

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (5): 1095-1104.DOI: 10.3969/j.issn.1004-132X.2026.05.009
MU Junqi1,2,3( ), WEI Yiyang1,2,3, HOU Xuping1,2,3, ZONG Xiaofeng1,2,3()
), WEI Yiyang1,2,3, HOU Xuping1,2,3, ZONG Xiaofeng1,2,3()
Received:2025-06-19
Online:2026-05-25
Published:2026-06-09
Contact:
ZONG Xiaofeng
穆俊齐1,2,3(), 魏奕扬1,2,3, 侯旭萍1,2,3, 宗小峰1,2,3()
通讯作者:
宗小峰
作者简介:穆俊齐,男,1997年生,博士研究生。研究方向为软体机器人的设计与控制。发表论文6篇。E-mail: mjq@cug.edu.cn基金资助:CLC Number:
MU Junqi, WEI Yiyang, HOU Xuping, ZONG Xiaofeng. Design and Multi-gait Implementation of Layered Actuators Based on Fiber-Pneumatic Coupled Variable-stiffness Snake Robots[J]. China Mechanical Engineering, 2026, 37(5): 1095-1104.
穆俊齐, 魏奕扬, 侯旭萍, 宗小峰. 基于纤维-气动耦合的变刚度蛇形机器人分层驱动器设计及其多步态研究[J]. 中国机械工程, 2026, 37(5): 1095-1104.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.05.009
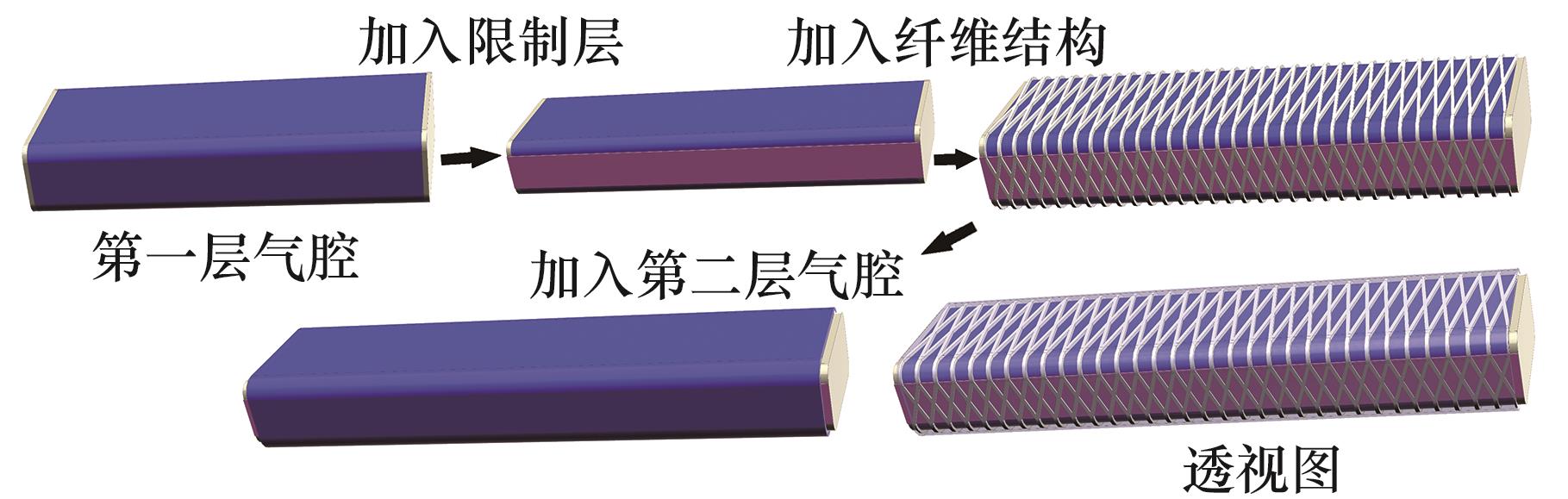
Fig.1 Schematic diagram of the pneumatic actuator structure
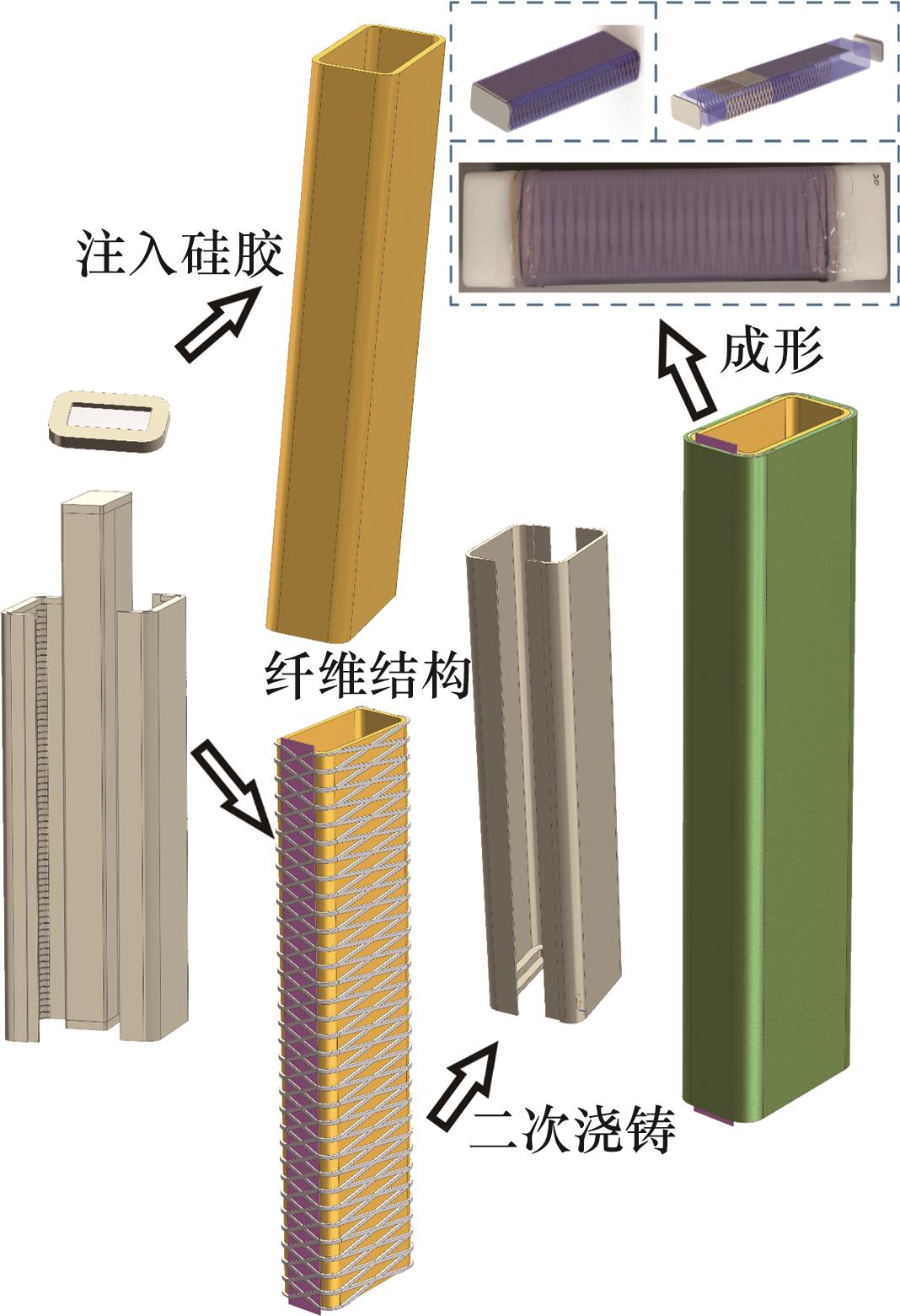
Fig.2 Schematic diagram of the manufacturing process of pneumatic actuator
| 特性参数 | HC9010 | HC9015 | HC9020 |
|---|---|---|---|
| 邵氏硬度HA | 10±2 | 15±2 | 20±2 |
| 撕裂强度/(kg·cm | 8±1 | 12±1 | 16±1 |
| 拉伸强度/(kg·cm | 25±5 | 30±8 | 35±8 |
| 伸长率/% | 520±50 | 500±50 | 480±50 |
Tab.1 Physical properties of silicone materials
| 特性参数 | HC9010 | HC9015 | HC9020 |
|---|---|---|---|
| 邵氏硬度HA | 10±2 | 15±2 | 20±2 |
| 撕裂强度/(kg·cm | 8±1 | 12±1 | 16±1 |
| 拉伸强度/(kg·cm | 25±5 | 30±8 | 35±8 |
| 伸长率/% | 520±50 | 500±50 | 480±50 |
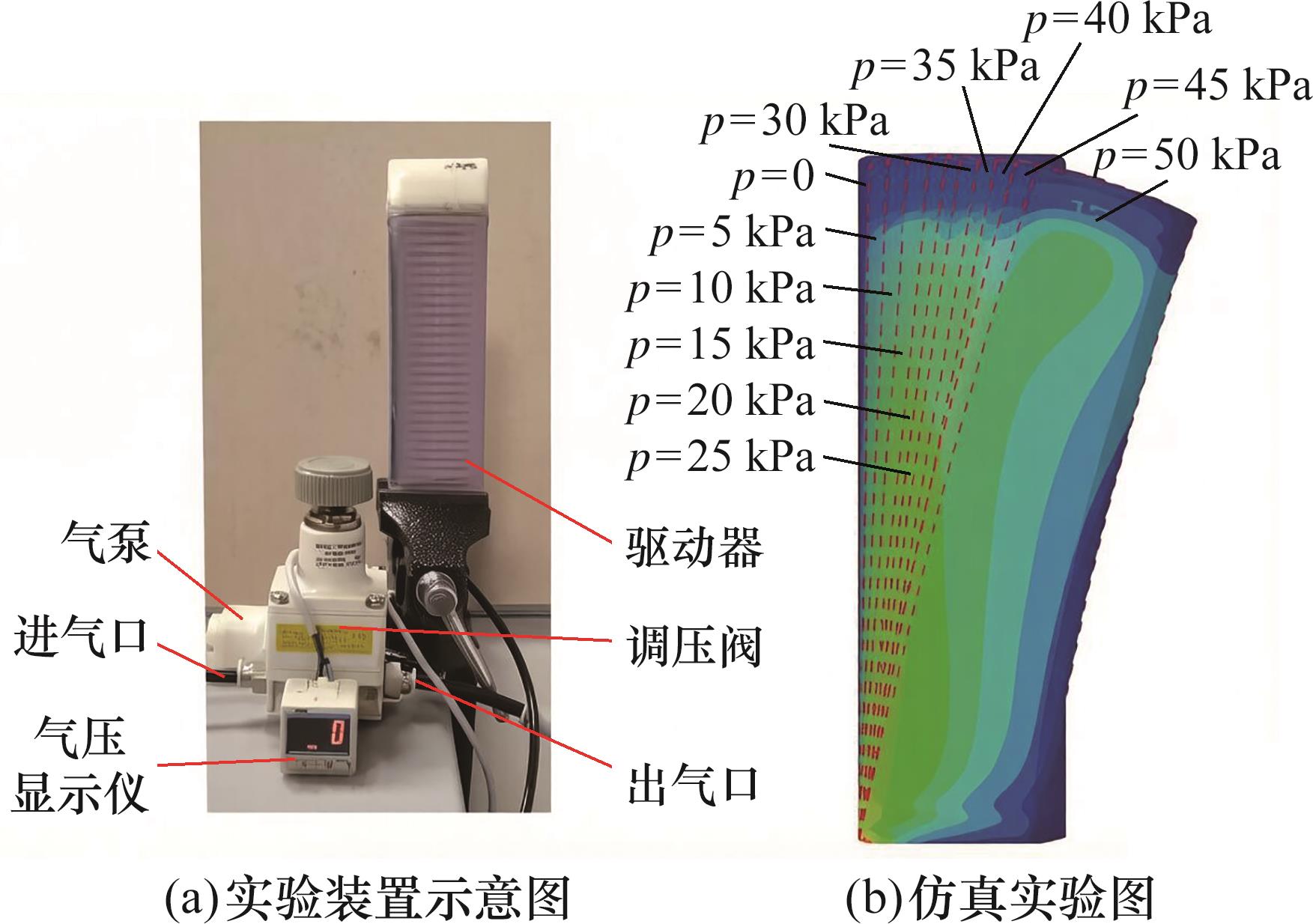
Fig.3 Composite structure pneumatic actuator
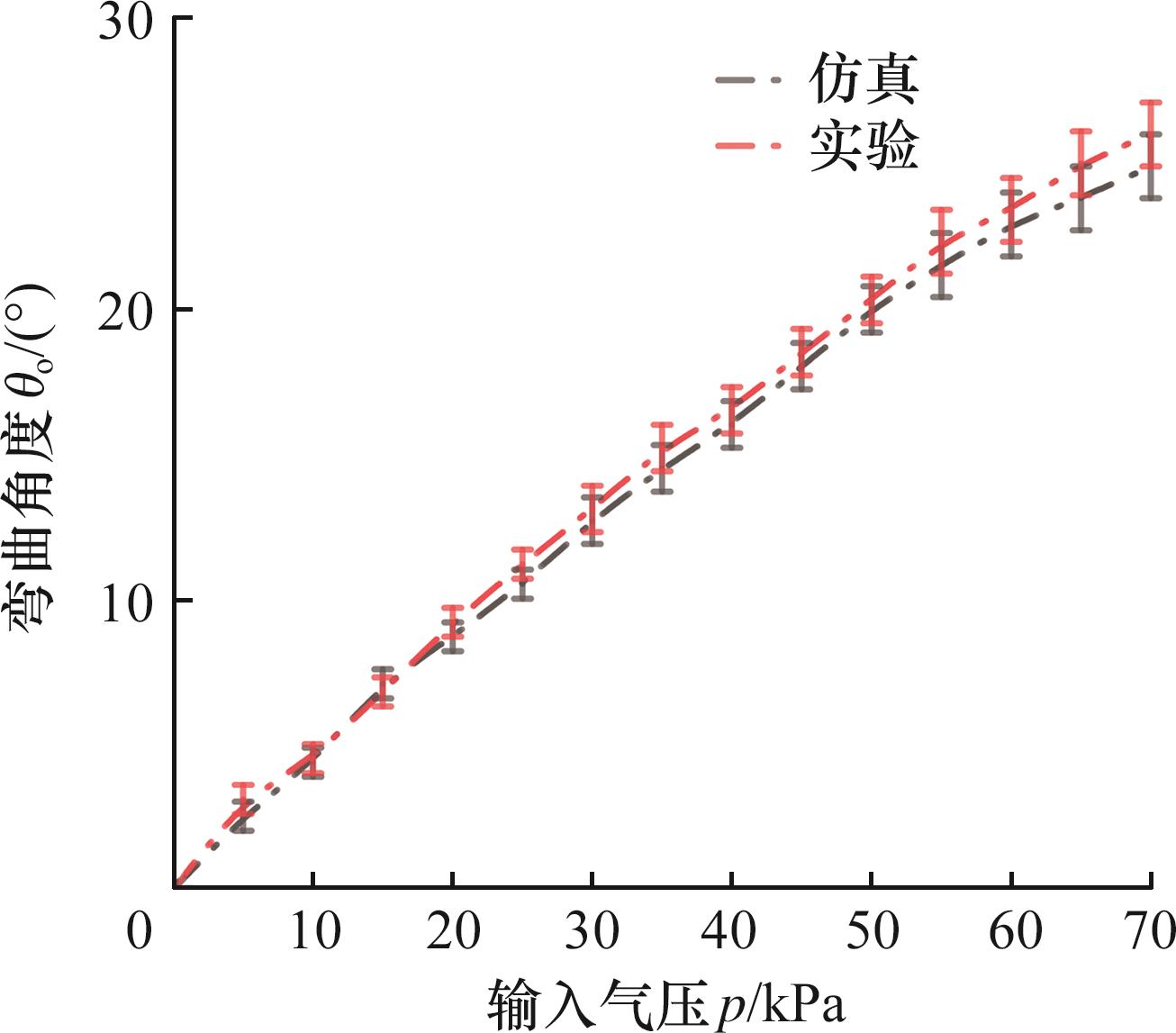
Fig.4 Line graph of input air pressure and bending angle
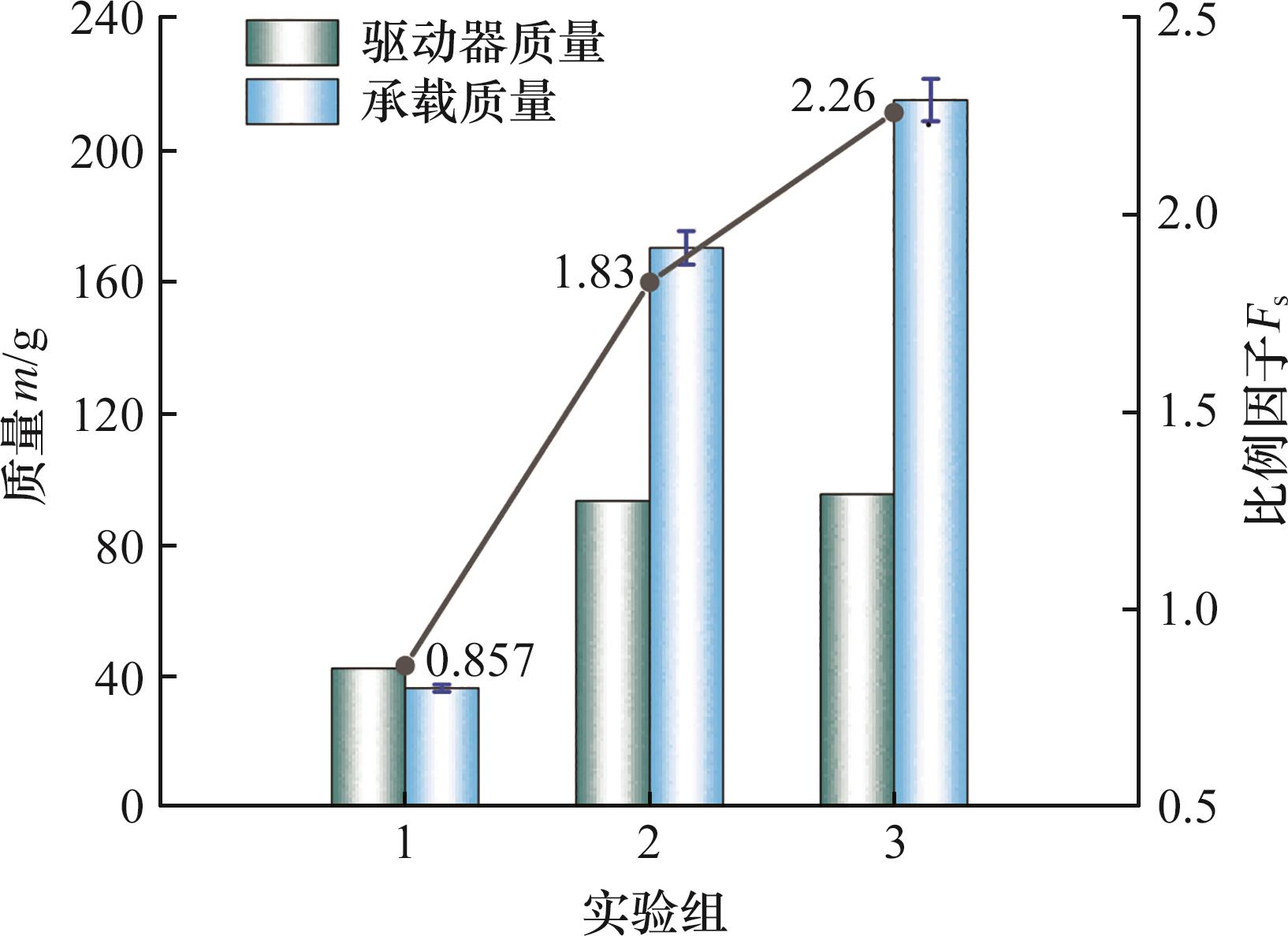
Fig. 5 Comparison experiment diagram of the carrying

Fig.6 Load test schematic of the load-bearing actuator
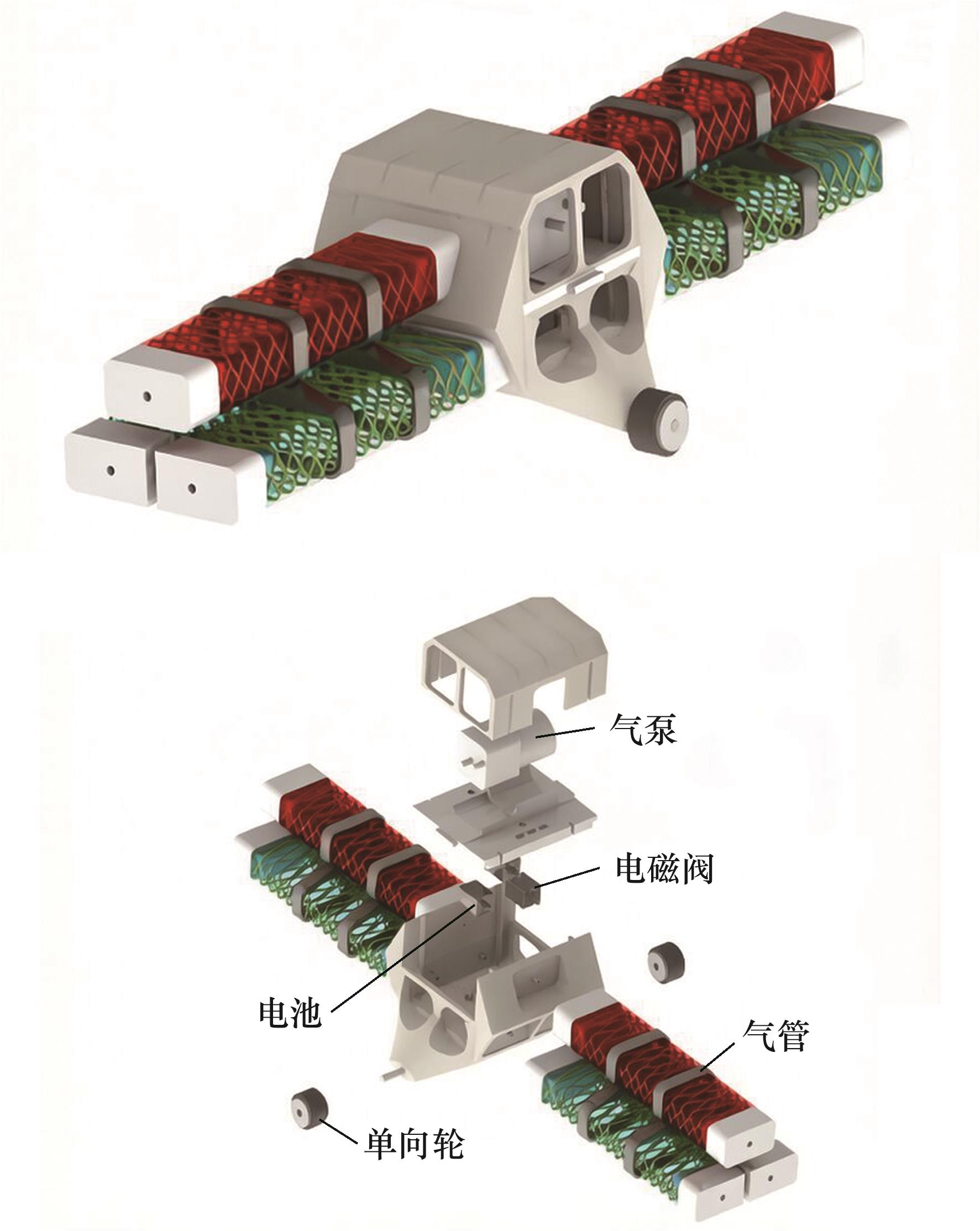
Fig.7 Schematic diagram of the module unit
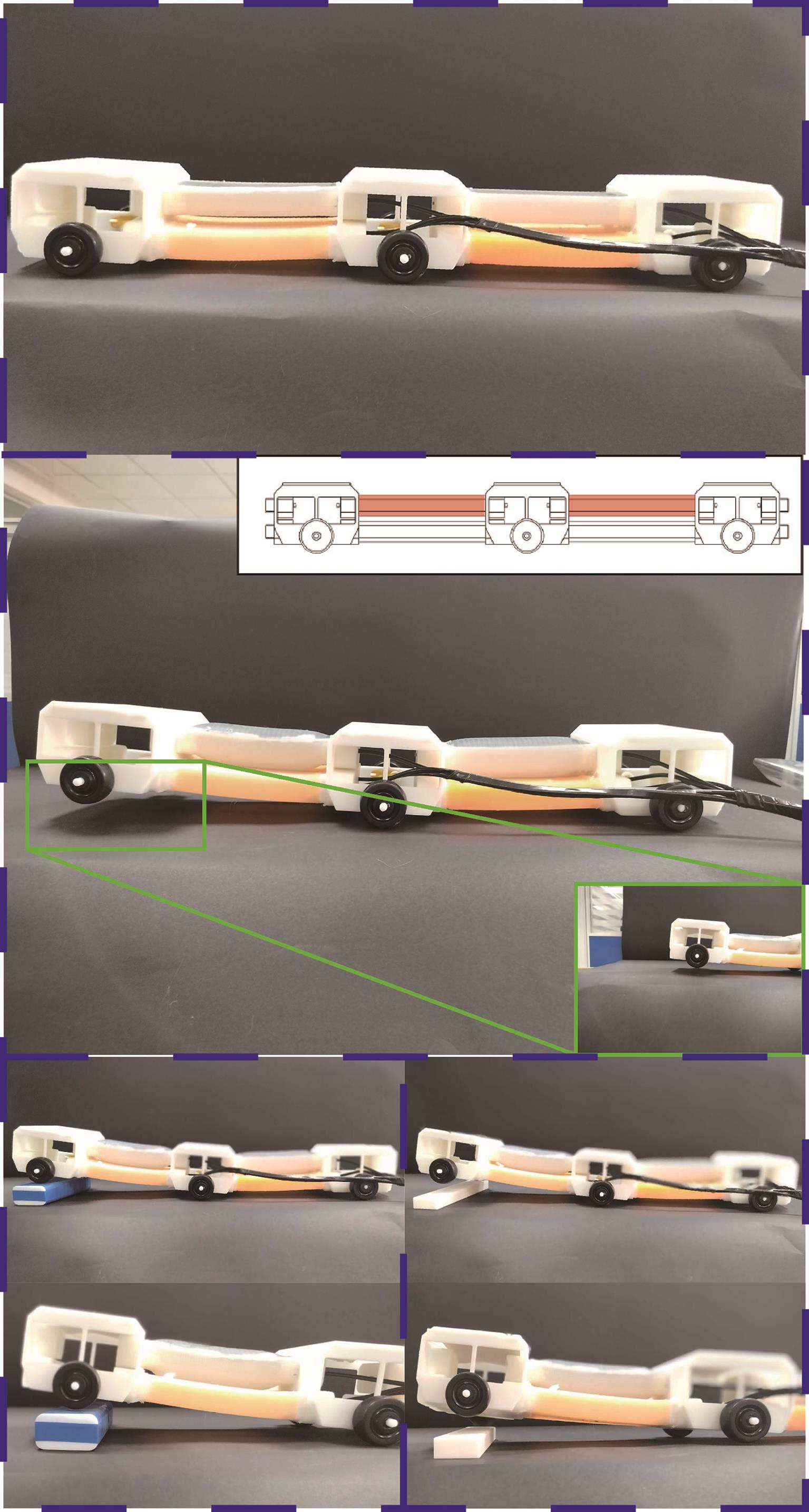
Fig.8 Physical picture of the soft serpentine robot
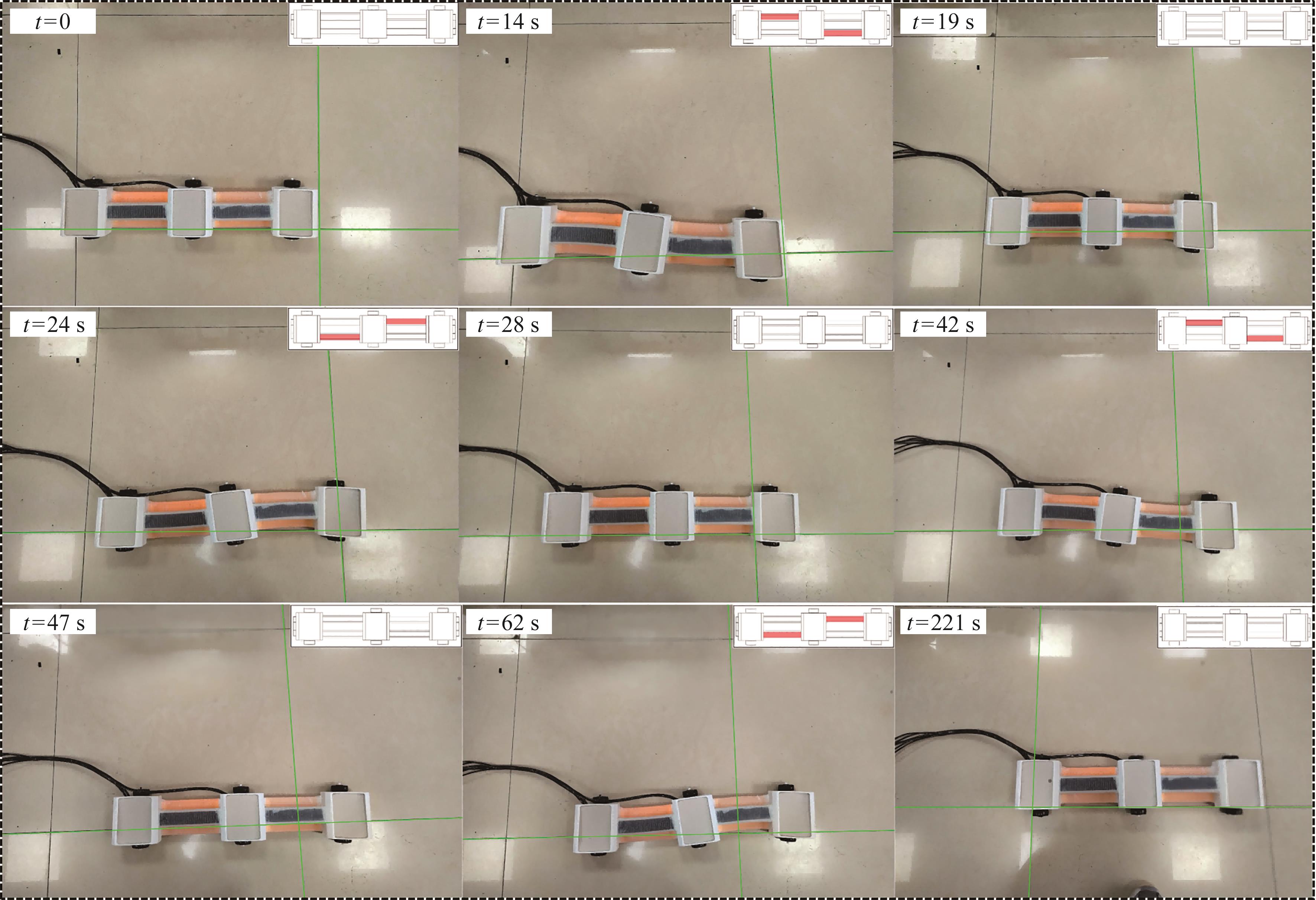
Fig.9 Schematic diagram of serpentine linear motion
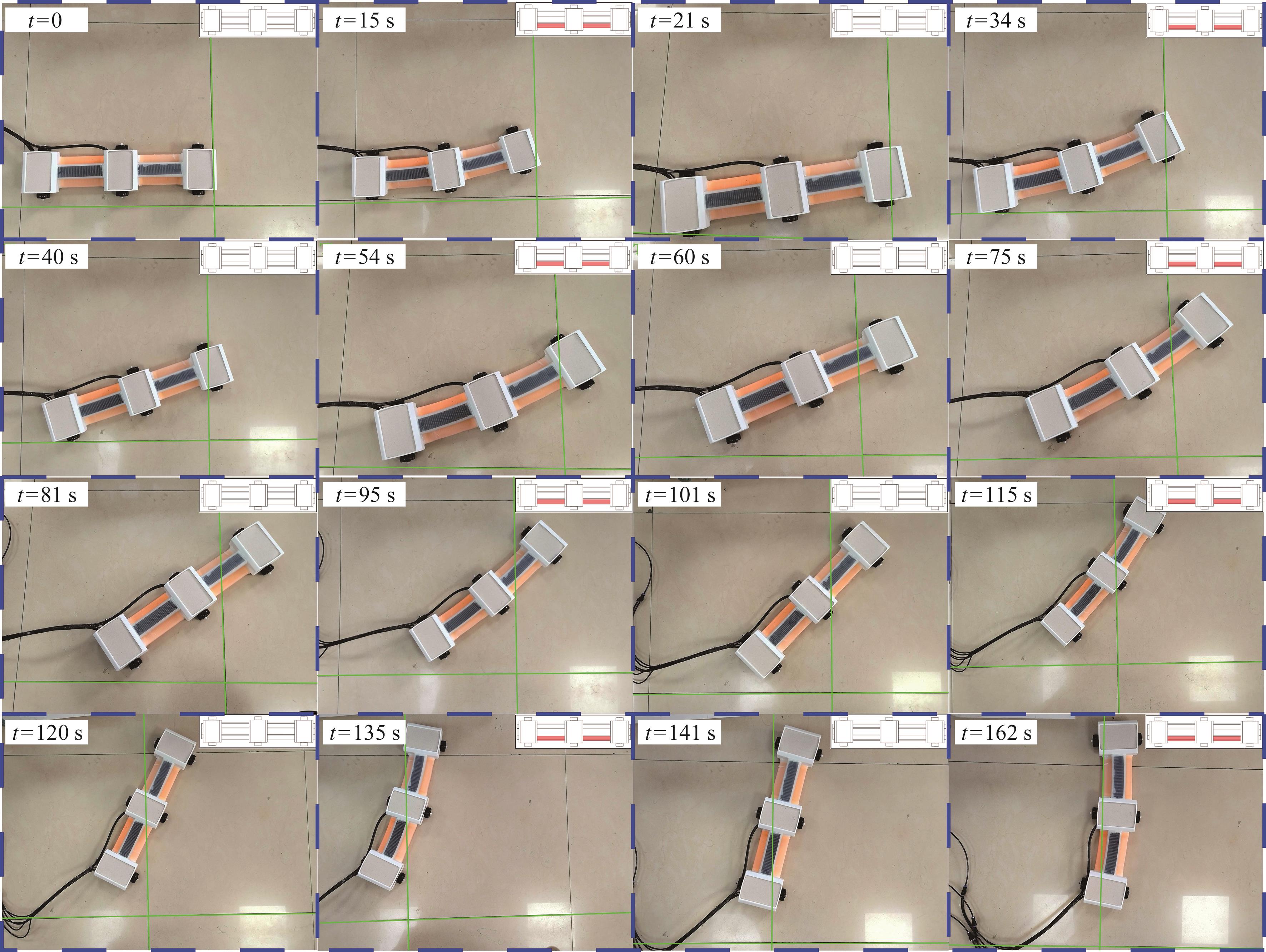
Fig.10 Schematic diagram of C-shaped angular motion
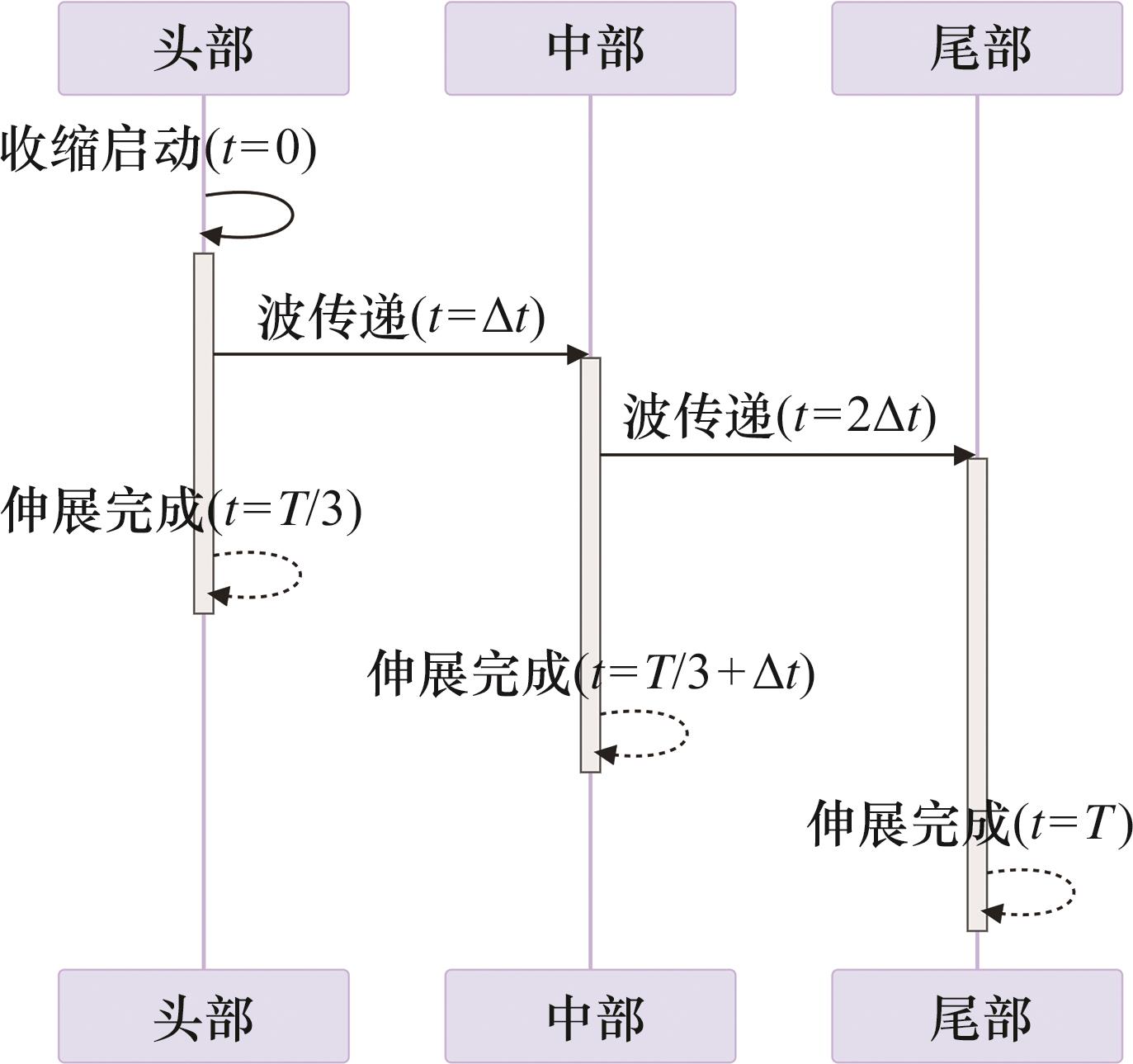
Fig.11 Simple graph of the accordion-type motion
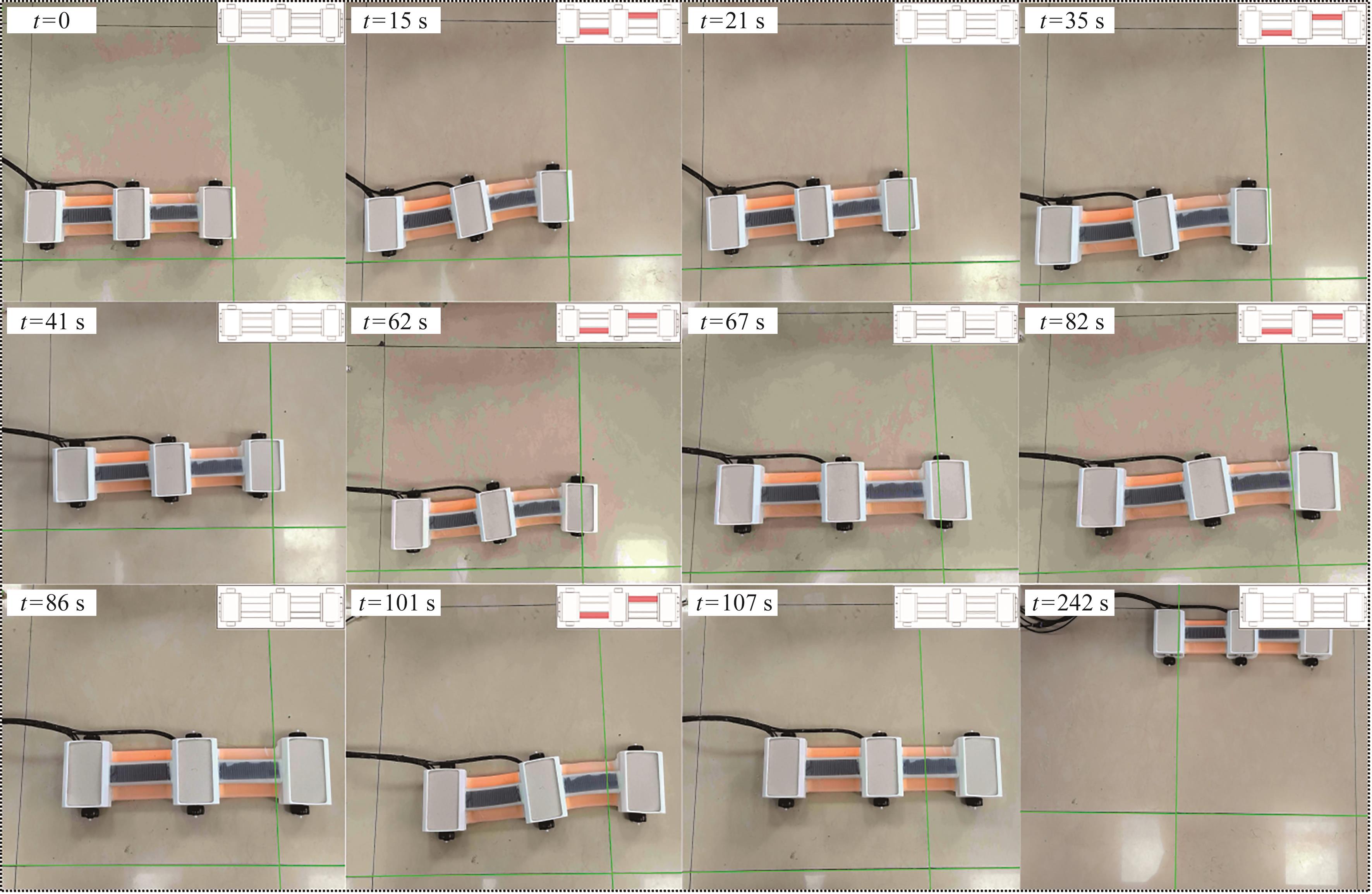
Fig.12 Schematic diagram of accordion-type movement
| [1] | JAVAID M, HALEEM A, SINGH R P, et al. Substantial Capabilities of Robotics in Enhancing Industry 4.0 Implementation[J]. Cognitive Robotics, 2021, 1: 58-75. |
| [2] | CHEN S, CAO Y, SARPARAST M, et al. Soft Crawling Robots: Design, Actuation, and Locomotion[J]. Advanced Materials Technologies, 2020, 5(2): 1900837. |
| [3] | 罗自荣, 洪阳, 蒋涛, 等. 微型仿生机器人研究现状综述[J]. 机械工程学报, 2025, 61(3): 178-196. |
| LUO Zirong, HONG Yang, JIANG Tao, et al. Review of Micro-bionic Robots[J]. Journal of Mechanical Engineering, 2025, 61(3): 178-196. | |
| [4] | 张来喜, 赵杨昊宇, 朱盛杰, 等. 双驱动器仿肺软体机器人建模与变形分析[J]. 中国机械工程, 2025, 36(10): 2379-2388. |
| ZHANG Laixi, ZHAO Yanghaoyu, ZHU Shengjie, et al. Modeling and Deformation Analysis of Dual Actuator Lung-like Soft Robots[J]. China Mechanical Engineering, 2025, 36(10): 2379-2388. | |
| [5] | 苏中, 张双彪, 李兴城. 蛇形机器人的研究与发展综述[J]. 中国机械工程, 2015, 26(3): 414-425. |
| SU Zhong, ZHANG Shuangbiao, LI Xingcheng. Present Situation and Development Tendency of Snake-like Robots[J]. China Mechanical Engineering, 2015, 26(3): 414-425. | |
| [6] | KOOPAEE M J, BAL S, PRETTY C, et al. Design and Development of a Wheel-less Snake Robot with Active Stiffness Control for Adaptive Pedal Wave Locomotion[J]. Journal of Bionic Engineering, 2019, 16: 593-607. |
| [7] | QI X, SHI H, PINTO T, et al. A Novel Pneumatic Soft Snake Robot Using Traveling-wave Locomotion in Constrained Environments[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1610-1617. |
| [8] | FUKUOKA Y, OTAKA K, TAKEUCHI R, et al. Mechanical Designs for Field Undulatory Locomotion by a Wheeled Snake-like Robot with Decoupled Neural Oscillators[J]. IEEE Transactions on Robotics, 2023, 39(2): 959-977. |
| [9] | ABDULSHAHEED A G, HUSSEIN M BIN, DZAHIR M A M, et al. A Review on Snake Robot Locomotion, Modelling, and Controlling in Challenging Environment[J]. Journal of Computational and Theoretical Nanoscience, 2020, 17(2): 558-569. |
| [10] | WANG X, ZHANG Q, SHEN D, et al. A Novel Rescue Robot: Hybrid Soft and Rigid Structures for Narrow Space Searching[C]∥2019 IEEE International Conference on Robotics and Biomimetics(ROBIO). Dali, 2020: 2207-2213. |
| [11] | WANG K, GAO W, MA S, et al. Snake-like Robot with Fusion Gait for High Environmental Adaptability: Design, Modeling, and Experiment[J]. Applied Sciences, 2017, 7(11): 1133. |
| [12] | SUI D, ZHAO S, WANG T, et al. Design of a Bio-inspired Extensible Continuum Manipulator with Variable Stiffness[J]. Journal of Bionic Engineering, 2025, 22(1): 181-194. |
| [13] | HAN F, FEI L, ZOU R, et al. A Restorable, Variable Stiffness Pneumatic Soft Gripper Based on Jamming of Strings of Beads[J]. IEEE Transactions on Robotics, 2023, 39(5): 4065-4077. |
| [14] | XU F Y, JIANG F Y, JIANG Q S, et al. Soft Actuator Model for a Soft Robot with Variable Stiffness by Coupling Pneumatic Structure and Jamming Mechanism[J]. IEEE Access, 2020,8: 26356-26371. |
| [15] | HU T, LU X, YI J, et al. Biomimetic Soft Robotic Wrist with 3-DOF Motion and Stiffness Tunability Based on Ring-reinforced Pneumatic Actuators and a Particle Jamming Joint[J]. Science China Technological Sciences, 2024, 67(3): 774-790. |
| [16] | YIN X, ZHOU P, XIE J, et al. A Human Finger-inspired Shape-locking Pneumatic Gripper Enabled by Folding Laminar Jamming Structure[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(5): 3626-3637. |
| [17] | LIU T, XIA H, LEE D Y, et al. A Positive Pressure Jamming Based Variable Stiffness Structure and Its Application on Wearable Robots[J]. IEEE Robotics and Automation Society[J]. IEEE Robotics and Automation Letters, 2021, 6(4):8078-8085. |
| [1] | YUAN Yaohui, WANG Chengyong, LI Weiqiu, ZHENG Lijuan, YAN Bingjiang. Pneumatic Atomizer Design and Droplet Characterization for MQL in Metal Cutting [J]. China Mechanical Engineering, 2026, 37(4): 837-845. |
| [2] | MENG Deyuan, ZHANG Meng, LIU Songyong, TANG Chaoquan. High Precision Position and Posture Control of 6-DOF Parallel Platforms Driven by Pneumatic Muscles [J]. China Mechanical Engineering, 2026, 37(1): 73-82. |
| [3] | Xiumei LIU, Yunlong LUO, Beibei LI, Shen LIU, Qihang LIU, Yongtao LI, Qiao ZHAO. Research on Output Characterization of Hydro-penumatic Suspensions Considering Gas Dissolution and Temperature [J]. China Mechanical Engineering, 2025, 36(11): 2492-2500. |
| [4] | Qiong WEI, Linyong BAI, Zichao CHEN, Daode ZHANG, Yi LI. Sliding Mode Control for Pneumatic Swing Angle Servo Systems Based on Disturbance Observation and Friction Compensation [J]. China Mechanical Engineering, 2025, 36(11): 2563-2573. |
| [5] | Hao LI, Xinrong LIU, Yiqin LIU, Diqing FAN. Research on Passive Compliance Control Method of High Altitude Wind Turbine Blade Grinding Robots Based on Improved ADRC [J]. China Mechanical Engineering, 2025, 36(08): 1832-1841. |
| [6] | LI Chaoyang1, LUO Tianhong2, MA Xiangyu2, FANG Shangchen1, WANG Ke3. Design and Research of Variable Instantaneous Center Exoskeletons Driven by Pneumatic Artificial Muscles [J]. China Mechanical Engineering, 2024, 35(10): 1783-1792. |
| [7] | LYU Boyang1, 2, 3, MENG Qingxin1, 2, 3, XIAO Huai1, 2, 3, LAI Xuzhi1, 2, 3, WANG Yawu1, 2, 3, WU Min1, 2, 3. Neural Network Sliding Mode Control of Bellows-type Pneumatic Soft Actuators Based on Improved Ternary Model [J]. China Mechanical Engineering, 2024, 35(08): 1414-1425. |
| [8] | ZHANG Dijia1, 2, GAO Luping2, ZHOU Shaoliang2, GAO Longlong2, LI Baoren2. Robust Control of High-pressure Pneumatic Pressure Servo Systems [J]. China Mechanical Engineering, 2024, 35(07): 1141-1150. |
| [9] | GAO Kun, REN Yanxiu, ZHU Yue, QI Lehua, LUO Jun. Experimental Study of Portable Pneumatic Milling for Battle Damages of Aircraft Titanium Alloy Skins [J]. China Mechanical Engineering, 2023, 34(19): 2320-2326. |
| [10] | WU Jianwei, SUN Beibei, JIANG Qiubo, CHEN Lin. Parameter Identification of Nonlinear Hydro-pneumatic Suspensions Based on Feature Extraction in Time-frequency Domain [J]. China Mechanical Engineering, 2023, 34(11): 1296-1305. |
| [11] | SUN Dong, WANG Ruochen, DING Renkai, CHEN Yijie. Semi-active Control of Hydro-pneumatic Suspensions for Mining Dump Trucks Based on Grey Wolf Algorithm [J]. China Mechanical Engineering, 2023, 34(04): 490-497. |
| [12] | CONG Ming, BI Cong, WANG Minghao, LIU Dong, DU Yu. Design of Soft Robots for Hand Function Rehabilitation Training [J]. China Mechanical Engineering, 2022, 33(08): 883-889. |
| [13] | REN Zongjin, LI Yang, XU Tianguo, LYU Jiangshan, HONG Ji. Research on Multi-point Measurement of Pneumatic Multi-dimensional Forces under Combined Support Mode [J]. China Mechanical Engineering, 2022, 33(02): 170-175,186. |
| [14] | . Stiffness Analysis of New Type Non-pneumatic Tires Based on Pseudo-rigid-flexible Body Coupling Model#br# [J]. China Mechanical Engineering, 2021, 32(09): 1051-1060,1072. |
| [15] | LIU Dong, WANG Minghao, BI Cong, SHUI Shengcai, CONG Ming, DU Yu. Design of Wearable Rigid and Soft Combined Hand Rehabilitation Devices [J]. China Mechanical Engineering, 2021, 32(08): 930-937. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||