

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (11): 2704-2709.DOI: 10.3969/j.issn.1004-132X.2025.11.028
Previous Articles Next Articles
Quanyin YANG1( ), Yuning ZHANG1, Tong XIAO1, Jinlong LIANG1, Jintao WANG2, Jinting XU1()
), Yuning ZHANG1, Tong XIAO1, Jinlong LIANG1, Jintao WANG2, Jinting XU1()
Received:2024-10-25
Online:2025-11-25
Published:2025-12-09
Contact:
Jinting XU
杨权印1(), 张宇宁1, 肖铜1, 梁金龙1, 王金涛2, 徐金亭1()
通讯作者:
徐金亭
作者简介:杨权印,男,2000年生,硕士研究生。研究方向为机器人加工技术。E-mail: 15670882921@163.com基金资助:CLC Number:
Quanyin YANG, Yuning ZHANG, Tong XIAO, Jinlong LIANG, Jintao WANG, Jinting XU. Robotic Grinding Path Generation Method Guided by CAD for Automobile Wheel Hubs[J]. China Mechanical Engineering, 2025, 36(11): 2704-2709.
杨权印, 张宇宁, 肖铜, 梁金龙, 王金涛, 徐金亭. CAD图形制导的汽车轮毂机器人打磨路径生成方法[J]. 中国机械工程, 2025, 36(11): 2704-2709.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.11.028
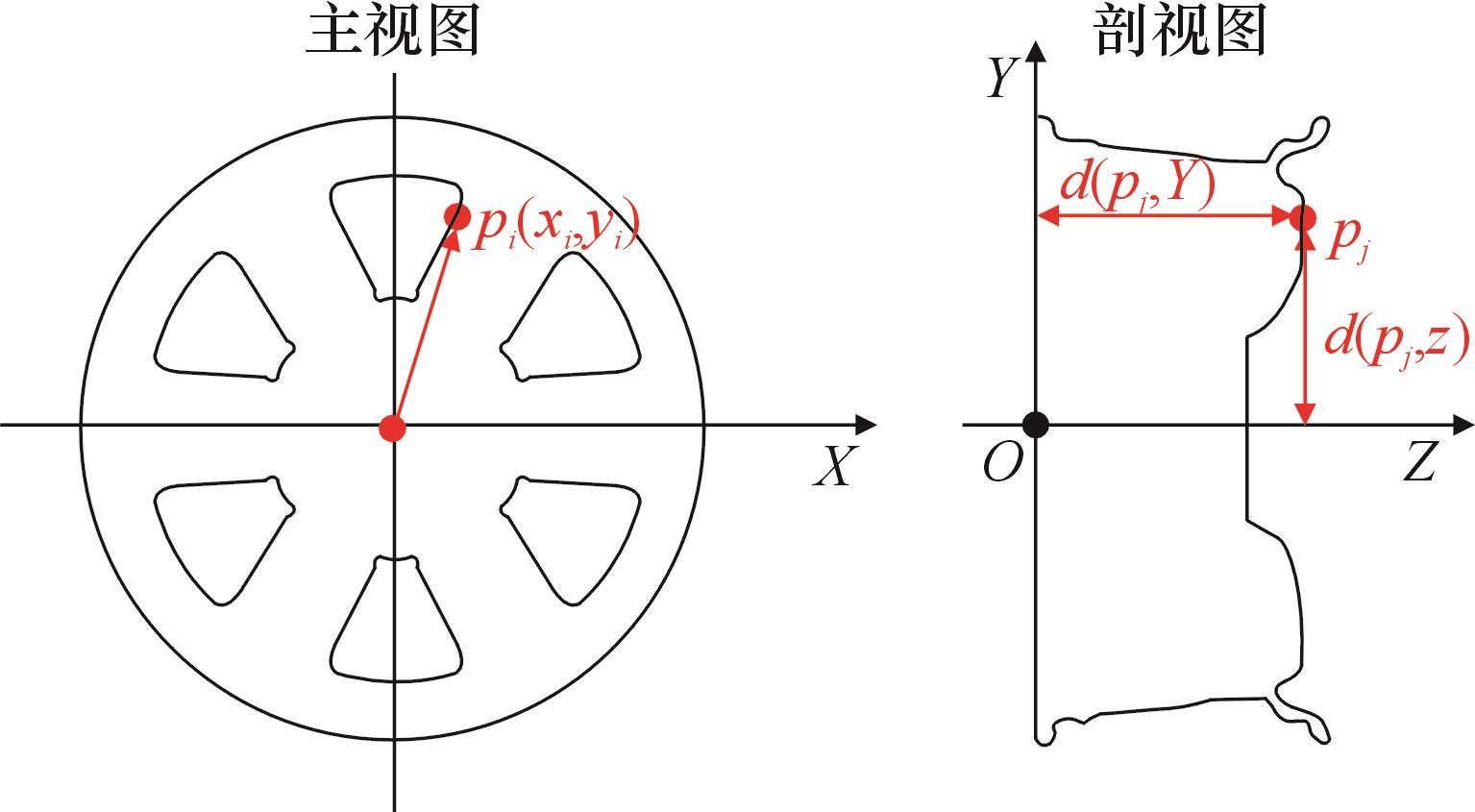
Fig. 1 Point correspondence between main and section view of automobile wheel hubs
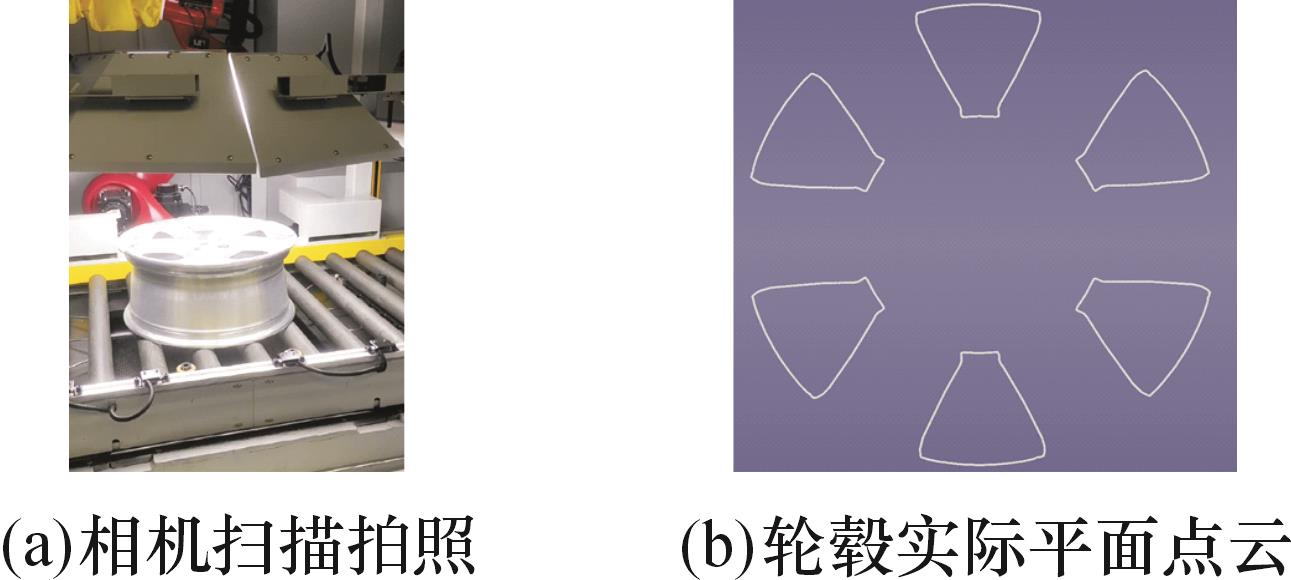
Fig.2 Measurement and extraction of side edge contour of wheel hub hole based on 2D industrial camera
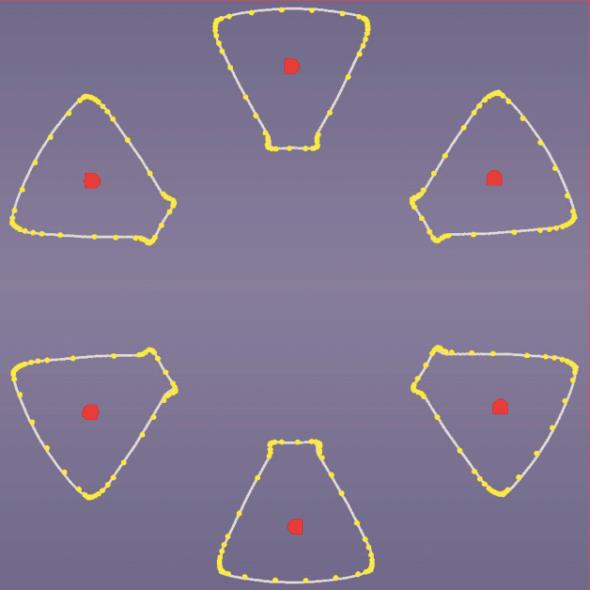
Fig. 3 Registration between the measured profile and the theoretical profile
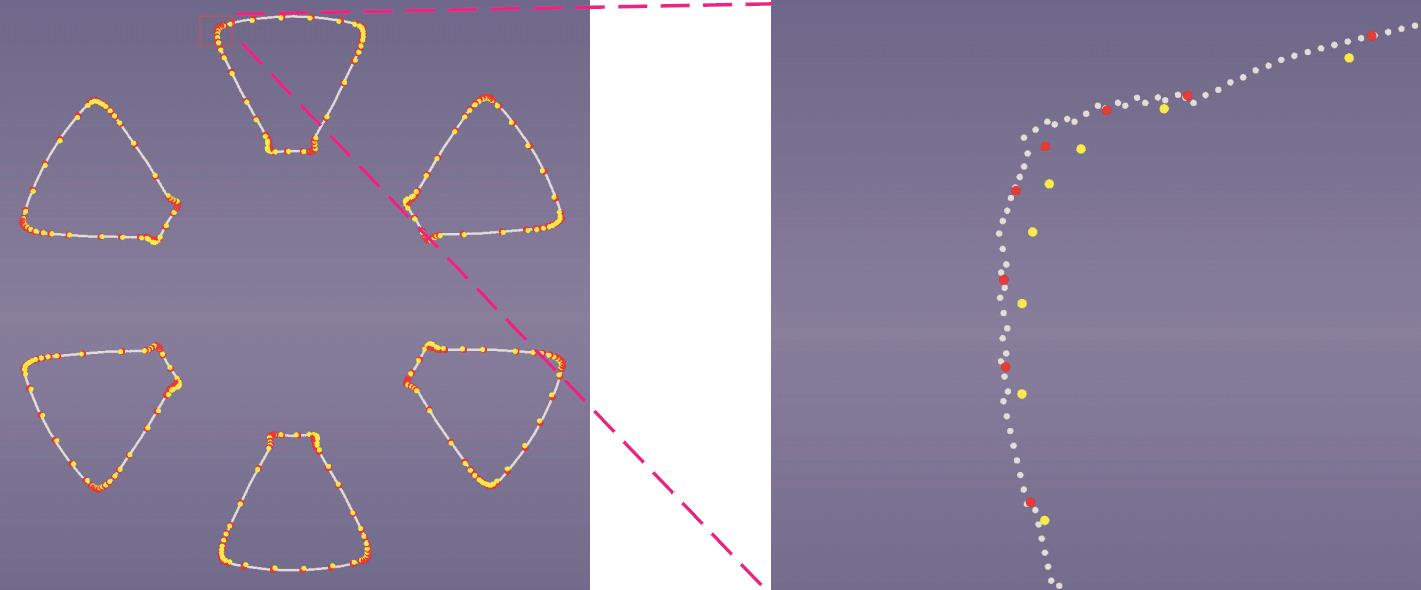
Fig. 4 Adaptive adjustment results for robotic wheel grinding paths
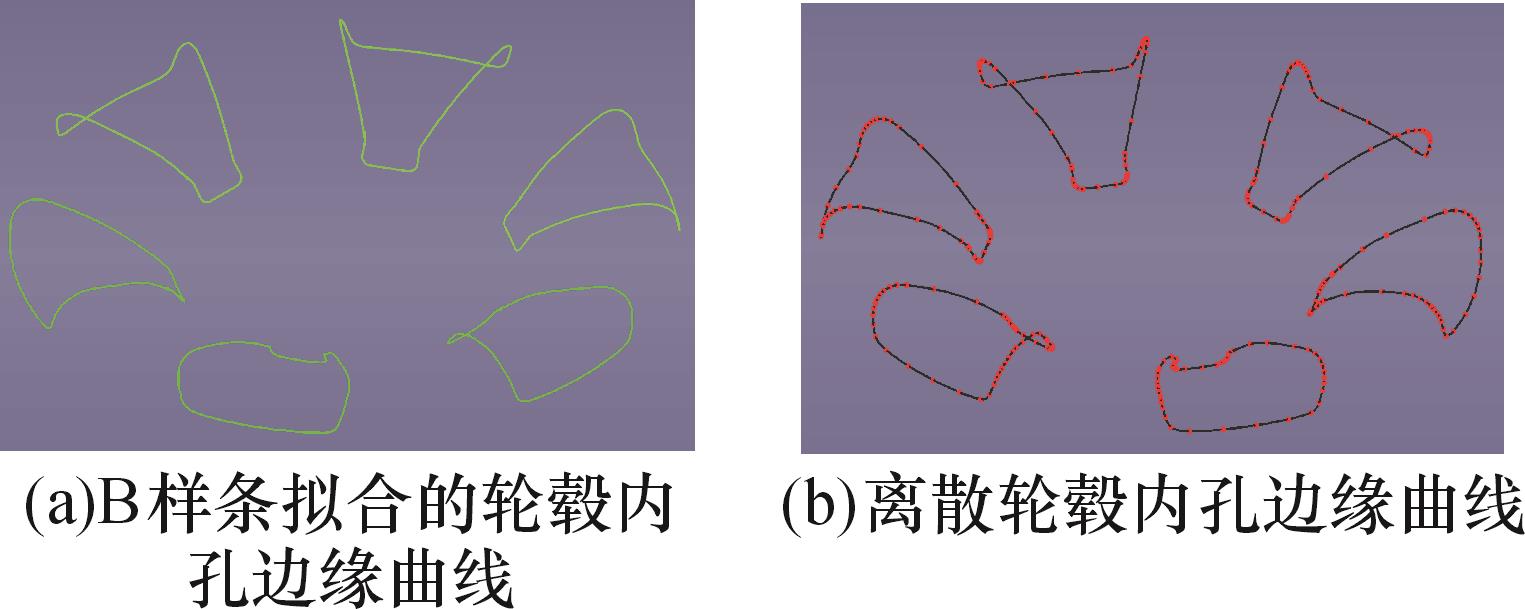
Fig. 5 Fitting of actual grinding paths and discrete results with specified accuracy
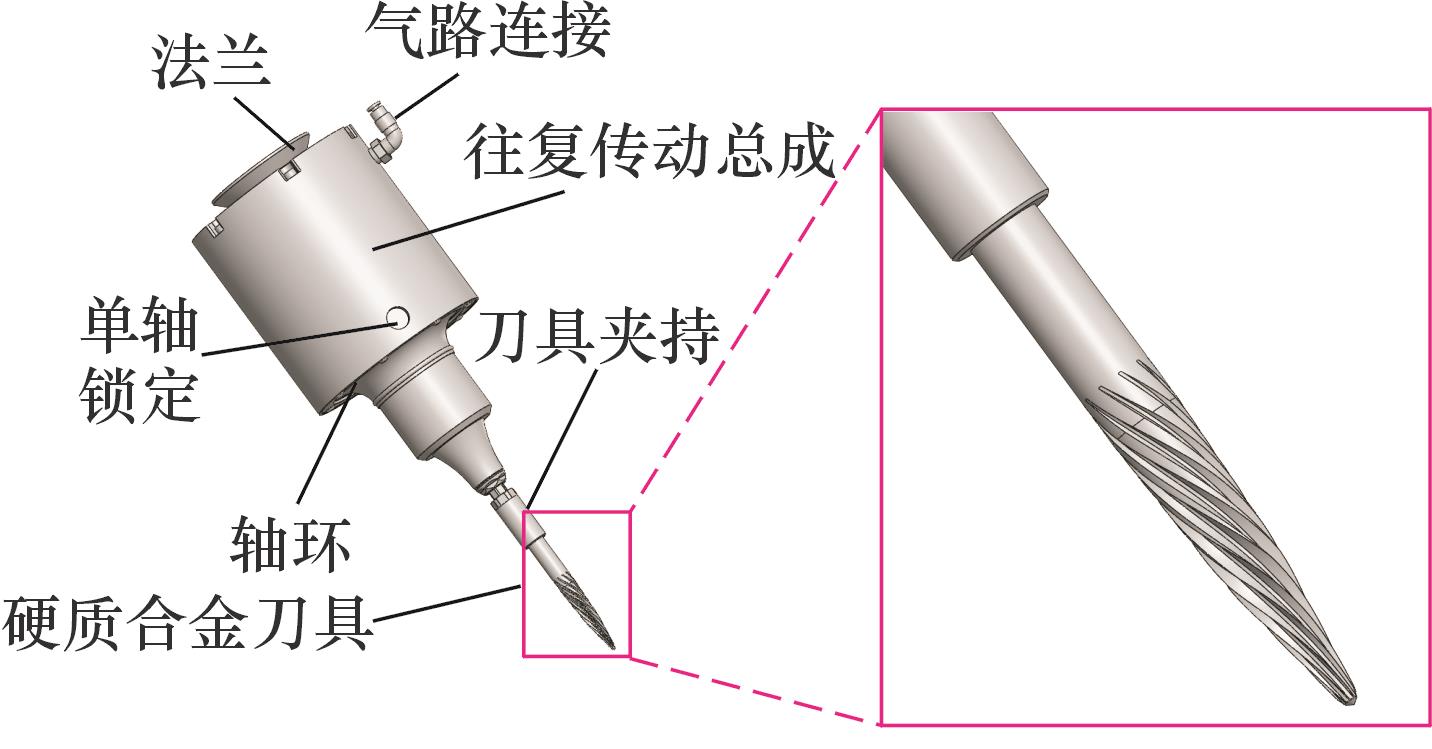
Fig. 6 Wheel hub grinding robot end-tool composition
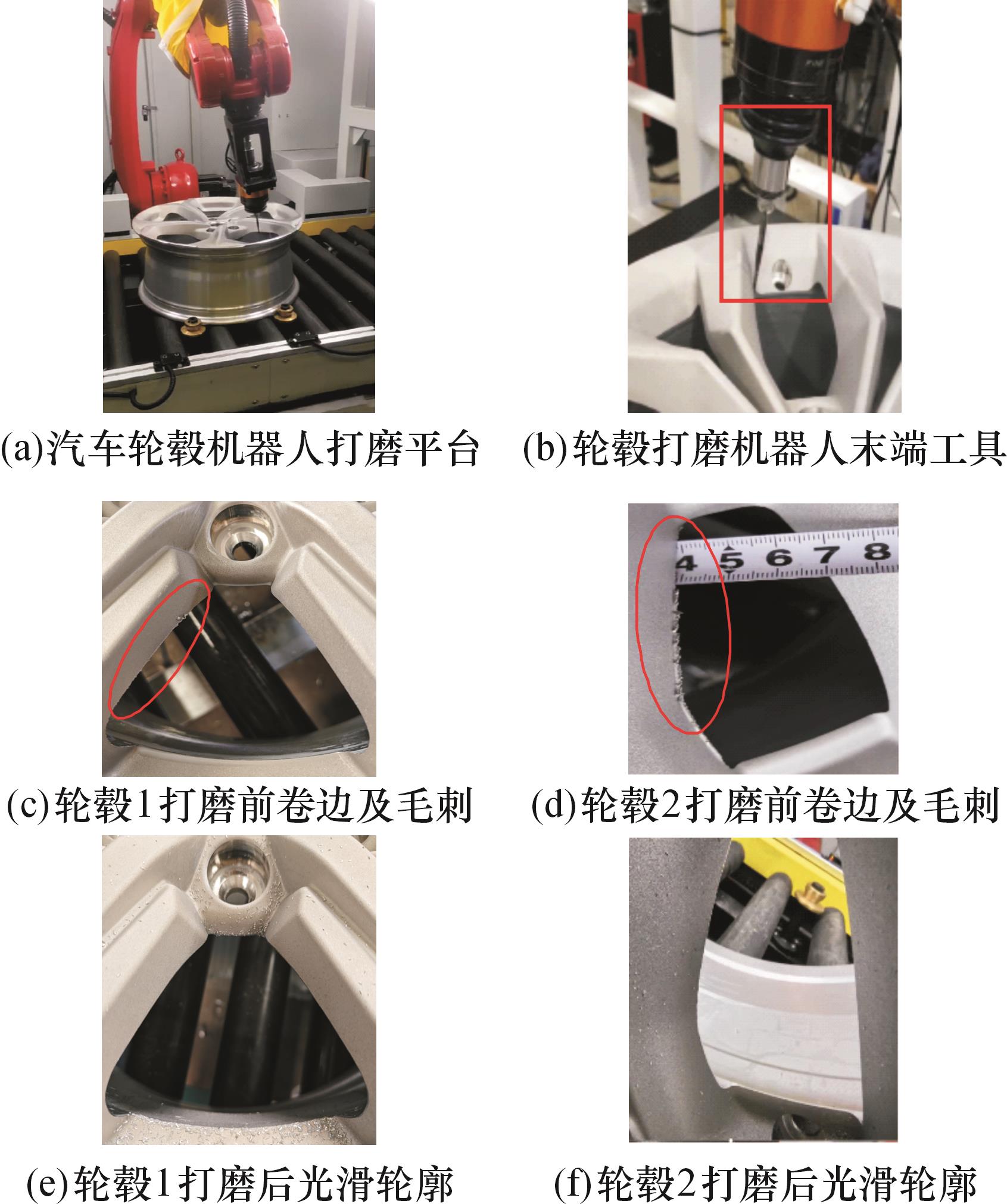
Fig. 7 Automobile wheel hub robotic grinding platform and comparison of experimental results before and after grinding of two type wheel hubs
| 参数 | 理论路径与测量路径误差D1/mm | 调整路径与测量路径误差D2/mm | 路径精度提升百分比/ % | |
|---|---|---|---|---|
| 轮毂1 | 最大误差 | 1.7632 | 0.2016 | 88.57 |
| 最小误差 | 0.1818 | 0.0049 | 97.30 | |
| 平均误差 | 0.7094 | 0.0589 | 91.70 | |
| 轮毂2 | 最大误差 | 2.4115 | 0.1990 | 91.75 |
| 最小误差 | 0.1657 | 0.0155 | 90.65 | |
| 平均误差 | 1.1668 | 0.0712 | 93.90 | |
Tab.1 Error analysis of wheel hub grinding paths before and after adjustment
| 参数 | 理论路径与测量路径误差D1/mm | 调整路径与测量路径误差D2/mm | 路径精度提升百分比/ % | |
|---|---|---|---|---|
| 轮毂1 | 最大误差 | 1.7632 | 0.2016 | 88.57 |
| 最小误差 | 0.1818 | 0.0049 | 97.30 | |
| 平均误差 | 0.7094 | 0.0589 | 91.70 | |
| 轮毂2 | 最大误差 | 2.4115 | 0.1990 | 91.75 |
| 最小误差 | 0.1657 | 0.0155 | 90.65 | |
| 平均误差 | 1.1668 | 0.0712 | 93.90 | |
| [1] | 雷雨, 许志龙, 徐西鹏, 等. 微切削结构毛刺研究综述[J]. 机械工程学报, 2024, 60(21): 336-348. |
| LEI Yu, XU Zhilong, XU Xipeng, et al. A Review of Burr Research of Microstructures in Micro Cutting[J]. Journal of Mechanical Engineering, 2024, 60(21): 336-348. | |
| [2] | 吴振国. 汽车的轻量化铝合金轮毂生产工艺研究[J].装备制造技术, 2024(6): 167-170. |
| WU Zhenguo. Research on Lightweight Aluminum Alloy Wheel Production Process for Automobiles[J]. Equipment Manufacturing Technology, 2024(6): 167-170. | |
| [3] | 卢晓红, 洛家庆, 丛晨, 等. 铝合金 LF21 微铣削顶端毛刺尺寸预测与工艺优化[J]. 吉林大学学报(工学版), 2025, 55(1): 125-131. |
| LU Xiaohong, LUO Jiaqing, CONG Chen, et al. Prediction of Top Burr Size and Optimization of Process Parameters in Micro-milling Aluminum Alloy LF21[J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 125-131. | |
| [4] | 李蕊, 李云革. 基于机器人视觉和力控技术的汽车轮毂打磨系统研究[J]. 汽车测试报告, 2023(21): 143-145. |
| LI Rui, LI Yunge. Research on Automotive Wheel Grinding System Based on Robot Vision and Force Control Technology[J]. Car Test Report, 2023(21): 143-145. | |
| [5] | 葛吉民, 邓朝晖, 李尉, 等. 机器人磨抛力柔顺控制研究进展[J]. 中国机械工程, 2021, 32(18): 2217-2230. |
| GE Jimin, DENG Chaohui, LI Wei, et al. Research Progresses of Robot Grinding and Polishing Force Compliance Controls[J]. China Mechanical Engineering, 2021, 32(18): 2217-2230. | |
| [6] | 汤彬康, 何震宇, 张永喆, 等. 汽车轮毂瑕疵智能检测系统的设计与开发[J]. 福建电脑, 2021, 37(7): 85-87. |
| TANG Binkang, HE Zhenyu, ZHANG Yongzhe, et al. Design and Development of Intelligent Detection System for Automobile Hub Defects[J]. Journal of Fujian Computer, 2021, 37(7): 85-87. | |
| [7] | 傅诤之. 机器人铣削去毛刺加工效率优化研究[J]. 现代制造技术与装备, 2023,59(8): 187-189. |
| FU Zhengzhi. Research on Optimization of Burr Removal Efficiency in Robot Milling[J]. Modern Manufacturing Technology and Equipment, 2023, 59(8): 187-189. | |
| [8] | 李想. 基于机器视觉的工件边缘加工轨迹生成与机器人运动规划研究[D].上海:上海交通大学, 2020. |
| LI Xiang. Research on Trajectory Generation and Robot Motion Planning for Workpiece Edge Machining Based on Machine Vision[D]. Shanghai:Shanghai Jiao Tong University, 2020. | |
| [9] | 陈杰, 王宏彦. 基于视觉的汽车轮毂打磨实训系统设计[J].工业仪表与自动化装置, 2021(1): 36-38. |
| CHEN Jie, WANG Hongyan. Design of Practical Training System of Wheel Hub Grinding Based on Vision[J]. Industrial Instrumentation and Automation, 2021(1): 36-38. | |
| [10] | ZHANG Yu, LIU Hongdi, CHENG Weikang, et al. A Novel Trajectory Planning Method for Robotic Deburring of Automotive Castings Considering Adaptive Weights[J]. Robotics and Computer-Integrated Manufacturing, 2024, 86:102677. |
| [11] | 程禛溢, 郭强, 鱼海东. 面向轮毂打磨的机器人冲击最优轨迹规划[J]. 农业装备与车辆工程, 2020, 58(7): 71-75. |
| CHENG Zhenyi, GUO Qiang, YU Haidong. Optimal Trajectory Planning of Impact for Hub Grinding Robot[J]. Agricultural Equipment & Vehicle Engineering, 2020, 58(7): 71-75. | |
| [12] | 徐汝锋, 陈志同, 孟凡军, 等. 基于机床运动学约束球头刀多轴加工刀轴矢量优化方法[J]. 机械工程学报, 2015, 51(23): 160-167. |
| XU Rufeng, CHEN Zhitong, MENG Fanjun, et al. Tool Orientation Optimization Method Based on Kinematics Constraints of the Machine Tool in Multi-axis Machining with a Ball-end Cutter[J]. Journal of Mechanical Engineering, 2015, 51(23): 160-167. | |
| [13] | XU R, LI X, ZHENG G, et al. A Radius Compensation Method of Barrel Tool Based on Macro Variables in Five-axis Flank Machining of Sculptured Surfaces[J]. International Journal of Production Research, 2020,58: 2335-2351. |
| [14] | 卢耀安, 丘洪键, 王成勇. 基于关键刀轴矢量插值的球头铣刀五轴加工光顺刀具姿态生成方法[J]. 中国机械工程, 2023, 34(20): 2466-2474. |
| LU Yaoan, QIU Hongjian, WANG Chengyong. Smooth Tool Orientation Generation Method of Five-axis Ball-end Milling via RTOs Interpolation[J]. China Mechanical Engineering, 2023, 34(20): 2466-2474. | |
| [15] | LU Y A, WANG C Y. Smoothing Method of Generating Flank Milling Tool Paths for Five-axis Flat-end Machining Considering Constraints[J]. International Journal of Advanced Manufacturing Techno-logy, 2020, 110(11/12): 3295-3309. |
| [16] | 赵恒, 周鑫, 张森堂. 基于机床旋转轴角加速度的五轴加工刀轴矢量局部优化[J]. 机床与液压, 2022, 50(11): 94-97. |
| ZHAO Heng, ZHOU Xin, ZHANG Sentang. Local Optimization of Five-axis Machining Tool Orientation Based on Angular Acceleration of Machine Tool[J]. Machine Tool & Hydraulics, 2022, 50(11): 94-97. | |
| [17] | 刘其广, 徐金亭, 徐飞飞, 等. 机床运动性能驱动的五轴加工刀具姿态光顺插值[J]. 机床与液压, 2024, 52(13): 22-26. |
| LIU Qiguang, XU Jinting, XU Feifei, et al. Smooth Interpolation of Tool Posture in Five-axis Machining Based on Kinematics Performance of Machine Tools[J]. Machine Tool & Hydraulics, 2024, 52(13): 22-26. | |
| [18] | 毛文志, 潘通, 李程鹏, 等. 基于球面线性插值的机器人磨削工具姿态规划[J]. 机床与液压, 2023, 51(3): 6-9. |
| MAO Wenzhi, PAN Tong, LI Chengpeng, et al. Tool Posture Planning for Robotic Grinding Based on Spherical Linear Interpolation[J]. Machine Tool & Hydraulics, 2023, 51(3): 6-9. | |
| [19] | ZHAO S, PENG F, SUN H, et al. Robotic Milling Posture Adjustment under Composite Constraints: a Weight-sequence Identification and Optimization Strategy[J].Robotics and Computer-Integrated Ma-nufacturing, 2024, 85: 102635. |
| [20] | 郭万金, 孙浩, 利乾辉, 等. 轮毂窗口毛刺机器人打磨刀路规划与工具姿态优化[J]. 中国机械工程, 2025, 36(6): 1222-1237. |
| GUO Wanjin, SUN Hao, LI Qianhui, et al. Tool Path Planning and Tool Orientation Optimization for Robotic Grinding of Wheel Hub Window Burrs[J]. China Mechanical Engineering, 2025, 36(6): 1222-1237. | |
| [21] | 张龙, 朱学军, 马心知, 等. 融合特征点提取的三维点云配准方法[J]. 应用激光, 2023, 43(12): 139-149. |
| ZHANG Long, ZHU Xuejun, MA Xinzhi, et al. Point Cloud Registration of Industrial Parts Based on Improved Nearest Iteration Points[J]. Applied Laser, 2023, 43(12): 139-149. | |
| [22] | 查云飞, 张坤, 沈磊, 等. 基于NSGA-Ⅱ的智能车辆换道轨迹规划与优化[J]. 汽车工程学报, 2024, 14(6): 970-980. |
| ZHA Yunfei, ZHANG Kun, SHEN Lei, et al. Lane-change Trajectory Planning and Optimization for Intelligent Vehicles Based on NSGA-Ⅱ[J]. Chinese Journal of Automotive Engineering, 2024, 14(6): 970-980. | |
| [23] | BI Q Z, WANG Y H, ZHU L M, et al. Wholly Smoothing Cutter Orientations for Five-axis NC Machining Based on Cutter Contact Point Mesh[J]. Science China Technological Sciences, 2010, 53(5): 1294-1303. |
| [24] | PLAKHOTNIK D, LAUWERS B. Graph-based Optimization of Five-axis Machine Tool Movements by Varying Tool Orientation[J]. The International Journal of Advanced Manufacturing Technology, 2014, 74(1): 307-318. |
| [25] | WANG Q, FENG Y, ZHANG Z, et al. Tool Orientation Sequence Smoothing Method Based on the Discrete Domain of Feasible Orientations[J]. The International Journal of Advanced Manufacturing Technology, 2017, 92(9): 4501-4510. |
| [26] | CASTAGNETTI C, DUC E, RAY P. The Domain of Admissible Orientation Concept: a New Method for Five-axis Tool Path Optimisation[J]. Computer-Aided Design, 2008, 40(9): 938-950. |
| [1] |
ZHAN Xiao-Lei, XIN Hong-Bing, HAN Shi-·Bi-De- Lan-Te-Shi.
Kinematics Simulation of MOTOMAN-HP3 Robot Based on Virtual Reality
[J]. J4, 201016, 21(16): 1952-1954,1998.
|
| [2] | CHEN Ruiguo, AIYITI Wurikaixi. A Dual-tracking Strategy for Interlayer Deviation Optimization in Mobile Robotic 3D Printing [J]. China Mechanical Engineering, 2026, 37(6): 1410-1417. |
| [3] | XU Hanxin, LIU Li, CHEN Xing, WANG Jing. Augmented Reality-enabled Motion Monitoring and Interaction System for Mobile Robots [J]. China Mechanical Engineering, 2026, 37(6): 1442-1450. |
| [4] | JIANG Lijie, YANG Hang, HAN Dong, SUN Yanming, WANG Yixin, WU Qiankun, JIA Lianhui. Design and Applications of Disc Cutter Changing Robots for Shield Machines [J]. China Mechanical Engineering, 2026, 37(5): 1037-1044. |
| [5] | MU Junqi, WEI Yiyang, HOU Xuping, ZONG Xiaofeng. Design and Multi-gait Implementation of Layered Actuators Based on Fiber-Pneumatic Coupled Variable-stiffness Snake Robots [J]. China Mechanical Engineering, 2026, 37(5): 1095-1104. |
| [6] | DONG Jiaxiang, ZHAO Xuezhi, HU Xiping, LIU Quanquan. Mechanism Design and Experimental Validation of a Novel Rigid-Flexible Hybrid Continuum Robot with a Tension-Torsion Synergistic Actuation [J]. China Mechanical Engineering, 2026, 37(5): 1193-1198. |
| [7] | CAO Yiran, GAO Lei, WU Mengli, WANG Xuhao, PENG Cong, GUO Zhiyong, LIANG Yao. Prescribed Performance Visual Servo Control Strategy for Mobile Robots Integrating Preview Mechanism [J]. China Mechanical Engineering, 2026, 37(5): 1218-1225. |
| [8] | XIAO Wei, ZHANG Cong, CHEN Xubing. Energy Consumption Prediction of Industrial Robots Based on Bayesian Optimized Temporal Convolutional Network [J]. China Mechanical Engineering, 2026, 37(4): 831-836. |
| [9] | SUN Yue, HUANG Hui, YIN Fangchen. Energy Consumption Prediction of Industrial Robots under High-load Dynamic Conditions [J]. China Mechanical Engineering, 2026, 37(4): 939-947. |
| [10] | GUO Wanjin, LI Qianhui, TIAN Yuxiang, CAO Chuqing, ZHAO Lijun, XU Mingkun, LIU Xiaoheng, HOU Xudong. Chatter Avoidance Method of Industrial Robotic Machining Based on Dynamics Mode Decoupling [J]. China Mechanical Engineering, 2026, 37(3): 571-585. |
| [11] | YI Yali, CHENG Yangyang, CHEN Xiaowei, YANG Wenbo, JIN Herong. Research on Chatter Recognition and Suppression Methods for Robotic Milling of Thin-walled Cylinders [J]. China Mechanical Engineering, 2026, 37(3): 634-644. |
| [12] | GUO Wanjin, TIAN Yuxiang, LI Qianhui, CAO Chuqing, ZHAO Lijun, XU Mingkun, LIU Xiaoheng, HOU Xudong. Adaptive Variable Impedance Constant Force Control of Robotic Grinding under Unknown Environments [J]. China Mechanical Engineering, 2026, 37(1): 92-104. |
| [13] | YANG Mingxing, SHEN Jiale, GAO Peng, ZHANG Xing, WANG Junxiang. Design of Continuum Robots and Compensation Strategies for Losses of Guide Paths [J]. China Mechanical Engineering, 2025, 36(12): 2820-2828. |
| [14] | YIN Feng, HUANG Xin, ZHOU Jiayi. High-precision Computation of Inverse Kinematics for Redundant Robots Based on Flow Model [J]. China Mechanical Engineering, 2025, 36(12): 2960-2967. |
| [15] | TUO Jiying, XU Xiaonan, LI Jun, ZHANG Yuchen, HUANG An, HU Du, LIU Zilin. A Six-axis Robotic Arm Path Planning Based on Improved SAC Algorithm [J]. China Mechanical Engineering, 2025, 36(12): 2986-2992. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||