

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (11): 2710-2719.DOI: 10.3969/j.issn.1004-132X.2025.11.029
Previous Articles Next Articles
Jihuang LIANG( ), Weifeng WANG, Haibin WU()
), Weifeng WANG, Haibin WU()
Received:2024-10-06
Online:2025-11-25
Published:2025-12-09
Contact:
Haibin WU
梁继煌(), 汪炜锋, 吴海彬()
通讯作者:
吴海彬
作者简介:梁继煌,男,2000年生,硕士研究生。研究方向为机器视觉、机器人控制技术。E-mail:525185614@qq.com基金资助:CLC Number:
Jihuang LIANG, Weifeng WANG, Haibin WU. High-precision Industrial Robot Teaching Method Based on 6D Light Pens[J]. China Mechanical Engineering, 2025, 36(11): 2710-2719.
梁继煌, 汪炜锋, 吴海彬. 基于6D光笔的工业机器人高精度示教方法[J]. 中国机械工程, 2025, 36(11): 2710-2719.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.11.029
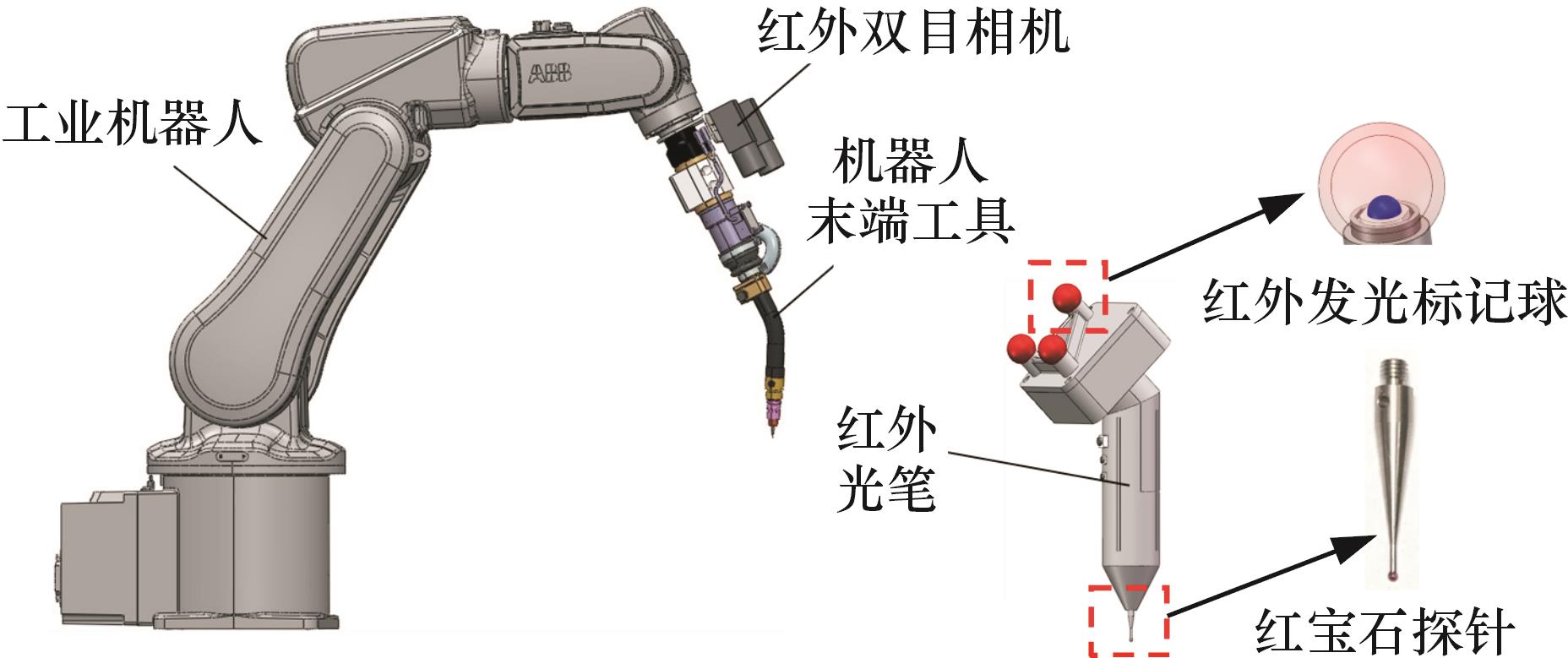
Fig.1 Industrial robot teaching system based on 6D light pen
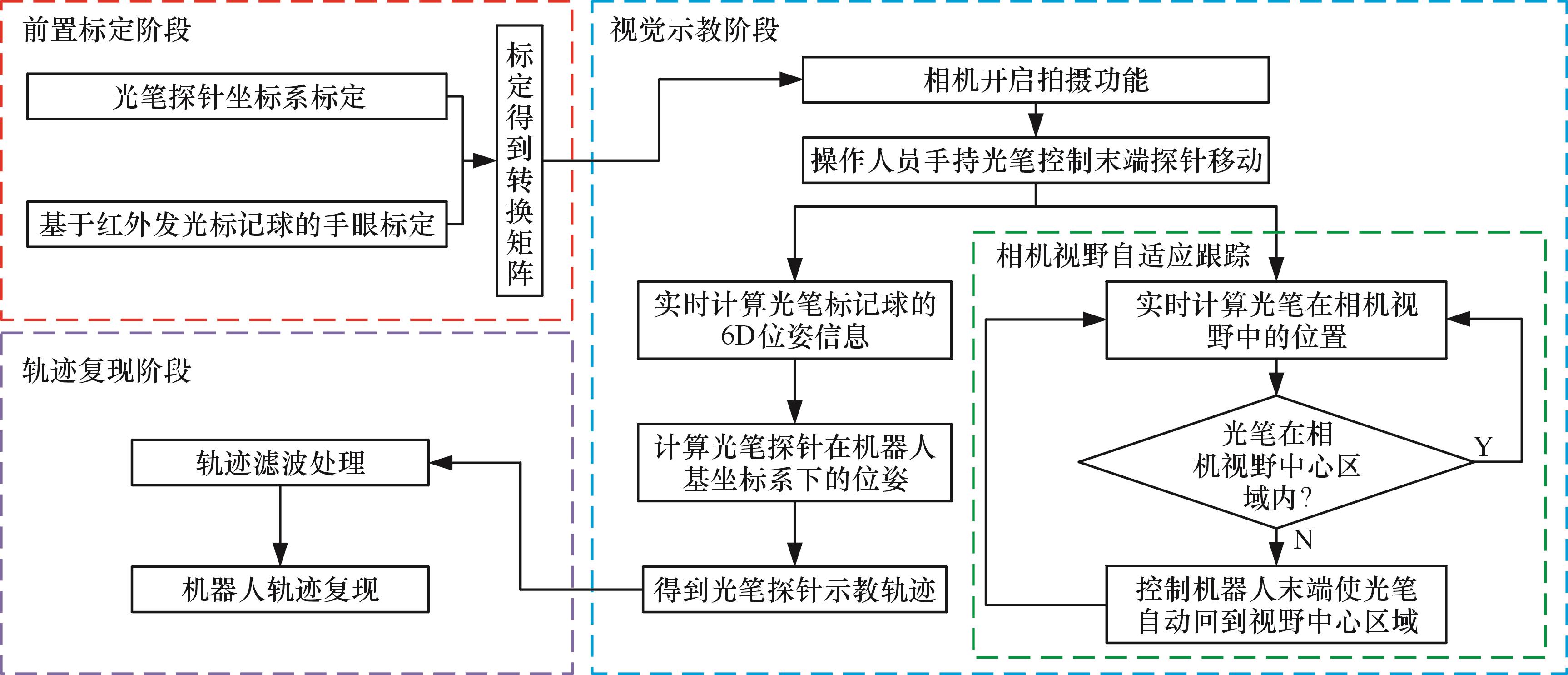
Fig.2 Flowchart of vision-based teaching method
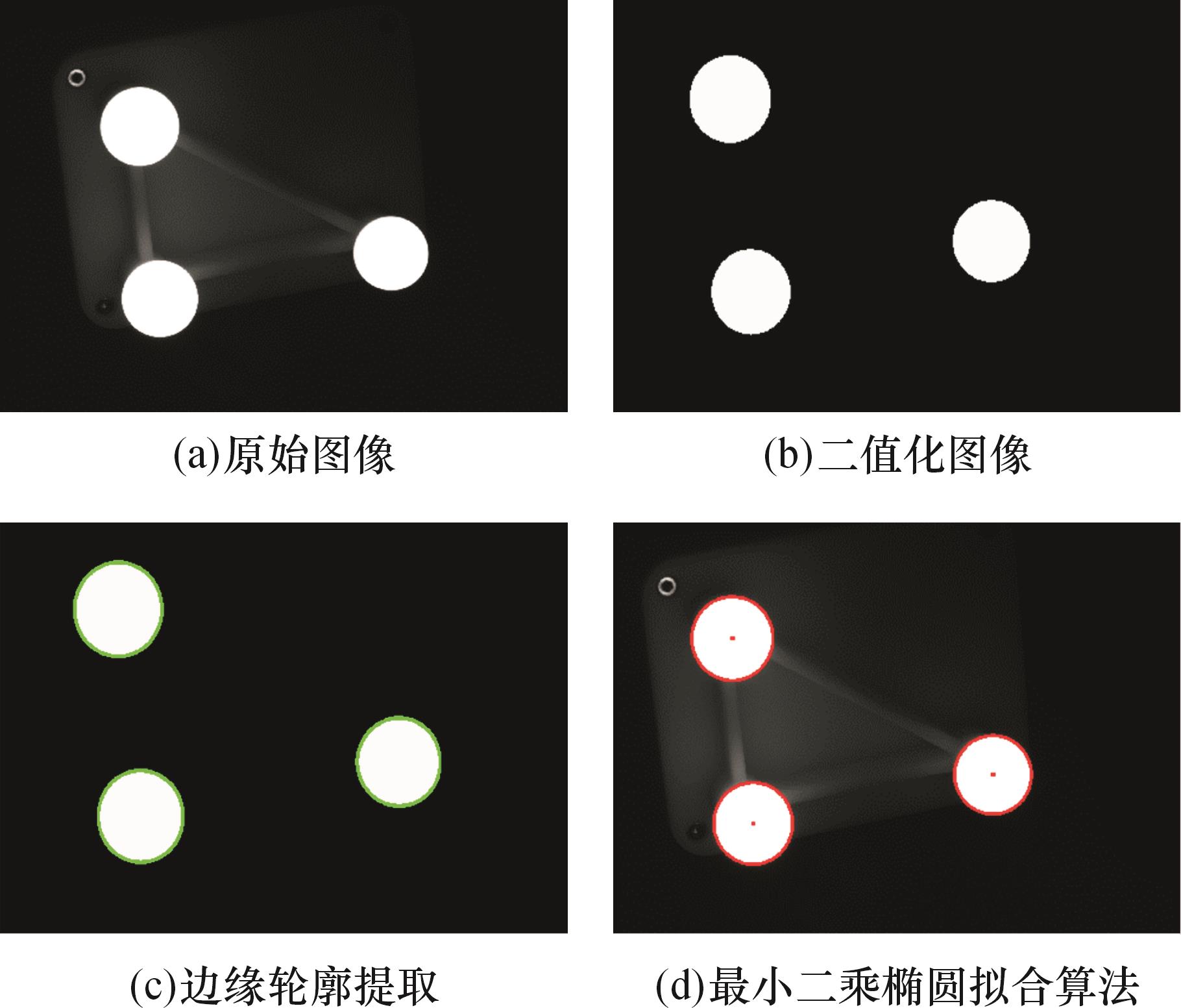
Fig.3 Subpixel circle center extraction algorithm
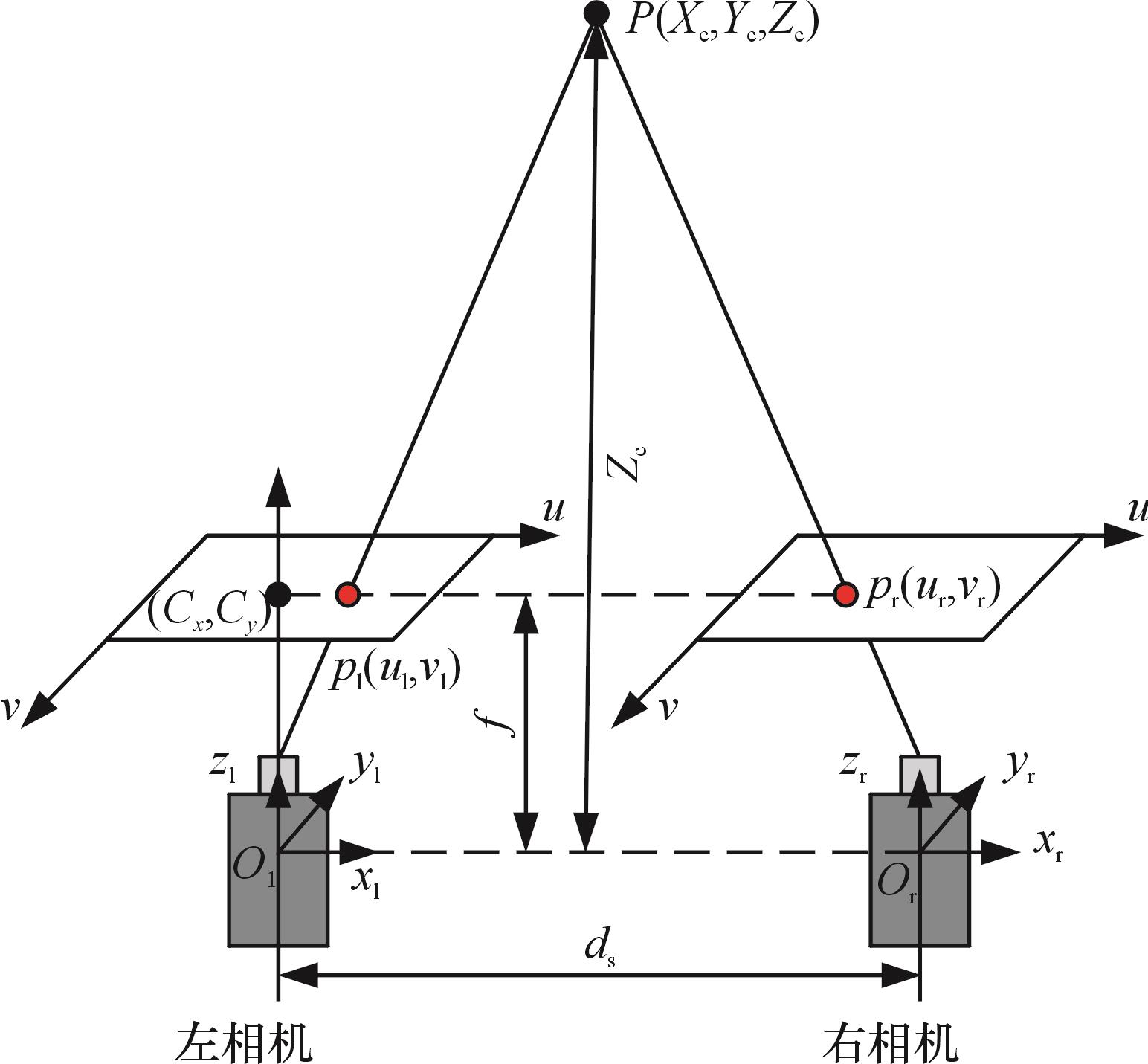
Fig.4 Binocular stereo vision measurement principle
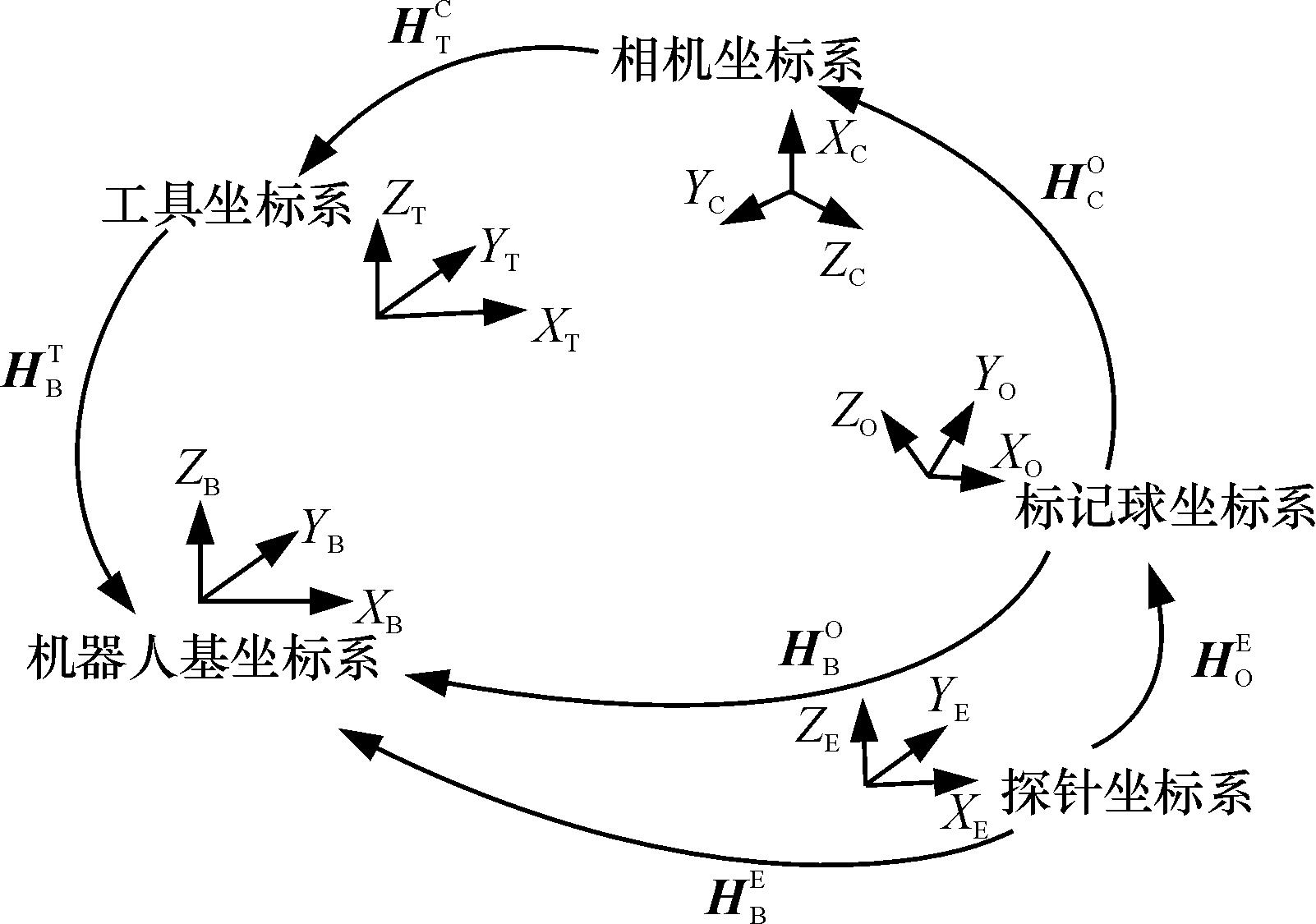
Fig.5 System coordinate system transformation relationship
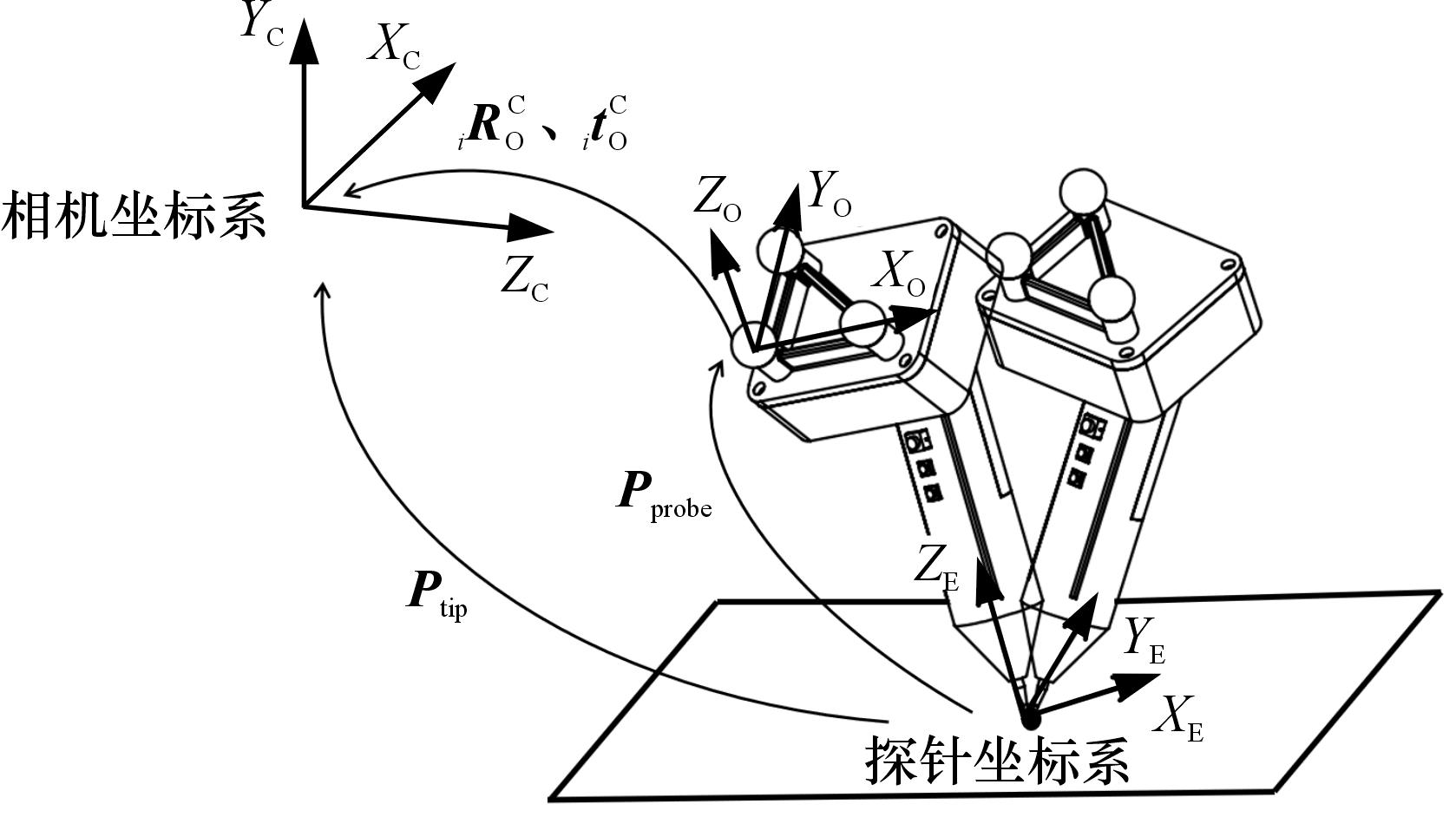
Fig.6 Light pen probe calibration
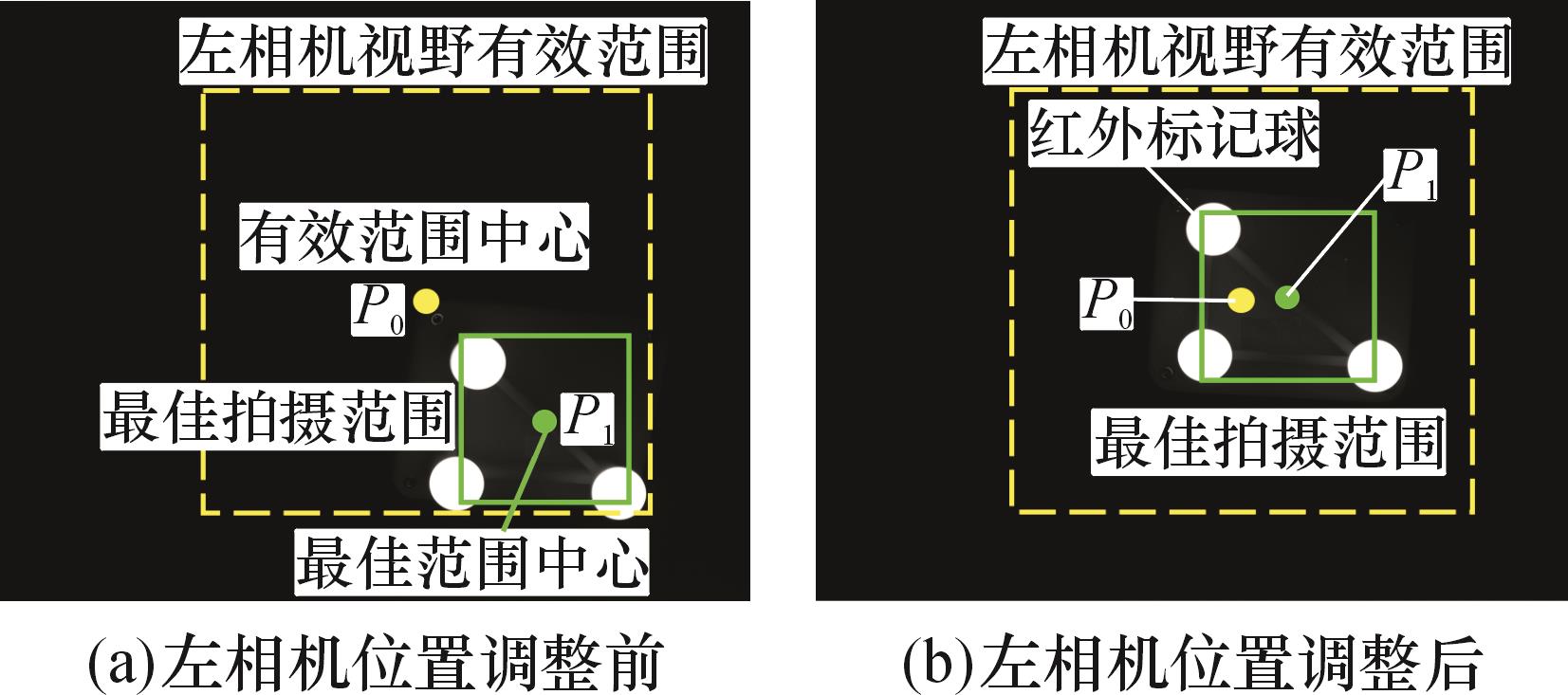
Fig.7 Adaptive tracking effect of the view
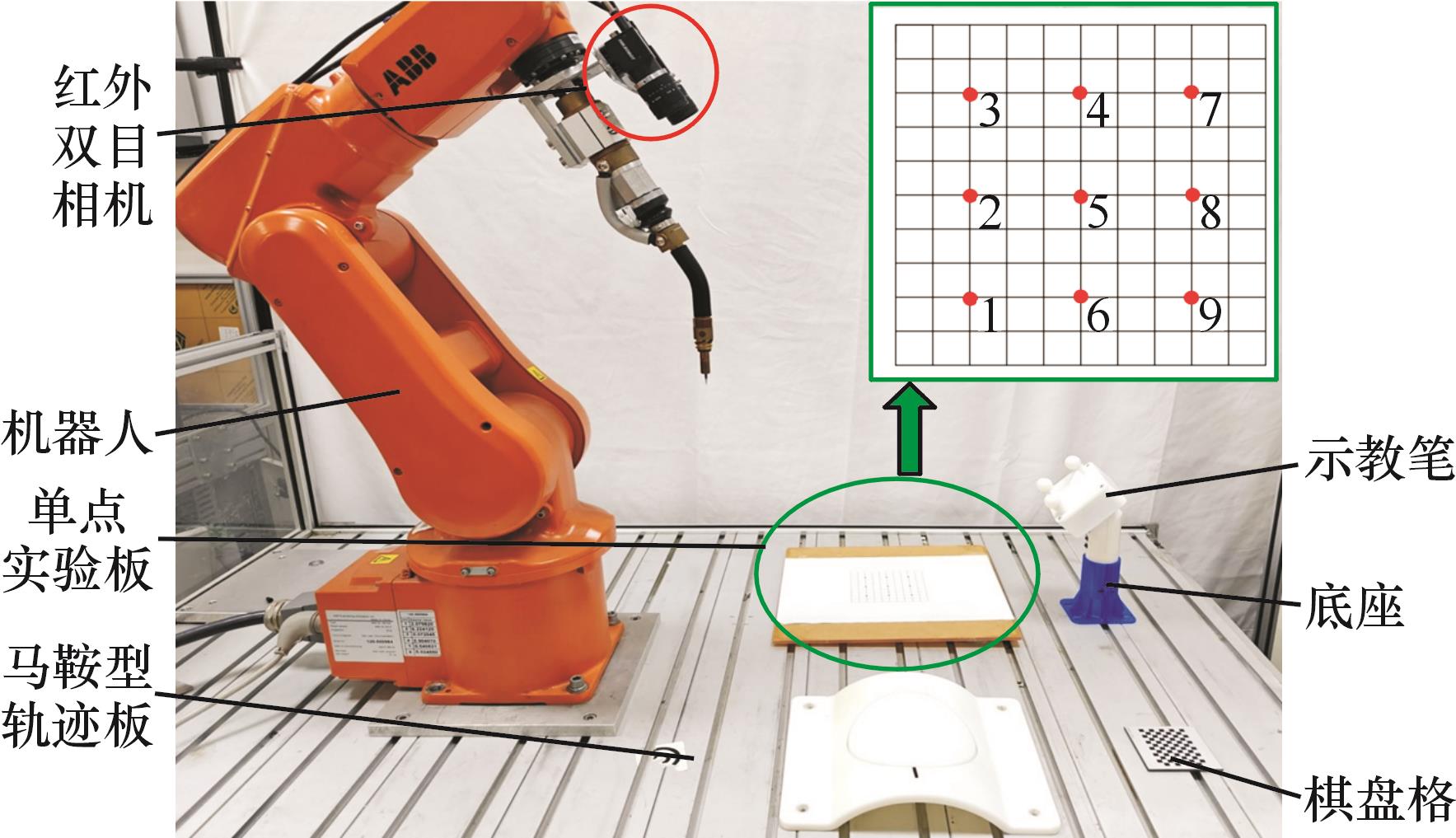
Fig.8 Teaching experiment platform
| 相机型号 | MV-CE060-10UM |
|---|---|
| 基线/mm | 130 |
| 相机焦距/mm | 12 |
| 分辨率 | 3072×2048 |
| 工作距离/mm | 600 |
| 双目视野区域/(mm×mm) | 299×211 |
Tab.1 Vision system parameters
| 相机型号 | MV-CE060-10UM |
|---|---|
| 基线/mm | 130 |
| 相机焦距/mm | 12 |
| 分辨率 | 3072×2048 |
| 工作距离/mm | 600 |
| 双目视野区域/(mm×mm) | 299×211 |
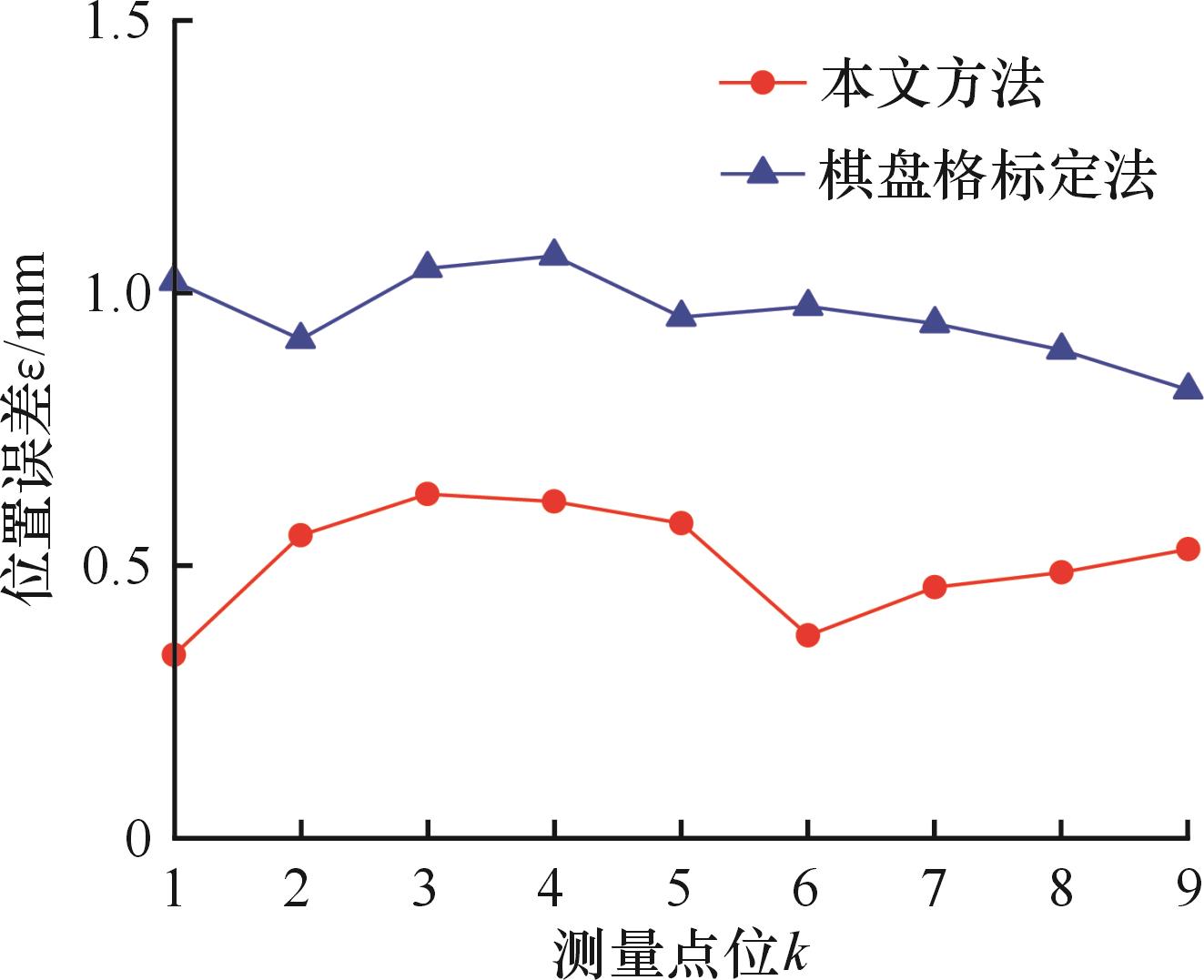
Fig.9 Hand-eye calibration comparison experiment
| 标定方法 | 最大误差/mm | 平均误差/mm |
|---|---|---|
| 本文方法 | 0.632 | 0.508 |
| 棋盘格标定法 | 1.068 | 0.960 |
Tab.2 Results of hand-eye calibration experiment
| 标定方法 | 最大误差/mm | 平均误差/mm |
|---|---|---|
| 本文方法 | 0.632 | 0.508 |
| 棋盘格标定法 | 1.068 | 0.960 |
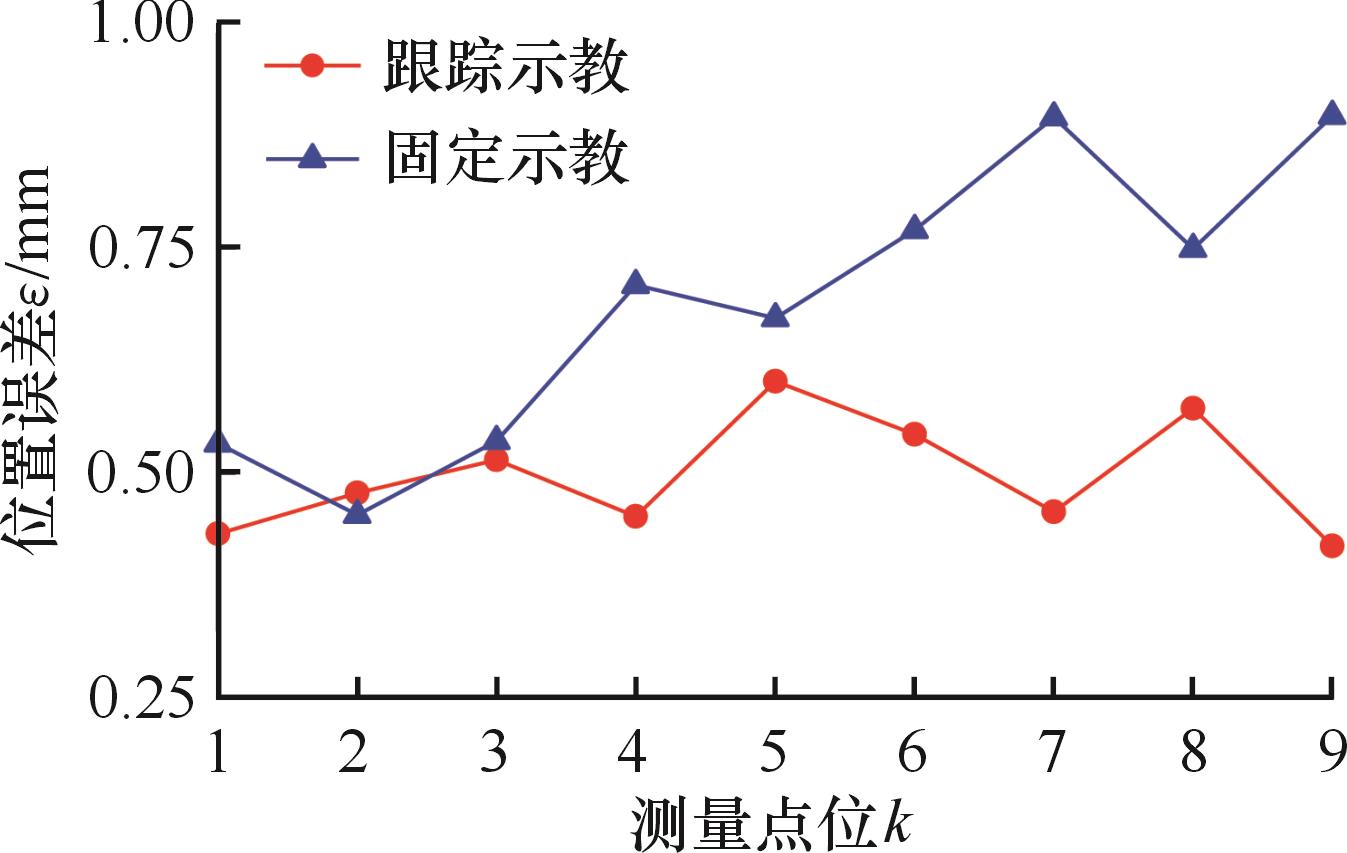
Fig.10 Tracking teaching comparison experiment
| 示教方法 | 最大误差/mm | 平均误差/mm |
|---|---|---|
| 跟踪示教 | 0.601 | 0.495 |
| 固定示教 | 0.896 | 0.685 |
Tab.3 Results of tracking teaching experiment
| 示教方法 | 最大误差/mm | 平均误差/mm |
|---|---|---|
| 跟踪示教 | 0.601 | 0.495 |
| 固定示教 | 0.896 | 0.685 |
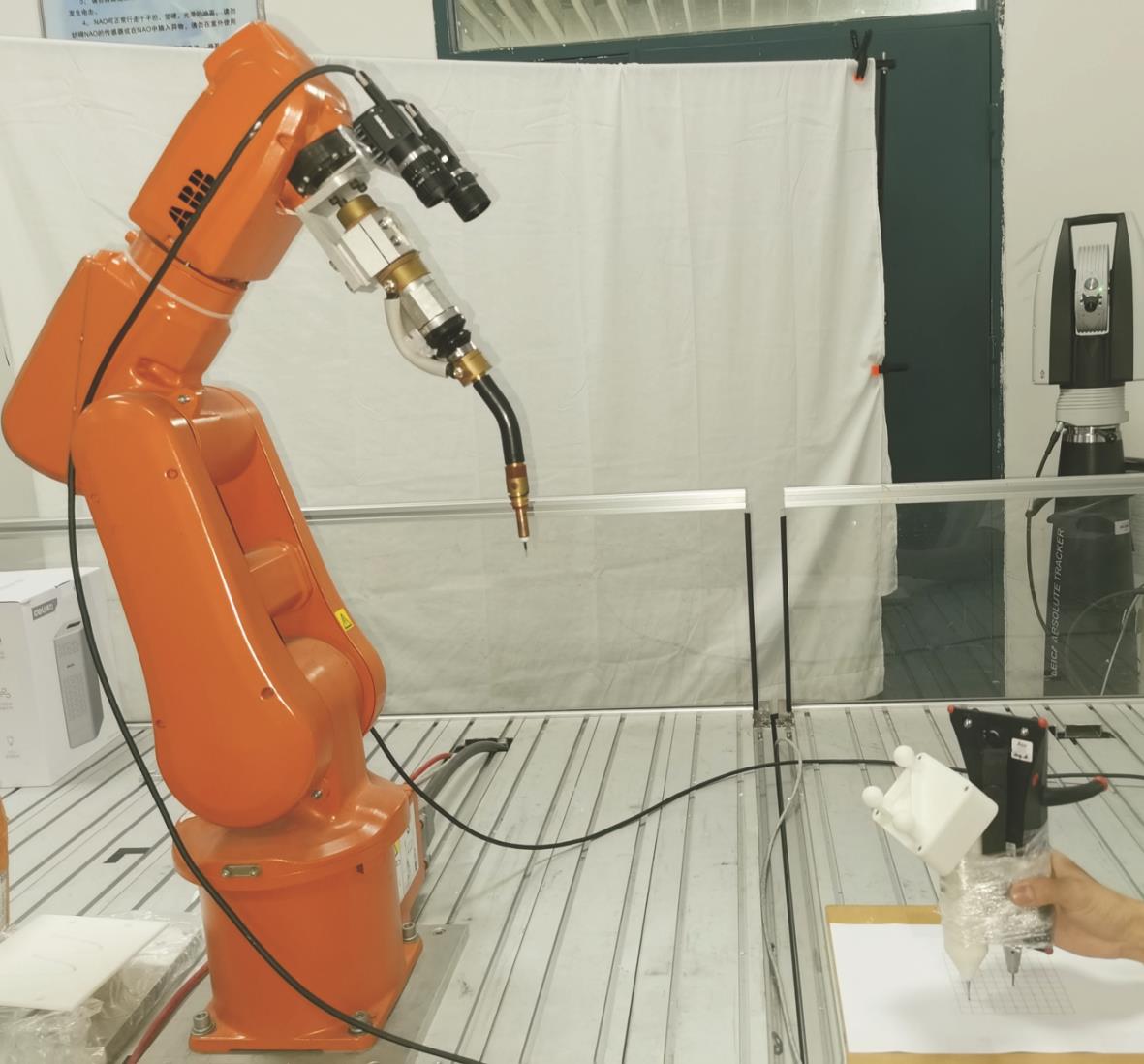
Fig.11 Attitude measurement experiment
| 组数 | |||
|---|---|---|---|
| 1 | 1.0545 | 2.1319 | 1.9704 |
| 2 | 1.9295 | 2.0772 | 1.6830 |
| 3 | 1.5376 | 1.2669 | 2.0890 |
| 4 | 2.0401 | 2.0154 | 1.9028 |
| 5 | 2.0536 | 1.9057 | 1.2350 |
| 6 | 1.7436 | 2.1306 | 1.7901 |
| 7 | 2.1239 | 1.7656 | 2.0860 |
| 8 | 1.7591 | 2.1432 | 1.8051 |
Tab.4 Results of attitude measurement
| 组数 | |||
|---|---|---|---|
| 1 | 1.0545 | 2.1319 | 1.9704 |
| 2 | 1.9295 | 2.0772 | 1.6830 |
| 3 | 1.5376 | 1.2669 | 2.0890 |
| 4 | 2.0401 | 2.0154 | 1.9028 |
| 5 | 2.0536 | 1.9057 | 1.2350 |
| 6 | 1.7436 | 2.1306 | 1.7901 |
| 7 | 2.1239 | 1.7656 | 2.0860 |
| 8 | 1.7591 | 2.1432 | 1.8051 |
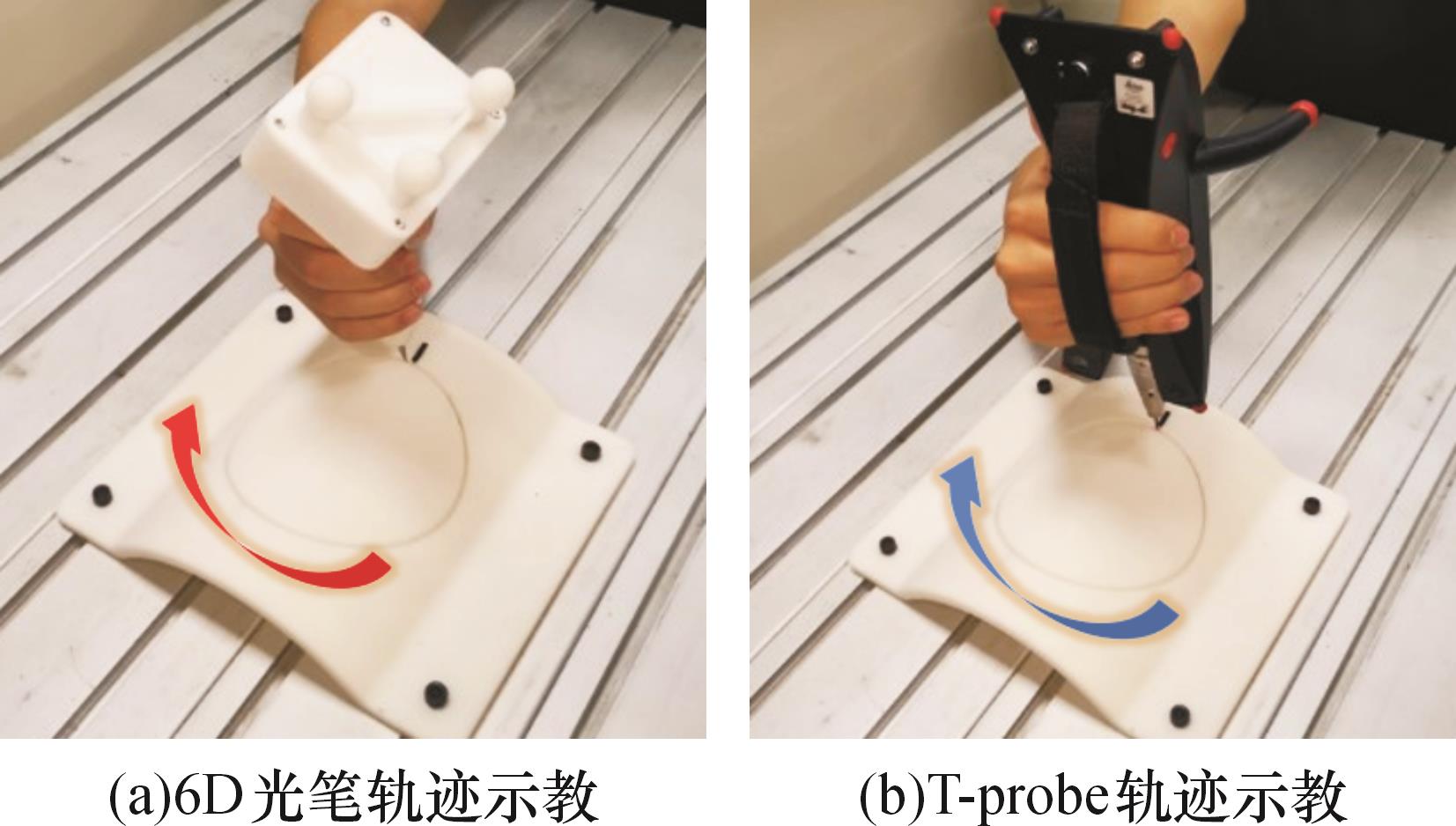
Fig.12 Dynamic teaching of saddle-shaped trajectory
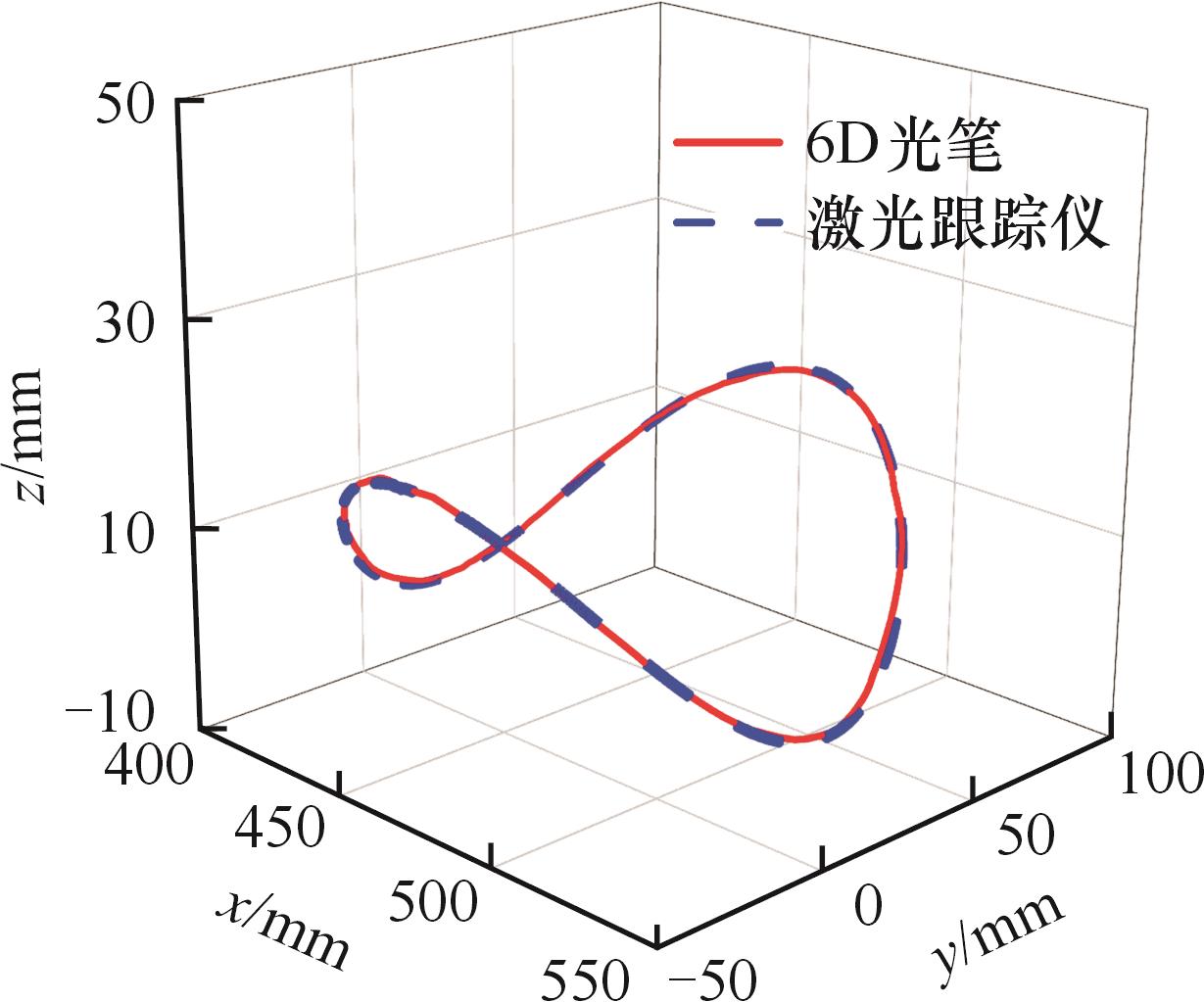
Fig.13 3D trajectory comparison

Fig.14 Robot trajectory reproduction
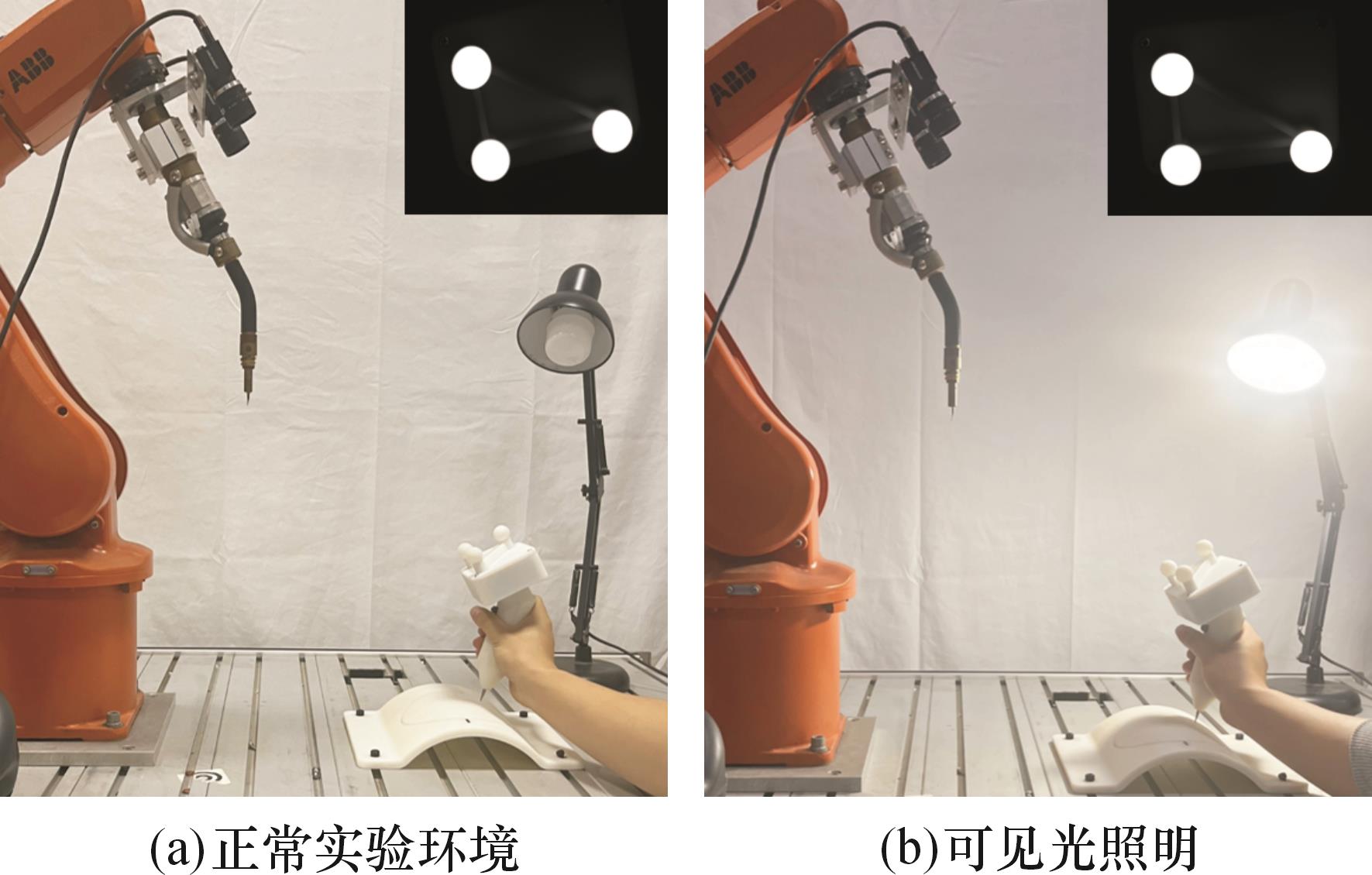
Fig.15 Comparison of experiments under different light environments
| 光照强度 | 最大误差/mm | 平均误差/mm |
|---|---|---|
| 正常光照(67 lx) | 0.734 | 0.618 |
| 弱(153 lx) | 0.715 | 0.634 |
| 中(376 lx) | 0.748 | 0.613 |
| 强(742 lx) | 0.704 | 0.638 |
Tab.5 Comparison of errors under different lighting environments
| 光照强度 | 最大误差/mm | 平均误差/mm |
|---|---|---|
| 正常光照(67 lx) | 0.734 | 0.618 |
| 弱(153 lx) | 0.715 | 0.634 |
| 中(376 lx) | 0.748 | 0.613 |
| 强(742 lx) | 0.704 | 0.638 |
| 示教方法 | 示教精度/mm | 是否受可见光影响 | 允许的示教姿态范围 |
|---|---|---|---|
| 本文方法 | 0.618 | 否 | 较大 |
| 棋盘格[ | 1.18 | 是 | 较小 |
| 多面体[ | 0.8 | 是 | 大 |
| 发光点[ | 1.3 | 是 | 中 |
| 球杆型[ | 2.94 | 是 | 大 |
Tab.6 Precision comparison of this paper's method with existing methods
| 示教方法 | 示教精度/mm | 是否受可见光影响 | 允许的示教姿态范围 |
|---|---|---|---|
| 本文方法 | 0.618 | 否 | 较大 |
| 棋盘格[ | 1.18 | 是 | 较小 |
| 多面体[ | 0.8 | 是 | 大 |
| 发光点[ | 1.3 | 是 | 中 |
| 球杆型[ | 2.94 | 是 | 大 |
| [1] | 吴超群, 赵松, 雷艇. 曲线焊缝的机器人焊接轨迹规划与高频控制[J]. 中国机械工程, 2023, 34(14): 1723-1728. |
| WU Chaoqun, ZHAO Song, LEI Ting. Robot Welding Trajectory Planning and High Frequency Control for Curved Seams [J]. China Mechanical Engineering, 2023, 34(14): 1723-1728. | |
| [2] | 葛吉民, 邓朝晖, 王水仙, 等. 基于点云的机器人焊缝自动化磨削系统与方法[J]. 中国机械工程, 2024, 35(7): 1253-1262. |
| GE Jimin, ZHENG Chaohui, WANG Shuixian, et al. Automated Grinding System and Method for Robotic Weld Seams Based on Point Cloud[J]. China Mechanical Engineering, 2024, 35(7):1253-1262. | |
| [3] | 曾超, 杨辰光, 李强, 等. 人-机器人技能传递研究进展 [J]. 自动化学报, 2019, 45(10): 1813-1828. |
| ZENG Chao, YANG Chenguang, LI Qiang, et al. Research Progress on Human-Robot Skill Transfer [J]. Acta Automatica Sinica, 2019, 45(10): 1813-1828. | |
| [4] | CHANG H T, CHANG J Y. Sensor Glove Based on Novel Inertial Sensor Fusion Control Algorithm for 3-D Real-time Hand Gestures Measurements [J]. IEEE Transactions on Industrial Electronics, 2019, 67(1): 658-666. |
| [5] | TOGIA T, GKOURNELOS C, ANGELAKIS P, et al. Virtual Reality Environment for Industrial Robot Control and Path Design [J]. Procedia CIRP, 2021, 100: 133-138. |
| [6] | PAN Y, CHEN C, LI D, et al. Augmented Reality-based Robot Teleoperation System Using RGB-D Imaging and Attitude Teaching Device[J]. Robotics and Computer-Integrated Manufacturing, 2021, 71: 102167. |
| [7] | 倪自强, 王田苗, 刘达 . 基于视觉引导的工业机器人示教编程系统 [J]. 北京航空航天大学学报, 2016, 42(3): 562-568. |
| NI Ziqiang, WANG Tianmiao, LIU Da. Vision Guide Based Teaching Programming for Industrial Robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(3): 562-568. | |
| [8] | 应再恩, 平雪良, 李正洋, 等.基于视觉跟踪的机器人复杂轨迹模拟再现[J].机械设计与研究, 2014, 30(01): 39-41. |
| YING Zaien, PING Xuelian, LI Zhengyang, et al. The Simulation and Reconstruction of the Complex Robot Trajectories Based on Visual Tracking[J]. Mechanical Design and Research, 2014, 30(1): 39-41. | |
| [9] | LE T S, TRAN Q V, NGUYEN X L, et al. Solpen: an Accurate 6-DOF Positioning Tool for Vision-guided Robotics[J]. Electronics, 2022, 11(4): 618. |
| [10] | LIN H I, LIN Y H. A Novel Teaching System for Industrial Robots [J]. Sensors, 2014, 14(4): 6012-6031. |
| [11] | ZHANG H D, LIU S B, LEI Q J, et al. Robot Programming by Demonstration: a Novel System for Robot Trajectory Programming Based on Robot Operating System[J]. Advances in Manufacturing, 2020, 8: 216-229. |
| [12] | LIU L, ZHU P, GUAN J, et al. A Binocular Reconstruction Method Fused with Laplacian Image Information for Pavement Texture Evaluation[J]. Measurement, 2021, 185: 110039. |
| [13] | 毛成林, 于瑞强, 宋爱国. 一种结合TCP标定的深度相机手眼标定方法 [J]. 仪器仪表学报, 2023, 44(3): 280-286. |
| MAO Chenglin, YU Ruiqiang, SONG Aiguo. A Hand-eye Calibration Method for Depth Camera Combined with TCP Calibration [J]. Chinese Journal of Scientific Instrument, 2023, 44(3): 280-286. | |
| [14] | XU J, LI Q, WHITE BAI. A Novel Hand-eye Calibration Method for Industrial Robot and Line Laser Vision Sensor [J]. Sensor Review, 2023, 43(4): 259-265. |
| [15] | WU L, ZANG X, BAI M, et al. Simple and High‐precision Hand-eye Calibration for 3D Robot Measurement Systems [J]. Advanced Intelligent Systems, 2023, 5(12): 2300307. |
| [16] | PAN B, YU L, WU D, et al. Systematic Errors in Two-dimensional Digital Image Correlation due to Lens Distortion [J]. Optics and Lasers in Engineering, 2013, 51(2): 140-147. |
| [17] | TSAI R Y, LENZ R K. A New Technique for Fully Autonomous and Efficient 3D Robotics Hand-eye Calibration[J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 345-358. |
| [1] | LYU Rui, PENG Zhen, LYU Yuanjian, TIAN Linli, ZHU Dahu. Relocalization-based Hand-eye Calibration Algorithm for Blade Robotic Grinding Systems [J]. China Mechanical Engineering, 2022, 33(03): 339-347. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||