


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (9): 2140-2149.DOI: 10.3969/j.issn.1004-132X.2025.09.026
• 工程前沿 • 上一篇
张益鑫( ), 苗忆南, 易智恒, 万文静, 王兴坚, 曾松, 王少萍()
), 苗忆南, 易智恒, 万文静, 王兴坚, 曾松, 王少萍()
收稿日期:2024-06-13
出版日期:2025-09-25
发布日期:2025-10-15
通讯作者:
王少萍
作者简介:张益鑫,男,1990年生,博士后研究人员。研究方向为智能机器人及机电系统建模控制。E-mail:zhang_yixin@buaa.edu.cn基金资助:
Yixin ZHANG(), Yinan MIAO, Zhiheng YI, Wenjing WAN, Xingjian WANG, Song ZENG, Shaoping WANG()
Received:2024-06-13
Online:2025-09-25
Published:2025-10-15
Contact:
Shaoping WANG
摘要:
面向油-气管道日常维护和检测的重大需求,提出了一种具有自适应变形能力的模块化管道检测机器人RoboChain-Ⅰ。与多数轮式管道机器人不同,该机器人采用细胞启发的模块化仿生设计,具备更灵活的关节冗余转动自由度,可根据管道形状及管径变化主动变形。单体模块采用双轮独立驱动,前后各设置一对俯仰、偏航作动机构,模块间由可被动伸缩的弹簧阻尼支撑结构或可控电磁吸附分离的刚性结构连接,提高了机器人复杂管道通过能力和适应性。对机器人管道内运动受力进行建模,利用Adams实现其运动学仿真,对模型设计参数选择进行了验证。最终,RoboChain-Ⅰ完成了地面、直管、弯管、变径管道及整机子母主动分离的通过实验,验证了机器人在175~440 mm管径范围内实现三维复杂管网检测作业的有效性和可靠性,最大运动速度达0.87 m/s(地面)与0.4 m/s(管内)。
中图分类号:
张益鑫, 苗忆南, 易智恒, 万文静, 王兴坚, 曾松, 王少萍. 新型可变形串联管道检测机器人:设计、建模及实验[J]. 中国机械工程, 2025, 36(9): 2140-2149.
Yixin ZHANG, Yinan MIAO, Zhiheng YI, Wenjing WAN, Xingjian WANG, Song ZENG, Shaoping WANG. A Novel Deformable Serial Pipeline Inspection Robots:Design, Modeling and Experimentation[J]. China Mechanical Engineering, 2025, 36(9): 2140-2149.
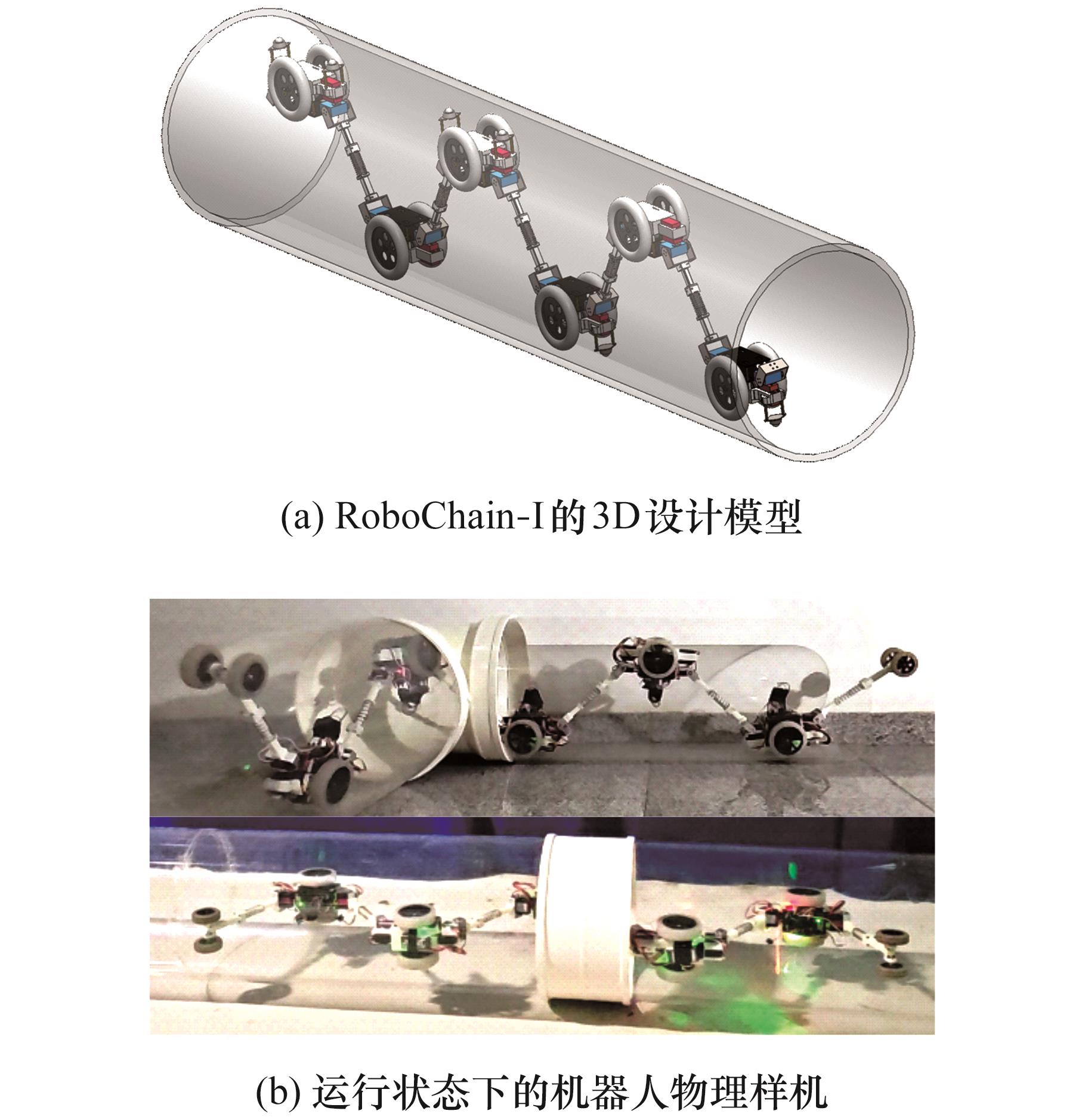
图1 RoboChain-Ⅰ的3D设计模型及样机实物
Fig.1 3D design model and prototype of the RoboChain-Ⅰ
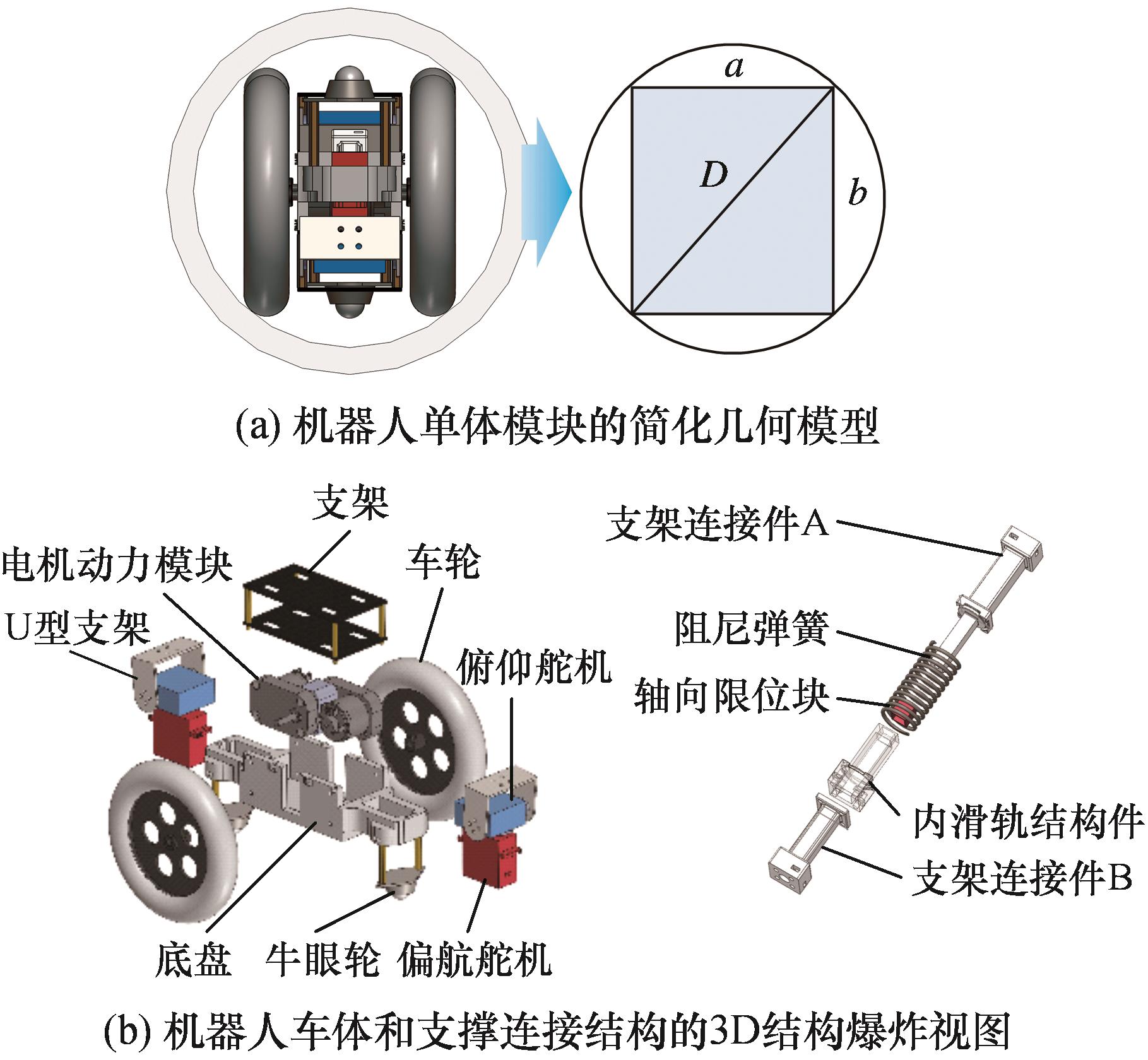
图2 机器人单体模块的简化几何模型及结构爆炸视图
Fig.2 Simplified geometric model and 3D structural explosion view of the robot single module
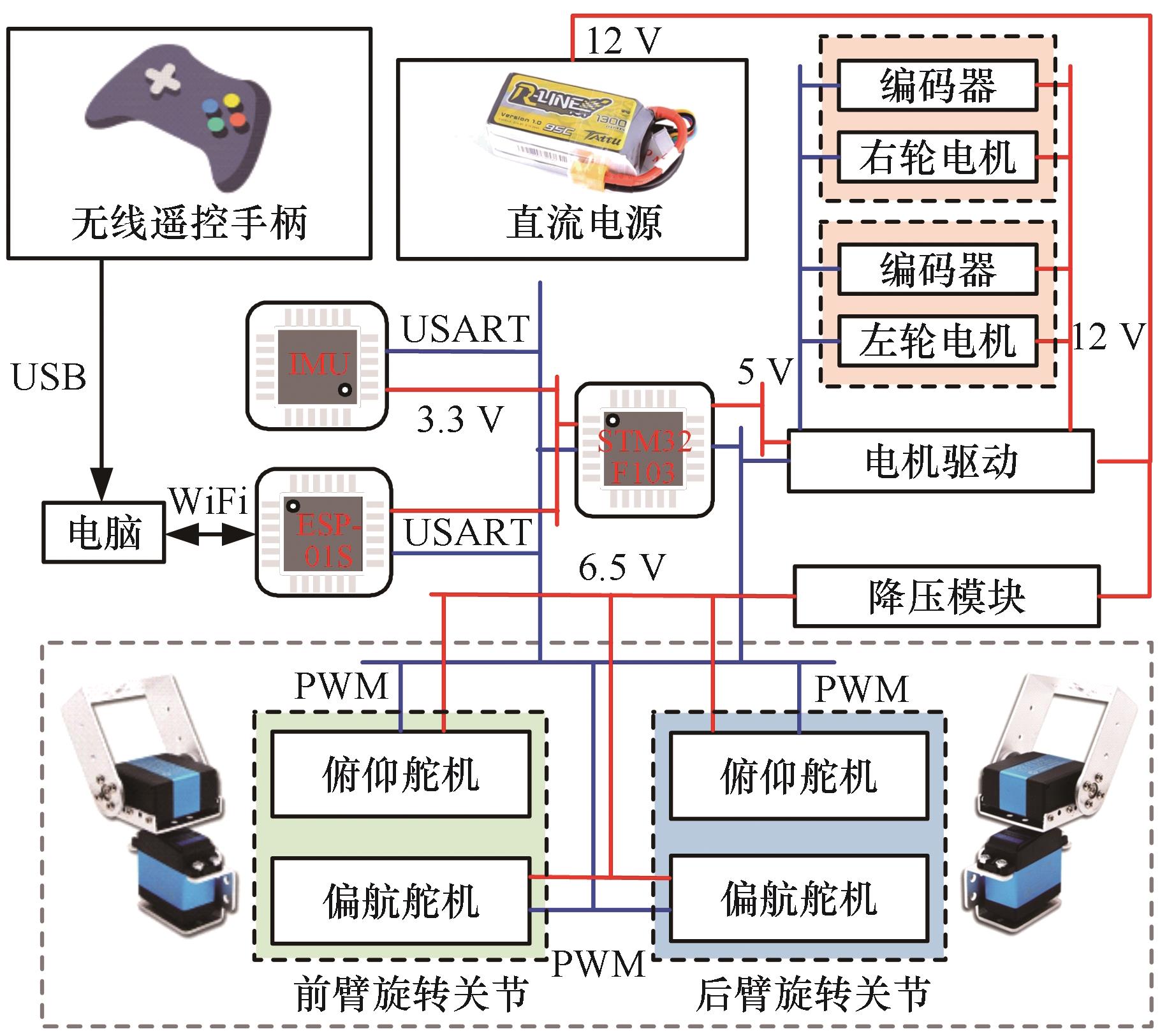
图3 RoboChain-Ⅰ单体模块电控系统
Fig.3 Electronic control system of a single module of RoboChain-Ⅰ
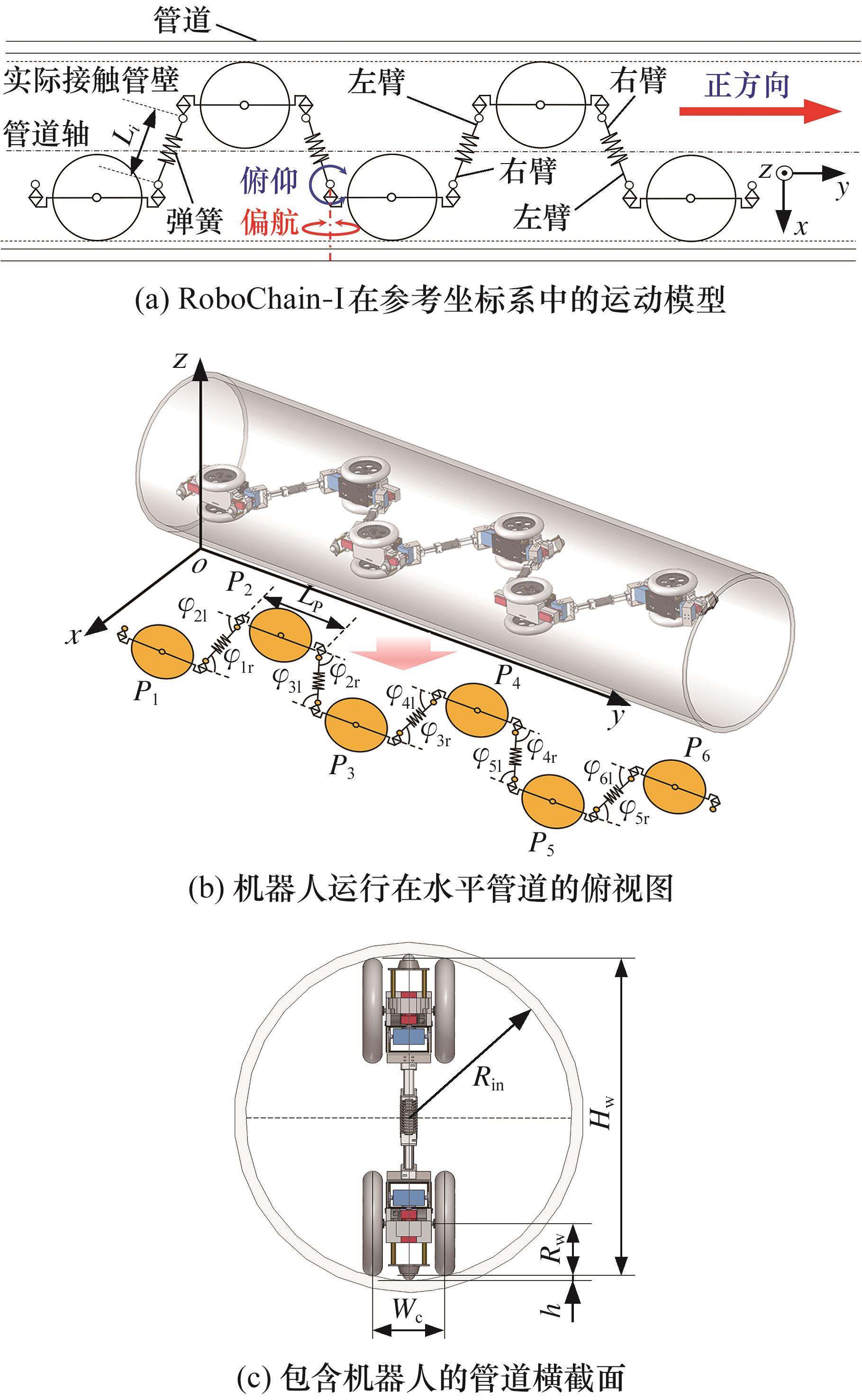
图4 机器人在坐标系中的运动模型及相关参数定义
Fig.4 Motion model diagram and related parameter definitions of the robot in coordinate frame
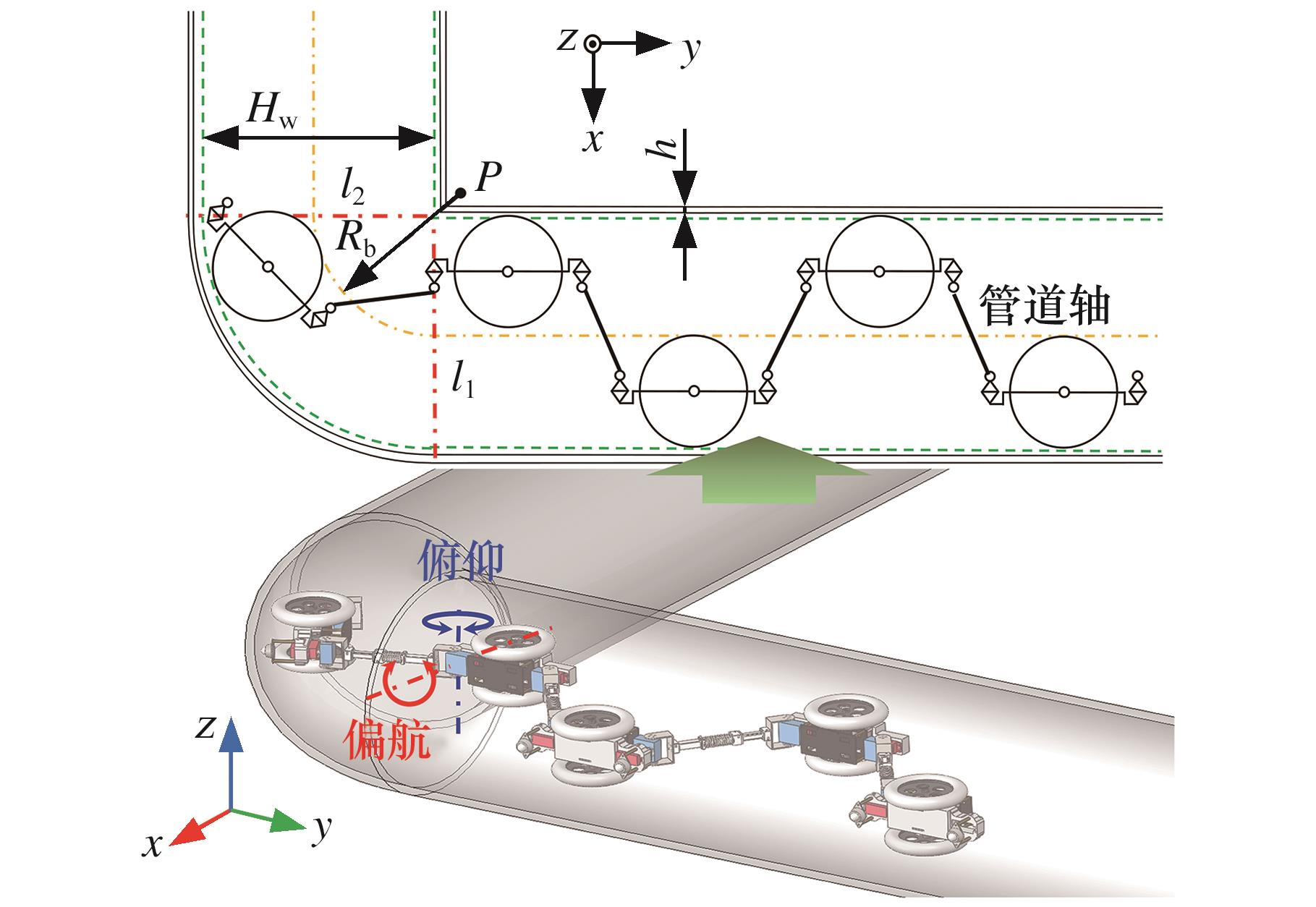
图5 RoboChain-Ⅰ在L形管道中的转弯运动
Fig.5 Turning motion of RoboChain-Ⅰ in L-shaped pipe
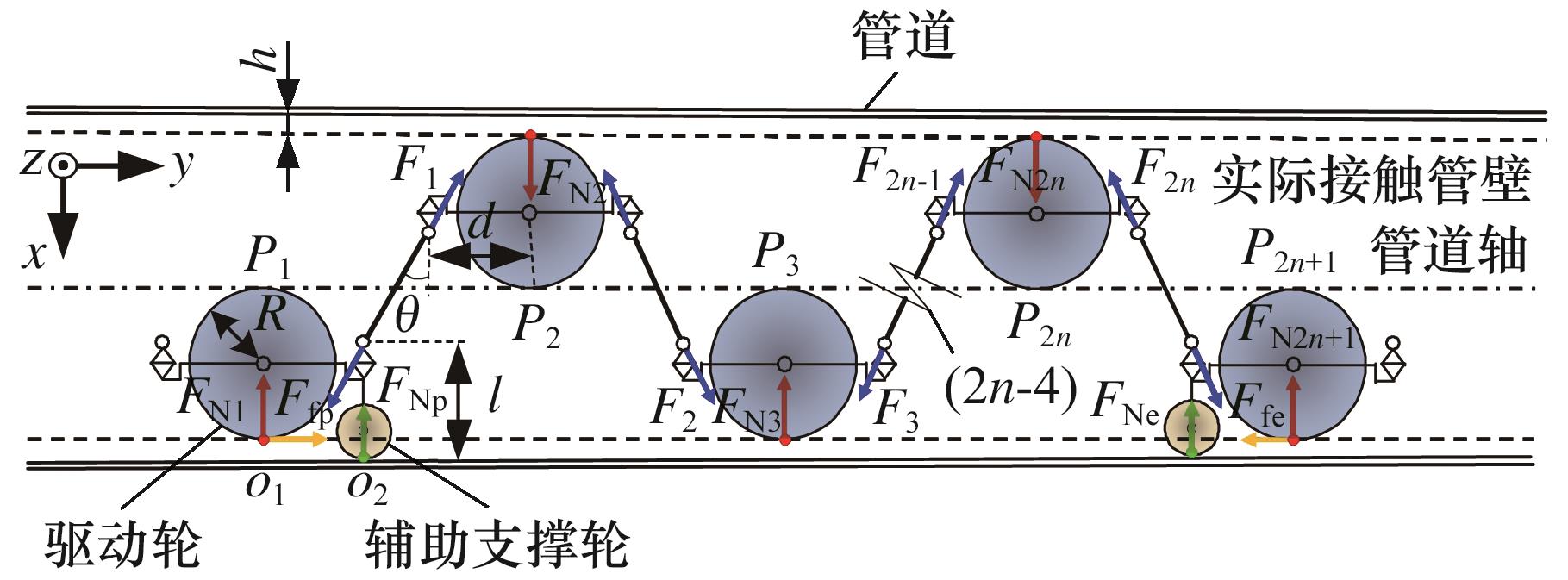
图6 RoboChain-Ⅰ的静力学分析
Fig.6 Static Analysis of RoboChain-Ⅰ
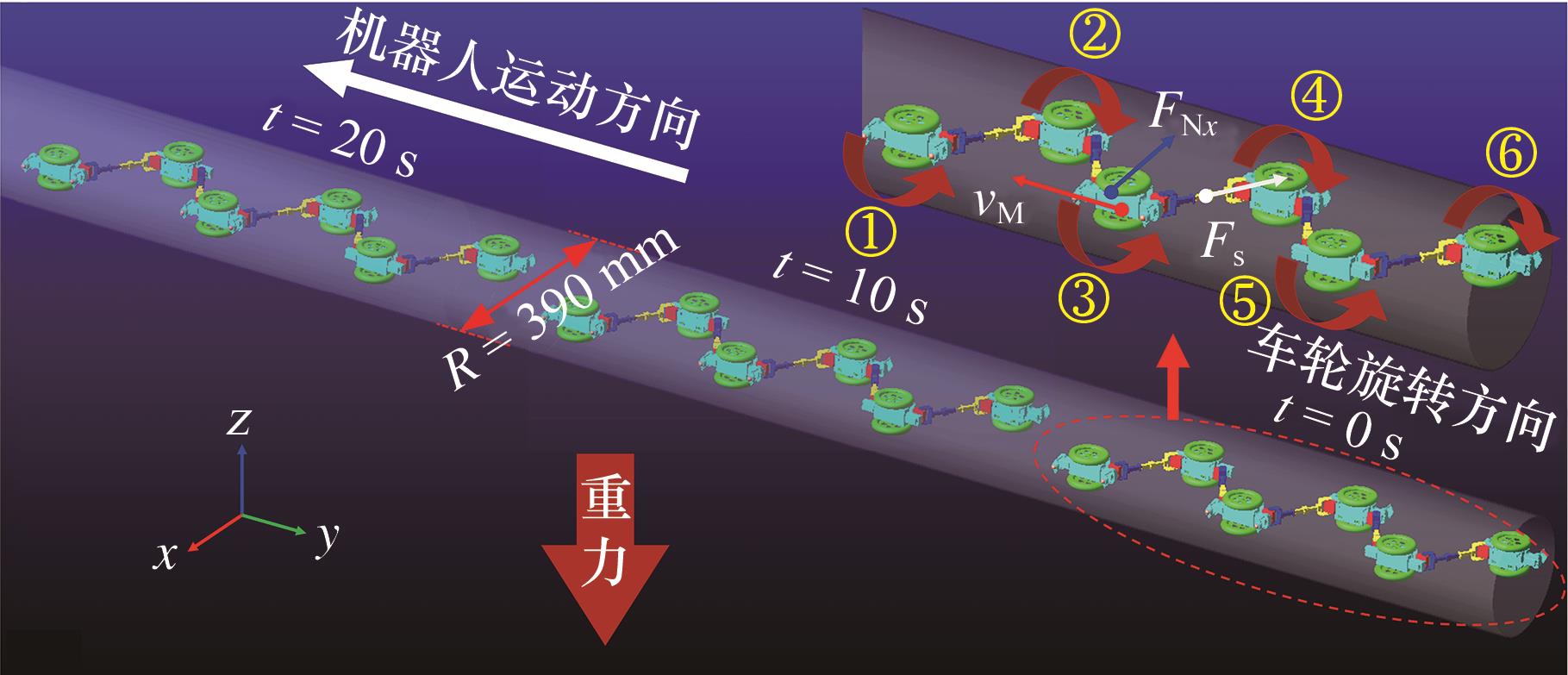
图7 RoboChain-Ⅰ运行在水平直管道中的仿真模型
Fig.7 Simulation of RoboChain-Ⅰ driving in horizontal straight pipe
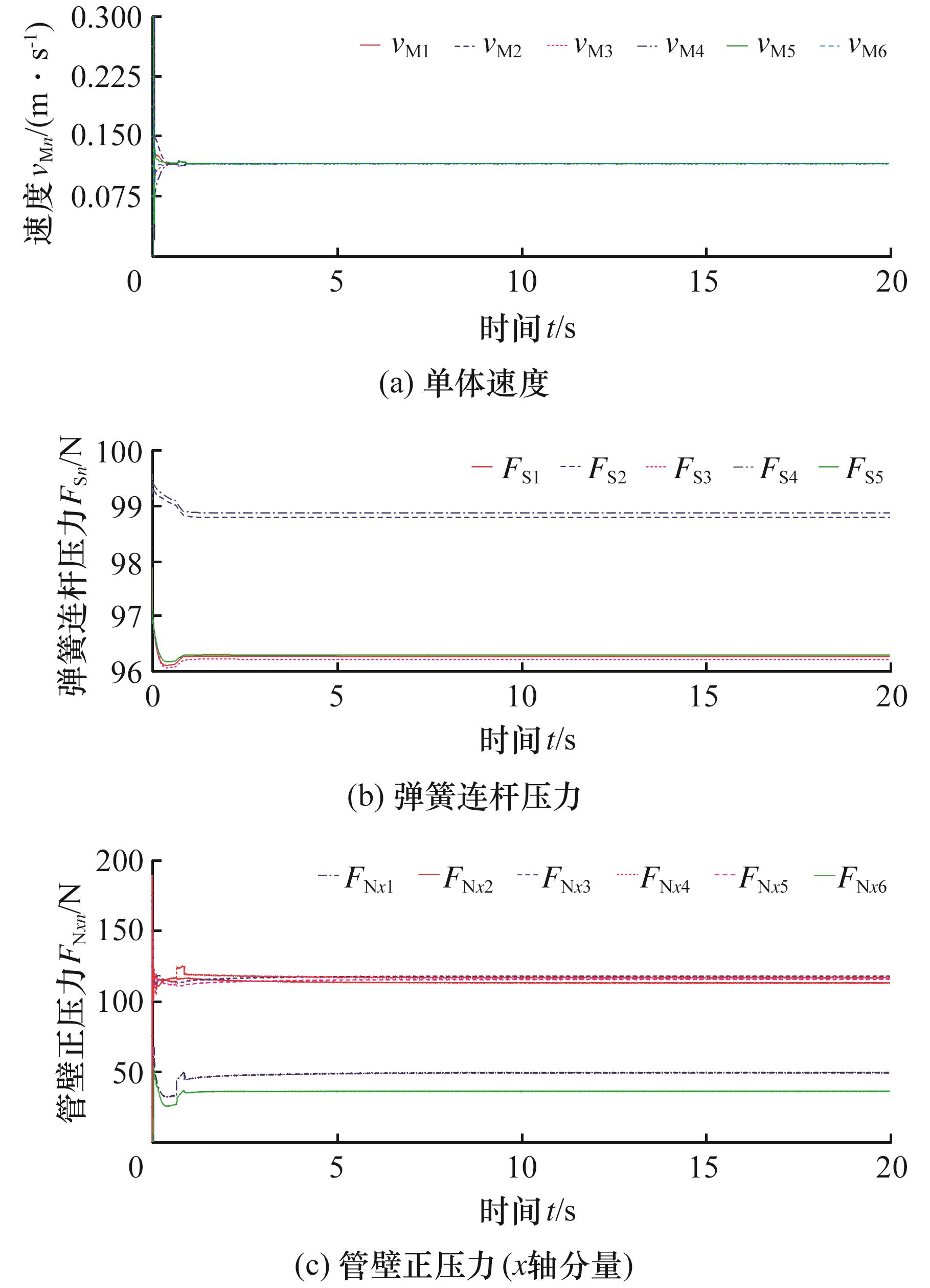
图8 机器人管内运动仿真结果曲线
Fig.8 Simulation results of robot motion in pipe
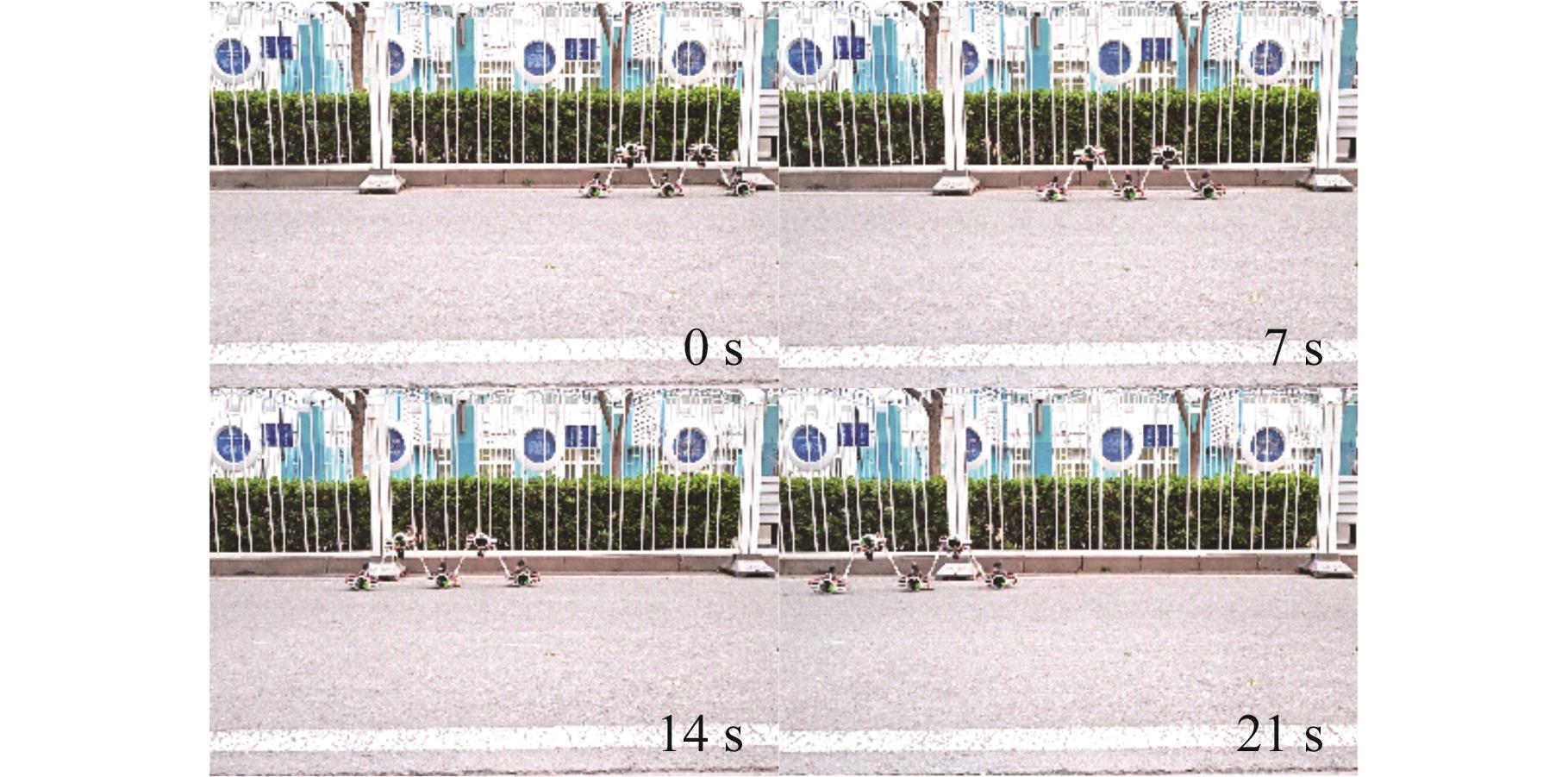
图9 地面运动的实验验证
Fig.9 Experimental validation of motion on the ground
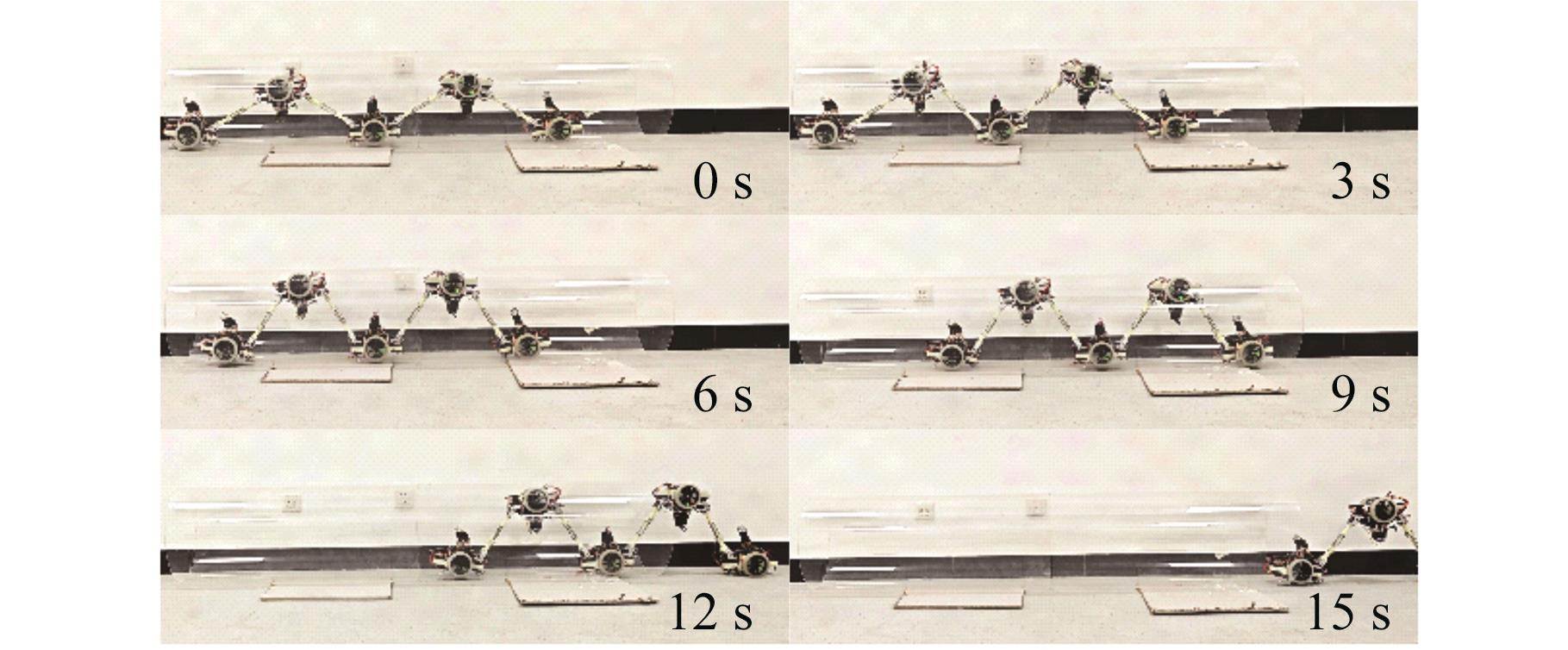
图10 水平管道内运动的实验验证
Fig.10 Experimental validation of motion in horizontal pipe
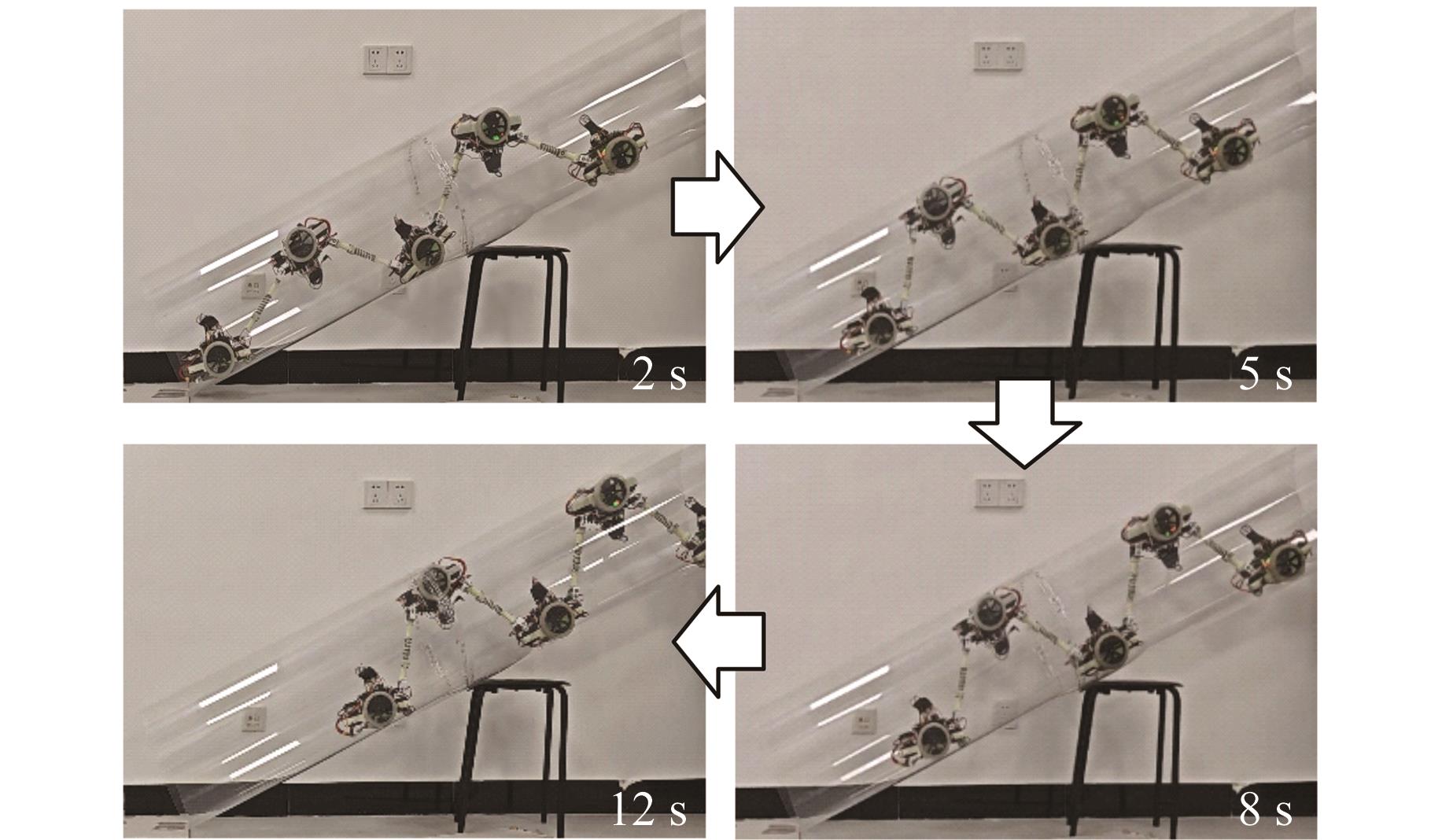
图11 倾角为30°的倾斜管道内运动的实验验证
Fig.11 Experimental validation of motion in inclined pipe with an inclination angle of 30°
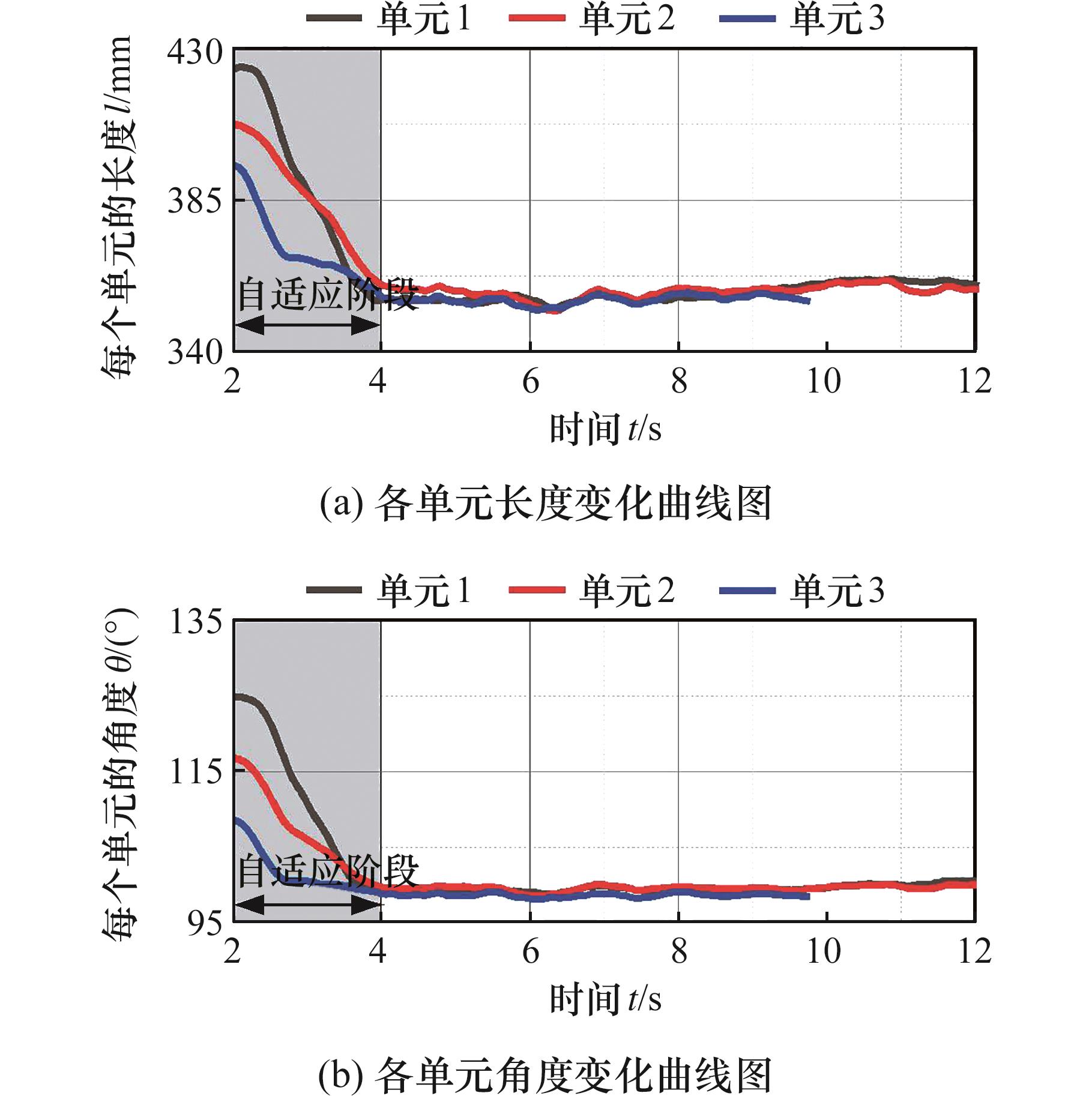
图12 倾角为30°的倾斜管道内运动的实验结果曲线
Fig.12 Experimental results of motion in inclined pipe with an inclination angle of 30°
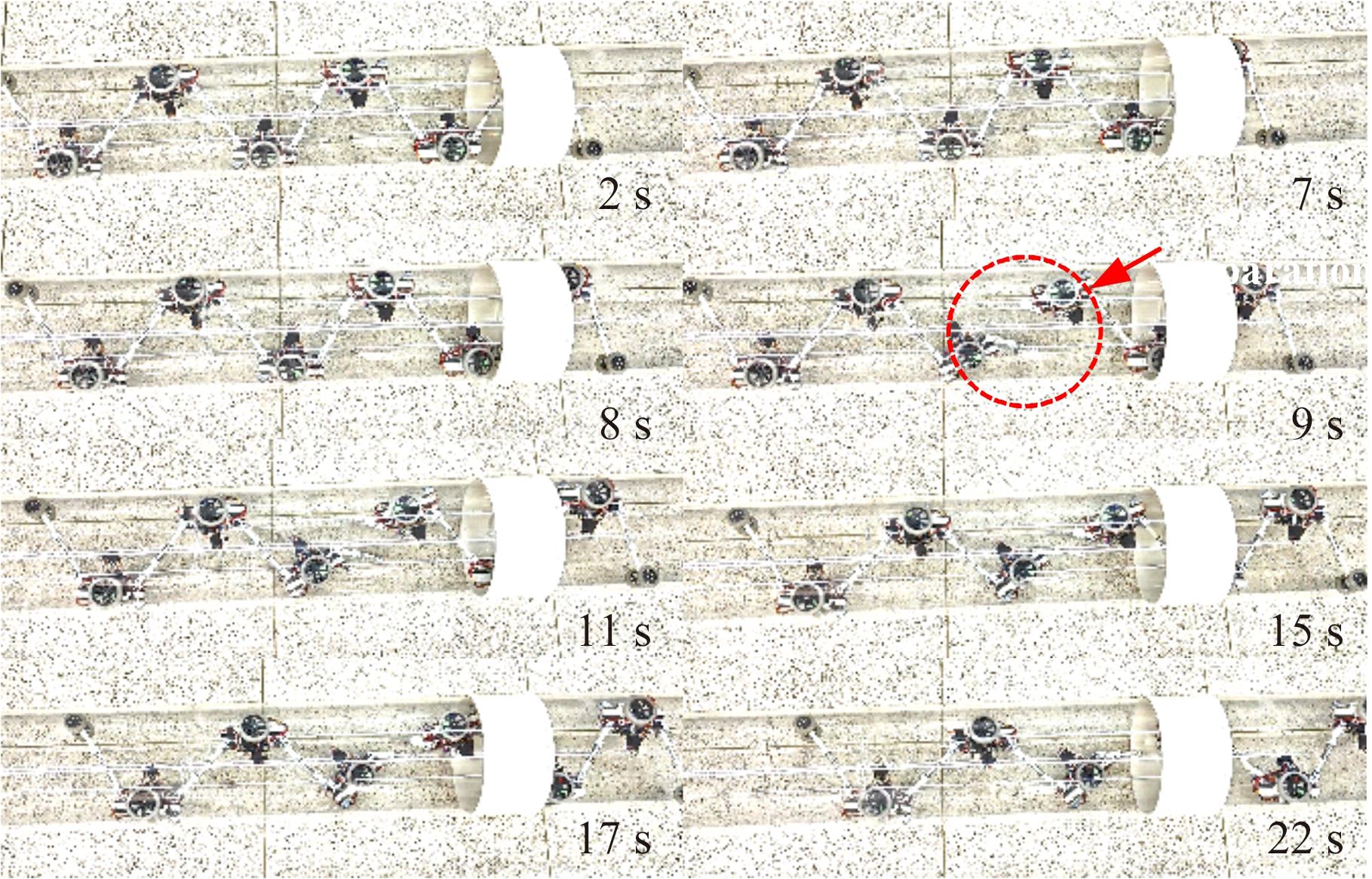
图13 机器人最小运动单体受控分离实验验证
Fig.13 Experimental validation of controlled separation of robot’s minimal motion unit
| 参数 | 数值 |
|---|---|
| 可检测管径范围/mm | 175 ~ 440 |
| 地表最大运动速度/(m·s-1) | 0.87 |
| 管内最大运动速度/(m·s-1) | 0.4 |
| 最大转弯速度/(rad·s-1) | 0.3 |
| 弹簧杆可承受外力范围/N | 20 ~ 120 |
| 弹簧杆长度变化范围/mm | 160 ~ 200 |
| 操作电压/V | 12 |
表1 RoboChain-Ⅰ样机实际运动性能参数
Tab.1 Motion performance parameters of the RoboChain-Ⅰ
| 参数 | 数值 |
|---|---|
| 可检测管径范围/mm | 175 ~ 440 |
| 地表最大运动速度/(m·s-1) | 0.87 |
| 管内最大运动速度/(m·s-1) | 0.4 |
| 最大转弯速度/(rad·s-1) | 0.3 |
| 弹簧杆可承受外力范围/N | 20 ~ 120 |
| 弹簧杆长度变化范围/mm | 160 ~ 200 |
| 操作电压/V | 12 |
| [1] | 胡灯明, 骆晖. 国内外天然气管道事故分析[J]. 石油工业技术监督, 2009, 25(9):8-12. |
| HU Dengming, LUO Hui. The Analysis of Accidents on Foreign and Domestic Natural Gas Pipelines[J]. Technology Supervision in Petroleum Industry, 2009, 25(9):8-12. | |
| [2] | 赵汉青. 我国油气管道的事故成因及环境预防措施[J]. 油气储运, 2015, 34(4):368-372. |
| ZHAO Hanqing. Causes of Oil and Gas Pipeline Incidents in China and Environmental Precautions[J]. Oil & Gas Storage and Transportation, 2015, 34(4):368-372. | |
| [3] | SALAZAR-BAÑO A G, CHAS-AMIL M L, RUZO-SANMARTÍN E, et al. The Key Role of Risk Perception in Preparedness for Oil Pipeline Accidents in Urban Areas:a Sequential Mediation Analysis[J]. The Extractive Industries and Society, 2024, 17:101398. |
| [4] | DEBENEST P, GUARNIERI M, HIROSE S. PipeTron Series—Robots for Pipe Inspection[C]∥Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry. Foz do Iguassu, 2014:1-6. |
| [5] | VERMA A, KAIWART A, DUBEY N D, et al. A Review on Various Types of In-pipe Inspection Robot[J]. Materials Today:Proceedings, 2022, 50:1425-1434. |
| [6] | SHAO Lei, WANG Yi, GUO Baozhu, et al. A Review over State of the Art of In-pipe Robot[C]∥2015 IEEE International Conference on Mechatronics and Automation (ICMA). Beijing, 2015:2180-2185. |
| [7] | TANG Chao, DU Boyuan, JIANG Songwen, et al. A Pipeline Inspection Robot for Navigating Tubular Environments in the Sub-centimeter Scale[J]. Science Robotics, 2022, 7(66):eabm8597. |
| [8] | ISMAIL I N, ANUAR A, SAHARI K S M, et al. Development of In-pipe Inspection Robot:a Review[C]∥2012 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology (STUDENT). Kuala Lumpur, 2012:310-315. |
| [9] | TANAKA M, TANAKA K. Control of a Snake Robot for Ascending and Descending Steps[J]. IEEE Transactions on Robotics, 2015, 31(2):511-520. |
| [10] | KIM H M, CHOI Y S, LEE Y G, et al. Novel Mechanism for In-pipe Robot Based on a Multiaxial Differential Gear Mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1):227-235. |
| [11] | 郭登辉, 陈原. 管道攀爬机器人非接触变磁隙式永磁吸附机构的设计与吸附性能优化[J]. 中国机械工程, 2021, 32(14):1659-1668. |
| GUO Denghui, CHEN Yuan. Design and Adsorption Performance Optimization of Non-contact Variable Magnetic Gap Type Permanent Magnet Absorption Mechanisms of Pipe Climbing Robots[J]. China Mechanical Engineering, 2021, 32(14):1659-1668. | |
| [12] | ROH S G, CHOI H R. Differential-drive In-pipe Robot for Moving Inside Urban Gas Pipelines[J]. IEEE Transactions on Robotics, 2005, 21(1):1-17. |
| [13] | KAKOGAWA A, MA Shugen. Design of a Multilink-articulated Wheeled Pipeline Inspection Robot Using Only Passive Elastic Joints[J]. Advanced Robotics, 2018, 32(1):37-50. |
| [14] | KAKOGAWA A, MA Shugen. A Multi-link In-pipe Inspection Robot Composed of Active and Passive Compliant Joints[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, 2020:6472-6478. |
| [15] | LIU Yahong, SUN Yi, CAO Kai, et al. Wheel-legged In-pipe Robot with a Bioinspired Hook and Dry Adhesive Attachment Device[J]. Journal of Bionic Engineering, 2024, 21(3):1208-1222. |
| [16] | FANG Delei, JIA Guofeng, WU Junran, et al. A Novel Worm-like In-pipe Robot with the Rigid and Soft Structure[J]. Journal of Bionic Engineering, 2023, 20(6):2559-2569. |
| [17] | ZHANG Yixin, CHEN Hanli, WANG Lu, et al. Design of a Novel Modular Serial Pipeline Inspection Robot[C]∥2023 IEEE International Conference on Mechatronics and Automation (ICMA). Harbin, 2023:1847-1852. |
| [18] | SAWABE H, NAKAJIMA M, TANAKA M, et al. Control of an Articulated Wheeled Mobile Robot in Pipes[J]. Advanced Robotics, 2019, 33(20):1072-1086. |
| [1] | 袁志群, 李曰瀚, 林立, 孙鹏飞, 张义, . 风车桥气动干扰作用下的汽车纵横向协调控制[J]. 中国机械工程, 2024, 35(04): 731-741. |
| [2] | 董振乐, 杨英浩, 姚建勇, 张政, 李阁强, 王帅. 匹配和不匹配干扰共存时电液伺服系统预设性能渐近跟踪控制[J]. 中国机械工程, 2022, 33(20): 2437-2443. |
| [3] | 潘国威, 陈文亮. 冗余混联式钻铆机床姿态调整轨迹优化[J]. 中国机械工程, 2021, 32(21): 2571-2576,2589. |
| [4] | 李敬仪, 姚立纲, 东辉. 基于三组测量绳结构的软体机械臂运动检测[J]. 中国机械工程, 2021, 32(06): 721-728. |
| [5] | 程贤福1;周健1;肖人彬2;刘俊杰1;游敏华1. 面向绿色制造的产品模块化设计研究综述[J]. 中国机械工程, 2020, 31(21): 2612-2625. |
| [6] | 李浩, 陶飞, 文笑雨, 王昊琪, 罗国富. [产品服务系统]面向大规模个性化的产品服务系统模块化设计[J]. 中国机械工程, 2018, 29(18): 2204-2214,2249. |
| [7] | 肖超, 周玉林, 盛海泳, 侯雨雷. 工业机器人机械本体模块化设计[J]. 中国机械工程, 2016, 27(08): 1018-1025. |
| [8] | 杨继森, 张静. 时栅角位移传感器自动检定系统[J]. 中国机械工程, 2015, 26(14): 1932-1937. |
| [9] | 程鑫, 吴华春, 胡业发, 周云飞. 并行多处理器运动控制系统中的分布式存储机制[J]. 中国机械工程, 2014, 25(8): 1041-1046. |
| [10] | 童亮, 王准. 基于直线电机的高速滚珠丝杠副寿命试验机设计[J]. 中国机械工程, 2014, 25(13): 1711-1714. |
| [11] | 宋小春, 陈雨, 许正望, 吴英. 储罐底板自动漏磁检测小车的路径规划与运动控制[J]. 中国机械工程, 2014, 25(12): 1634-1638. |
| [12] | 林立明1, 2, 于东2, 3, 胡毅2, 3, 秦承刚1, 2, 王志成2, 3, 陆小虎1, 2. 一种嵌入式总线运动控制器的实时系统设计[J]. 中国机械工程, 2013, 24(4): 494-499. |
| [13] | 王峰1, 2, 林浒2, 刘峰1, 2, 郑飂默2, 郑一麟1, 2. 平底刀五轴端铣3D刀补中运动突变的检测算法[J]. 中国机械工程, 2013, 24(15): 1989-1995. |
| [14] | 葛新锋. 七自由度自动铺丝机器人的自运动流形分析[J]. 中国机械工程, 2013, 24(12): 1591-1595. |
| [15] | 李浩1, 祁国宁2, 纪杨建2, 顾新建2. 面向服务的产品模块化设计方法及其展望[J]. 中国机械工程, 2013, 24(12): 1687-1695. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||