

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (5): 1210-1217.DOI: 10.3969/j.issn.1004-132X.2026.05.021
YANG Yongjun( ), YANG Renyou(), LI Yufeng, QIN Hao
), YANG Renyou(), LI Yufeng, QIN Hao
Received:2025-07-10
Online:2026-05-25
Published:2026-06-09
Contact:
YANG Renyou
杨永俊(), 杨仁友(), 李俞锋, 秦浩
通讯作者:
杨仁友
作者简介:杨永俊,男,1998年生,科研助理。研究方向为水下机器人、三维重建、视觉SLAM。E-mail:1515813841@qq.com基金资助:CLC Number:
YANG Yongjun, YANG Renyou, LI Yufeng, QIN Hao. Underwater Target 3D Reconstruction Method Based on AUV Equipped with Monocular-Line Laser[J]. China Mechanical Engineering, 2026, 37(5): 1210-1217.
杨永俊, 杨仁友, 李俞锋, 秦浩. 基于自主水下航行器搭载单目-线激光器的水下目标三维重建方法[J]. 中国机械工程, 2026, 37(5): 1210-1217.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.05.021
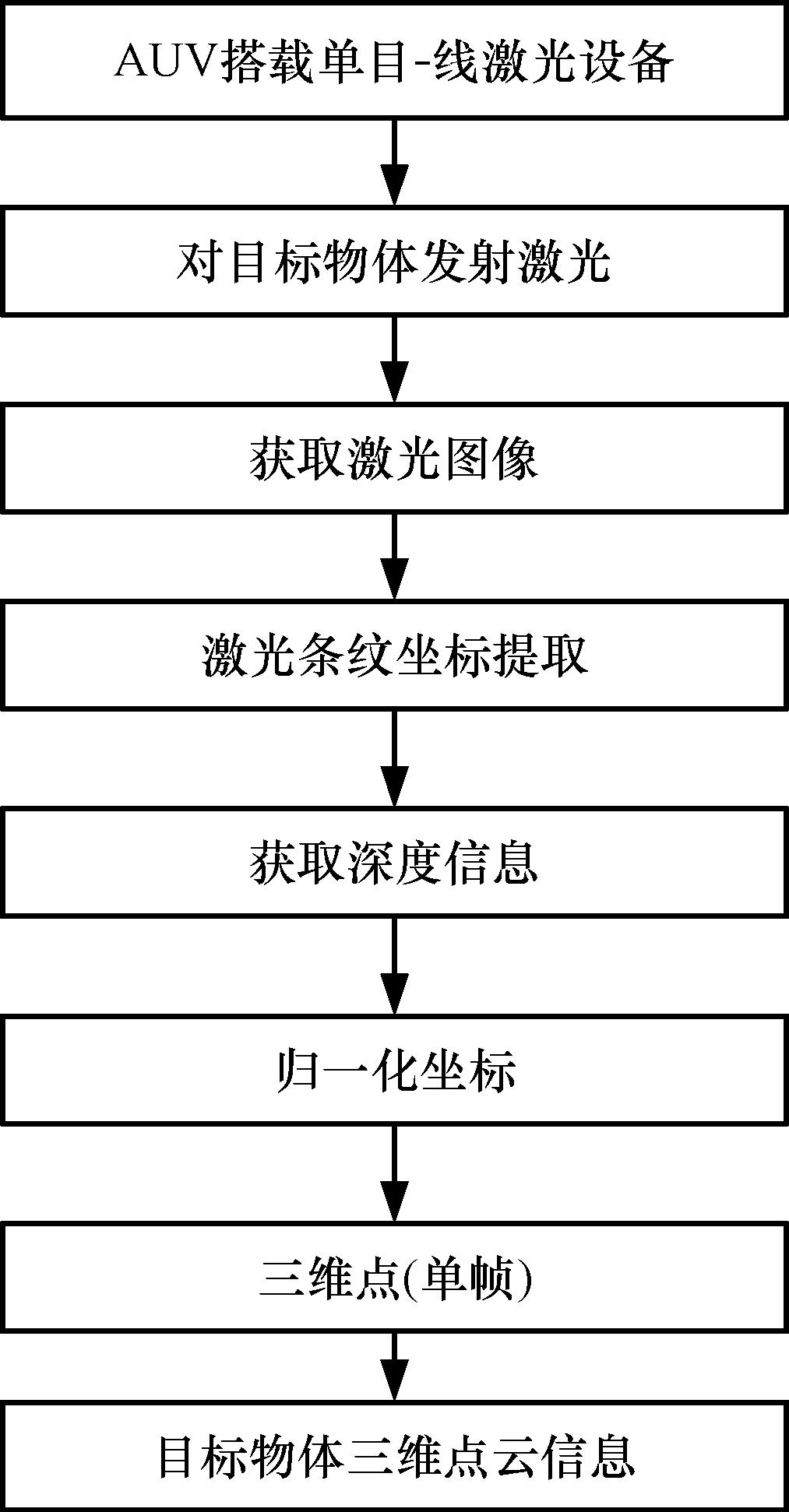
Fig.1 Monocular-line laser 3D point cloud reconstruction process
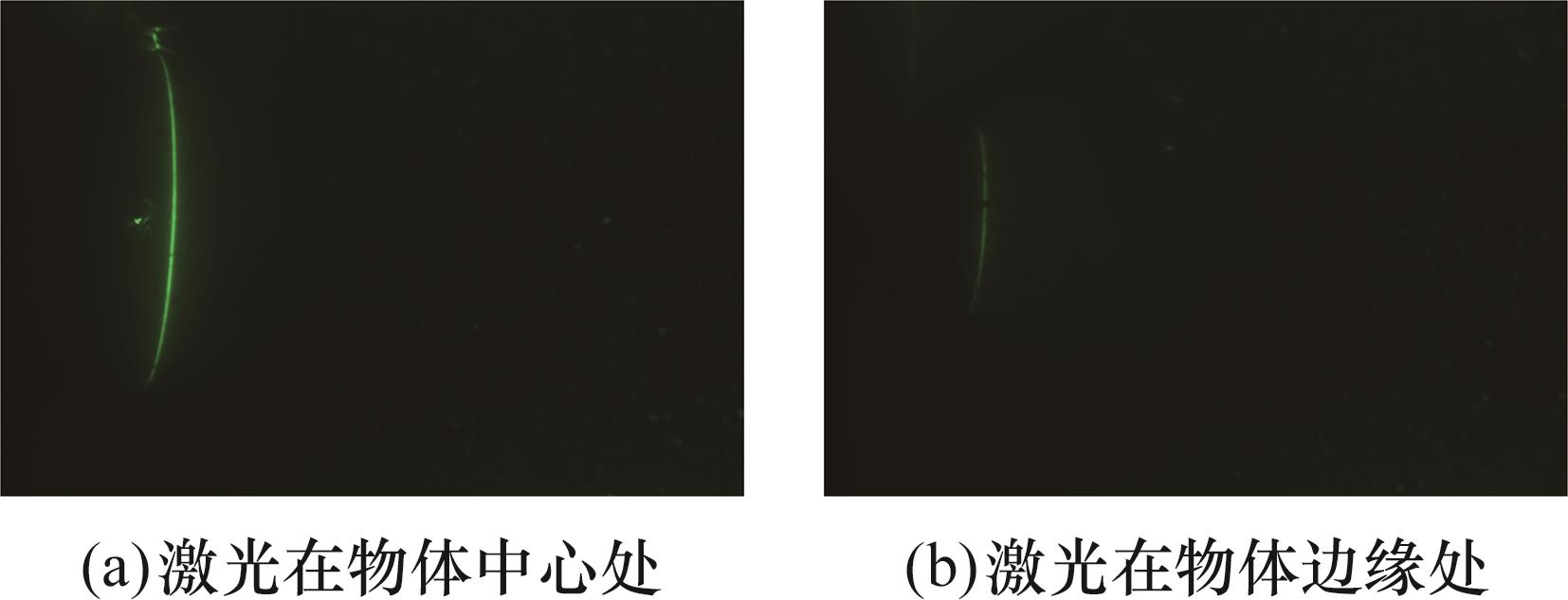
Fig.2 Collecting laser images of target objects
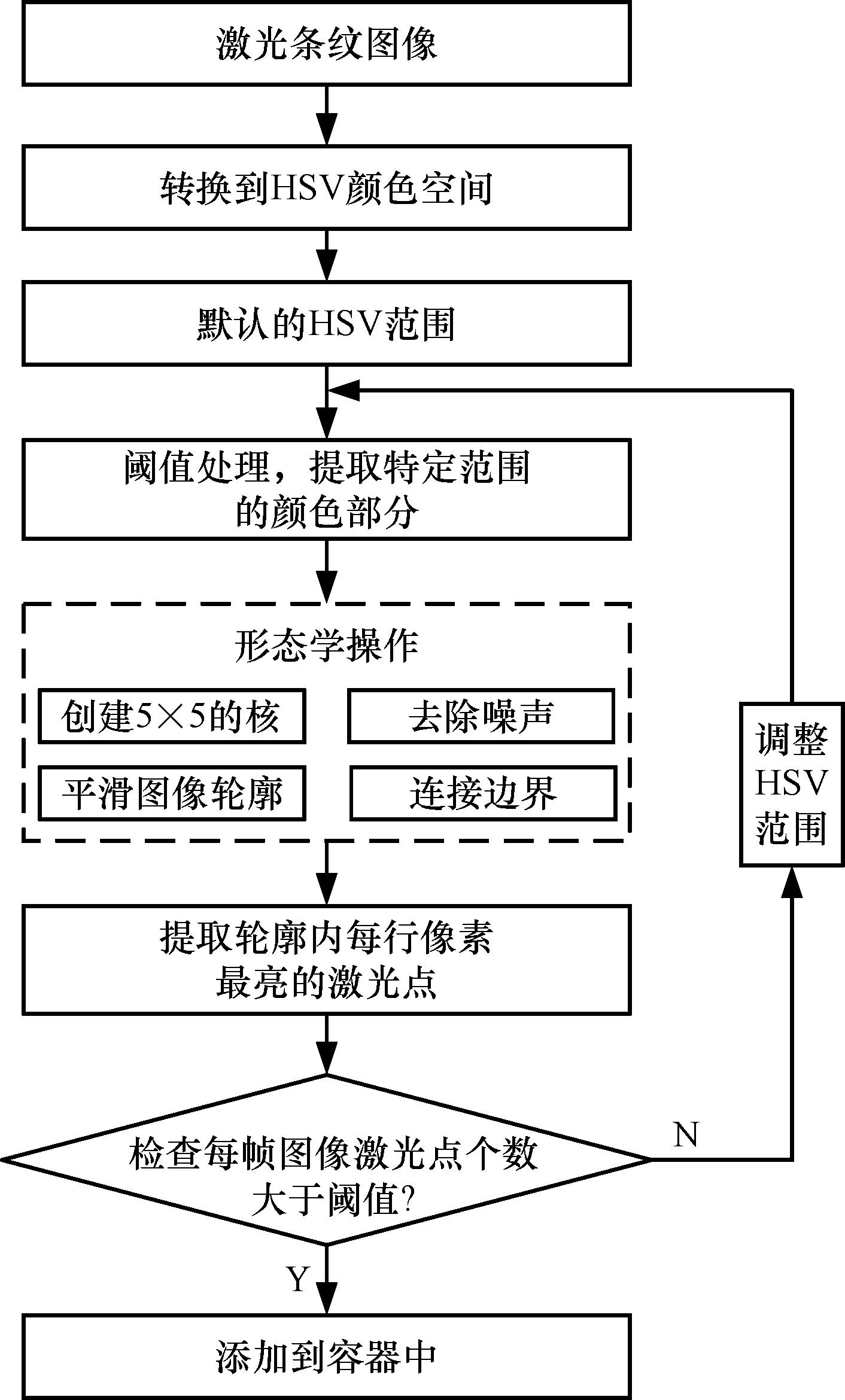
Fig.3 Adaptive HSV stripe center coordinate extraction method
| 性能指标 | 灰度重心法 | Steger法 | 本文算法 |
|---|---|---|---|
| 耗时/s | 1.35 | 1.06 | 0.82 |
| 提取点数 | 194 | 5134 | 472 |
Tab.1 Algorithm performance indicators
| 性能指标 | 灰度重心法 | Steger法 | 本文算法 |
|---|---|---|---|
| 耗时/s | 1.35 | 1.06 | 0.82 |
| 提取点数 | 194 | 5134 | 472 |
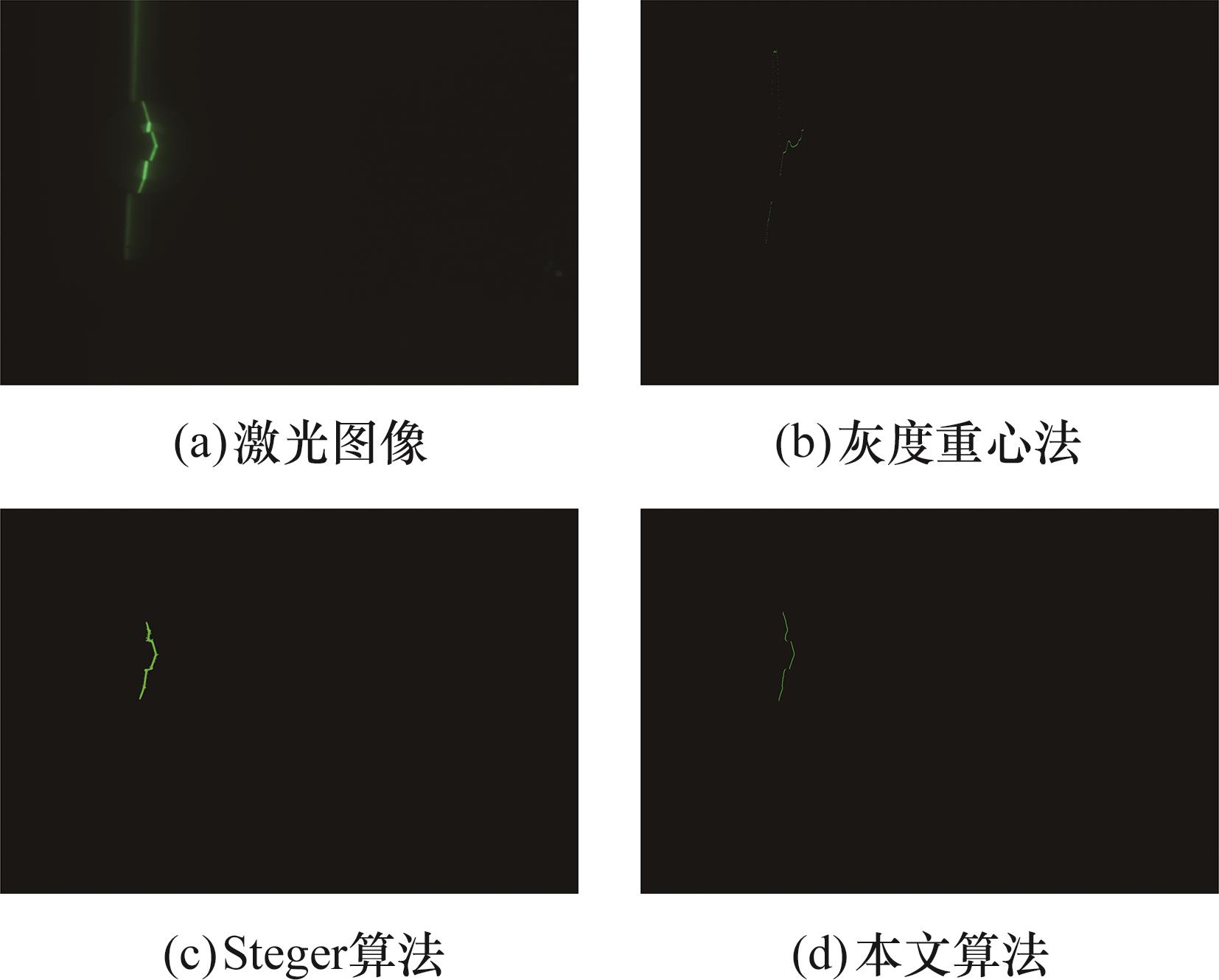
Fig.4 Laser point detection and extraction
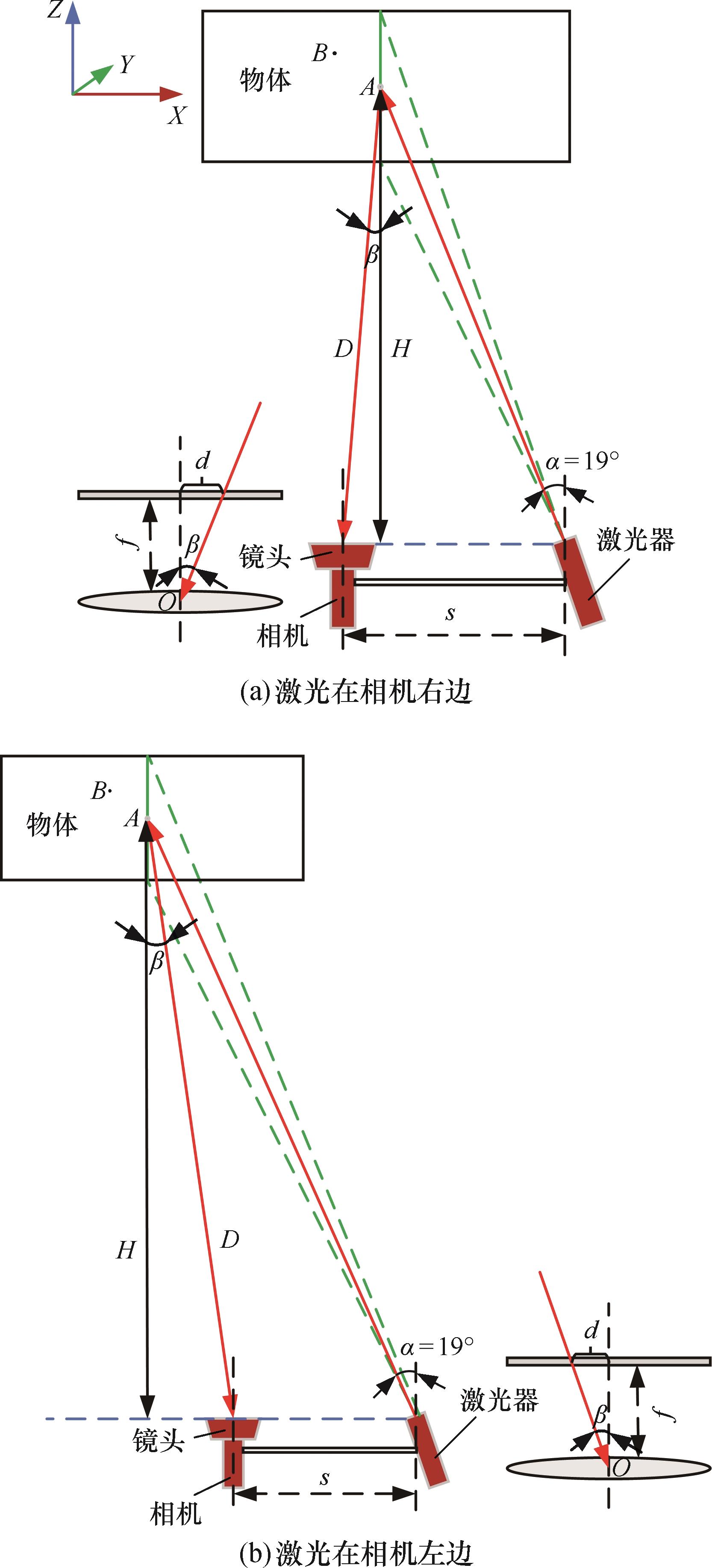
Fig.5 Target object imaging optical path diagram
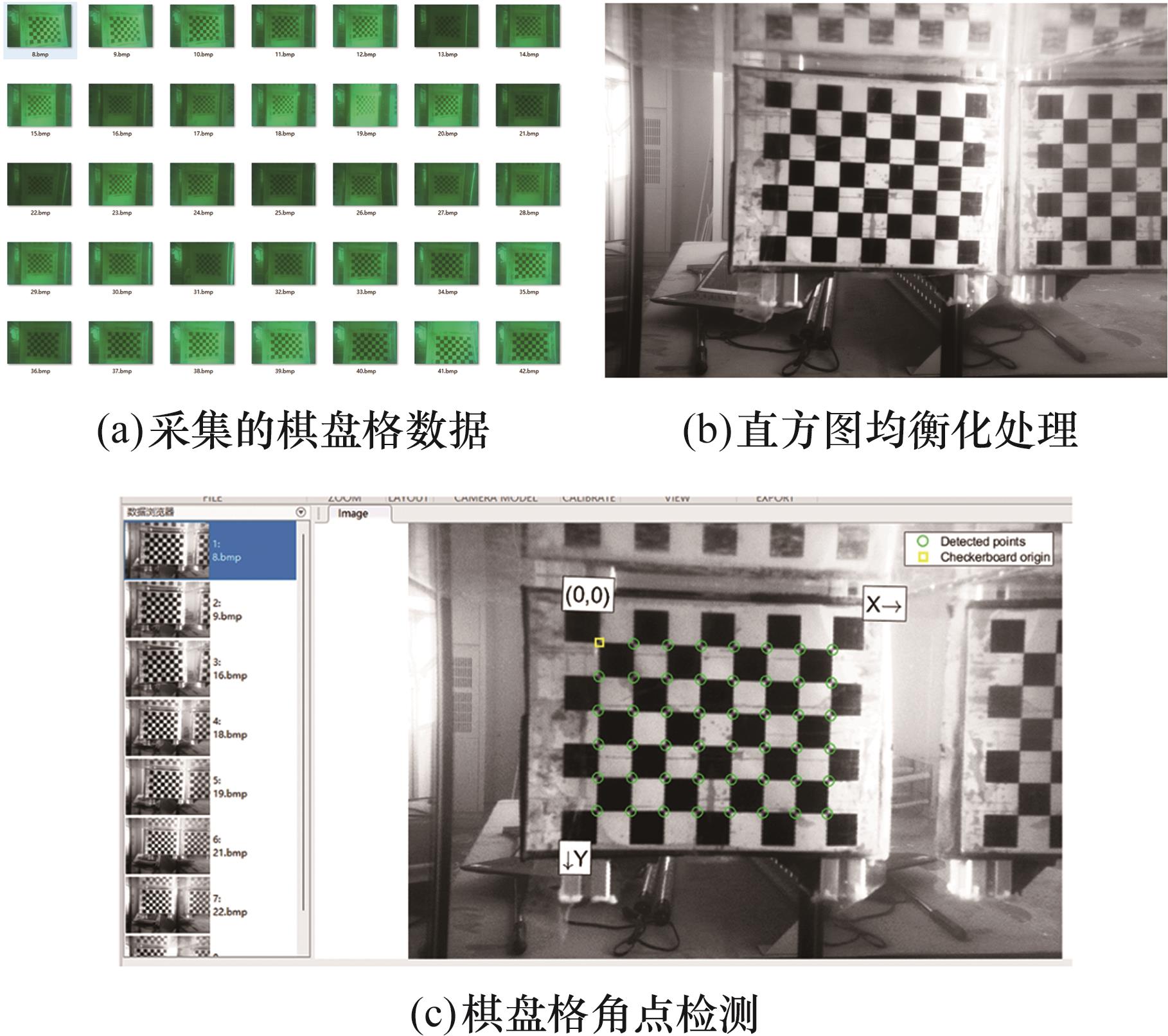
Fig.6 Camera internal parameter calibration process
| 内参 | 陆上 | 水下 |
|---|---|---|
| fx | 3454.4506 | 4308.8624 |
| fy | 3447.2332 | 4302.9958 |
| cx | 1600.8177 | 1379.5081 |
| cy | 995.7086 | 1031.0359 |
| k1 | 0.266 74 | |
| k2 | 0.145 68 | |
| p1 | ||
| p2 | 0.003 29 |
Tab.2 Camera internal parameter calibration result
| 内参 | 陆上 | 水下 |
|---|---|---|
| fx | 3454.4506 | 4308.8624 |
| fy | 3447.2332 | 4302.9958 |
| cx | 1600.8177 | 1379.5081 |
| cy | 995.7086 | 1031.0359 |
| k1 | 0.266 74 | |
| k2 | 0.145 68 | |
| p1 | ||
| p2 | 0.003 29 |
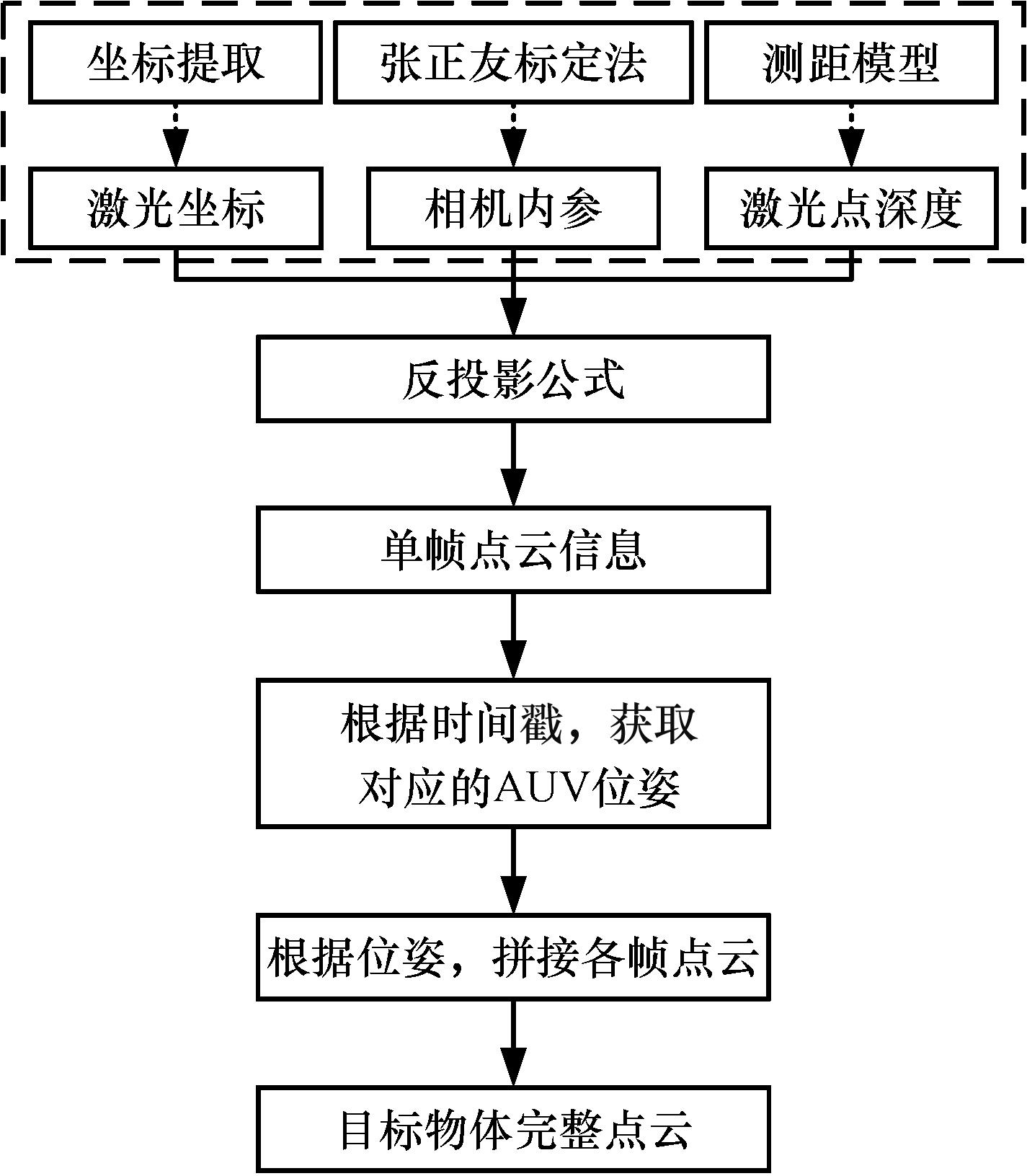
Fig.7 Coordinate conversion process
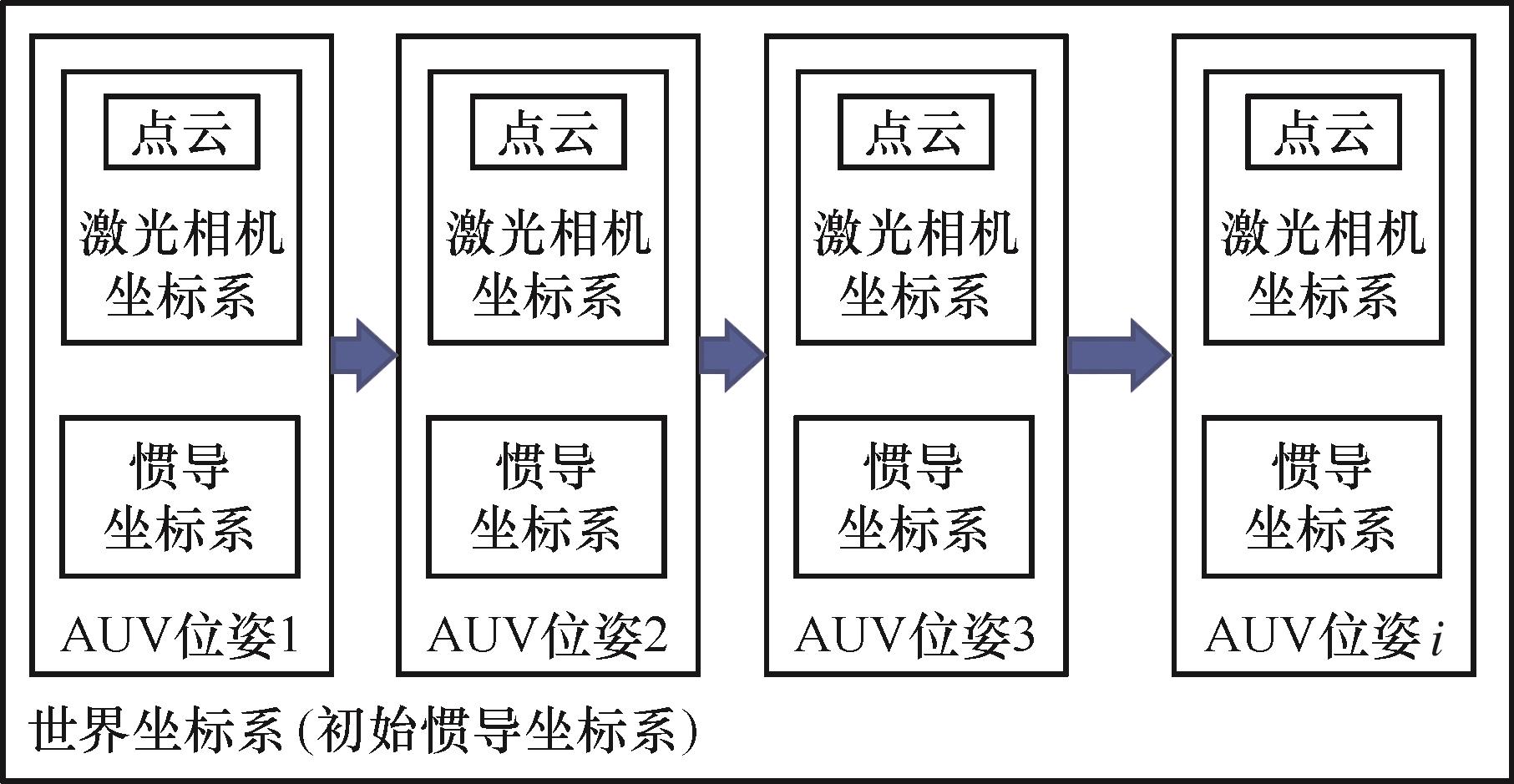
Fig.8 Point cloud stitching
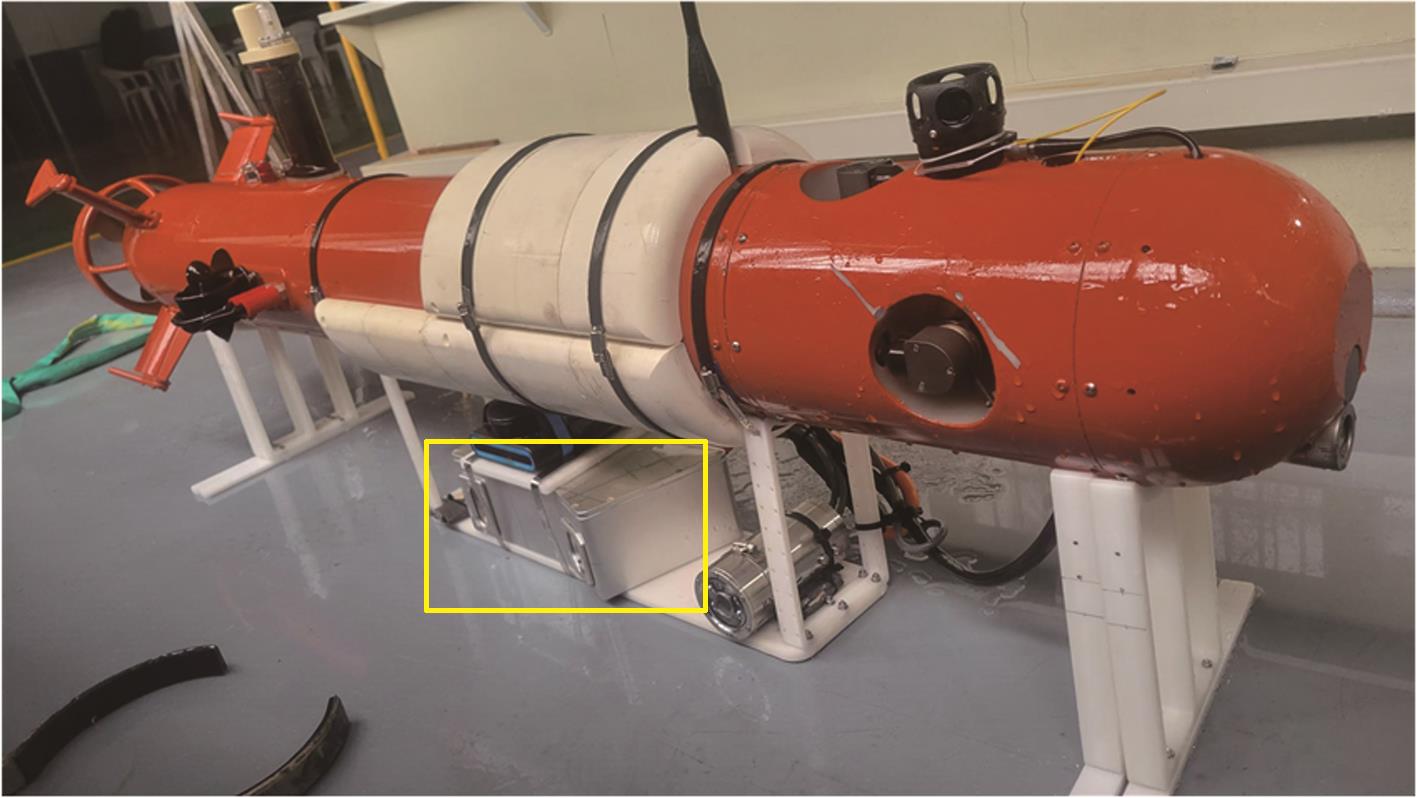
Fig.9 AUV equipped with monocular-line laser equipment(yellow box)
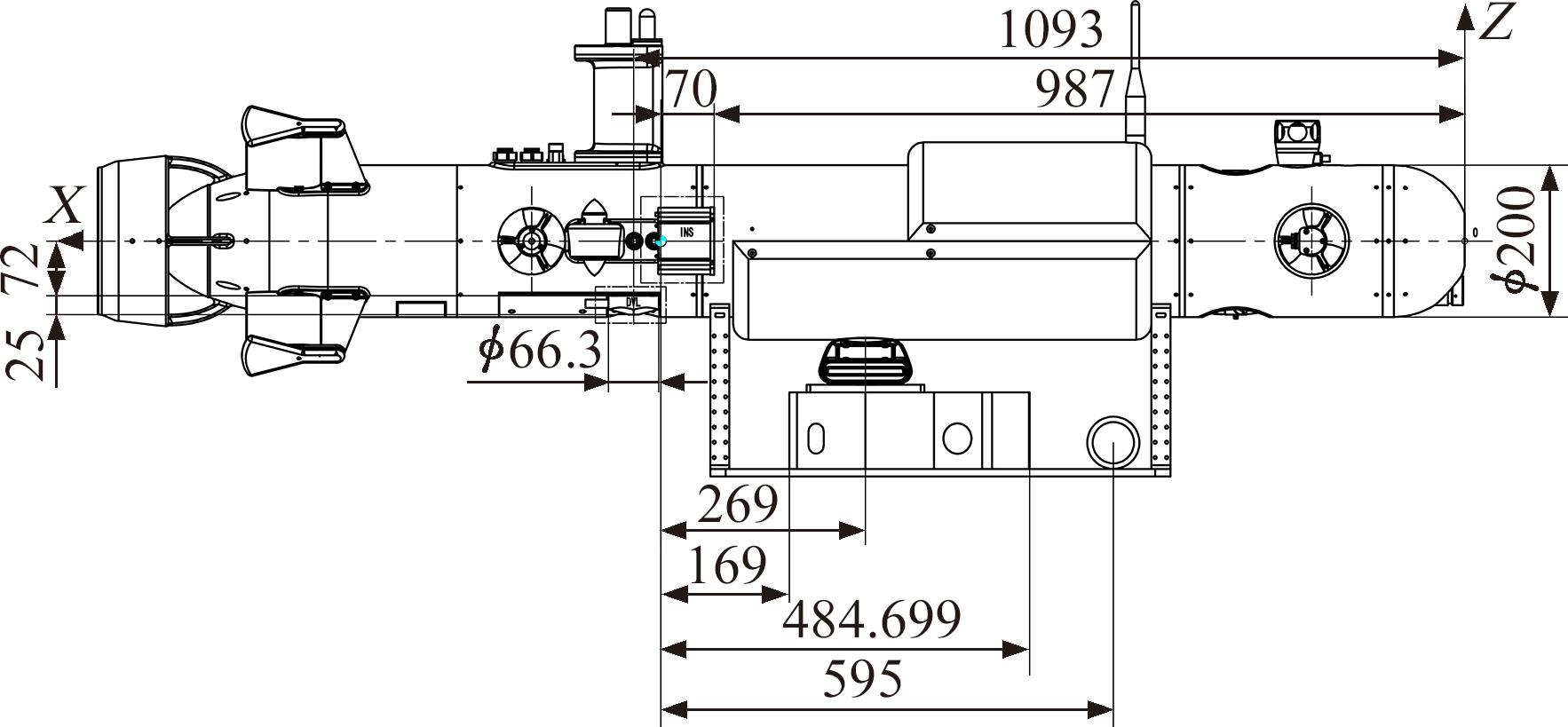
Fig.10 AUV 3D structural diagram
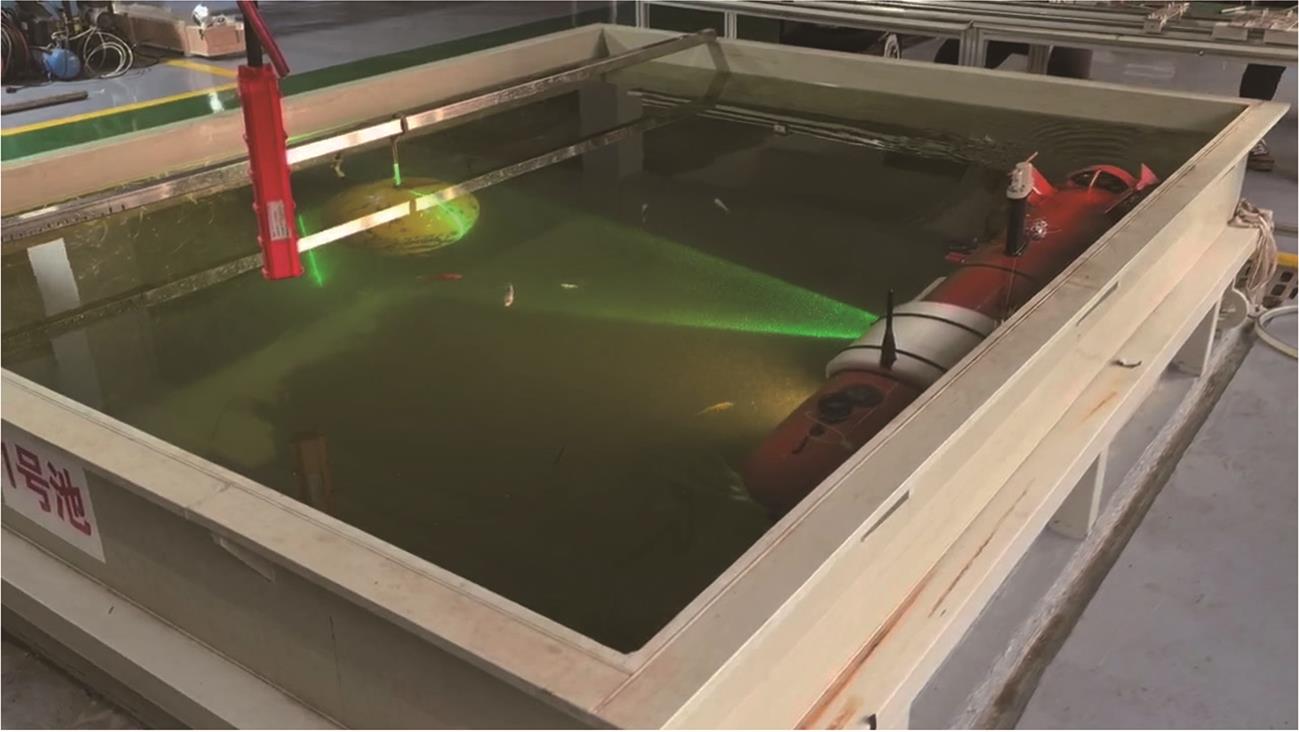
Fig.11 Small target object data collection experiment
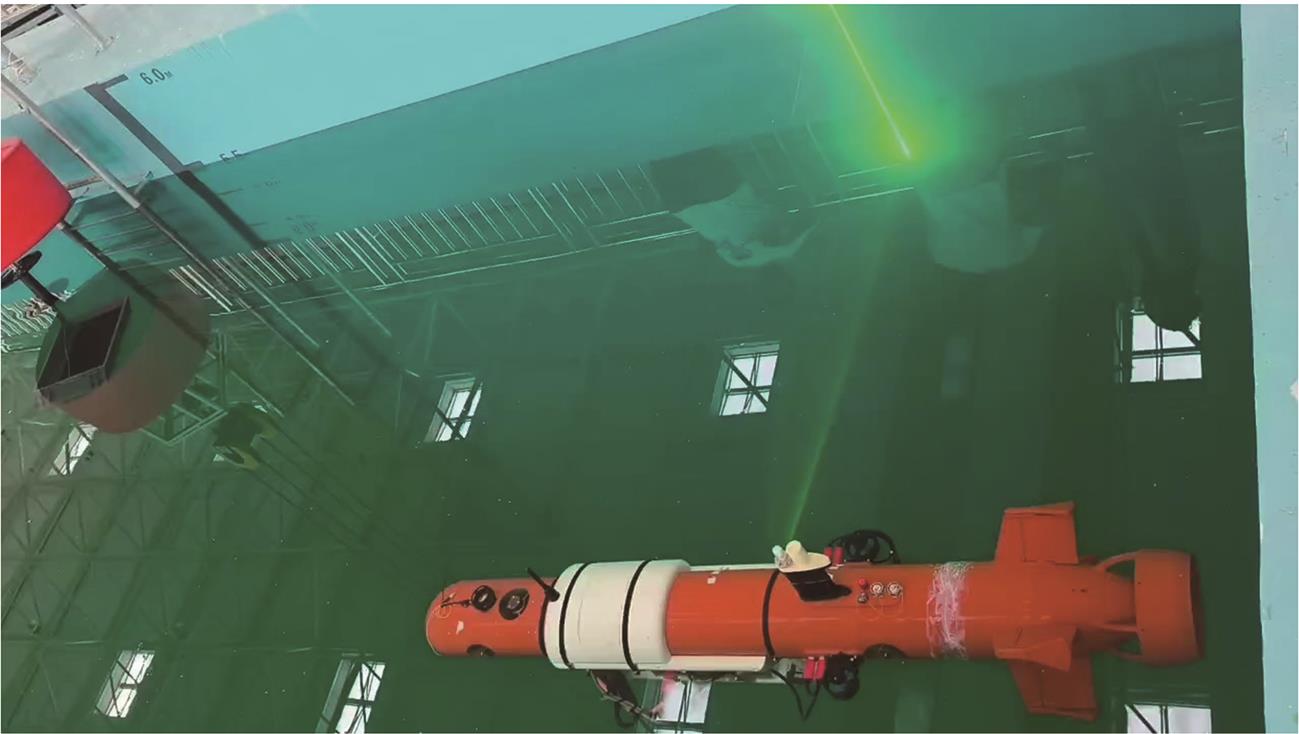
Fig.12 Experimental data collection of wall environment in large water tank
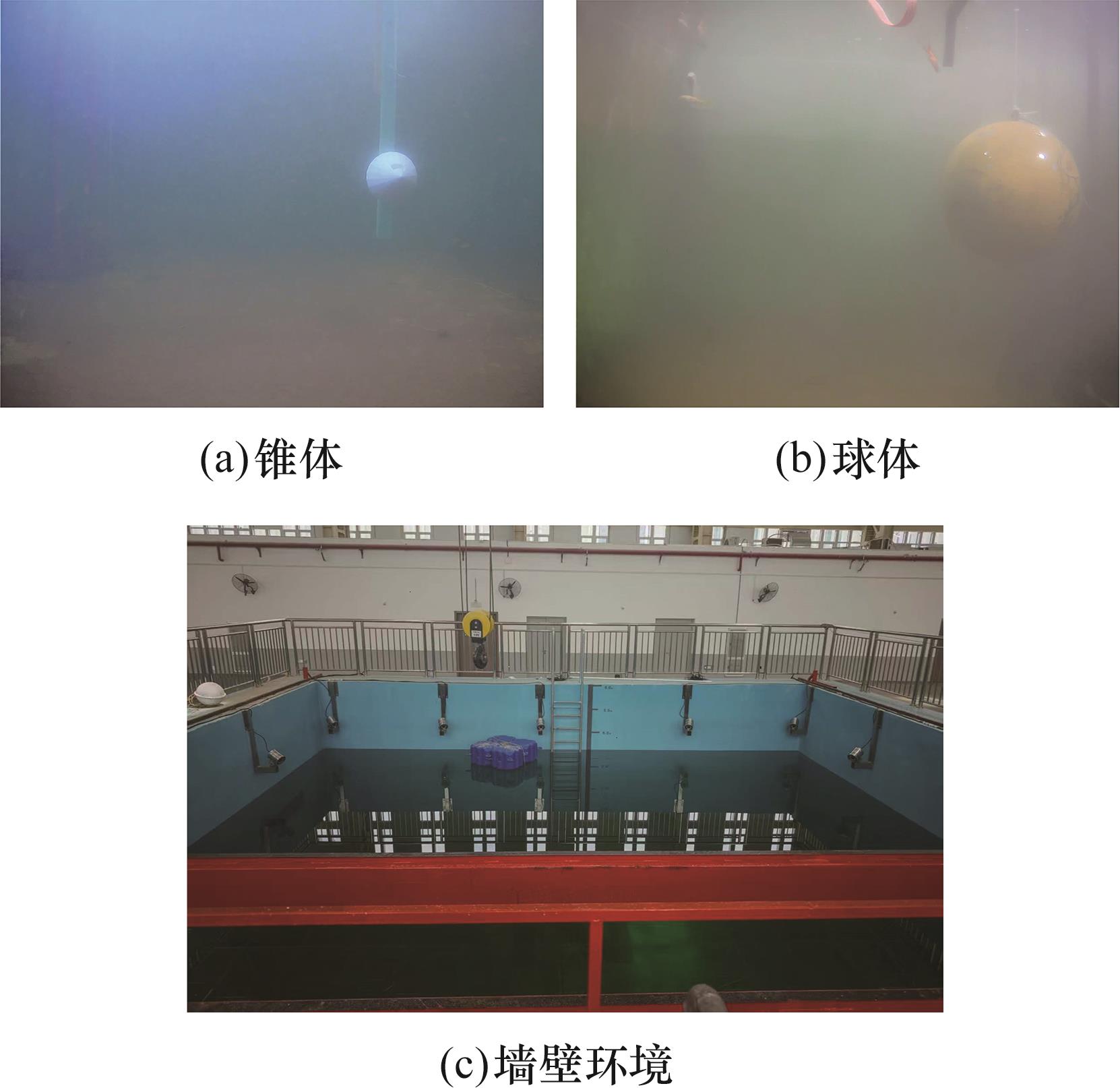
Fig.13 Test target and environment
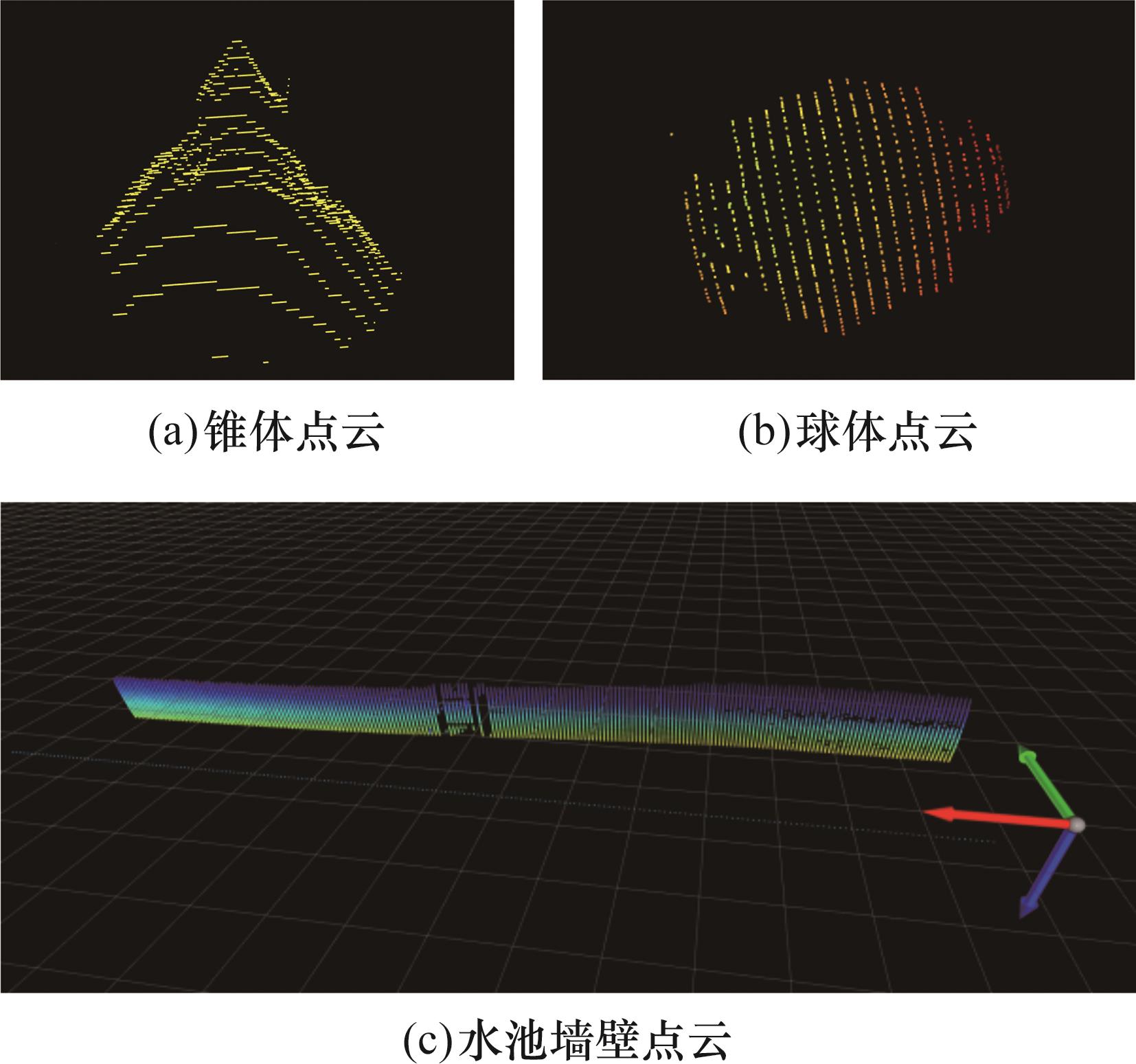
Fig.14 Point cloud reconstruction effect
| [1] | 高靖萱, 张亚, 孙风胜. AUV海底地形匹配导航方法综述[J]. 船舶工程, 2023, 45(2): 167-176. |
| GAO Jingxuan, ZHANG Ya, SUN Fengsheng. Review for AUV Seabed Terrain Aided Navigation Methods[J]. Ship Engineering, 2023, 45(2): 167-176. | |
| [2] | 刘朝. 基于深度学习的水下三维场景重建[D]. 镇江: 江苏科技大学, 2022. |
| LIU Zhao. Underwater 3D Scene Reconstruction Based on Deep Learning[D]. Zhenjiang: Jiangsu University of Science and Technology, 2022. | |
| [3] | 杨永俊. 基于视觉的近海捕捞ROV定位方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2023. |
| YANG Yongjun. Research on Visual Location Method for Offshore Fishing ROV[D]. Harbin: Harbin Engineering University, 2023. | |
| [4] | 仲恒. 基于双目立体视觉的三维重建研究[D]. 镇江: 江苏科技大学, 2023. |
| ZHONG Heng. Research on 3D Reconstruction Based on Binocular Stereo Vision[D]. Zhenjiang: Jiangsu University of Science and Technology, 2023. | |
| [5] | 王姮, 徐鹏, 林海涛, 等. 基于极线约束的水下目标激光重建方法[J]. 激光与光电子学进展, 2024, 61(22):280-288. |
| WANG Heng, XU Peng, LIN Haitao, et al. Underwater Target Laser Reconstruction Method Based on Epipolar Constraint[J]. Laser & Optoelectronics Progress, 2024, 61(22): 280-288. | |
| [6] | 陈国邦. 基于双目视觉的水下场景多线激光三维重建方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. |
| CHEN Guobang. Research on Multi-line Laser 3D Reconstruction of Underwater Scene Based on Binocular Vision[D]. Harbin: Harbin Engineering University, 2024. | |
| [7] | 杨树明, 瞿兴, 马椿洋. 基于事件相机的视觉测量综述[J]. 光学学报(网络版), 2024, 1(3):21-32. |
| YANG Shuming, QU Xing, MA Chunyang. Review of Event Camera-based Visual Measurement(Invited)[J]. Acta Optica Sinica (Online), 2024, 1(3): 21-32. | |
| [8] | 王佳欢. 基于线激光海底管道三维重建方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2022. |
| WANG Jiahuan. Research on Three-dimensional Reconstruction Method of Submarine Pipeline Based on Line Laser[D]. Harbin: Harbin Engineering University, 2022. | |
| [9] | 孙茜, 薛庆生, 张冬雪, 等. 水下目标物三维激光重建方法研究[J]. 红外与激光工程, 2022, 51(8): 234-240. |
| SUN Qian, XUE Qingsheng, ZHANG Dongxue, et al. Research on the 3D Laser Reconstruction Method of Underwater Targets[J]. Infrared and Laser Engineering, 2022, 51(8): 234-240. | |
| [10] | 赵子毅. 基于线结构光的深海小区域三维重建[D]. 青岛: 青岛科技大学, 2020. |
| ZHAO Ziyi. 3D Reconstruction of Deep Sea Area Based on Line Structured Light[D]. Qingdao: Qingdao University of Science & Technology, 2020. | |
| [11] | XUE Qingsheng, SUN Qian, WANG Fupeng, et al. Underwater High-precision 3D Reconstruction System Based on Rotating Scanning[J]. Sensors, 2021, 21(4):1402. |
| [12] | 李奕轩. 水下载体姿态对三维重建影响的半实物仿真系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. |
| LI Yixuan. A Semi Physical Simulation System Study on the Influence of Underwater Body Posture on 3D Reconstruction[D]. Harbin: Harbin Engineering University, 2024. | |
| [13] | 张天驰, 刘宇轩. 深度学习驱动的水下图像处理研究进展[J]. 计算机科学, 2024, 51(): 283-294. |
| ZHANG Tianchi, LIU Yuxuan. Research Progress of Underwater Image Processing Based on Deep Learning[J]. Computer Science, 2024, 51(S1): 283-294. | |
| [14] | 孙志远. 基于结构光点云的水下目标三维重建技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2024. |
| SUN Zhiyuan. Research on Three-dimensional Reconstruction Technology of Underwater Targets Based on Structured Light Point Cloud[D]. Harbin: Harbin Engineering University, 2024. | |
| [15] | 彭铖, 张爱军. 一种线结构光亚像素中心坐标提取方法[J]. 激光杂志, 2023, 44(1): 56-61. |
| PENG Cheng, ZHANG Aijun. A Method for Extracting Sub-pixel Coordinates of Line Structured Light Centre[J]. Laser Journal, 2023, 44(1): 56-61. | |
| [16] | 俞圣池, 李佳康, 熊鑫泉, 等. 基于线激光三角测距法的鱼体测距研究[J]. 渔业现代化, 2024, 51(1): 80-89. |
| YU Shengchi, LI Jiakang, XIONG Xinquan, et al. Research on Fish Ranging Based on Line Laser Triangulation Ranging Method[J]. Fishery Modernization, 2024, 51(1): 80-89. |
| [1] | Hongchen WU, Xiaorong CHEN, Baiyang LI. Multi-threaded Semi-global Stereo Matching Method for Internal Inspection of Workpieces [J]. China Mechanical Engineering, 2025, 36(11): 2783-2791. |
| [2] | MEI Jie, QIN Jiarui, CHEN Dingfang, CHEN Kun, . SLAM-based Underwater Image Enhanced Visual 3D Reconstruction Method [J]. China Mechanical Engineering, 2024, 35(02): 268-279. |
| [3] | ZHANG Hongxin;WANG Mingzhu;QIU Haoran;JIANG Jingang. 3D Reconstruction Method of Castings Based on Monocular Image Sequences [J]. China Mechanical Engineering, 2018, 29(23): 2799-2803,2814. |
| [4] | ZHANG Hao, SUN Jianjun, MA Chenbo, TU Qiaoan. 3D Reconstruction and Characterization for Surface Topography of Mechanical Seals [J]. China Mechanical Engineering, 2017, 28(11): 1287-1291,1299. |
| [5] | LU Peng, YAN Chongjing, GU Qiushi. Transformation Method from Parametric Modeling to Direct Modeling [J]. China Mechanical Engineering, 2017, 28(08): 941-945. |
| [6] | Ke Fengkai, Chen Youping, Xie Jingming, Zhang Dailin. Internal and External Parameter Calibrations of a Camera Based on Convex Relaxation Optimization Algorithm [J]. China Mechanical Engineering, 2016, 27(05): 634-639,657. |
| [7] | Xu Kan, Li Wenlong, Wang Jianzhuang, Zhou Liping, Yin Zhouping, . A Method of Automatically Extracting and Corresponding Feature Point Based on Law of Delaunay Triangulation [J]. China Mechanical Engineering, 2016, 27(01): 7-13. |
| [8] | Yuan Tianran1;Cheng Xiaosheng2;Sun Quanping1. Mesh Model Restoration for Complex Holes [J]. China Mechanical Engineering, 2015, 26(12): 1669-1675. |
| [9] | Deng Zhiping;Wang Yu. Unstructured Surface Mesh Generation for Topography Using Interpolating Surface Modelling [J]. J4, 2009, 20(16): 0-1895. |
| [10] | Zhang Hui;Zhang Liyan;Wei Hu. Three-step Calibration for Binocular Stereo System [J]. J4, 2009, 20(16): 0-2015. |
| [11] | Song Xiaochun,;Zhao Daxing,; Zhong Yuning,. 3D Reconstruction Technology of the MFL Inspection Data [J]. J4, 2008, 19(8): 0-1007. |
| [12] | Ding Zhi’an;Zhang Liyan;Zheng Jiandong;Zhang Weizhong. Measurement of 3D Curve Structures by Using One Hand-held Digital Camera [J]. J4, 2008, 19(7): 0-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||