


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (1): 233-242.DOI: 10.3969/j.issn.1004-132X.2026.01.024
• 工程前沿 • 上一篇
赵丁选1( ), 郭瑞1,2, 王硕3, 闫长长1,2, 王子鹤1, 张天赐1,2()
), 郭瑞1,2, 王硕3, 闫长长1,2, 王子鹤1, 张天赐1,2()
收稿日期:2024-11-07
出版日期:2026-01-25
发布日期:2026-02-05
通讯作者:
张天赐
作者简介:赵丁选,男,1965年生,教授,博士研究生导师。研究方向为机械系统动力学及其仿真与控制。发表论文300余篇。E-mail: zdx@ysu.edu.cn基金资助:
ZHAO Dingxuan1(), GUO Rui1,2, WANG Shuo3, YAN Changchang1,2, WANG Zihe1, ZHANG Tianci1,2()
Received:2024-11-07
Online:2026-01-25
Published:2026-02-05
Contact:
ZHANG Tianci
摘要:
非结构化地形作业中,无人步履式挖掘机的姿态规划对底盘稳定性与作业安全起着至关重要的作用。针对车身姿态控制问题,提出一种基于多目标优化的姿态规划方法。建立底盘的七自由度运动学模型,并利用NURBS曲线生成步行腿轨迹。以姿态偏差和能耗为优化目标,构建融合地形约束的非线性多目标规划模型。数学-物理联合仿真及实车实验表明,所提方法可保证无人步履式挖掘机以良好的姿态穿越复杂地形。
中图分类号:
赵丁选, 郭瑞, 王硕, 闫长长, 王子鹤, 张天赐. 复杂地形环境下无人步履式挖掘机的车身姿态规划方法[J]. 中国机械工程, 2026, 37(1): 233-242.
ZHAO Dingxuan, GUO Rui, WANG Shuo, YAN Changchang, WANG Zihe, ZHANG Tianci. Body Posture Planning Method for Unmanned Walking Excavators under Complex Terrain Environments[J]. China Mechanical Engineering, 2026, 37(1): 233-242.
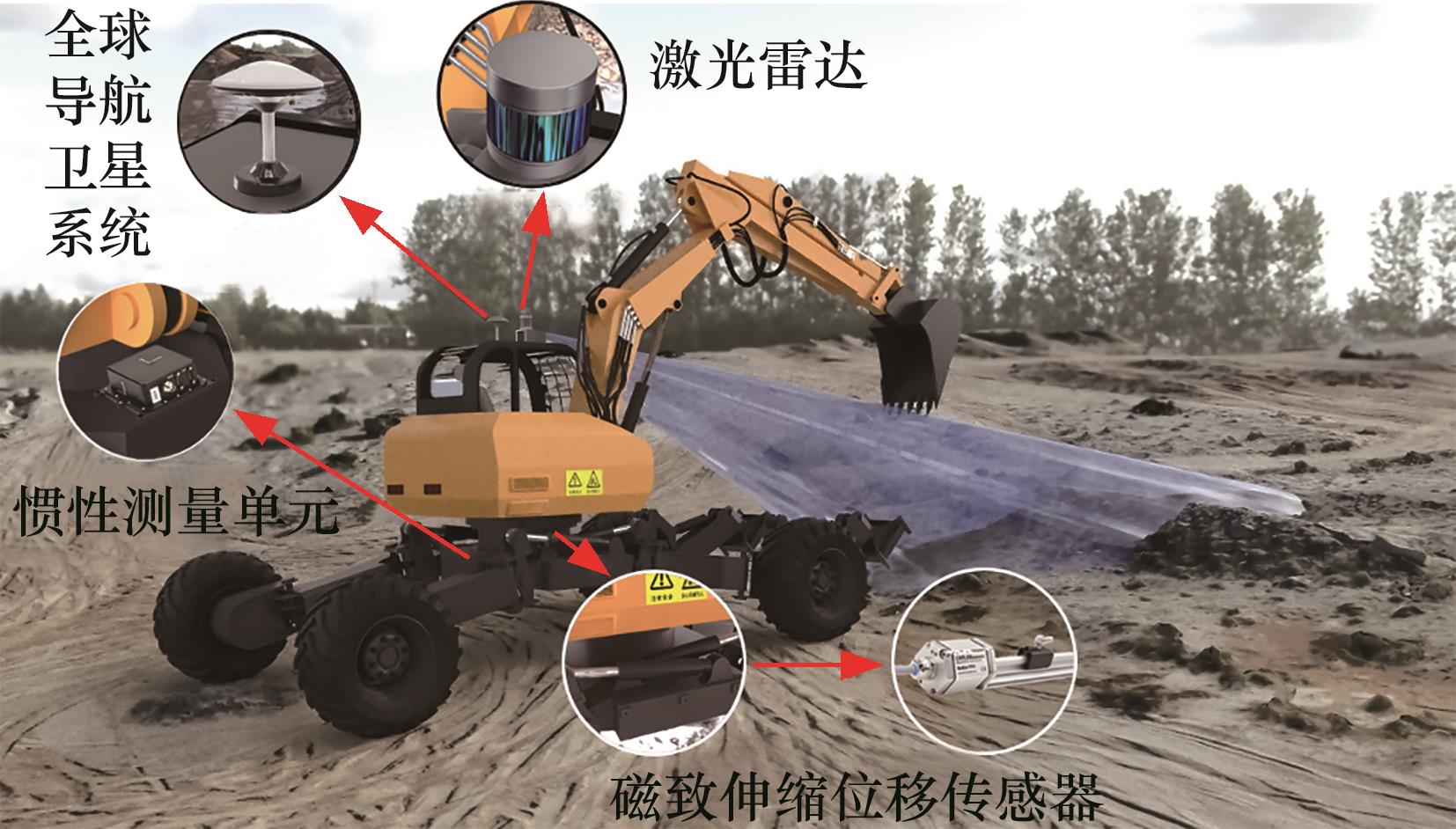
图1 UWE的典型框架
Fig.1 A typical framework of the UWE
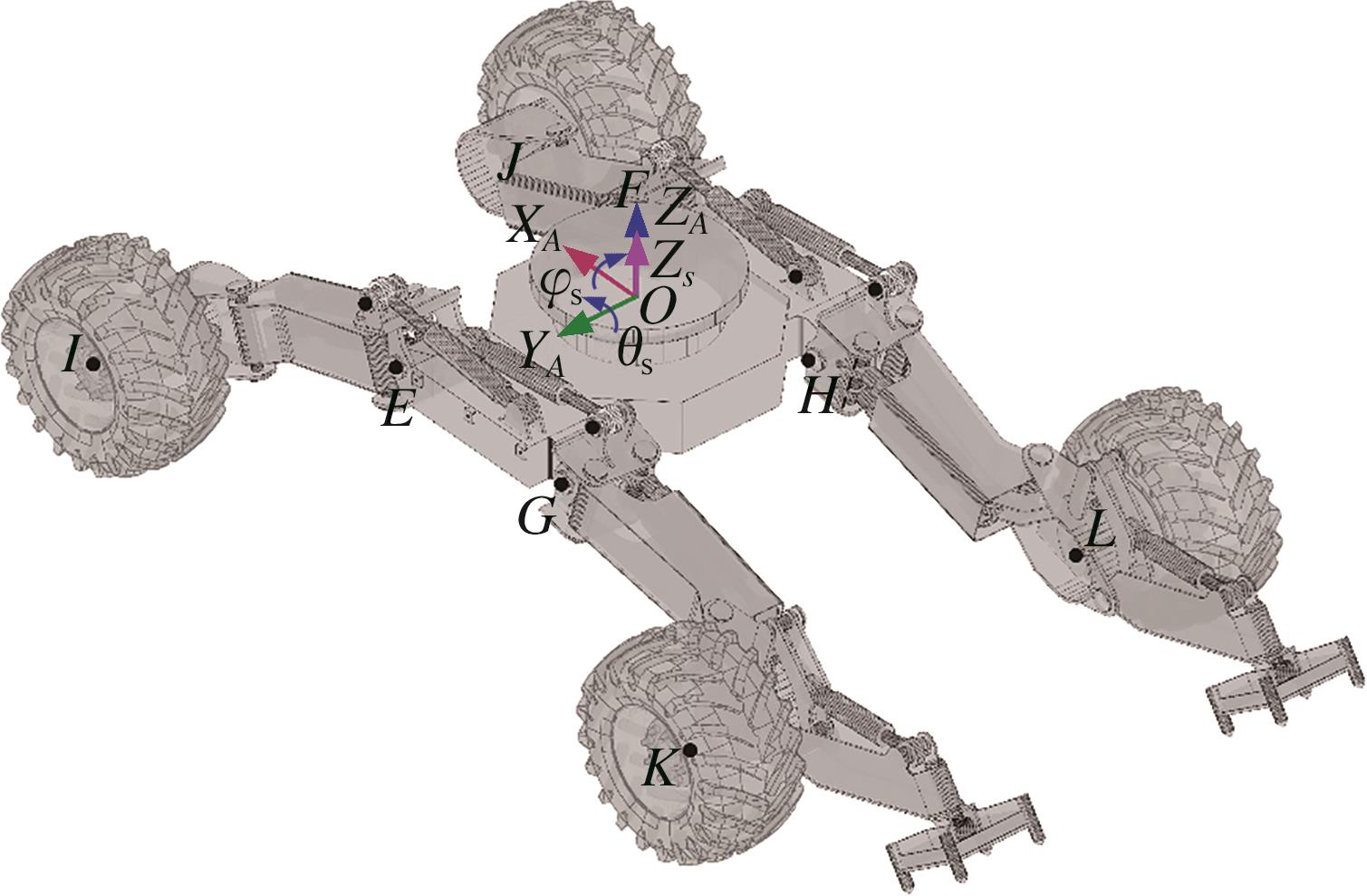
图2 UWE坐标系
Fig.2 Coordinate system of the UWE
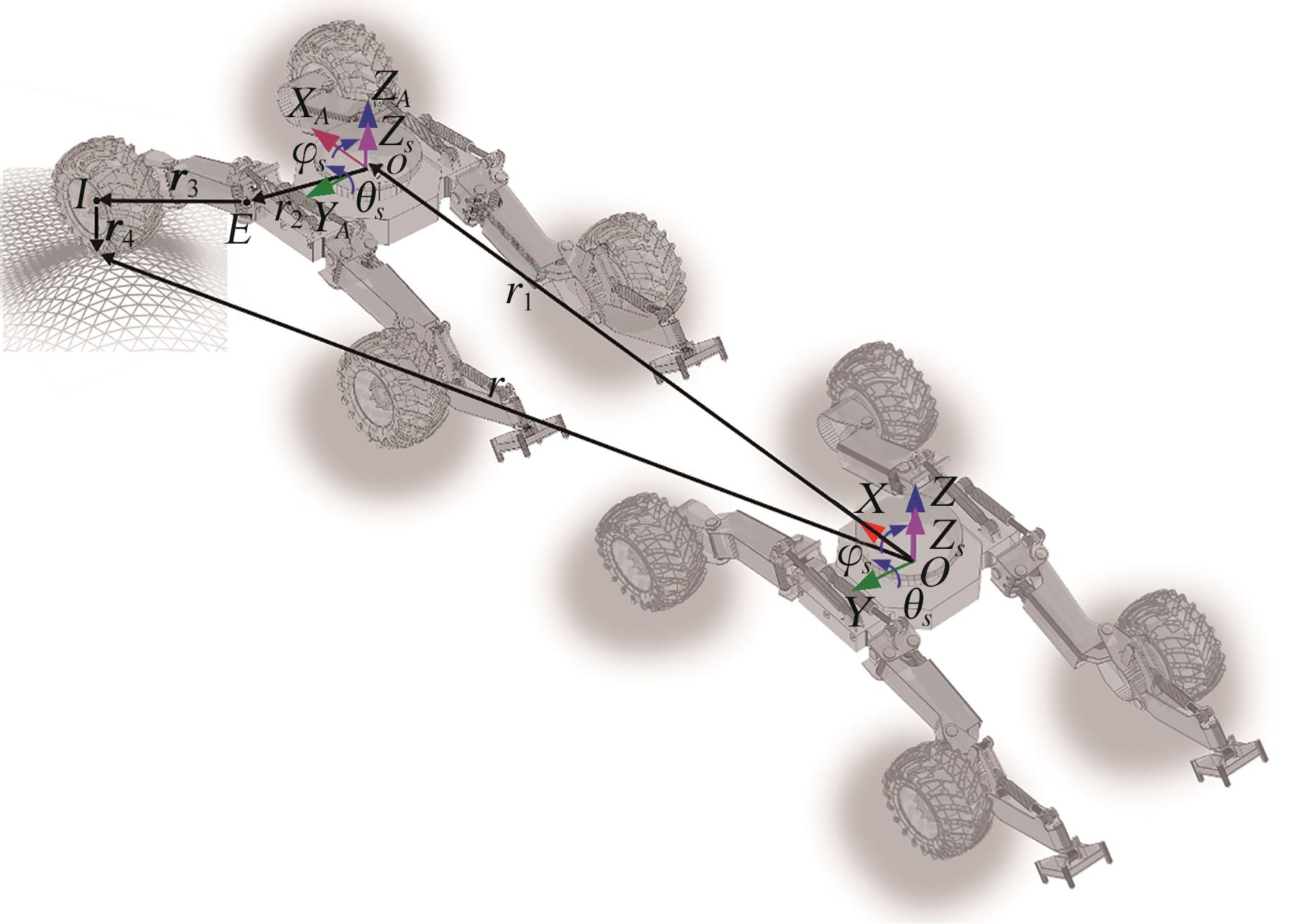
图3 七自由度UWE运动学模型
Fig.3 7-DoF kinematics model of the UWE
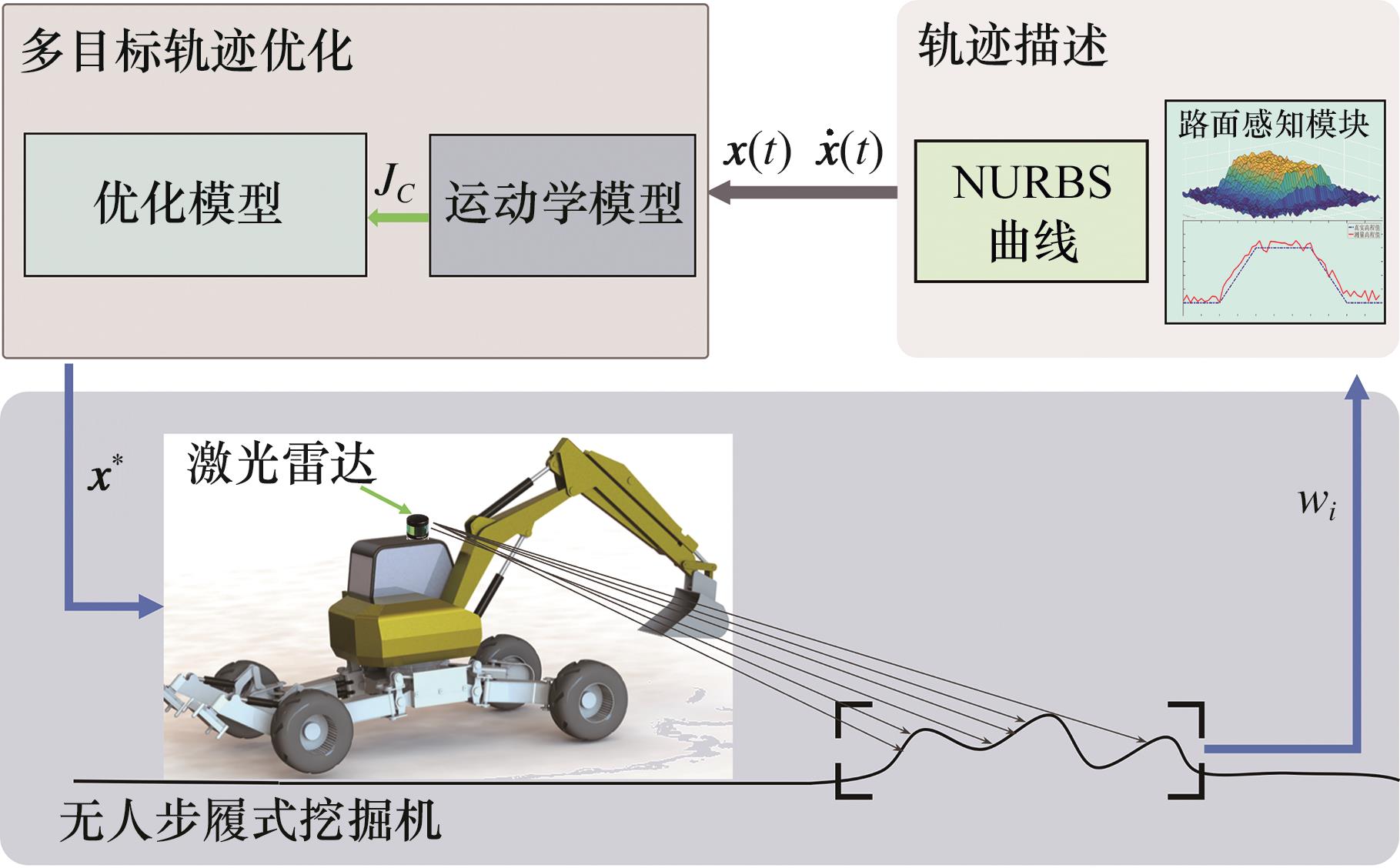
图4 优化流程示意图
Fig.4 Schematic diagram of optimization process
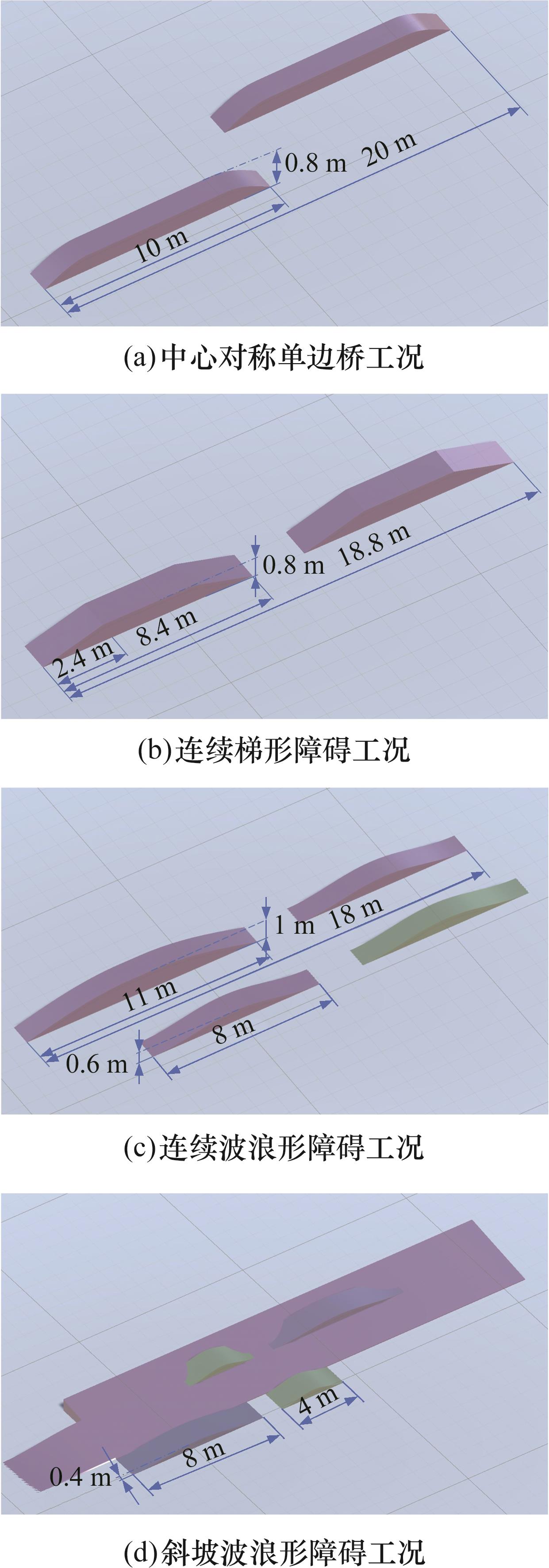
图5 四种典型障碍工况
Fig.5 Four typical obstacle conditions
| la | lb | lc | lleg | R |
|---|---|---|---|---|
| 0.50 | 0.78 | 3.01 | 1.66 | 0.60 |
表1 UWE的结构参数 (m)
Tab.1 Values of structure parameters of the UWE
| la | lb | lc | lleg | R |
|---|---|---|---|---|
| 0.50 | 0.78 | 3.01 | 1.66 | 0.60 |
| θ/(°) | vu/(m·s | θs/(°) | φs/(°) | |||
|---|---|---|---|---|---|---|
| 上限 | 25 | 0.08 | 0.1 | 3 | 3 | 0.3 |
| 下限 |
表2 约束条件的上下限
Tab.2 The upper and lower limits of the constraints
| θ/(°) | vu/(m·s | θs/(°) | φs/(°) | |||
|---|---|---|---|---|---|---|
| 上限 | 25 | 0.08 | 0.1 | 3 | 3 | 0.3 |
| 下限 |
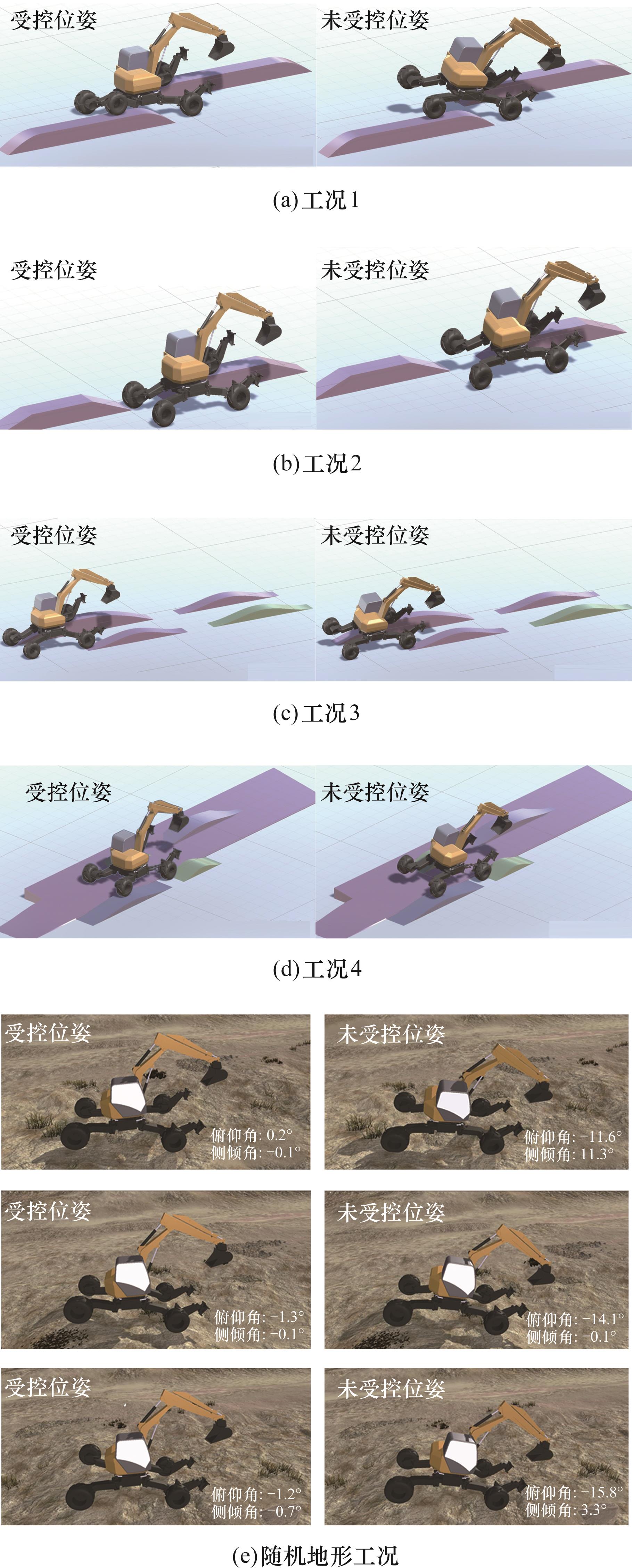
图6 受控与未受控运动过程对比
Fig.6 Comparison of the motion process of the controlled and uncontrolled
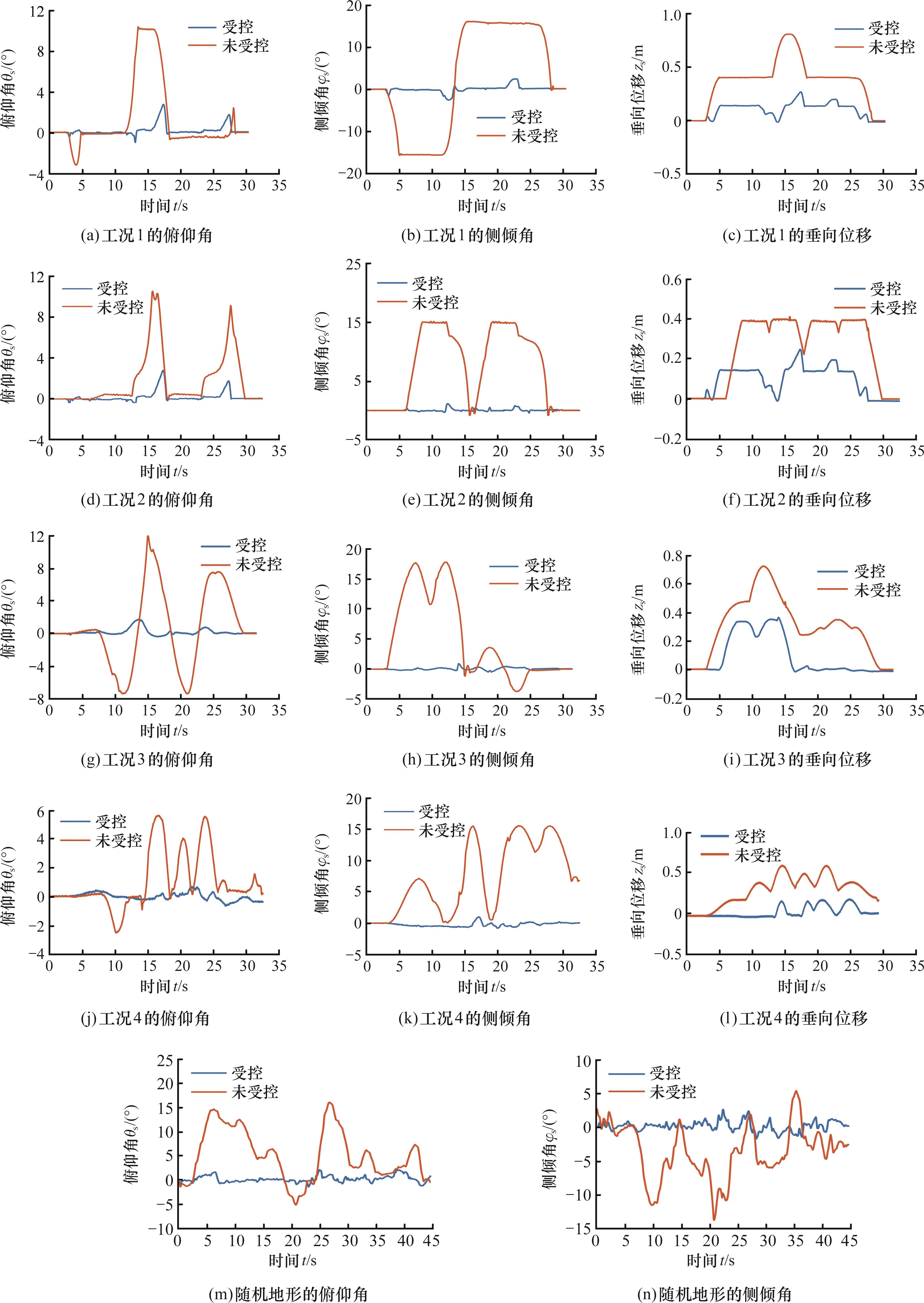
图7 不同场景下受控和不受控情况下的车身姿态
Fig.7 Controlled and uncontrolled vehicle body attitudes under different scenarios
| 工况 | 姿态 | 均值减小率 | 峰值减小率 |
|---|---|---|---|
| 中心对称单边桥 | θs | 78.87 | 73.18 |
| φs | 88.40 | 84.06 | |
| zs | 68.03 | 66.57 | |
| 连续梯形 | θs | 83.63 | 73.14 |
| φs | 89.20 | 92.30 | |
| zs | 61.42 | 40.01 | |
| 连续波浪 | θs | 80.05 | 85.15 |
| φs | 86.21 | 94.81 | |
| zs | 70.41 | 49.72 | |
| 斜坡波浪 | θs | 74.40 | 87.42 |
| φs | 89.23 | 93.48 | |
| zs | 76.58 | 70.94 | |
| 随机地形 | θs | 84.84 | 86.61 |
| φs | 80.96 | 80.80 |
表3 五种工况下的优化结果 (%)
Tab.3 Optimized results of 5 scenarios
| 工况 | 姿态 | 均值减小率 | 峰值减小率 |
|---|---|---|---|
| 中心对称单边桥 | θs | 78.87 | 73.18 |
| φs | 88.40 | 84.06 | |
| zs | 68.03 | 66.57 | |
| 连续梯形 | θs | 83.63 | 73.14 |
| φs | 89.20 | 92.30 | |
| zs | 61.42 | 40.01 | |
| 连续波浪 | θs | 80.05 | 85.15 |
| φs | 86.21 | 94.81 | |
| zs | 70.41 | 49.72 | |
| 斜坡波浪 | θs | 74.40 | 87.42 |
| φs | 89.23 | 93.48 | |
| zs | 76.58 | 70.94 | |
| 随机地形 | θs | 84.84 | 86.61 |
| φs | 80.96 | 80.80 |
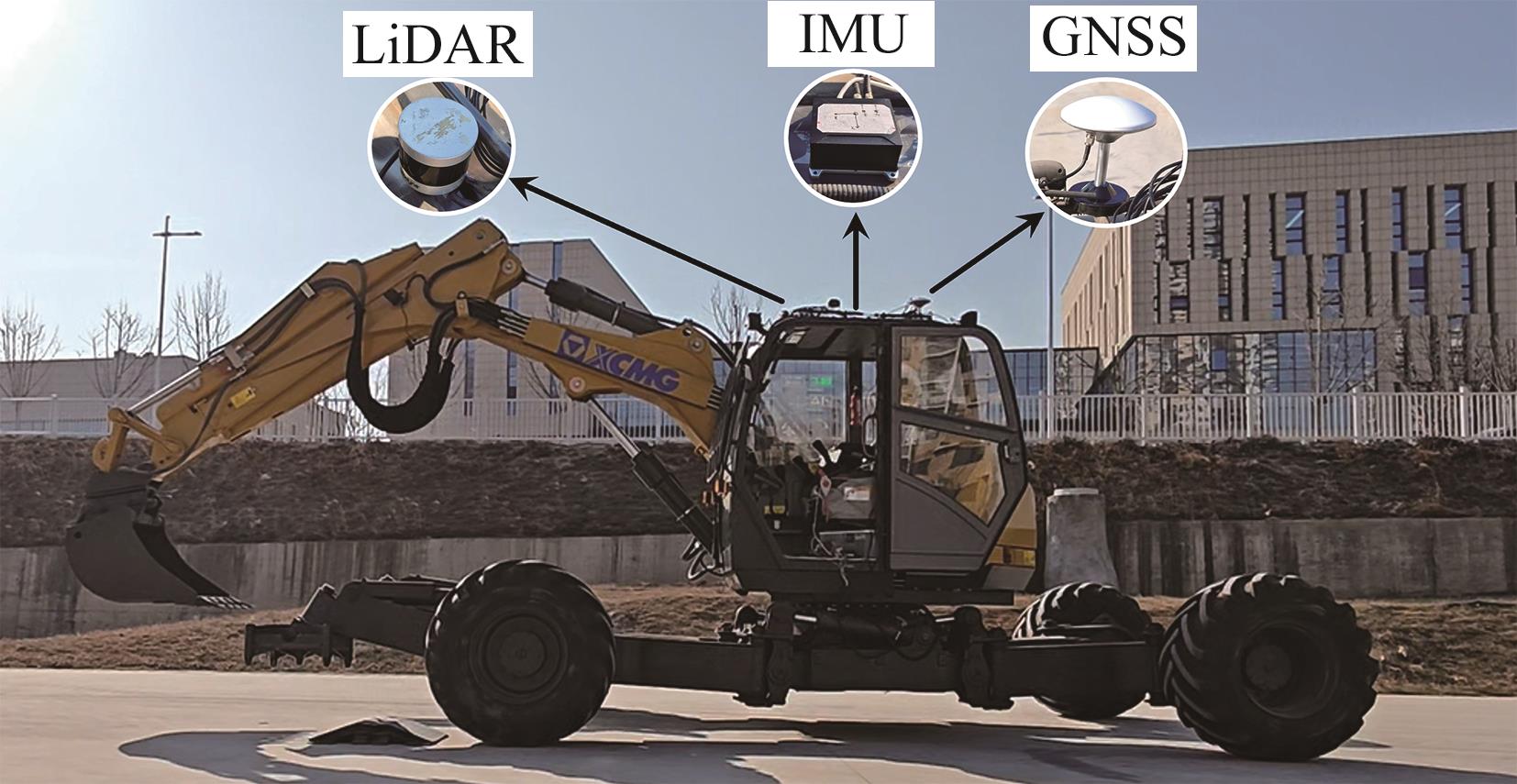
图8 UWE上装备的传感器
Fig.8 The sensors equipped on the UWE

图9 UWE在两种模式下越障的对比
Fig.9 Comparison of the UWE overcoming obstacles in two mode
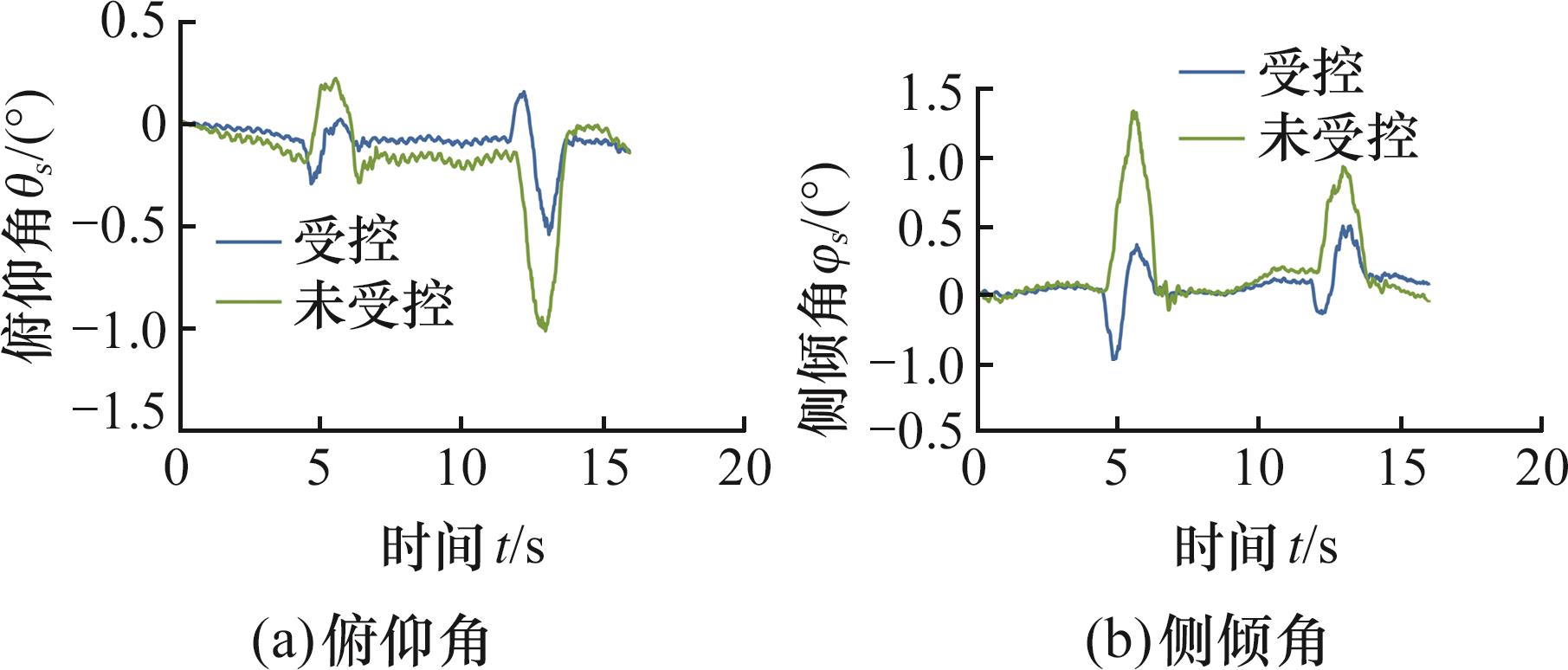
图10 真实环境下的实车车体姿态
Fig.10 Vehicle body attitude in real-world operation
| [1] | 张云, 张杰, 魏宇明. 国内外步履式挖掘机的发展及现状[J]. 建设机械技术与管理, 2020, 33(3): 67-70. |
| ZHANG Yun, ZHANG Jie, WEI Yuming. Development and Present Situation of Walking Excavators at Home and Abroad[J]. Construction Machinery Technology & Management, 2020, 33(3): 67-70. | |
| [2] | 张云. 一种步履式挖掘机的设计与研制[D]. 西安: 长安大学, 2016. |
| ZHANG Yun. Design and development of a walking excavator[D]. Xi'an: Changan University, 2016. | |
| [3] | BABU A, KIRCHNER F. Terrain Adaption Controller for a Walking Excavator Robot Using Deep Reinforcement Learning[C]∥2021 20th International Conference on Advanced Robotics (ICAR). Ljubljana, 2021: 64-70. |
| [4] | 张鑫. 智能型步履式挖掘机动态稳定性分析[D]. 大庆: 东北石油大学, 2014. |
| ZHANG Xin. Dynamic stability analysis of intelligent walking excavator[D]. Daqing: Northeast Petroleum University, 2014. | |
| [5] | BABU A, DANTER L C, WILLENBROCK P, et al. ARTER: a Walking Excavator Robot for Autonomous and Remote Operations[J]. At - Automatisierungstechnik, 2022, 70(10): 876-887. |
| [6] | DONOSO F A, AUSTIN K J, McAREE P R. How Do ICP Variants Perform when Used for Scan Matching Terrain Point Clouds?[J]. Robotics and Autonomous Systems, 2017, 87: 147-161. |
| [7] | SOROKIN A. Post-repair Testing of the Walking Excavators' Electrical Machines[J]. Earth Sciences and Subsoil Use, 2020, 43(1): 103-110. |
| [8] | PIZETTA I H B, SANTOS BRANDÃO A, SARCINELLI-FILHO M. Control and Obstacle Avoidance for an UAV Carrying a Load in Forestal Environments[C]∥2018 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2018: 62-67. |
| [9] | PEVZNER L D, KISELEV N A. Automatic Control System for Walking Dragline Excavator Digging[J]. Mining Science and Technology (Russia), 2022, 7(1): 57-65. |
| [10] | GOLBASI O, SAHINER S F. Simulation-based Optimization of Workforce Configuration for Multi-division Maintenance Departments[J]. Computers & Industrial Engineering, 2024, 188: 109880. |
| [11] | 陈晋市, 张淼淼, 毕秋实, 等. 面向自主作业的挖掘机多目标最优挖掘运动规划[J]. 机械工程学报, 2022, 58(7): 237-245. |
| CHEN Jinshi, ZHANG Miaomiao, BI Qiushi, et al. Multi-objective Optimal Excavator Movement Planning for Autonomous Operation[J]. Journal of Mechanical Engineering, 2022, 58(7): 237-245. | |
| [12] | DONOSO F A, AUSTIN K J, McAREE P R. Three New Iterative Closest Point Variant-methods that Improve Scan Matching for Surface Mining Terrain[J]. Robotics and Autonomous Systems, 2017, 95: 117-128. |
| [13] | PALMER A W, HILL A J, SCHEDING S J. Methods for Stochastic Collection and Replenishment (SCAR) Optimisation for Persistent Autonomy[J]. Robotics and Autonomous Systems, 2017, 87: 51-65. |
| [14] | 王福德, 寇智慧, 张云. 基于ADAMS的灾害救援机器人姿态规划与越障分析[J]. 建筑机械, 2014(11): 71-74. |
| WANG Fude, KOU Zhihui, ZHANG Yun. Attitude Planning and Obstacle Crossing Analysis of Disaster Rescue Robot Based on ADAMS[J]. Construction Machinery,2014(11): 71-74. | |
| [15] | GEHRING C, COROS S, HUTTER M, et al. Practice Makes Perfect: an Optimization-based Approach to Controlling Agile Motions for a Quadruped Robot[J]. IEEE Robotics & Automation Magazine, 2016, 23(1): 34-43.[LinkOut] |
| [16] | 王福德.一种新型六轮全地形移动步履式挖掘机的设计与研究[D].沈阳:沈阳理工大学,2012. |
| WANG Fude. Design and Research of a New Six-wheel All-terrain Mobile Walking Excavator[D]. Shenyang: Shenyang University of Technology, 2012. | |
| [17] | 刘鹏虎, 张勇, 张强. 液压挖掘机工作装置的动力学分析及控制[J]. 中国工程机械学报, 2007, 5(1): 72-74. |
| LIU Penghu, ZHANG Yong, ZHANG Qiang. Dynamical Analysis and Control for Manipulator of Hydraulic Excavator[J]. Chinese Journal of Construction Machinery, 2007, 5(1): 72-74. | |
| [18] | RAIBERT M, BLANKESPOOR K, NELSON G, et al. BigDog, the Rough-terrain Quadruped Robot[J]. IFAC Proceedings Volumes, 2008, 41(2): 10822-10825. |
| [19] | HUTTER M, GEHRING C, HÖPFLINGER M A, et al. Toward Combining Speed, Efficiency, Versatility, and Robustness in an Autonomous Quadruped[J]. IEEE Transactions on Robotics, 2014, 30(6): 1427-1440. |
| [20] | HUTTER M, LEEMANN P, STEVSIC S, et al. Towards Optimal Force Distribution for Walking Excavators[C]∥2015 International Conference on Advanced Robotics (ICAR). Istanbul, 2015: 295-301. |
| [21] | HUTTER M, LEEMANN P, HOTTIGER G, et al. Force Control for Active Chassis Balancing[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 613-622. |
| [22] | ZHANG Tianci, FU Tao, SONG Xueguan, et al. Multi-objective Excavation Trajectory Optimization for Unmanned Electric Shovels Based on Pseudospectral Method[J]. Automation in Construction, 2022, 136: 104176. |
| [23] | FU Tao, ZHANG Tianci, Yilin LYU, et al. Digital Twin-based Excavation Trajectory Generation of Uncrewed Excavators for Autonomous Mining[J]. Automation in Construction, 2023, 151: 104855. |
| [24] | ZHANG Tianci, FU Tao, NI Tao, et al. Data-driven Excavation Trajectory Planning for Unmanned Mining Excavator[J]. Automation in Construction, 2024, 162: 105395. |
| [25] | BJELONIC M, SANKAR P K, BELLICOSO C D, et al. Rolling in the Deep – Hybrid Locomotion for Wheeled-legged Robots Using Online Trajectory Optimization[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3626-3633. |
| [26] | SUN Jingyuan, YOU Yangwei, ZHAO Xuran, et al. Towards More Possibilities: Motion Planning and Control for Hybrid Locomotion of Wheeled-legged Robots[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3723-3730. |
| [27] | JELAVIC E, HUTTER M. Whole-body Motion Planning for Walking Excavators[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau, 2019: 2292-2299. |
| [28] | JELAVIC E, BERDOU Y, JUD D, et al. Terrain-adaptive Planning and Control of Complex Motions for Walking Excavators[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, 2020: 2684-2691. |
| [29] | JELAVIC E, FARSHIDIAN F, HUTTER M. Combined Sampling and Optimization Based Planning for Legged-wheeled Robots[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, 2021: 8366-8372.[LinkOut] |
| [30] | ASPRAGATHOS N A, DIMITROS J K. A Comparative Study of Three Methods for Robot Kinematics[J]. IEEE Transactions on Systems, Man, and Cybernetics Part B, Cybernetics, 1998, 28(2): 135-145.[PubMed] |
| [1] | 李明磊, 贾育秦, 张学良, 刘丽琴, 杜娟, 温淑花, 兰国生. 基于多目标差异演化算法的并联机构结构优化 [J]. J4, 201016, 21(16): 1915-1920. |
| [2] | 耿宇航, 何雪明, 高宗. 基于NURBS啮合线的高效双螺杆转子自适应设计方法[J]. 中国机械工程, 2025, 36(12): 2837-2845. |
| [3] | 党旭, 刘涛, 闫敏, 徐智为. 变截面涡旋盘精密铣削参数多目标优化[J]. 中国机械工程, 2025, 36(12): 2854-2861. |
| [4] | 封雨鑫, 刘坚, 邓宏贵, 余强, 王战, 叶浩泉. 激光高速高精加工非均匀有理B样条曲线插补方法[J]. 中国机械工程, 2025, 36(12): 3002-3009. |
| [5] | 刘建林, 黄海松, 范青松, 马驰, 张浪浪. 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究[J]. 中国机械工程, 2025, 36(09): 2047-2056. |
| [6] | 林述温, 陆哲, 危世佳, 陈剑雄, 顾天奇, 谢钰. 挖掘机工作过程动力特性仿真及主构件参数多目标优化设计方法[J]. 中国机械工程, 2025, 36(06): 1371-1379. |
| [7] | 饶远1, 孙见君1, 闻兰2. 扩压式自泵送机械密封端面的液膜汽化及其结构优化研究[J]. 中国机械工程, 2025, 36(05): 933-941,953. |
| [8] | 张道德, 卢子健, 赵坤, 杨智勇. 非平坦环境下履带机器人多目标路径规划方法研究[J]. 中国机械工程, 2025, 36(02): 305-314. |
| [9] | 刘桂源1, 王曾2, 杨子艺2, 胡明珠1, 刘怀举1. 航空发动机附件机匣齿轮传动设计分析软件开发与应用[J]. 中国机械工程, 2024, 35(11): 1938-1947. |
| [10] | 胡福清, 孙江宏, 孙英杰, 孙雨彤, 马超, 周福强, . 基于新型旋转直线往复机构的切片机设计分析及参数优化[J]. 中国机械工程, 2024, 35(04): 614-623,635. |
| [11] | 魏书鹏, 唐红涛, 李西兴, 杨冠宇, 张健. 考虑双资源约束的柔性机械加工车间逆调度问题研究[J]. 中国机械工程, 2024, 35(03): 457-471. |
| [12] | 荣誉, 陈刚, 豆天赐, . 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(02): 305-316. |
| [13] | 刘毅, 易旺民, 姚建涛, 王兴达, 余鹏, 赵永生. 狭长空间内重载调姿装配机器人的设计与研究[J]. 中国机械工程, 2024, 35(02): 324-336. |
| [14] | 屈力刚, 苏岩, 邢宇飞. 基于SHO-NSGA混合算法的飞机油舱管路自动布局方法[J]. 中国机械工程, 2023, 34(15): 1864-1872. |
| [15] | 彭翔, 江浩浩, 郭玉良, 李吉泉, 易兵, 姜少飞, . 机翼蒙皮铺层顺序和材料布局协同优化[J]. 中国机械工程, 2023, 34(12): 1415-1424,1435. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||