

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (5): 1160-1169.DOI: 10.3969/j.issn.1004-132X.2026.05.016
KE Zhenzheng1,2( ), WU Jianbo2, ZHANG Tianyu1, WANG Kai2, CHENG Liang1()
), WU Jianbo2, ZHANG Tianyu1, WANG Kai2, CHENG Liang1()
Received:2025-03-18
Online:2026-05-25
Published:2026-06-09
Contact:
CHENG Liang
柯臻铮1,2(), 吴剑波2, 张天宇1, 王恺2, 程亮1()
通讯作者:
程亮
作者简介:柯臻铮,男,1983 年生,工程师、博士研究生。研究方向为航空制造装备设计。 E-mail: kzzcaen@zju.edu.cn基金资助:CLC Number:
KE Zhenzheng, WU Jianbo, ZHANG Tianyu, WANG Kai, CHENG Liang. Integrated Kinematics Modeling and Parametric Calibration of Large Gantry Fiber Placement Machines[J]. China Mechanical Engineering, 2026, 37(5): 1160-1169.
柯臻铮, 吴剑波, 张天宇, 王恺, 程亮. 大型龙门铺丝机综合运动学建模及参数标定[J]. 中国机械工程, 2026, 37(5): 1160-1169.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.05.016
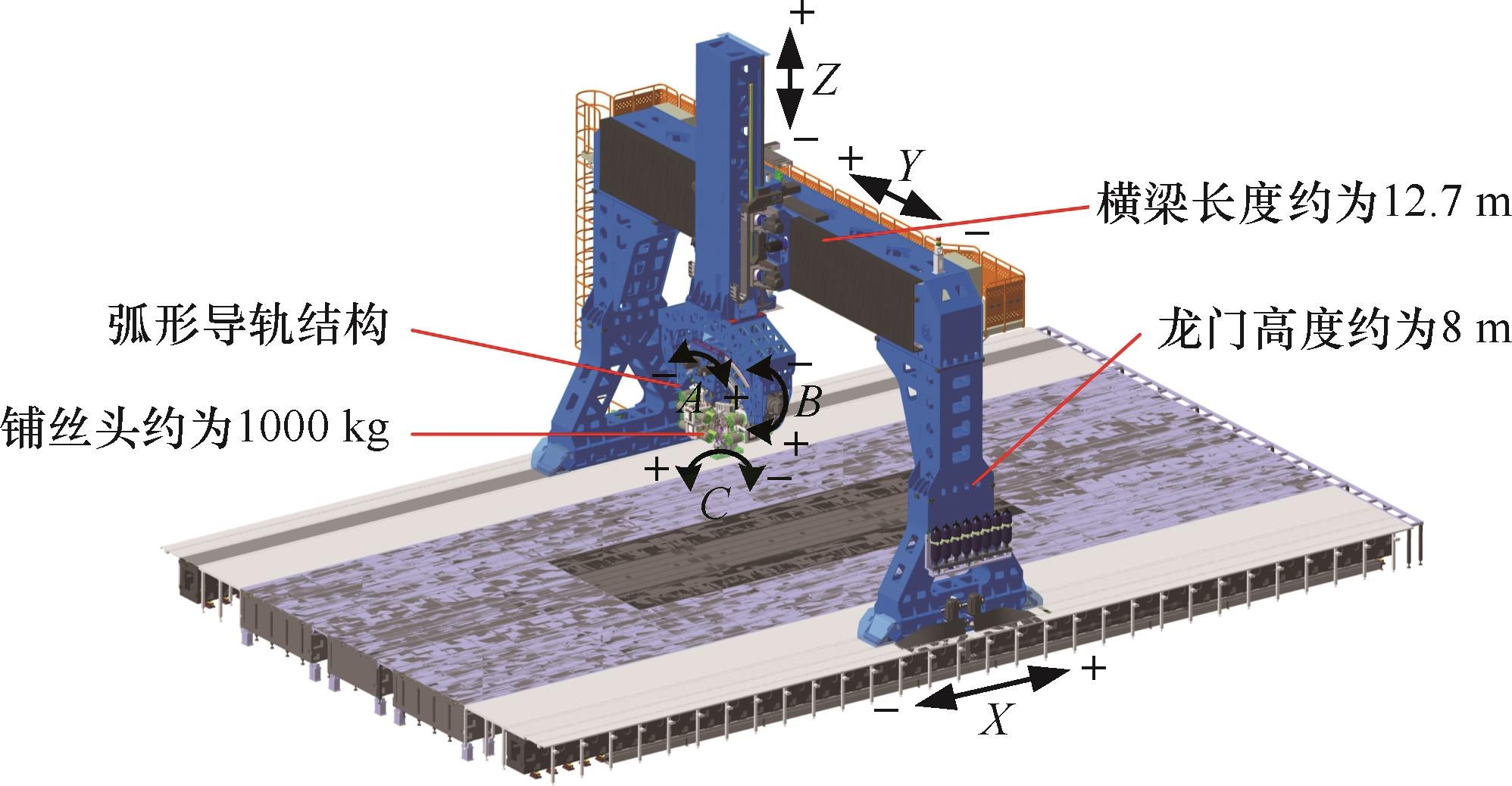
Fig.1 Gantry wire laying machine structure
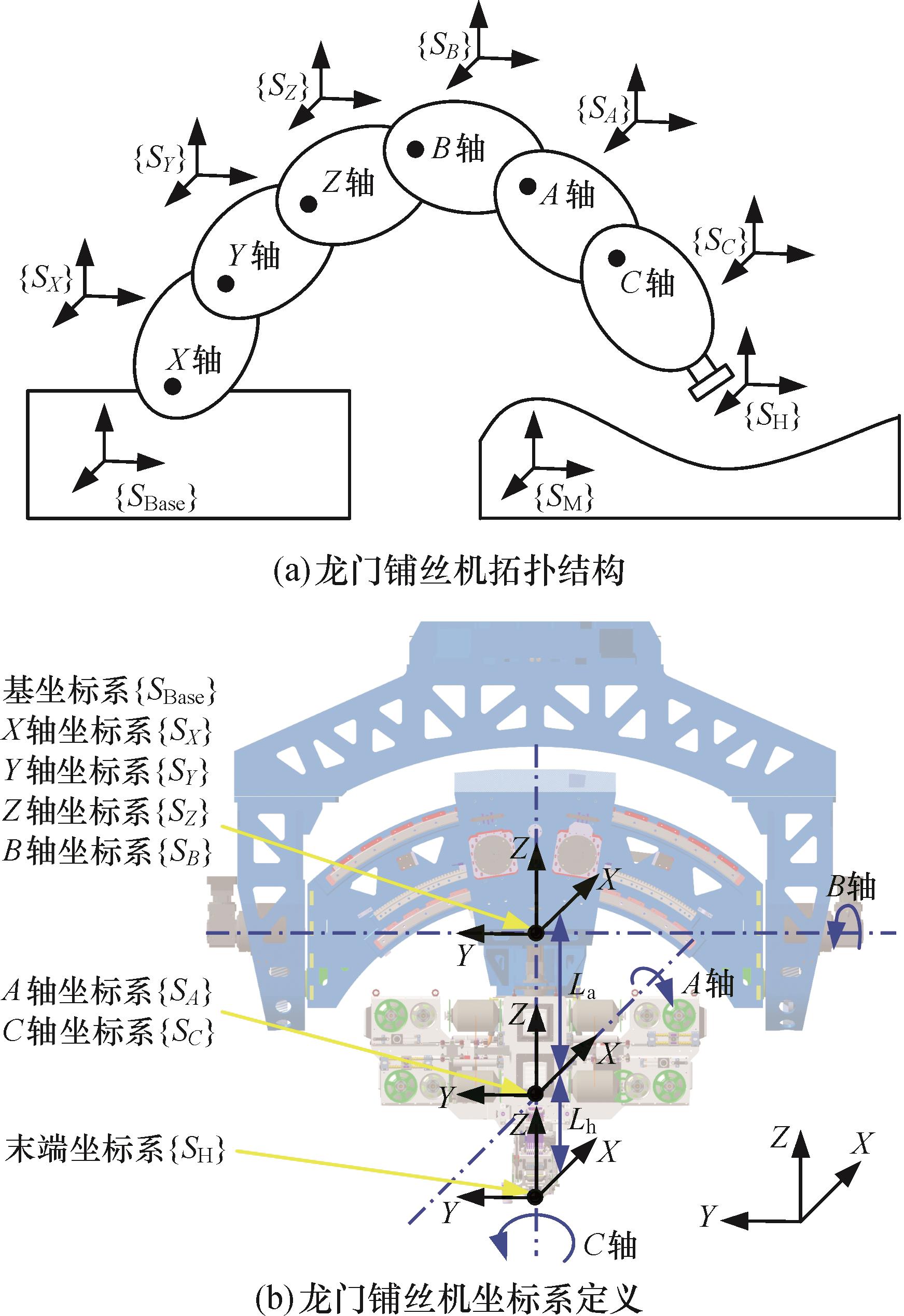
Fig.2 Gantry wire laying machine topology and coordinate system definition
| 误差源 | 引入数目 | 对应齐次变换矩阵 | 参数初值 | |
|---|---|---|---|---|
| 基坐标系偏差 | 6 | |||
| 轴偏差 | {SAct}-{SX } | 0 | ||
| {SX }-{SY } | 2 | |||
| {SY }-{SZ } | 2 | |||
| {SZ }-{SB } | 2 | |||
| {SB }-{SA } | 3 | |||
| {SA }-{SC } | 4 | |||
| 末端偏差 | {SC }-{SH} | 3 | ||
Tab.1 Kinematic parameters introduced by geometric deviations
| 误差源 | 引入数目 | 对应齐次变换矩阵 | 参数初值 | |
|---|---|---|---|---|
| 基坐标系偏差 | 6 | |||
| 轴偏差 | {SAct}-{SX } | 0 | ||
| {SX }-{SY } | 2 | |||
| {SY }-{SZ } | 2 | |||
| {SZ }-{SB } | 2 | |||
| {SB }-{SA } | 3 | |||
| {SA }-{SC } | 4 | |||
| 末端偏差 | {SC }-{SH} | 3 | ||
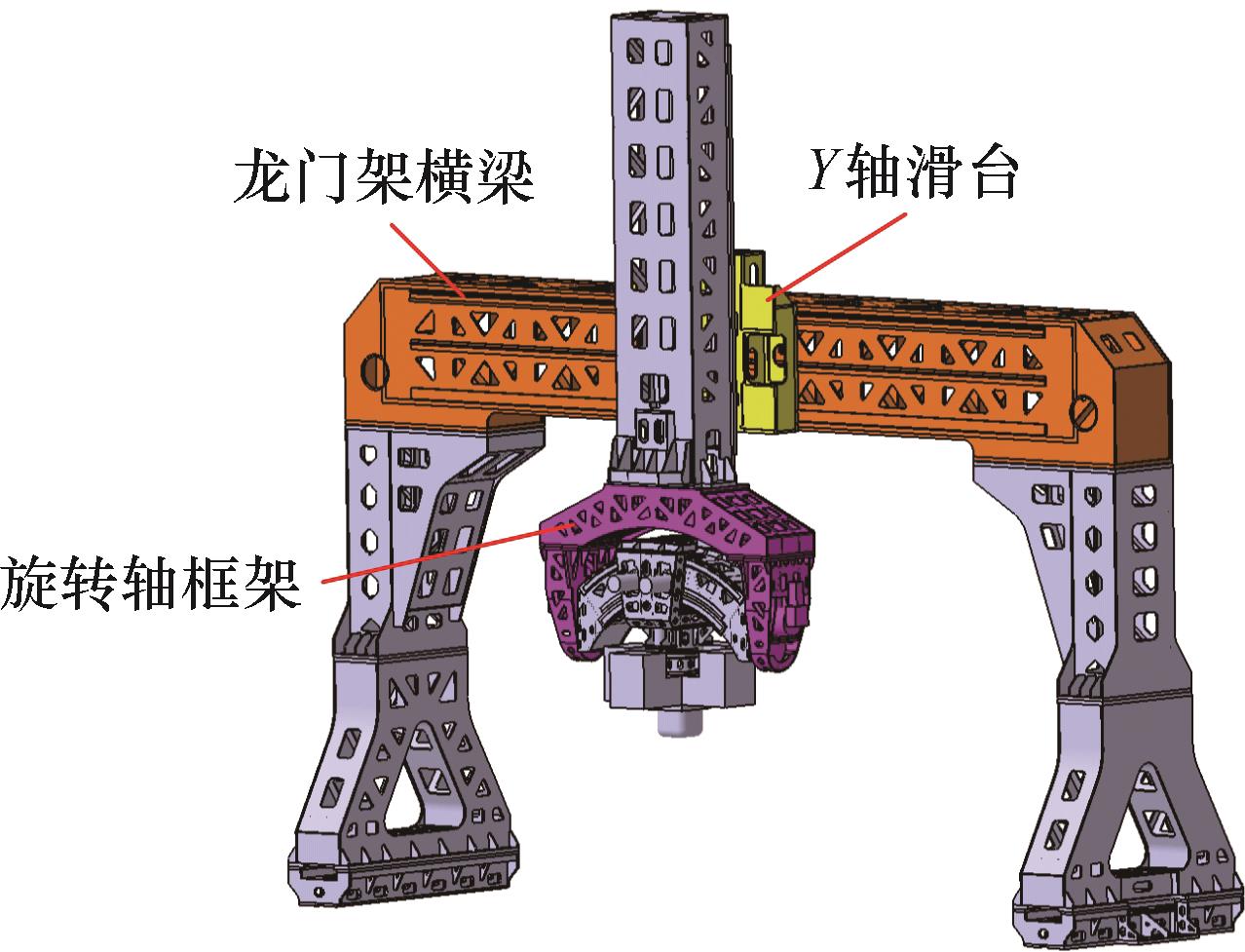
Fig.3 Structural distribution of gantry wire spreaders prone to gravitational deformation
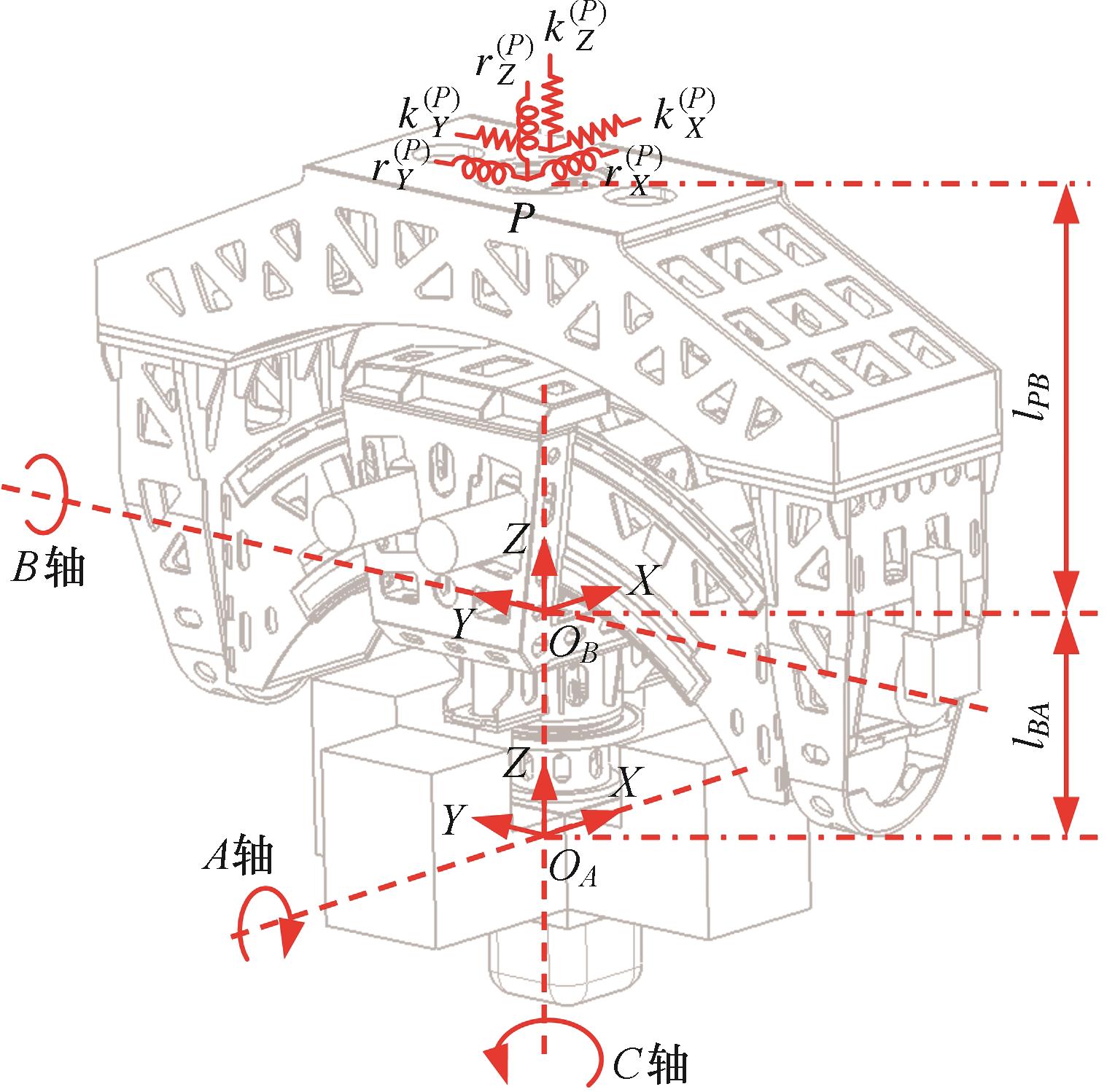
Fig.4 Rotary axis frame force analysis
Fig.5 Y-axis slide table force analysis
Fig.6 Crossbeam force analysis
| 重力变形分量 | 参数数目 | 运动学参数 | 参数初值 |
|---|---|---|---|
| 4 | |||
| 4 | |||
| 0 | |||
| 6 | |||
| 2 | |||
| 2 |
Tab.2 Kinematic parameters introduced by gravitational deformation
| 重力变形分量 | 参数数目 | 运动学参数 | 参数初值 |
|---|---|---|---|
| 4 | |||
| 4 | |||
| 0 | |||
| 6 | |||
| 2 | |||
| 2 |
Fig.7 Schematic diagram of measuring tooling
Fig.8 Experimental platform and measurement data acquisition
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.55 | 0.71 | 0 | 0.03 | ||||
| 0.47 | 0.24 | 0 | 0 | ||||
| 0 | 0 | ||||||
| 0 | 0.01 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0 | 0 | 0 | ||||
| 0 | |||||||
| 0 | 0.18 | 0.37 | |||||
| 0 | 0 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0.01 |
Tab.3 Identification results of kinematic parameters introduced by geometric errors
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.55 | 0.71 | 0 | 0.03 | ||||
| 0.47 | 0.24 | 0 | 0 | ||||
| 0 | 0 | ||||||
| 0 | 0.01 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0 | 0 | 0 | ||||
| 0 | |||||||
| 0 | 0.18 | 0.37 | |||||
| 0 | 0 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0.01 |
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.01 | 1994.39 | ||||||
| 0 | 2.6×10 | ||||||
| 0 | 1.6×10 | ||||||
| 0 | |||||||
| 0 | |||||||
| 0 | |||||||
| 0.17 | 0 | ||||||
| 0 | 1.82 | ||||||
| 3400.97 |
Tab.4 Identification results of kinematic parameters introduced by gravitational deformation
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.01 | 1994.39 | ||||||
| 0 | 2.6×10 | ||||||
| 0 | 1.6×10 | ||||||
| 0 | |||||||
| 0 | |||||||
| 0 | |||||||
| 0.17 | 0 | ||||||
| 0 | 1.82 | ||||||
| 3400.97 |
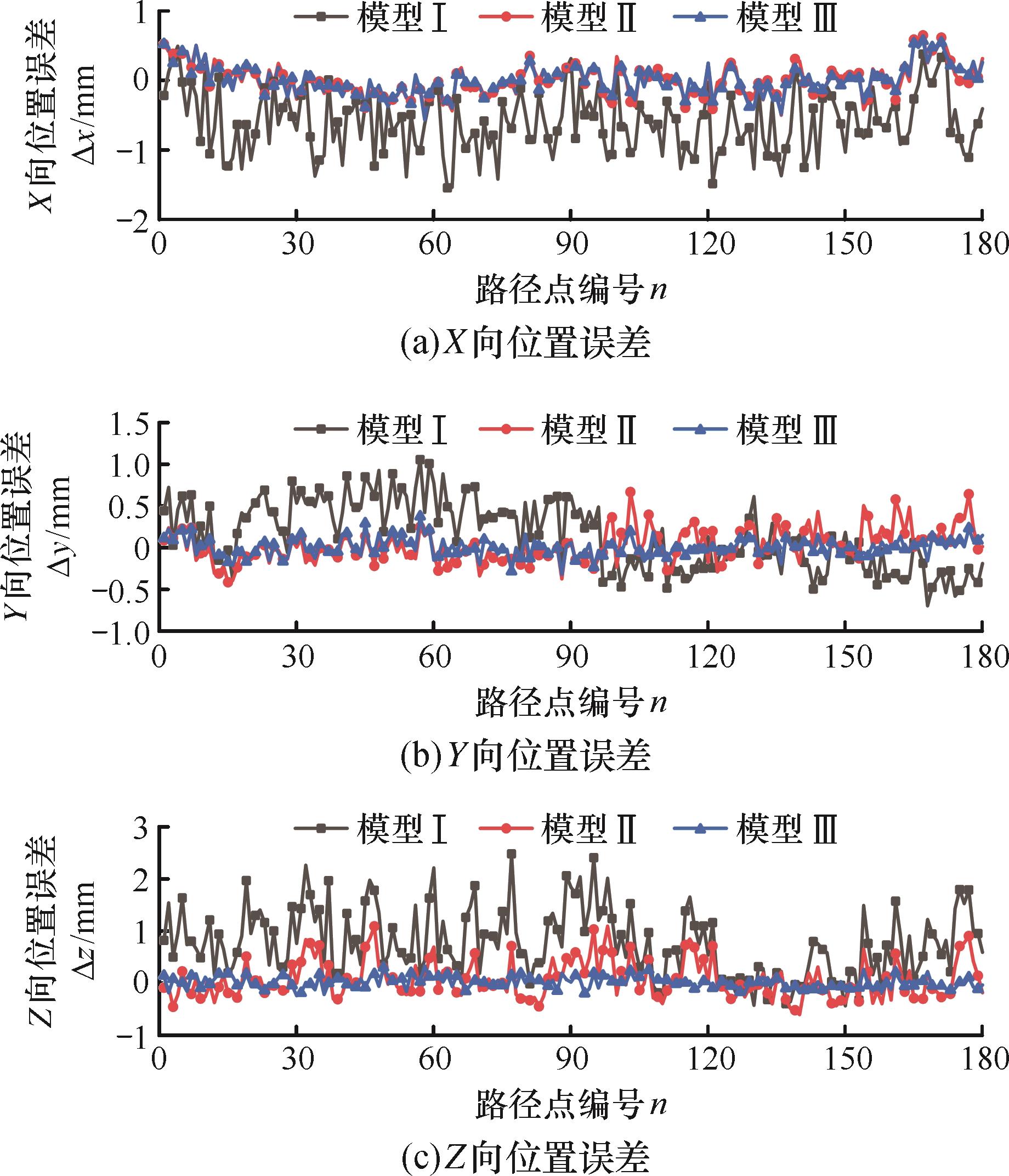
Fig.9 Comparison of residual errors
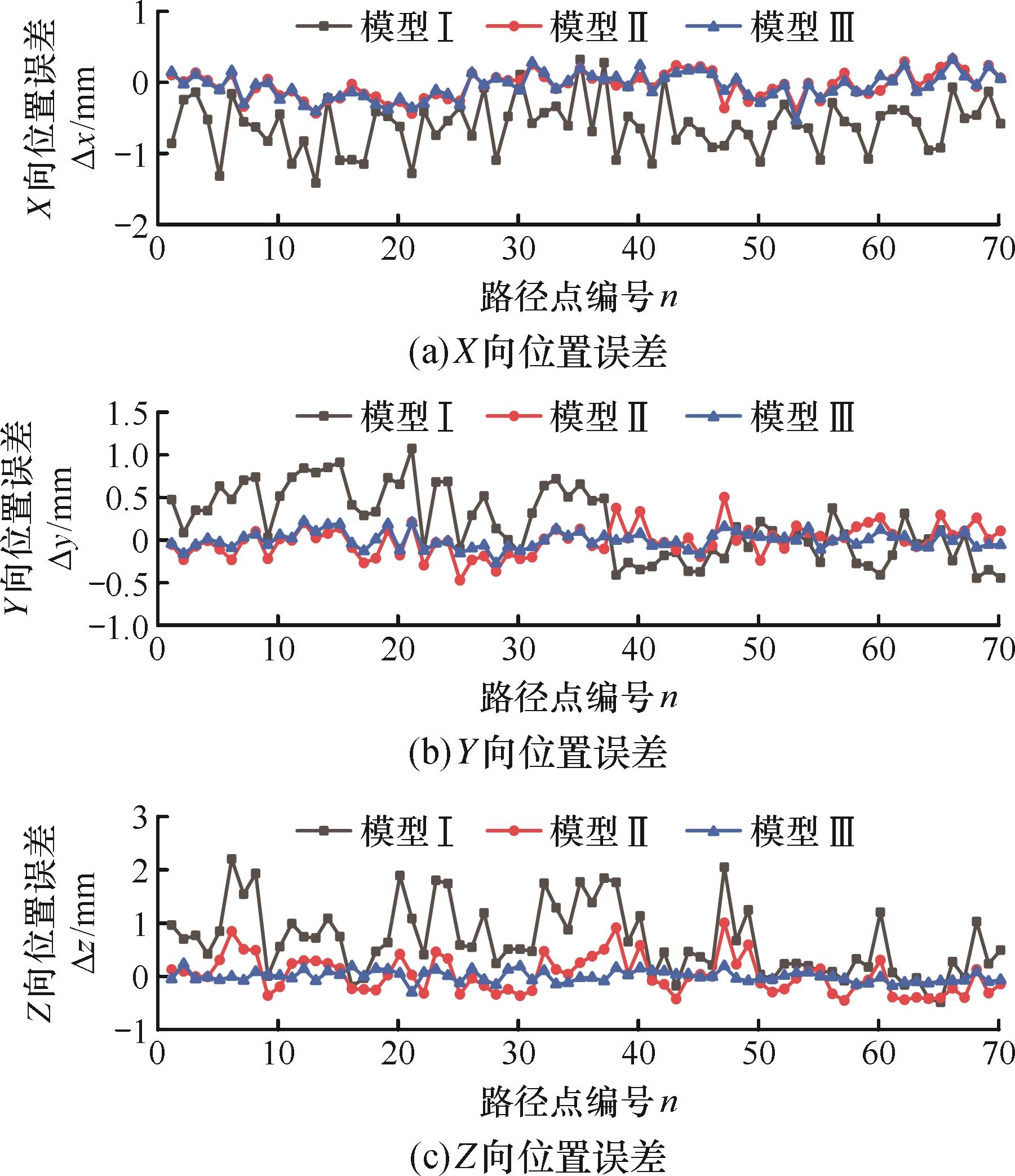
Fig.10 Comparison of prediction errors
| 参数 | 残余误差 | 预测误差 | |||||
|---|---|---|---|---|---|---|---|
| 平均值 | 模型Ⅰ/mm | 0.641 | 0.362 | 0.802 | 0.633 | 0.368 | 0.724 |
| 模型Ⅱ/mm | 0.179 | 0.156 | 0.283 | 0.153 | 0.135 | 0.280 | |
| 减小比例/% | 72.1 | 56.9 | 64.7 | 75.8 | 63.3 | 61.3 | |
| 模型Ⅲ/mm | 0.167 | 0.081 | 0.092 | 0.153 | 0.079 | 0.086 | |
| 减小比例/% | 74.0 | 77.5 | 88.6 | 75.8 | 78.6 | 88.1 | |
| 最大值 | 模型Ⅰ/mm | 1.54 | 1.05 | 2.48 | 1.42 | 1.07 | 2.20 |
| 模型Ⅱ/mm | 0.649 | 0.667 | 1.09 | 0.44 | 0.503 | 1.00 | |
| 减小比例/% | 57.9 | 36.5 | 56.0 | 69.0 | 53.0 | 54.5 | |
| 模型Ⅲ/mm | 0.569 | 0.375 | 0.332 | 0.538 | 0.275 | 0.300 | |
| 减小比例/% | 63.1 | 64.2 | 86.6 | 62.1 | 74.3 | 86.4 | |
Tab.5 Statistical analysis table of error data
| 参数 | 残余误差 | 预测误差 | |||||
|---|---|---|---|---|---|---|---|
| 平均值 | 模型Ⅰ/mm | 0.641 | 0.362 | 0.802 | 0.633 | 0.368 | 0.724 |
| 模型Ⅱ/mm | 0.179 | 0.156 | 0.283 | 0.153 | 0.135 | 0.280 | |
| 减小比例/% | 72.1 | 56.9 | 64.7 | 75.8 | 63.3 | 61.3 | |
| 模型Ⅲ/mm | 0.167 | 0.081 | 0.092 | 0.153 | 0.079 | 0.086 | |
| 减小比例/% | 74.0 | 77.5 | 88.6 | 75.8 | 78.6 | 88.1 | |
| 最大值 | 模型Ⅰ/mm | 1.54 | 1.05 | 2.48 | 1.42 | 1.07 | 2.20 |
| 模型Ⅱ/mm | 0.649 | 0.667 | 1.09 | 0.44 | 0.503 | 1.00 | |
| 减小比例/% | 57.9 | 36.5 | 56.0 | 69.0 | 53.0 | 54.5 | |
| 模型Ⅲ/mm | 0.569 | 0.375 | 0.332 | 0.538 | 0.275 | 0.300 | |
| 减小比例/% | 63.1 | 64.2 | 86.6 | 62.1 | 74.3 | 86.4 | |
| [1] | 黄亿洲, 王志瑾, 刘格菲. 碳纤维增强复合材料在航空航天领域的应用[J]. 西安航空学院学报, 2021, 39(5): 44-51. |
| HUANG Yizhou, WANG Zhijin, LIU Gefei. Application of Carbon Fiber Reinforced Composite in Aerospace[J]. Journal of Xi'an Aeronautical University, 2021, 39(5): 44-51. | |
| [2] | 郝元恺, 肖加余. 高性能复合材料学[M]. 北京: 化学工业出版社, 2004. |
| HAO Yuankai, XIAO Jiayu. High Performance Composite Materials Science[M]. Beijing: Chemical Industry Press, 2004. | |
| [3] | 张晓虎, 孟宇, 张炜. 碳纤维增强复合材料技术发展现状及趋势[J]. 纤维复合材料, 2004, 21(1): 50-53. |
| ZHANG Xiaohu, MENG Yu, ZHANG Wei. The State of the Art and Trend of Carbon Fiber Reinforced Composites[J]. Fiber Composites, 2004, 21(1): 50-53. | |
| [4] | 王显峰, 严飙, 薛柯, 等. 机器人高效自动铺丝技术研究进展[J]. 航空制造技术, 2019, 59(16): 14-20. |
| WANG Xianfeng, YAN Biao, XUE Ke, et al. Research Progress of Robot Automatic Placement Technology with High Efficiency[J]. Aeronautical Manufacturing Technology, 2019, 59(16): 14-20. | |
| [5] | ZHAO Dan, BI Yunbo, KE Yinglin. An Efficient Error Compensation Method for Coordinated CNC Five-axis Machine Tools[J]. International Journal of Machine Tools and Manufacture, 2017, 123: 105-115. |
| [6] | ZHANG Zhao, JIANG Feng, LUO Ming, et al. Geometric Error Measuring, Modeling, and Compensation for CNC Machine Tools: a Review[J]. Chinese Journal of Aeronautics, 2024, 37(2): 163-198. |
| [7] | 谢核. 机器人加工几何误差建模及工程应用[D]. 武汉: 华中科技大学, 2019. |
| XIE He. Geometric Error Modeling and Its Engineering Application in Robotic Machining[D]. Wuhan: Huazhong University of Science and Technology, 2019. | |
| [8] | 董泽园, 李杰, 刘辛军, 等. 数控机床两种几何误差建模方法有效性试验研究[J]. 机械工程学报, 2019, 55(5): 137-147. |
| DONG Zeyuan, LI Jie, LIU Xinjun, et al. Experimental Study on the Effectiveness of Two Different Geometric Error Modeling Methods for Machine Tools[J]. Journal of Mechanical Engineering, 2019, 55(5): 137-147. | |
| [9] | 郭世杰, 梅雪松, 姜歌东. 基于平面光栅的机床几何误差测量与辨识[J]. 计算机集成制造系统, 2020, 26(8): 2037-2049. |
| GUO Shijie, MEI Xuesong, JIANG Gedong. Geometric Error Measurement and Identification of Machine Tool Based on Gross Grid Encoder[J]. Computer Integrated Manufacturing Systems, 2020, 26(8): 2037-2049. | |
| [10] | ZHU Shaowei, DING Guofu, QIN Shengfeng, et al. Integrated Geometric Error Modeling, Identification and Compensation of CNC Machine Tools[J]. International Journal of Machine Tools and Manufacture, 2012, 52(1): 24-29. |
| [11] | 杨建军, 司林林, 林守金, 等. 齿轮加工机床几何误差补偿研究综述[J]. 机床与液压, 2024, 52(19): 174-187. |
| YANG Jianjun, SI Linlin, LIN Shoujin, et al. Review on Geometric Error Compensation of Gear Processing Machine Tools[J].Machine Tool & Hydraulics,2024,52(19): 174-187. | |
| [12] | 范晋伟, 秦池, 潘日. 基于数控指令修正的数控内圆磨床几何误差补偿[J]. 机床与液压, 2022, 50(21): 157-162. |
| FAN Jinwei, QIN Chi, PAN Ri. Geometric Error Compensation of CNC Internal Grinder Machine Based on CNC Command Correction[J]. Machine Tool & Hydraulics, 2022, 50(21): 157-162. | |
| [13] | 李忠群, 刘鸿, 刘强, 等. 四轴联动机床几何误差建模分析与评估[J]. 机床与液压, 2024, 52(23): 175-180. |
| LI Zhongqun, LIU Hong, LIU Qiang, et al. Analysis and Evaluation of Geometric Error Modeling for Four-axis Linkage Machine Tools[J]. Machine Tool & Hydraulics, 2024, 52(23): 175-180. | |
| [14] | 王明海, 张威, 刘香辰. 基于位姿变化的钻铆机器人刚度优化[J]. 机床与液压, 2024, 52(3): 49-54. |
| WANG Minghai, ZHANG Wei, LIU Xiangchen. Drilling Riveting Robot Stiffness Optimization Based on Pose Change[J]. Machine Tool & Hydraulics, 2024, 52(3): 49-54. | |
| [15] | 陆历历, 郭旭红, 吉文正. TH6920滑枕挠曲变形的耦合补偿[J]. 机械设计与制造, 2019(1): 261-263. |
| LU Lili, GUO Xuhong, JI Wenzheng. Coupling Compensation of the Ram Flexure Deformation for TH6920[J]. Machinery Design & Manufacture, 2019(1): 261-263. | |
| [16] | ZHU Weidong, MEI Biao, KE Yinglin. Kinematic Modeling and Parameter Identification of a New Circumferential Drilling Machine for Aircraft Assembly[J]. The International Journal of Advanced Manufacturing Technology, 2014, 72(5): 1143-1158. |
| [17] | ZHAO Dan, BI Yunbo, KE Yinglin. Kinematic Modeling and Base Frame Calibration of a Dual-machine-based Drilling and Riveting System for Aircraft Panel Assembly[J]. The International Journal of Advanced Manufacturing Technology, 2018, 94(5): 1873-1884. |
| [1] | LI Guolong, ZHAO Xiaoliang, WANG Yu, TAO Yijie. Operation Modal Analysis Method of Gear Grinding Machine Spindle Operations under Complex Working Conditions [J]. China Mechanical Engineering, 2026, 37(1): 51-59. |
| [2] | YANG Mingxing, SHEN Jiale, GAO Peng, ZHANG Xing, WANG Junxiang. Design of Continuum Robots and Compensation Strategies for Losses of Guide Paths [J]. China Mechanical Engineering, 2025, 36(12): 2820-2828. |
| [3] | GAO Guanbin1, 2, ZHAO Siguo1, 2, LI Yingjie1, 2. Modeling and Identification of Robot End-payloads Based on Joint Torque Balance [J]. China Mechanical Engineering, 2025, 36(06): 1188-1197. |
| [4] | LIU Yi, YI Wangmin, YAO Jiantao, WANG Xingda, YU Peng, ZHAO Yongshen. Design and Research of Heavy-duty Posture-adjusting Assembly Robots in Narrow Space [J]. China Mechanical Engineering, 2024, 35(02): 324-336. |
| [5] | DU Kai, REN Yanqiang, HOU Yong, LI Xiaoqiang, CHEN Shuaifeng, SUN Liang, ZUO Xiaojiao, YUAN Xiaoguang. Parameter Identification Strategy of Yield Criterion for Accurately Predicting Anisotropic Behaviors under Near Plane Strain Loading [J]. China Mechanical Engineering, 2023, 34(19): 2381-2393. |
| [6] | DUAN Linchao, ZHANG Xugang, ZHANG Hua, SONG Huawei, AO Xiuyi. SOC Estimation of Lithium-ion Batterys Based on Second-order Approximation Extended Kalman Filter [J]. China Mechanical Engineering, 2023, 34(15): 1797-1804. |
| [7] | WU Jianwei, SUN Beibei, JIANG Qiubo, CHEN Lin. Parameter Identification of Nonlinear Hydro-pneumatic Suspensions Based on Feature Extraction in Time-frequency Domain [J]. China Mechanical Engineering, 2023, 34(11): 1296-1305. |
| [8] | XIA Junyong, LIU Kejin, ZHONG Fei, SUN Ying. Structural Parameter Identification for Articulated Arm Coordinate Measuring Machines Using Modified Teaching-learning-based Optimization Optimized by Simulated Annealing Algorithm [J]. China Mechanical Engineering, 2023, 34(03): 314-323. |
| [9] | GAO Wenbin, HUANG Qi, YU Xiaoliu, . Research on Geometric Error Analysis and Parameter Identification of Modular Robots [J]. China Mechanical Engineering, 2022, 33(07): 811-817,851. |
| [10] | LI Famin, ZHENG Tianjiang, SHEN Wenjun, WANG Huixiao, FANG Zaojun, LIANG Dongtai. Calibration Method for Cable-driven Continuum Robots [J]. China Mechanical Engineering, 2022, 33(02): 202-208. |
| [11] | XIE Shenglong1;LI Tiefeng2;WANG Binrui1;CHEN Dijian1. Hysteresis Modeling Method of Pneumatic Muscles Based on KP Model [J]. China Mechanical Engineering, 2020, 31(10): 1183-1189. |
| [12] | JIN Long;CHEN Yueping;GE Dongyuan. Spatial Statistical Analysis of Geometric Deviations of Free-form Surfaces [J]. China Mechanical Engineering, 2020, 31(04): 445-450. |
| [13] | LI Yongquan1,2;WU Pengtao1,2;ZHANG Yang1,2 ;ZHANG Lijie2,3. Dynamics Parameter Identification and Control of a Spherical 2-DOF Redundant Driven Parallel Robot System [J]. China Mechanical Engineering, 2019, 30(16): 1967-1975. |
| [14] | WEI Wei1,2;GENG Kuihua1,2;GENG Ainong3;WANG Shaowei1;LI Xinmo3. Frictional Force Test of Rotor Compressor Slides-chute Movement Deputy Based on LuGre Mode [J]. China Mechanical Engineering, 2019, 30(08): 932-938. |
| [15] | CUI Fangyuan;HUA Dengxin;LI Yan;KONG Lingfei;LI Pengyang. A Merged Binding Modeling Method for Contact Fields of Bolted Joints [J]. China Mechanical Engineering, 2018, 29(16): 1912-1920. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||