

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (5): 1218-1225.DOI: 10.3969/j.issn.1004-132X.2026.05.022
Previous Articles Next Articles
CAO Yiran1( ), GAO Lei1, WU Mengli1(), WANG Xuhao1, PENG Cong1, GUO Zhiyong1, LIANG Yao2
), GAO Lei1, WU Mengli1(), WANG Xuhao1, PENG Cong1, GUO Zhiyong1, LIANG Yao2
Received:2025-05-28
Online:2026-05-25
Published:2026-06-09
Contact:
WU Mengli
曹轶然1(), 高磊1, 吴孟丽1(), 王旭浩1, 彭聪1, 郭志永1, 梁瑶2
通讯作者:
吴孟丽
作者简介:曹轶然,女,1988年生,博士、讲师。研究方向为机器人运动控制和多智能体协同。E-mail:yrcao@cauc.edu.cn基金资助:CLC Number:
CAO Yiran, GAO Lei, WU Mengli, WANG Xuhao, PENG Cong, GUO Zhiyong, LIANG Yao. Prescribed Performance Visual Servo Control Strategy for Mobile Robots Integrating Preview Mechanism[J]. China Mechanical Engineering, 2026, 37(5): 1218-1225.
曹轶然, 高磊, 吴孟丽, 王旭浩, 彭聪, 郭志永, 梁瑶. 融合预瞄机制的移动机器人预设性能视觉伺服控制策略[J]. 中国机械工程, 2026, 37(5): 1218-1225.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.05.022
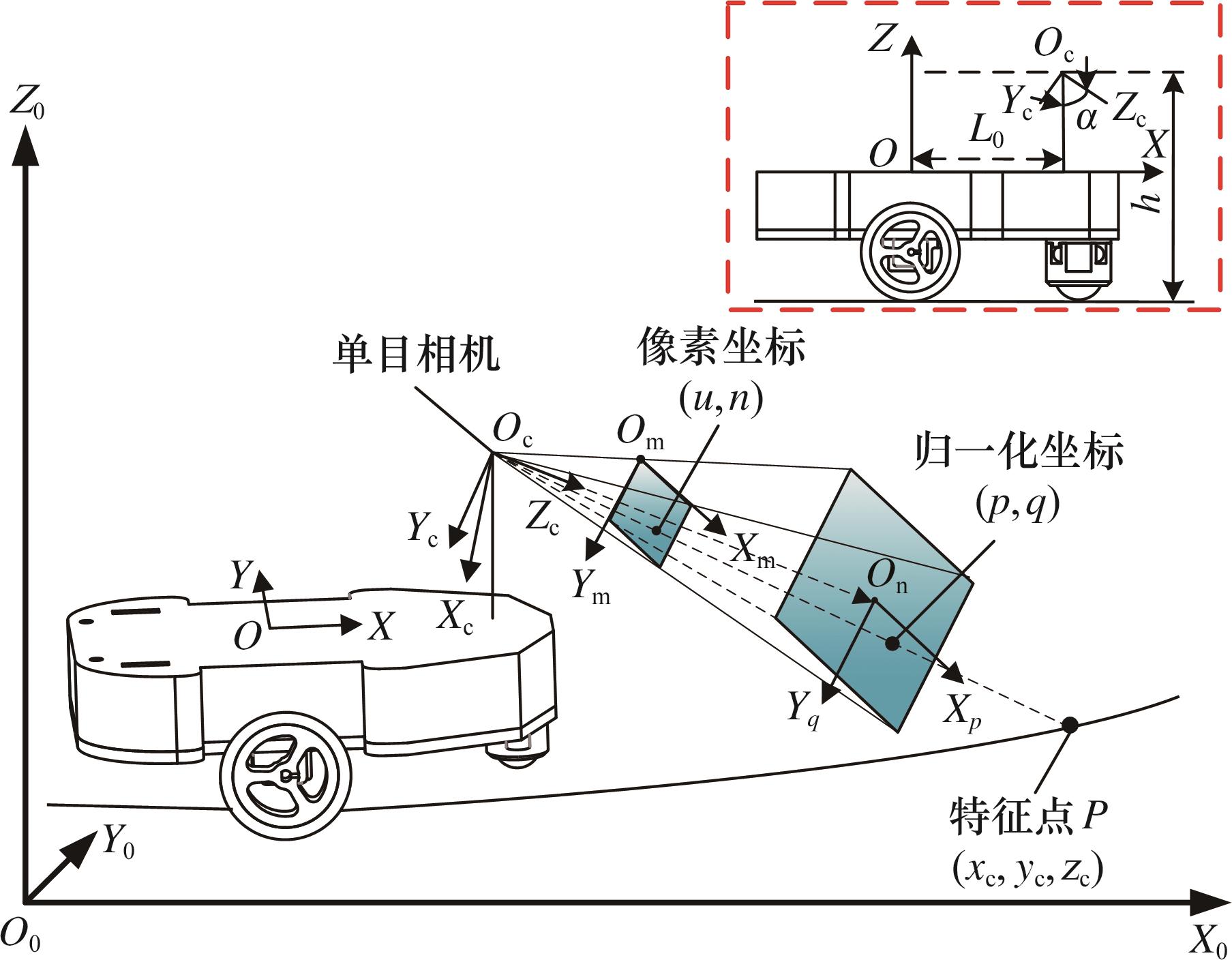
Fig.1 Visual servo control system
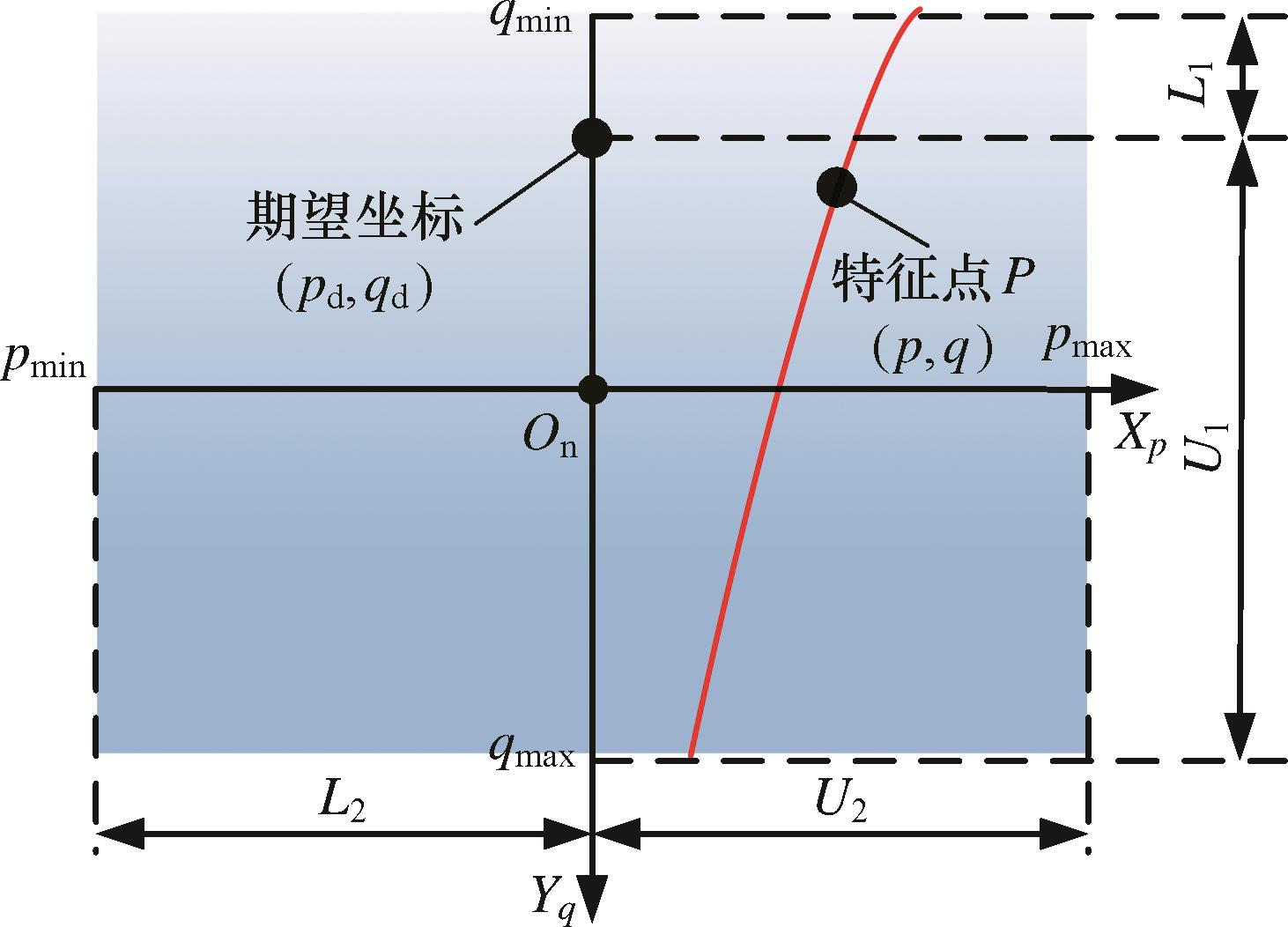
Fig.2 Normalized plane schematic diagram
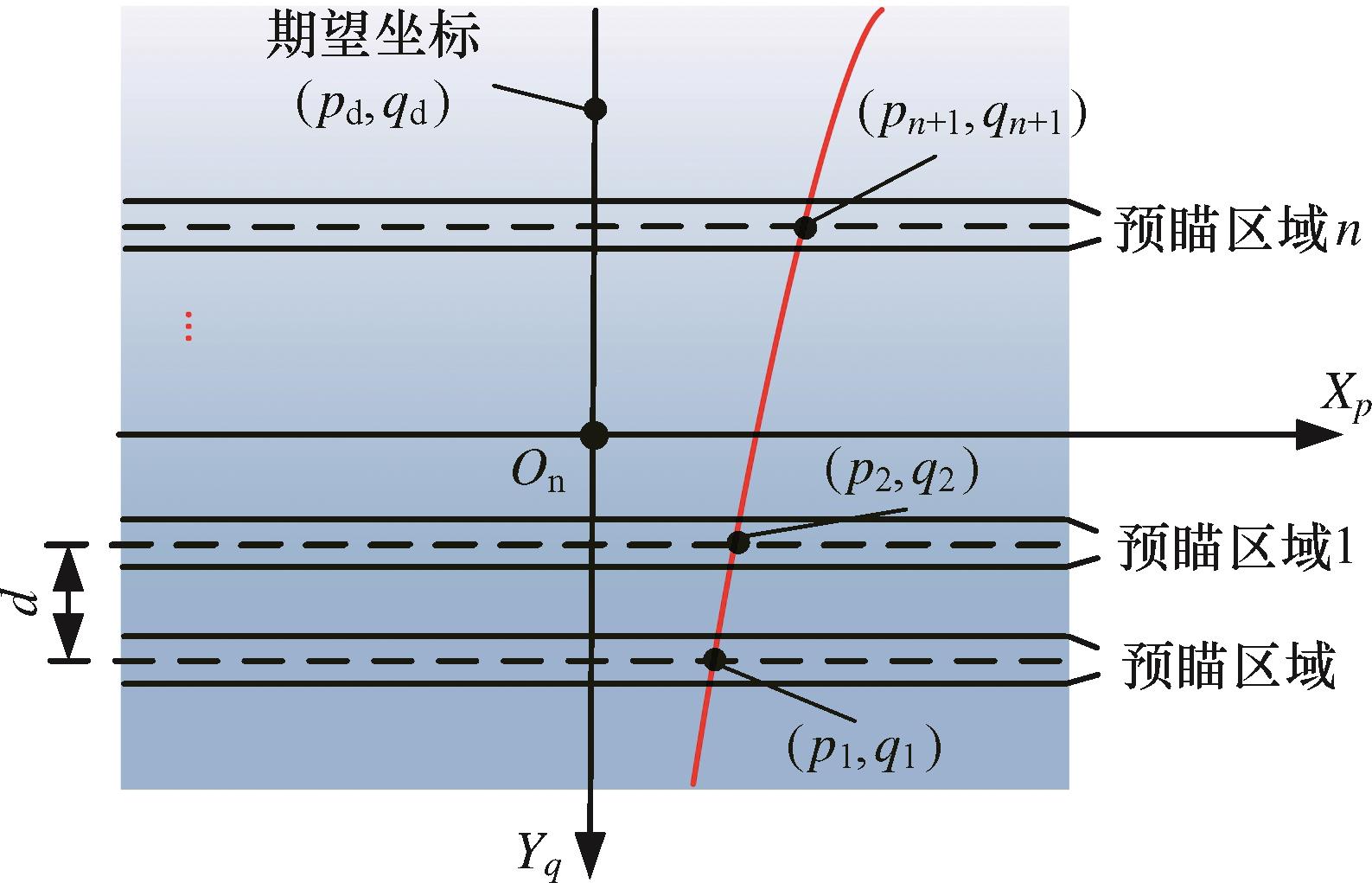
Fig.3 Schematic diagram of normalized planar feature point extraction
| 参数 | 数值 |
|---|---|
| (pd,qd) | (0, |
| (p,q) | (0.2, |
| h/m | |
| K1 | diag(0.05,0.05) |
| K2 | diag(0.01,0.008) |
| 轨迹起始坐标/m | (0,5) |
| ( | (0.02,0.02) |
| 1 | |
| 移动机器人起始坐标/m | (-2.5,5.5) |
| (β1,β2) | (0.7,0.3) |
Tab.1 Simulation parameter design
| 参数 | 数值 |
|---|---|
| (pd,qd) | (0, |
| (p,q) | (0.2, |
| h/m | |
| K1 | diag(0.05,0.05) |
| K2 | diag(0.01,0.008) |
| 轨迹起始坐标/m | (0,5) |
| ( | (0.02,0.02) |
| 1 | |
| 移动机器人起始坐标/m | (-2.5,5.5) |
| (β1,β2) | (0.7,0.3) |
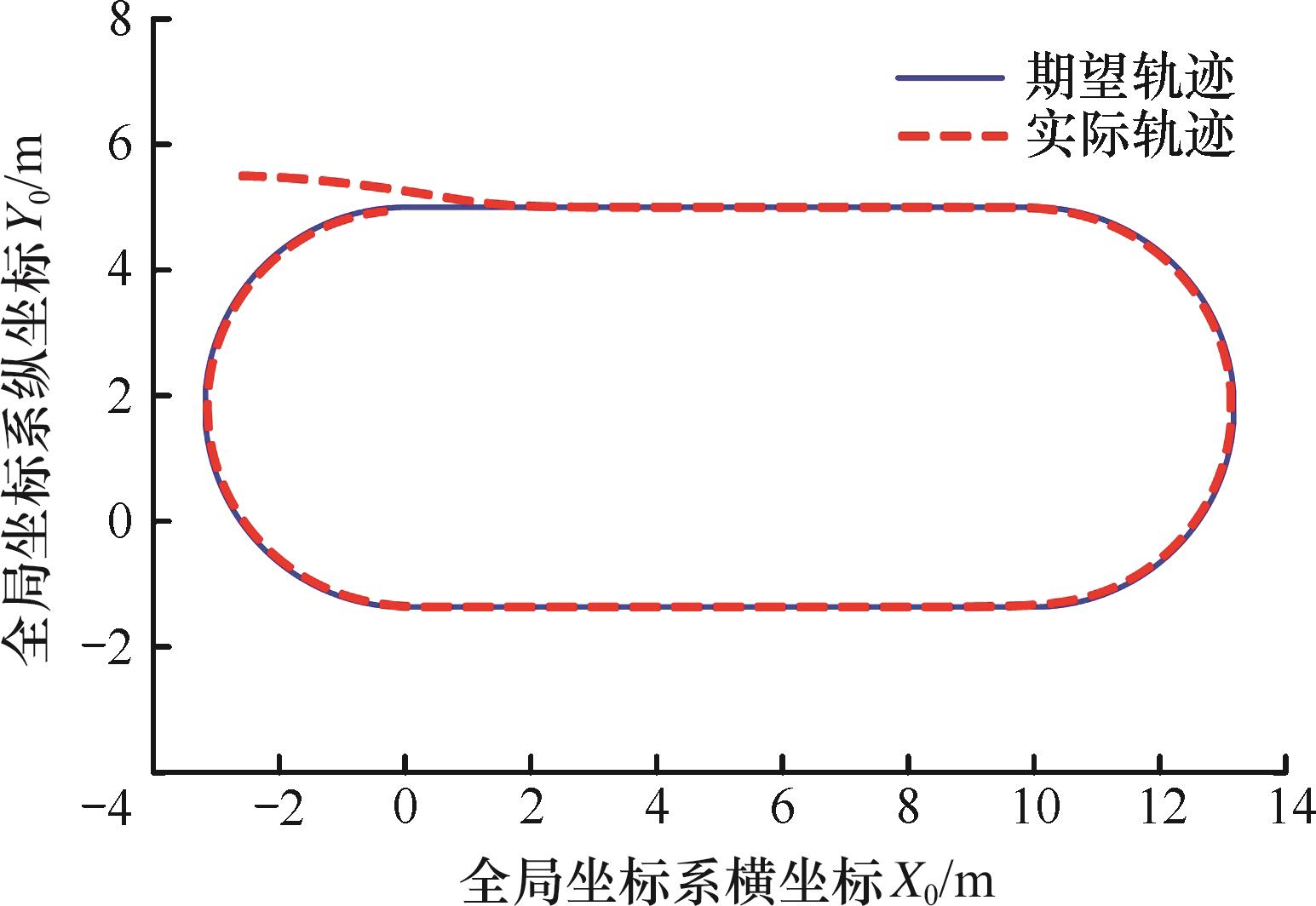
Fig.4 Simulation movement trajectory of the mobile robot
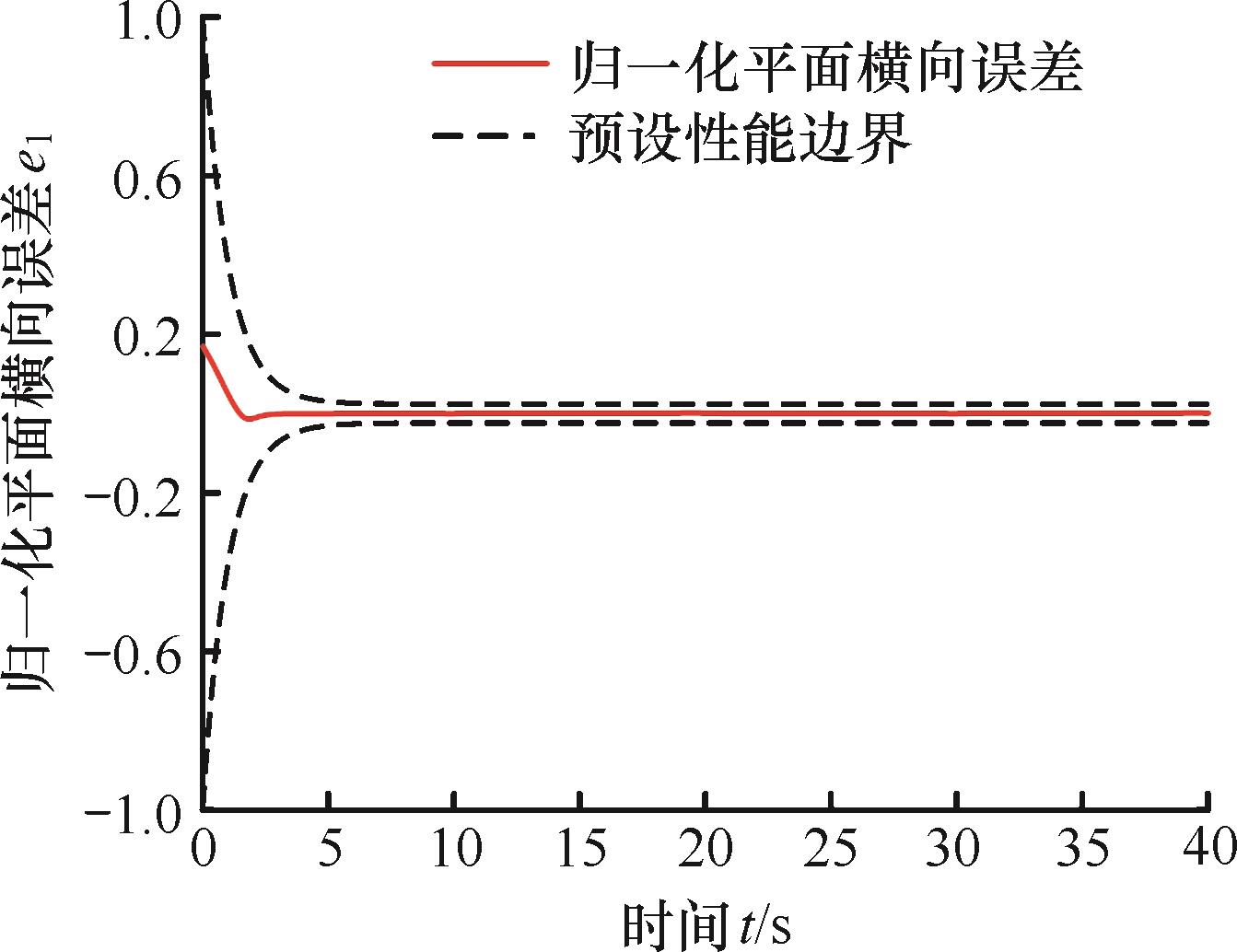
Fig.5 Simulation results of lateral error under the normalized plane
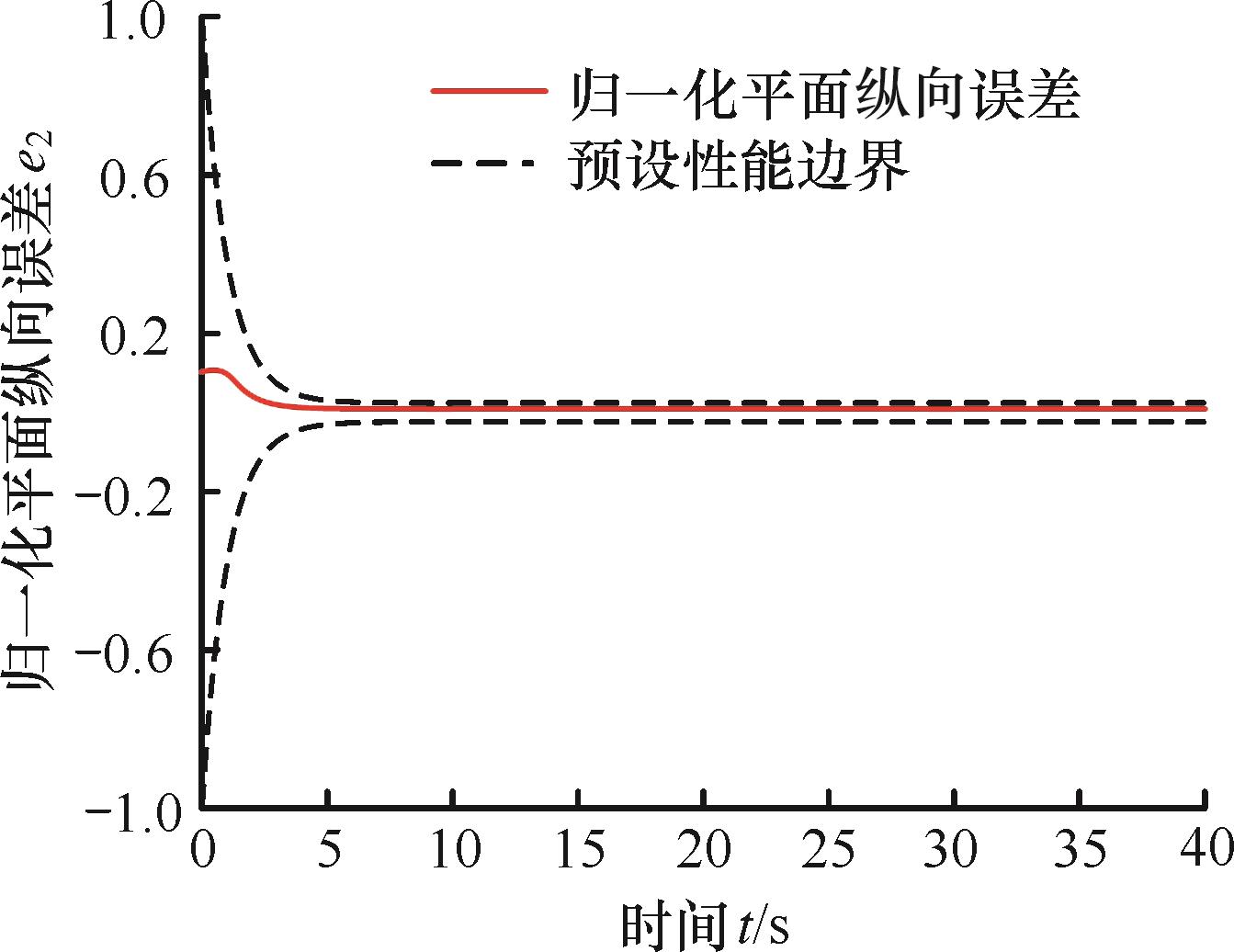
Fig.6 Simulation results of longitudinal error under the normalized plane
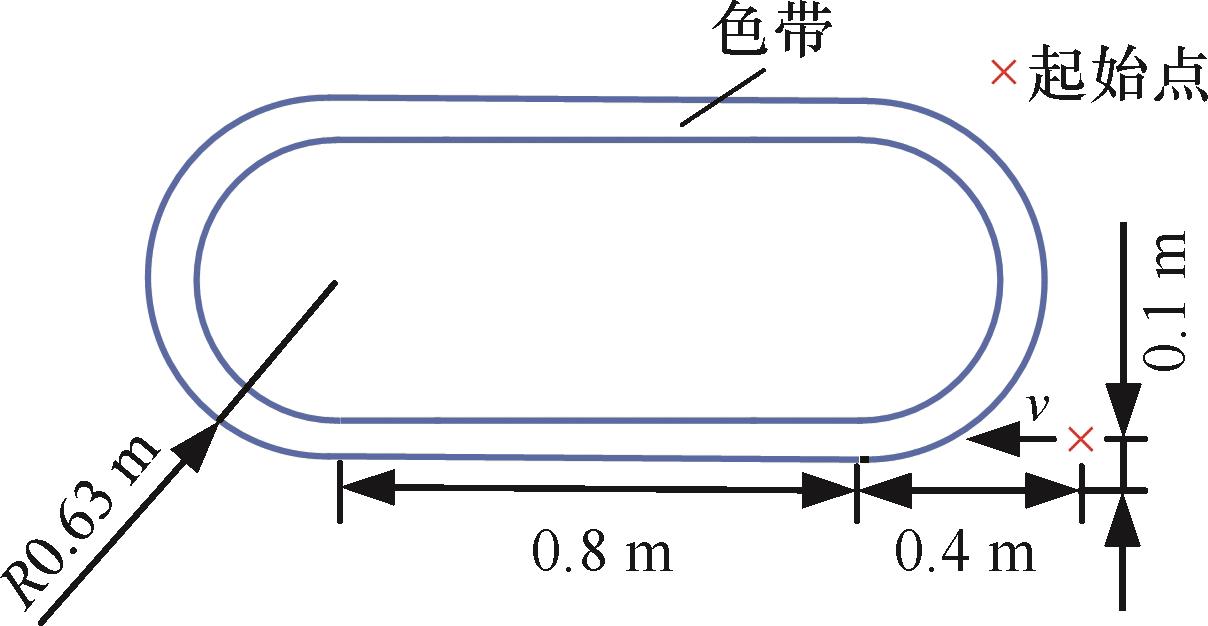
Fig.7 Experimental trajectory layout diagram
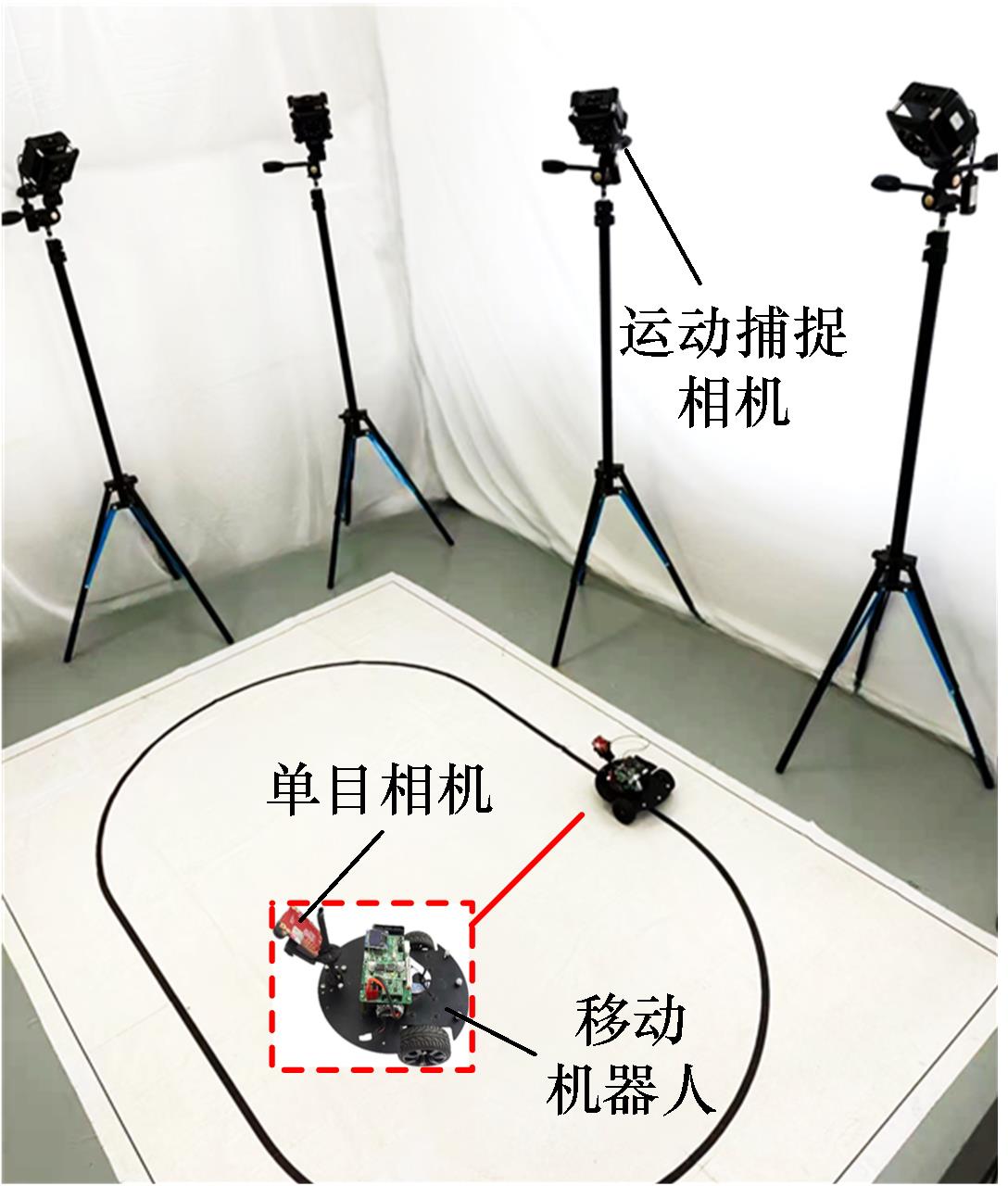
Fig.8 Experimental scene layout diagram
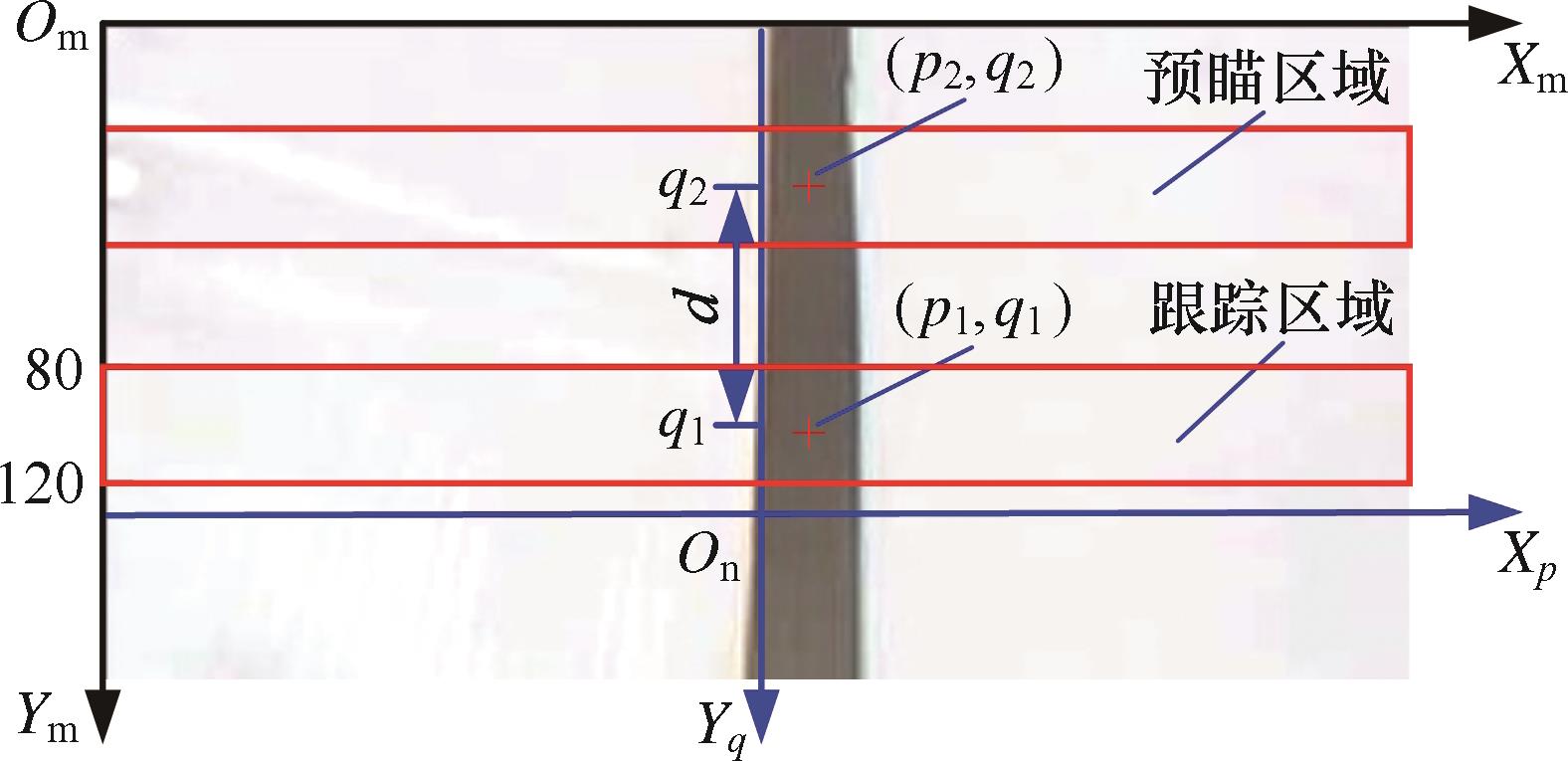
Fig.9 Schematic diagram of feature point extractionfor visual image preview tracking
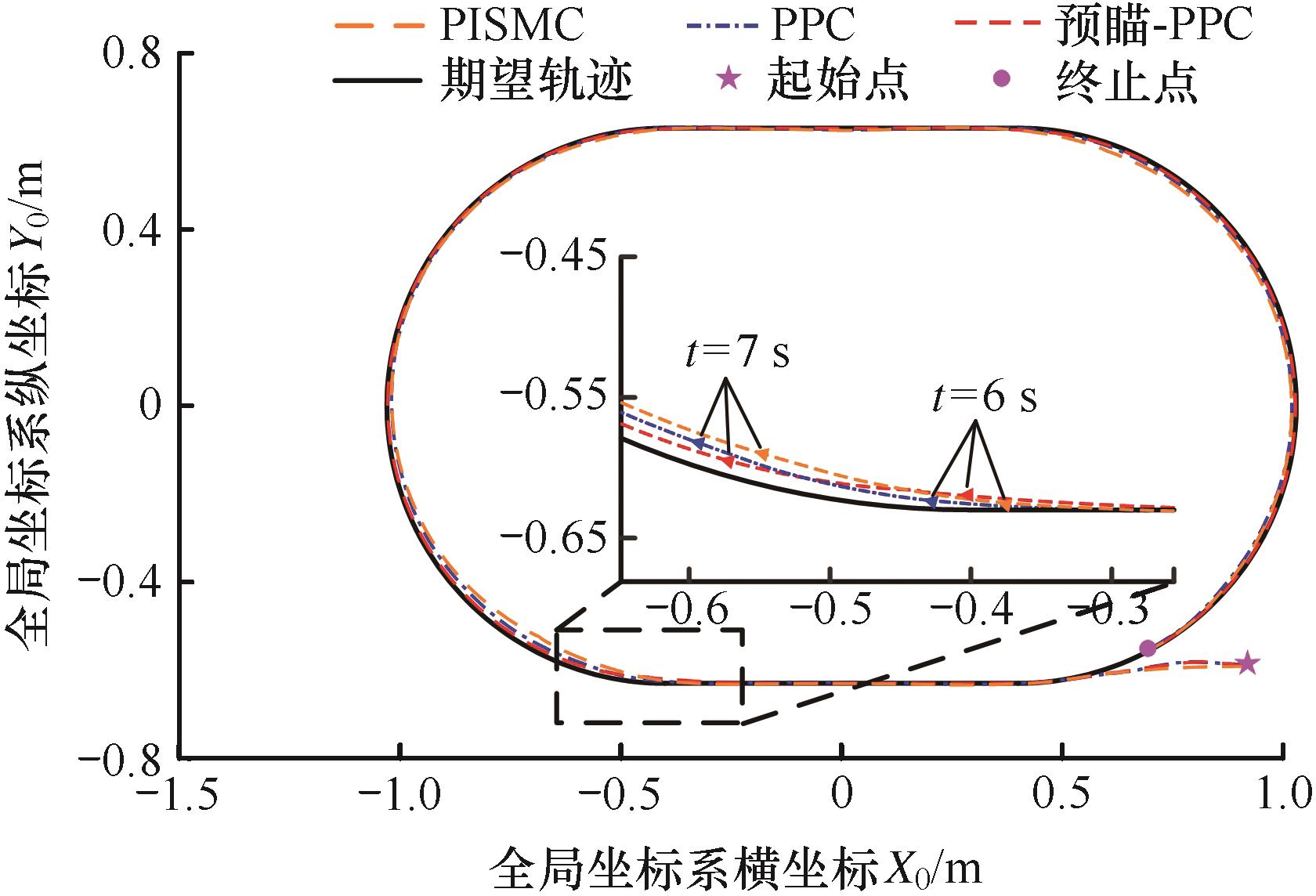
Fig.10 Experimental movement trajectory of the mobile robot
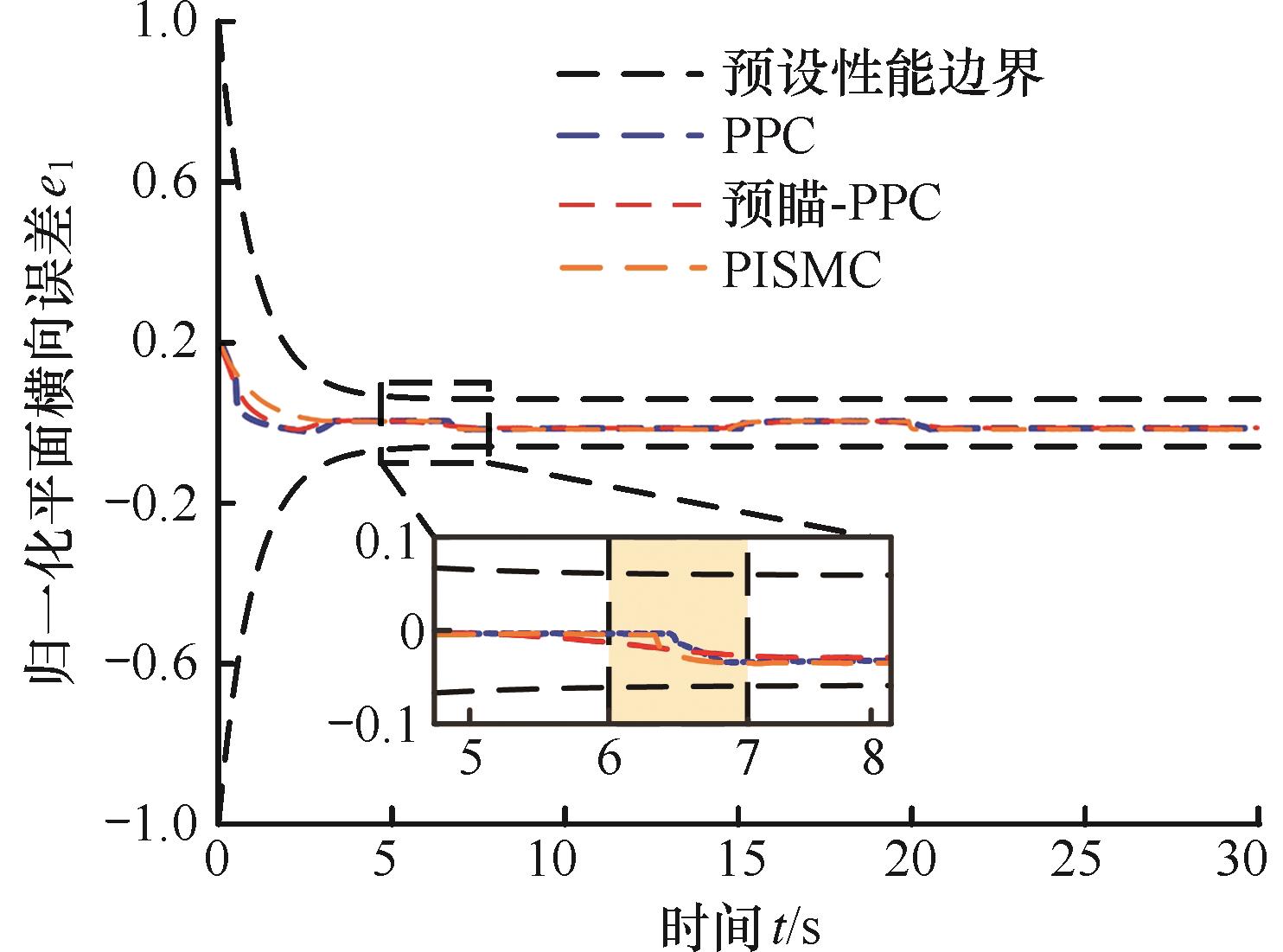
Fig.11 Experimental results of lateral error under the normalized plane
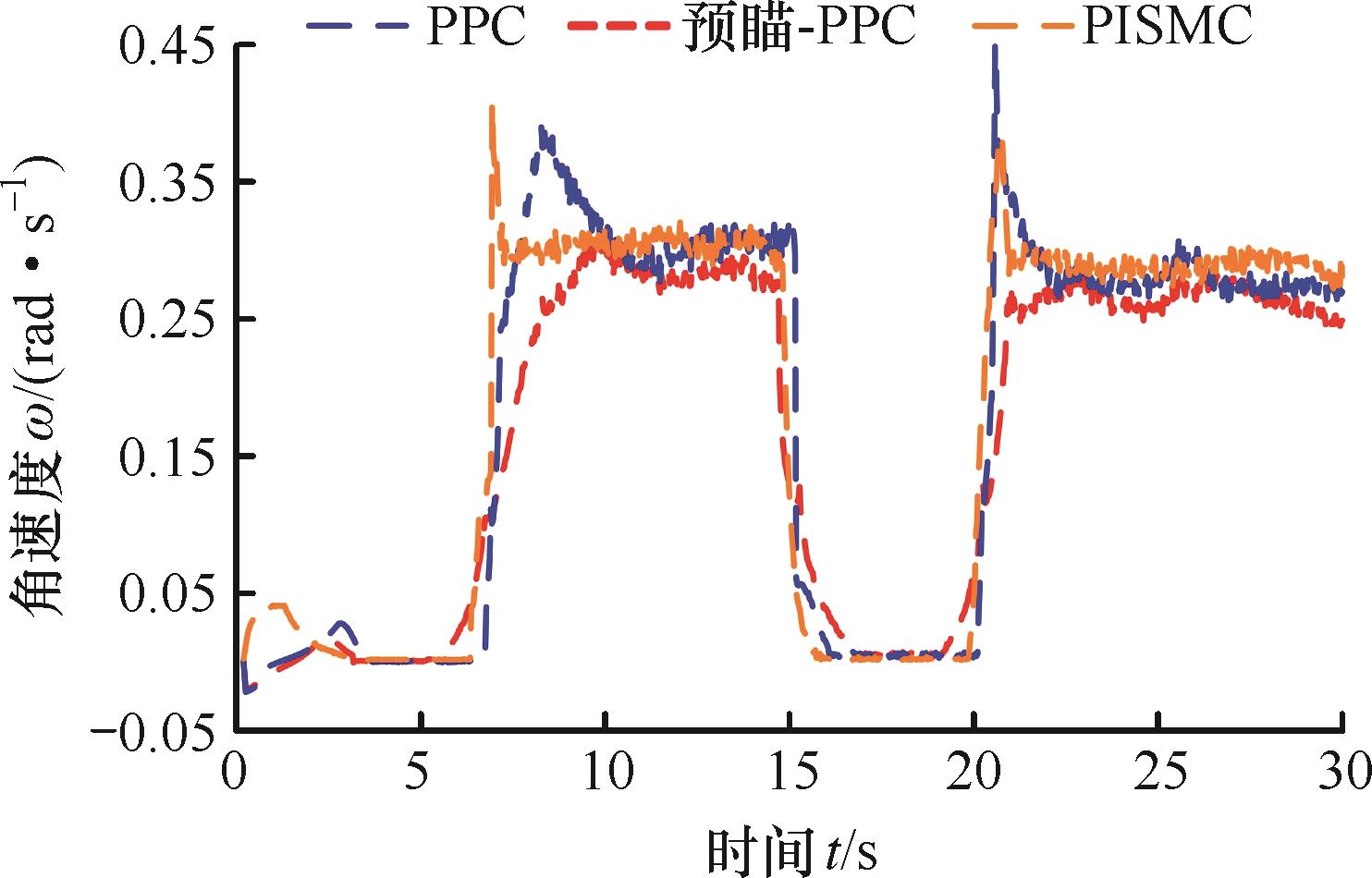
Fig.12 Angular velocity of mobile robots
| [1] | 张哲源, 胡晓兵, 李虎, 等. 面向智能上下料系统的全局视觉AGV路径导航系统[J]. 组合机床与自动化加工技术, 2024(12): 91-95. |
| ZHANG Zheyuan, HU Xiaobing, LI Hu, et al. Global Vision AGV Path Navigation System for Intelligent Loading and Unloading Systems[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2024(12): 91-95. | |
| [2] | 王哲, 丰飞, 郭峰. 大尺度复杂构件群体机器人协同并行制造系统集成的关键技术[J]. 航空制造技术, 2025, 68(4): 53-66. |
| WANG Zhe, FENG Fei, GUO Feng. Key Technologies of Swarm Robotic Cooperative Parallel Manufacturing System Integration for Large Scale Complex Components[J]. Aeronautical Manufacturing Technology, 2025, 68(4): 3-66. | |
| [3] | 郑联语, 付强, 樊伟, 等. 基于双目视觉和先验加工数据的大型筒件原位位姿感知方法[J]. 机械工程学报, 2023, 59(11): 129-146. |
| ZHENG Lianyu, FU Qiang, FAN Wei, et al. In-situ Pose Measurement Method for Large Cylinders Based on Binocular Vision and Prior Processing Data[J]. Journal of Mechanical Engineering, 2023, 59(11): 129-146. | |
| [4] | 茅健, 廖茂成, 周海军, 等. 机器视觉技术在航空装配中的应用现状与展望[J]. 航空制造技术, 2025, 68(5): 26-46. |
| MAO Jian, LIAO Maocheng, ZHOU Haijun, et al. Machine Vision Technology in Aerospace Assembly: Current Status and Prospects[J]. Aeronautical Manufacturing Technology, 2025, 68(5): 26-46. | |
| [5] | 黄梦洁, 叶磊, 易凡骁, 等. 面向机器人控制的直接视觉伺服技术发展综述[J]. 控制理论与应用, 2025, 42(9): 1681-1699. |
| HUANG Mengjie, YE Lei, YI Fanxiao, et al. A Review of the Development of Direct Vision Servo Technology for Robot Control[J]. Control Theory & Applications, 2025, 42(9): 1681-1699. | |
| [6] | WANG T, ZHANG Y, LIU B. Model-based Visual Servoing for Automatic Docking System of Circular Symmetrical Target with Large Displacement[J]. International Journal of Control, Automation and Systems, 2023, 21( 4 ): 1273-1284. |
| [7] | JO K, CHWA D. Robust Hybrid Visual Servoing of Omnidirectional Mobile Manipulator with Kinematic Uncertainties Using a Single Camera[J]. IEEE Transactions on Cybernetics, 2024, 54(5): 2824-2837. |
| [8] | 仲训杲, 罗家国, 田军, 等. 二阶锥约束规划的机器人视觉闭环位姿自协调方法[J]. 中国机械工程, 2024, 35(6): 1064-1073. |
| ZHONG Xungao, LUO Jiaguo, TIAN Jun, et al. Robot Vision Closed-loop Pose Autonomous Coordination Method with Second-order Cone Constrained Programming[J]. China Mechanical Engineering, 2024, 35(6): 1064-1073. | |
| [9] | ZHU T, MAO J, HAN L, et al. Fuzzy Adaptive Model Predictive Control for Image-based Visual Servoing of Robot Manipulators with Kinematic Constraints[J]. International Journal of Control, Automation and Systems, 2024, 22(1): 311-322. |
| [10] | HE S, XU Y, GUAN Y, et al. Synthetic Robust Model Predictive Control with Input Mapping for Constrained Visual Servoing[J]. IEEE Transactions on Industrial Electronics, 2023, 70(9): 9270-9280. |
| [11] | WANG D, LIN J, MA L, et al. Image-based Visual-admittance Control with Prescribed Performance of Manipulators in Feature Space[J]. IEEE Transactions on Industrial Electronics, 2025, 72(5): 5060-5070. |
| [12] | DAI S, LIANG J, LU K, et al. Adaptive Image-based Moving-target Tracking Control of Wheeled Mobile Robots with Visibility Maintenance and Obstacle Avoidance[J]. IEEE Transactions on Control Systems Technology, 2024, 32(2): 488-501. |
| [13] | CHEN Y, LAN L, LIU X, et al. Adaptive Stiffness Visual Servoing for Unmanned Aerial Manipulators with Prescribed Performance[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 11028-11038. |
| [14] | 刘铭, 冷搏, 闻焕汐, 等. 基于优化预瞄距离的无人驾驶车辆轨迹跟踪控制[J]. 同济大学学报(自然科学版), 2024, 52(): 165-175. |
| LIU Ming, LENG Bo, WEN Huanxi, et al. Trajectory Tracking Control of Autonomous Vehicle Based on Optimized Preview Distance[J]. Journal of Tongji University (Natural Science), 2024, 52(S1): 165-175. | |
| [15] | 张俊娜, 白国星. 基于速度调节与路径跟踪的差动机器人运动控制[J]. 工程科学学报, 2023, 45(9): 1550-1558. |
| ZHANG Junna, BAI Guoxing. Motion Control of Differential Robot Based on Speed Adjusting and Path Tracking[J]. Chinese Journal of Engineering, 2023, 45(9): 1550-1558. | |
| [16] | LI Q, CHEN Z, SONG H, et al. Model Predictive Control for Speed-dependent Active Suspension System with Road Preview Information[J]. Sensors, 2024, 24(7): 2255. |
| [17] | WANG Q, CHEN Q, LIU C, et al. A Model Predictive Control Algorithm for Path Tracking Based on Multi-point Preview Dynamics and Safety Guaranteed Constraint[J]. IEEE Transactions on Vehicular Technology, 2025, 74(1): 441-453. |
| [18] | 袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制[J]. 自动化学报, 2025, 51(5): 1052-1066. |
| YUAN Yang, DUAN Haibin, WEI Chen. Heterogeneous Cooperative Fixed-time Prescribed Performance Evolution Control for Unmanned Aerial/Surface Vehicle[J]. Acta Automatica Sinica, 2025, 51(5): 1052-1066. | |
| [19] | 李小华, 刘莹, 邹嵩楠. 基于可变障碍函数和强化学习的预设性能最优安全跟踪控制[J]. 控制与决策, 2025, 40(3): 803-812. |
| LI Xiaohua, LIU Ying, ZOU Songnan. Optimal Safety Tracking Control with Prescribed Performance Based on Variable Barrier Function and Reinforcement Learning[J]. Control and Decision, 2025, 40(3): 803-812. | |
| [20] | KESHAVAN J, BELGAONKAR S, MURALI S. Adaptive Control of a Constrained First Order Sliding Mode for Visual Formation Convergence Applications[J]. IEEE Access, 2023, 11: 112263-112275. |
| [1] | Zhiwei ZHOU, Jian GAO, Lanyu ZHANG. A Model-free Cross-coupling Control Method for Parallel Kinematic Mechanisms with Symmetric Structure [J]. China Mechanical Engineering, 2025, 36(08): 1691-1699. |
| [2] | HE Yang, LI Gang, YU Xiaonan. Research on Fuzzy Model Predictive Control Method for High Speed Intelligent Vehicles Based on Variable Universe [J]. China Mechanical Engineering, 2025, 36(03): 604-613. |
| [3] | SUN Feng1, ZHU Anjie1, ZHANG Ming1, PEI Wenzhe1, JIN Junjie1, ZHANG Weiwei2, TANG Junyue2, JIANG Shengyuan2. Design and Tests of Lunar Spring-recovery Rope-driven Sampling Robot Arm [J]. China Mechanical Engineering, 2024, 35(11): 1977-1985. |
| [4] | LIU Songyong1, WU Hongzhuang2, CHENG Cheng2, SONG Mingjiang1, 3, CUI Yuming4. Self-positioning Cutting Control Methods and Experimental Research for Coal Mine Roadheaders [J]. China Mechanical Engineering, 2024, 35(07): 1318-1329. |
| [5] | ZHONG Xungao1, 4, LUO Jiaguo1, TIAN Jun2, ZHONG Xunyu2, PENG Xiafu2, LIU Qiang3. Robot Vision Closed-loop Pose Autonomous Coordination Method with Second-order Cone Constrained Programming [J]. China Mechanical Engineering, 2024, 35(06): 1064-1073. |
| [6] | LIU Junling, FENG Ganghui, ZHANG Junjiang, YANG Kai. Fusion Research of Trajectory Tracking Energy-saving Control of Unmanned Hybrid Vehicles [J]. China Mechanical Engineering, 2024, 35(04): 678-690. |
| [7] | MEI Jie, QIN Jiarui, CHEN Dingfang, CHEN Kun, . SLAM-based Underwater Image Enhanced Visual 3D Reconstruction Method [J]. China Mechanical Engineering, 2024, 35(02): 268-279. |
| [8] | XU Wan, CHENG Zhao, XIA Ruidong, CHEN Hancheng. An Adaptive Robust Unscented Kalman Filter Localization Algorithm Based on Dynamic Residual [J]. China Mechanical Engineering, 2023, 34(21): 2607-2614. |
| [9] | WU Xing, YANG Junjie, TANG Kai, ZHAI Jingjing, LOU Peihuang. Hierarchical Path Planning for Mobile Robots Based on Hybrid Map [J]. China Mechanical Engineering, 2023, 34(05): 563-575. |
| [10] | LI Ronghua, YANG Jingshan, ZHENG Yufeng, ZHOU Wei. Design of Multi-link Independent Suspension Systems with Constant Wheel Track [J]. China Mechanical Engineering, 2023, 34(02): 148-156. |
| [11] | TIAN Mingrui, , YANG Hao, HU Yongbiao. Large-field and High-precision Dynamic Positioning Method of Indoor Mobile Robots [J]. China Mechanical Engineering, 2022, 33(02): 194-201. |
| [12] | LIU Mingyuan, CHEN Ping, MA Jianshe. Structural Optimization Design and Research of Direct-drive Quadruped Robots [J]. China Mechanical Engineering, 2021, 32(18): 2246-2253. |
| [13] | XIE Dongfu1;LUO Yufeng1,2;SHI Zhixin1;LIU Yande2. Research on Cooperative Modes and Tipping Stability of Multiple Mobile Robots [J]. China Mechanical Engineering, 2020, 31(20): 2472-2485. |
| [14] | LI Yang1,2,3;LIU Ziming1,2,4;CHEN Qingying1,2,3. Decoupling Active Caster Omnidirectional Mobile Robot Tracking Control Considering Slip Interferences [J]. China Mechanical Engineering, 2020, 31(18): 2247-2253. |
| [15] | QIN Yanming;ZHAO Jingyi;MA Jinyu;WANG Jianjun. Trajectory Tracking Control of Eight-DOF Manipulators [J]. China Mechanical Engineering, 2019, 30(22): 2741-2747,2756. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||