ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (5): 1095-1104.DOI: 10.3969/j.issn.1004-132X.2026.05.009
• 机械基础工程 • 上一篇
穆俊齐1,2,3( ), 魏奕扬1,2,3, 侯旭萍1,2,3, 宗小峰1,2,3()
), 魏奕扬1,2,3, 侯旭萍1,2,3, 宗小峰1,2,3()
MU Junqi1,2,3(), WEI Yiyang1,2,3, HOU Xuping1,2,3, ZONG Xiaofeng1,2,3()
摘要:
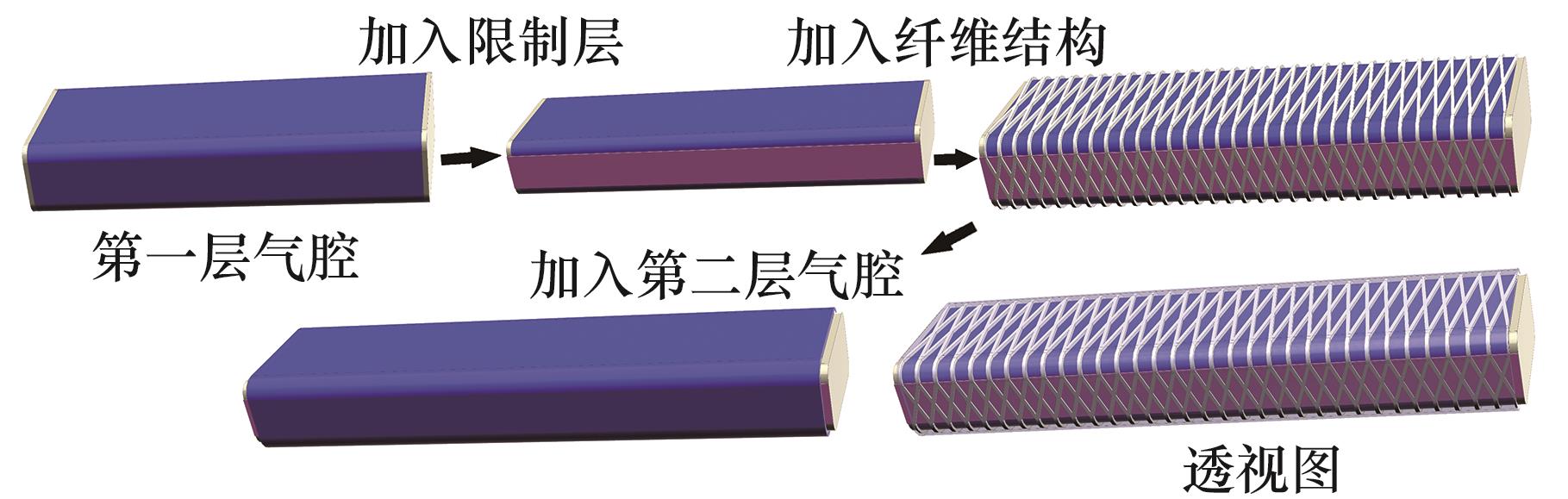
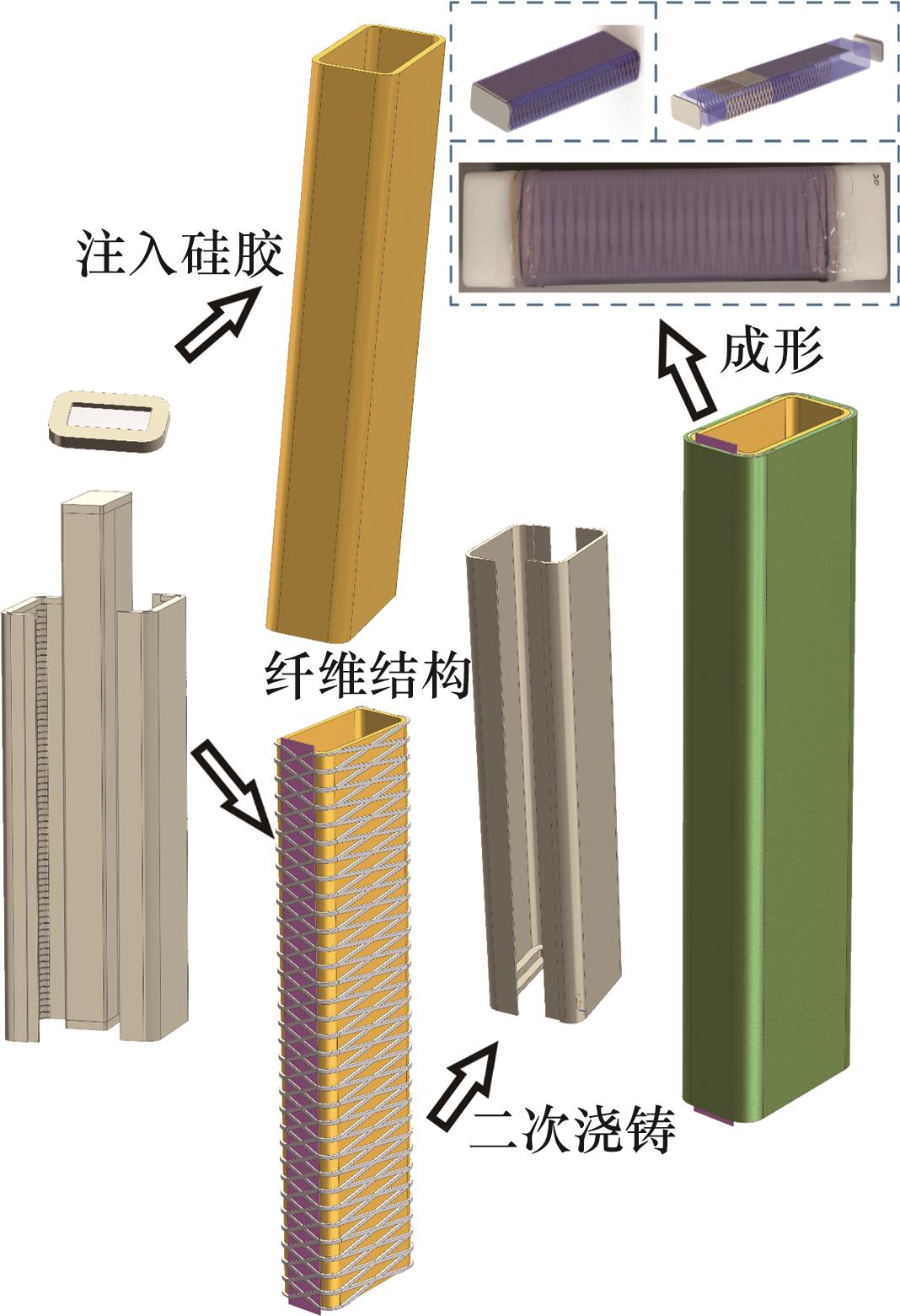
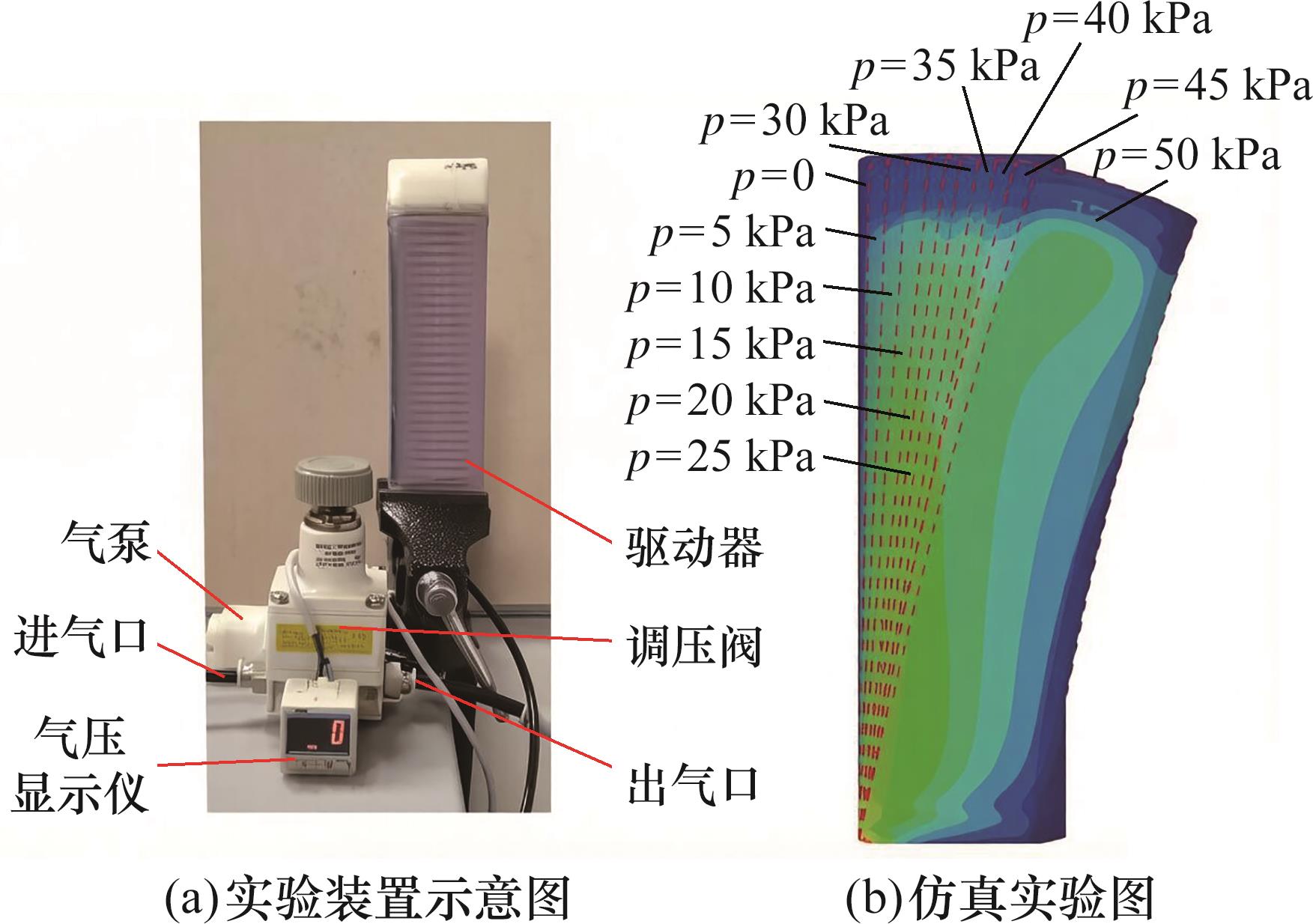
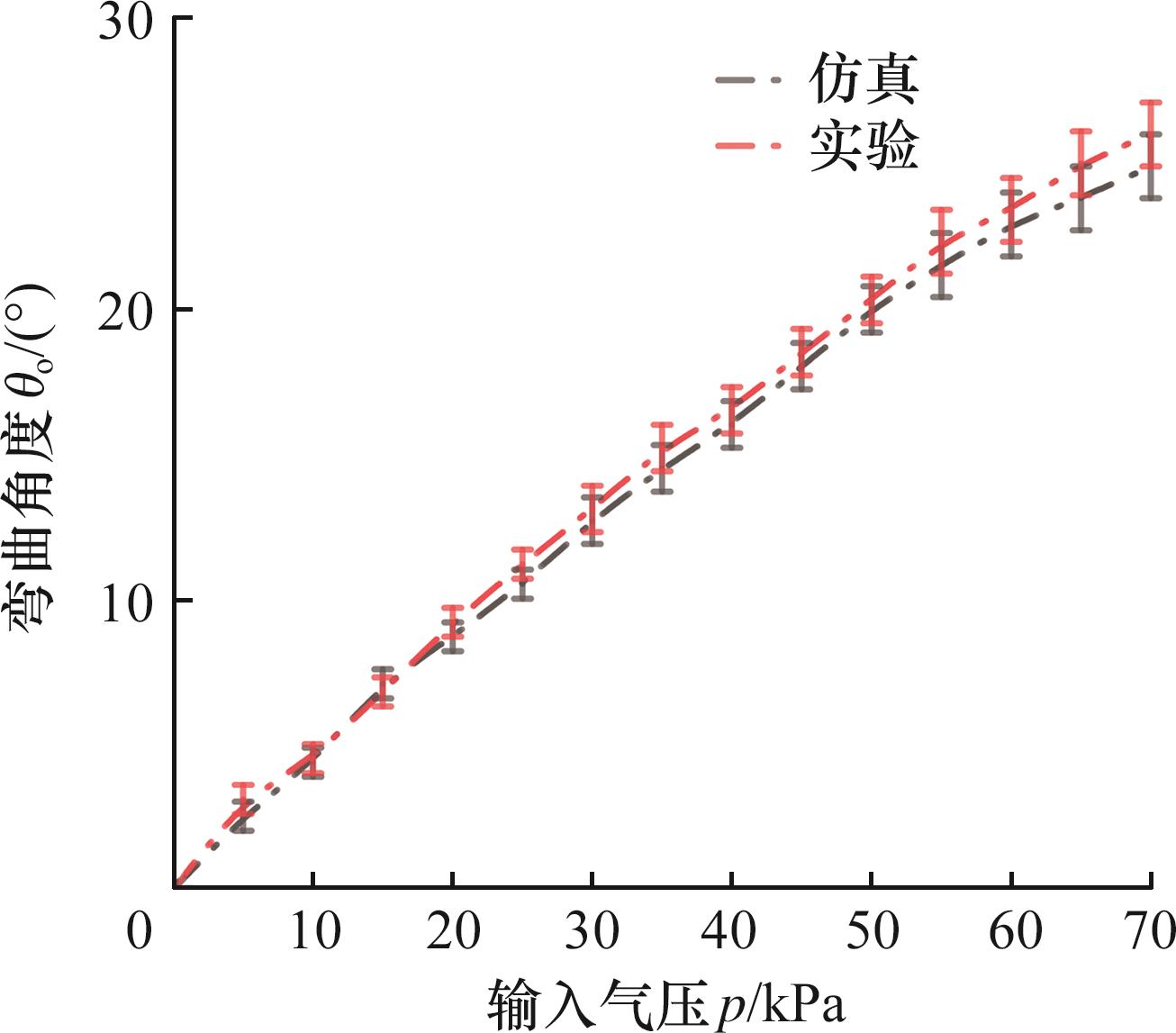
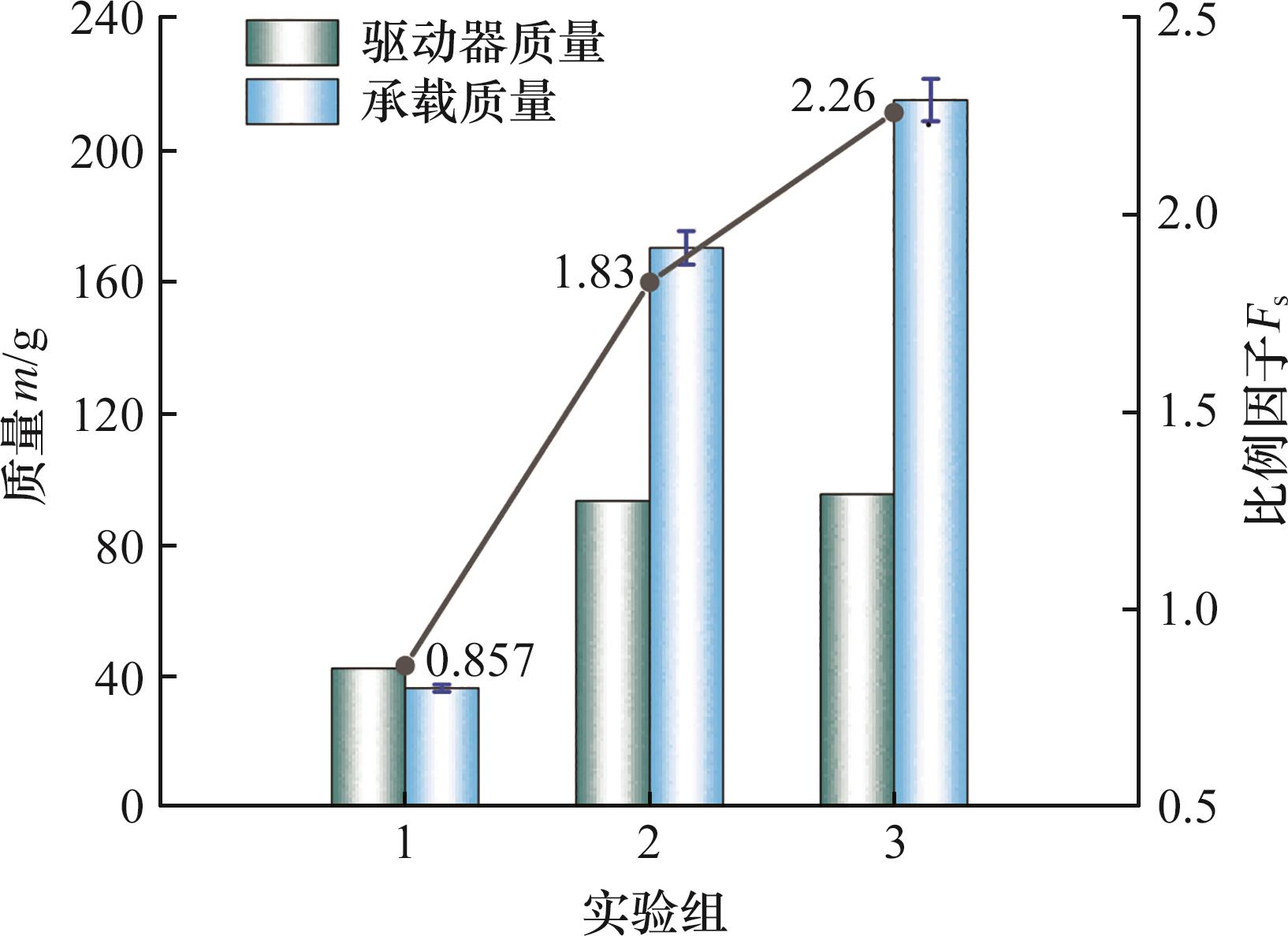
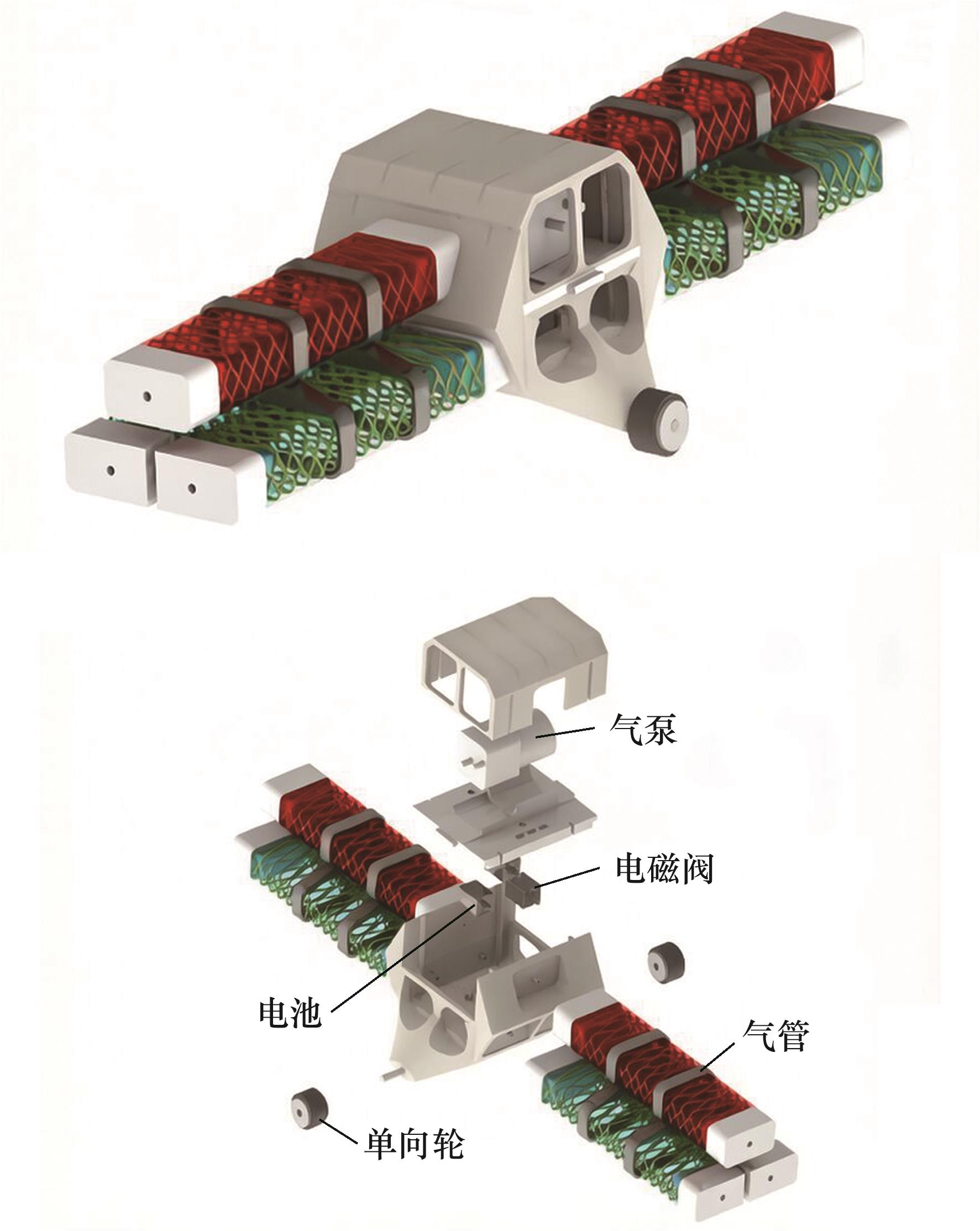
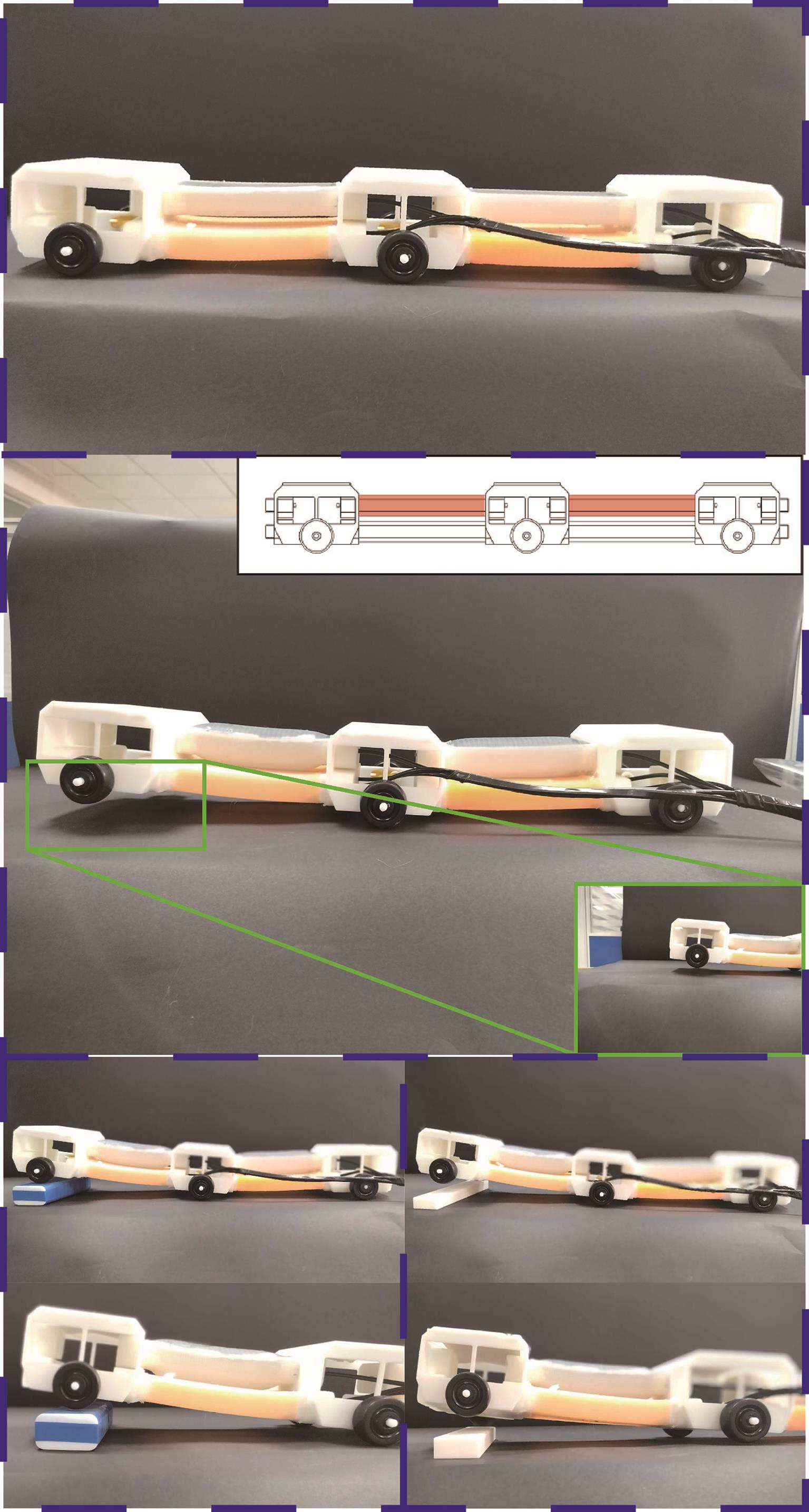
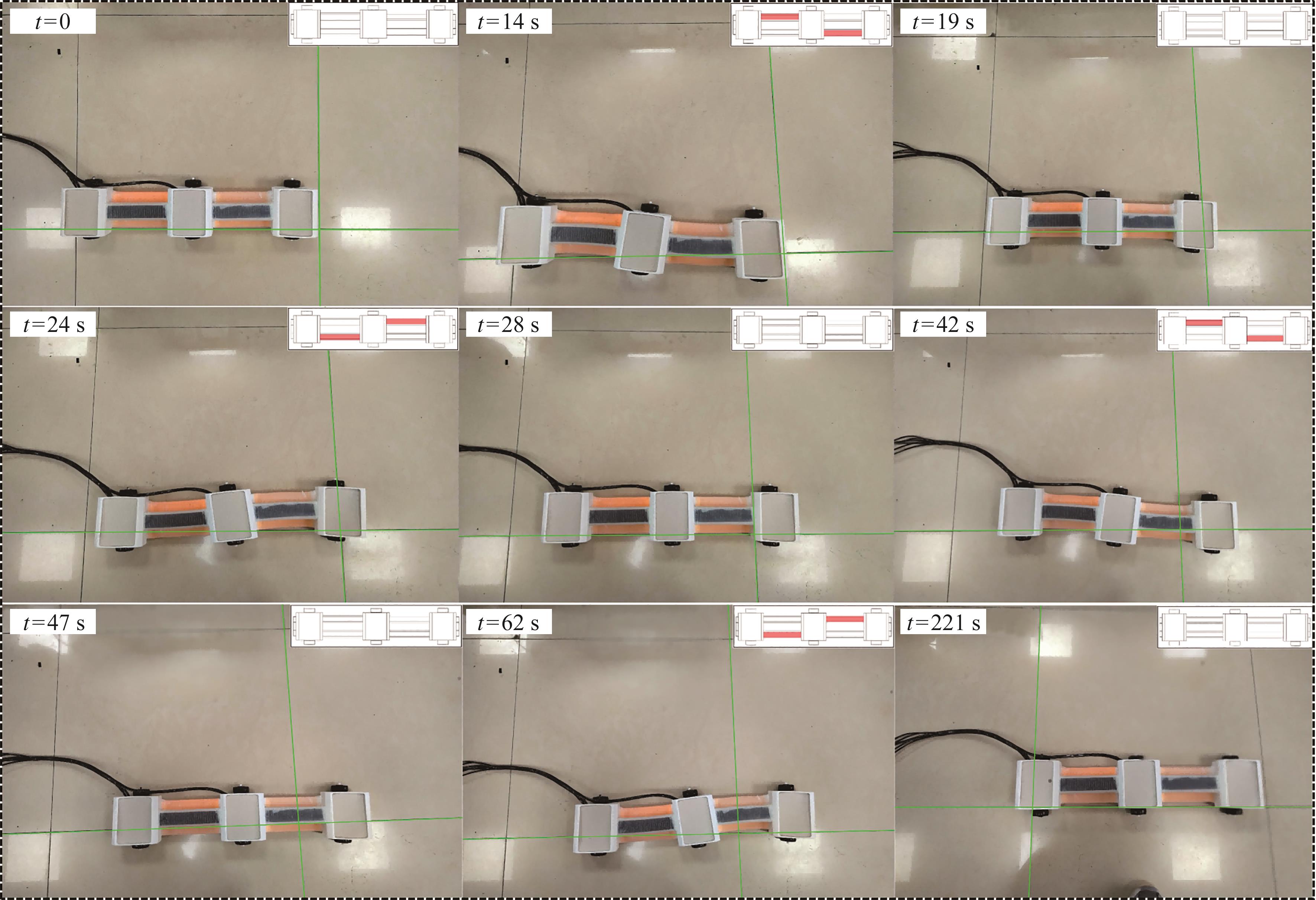
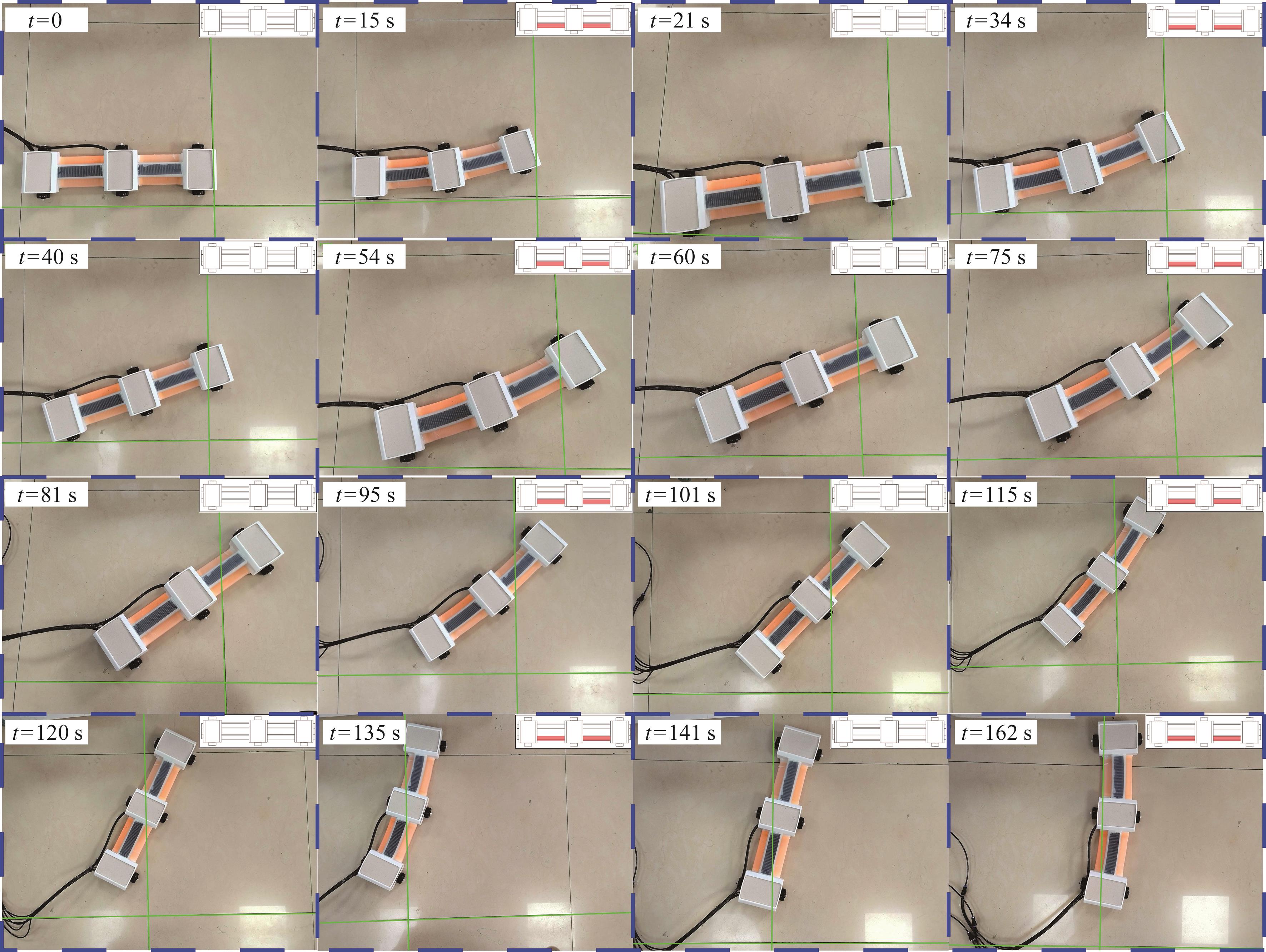
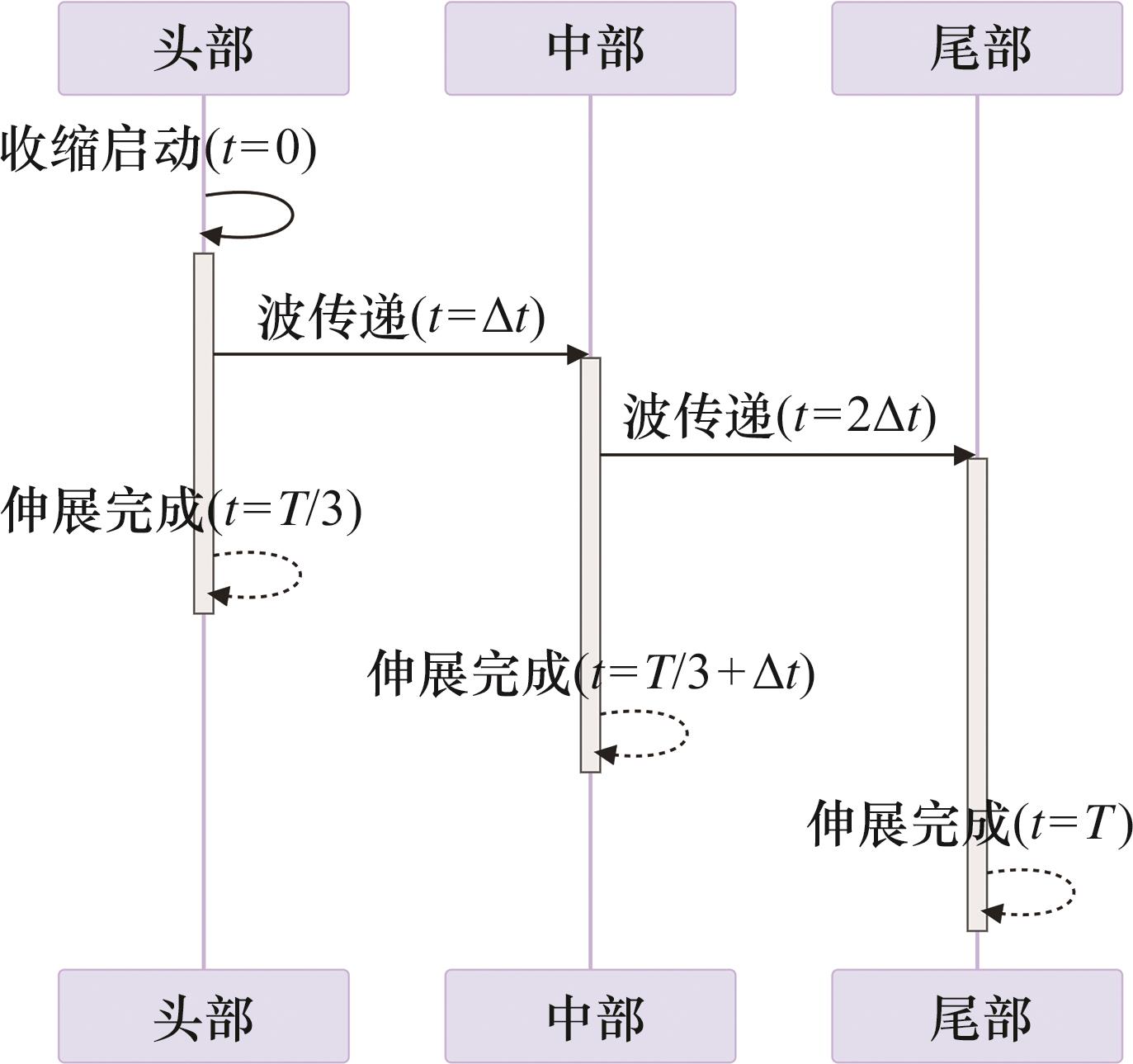
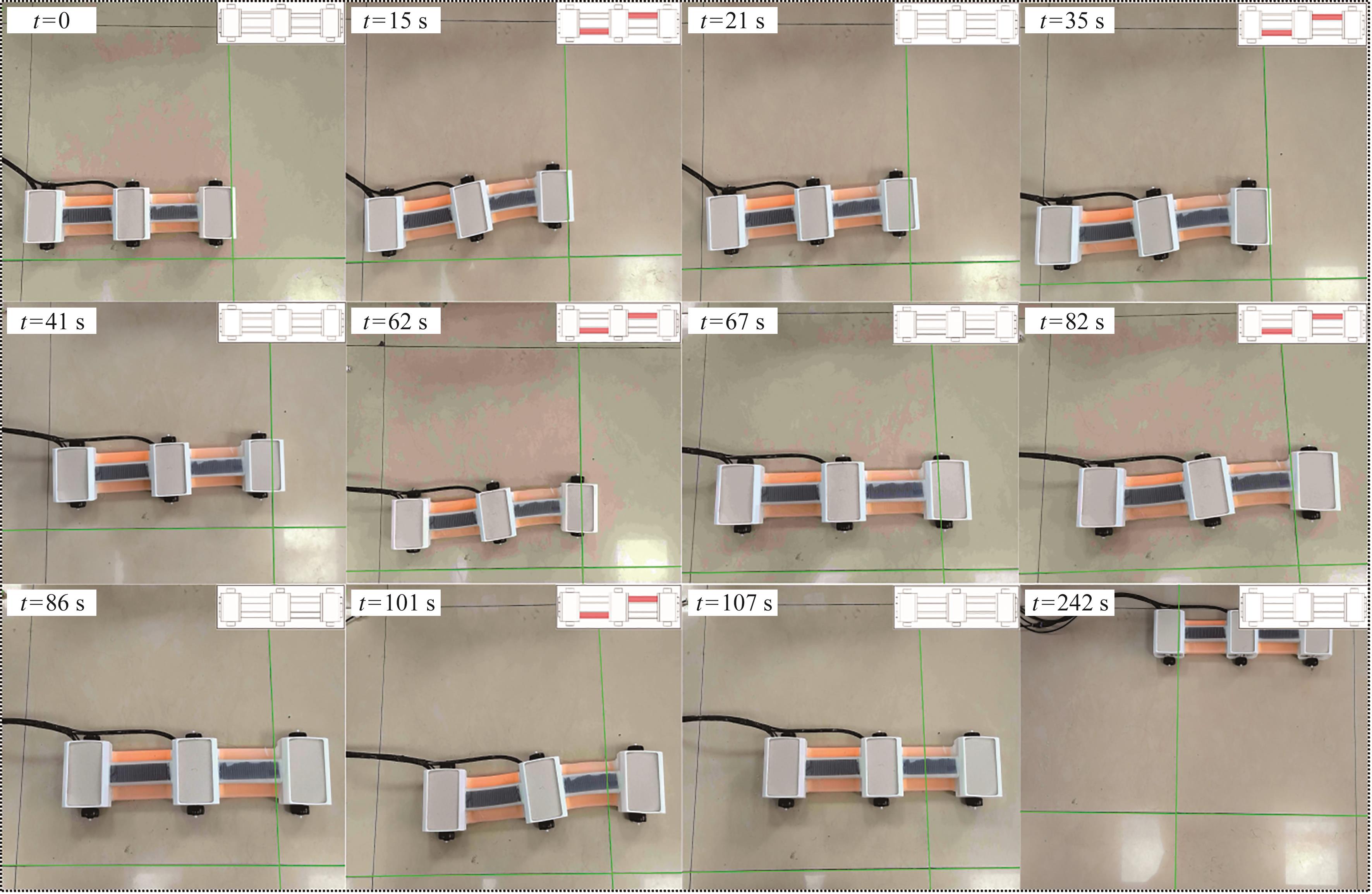
针对轮式蛇形机器人在复杂地形中易翻倒、适应性不强的问题,提出了一种基于纤维干扰变刚度原理的多步态气动蛇形机器人。该机器人气腔采用三层结构气动驱动器,通过气压调控实现刚度动态调整,并结合模块化设计集成气泵、电磁阀及单向轮等组件。实验结果表明,驱动器弯曲角度与气压成正相关,双层气腔结合纤维增强的设计使承载能力显著提高。通过协调转向与承载驱动器,机器人可完成蛇形直线运动、C形转角运动及手风琴型运动,并跨越自身高度三分之一的障碍物。模块化结构降低了维护成本,支持快速功能扩展。研究结果为轮式软体蛇形机器人提供了高效驱动方案,为其在救援、管道检测等复杂场景的应用奠定基础。
中图分类号: