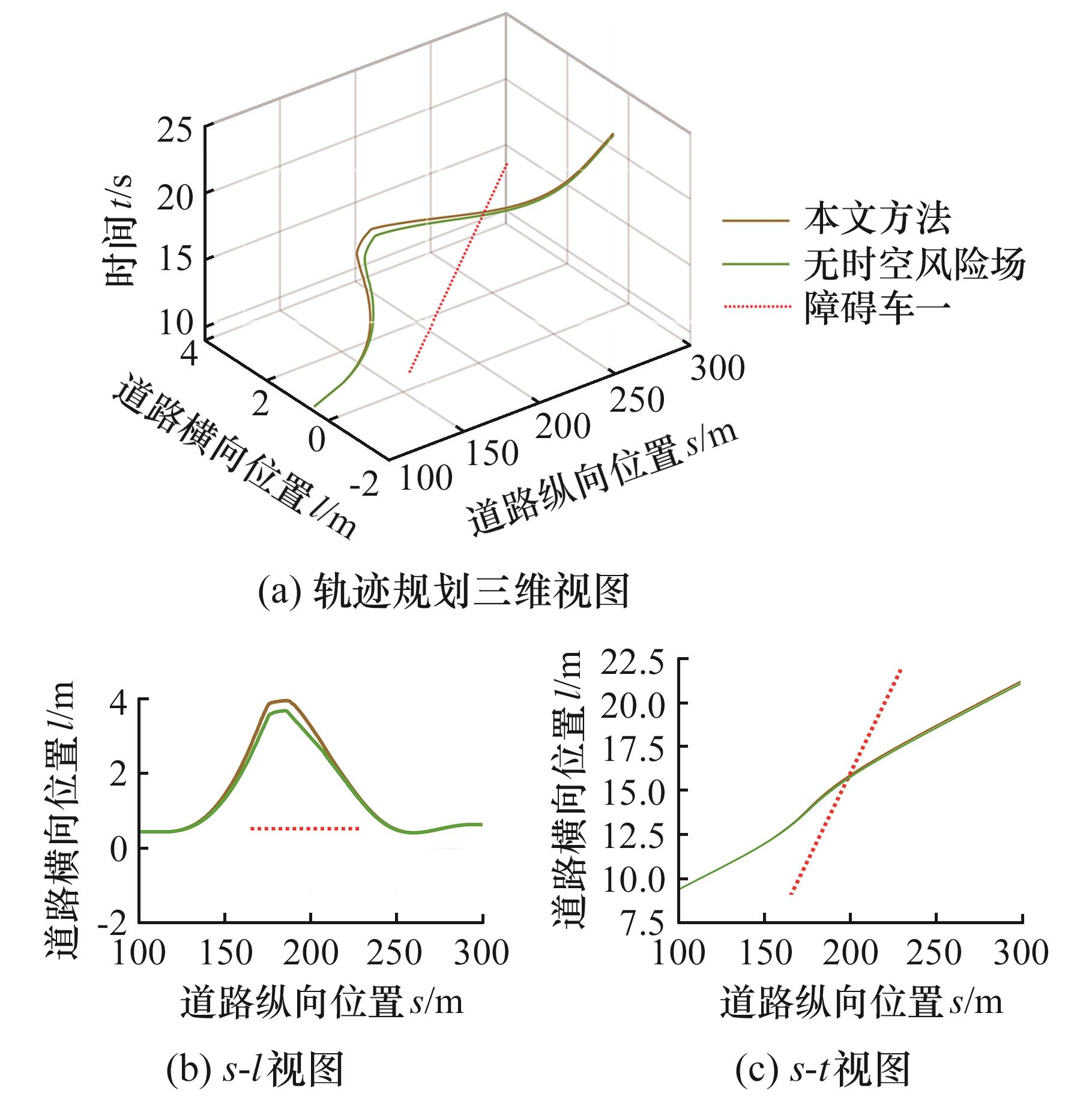
Fig.13 Three-dimensional view, s-l view and s-t view of trajectory planning(scene 1)
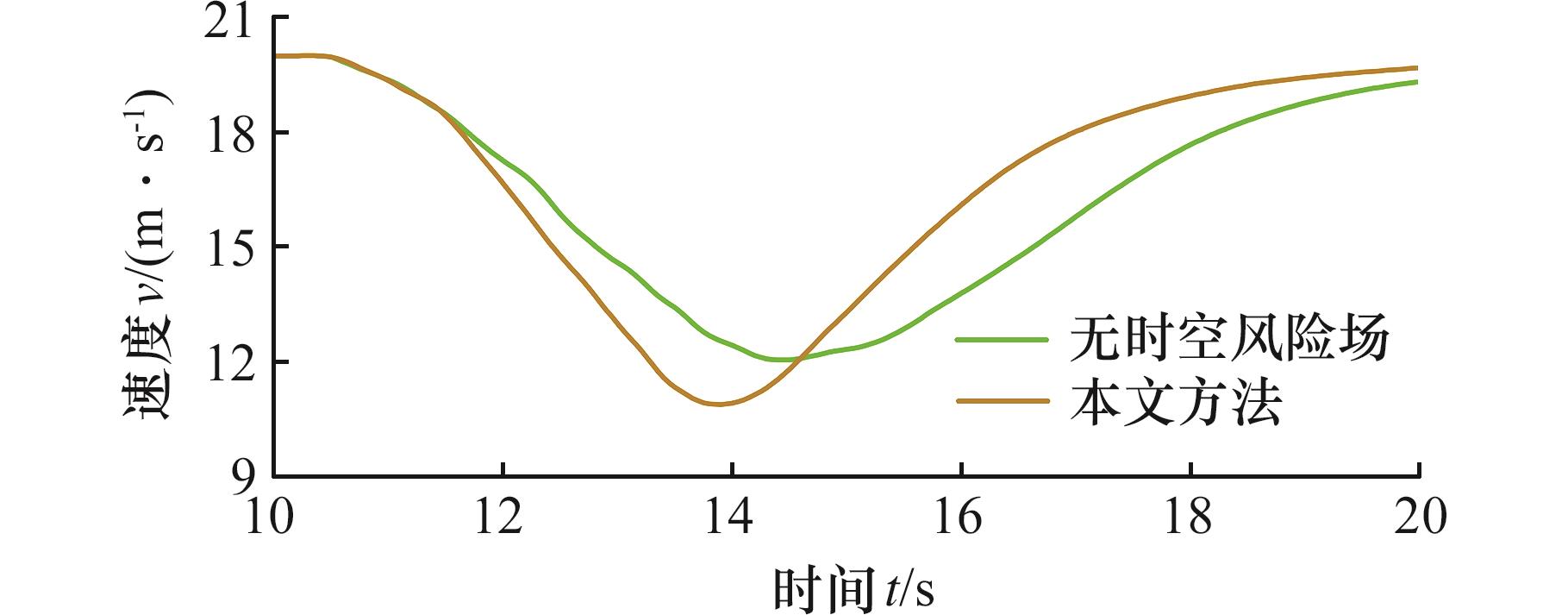
Fig.14 Velocity result curves(scene 1)
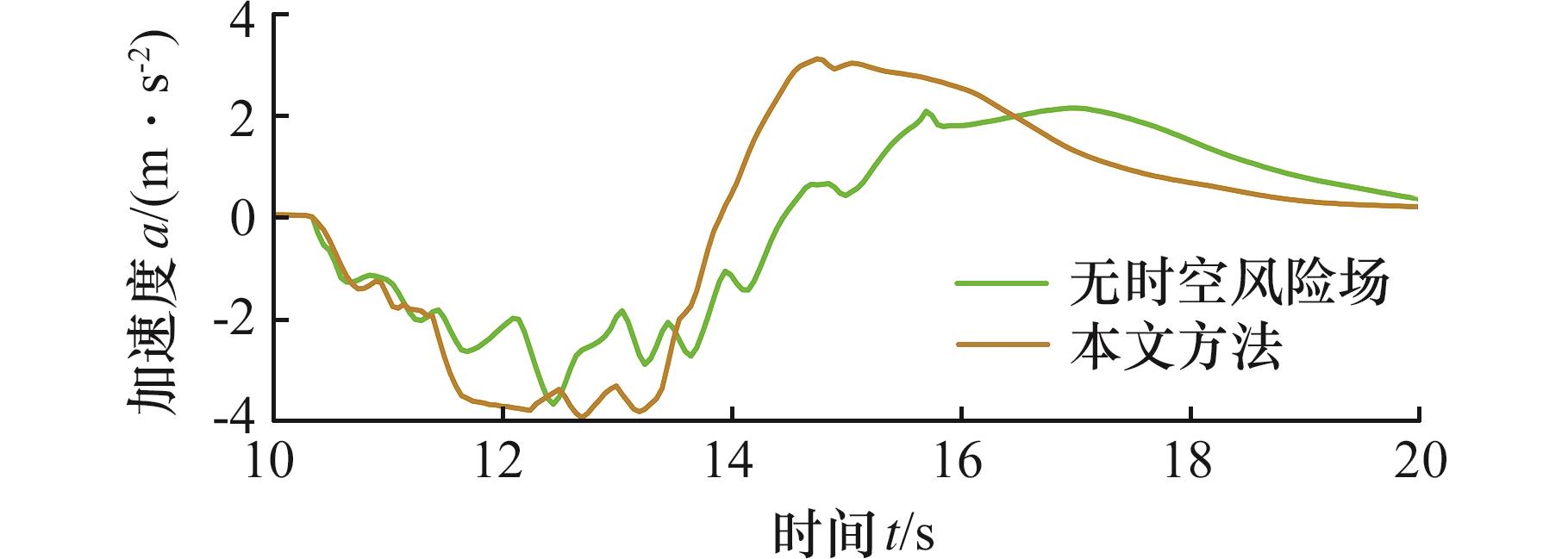
Fig.15 Acceleration result curves(scene 1)
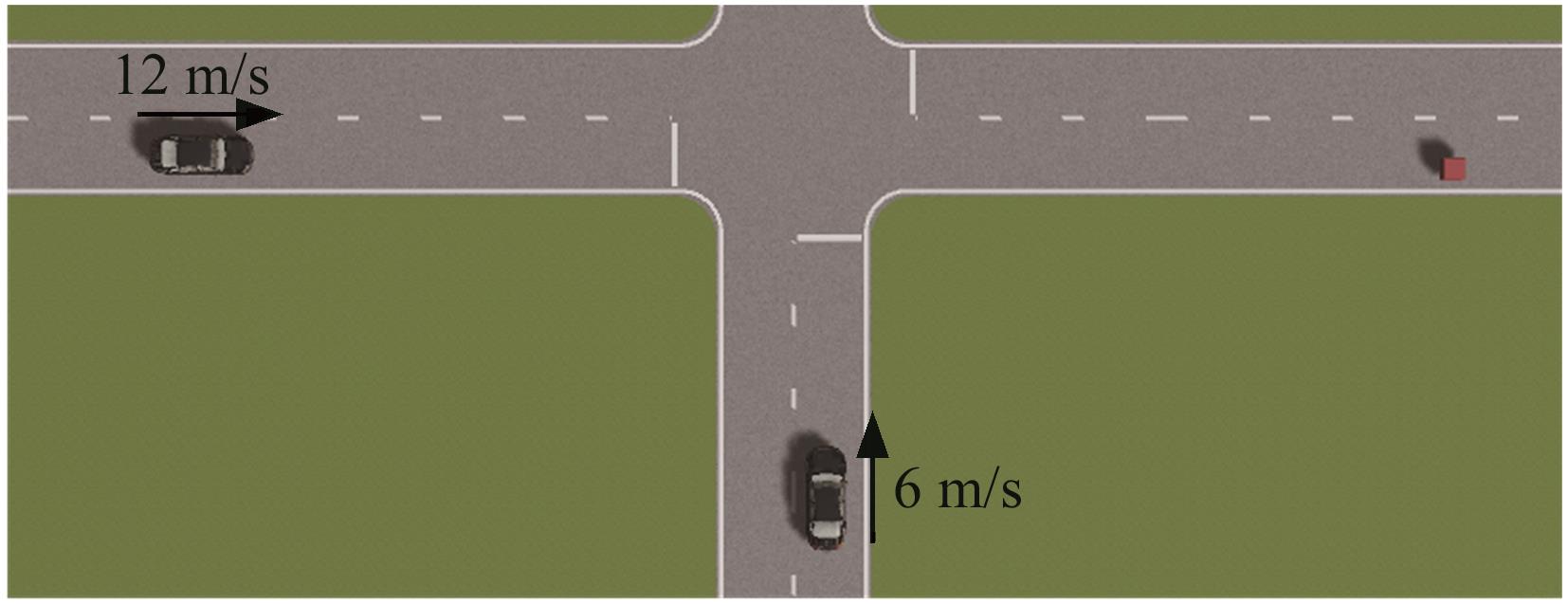
Fig.16 Driving scene at an intersection without traffic lights
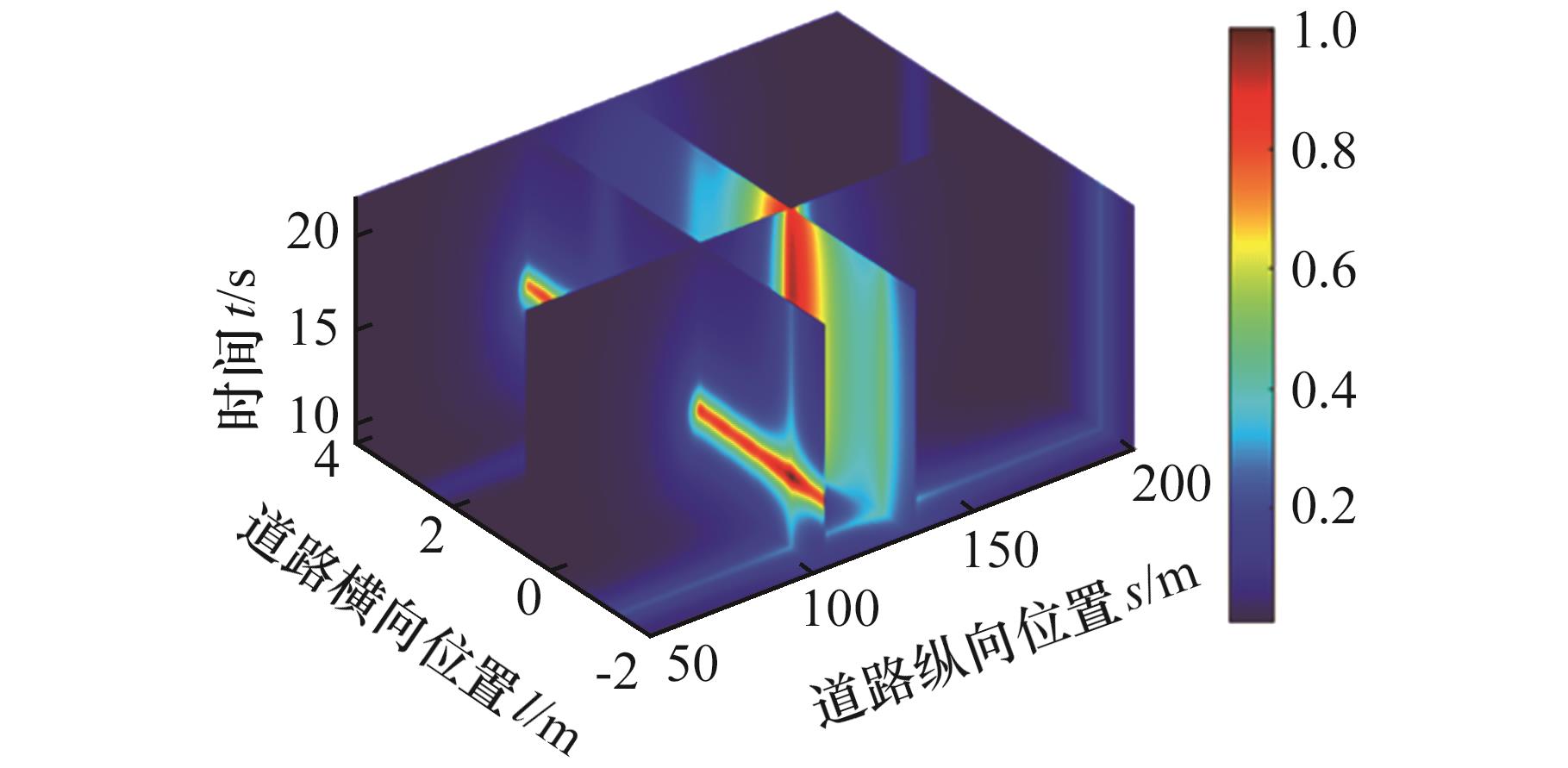
Fig.17 Spatio-temporal risk distribution of intersection scenes
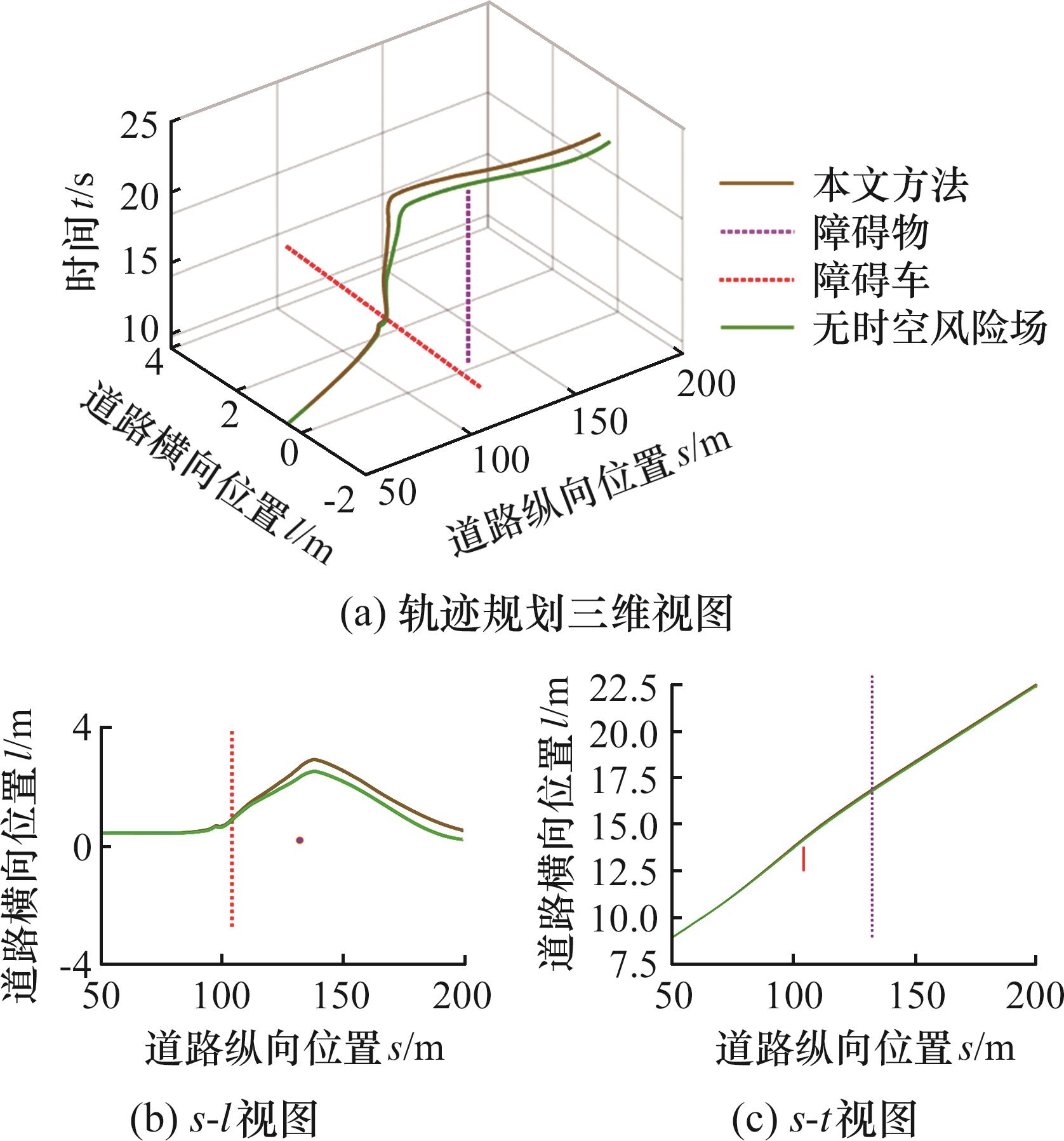
Fig.18 Three-dimensional view, s-l view and s-t view of trajectory planning(scene 2)
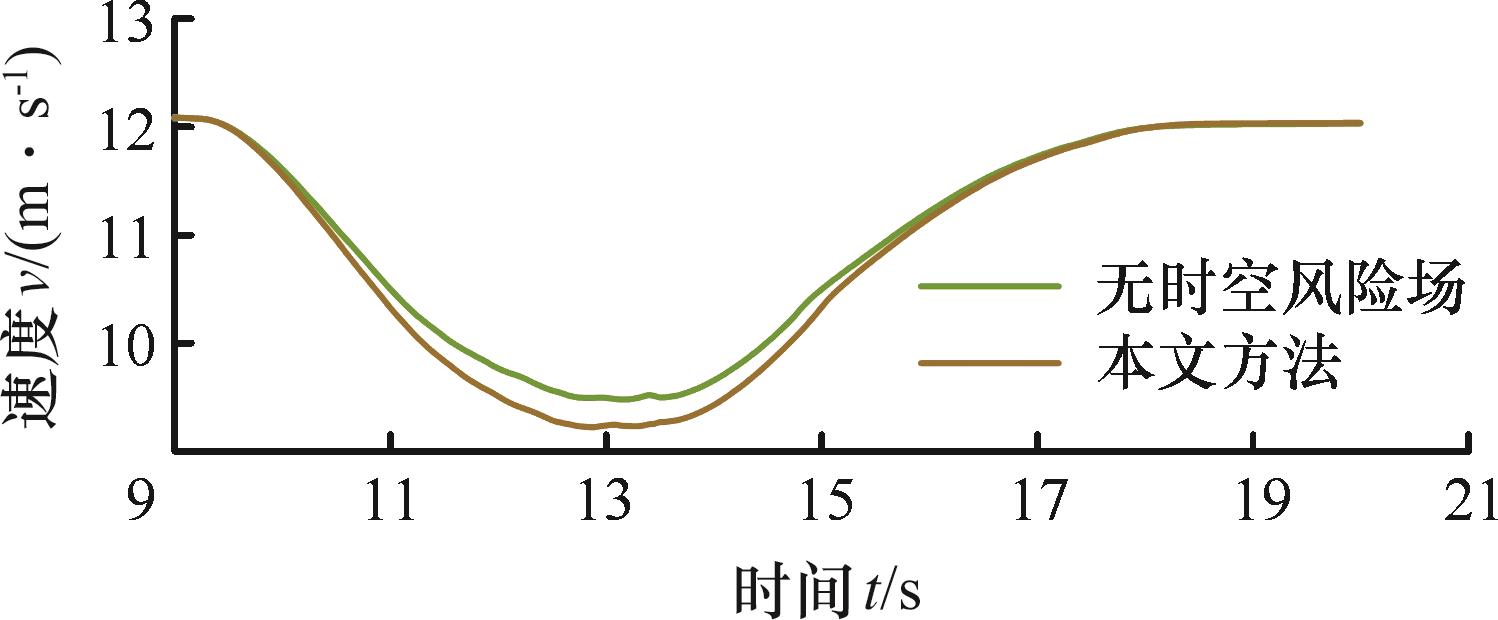
Fig.19 Velocity result curves(scene 2)
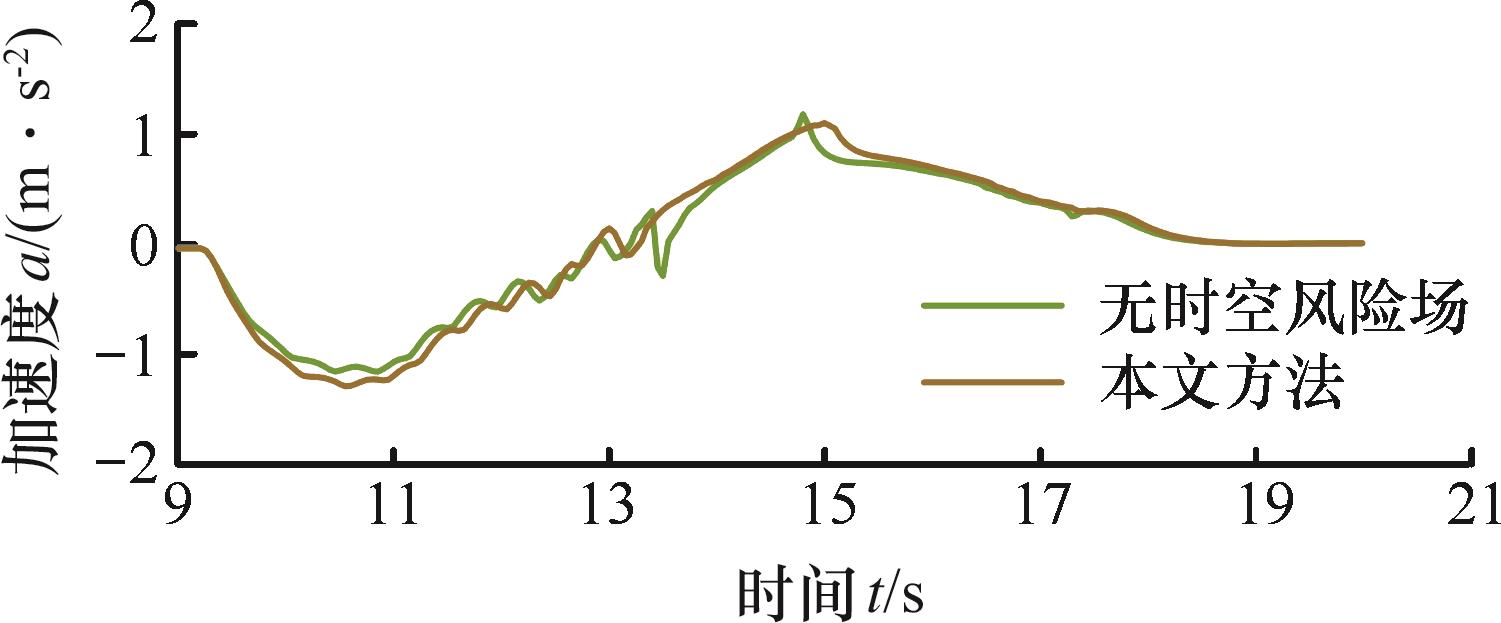
Fig.20 Acceleration result curves(scene 2)
| [1] | 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2023[J]. 中国公路学报, 2023, 36(11):1-192. |
| Editorial Department of China Journal of Highway and Transport. Review on China's Automotive Engineering Research Progress:2023[J]. China Journal of Highway and Transport, 2023, 36(11):1-192. | |
| [2] | WANG Zhaojie, LU Guangquan, TAN Haitian, et al. A Risk-field Based Motion Planning Method for Multi-vehicle Conflict Scenario[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1):310-322. |
| [3] | KILICARSLAN M, ZHENG Jiangyu. Predict Vehicle Collision by TTC from Motion Using a Single Video Camera[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(2):522-533. |
| [4] | TYAGI I. Threat Assessment for Avoiding Collsions with Perpendicular Vehicles at Intersections[C]∥2021 IEEE International Conference on Electro Information Technology (EIT). Mt. Pleasant, 2021:184-187. |
| [5] | MANZINGER S, PEK C, ALTHOFF M. Using Reachable Sets for Trajectory Planning of Automated Vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(2):232-248. |
| [6] | ZHANG Lingtong, MA Yining, XING Xingyu, et al. Research on the Complexity Quantification Method of Driving Scenarios Based on Information Entropy[C]∥2021 IEEE International Intelligent Transportation Systems Conference (ITSC). Indianapolis, 2021:3476-3481. |
| [7] | 熊璐,吴建峰,邢星宇,等.自动驾驶汽车行驶风险评估方法综述[J].汽车工程学报, 2024, 14(5):745-759. |
| XIONG Lu, WU Jianfen, XING Xinyu, et al. A Survey of Driving Risk Assessment for Autonomous Vehicles [J]. Journal of Automotive Engineering, 2024, 14(5):745-759. | |
| [8] | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1):105-114. |
| WANG Jianqiang, WU Jian, LI Yang. Concept, Principle and Modeling of Driving Risk Field Based on Driver-Vehicle-Road Interaction[J]. China Journal of Highway and Transport, 2016, 29(1):105-114. | |
| [9] | LI Linheng, GAN Jing, YI Ziwei, et al. Risk Perception and the Warning Strategy Based on Safety Potential Field Theory[J]. Accident Analysis & Prevention, 2020, 148:105805. |
| [10] | 马艳丽, 秦钦, 董方琦, 等. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1):9-17. |
| MA Yanli, QIN Qin, DONG Fangqi, et al. Takeover Risk Assessment Model Based on Risk Field Theory under Different Cognitive Secondary Tasks[J]. Automotive Engineering, 2024, 46(1):9-17. | |
| [11] | 褚端峰,彭赛骞,胡海洋,等.预见性驾驶风险场模型[J]. 机械工程学报, 2024, 60(10):160-170. |
| CHU Duanfeng, PENG Saiqian, HU Haiyang, et al. Predictive Driving Risk Field Model [J]. Chinese Journal of Mechanical Engineering, 2024, 60(10):160-170.. | |
| [12] | 张志文, 刘伯威, 张继园, 等. 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划[J]. 中国机械工程, 2024, 35(6):993-999. |
| ZHANG Zhiwen, LIU Bowei, ZHANG Jiyuan, et al. Cooperative Optimization of Intelligent Vehicle Path Planning Based on PSO-SSA and RRT[J]. China Mechanical Engineering, 2024, 35(6):993-999. | |
| [13] | 杨超, 杨帆, 王伟达, 等. 基于时空风险的智能驾驶车辆避险决策规划[J]. 汽车工程, 2024, 46(6):975-984. |
| YANG Chao, YANG Fan, WANG Weida, et al. Risk Avoidance Decision Planning for Intelligent Driving Vehicles Based on Spatiotemporal Risk[J]. Automotive Engineering, 2024, 46(6):975-984. | |
| [14] | KIM D, KIM H, HUH K. Local Trajectory Planning and Control for Autonomous Vehicles Using the Adaptive Potential Field[C]∥2017 IEEE Conference on Control Technology and Applications (CCTA). Hawaii, 2017:987-993. |
| [15] | HUANG Yanjun, DING Haitao, ZHANG Yubiao, et al. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field Elaborated Resistance Network Approach[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2):1376-1386. |
| [16] | 王明强, 王震坡, 张雷. 基于碰撞风险评估的智能汽车局部路径规划方法研究[J]. 机械工程学报, 2021, 57(10):28-41. |
| WANG Mingqiang, WANG Zhenpo, ZHANG Lei. Local Path Planning for Intelligent Vehicles Based on Collision Risk Evaluation[J]. Journal of Mechanical Engineering, 2021, 57(10):28-41. | |
| [17] | WANG Mingqiang, ZHANG Lei, ZHANG Zhiqiang, et al. A Hybrid Trajectory Planning Strategy for Intelligent Vehicles in On-road Dynamic Scenarios[J]. IEEE Transactions on Vehicular Technology, 2023, 72(3):2832-2847. |
| [18] | 韩嘉懿. 基于驾驶人行为理解的智能汽车人机触觉交互协同转向控制研究[D]. 长春:吉林大学, 2022. |
| HAN Jiayi. Research on Human-Machine Haptic Interactive Shared Steering Control Based on Driver Behavior Understanding for Intelligent Vehicle [D]. Changchun:Jilin University, 2022. | |
| [19] | 王安杰, 郑玲, 李以农, 等. 基于预测风险场的智能汽车主动避撞运动规划[J]. 汽车工程, 2021, 43(7):1096-1104. |
| WANG Anjie, ZHENG Ling, LI Yinong, et al. Motion Planning for Active Collision Avoidance of Intelligent Vehicles Based on Predictive Risk Field[J]. Automotive Engineering, 2021, 43(7):1096-1104. |
| [1] | ZHAO Dingxuan, GUO Rui, WANG Shuo, YAN Changchang, WANG Zihe, ZHANG Tianci. Body Posture Planning Method for Unmanned Walking Excavators under Complex Terrain Environments [J]. China Mechanical Engineering, 2026, 37(1): 233-242. |
| [2] | Jianlin LIU, Haisong HUANG, Qingsong FAN, Chi MA, Langlang ZHANG. Multi-objective Trajectory Planning of Manipulators Based on Improved SSA [J]. China Mechanical Engineering, 2025, 36(09): 2047-2056. |
| [3] | HE Yang, LI Gang, YU Xiaonan. Research on Fuzzy Model Predictive Control Method for High Speed Intelligent Vehicles Based on Variable Universe [J]. China Mechanical Engineering, 2025, 36(03): 604-613. |
| [4] | WANG Zhiqiang1, HAN Jianhai1, 2, 3, LI Xiangpan1, 2, GUO Bingjing1, 2, DU Ganqin4. Cartesian Space Screw Linear Interpolation Trajectory Planning for Redundant Robots [J]. China Mechanical Engineering, 2025, 36(01): 104-112. |
| [5] | RONG Yu, CHEN Gang, DOU Tianci, . A Multi Index Comprehensive Optimal Anti Impact Trajectory Planning Method [J]. China Mechanical Engineering, 2024, 35(02): 305-316. |
| [6] | WU Chaoqun, ZHAO Song, LEI Ting. Robot Welding Trajectory Planning and High Frequency Control for Curved Seams [J]. China Mechanical Engineering, 2023, 34(14): 1723-1728. |
| [7] | ZHANG Rongshen, WANG Yutian, HU Rongquan, YANG Lingfang, HUANG Zhi. Avoidance Planning for Intelligent Vehicles in Dilemma Based on Nominal Cost [J]. China Mechanical Engineering, 2022, 33(15): 1849-1856. |
| [8] | SUN Xiaojun, SONG Daiping, LIN Jingzhou, HAN Weihang. Research and Implementation of Trajectory Planning Algorithm for Attacking Robots on Wind Tunnel [J]. China Mechanical Engineering, 2021, 32(16): 1963-1971. |
| [9] |
LI Maoyue;LYU Hongyu;WANG Fei;JIA Dongkai.
An Intelligent Vehicle Robust Lane Line Identification Method Based on Machine Vision
[J]. China Mechanical Engineering, 2021, 32(02): 242-251.
|
| [10] | LIU Zhiqiang1;GU Xianan1;GUO Hao1;XI Hao1;WANG Mingqiang1;LI Junli2. A Trajectory Planning Method for Automatic Placement of Carbon n Fiber Screw Propellers [J]. China Mechanical Engineering, 2020, 31(17): 2079-2084,2094. |
| [11] | CAI Yingfeng1;LI Jian2;SUN Xiaoqiang1;CHEN Long1;JIANG Haobing2;HE Youguo1;CHEN Xiaobo1 . Research on Hybrid Control Strategy for Intelligent Vehicle Path Tracking [J]. China Mechanical Engineering, 2020, 31(03): 289-298. |
| [12] | QIU Shaolin;QIAN Lijun;LU Jianhui. Lane-change Control for Intelligent Vehicles Based on Optimal Preview [J]. China Mechanical Engineering, 2019, 30(23): 2778-2783. |
| [13] | LIU Jicheng;JI Hongchao. Gait Planning Strategy for a New Type of Wheel-legged Robot [J]. China Mechanical Engineering, 2019, 30(18): 2257-2262. |
| [14] | DIAO Qinqing;ZHANG Yani;ZHU Lingyun. A Lateral and Longitudinal Fuzzy Control of Intelligent Vehicles with Double Preview Points for Large Curvature Roads [J]. China Mechanical Engineering, 2019, 30(12): 1445-1452. |
| [15] | CHEN Jie;DONG Wei;SHENG Xinjun;ZHU Xiangyang. Regional Trajectory Planning of Unmanned Aerial Vehicles Based on Spiral Spline [J]. China Mechanical Engineering, 2019, 30(12): 1453-1459. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||