

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (12): 2885-2893.DOI: 10.3969/j.issn.1004-132X.2025.12.010
Previous Articles Next Articles
WANG Xuhao1( ), SHENG Wolong1, WU Mengli1(), XU Yilong1, ZHAO Xiaowei2,3, CAO Yiran1
), SHENG Wolong1, WU Mengli1(), XU Yilong1, ZHAO Xiaowei2,3, CAO Yiran1
Received:2024-11-13
Online:2025-12-25
Published:2025-12-31
Contact:
WU Mengli
王旭浩1(), 盛卧龙1, 吴孟丽1(), 许贻龙1, 赵晓巍2,3, 曹轶然1
通讯作者:
吴孟丽
作者简介:王旭浩,男,1989年生,博士,讲师。研究方向为机器人机构学和民航特种智能装备。E-mail:xh_wang@cauc.edu.cn。
基金资助:CLC Number:
WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators[J]. China Mechanical Engineering, 2025, 36(12): 2885-2893.
王旭浩, 盛卧龙, 吴孟丽, 许贻龙, 赵晓巍, 曹轶然. 可伸缩蛇形臂机器人的设计及运动学建模[J]. 中国机械工程, 2025, 36(12): 2885-2893.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.12.010
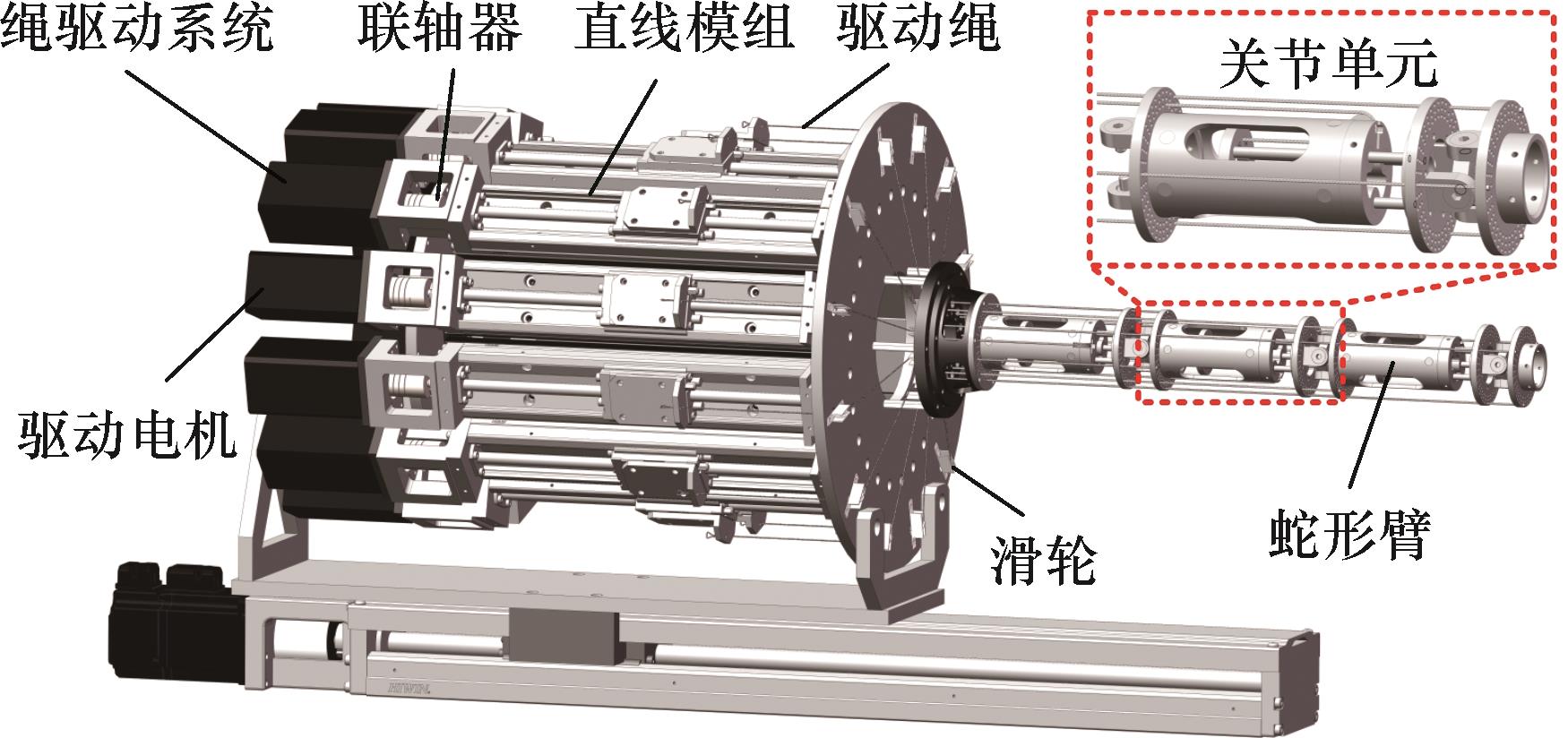
Fig.1 Model of the extensible snake-like manipulator
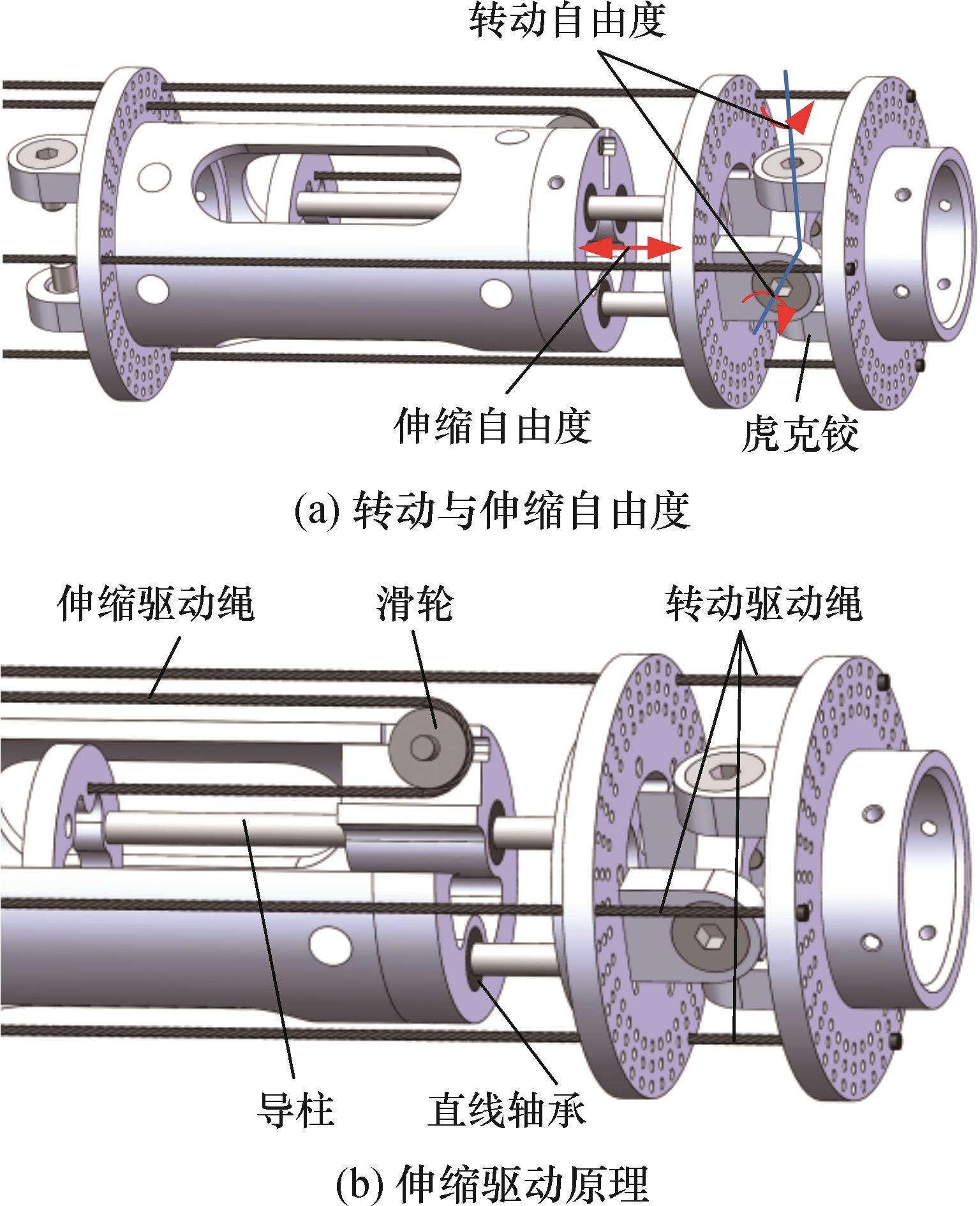
Fig.2 Model of the extensible joint unit
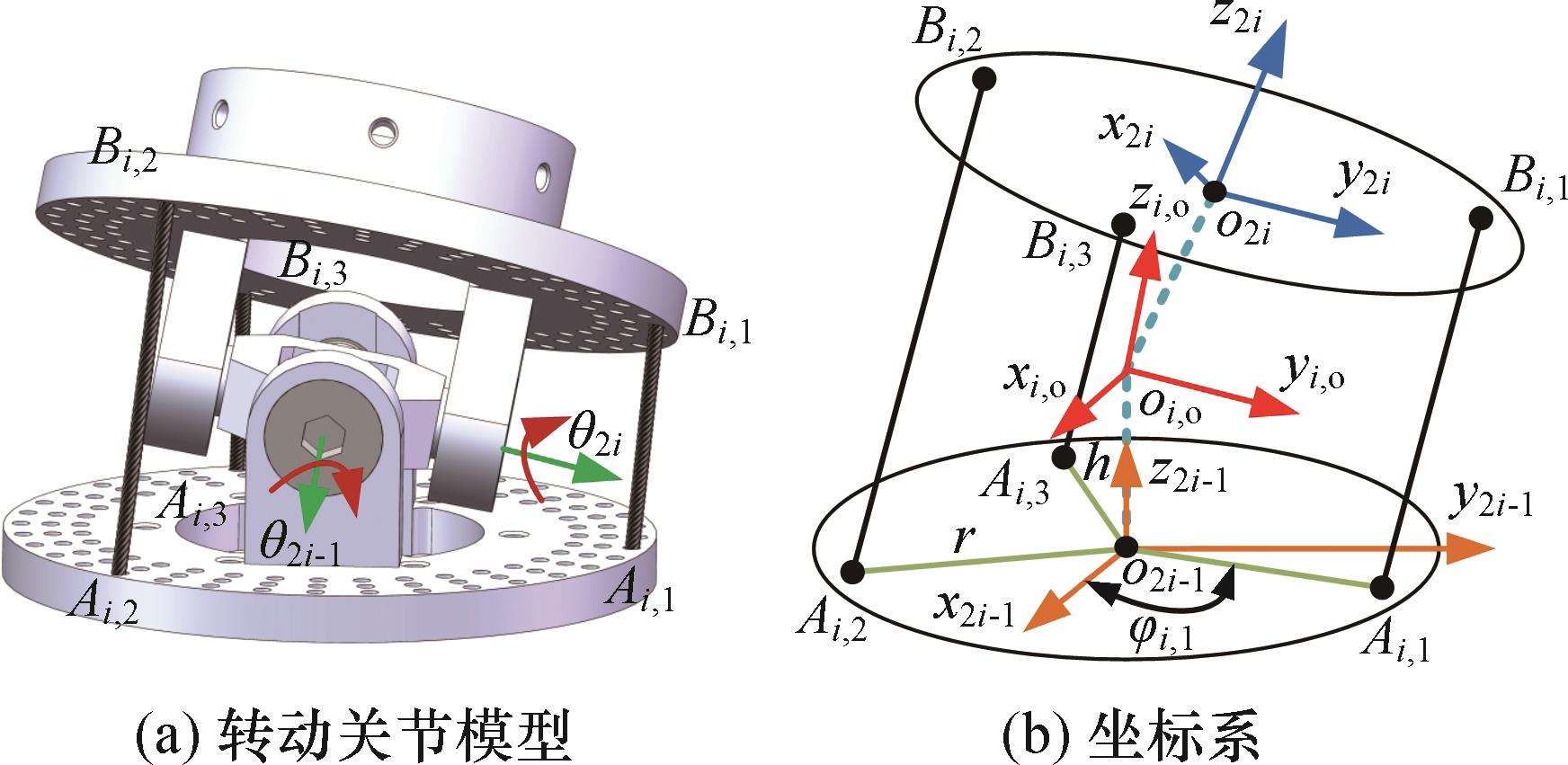
Fig.3 Model of revolute DOFs in the joint unit
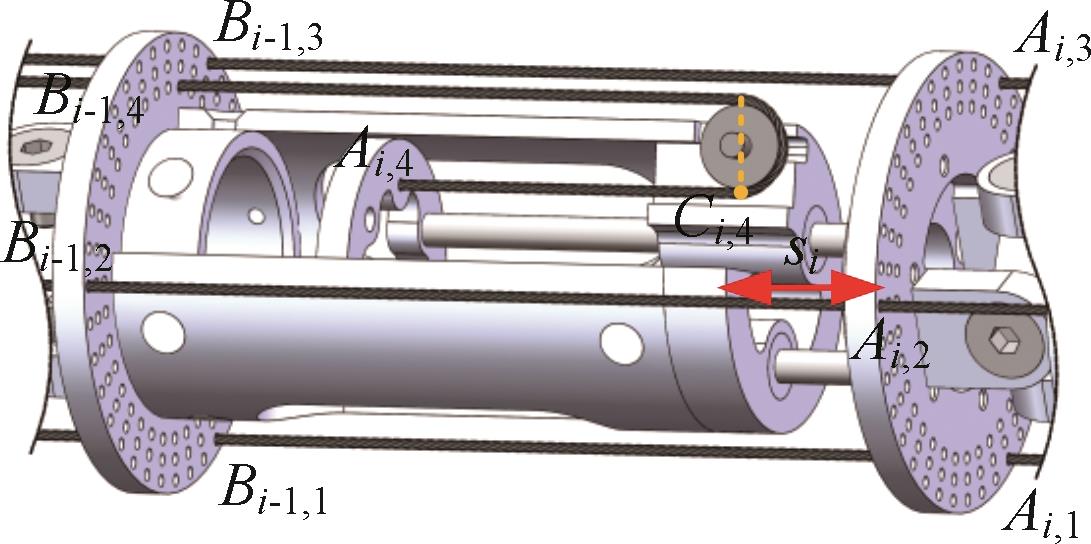
Fig.4 Model of extensible DOF in the joint unit
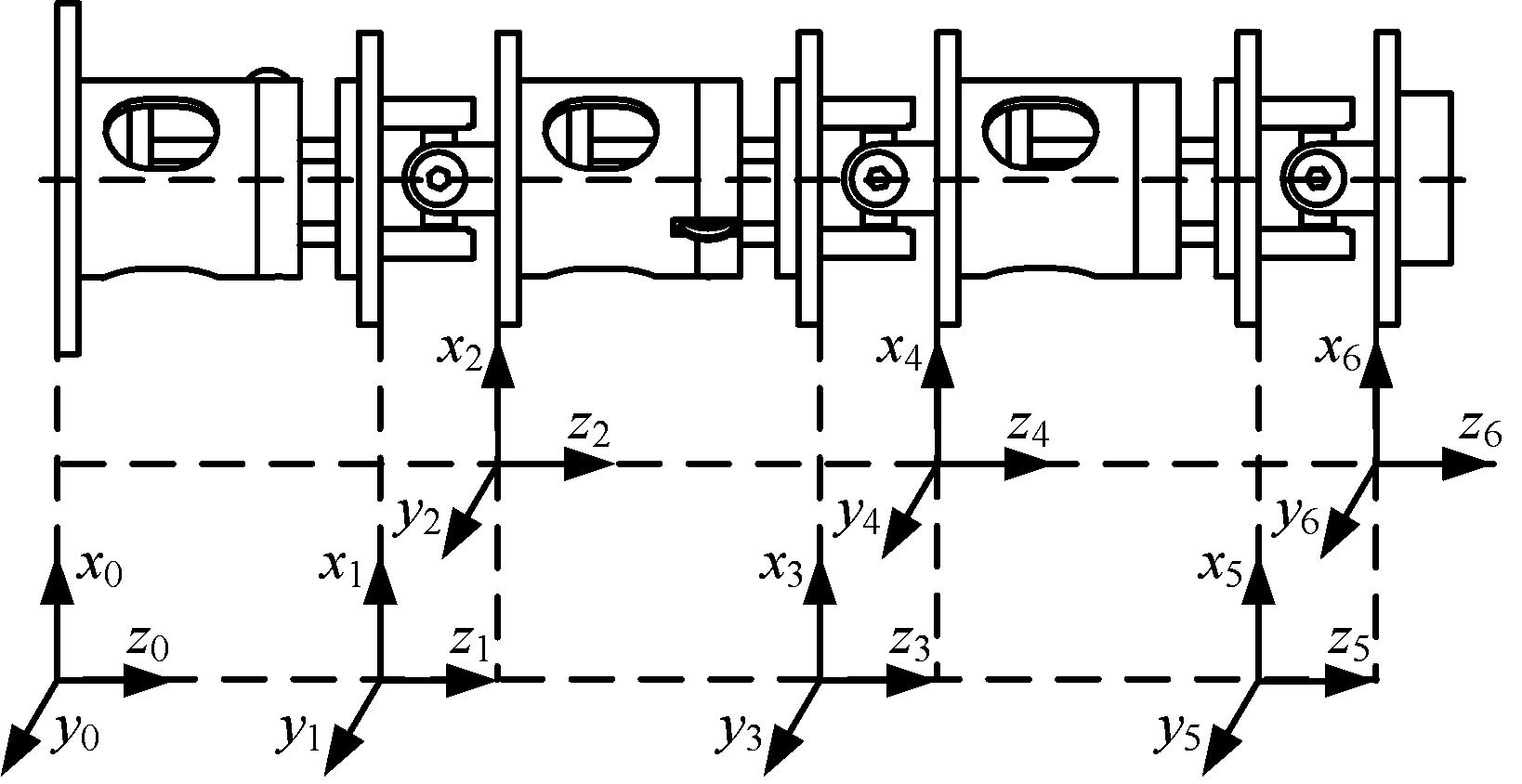
Fig.5 Joint coordinate systems

Fig.6 Flow chart of integrated inverse kinematics algorithm
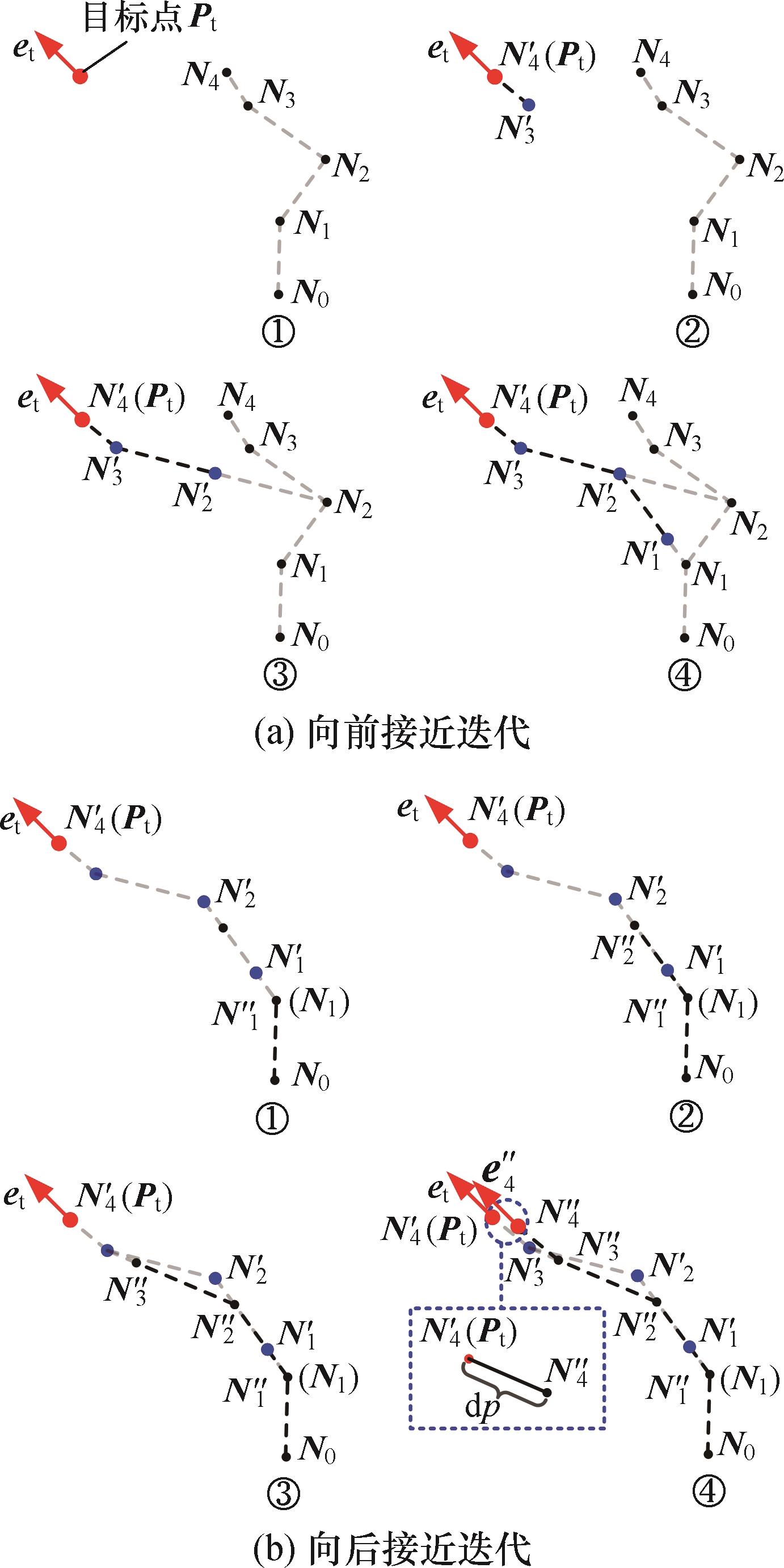
Fig.7 Iteration of FABRIK algorithm
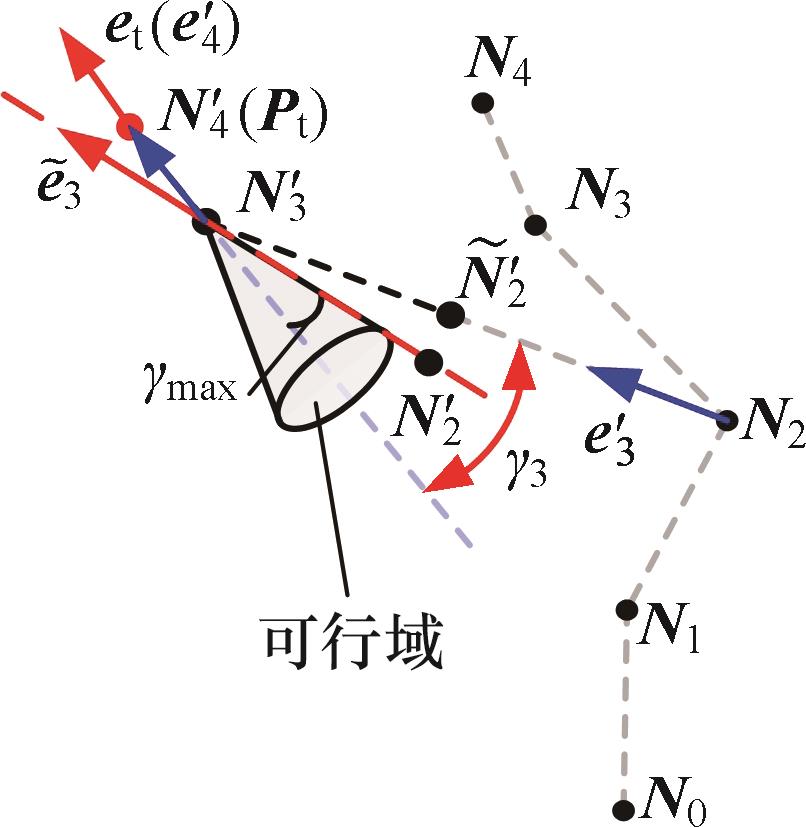
Fig.8 Joint limit avoidance in forward reaching iteration
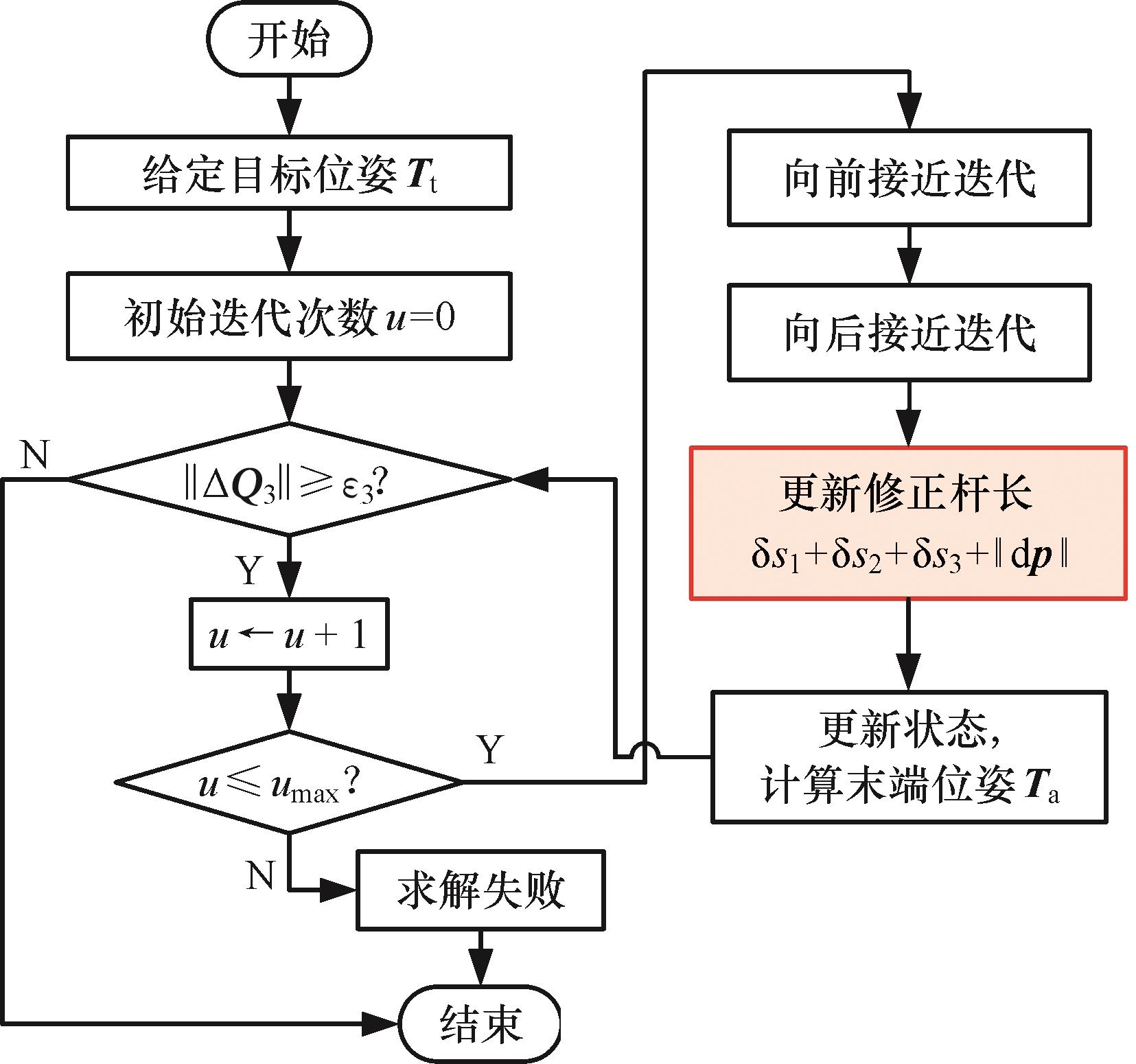
Fig.9 Flow chart of the modified FABRIK algorithm
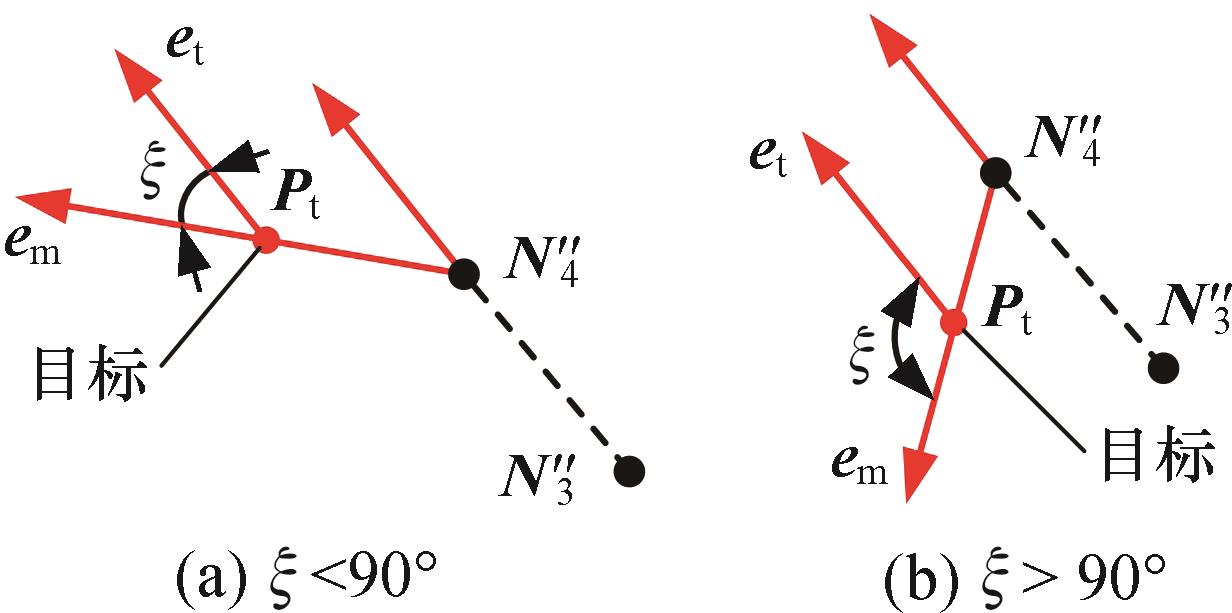
Fig.10 Link length compensation direction
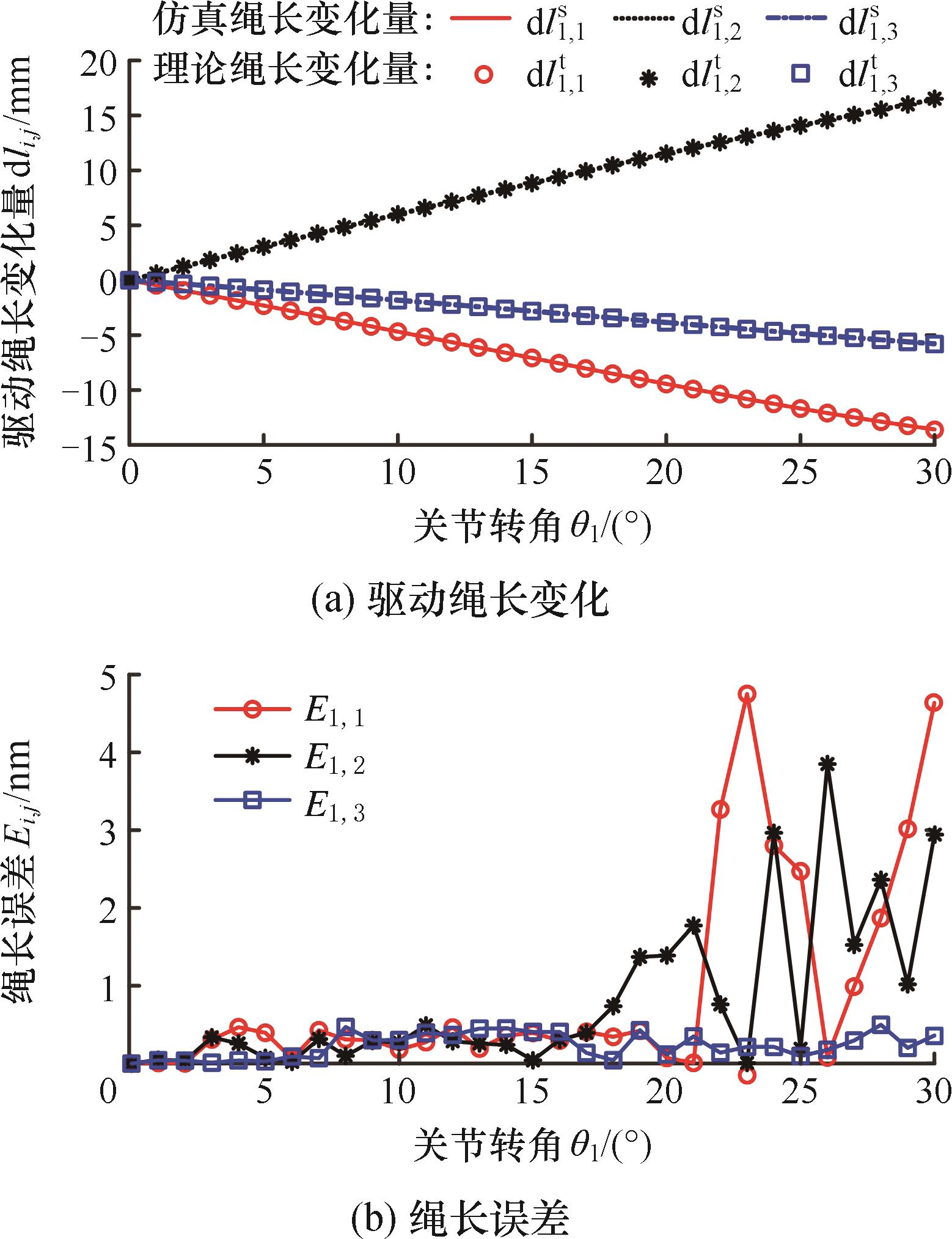
Fig.11 Relation cable length errors
| 算法 | 初始解 q0 | 初始解误差 | 计算 时间 t/ms | |
|---|---|---|---|---|
位置误差 dp/mm | 姿态误差 dr/(˚) | |||
基于雅可比 矩阵的迭代法 | (0,0°,0°,0,0°, 0°,0,0°,0°)T | 147.8670 | 0.8689 | 86 |
| 组合算法 | (9.13 mm,12.91°, 22.86°,9.13 mm, 3.30°,5.58°, 9.13 mm,22.77°, 17.92°)T | 6.1303 | 0.0361 | 10.6 |
改进的 FABRIK算法 | — | — | — | 1.7 |
Tab.1 Computational efficiency of inverse kinematics
| 算法 | 初始解 q0 | 初始解误差 | 计算 时间 t/ms | |
|---|---|---|---|---|
位置误差 dp/mm | 姿态误差 dr/(˚) | |||
基于雅可比 矩阵的迭代法 | (0,0°,0°,0,0°, 0°,0,0°,0°)T | 147.8670 | 0.8689 | 86 |
| 组合算法 | (9.13 mm,12.91°, 22.86°,9.13 mm, 3.30°,5.58°, 9.13 mm,22.77°, 17.92°)T | 6.1303 | 0.0361 | 10.6 |
改进的 FABRIK算法 | — | — | — | 1.7 |
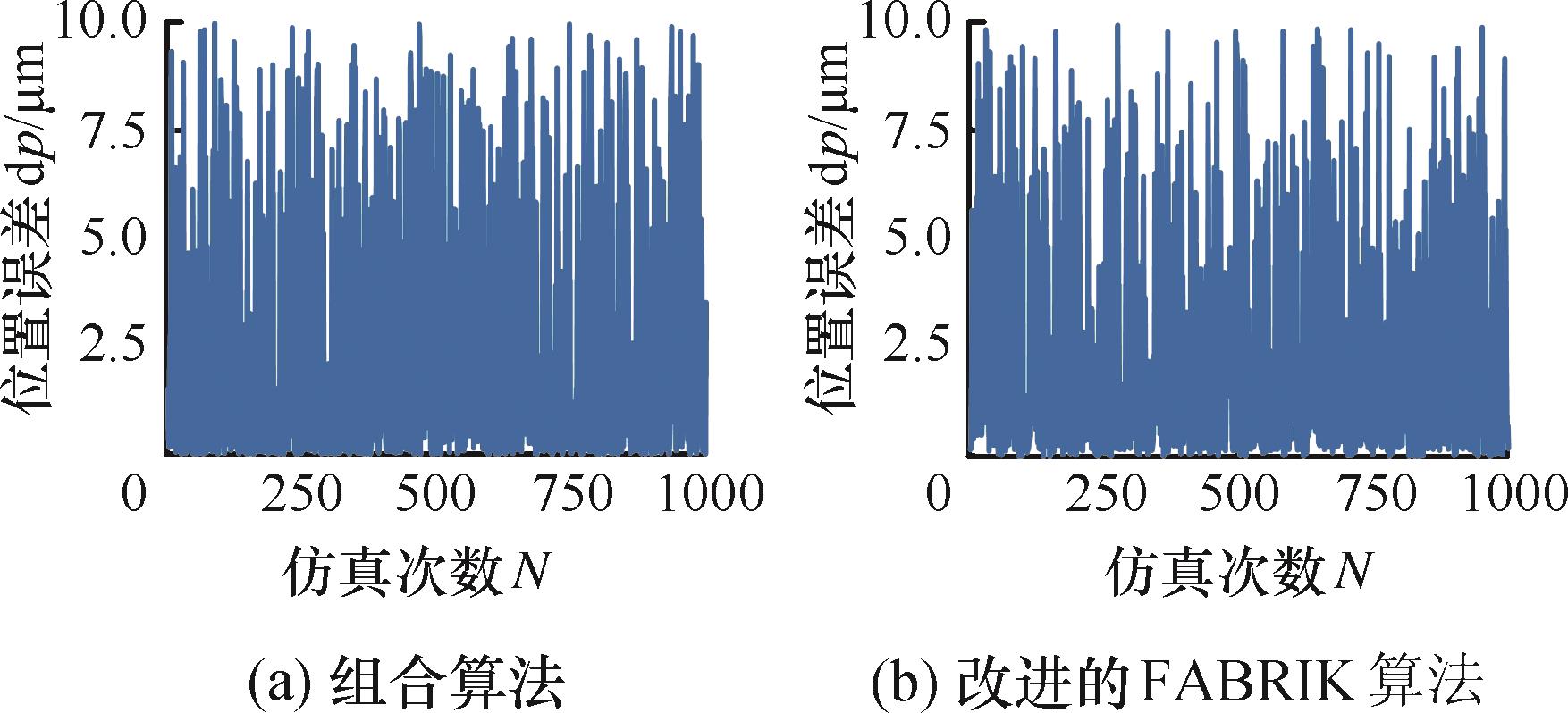
Fig.12 Comparison of the position errors
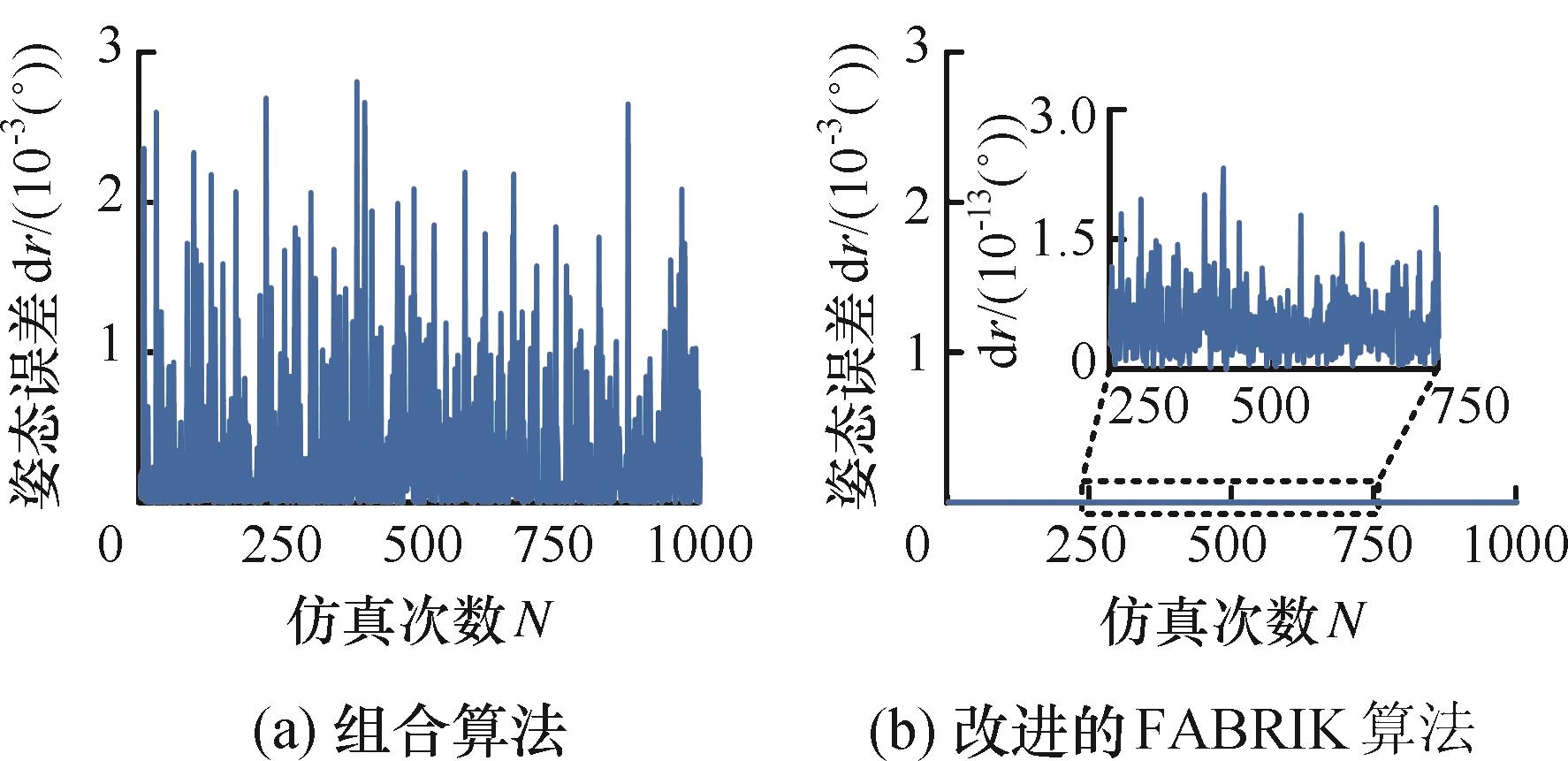
Fig.13 Comparison of the orientation errors
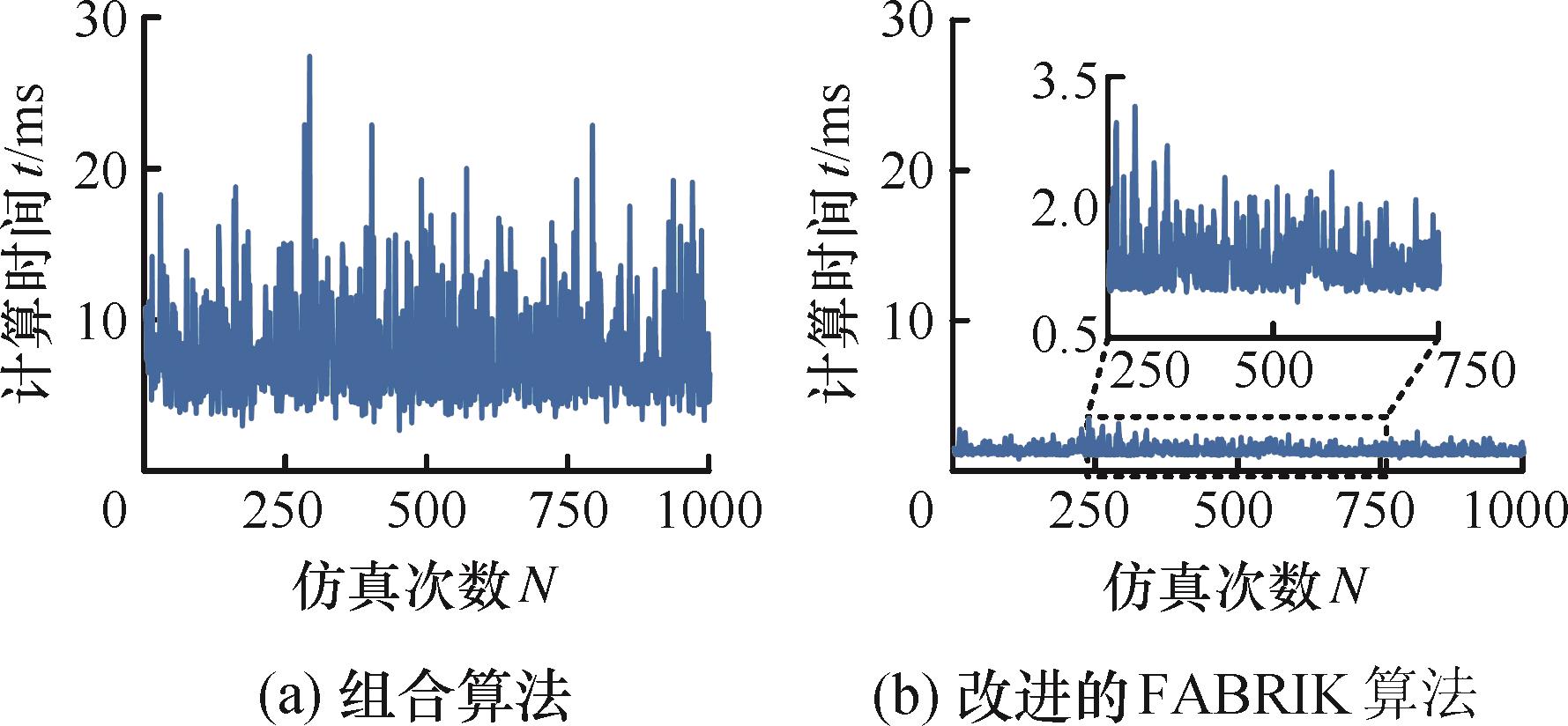
Fig.14 Comparison of the operation times
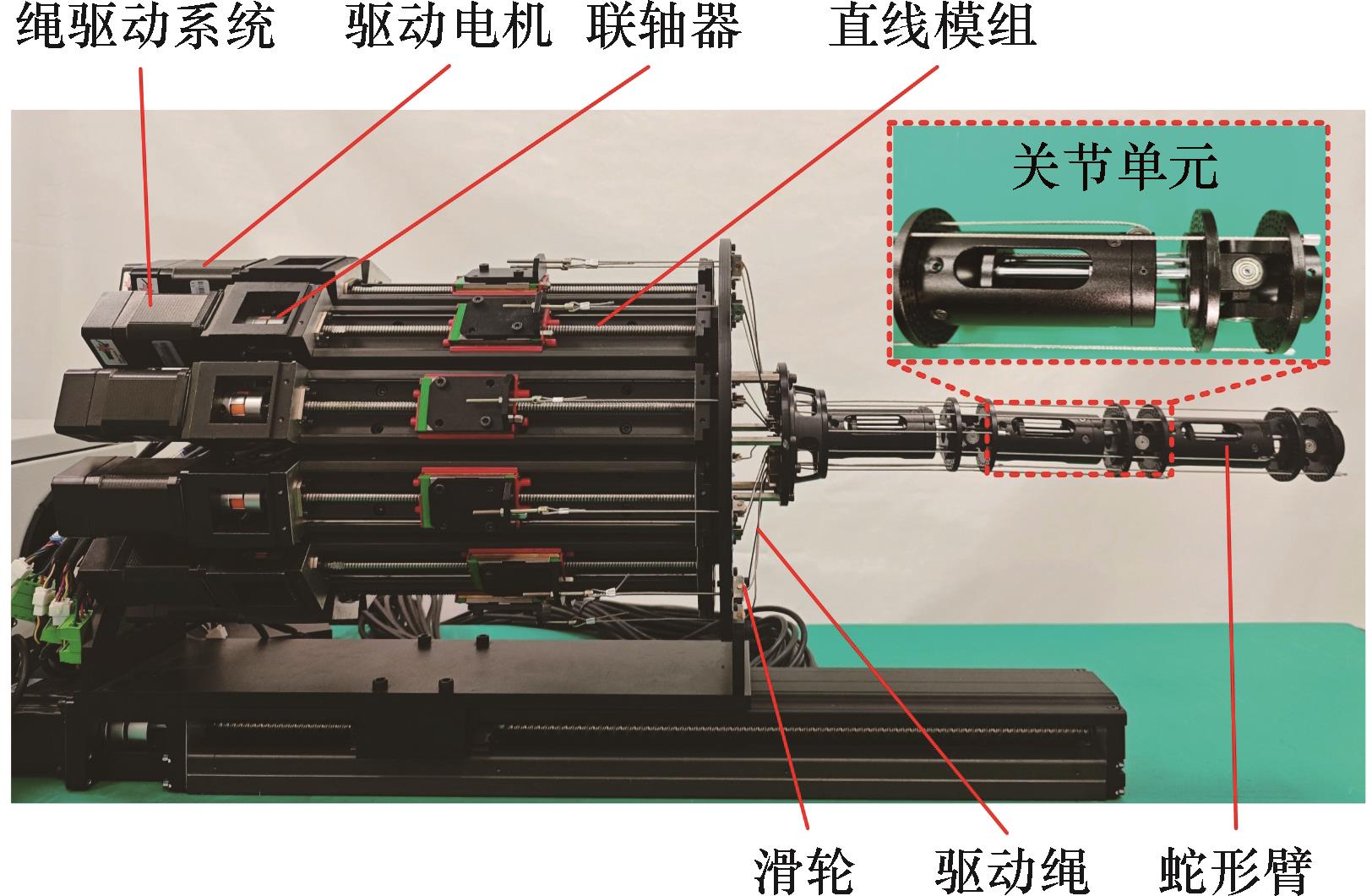
Fig.15 Prototype of the snake-like manipulator
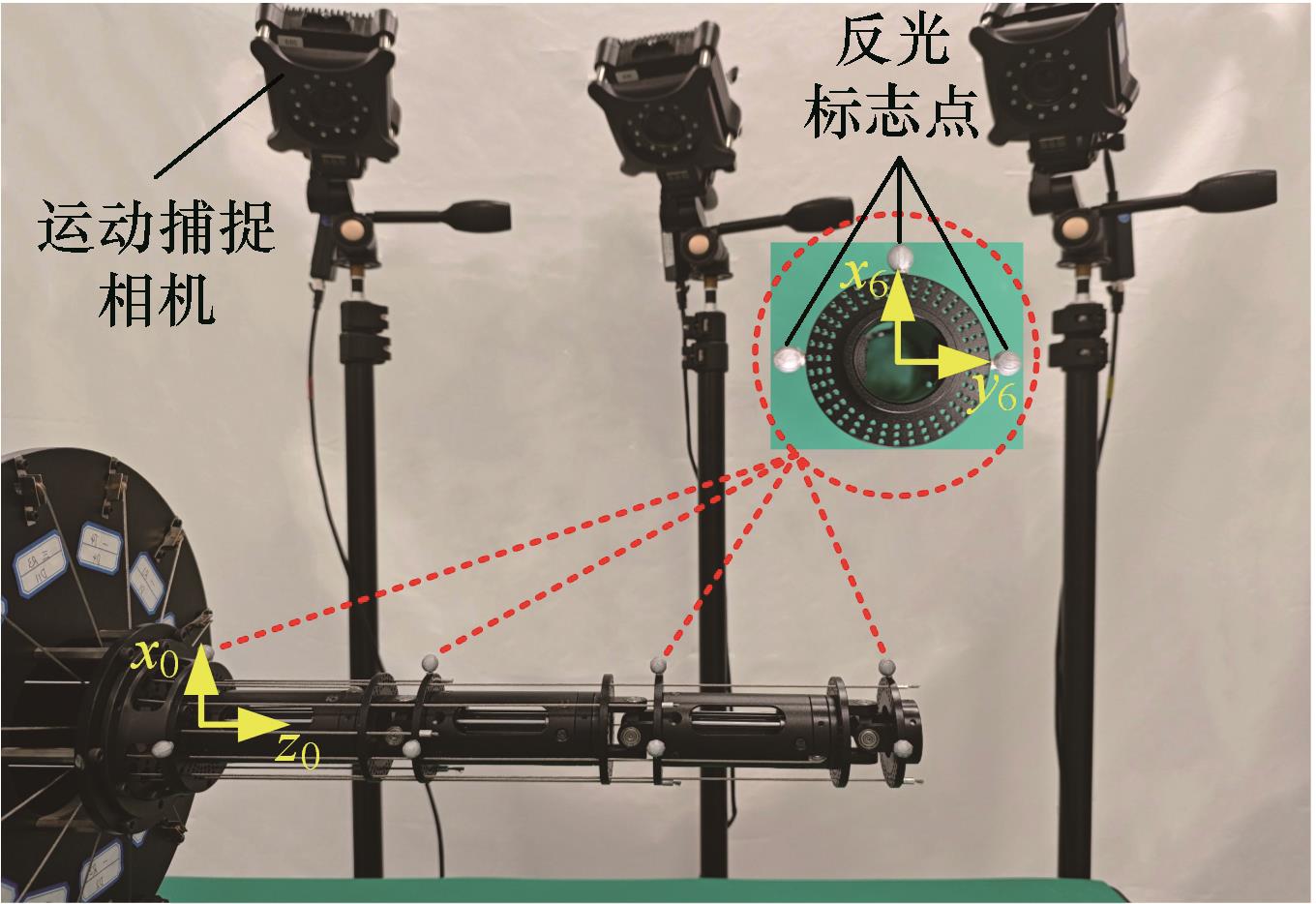
Fig.16 Measurement scheme based on motion capture system
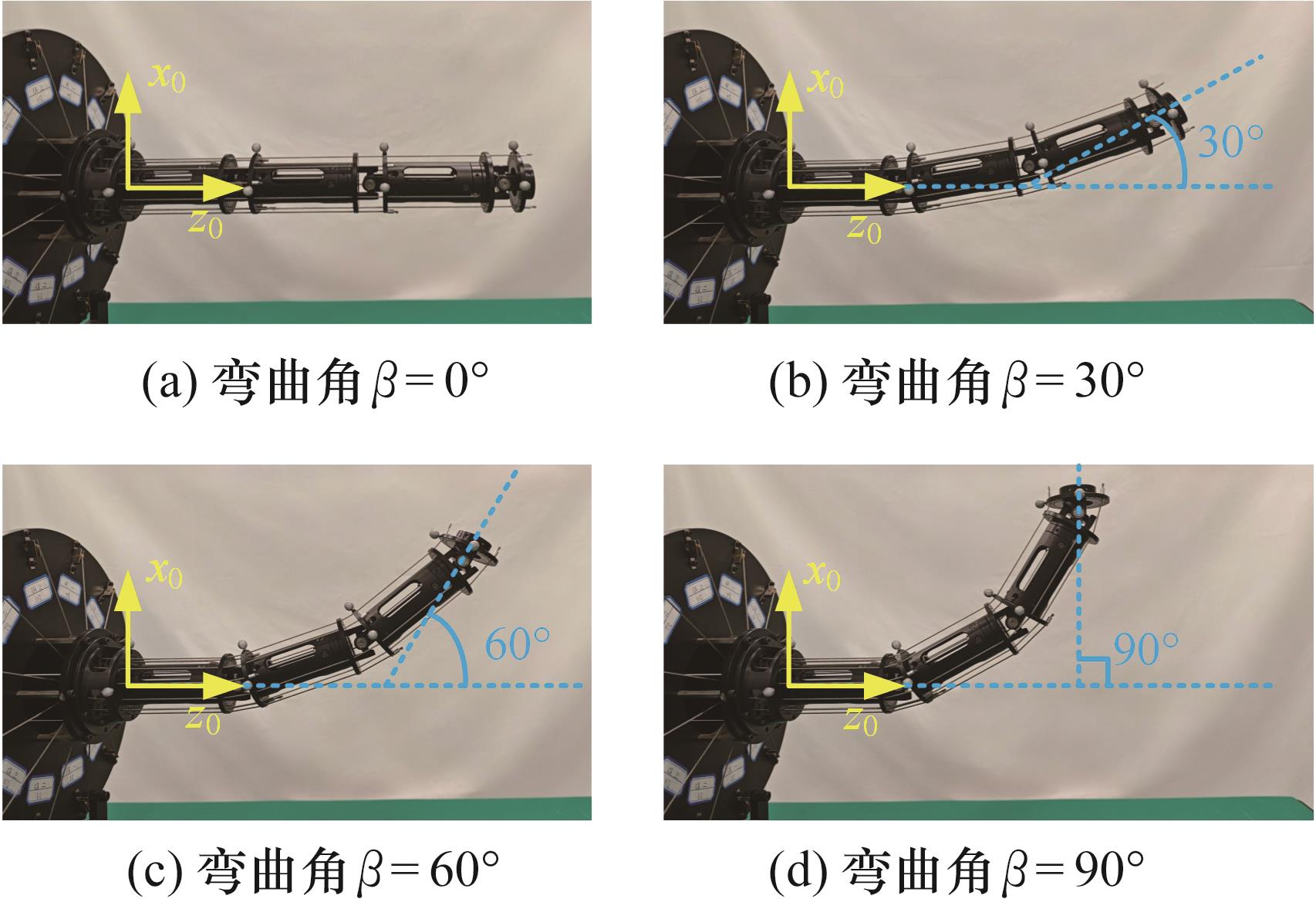
Fig.17 Plane bending experiment
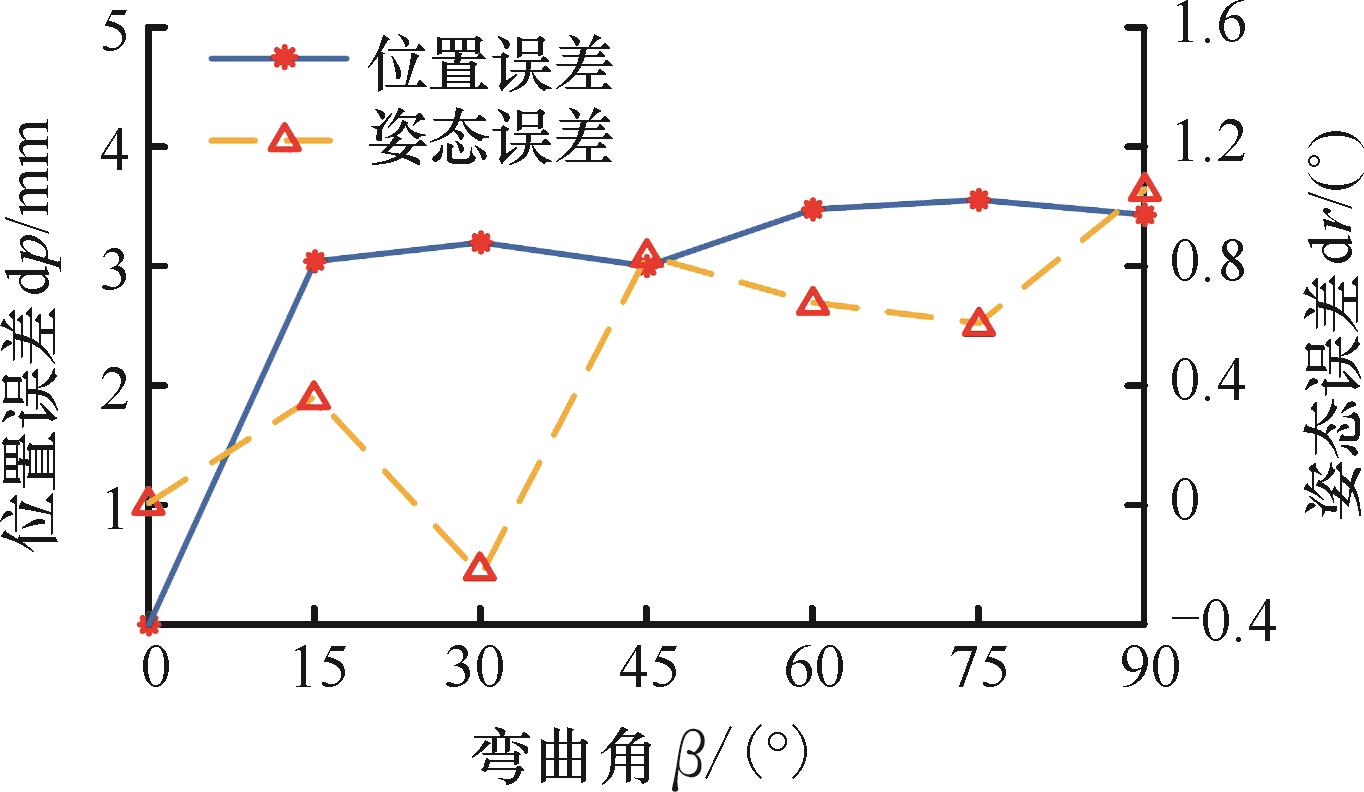
Fig.18 End position and orientation errors
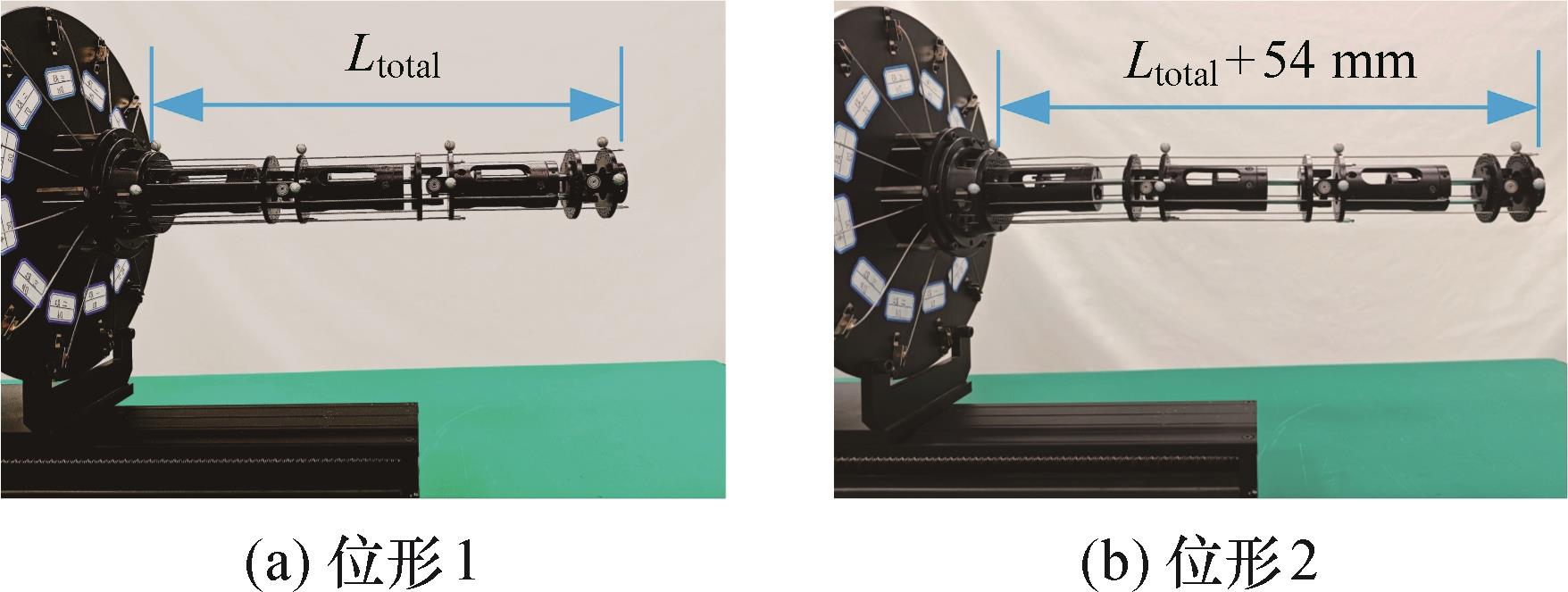
Fig.19 Extension of the snake-like manipulator
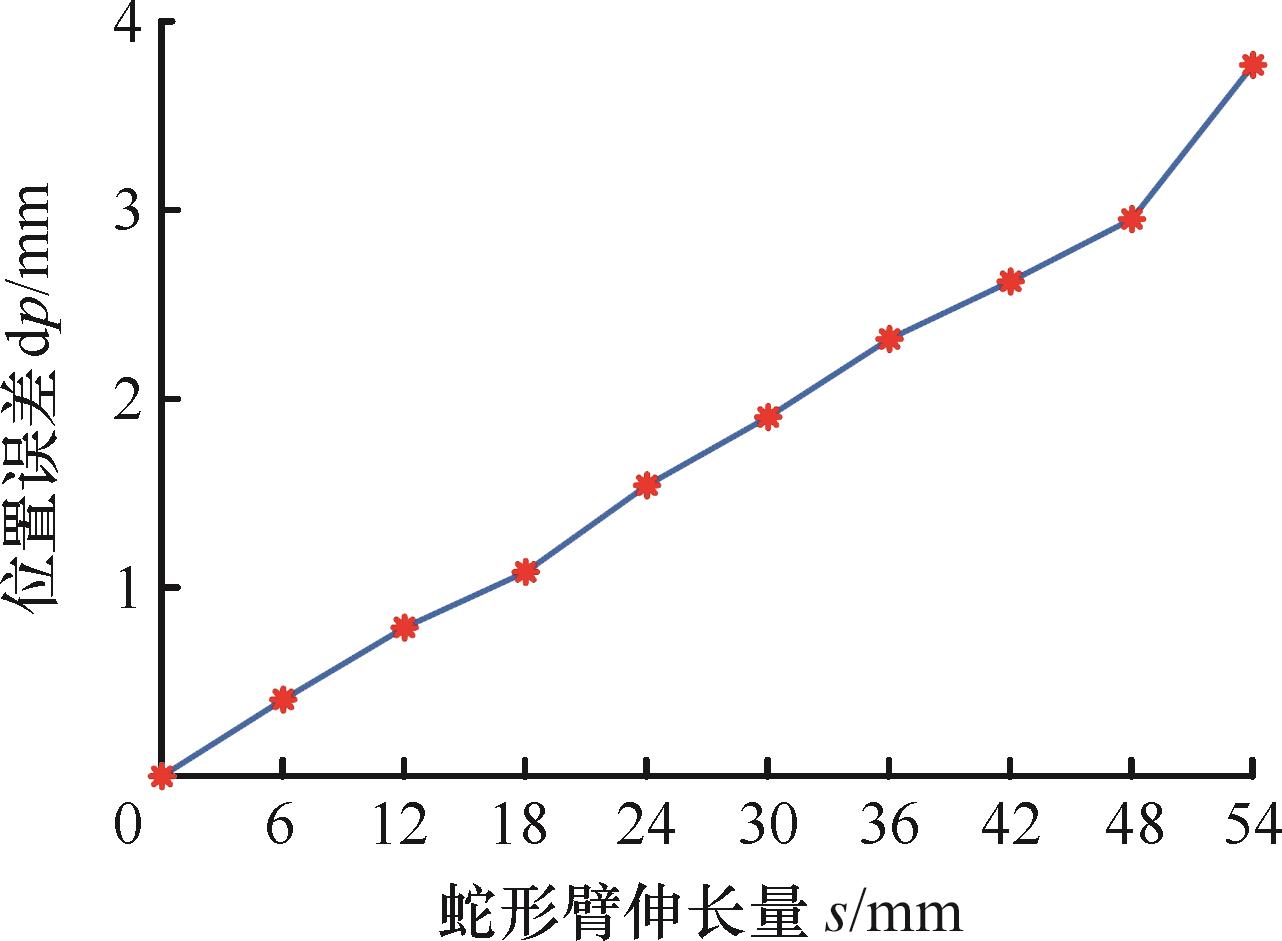
Fig.20 End position errors under extension experiment
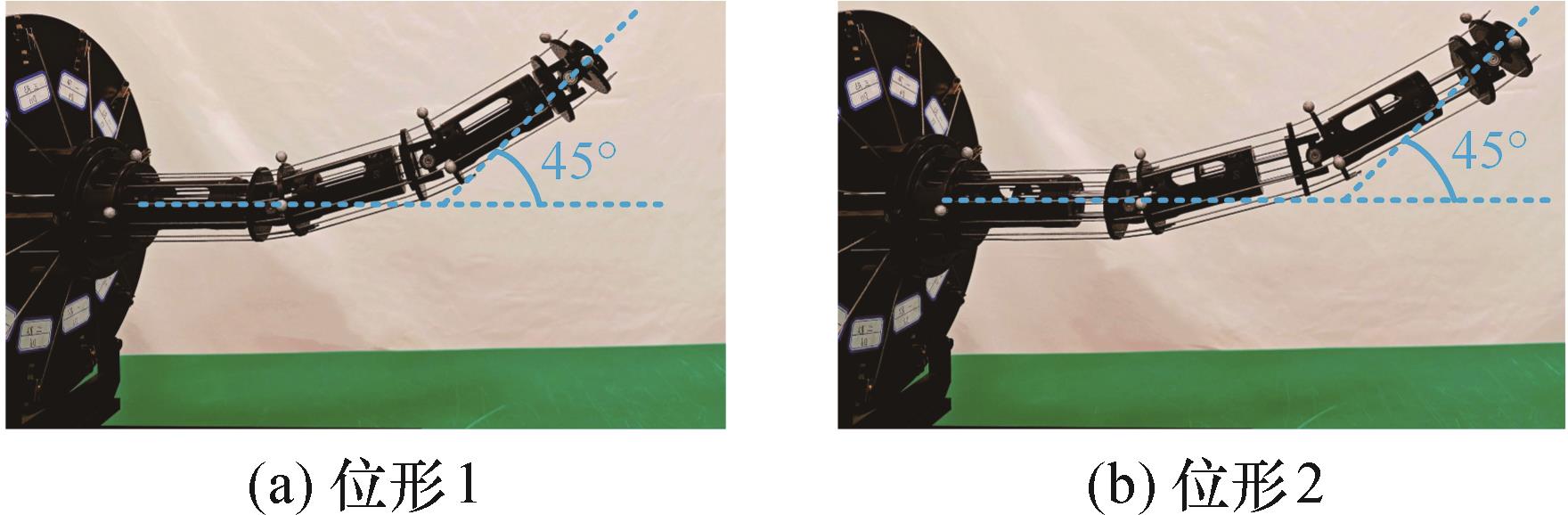
Fig.21 Bending and extension of snake-like manipulator
| [1] | RUSSO M, SADATI S M H, DONG Xin. Continuum Robots: an Overview[J]. Advanced Intelligent Systems, 2023, 5(5):2200367. |
| [2] | WANG Fengxu, DONG Haodai, YAN Lei, et al. Development of a Linear Decoupling Cable-driven Manipulator with Independent Driving Joints[J]. Mechatronics, 2024, 100:103192. |
| [3] | 潘琪琪, 罗静静, 王富豪, 等. 切口式单孔腹腔镜连续体手术机器人构型设计和优化[J]. 机械工程学报, 2023, 59(23):55-67. |
| PAN Qiqi, LUO Jingjing, WANG Hongbo, et al. Design and Optimization of Continuum Robot Configuration for Single-port Laparoscopic Surgery[J]. Journal of Mechanical Engineering, 2023, 59(23):55-67. | |
| [4] | 李法民, 郑天江, 沈雯钧, 等. 绳驱动连续体机器人标定方法[J]. 中国机械工程, 2022, 33(2):202-208. |
| LI Famin, ZHENG Tianjiang, SHEN Wenjun, et al. Calibration Method for Cable-driven Continuum Robots[J]. China Mechanical Engineering, 2022, 33(2):202-208. | |
| [5] | 吉爱红, 刘荣兴, 陈辉, 等. 多关节连续体机器人的运动分析与遥操作技术[J]. 中国机械工程, 2021, 32(23):2883-2889. |
| JI Aihong, LIU Rongxing, CHEN Hui, et al. Kinematics Analysis and Teleoperation Technology of Multi-joint Continuum Robots[J]. China Mechanical Engineering, 2021, 32(23):2883-2889. | |
| [6] | ZHENG Yang, WU Baibo, CHEN Yuyang, et al. Design and Validation of Cable-driven Hyper-redundant Manipulator with a Closed-loop Puller-follower Controller[J]. Mechatronics, 2021, 78:102605. |
| [7] | LI Junxiang, XU Wenfu, LI Wenshuo, et al. Design and Development of Composite Linkage Mechanism for Cable-driven Segmented Manipulator to Increase Synchronous Accuracy and Transmission Distance[J]. IEEE Robotics and Automation Letters, 2023, 9(1):25-32. |
| [8] | 齐飞, 张恒, 裴海珊, 等. 基于力传递模型的连续体机器人驱动误差补偿研究[J]. 农业机械学报, 2023, 54(1):402-411. |
| QI Fei, ZHANG Heng, PEI Haishan, et al. Drive Error Compensation of Continuum Manipulator Based on Force Transfer Model[J]. Transactions of the Chinese Society of Agricultural Machinery, 2023, 54(1):402-411. | |
| [9] | YANG Taiwei, JIAN Huang, XU Wenfu, et al. Development of a Cable-driven Redundant Space Manipulator with Large Bending Angle by Combining Quaternion Joints and Segmented Coupled Linkages Mechanism[J]. Chinese Journal of Aeronautics, 2023, 36(11):483-499. |
| [10] | LIU Tong, WANG Xiaojie. Modeling and Analysis of Oblique-chamber and Symmetric Oblique-chamber Pneu-net Soft Actuators[J]. IEEE Robotics and Automation Letters, 2024, 9(10):8682-8689. |
| [11] | HONG Wuzhou, FENG Fan, XIE Lei, et al. A Two-segment Continuum Robot with Piecewise Stiffness for Maxillary Sinus Surgery and Its Decoupling Method[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6):4440-4450. |
| [12] | WANG Mingfeng, DONG Xin, BA Weiming, et al. Design, Modelling and Validation of a Novel Extra Slender Continuum Robot for In-situ Inspection and Repair in Aeroengine[J]. Robotics and Computer-Integrated Manufacturing, 2021, 67:102054. |
| [13] | 雷飞, 刘思宇, 廖峻北,等. 大负载作用下绳驱连续型机器人静力学建模分析[J]. 机械工程学报, 2024, 60(15):28-37. |
| LEI Fei, LIU Siyu, LIAO Junbei, et al. Static Modeling and Analysis of Cable-driven Continuum Robots under Large Load[J]. Journal of Mechanical Engineering, 2024, 60(15):28-37. | |
| [14] | XU Dawei, LI En, LIANG Zize. Kinematics and Statics Analysis of a Novel Cable-driven Snake Arm Robot[C]∥2017 Chinese Automation Congress (CAC). Jinan, 2017:439-444. |
| [15] | ZHUANG Zheming, ZHANG Ze, GUAN Yuntao, et al. Design and Control of SLPM-based Extensible Continuum Arm[J]. Journal of Mechanisms and Robotics, 2022, 14(6):061003. |
| [16] | WANG Pengyuan, DENG Binchen, HE Zongbo, et al. Extensible Continuum Manipulator Toward In-situ Explosive Ordnance Disposal[J]. Journal of Mechanisms and Robotics, 2023, 15(5):051013. |
| [17] | MAVINKURVE U, KANADA A, TAFRISHI S A, et al. Geared Rod-driven Continuum Robot with Woodpecker-inspired Extension Mechanism and IMU-based Force Sensing[J]. IEEE Robotics and Automation Letters, 2023, 9(1):135-142. |
| [18] | WANG Xuhao, WANG Chengfa, WU Mengli, et al. Design and Kinematics of a Novel Continuum Robot Connected by Unique Offset Cross Revolute Joints[J]. Journal of Mechanisms and Robotics, 2024, 16:121003-1. |
| [19] | WANG Xuhao, ZHANG Dawei, ZHAO Chen. The Inverse Kinematics of a 7R 6-degree-of-freedom Robot with Non-spherical Wrist[J]. Advances in Mechanical Engineering, 2017, 9(8):1-11. |
| [20] | MU Zonggao, YUAN Han, XU Wenfu, et al. A Segmented Geometry Method for Kinematics and Configuration Planning of Spatial Hyper-redundant Manipulators[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, 50(5):1746-1756. |
| [21] | 万俊, 姚佳烽, 余亮, 等. 基于伪距离的冗余机器人避障算法[J]. 机械工程学报, 2020, 56(17):59-70. |
| WAN Jun, YAO Jiafeng, YU Liang, et al. Obstacle Avoidance Algorithm for Redundant Manipulators Based on Pseudo-distance Method [J]. Journal of Mechanical Engineering, 2020, 56(17):59-70. | |
| [22] | NIU Pingan, HAN Liang, HUANG Yunzhi, et al. Shape-controllable Inverse Kinematics of Hyper-redundant Robots Based on the Improved FABRIK Method[J]. Robotica, 2024, 42(1):225-241. |
| [1] | YIN Feng, HUANG Xin, ZHOU Jiayi. High-precision Computation of Inverse Kinematics for Redundant Robots Based on Flow Model [J]. China Mechanical Engineering, 2025, 36(12): 2960-2967. |
| [2] | Jiaxiang DONG, Quanquan LIU, Xiping HU, Xuezhi ZHAO. Kinematic Modeling of a Novel Rigid⁃Flexible Hybrid Continuum Robots [J]. China Mechanical Engineering, 2025, 36(11): 2678-2684. |
| [3] | Xinyao TANG, Rong YIN, Xupeng WANG, Jiayin YANG, Xiaoyi LIU, Yuyang HAO. Design and Optimization of Human-machine Compatibility of Knee-ankle Exoskeletons [J]. China Mechanical Engineering, 2025, 36(10): 2369-2378. |
| [4] | ZHAO Lijuan1, 2, BAI Zhongjian1, XIE Bo3, LIN Guocong1, WANG Tianxiang1, GAO Feng3, LIU Zifeng3. Study of Mechanical Characteristics of Soft Electrical Cables in Mining Machines [J]. China Mechanical Engineering, 2025, 36(02): 359-368. |
| [5] | WANG Zhiqiang1, HAN Jianhai1, 2, 3, LI Xiangpan1, 2, GUO Bingjing1, 2, DU Ganqin4. Cartesian Space Screw Linear Interpolation Trajectory Planning for Redundant Robots [J]. China Mechanical Engineering, 2025, 36(01): 104-112. |
| [6] | CHEN Zhuofan, ZHOU Kun, QIN Feifei, WANG Binrui. Inverse Kinematics Solution of Robots Based on IQPSO Algorithm [J]. China Mechanical Engineering, 2024, 35(02): 293-304. |
| [7] | ZHU Yulong, ZHAO Yingsong, FANG Yang, CHEN Hongen, CHEN Zhenmao, . Rotating Eddy Current Testing for Inspection of Cracks at Hole Edge [J]. China Mechanical Engineering, 2023, 34(08): 883-891. |
| [8] | LIU Xuemei, FENG Yan, YANG Zhen, LI Aiping, LU Junguo. IAFSA for Solving Inverse Kinematics of Redundant Robotic Spraying System [J]. China Mechanical Engineering, 2022, 33(11): 1317-1323. |
| [9] | ZHANG Heng, DING Xiaohong, SHEN Lei, XU Shipeng. Topology Optimization of Sandwich Damping Composite Structure with Connective Constraint [J]. China Mechanical Engineering, 2021, 32(20): 2403-2410. |
| [10] | LIU Xiuying, ZHANG Jianjun, LIU Chenglei, NIU Jianye, QI Kaicheng, GUO Shijie. Kinematic Parameter Optimization of Workspace-based Generalized Spherical Parallel Robots for Ankle Joint Rehabilitation [J]. China Mechanical Engineering, 2021, 32(16): 1921-1929. |
| [11] | ZHANG Yue, DONG Lei, HUAN Ronghua, HUANG Zhilong. Design and Kinematic Analysis of Crawler-type Pipeline Endoscope Robots for Wind Turbine Blades#br# [J]. China Mechanical Engineering, 2021, 32(15): 1884-1889. |
| [12] | JI Yangzhen, HOU Li, LUO Lan, LUO Pei, LIU Xubin, LIANG Shuang. Solution of Inverse Kinematics for 6R Robots Based on Combinatorial Optimization Algorithm#br# [J]. China Mechanical Engineering, 2021, 32(10): 1222-1232. |
| [13] | LIU Shiping;CAO Junfeng;SUN Tao;HU Jiangbo;FU Yan;ZHANG Shuai;LI Shiqi. Inverse Kinematics Analysis of Redundant Manipulators Based on BP Neural Network [J]. China Mechanical Engineering, 2019, 30(24): 2974-2977,2985. |
| [14] | PENG Yuhui1;WU Zhizhou1;HUANG Yupeng1;LEI Xiangyu2. Structure Improvement on Two-stage CNG Pressure Regulators Based on Method of DOE [J]. China Mechanical Engineering, 2019, 30(20): 2512-2519. |
| [15] | XIAO Fan;LI Guang;YOU Yulong. Multiple Module Neural Network Solving for Inverse Kinematics of Space 3R Manipulators [J]. China Mechanical Engineering, 2019, 30(10): 1233-1238. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||