


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (9): 2047-2056.DOI: 10.3969/j.issn.1004-132X.2025.09.017
• 智能制造 • 上一篇
刘建林1( ), 黄海松1,2(), 范青松1,3, 马驰1, 张浪浪1
), 黄海松1,2(), 范青松1,3, 马驰1, 张浪浪1
收稿日期:2024-07-25
出版日期:2025-09-25
发布日期:2025-10-15
通讯作者:
黄海松
作者简介:刘建林,男,1999年生,硕士研究生。研究方向为机械臂控制。E-mail:ljl2685177925@163.com基金资助:
Jianlin LIU1(), Haisong HUANG1,2(), Qingsong FAN1,3, Chi MA1, Langlang ZHANG1
Received:2024-07-25
Online:2025-09-25
Published:2025-10-15
Contact:
Haisong HUANG
摘要:
提出了一种基于改进樽海鞘群算法(SSA)的机械臂多目标轨迹规划模型,以同时优化效率、能耗和冲击三个目标。利用人工势场法(APF)进行路径规划,得到机械臂抓取物料的最短、无碰撞路径,并提取关键运动序列,建立多目标函数。针对多目标樽海鞘群算法(MSSA)的初始种群多样性差、容易陷入局部最优以及在解集空间中收敛缓慢等问题,提出了一种改进的多目标樽海鞘群算法(LMSSA)。该算法结合logistic-sine混沌映射、小孔成像学习策略和黄金正弦开发策略来优化七阶B样条曲线的控制节点从而完成机械臂的多目标运动轨迹规划。搭建MATLAB-CoppeliaSim-UR16e实验平台,将轨迹规划模型应用于机械臂UR16e的实际抓取任务。实验结果表明,基于LMSSA算法的机械臂运动规划方法实现了机械臂准确、高效且节能的运动轨迹规划,并成功应用于实际操作场景中。
中图分类号:
刘建林, 黄海松, 范青松, 马驰, 张浪浪. 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究[J]. 中国机械工程, 2025, 36(9): 2047-2056.
Jianlin LIU, Haisong HUANG, Qingsong FAN, Chi MA, Langlang ZHANG. Multi-objective Trajectory Planning of Manipulators Based on Improved SSA[J]. China Mechanical Engineering, 2025, 36(9): 2047-2056.
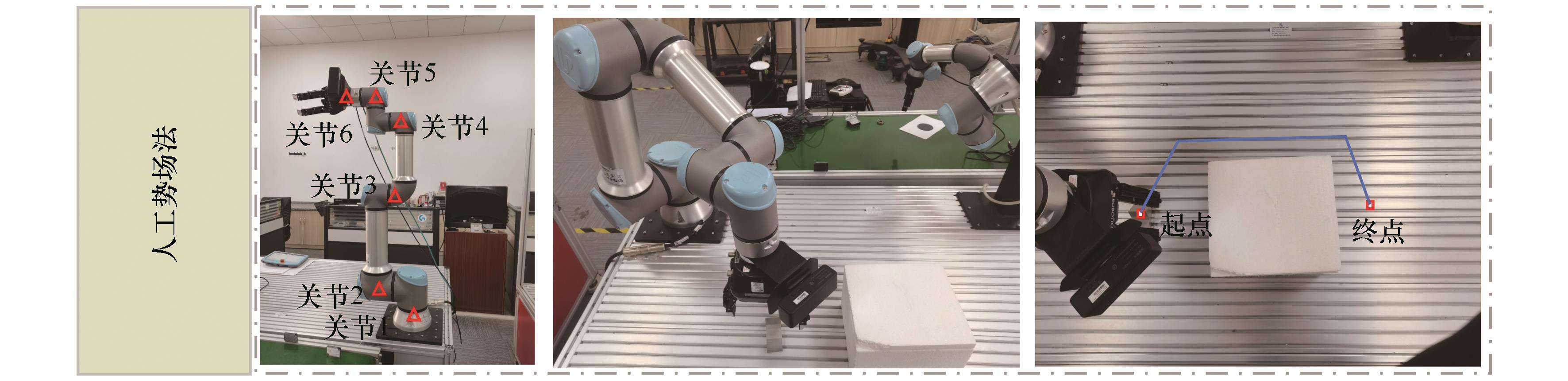
图1 六自由度机械臂路径规划
Fig.1 Path planning of 6-DOF robotic arm
| 关节 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 位置0 | 89.70 | 8.39 | ||||
| 位置1 | 104.30 | |||||
| 位置2 | 0.75 | 100.92 | ||||
| 位置3 | 8.65 | 97.50 | ||||
| 位置4 | 8.06 | 97.15 | ||||
| 位置5 | 13.02 | 89.92 | ||||
| 位置6 | 14.49 | 81.42 | 3.33 | |||
| 位置7 | 5.76 | 77.03 | 7.26 | 19.51 |
表1 六自由度机械臂关节位置序列
Tab.1 Joint position sequence of 6-DOF robotic arm (°)
| 关节 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 位置0 | 89.70 | 8.39 | ||||
| 位置1 | 104.30 | |||||
| 位置2 | 0.75 | 100.92 | ||||
| 位置3 | 8.65 | 97.50 | ||||
| 位置4 | 8.06 | 97.15 | ||||
| 位置5 | 13.02 | 89.92 | ||||
| 位置6 | 14.49 | 81.42 | 3.33 | |||
| 位置7 | 5.76 | 77.03 | 7.26 | 19.51 |
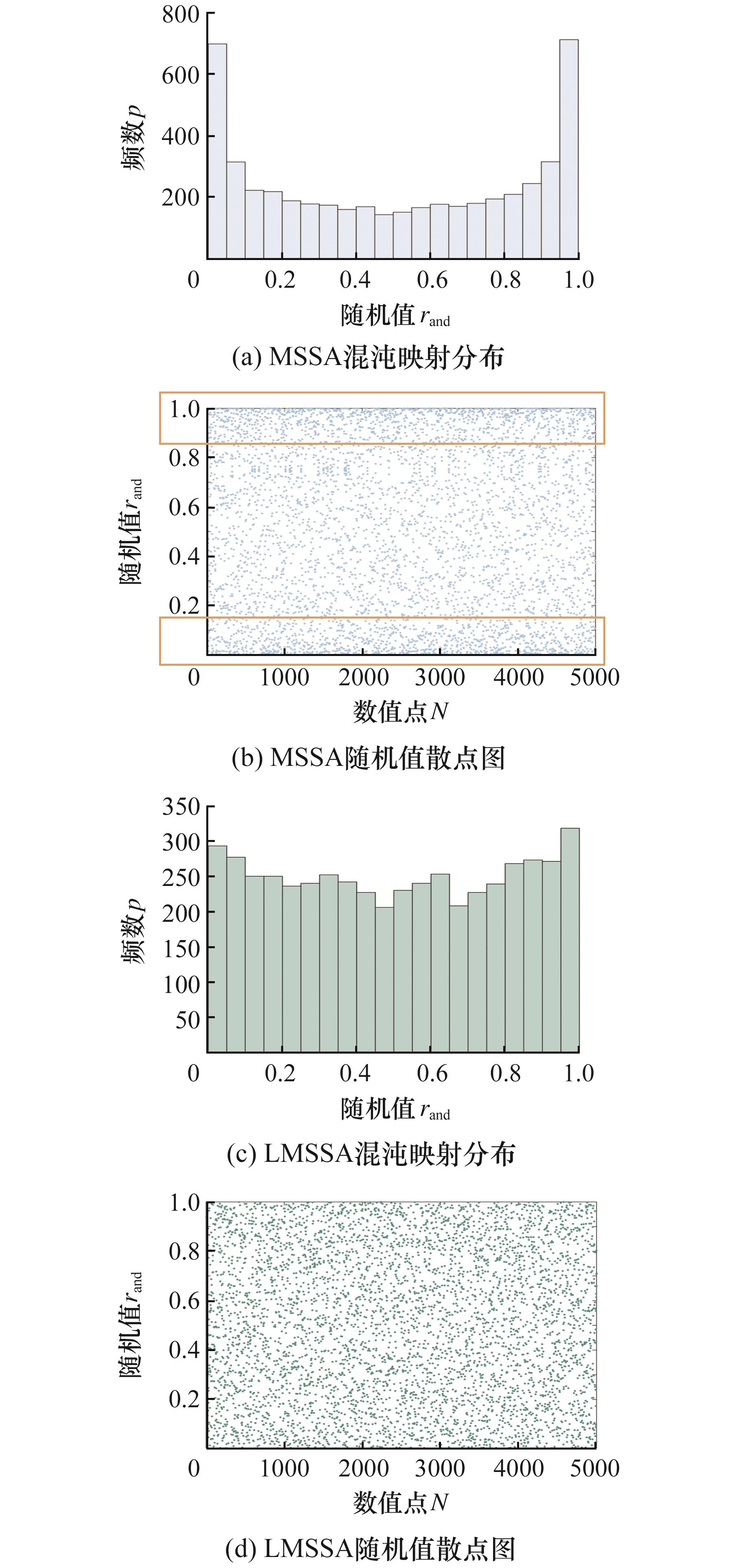
图2 混沌映射分布
Fig.2 Distribution of chaotic mapping
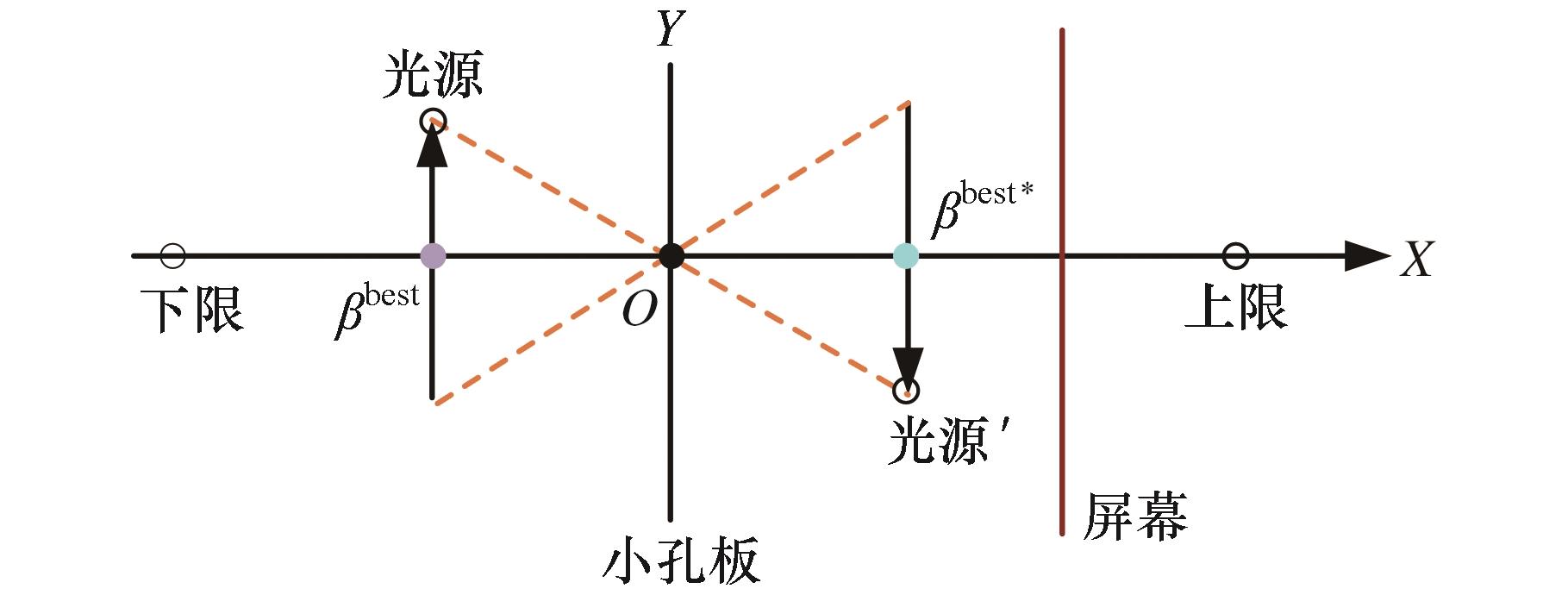
图3 小孔成像学习策略
Fig.3 PIL strategy
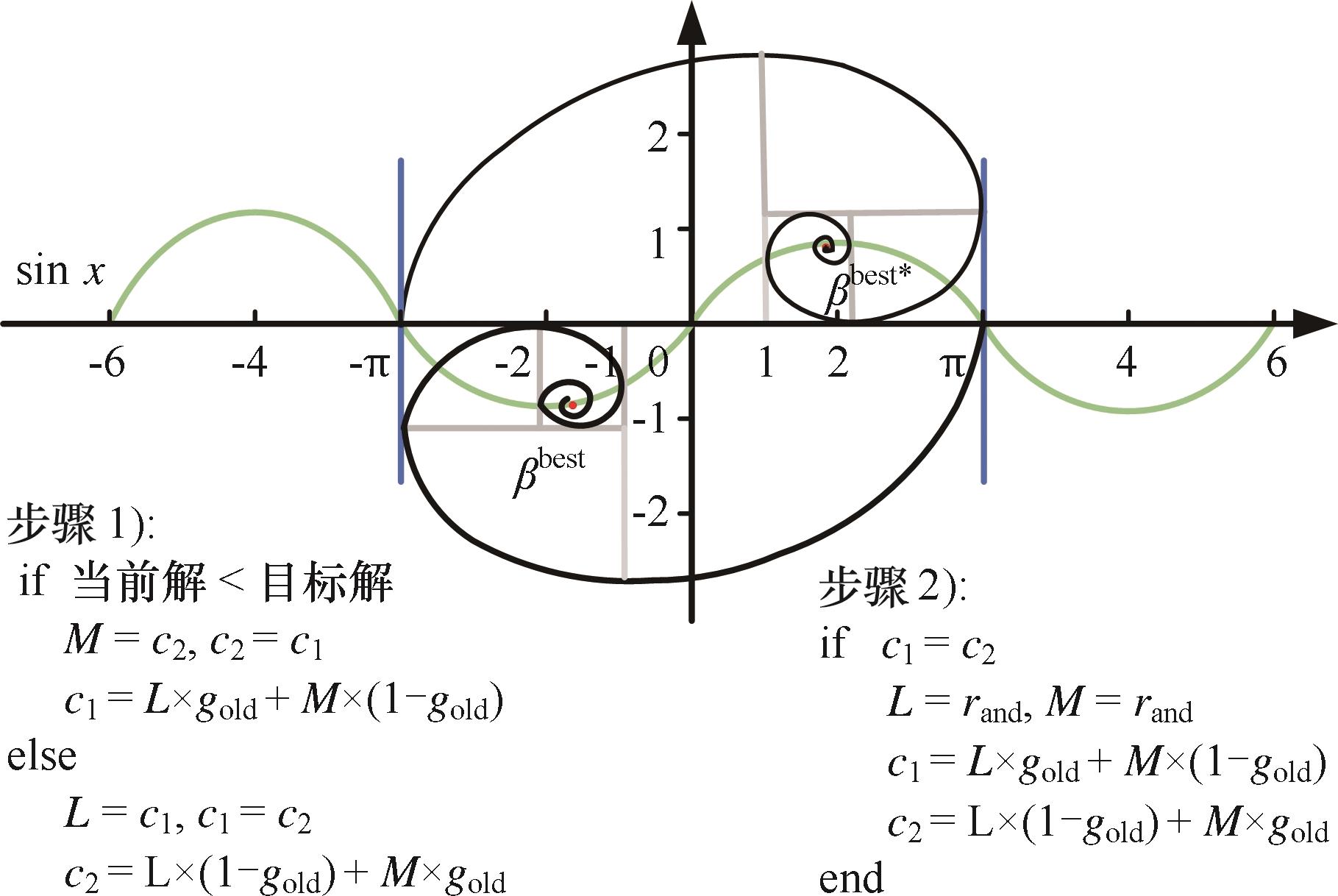
图4 黄金正弦开发策略
Fig.4 Golden sine development strategy
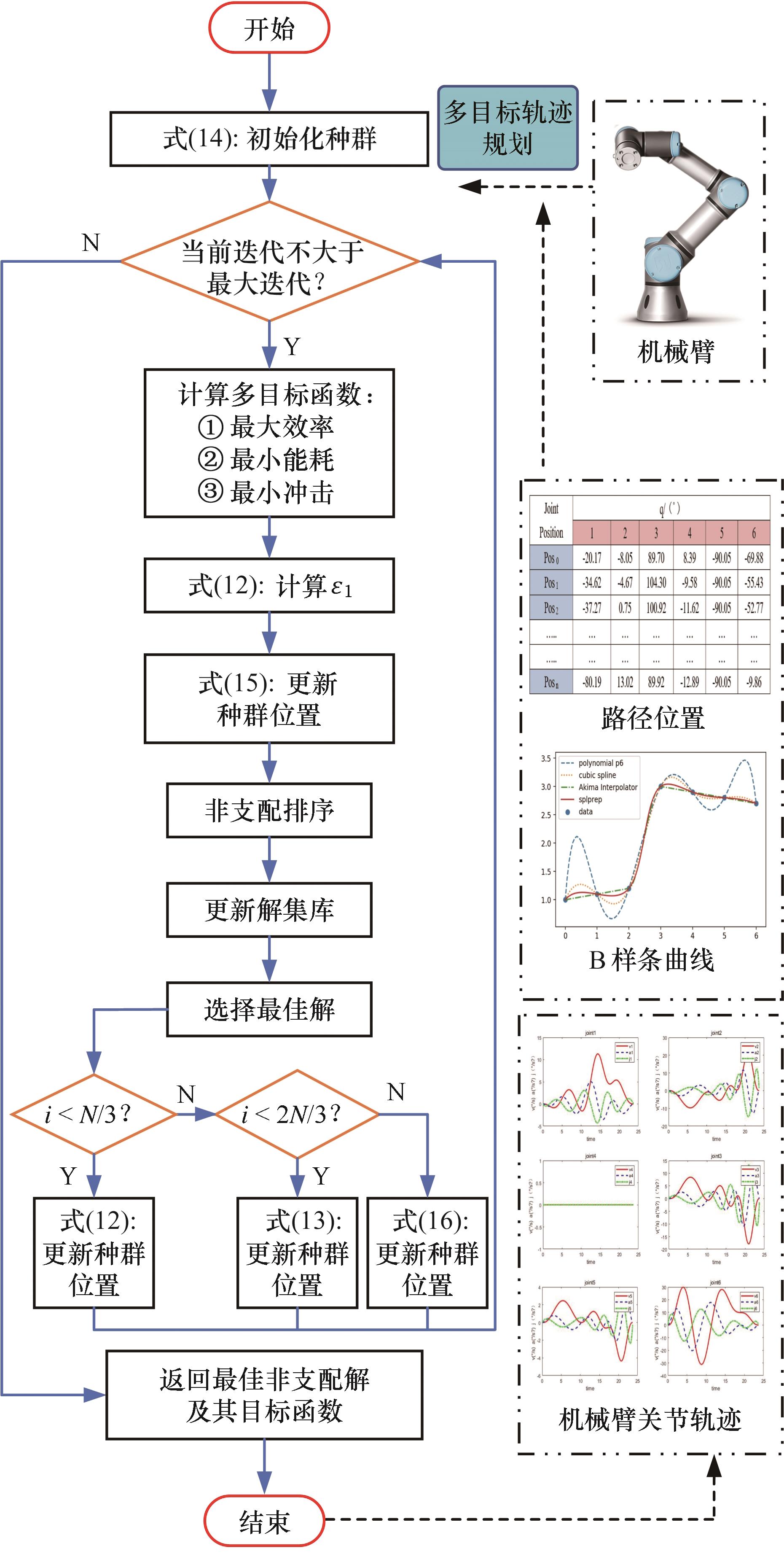
图5 轨迹规划模型
Fig.5 Trajectory planning model
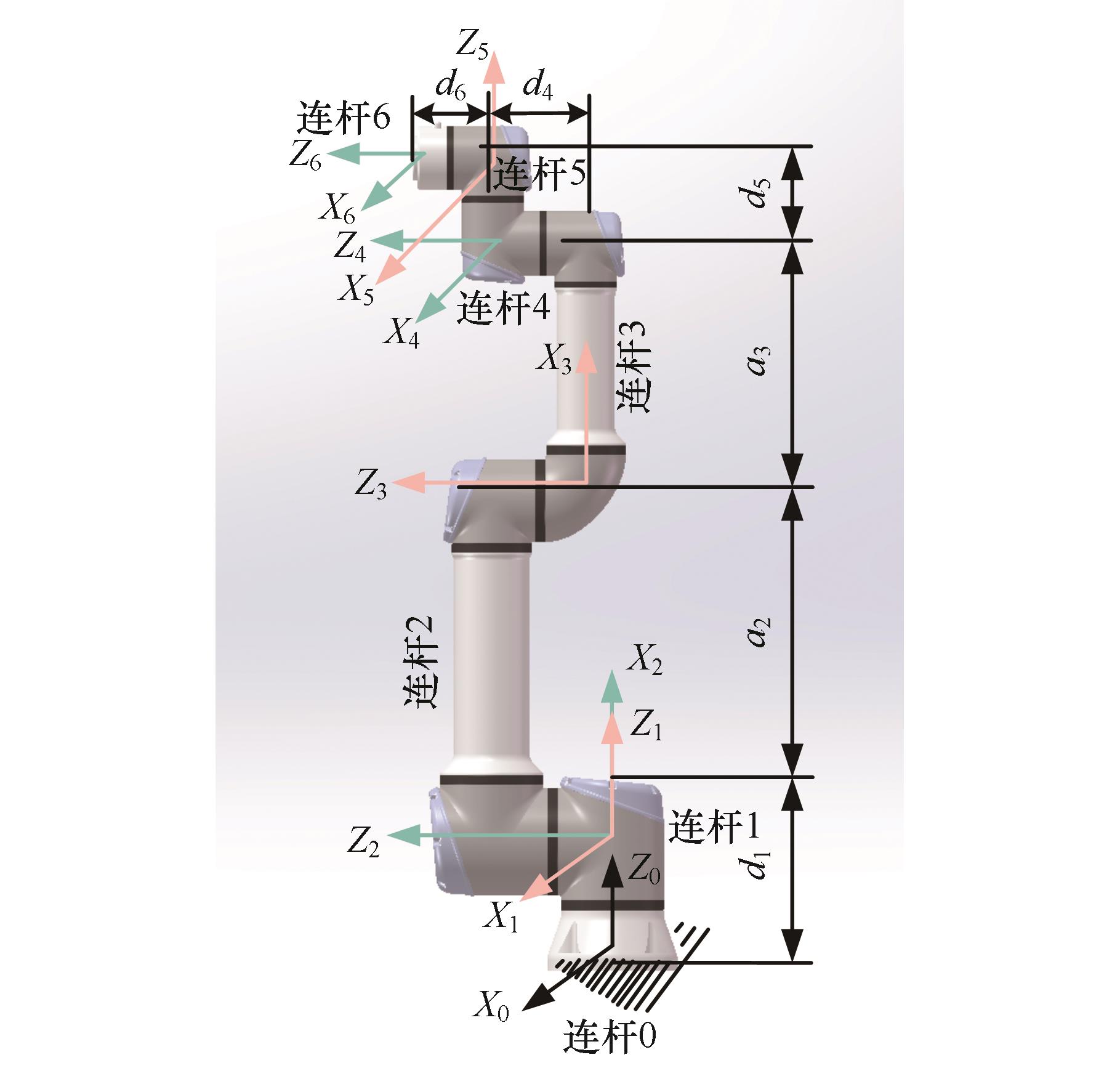
图6 六自由度机械臂模型
Fig.6 Model of 6-DOF robotic arm
关 节 | a/ (m·s-2) | d/m | α/ rad | θ/ rad | 最大 速度/ ((°)·s-1) | 最大 加速 度/ ((°)·s-2) | 最大关节 急动度/((°)·s-3) | 最大 扭矩/(N∙m) |
|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0.1807 | π/2 | 0 | 120 | 45 | 90 | 327 |
| 2 | 0 | 0 | 0 | 120 | 40 | 80 | 167 | |
| 3 | 0 | 0 | 0 | 180 | 75 | 70 | 167 | |
| 4 | 0 | 0.174 15 | π/2 | 0 | 180 | 70 | 55 | 20 |
| 5 | 0 | 0.119 85 | 0 | 180 | 90 | 60 | 10 | |
| 6 | 0 | 0.11655 | 0 | 0 | 180 | 80 | 60 | 10 |
表2 六自由度机械臂关节约束
Tab.2 Joint constraints of 6-DOF robotic arm
关 节 | a/ (m·s-2) | d/m | α/ rad | θ/ rad | 最大 速度/ ((°)·s-1) | 最大 加速 度/ ((°)·s-2) | 最大关节 急动度/((°)·s-3) | 最大 扭矩/(N∙m) |
|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0.1807 | π/2 | 0 | 120 | 45 | 90 | 327 |
| 2 | 0 | 0 | 0 | 120 | 40 | 80 | 167 | |
| 3 | 0 | 0 | 0 | 180 | 75 | 70 | 167 | |
| 4 | 0 | 0.174 15 | π/2 | 0 | 180 | 70 | 55 | 20 |
| 5 | 0 | 0.119 85 | 0 | 180 | 90 | 60 | 10 | |
| 6 | 0 | 0.11655 | 0 | 0 | 180 | 80 | 60 | 10 |
| 对比算法 | 参数设置 |
|---|---|
| MSSA | 无 |
| MODA | 无 |
| MOGOA | cmax=1,cmin=0.000 04 |
| MOMVO | WEPmax=1,WEPmin=0.2 |
| LMSSA | 无 |
表3 对比实验参数设置
Tab.3 Comparison experiment parameter settings
| 对比算法 | 参数设置 |
|---|---|
| MSSA | 无 |
| MODA | 无 |
| MOGOA | cmax=1,cmin=0.000 04 |
| MOMVO | WEPmax=1,WEPmin=0.2 |
| LMSSA | 无 |

图7 机械臂运动路径
Fig.7 Motion path of the robot arm
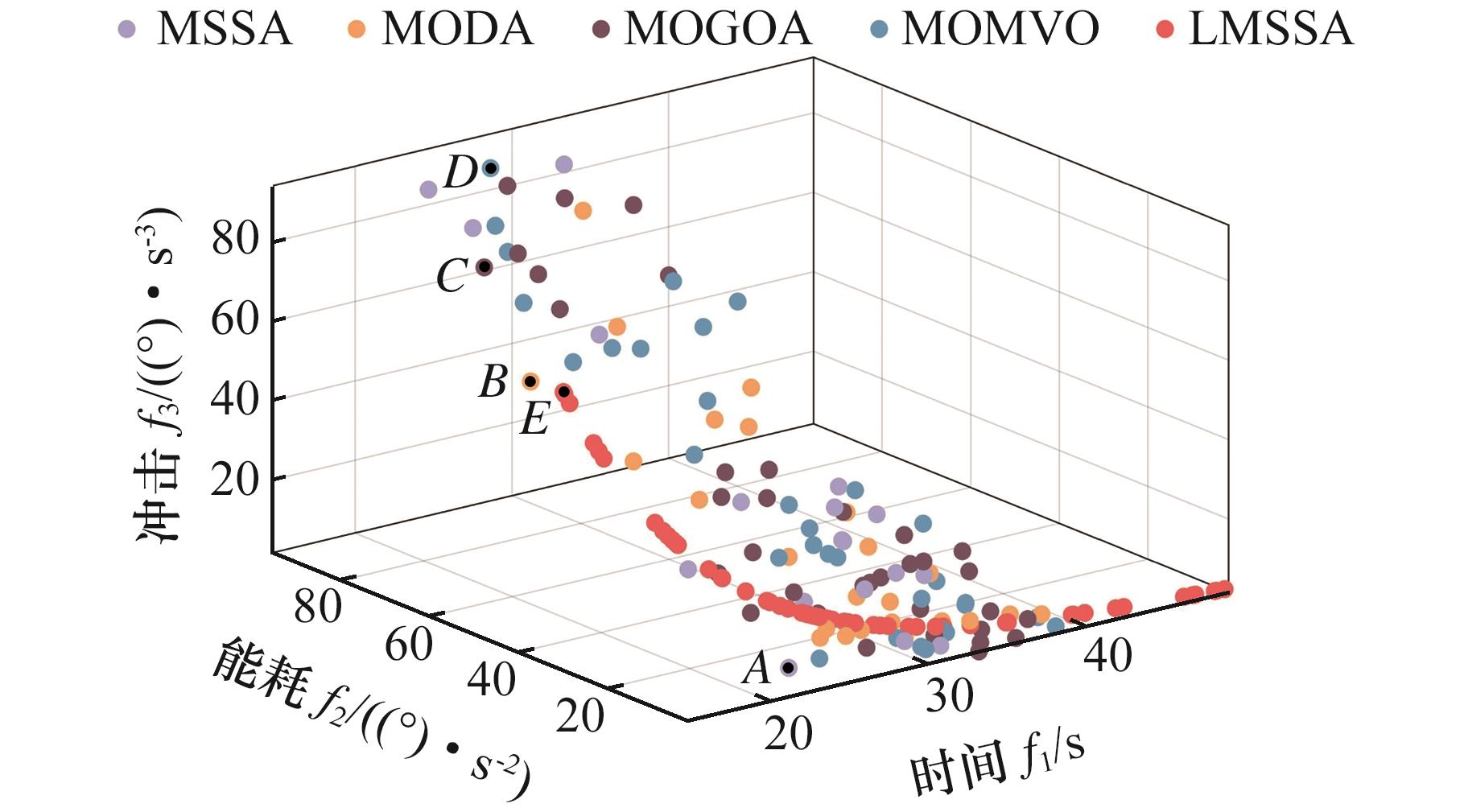
图8 多目标轨迹规划的Pareto解集
Fig.8 Pareto solution set for multi-objective trajectory planning
| 多目标算法 | 前沿点 | f1/s | f2/((°)·s-2) | f3/((°)·s-3) |
|---|---|---|---|---|
| MSSA | A | 22.1084 | 5.0871 | 6.5298 |
| MODA | B | 17.3987 | 46.6482 | 64.3333 |
| MOGOA | C | 19.3285 | 63.9597 | 83.4501 |
| MOMVO | D | 25.5248 | 84.4578 | 93.3547 |
| LMSSA | E | 14.7123 | 29.7611 | 71.8474 |
表4 Pareto前沿点优化结果
Tab.4 Optimization results of Pareto frontier points
| 多目标算法 | 前沿点 | f1/s | f2/((°)·s-2) | f3/((°)·s-3) |
|---|---|---|---|---|
| MSSA | A | 22.1084 | 5.0871 | 6.5298 |
| MODA | B | 17.3987 | 46.6482 | 64.3333 |
| MOGOA | C | 19.3285 | 63.9597 | 83.4501 |
| MOMVO | D | 25.5248 | 84.4578 | 93.3547 |
| LMSSA | E | 14.7123 | 29.7611 | 71.8474 |
| MSSA | MODA | MOGOA | MOMVO | LMSSA | ||
|---|---|---|---|---|---|---|
| Pareto解集个数 | 21 | 26 | 40 | 36 | 62 | |
| 时间/s | 最小值 | 20.5116 | 17.3987 | 19.3285 | 17.3014 | 14.7123 |
| 最大值 | 34.0801 | 38.1684 | 37.2126 | 38.5459 | 49.2208 | |
能耗/ ((°)·s-2) | 最小值 | 4.0654 | 4.8909 | 1.7769 | 3.0430 | 2.6992 |
| 最大值 | 95.4776 | 75.2556 | 87.0272 | 85.5218 | 29.7611 | |
冲击/ ((°)·s-3) | 最小值 | 3.7635 | 5.0333 | 1.6662 | 2.4648 | 1.9407 |
| 最大值 | 89.2185 | 83.6998 | 94.0682 | 93.354 69 | 71.8474 | |
| 间距(SP) | 9.9845 | 10.2340 | 5.2948 | 5.8237 | 1.0383 | |
| 运行时间(s) | 3421 | 3786 | 4082 | 3562 | 3289 | |
表5 Pareto解集结果对比
Tab.5 Comparison of Pareto solution set results
| MSSA | MODA | MOGOA | MOMVO | LMSSA | ||
|---|---|---|---|---|---|---|
| Pareto解集个数 | 21 | 26 | 40 | 36 | 62 | |
| 时间/s | 最小值 | 20.5116 | 17.3987 | 19.3285 | 17.3014 | 14.7123 |
| 最大值 | 34.0801 | 38.1684 | 37.2126 | 38.5459 | 49.2208 | |
能耗/ ((°)·s-2) | 最小值 | 4.0654 | 4.8909 | 1.7769 | 3.0430 | 2.6992 |
| 最大值 | 95.4776 | 75.2556 | 87.0272 | 85.5218 | 29.7611 | |
冲击/ ((°)·s-3) | 最小值 | 3.7635 | 5.0333 | 1.6662 | 2.4648 | 1.9407 |
| 最大值 | 89.2185 | 83.6998 | 94.0682 | 93.354 69 | 71.8474 | |
| 间距(SP) | 9.9845 | 10.2340 | 5.2948 | 5.8237 | 1.0383 | |
| 运行时间(s) | 3421 | 3786 | 4082 | 3562 | 3289 | |
| 关节轨迹时间节点 | B样条曲线控制节点向量 | |
|---|---|---|
| MSSA | (1.12,1.20,1.00,0.66,1.20,1.36,0.54) | (0,0,0,0,0,0,0,0,0.16,0.33,0.47,0.56,0.73,0.92,1,1,1,1,1,1,1,1) |
| MODA | (0.30,6.91,5.01,4.66,4.66,2.35,0.84) | (0,0,0,0,0,0,0,0,0.01,0.29,0.49,0.68,0.87,0.97,1,1,1,1,1,1,1,1) |
| MOGOA | (6.91,3.17,4.55, 1.16,2.24,2.33,4.12) | (0,0,0,0,0,0,0,0,0.28,0.41,0.60,0.65,0.74,0.83,1,1,1,1,1,1,1,1) |
| MOMVO | (1.73,1.40,1.41, 0.63,0.57,1.24,0.12) | (0,0,0,0,0,0,0,0,0.24,0.44,0.64,0.73,0.81,0.98,1,1,1,1,1,1,1,1) |
| LMSSA | (4.36,0.91,1.43, 2.53,0.69,1.66,2.13) | (0,0,0,0,0,0,0,0,0.32,0.38,0.49,0.67,0.72,0.84,1,1,1,1,1,1,1,1) |
表6 Pareto前沿点优化后的节点变量
Tab.6 Node variables after Pareto frontier point optimization
| 关节轨迹时间节点 | B样条曲线控制节点向量 | |
|---|---|---|
| MSSA | (1.12,1.20,1.00,0.66,1.20,1.36,0.54) | (0,0,0,0,0,0,0,0,0.16,0.33,0.47,0.56,0.73,0.92,1,1,1,1,1,1,1,1) |
| MODA | (0.30,6.91,5.01,4.66,4.66,2.35,0.84) | (0,0,0,0,0,0,0,0,0.01,0.29,0.49,0.68,0.87,0.97,1,1,1,1,1,1,1,1) |
| MOGOA | (6.91,3.17,4.55, 1.16,2.24,2.33,4.12) | (0,0,0,0,0,0,0,0,0.28,0.41,0.60,0.65,0.74,0.83,1,1,1,1,1,1,1,1) |
| MOMVO | (1.73,1.40,1.41, 0.63,0.57,1.24,0.12) | (0,0,0,0,0,0,0,0,0.24,0.44,0.64,0.73,0.81,0.98,1,1,1,1,1,1,1,1) |
| LMSSA | (4.36,0.91,1.43, 2.53,0.69,1.66,2.13) | (0,0,0,0,0,0,0,0,0.32,0.38,0.49,0.67,0.72,0.84,1,1,1,1,1,1,1,1) |
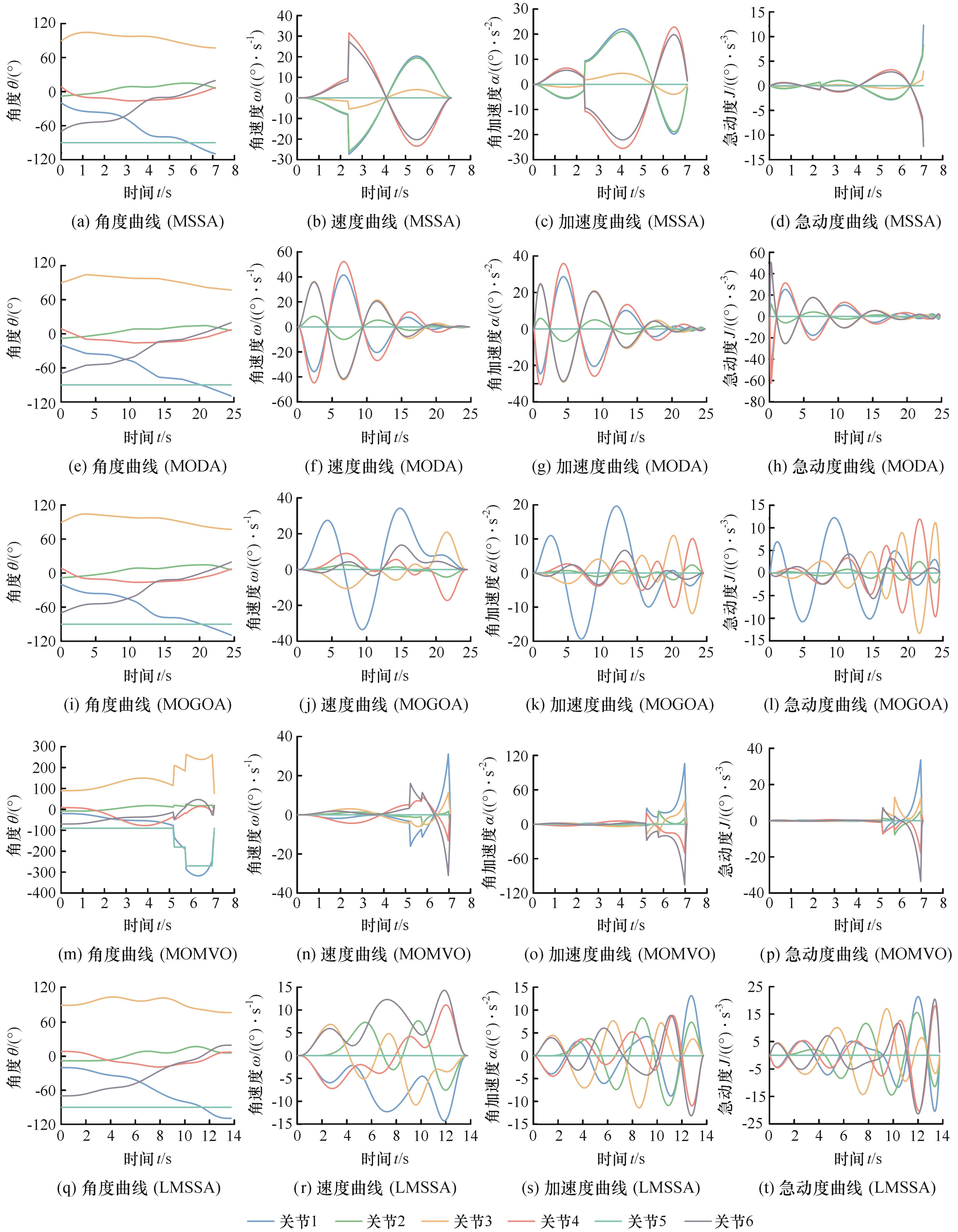
图9 多目标轨迹规划实验结果
Fig.9 Experimental results of multi-object trajectory planning
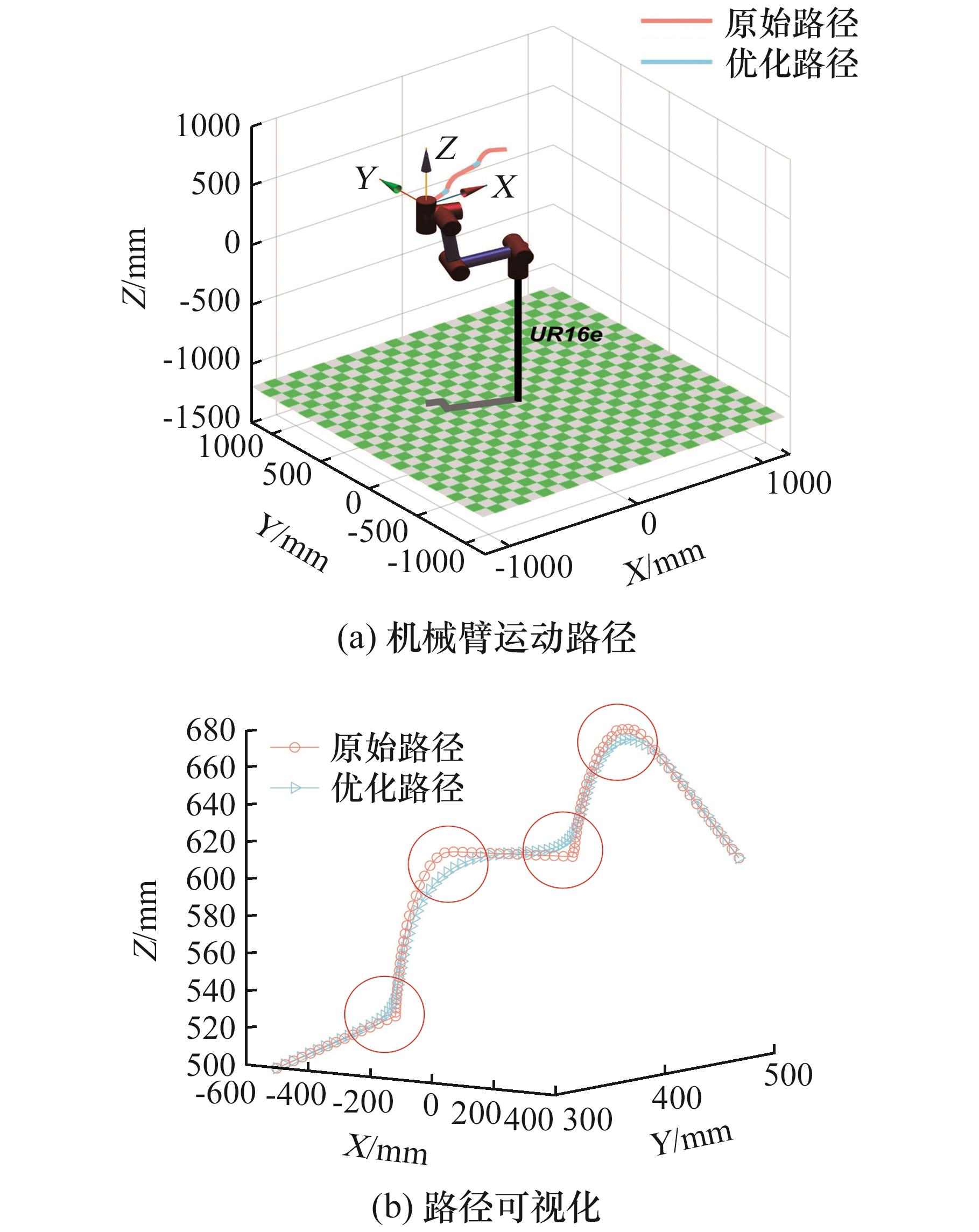
图10 优化路径与原始路径对比
Fig.10 Comparison between the optimized path and the original path

图11 MATLAB-CoppeliaSim-UR16e实验平台
Fig.11 MATLAB-CoppeliaSim-UR16e experimental platform
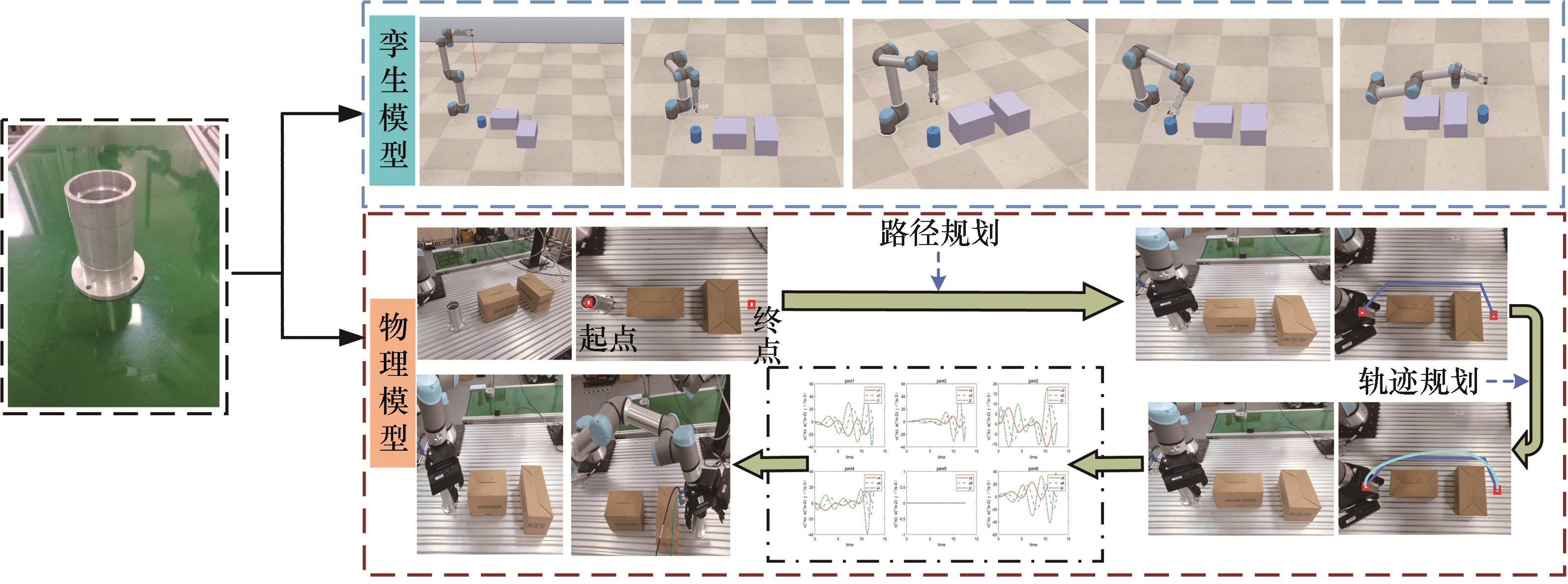
图12 UR16e抓取实验
Fig.12 UR16e grasping experiment
| 时间/s | 能耗/((°)·s-2) | 冲击/((°)·s-3) | |
|---|---|---|---|
| 原始方法 | 3.74 | 243.65 | 342.13 |
| 本文方法 | 2.67 | 191.81 | 278.91 |
| 优化效果 | 28.61% | 21.28% | 18.48% |
表 7 轨迹规划的多目标指标
Tab.7 Multi-objective indicators of trajectory planning
| 时间/s | 能耗/((°)·s-2) | 冲击/((°)·s-3) | |
|---|---|---|---|
| 原始方法 | 3.74 | 243.65 | 342.13 |
| 本文方法 | 2.67 | 191.81 | 278.91 |
| 优化效果 | 28.61% | 21.28% | 18.48% |
| [1] | CONG Yongzheng, JIANG Congrang, LIU Hui, et al. Research on Trajectory Planning Method of Dual-arm Robot Based on ROS[C]∥2020 Chinese Automation Congress (CAC). Shanghai, 2020:2616-2621. |
| [2] | LI Xiangfei, ZHAO Huan, HE Xianming, et al. A Novel Cartesian Trajectory Planning Method by Using Triple NURBS Curves for Industrial Robots[J]. Robotics and Computer-Integrated Manufacturing, 2023, 83:102576. |
| [3] | ROUT A, BBVL D, BISWAL B B. Optimal Trajectory Generation of an Industrial Welding Robot with Kinematic and Dynamic Constraints[J]. Industrial Robot:the International Journal of Robotics Research and Application, 2019, 47(1):68-75. |
| [4] | HUANG Junsen, HU Pengfei, WU Kaiyuan, et al. Optimal Time-jerk Trajectory Planning for Industrial Robots[J]. Mechanism and Machine Theory, 2018, 121:530-544. |
| [5] | 荣誉, 陈刚, 豆天赐. 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(2):305-316. |
| RONG Yu, CHEN Gang, DOU Tianci. A Multi Index Comprehensive Optimal Anti Impact Trajectory Planning Method[J]. China Mechanical Engineering, 2024, 35(2):305-316. | |
| [6] | SHARMA S, KUMAR V. A Comprehensive Review on Multi-objective Optimization Techniques:Past, Present and Future[J]. Archives of Computational Methods in Engineering, 2022, 29(7):5605-5633. |
| [7] | RAHIMI I, GANDOMI A H, CHEN Fang, et al. A Review on Constraint Handling Techniques for Population-based Algorithms:from Single-objective to Multi-objective Optimization[J]. Archives of Computational Methods in Engineering, 2023, 30(3):2181-2209. |
| [8] | MIRJALILI S, GANDOMI A H, MIRJALILI S Z, et al. Salp Swarm Algorithm:a Bio-inspired Optimizer for Engineering Design Problems[J]. Advances in Engineering Software, 2017, 114:163-191. |
| [9] | 脱阳, 张则强, 张裕, 等. 考虑可变时间的双边机器人拆卸线平衡问题建模与优化[J]. 计算机集成制造系统, 2023, 29(12):4073-4088. |
| Yang TUO, ZHANG Zeqiang, ZHANG Yu, et al. Modeling and Optimization for Two-sided Robots Disassembly Line Balancing Problems Considering Variable Time[J]. Computer Integrated Manufacturing Systems, 2023, 29(12):4073-4088. | |
| [10] | De BOOR C. A Practical Guide to Splines[M]. New York:Springer, 1978. |
| [11] | 王婷. 基于改进鲸鱼优化算法的打磨机器人轨迹优化与控制[D]. 太原:中北大学, 2021. |
| WANG Ting. Trajectory Optimization and Control of Grinding Robot Based on Improved Whale Optimization Algorithm[D].Taiyuan:North University of China, 2021. | |
| [12] | 黄安琪儿. 钢筋捆扎机械臂运动规划研究[D].长沙:中南大学, 2023. |
| HUANG Anqier. Research on Motion Planning of Steel Bar Binding Manipulator[D]. Changsha:Central South University, 2023. | |
| [13] | REZAEE JORDEHI A. A Chaotic-based Big Bang-Big Crunch Algorithm for Solving Global Optimisation Problems[J]. Neural Computing and Applications, 2014, 25(6):1329-1335. |
| [14] | HEGAZY A E, MAKHLOUF M A, EL-TAWEL G S. Improved Salp Swarm Algorithm for Feature Selection[J]. Journal of King Saud University - Computer and Information Sciences, 2020, 32(3):335-344. |
| [15] | GARG V, DEEP K, ALNOWIBET K A, et al. Biogeography Based Optimization with Salp Swarm Optimizer Inspired Operator for Solving Non-linear Continuous Optimization Problems[J]. Alexandria Engineering Journal, 2023, 73:321-341. |
| [16] | MIRJALILI S. Dragonfly Algorithm:a New Meta-heuristic Optimization Technique for Solving Single-objective, Discrete, and Multi-objective Problems[J]. Neural Computing and Applications, 2016, 27(4):1053-1073. |
| [17] | MIRJALILI S Z, MIRJALILI S, SAREMI S, et al. Grasshopper Optimization Algorithm for Multi-objective Optimization Problems[J]. Applied Intelligence, 2018, 48(4):805-820. |
| [18] | MIRJALILI S, JANGIR P, MIRJALILI S Z, et al. Optimization of Problems with Multiple Objectives Using the Multi-verse Optimization Algorithm[J]. Knowledge-Based Systems, 2017, 134:50-71. |
| [1] | 李明磊, 贾育秦, 张学良, 刘丽琴, 杜娟, 温淑花, 兰国生. 基于多目标差异演化算法的并联机构结构优化 [J]. J4, 201016, 21(16): 1915-1920. |
| [2] | 林述温, 陆哲, 危世佳, 陈剑雄, 顾天奇, 谢钰. 挖掘机工作过程动力特性仿真及主构件参数多目标优化设计方法[J]. 中国机械工程, 2025, 36(06): 1371-1379. |
| [3] | 饶远1, 孙见君1, 闻兰2. 扩压式自泵送机械密封端面的液膜汽化及其结构优化研究[J]. 中国机械工程, 2025, 36(05): 933-941,953. |
| [4] | 张道德, 卢子健, 赵坤, 杨智勇. 非平坦环境下履带机器人多目标路径规划方法研究[J]. 中国机械工程, 2025, 36(02): 305-314. |
| [5] | 王志强1, 韩建海1, 2, 3, 李向攀1, 2, 郭冰菁1, 2, 杜敢琴4. 冗余机器人的笛卡儿空间螺旋线性插值轨迹规划[J]. 中国机械工程, 2025, 36(01): 104-112. |
| [6] | 刘桂源1, 王曾2, 杨子艺2, 胡明珠1, 刘怀举1. 航空发动机附件机匣齿轮传动设计分析软件开发与应用[J]. 中国机械工程, 2024, 35(11): 1938-1947. |
| [7] | 胡福清, 孙江宏, 孙英杰, 孙雨彤, 马超, 周福强, . 基于新型旋转直线往复机构的切片机设计分析及参数优化[J]. 中国机械工程, 2024, 35(04): 614-623,635. |
| [8] | 魏书鹏, 唐红涛, 李西兴, 杨冠宇, 张健. 考虑双资源约束的柔性机械加工车间逆调度问题研究[J]. 中国机械工程, 2024, 35(03): 457-471. |
| [9] | 荣誉, 陈刚, 豆天赐, . 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(02): 305-316. |
| [10] | 刘毅, 易旺民, 姚建涛, 王兴达, 余鹏, 赵永生. 狭长空间内重载调姿装配机器人的设计与研究[J]. 中国机械工程, 2024, 35(02): 324-336. |
| [11] | 程基彬, 戴宁, 郭培, 熊继源, 叶世伟, 程筱胜. 基于力学超材料的柔性机械臂设计技术[J]. 中国机械工程, 2023, 34(16): 1900-1906. |
| [12] | 屈力刚, 苏岩, 邢宇飞. 基于SHO-NSGA混合算法的飞机油舱管路自动布局方法[J]. 中国机械工程, 2023, 34(15): 1864-1872. |
| [13] | 吴超群, 赵松, 雷艇. 曲线焊缝的机器人焊接轨迹规划与高频控制[J]. 中国机械工程, 2023, 34(14): 1723-1728. |
| [14] | 李佳璇, 李论, 周波, 赵吉宾, 朱光, 王正佳, . 基于Preston-PSO算法的多方向机器人磨抛轨迹生成方法[J]. 中国机械工程, 2023, 34(14): 1729-1740. |
| [15] | 刘栋财, 董广宇, 杜玉红, 李文鹏, . 基于网格搜索算法的6-RUS并联机器人时间最优轨迹规划[J]. 中国机械工程, 2023, 34(13): 1589-1598. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||