

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (3): 571-585.DOI: 10.3969/j.issn.1004-132X.2026.03.007
GUO Wanjin1,2,3,4( ), LI Qianhui1, TIAN Yuxiang1, CAO Chuqing2,5, ZHAO Lijun2,4, XU Mingkun1, LIU Xiaoheng1, HOU Xudong1
), LI Qianhui1, TIAN Yuxiang1, CAO Chuqing2,5, ZHAO Lijun2,4, XU Mingkun1, LIU Xiaoheng1, HOU Xudong1
Received:2024-11-06
Online:2026-03-25
Published:2026-04-08
Contact:
GUO Wanjin
郭万金1,2,3,4(), 利乾辉1, 田玉祥1, 曹雏清2,5, 赵立军2,4, 徐明坤1, 刘孝恒1, 侯旭栋1
通讯作者:
郭万金
作者简介:郭万金*(通信作者),男,1983年生,副教授、博士研究生导师。主要研究方向为工业机器人颤振规避、工业机器人打磨主动柔顺控制。E-mail:guowanjin@chd.edu.cn。
基金资助:CLC Number:
GUO Wanjin, LI Qianhui, TIAN Yuxiang, CAO Chuqing, ZHAO Lijun, XU Mingkun, LIU Xiaoheng, HOU Xudong. Chatter Avoidance Method of Industrial Robotic Machining Based on Dynamics Mode Decoupling[J]. China Mechanical Engineering, 2026, 37(3): 571-585.
郭万金, 利乾辉, 田玉祥, 曹雏清, 赵立军, 徐明坤, 刘孝恒, 侯旭栋. 动力学模态解耦的工业机器人加工颤振规避方法[J]. 中国机械工程, 2026, 37(3): 571-585.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.03.007

Fig.1 Robot configuration[11]
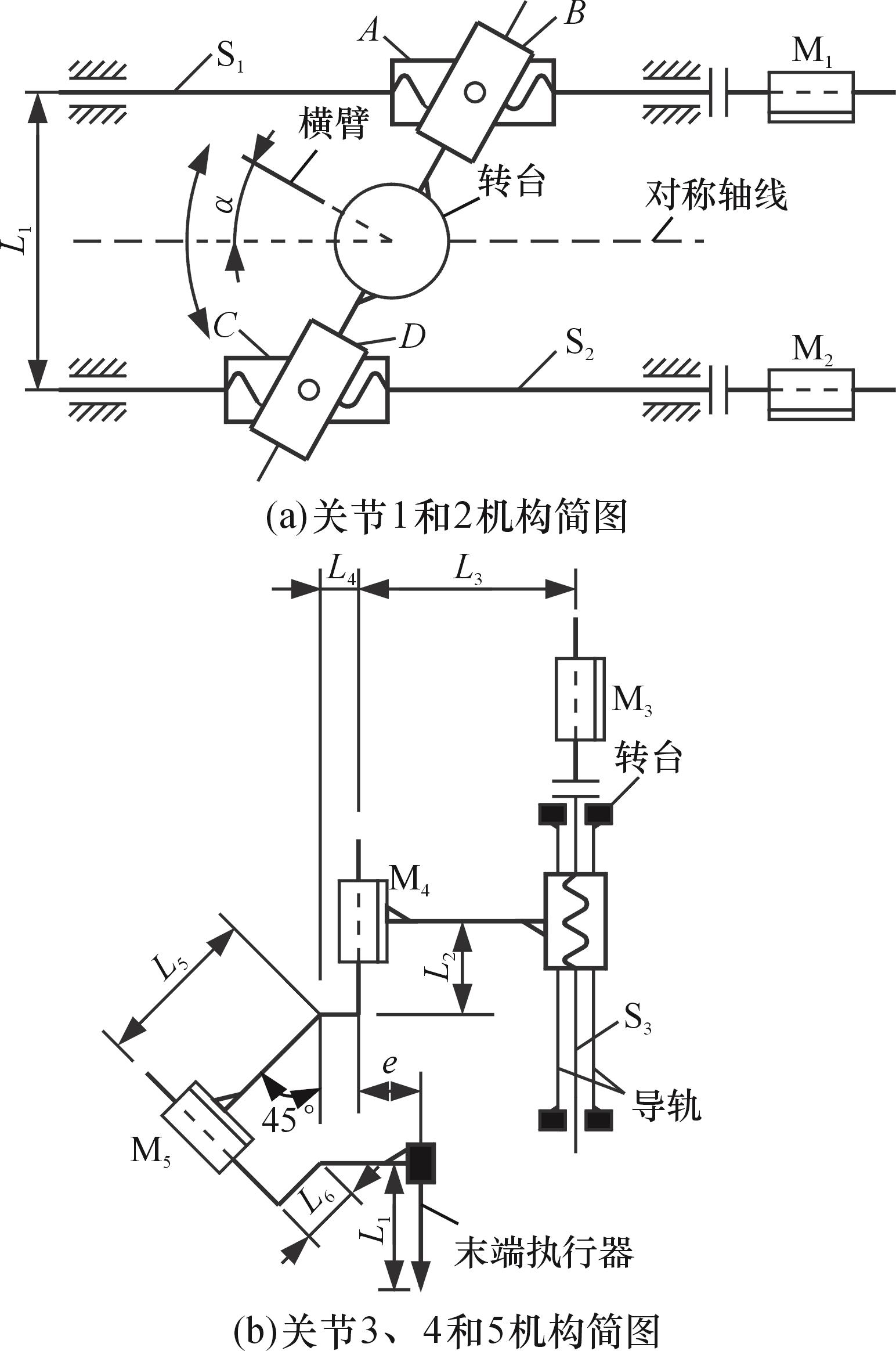
Fig.2 Robot mechanism diagram[11]
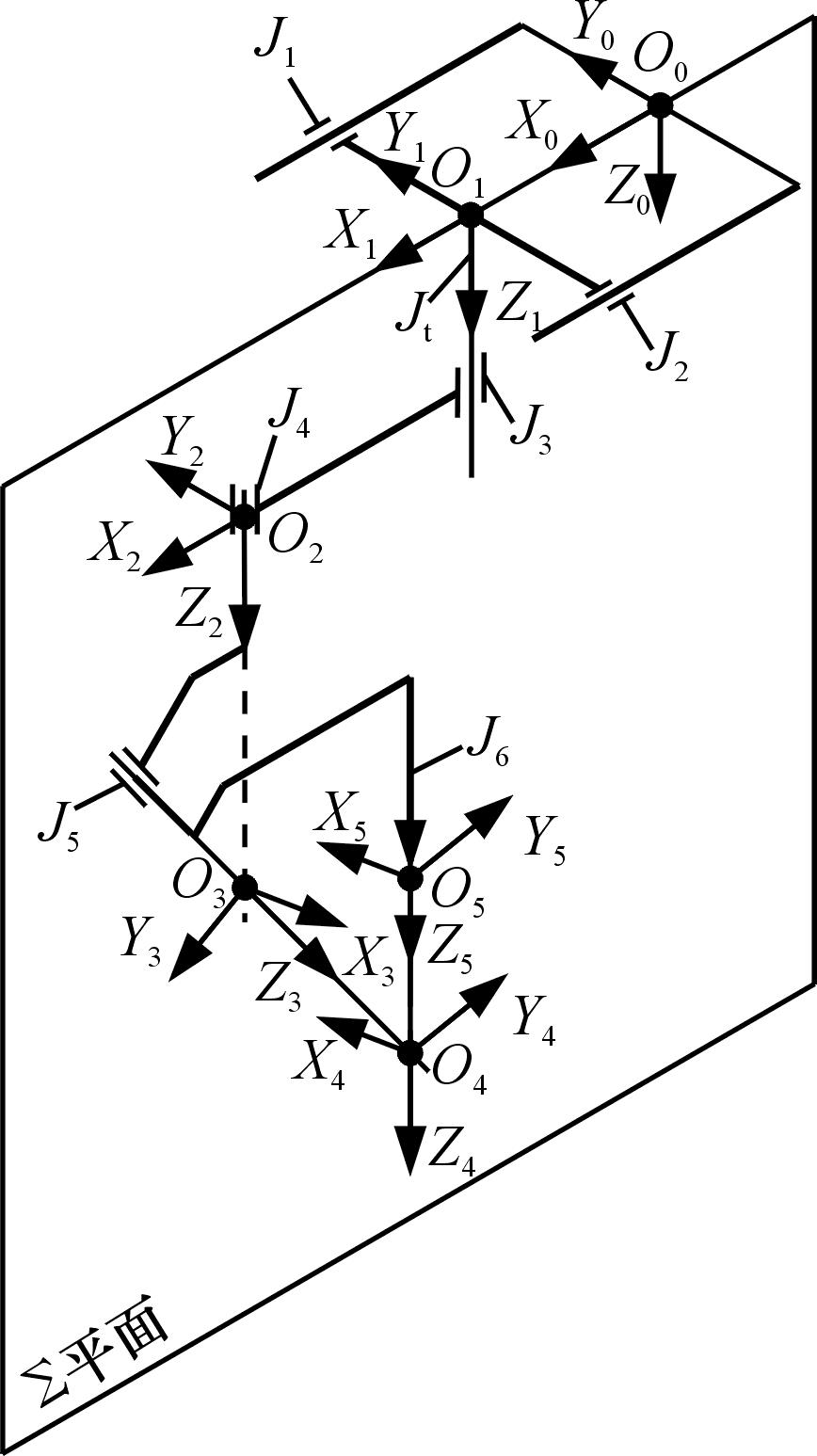
Fig.3 D-H reference coordinate system[11]
Tab. 1 Robot link parameters[11]

Fig.4 Rigidity identification experiment[14]
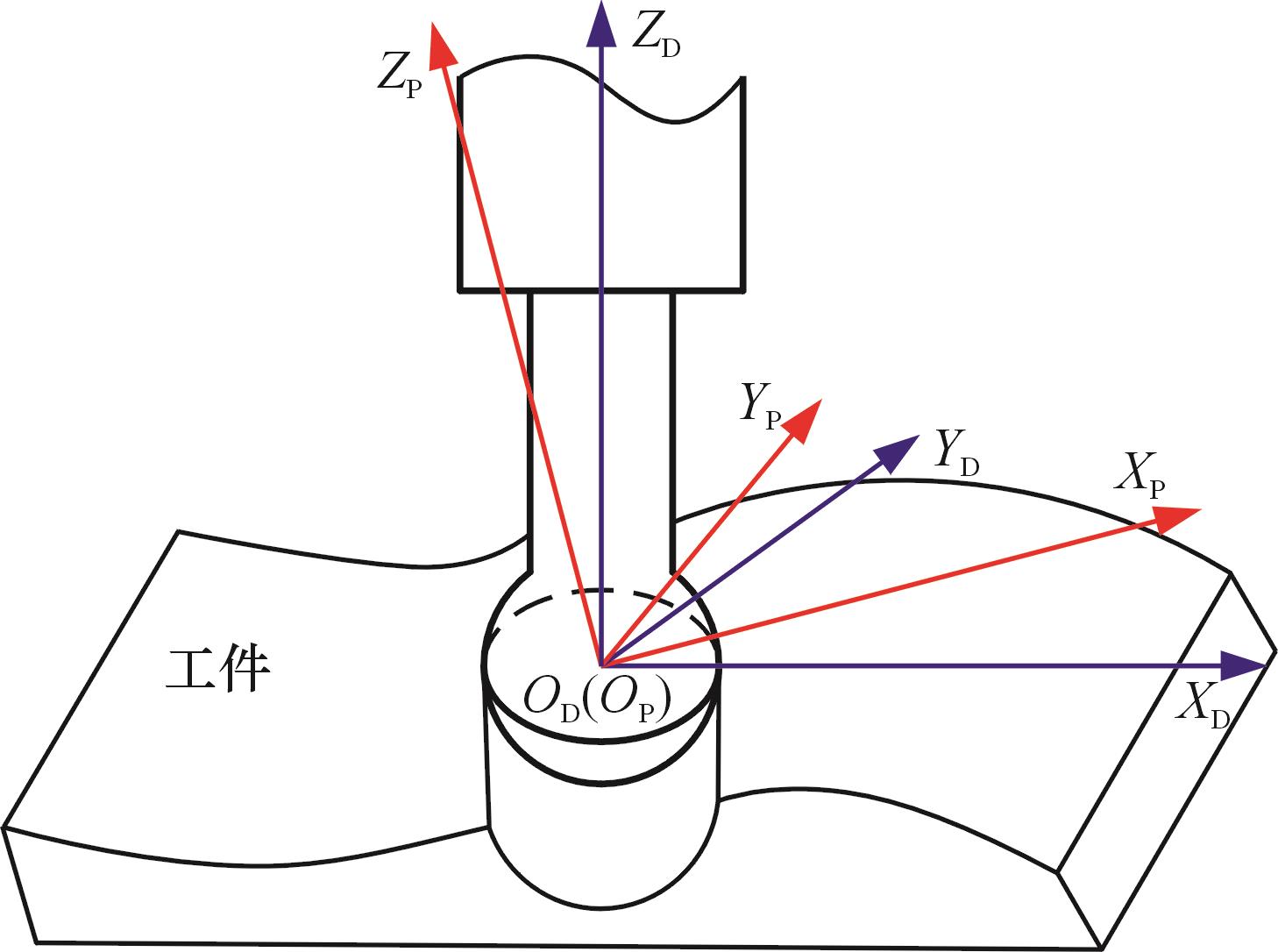
Fig.5 Transformation from the end Cartesian coordinate system to the decoupled coordinate system
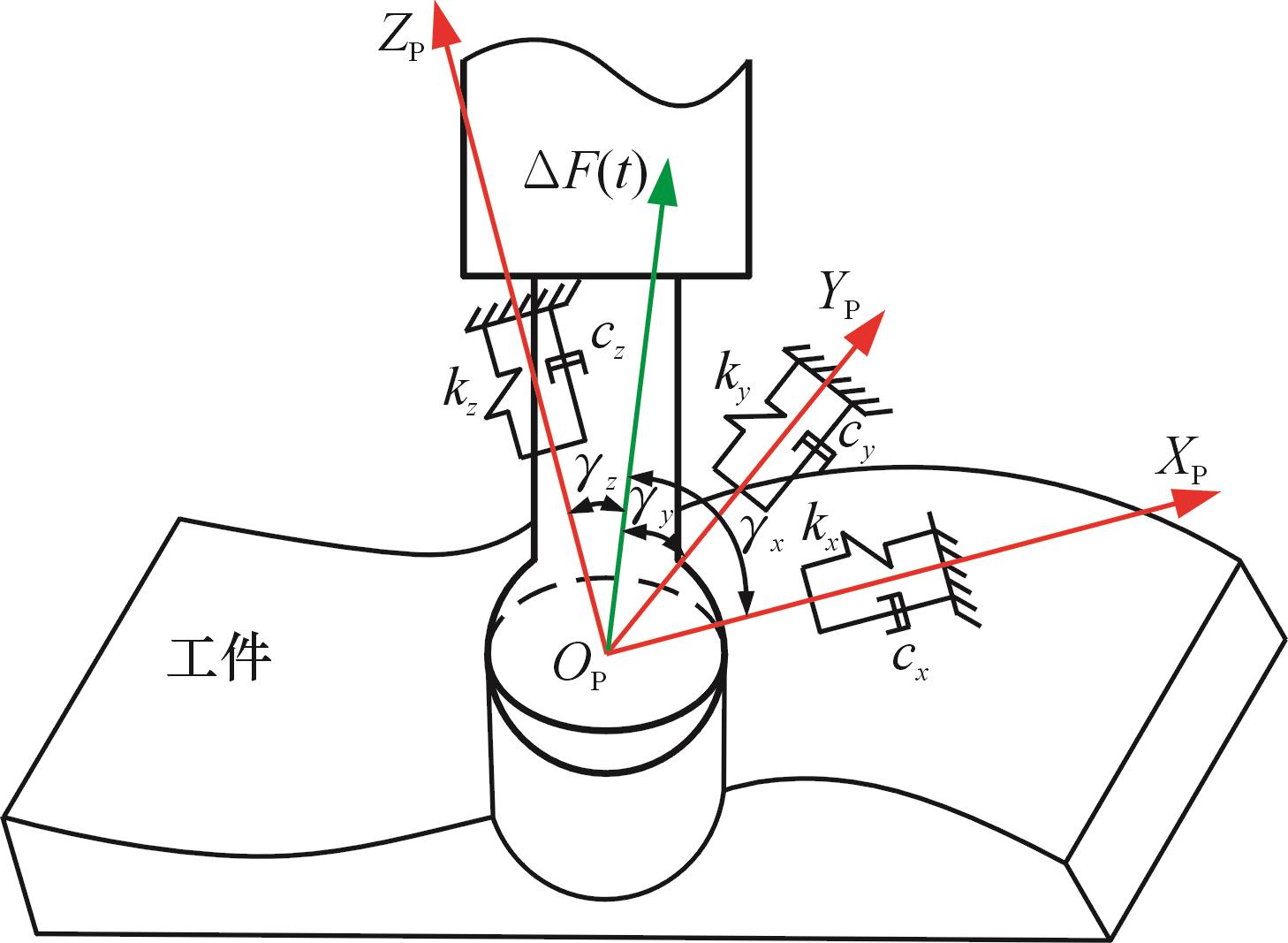
Fig.6 Dynamic model of regenerative chatter
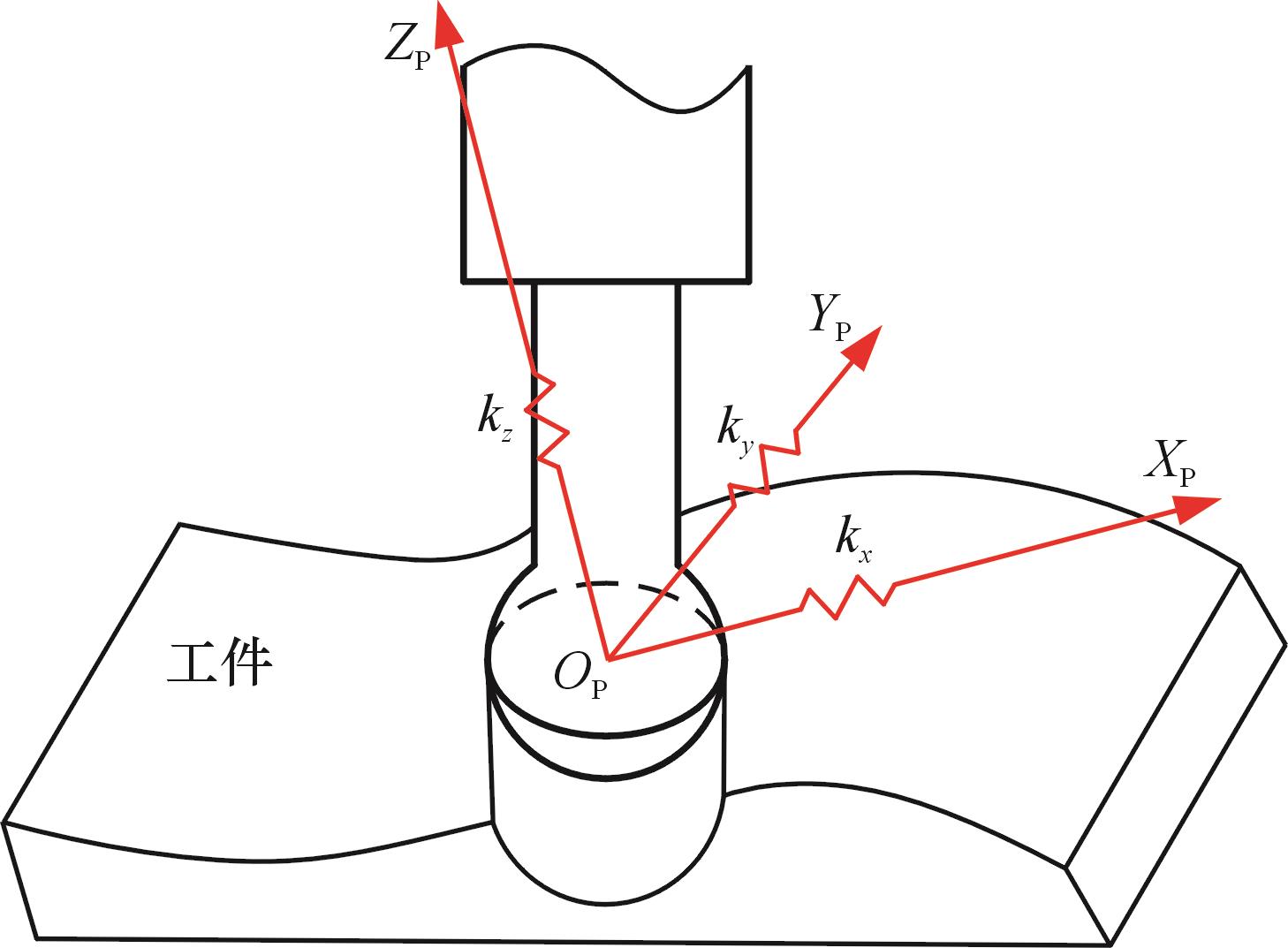
Fig.7 Dynamic model of mode coupling chatter
Tab. 2 Robot orientation sequence
Tab.3 Results of robot joint stiffness identification[14]
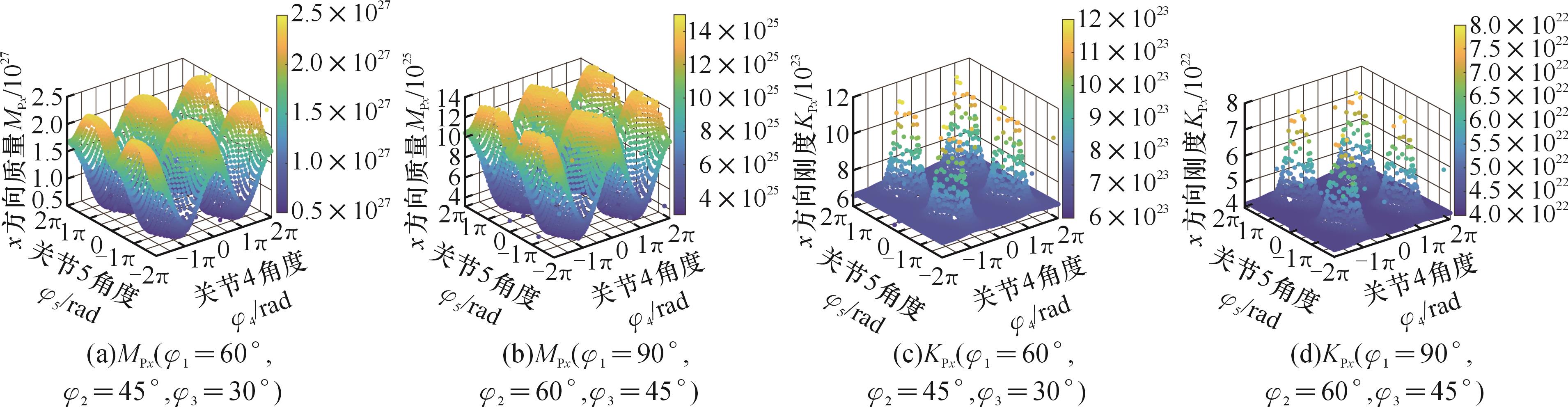
Fig.8 Distribution maps of MPx and KPx under different positions and orientations
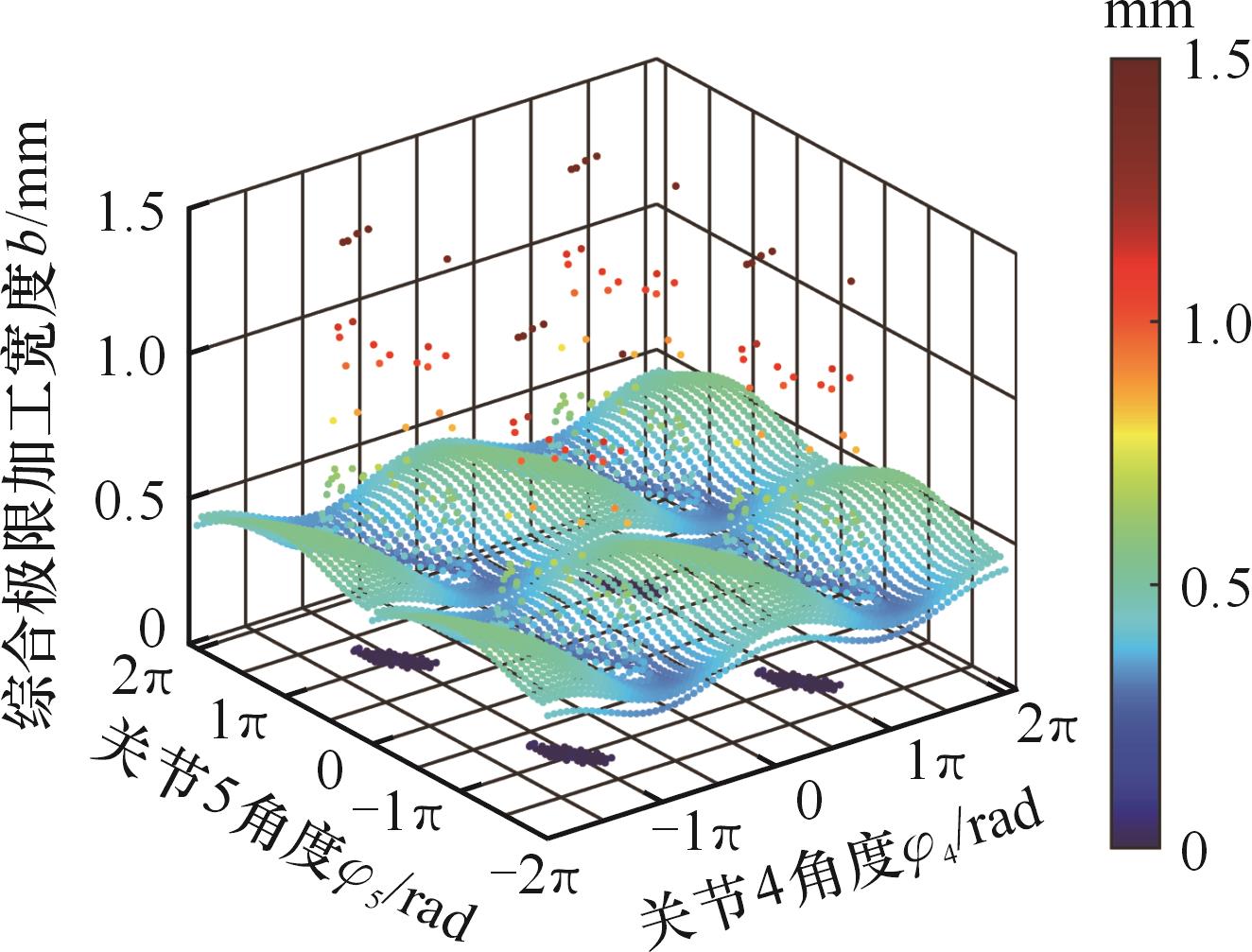
Fig.9 Comprehensive limit machining width variation
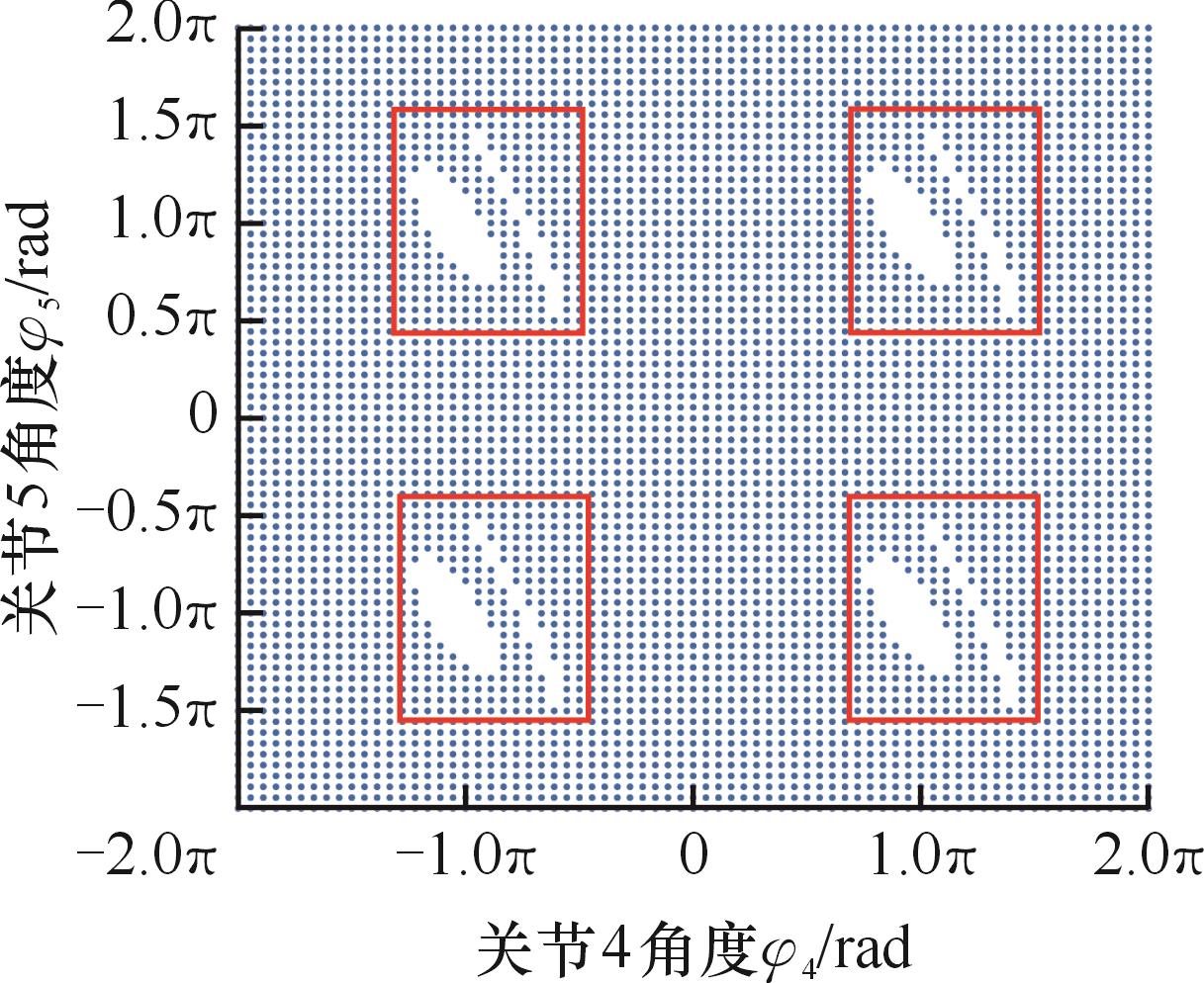
Fig.10 Stable operational points without regenerative chatter
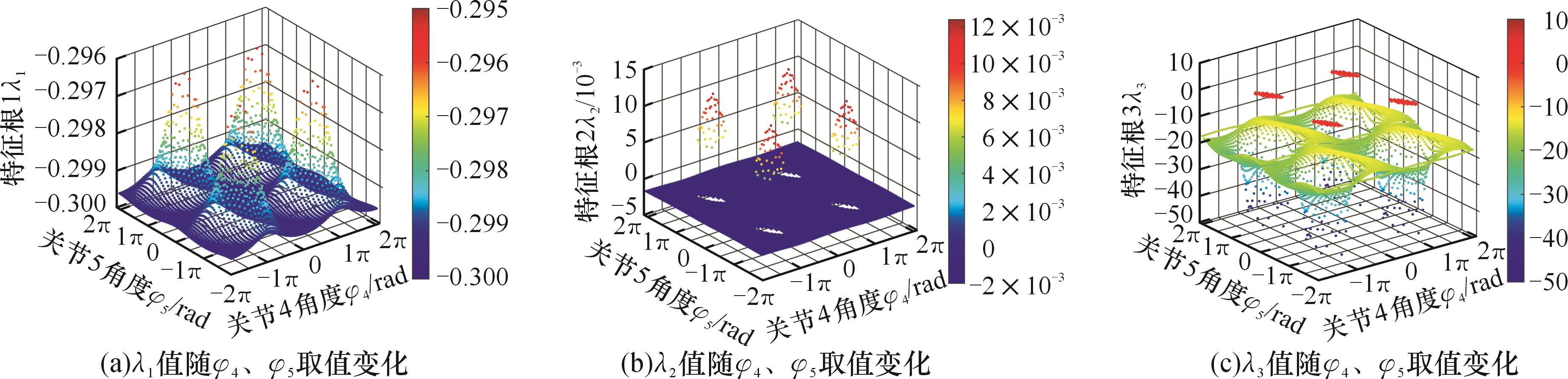
Fig.11 Distribution of feature root values with orientation changes
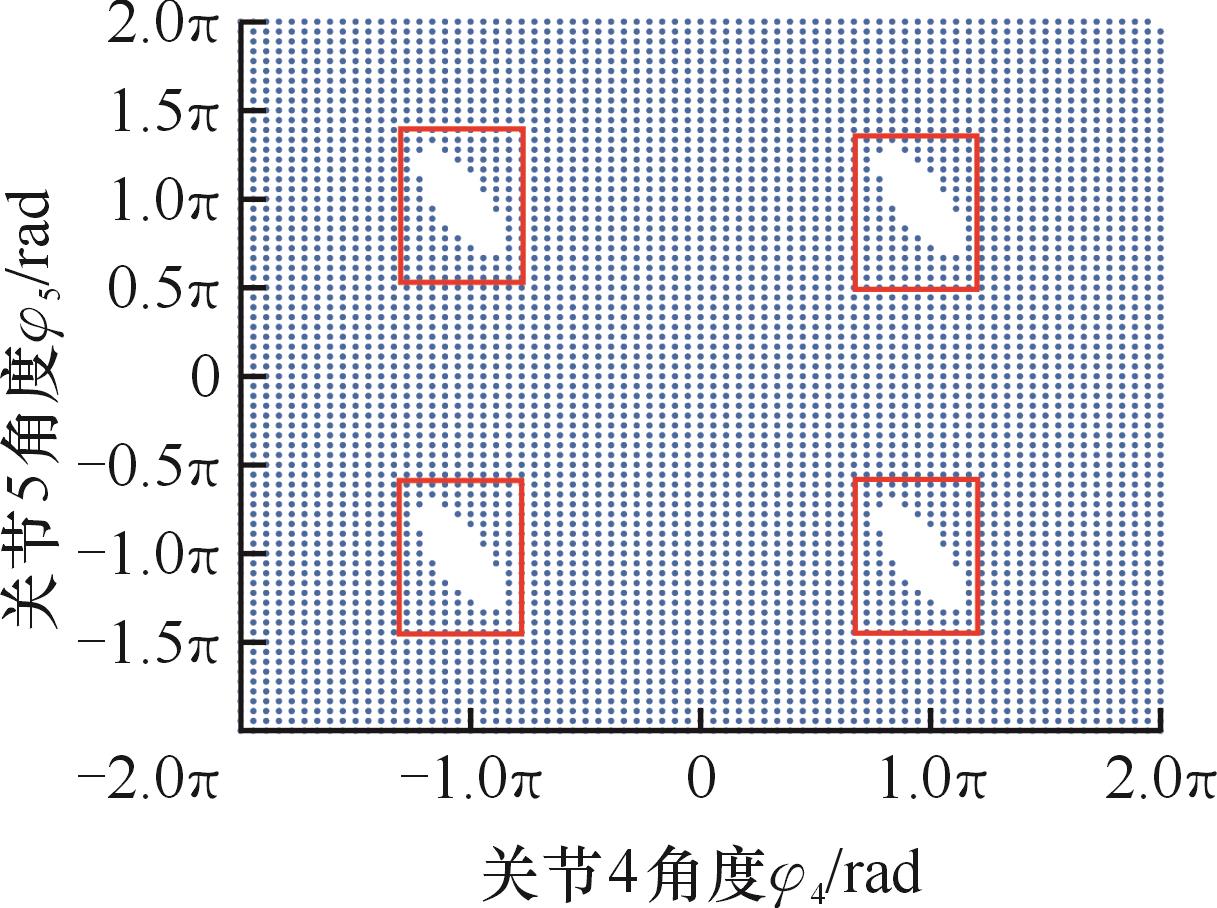
Fig.12 Stable operating point without coupled chatter
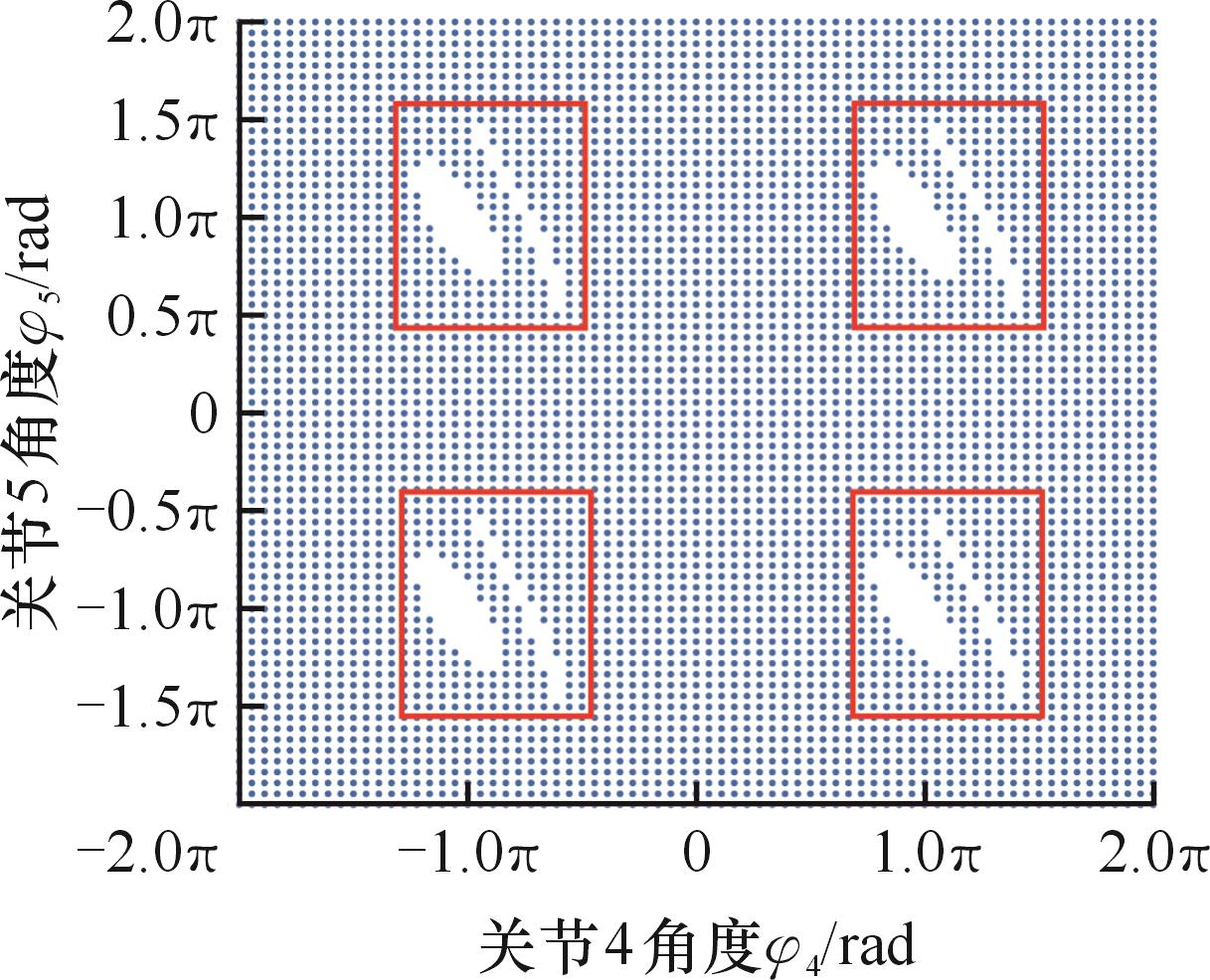
Fig.13 Stable operating point where neither type of chatter occurs
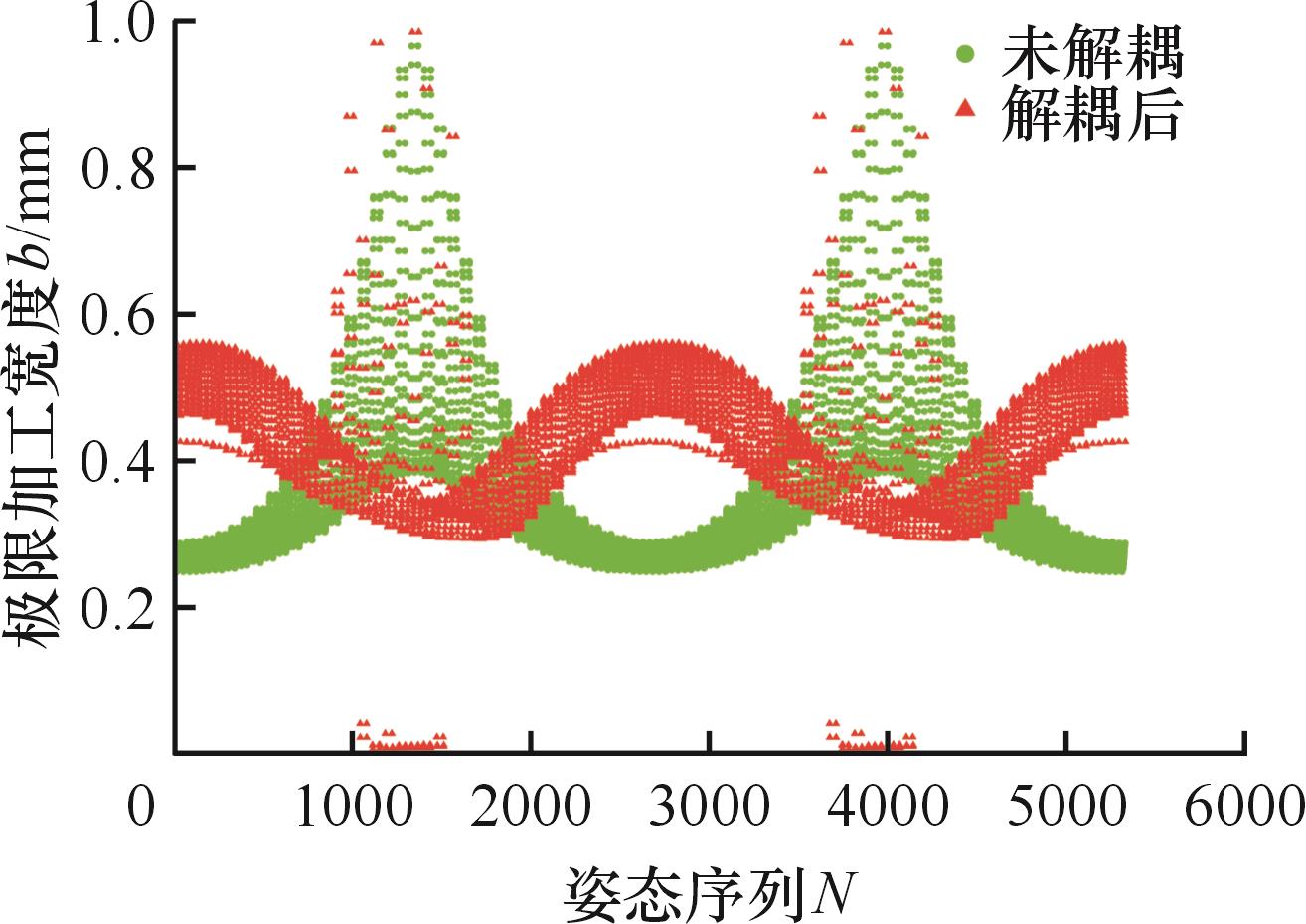
Fig.14 Limit machining width distribution
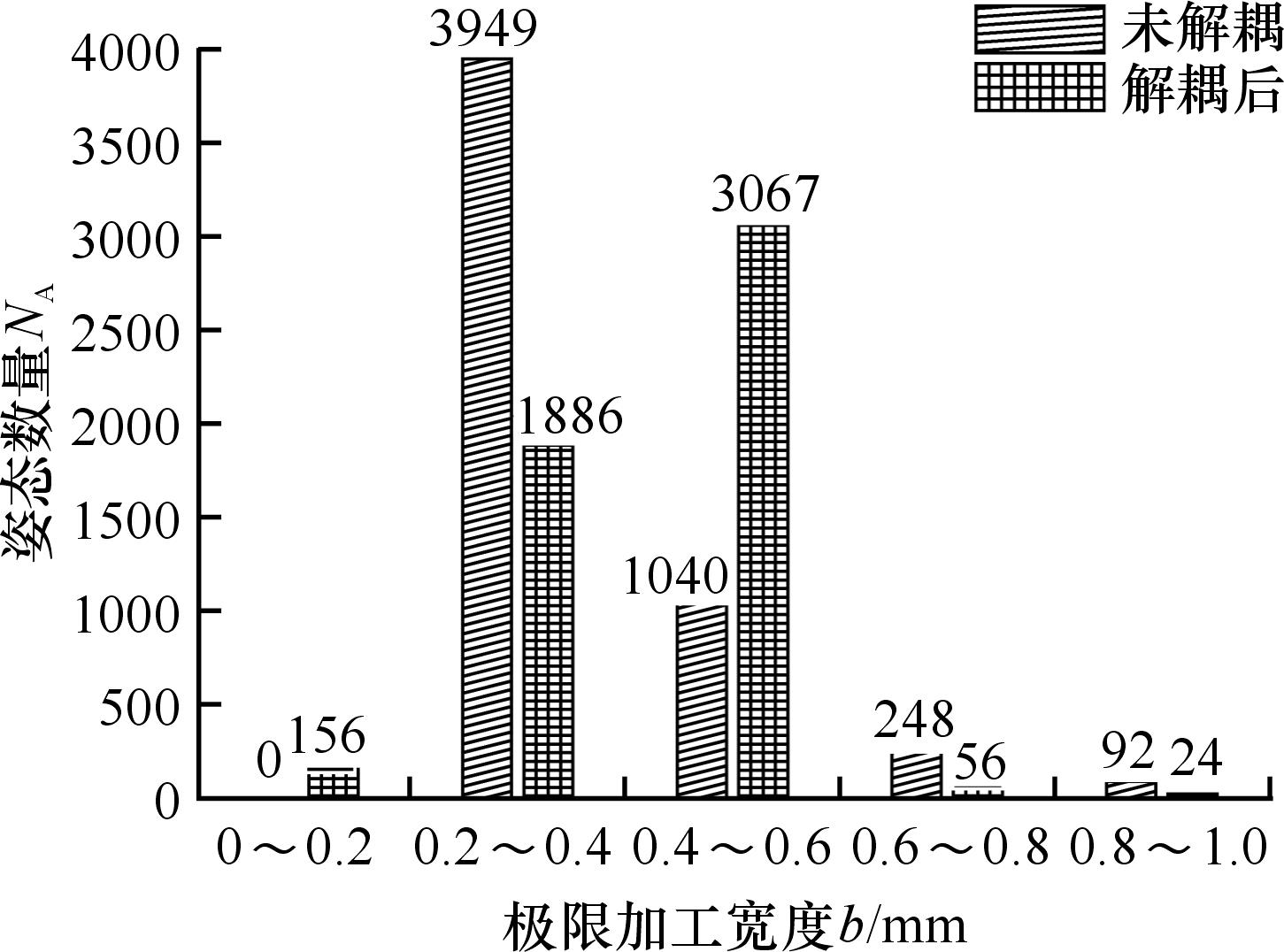
Fig.15 Statistics of limit machining width
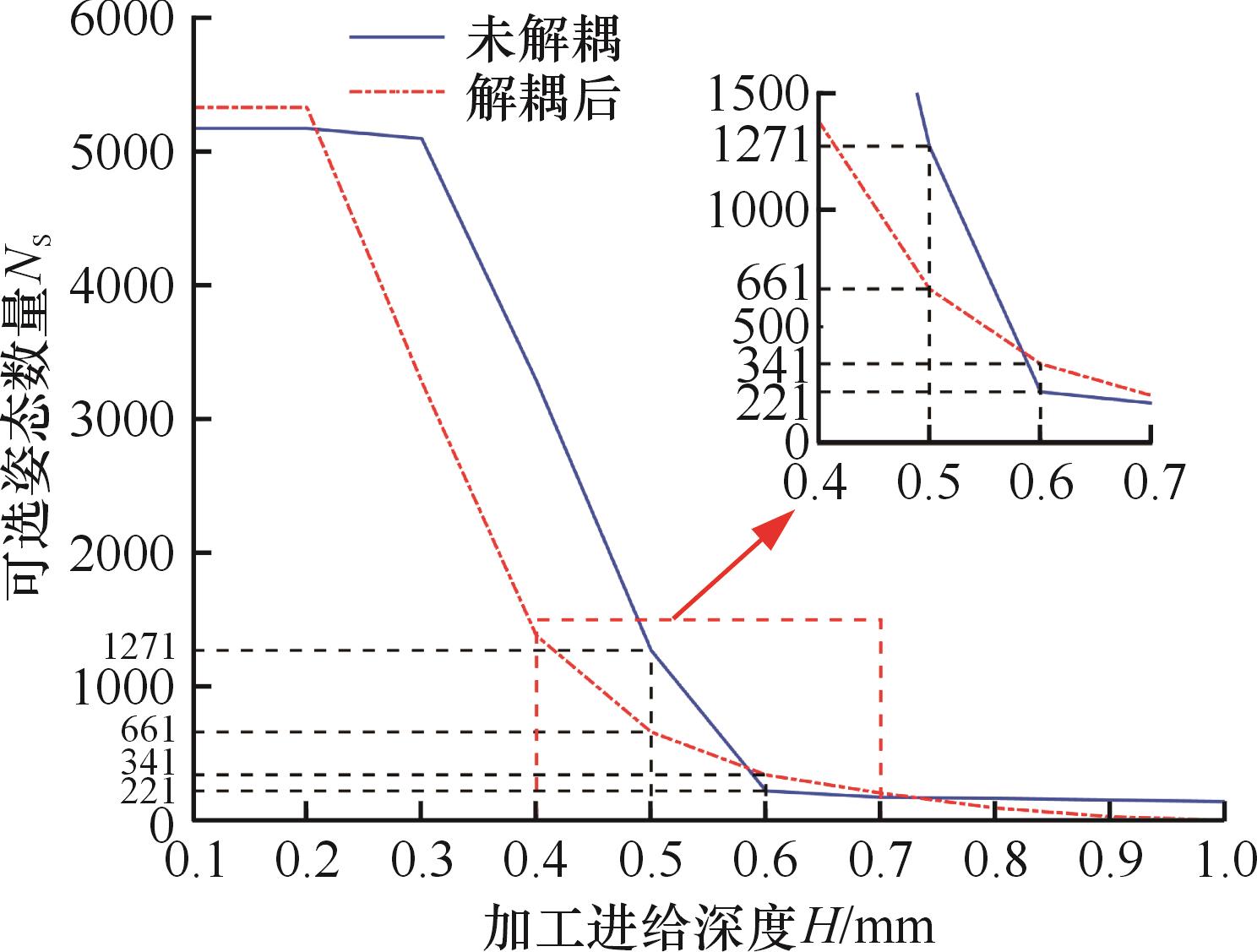
Fig.16 Number of optional orientations without regenerative chatter at different comprehensive feed depths
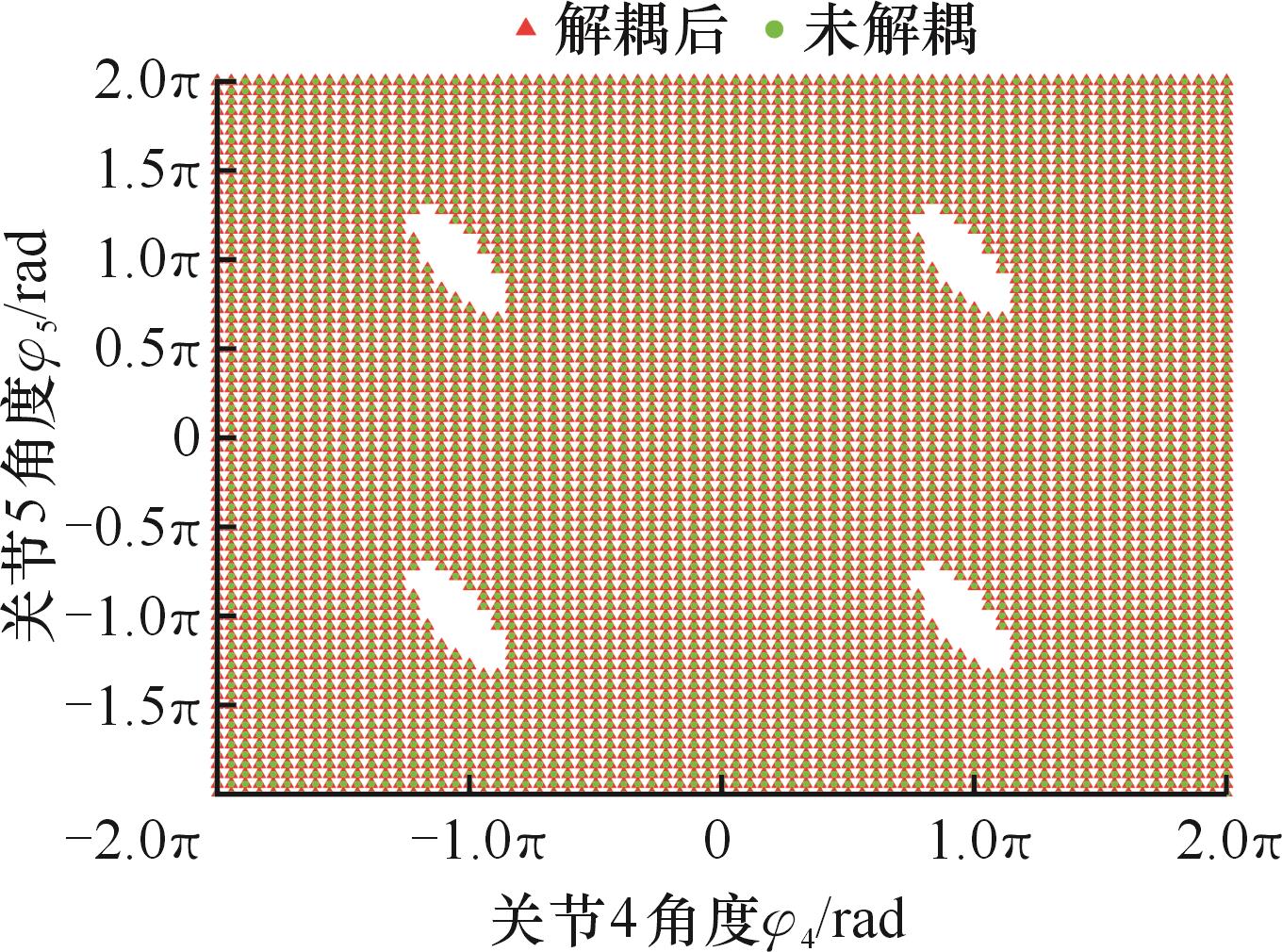
Fig.17 Optional orientations without coupled chatter
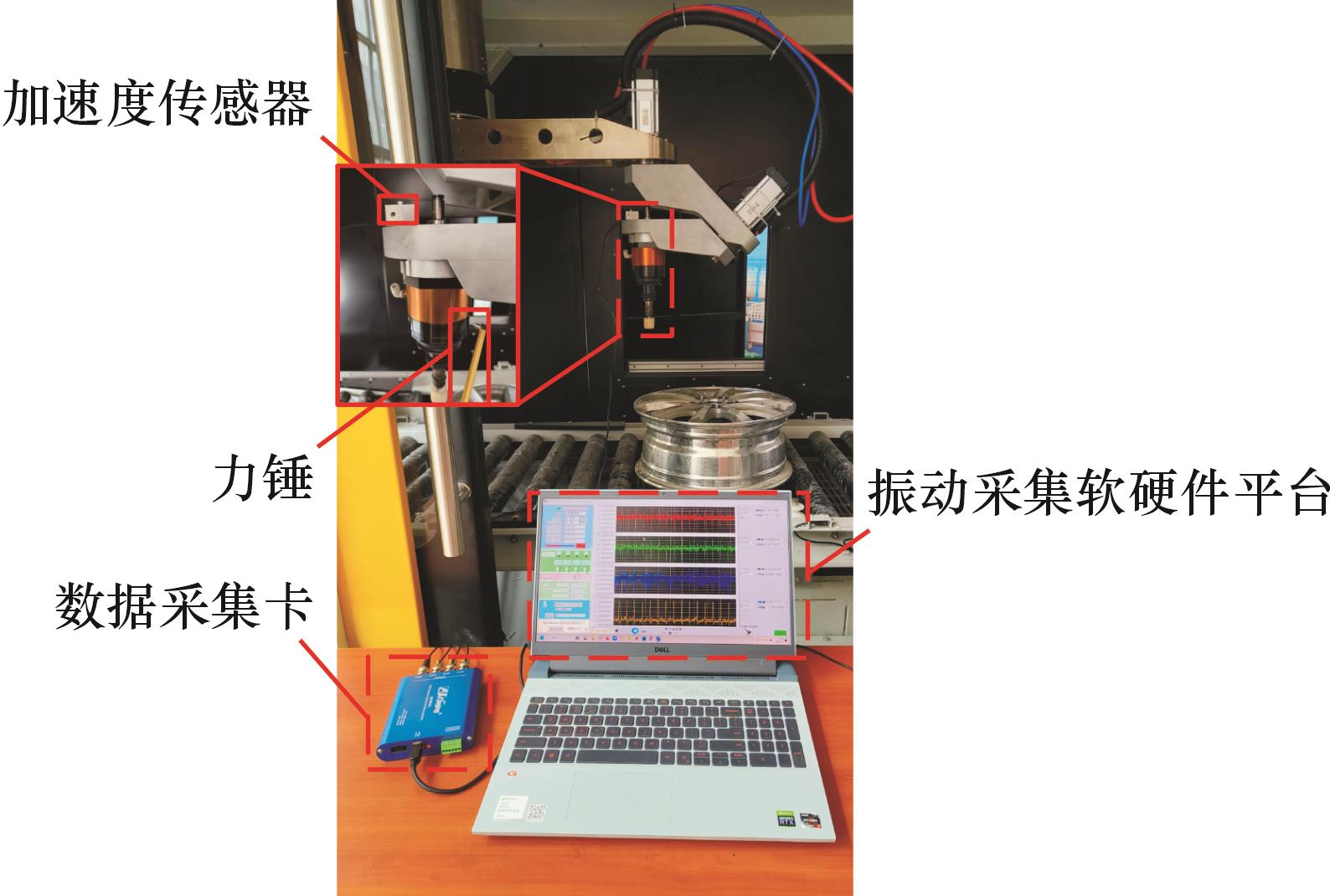
Fig.18 Robot hammering experiment platform
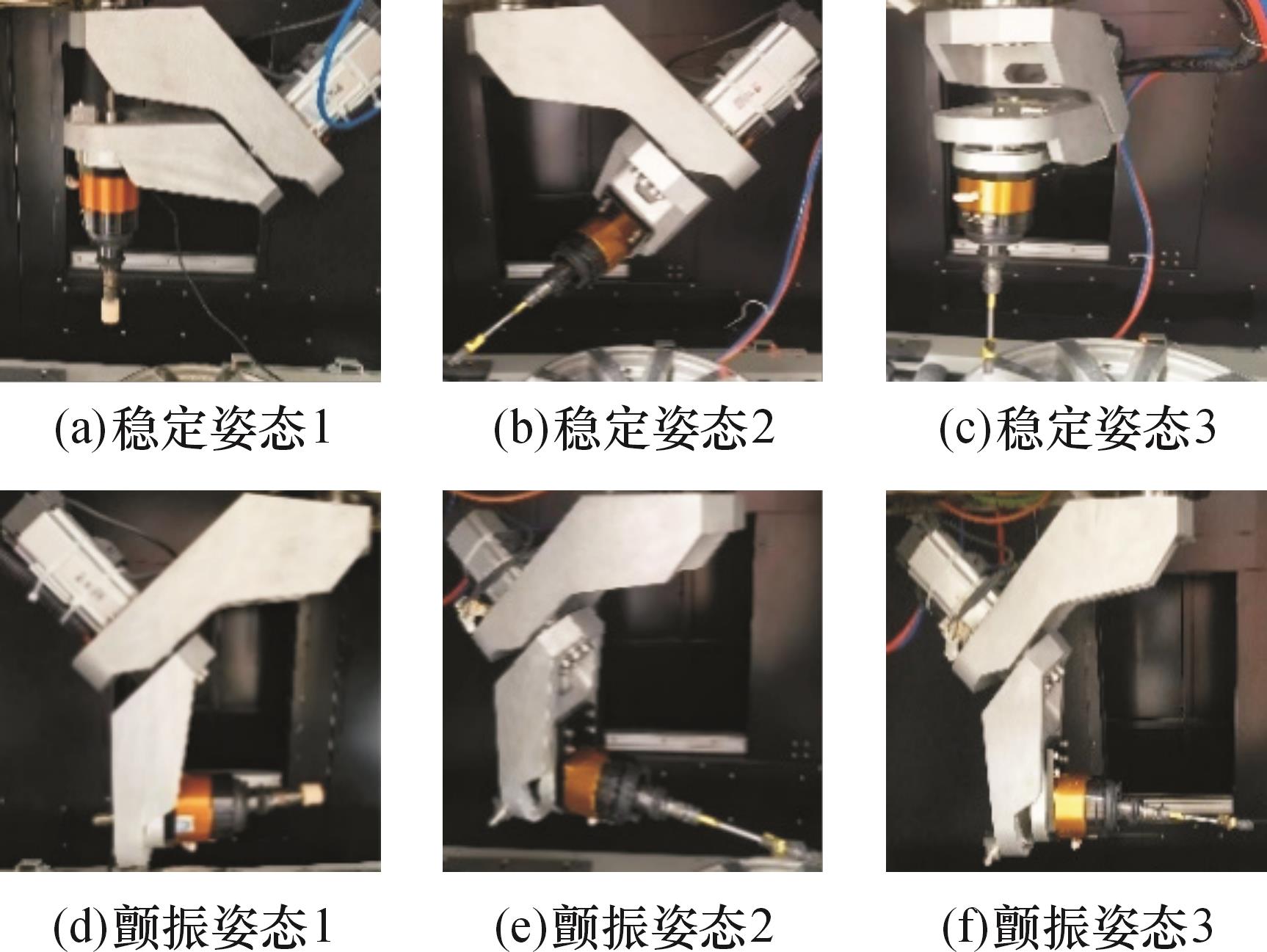
Fig.19 Stable and chatter orientations in hammering experiments
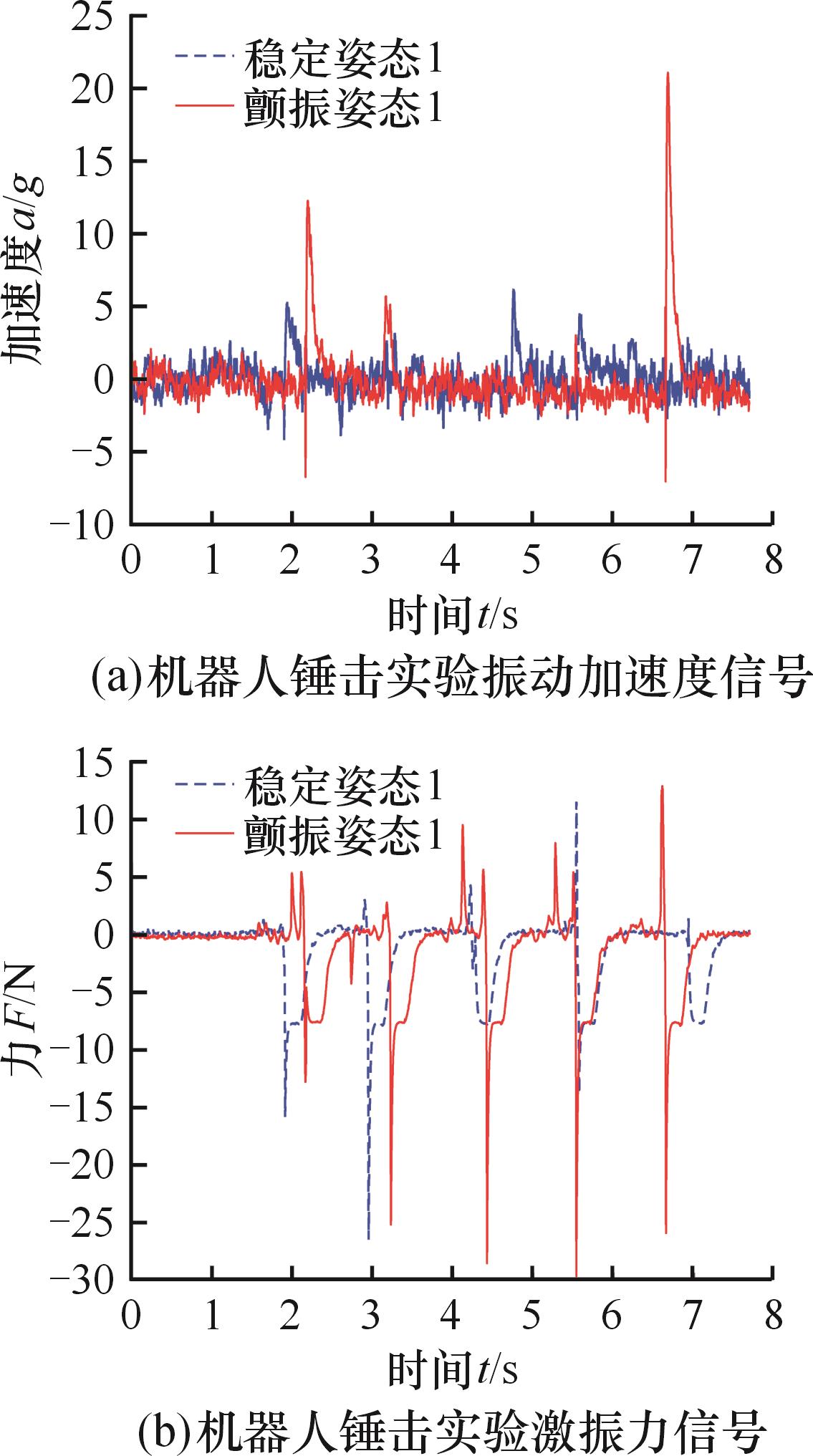
Fig.20 Vibration acceleration signals and excitation force signals from a robot impact experiment
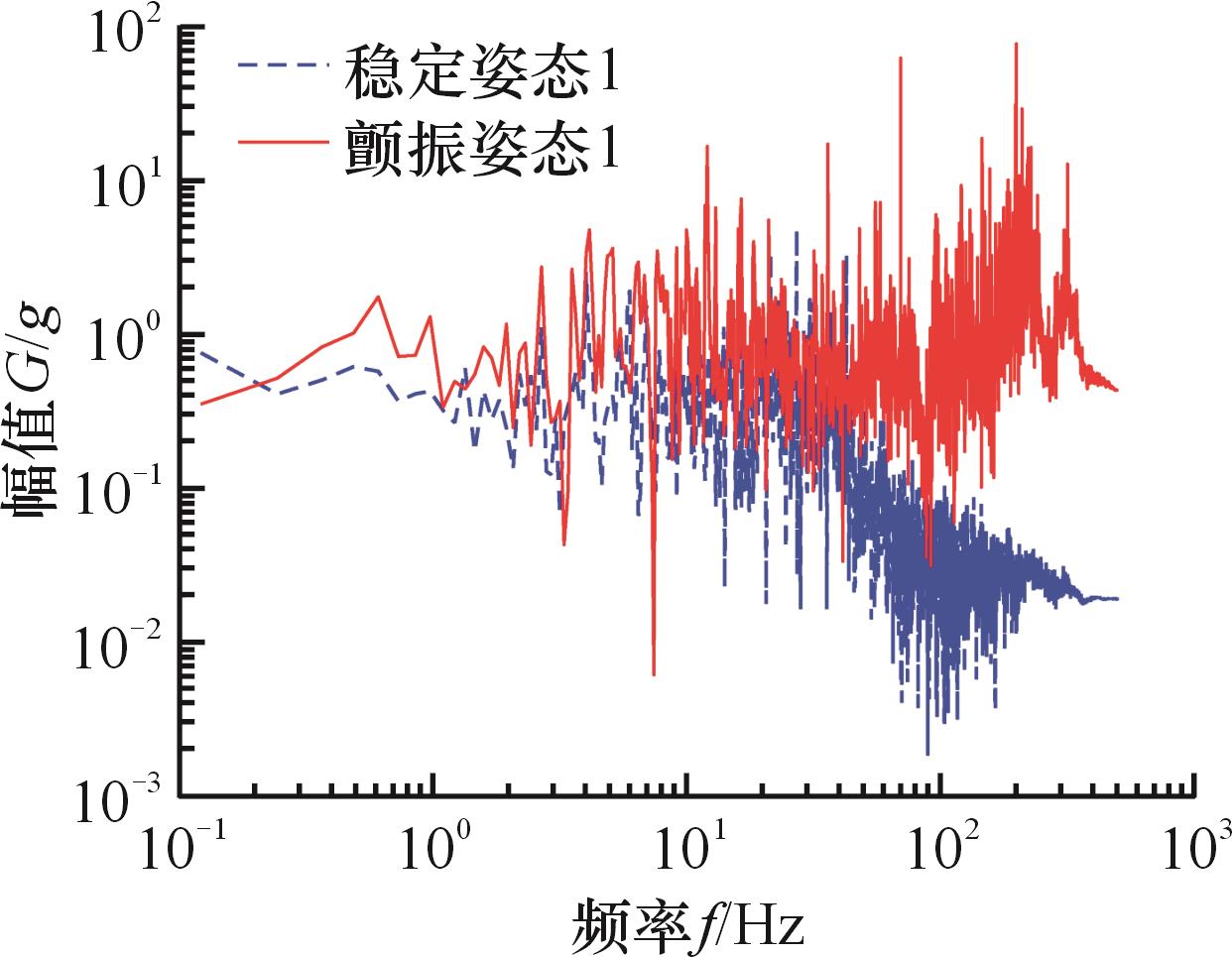
Fig.21 Frequency response function curve
| 姿态种类 | 姿态取值/rad | 频率响应 幅值/g | 频率响应 均值/g |
|---|---|---|---|
| 稳定姿态1 | 4.839 | 0.064 | |
| 稳定姿态2 | 6.581 | 0.251 | |
| 稳定姿态3 | 2.857 | 0.820 | |
| 颤振姿态1 | 77.063 | 1.176 | |
| 颤振姿态2 | 61.471 | 0.972 | |
| 颤振姿态3 | 22.221 | 1.061 |
Tab. 4 Hammering experiment results
| 姿态种类 | 姿态取值/rad | 频率响应 幅值/g | 频率响应 均值/g |
|---|---|---|---|
| 稳定姿态1 | 4.839 | 0.064 | |
| 稳定姿态2 | 6.581 | 0.251 | |
| 稳定姿态3 | 2.857 | 0.820 | |
| 颤振姿态1 | 77.063 | 1.176 | |
| 颤振姿态2 | 61.471 | 0.972 | |
| 颤振姿态3 | 22.221 | 1.061 |
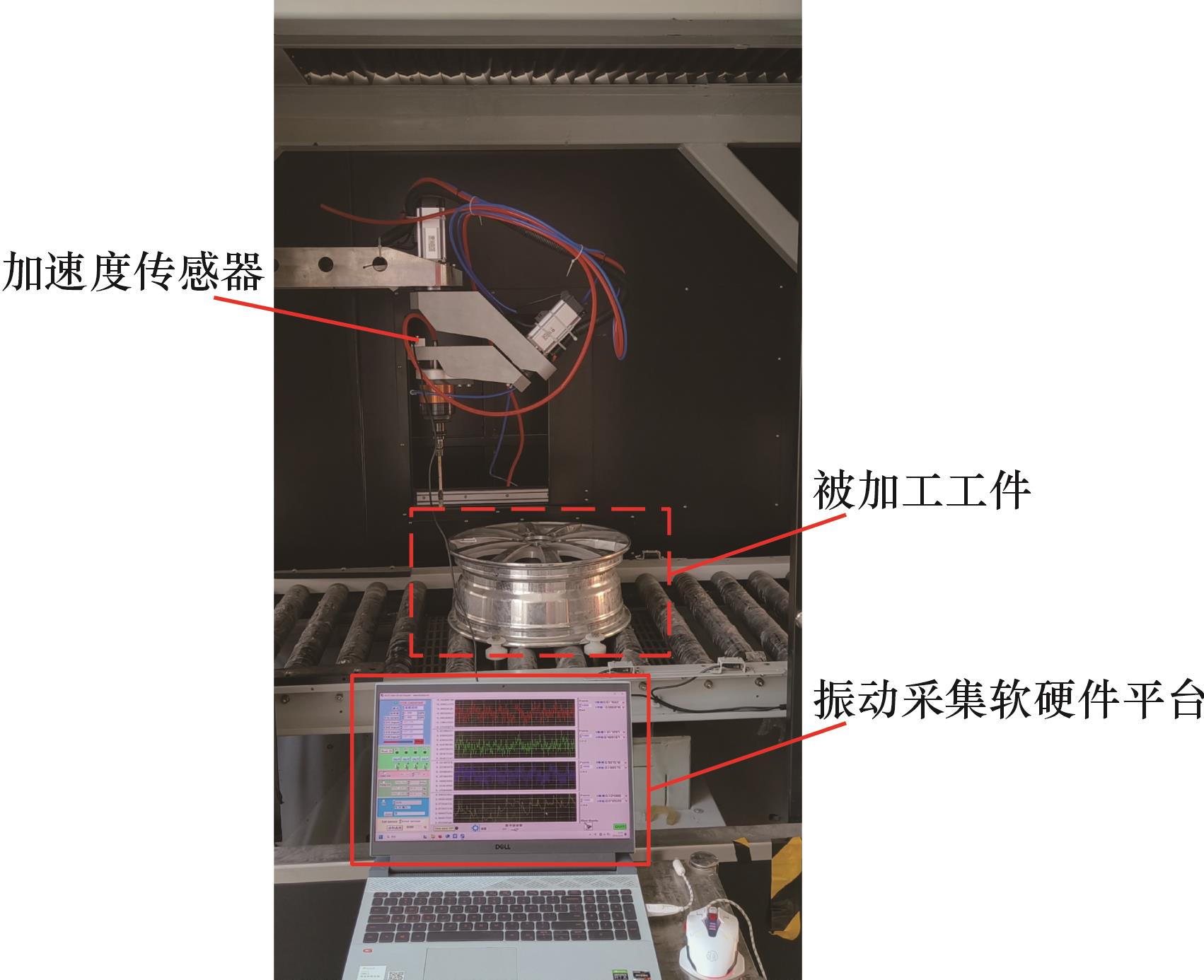
Fig.22 Chatter avoidance experimental platform for robot machining conditions
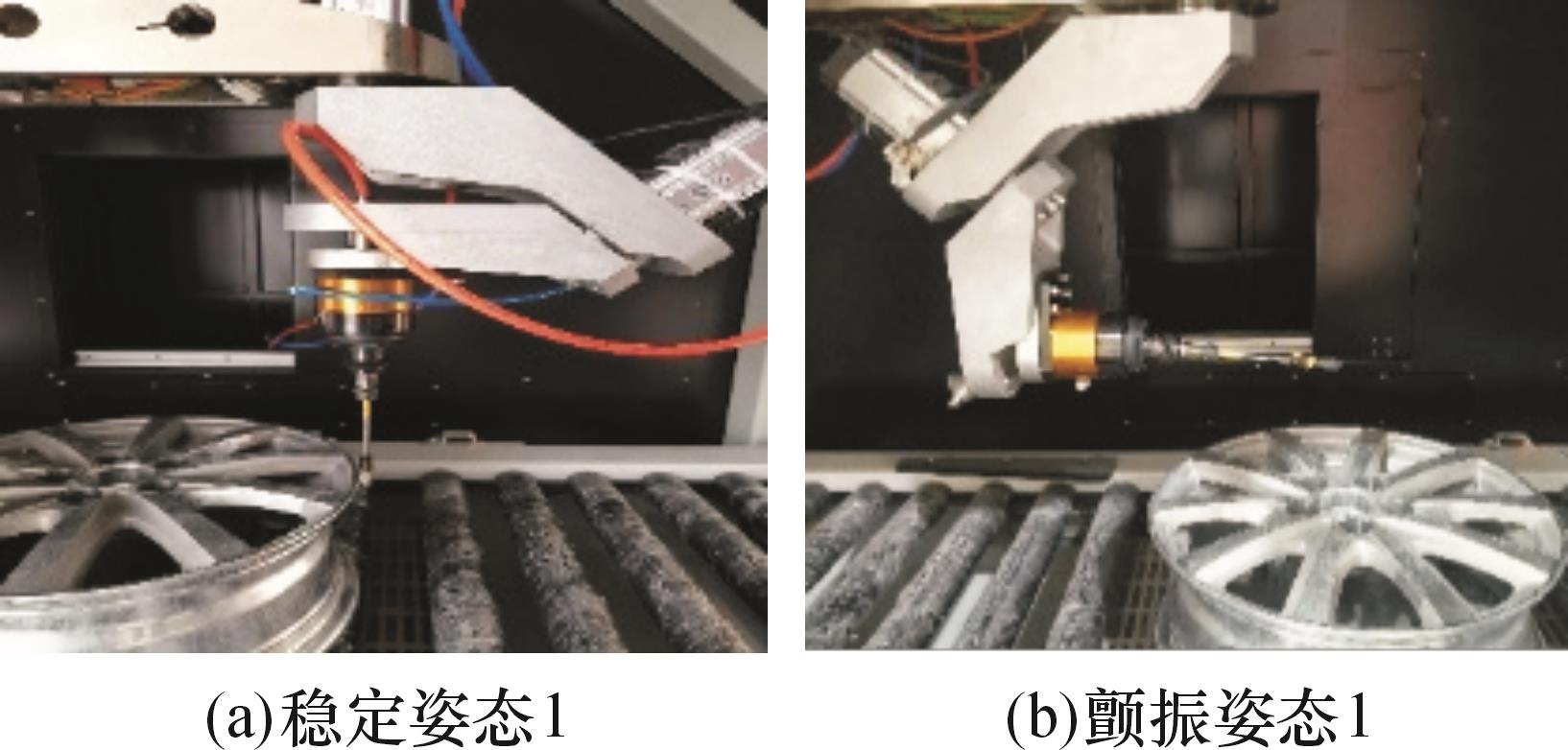
Fig.23 Stable orientation 1 and chatter orientation 1 in robot machining experiments
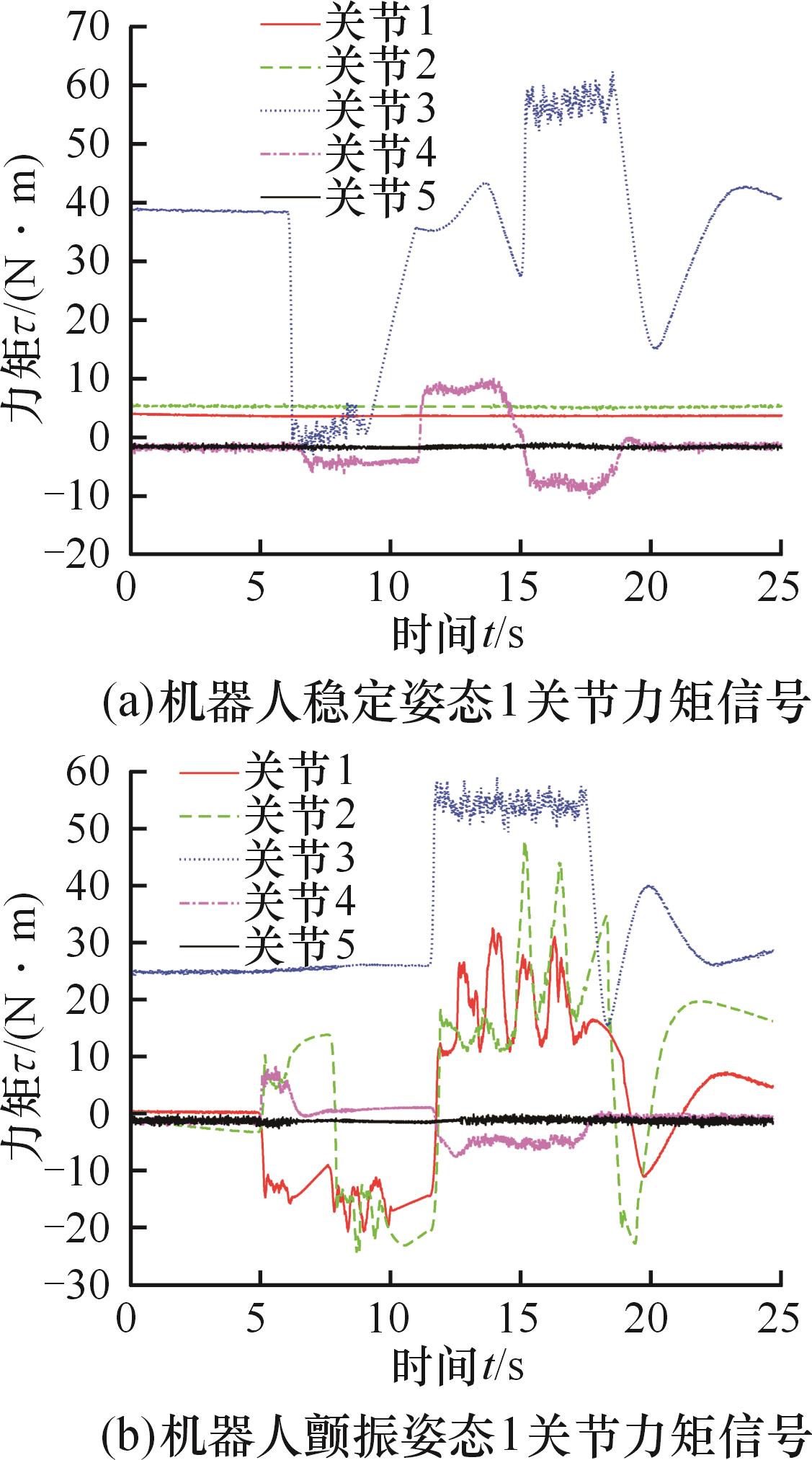
Fig.24 Joint torque signals collected from the stable orientation and the chatter orientation
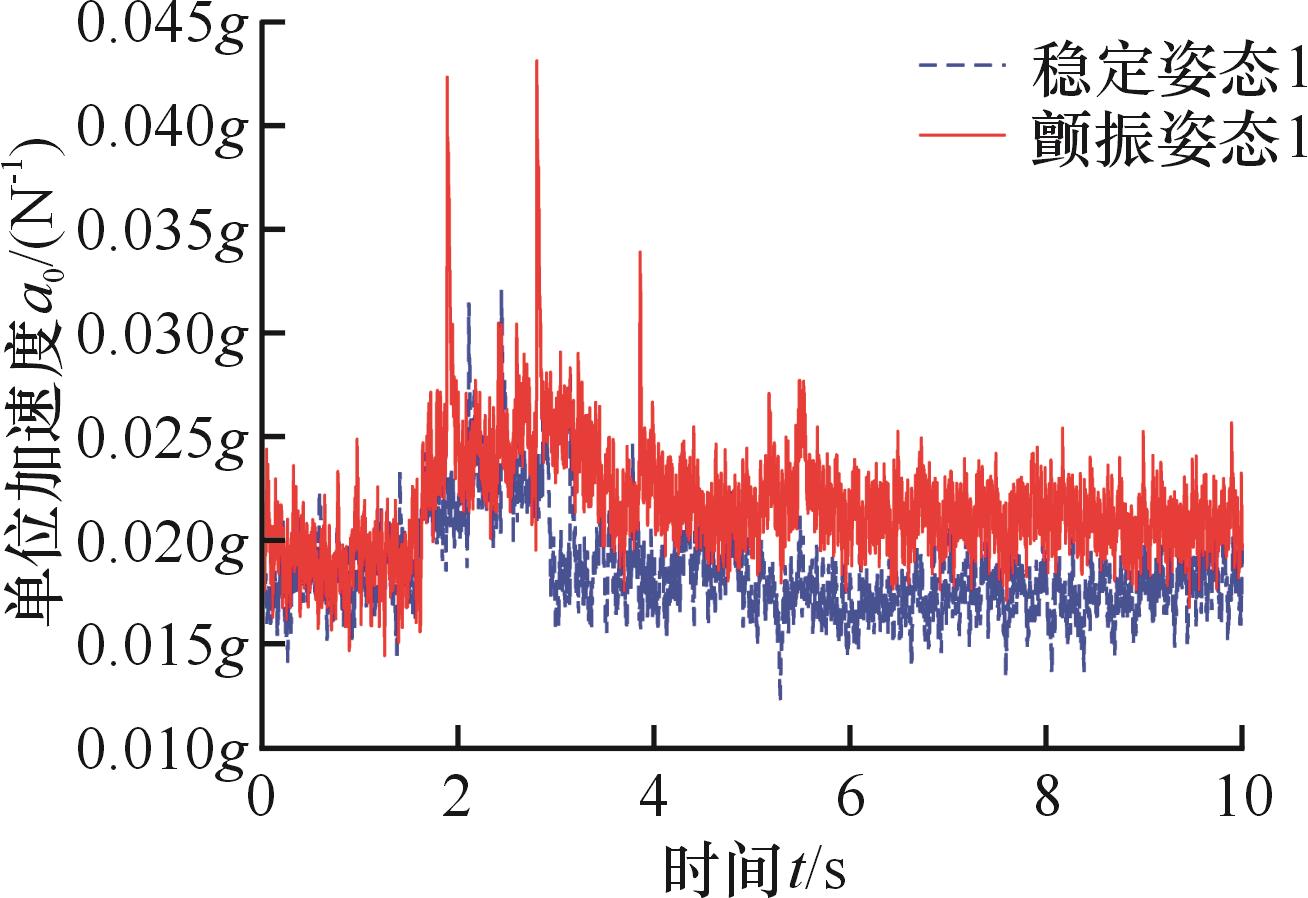
Fig.25 Acceleration signal under unit force acting on robot
| 姿态种类 | 姿态取值/rad | 单位加速度幅值 | 单位加速度均值 |
|---|---|---|---|
| 稳定姿态1 | 0.032g/N | 0.023g/N | |
| 稳定姿态2 | 0.029g/N | 0.010g/N | |
| 稳定姿态3 | 0.018g/N | 0.024g/N | |
| 颤振姿态1 | 0.043g/N | 0.025g/N | |
| 颤振姿态2 | 0.093g/N | 0.086g/N | |
| 颤振姿态3 | 0.047g/N | 0.026g/N |
Tab. 5 Chatter avoidance experiment results
| 姿态种类 | 姿态取值/rad | 单位加速度幅值 | 单位加速度均值 |
|---|---|---|---|
| 稳定姿态1 | 0.032g/N | 0.023g/N | |
| 稳定姿态2 | 0.029g/N | 0.010g/N | |
| 稳定姿态3 | 0.018g/N | 0.024g/N | |
| 颤振姿态1 | 0.043g/N | 0.025g/N | |
| 颤振姿态2 | 0.093g/N | 0.086g/N | |
| 颤振姿态3 | 0.047g/N | 0.026g/N |
| [1] | 李振, 赵欢, 王辉, 等. 机器人磨抛加工接触稳态自适应力跟踪研究[J]. 机械工程学报, 2022, 58(9):200-209. |
| LI Zhen, ZHAO Huan, WANG Hui, et al. Research on Contact Steady-state Adaptive Force Tracking of Robot Grinding and Polishing[J]. Journal of Mechanical Engineering, 2022, 58(9):200-209. | |
| [2] | 孙朝阳, 彭芳瑜, 唐小卫, 等. 基于自适应变分模态分解与功率谱熵差的机器人铣削加工颤振类型辨识[J]. 机械工程学报, 2023, 59(9):90-100. |
| SUN Zhaoyang, PENG Fangyu, TANG Xiaowei, et al. Robotic Milling Chatter Types Detection Based on Adaptive Variational Mode Decomposition and Difference of Power Spectral Entropy[J]. Journal of Mechanical Engineering, 2023, 59(9):90-100. | |
| [3] | 叶松涛, 严思杰, 李文韬, 等. 面向机器人铣削加工的刀尖动态特性分析与稳定性预测[J]. 机械工程学报, 2022, 58(17):261-275. |
| YE Songtao, YAN Sijie, LI Wentao, et al. Analysis of Tool Tip Dynamic Characteristics and Stability Prediction for Robotic Milling Tasks[J]. Journal of Mechanical Engineering, 2022, 58(17):261-275. | |
| [4] | WU Jiawei, TANG Xiaowei, PENG Fangyu, et al. A Novel Mode Coupling Mechanism for Predicting Low-frequency Chatter in Robotic Milling by Providing a Vibration Feedback Perspective[J]. Mechanical Systems and Signal Processing, 2024, 216:111424. |
| [5] | YANG Yun, YUAN Jiawei, Duo TIE, et al. An Efficient and Accurate Chatter Prediction Method of Milling Processes with a Transition Matrix Reduction Scheme[J]. Mechanical Systems and Signal Processing, 2023, 182:109535. |
| [6] | WANG Yu, ZHANG Mingkai, TANG Xiaowei, et al. A kMap Optimized VMD-SVM Model for Milling Chatter Detection with an Industrial Robot[J]. Journal of Intelligent Manufacturing, 2022, 33(5):1483-1502. |
| [7] | YANG Bin, GUO Kai, ZHOU Qian, et al. Early Chatter Detection in Robotic Milling under Variable Robot Postures and Cutting Parameters[J]. Mechanical Systems and Signal Processing, 2023, 186:109860. |
| [8] | 梁志强, 陈司晨, 杜宇超, 等. 基于变分模态滤波和注意力机制的重载机器人铣削系统颤振辨识方法[J]. 中国机械工程, 2025, 36(5):1018-1027. |
| LIANG Zhiqiang, CHEN Sichen, DU Yuchao, et al. Chatter Identification Method for Heavy-duty Robotic Milling Systems Based on Variational Mode Filtering and Attention Mechanism[J]. China Mechanical Engineering, 2025, 36(5):1018-1027. | |
| [9] | ZHAO Wei, LI Bo, TIAN Wei, et al. Magnetorheological Elastomer Absorber-based Chatter Suppression in Robotic Milling[J]. Robotics and Computer-Integrated Manufacturing, 2024, 88:102740. |
| [10] | TAKAHASHI W, SUZUKI N, SHAMOTO E. Development of a Novel Boring Tool with Anisotropic Dynamic Stiffness to Avoid Chatter Vibration in Cutting Part 1: Design of Anisotropic Structure to Attain Infinite Dynamic Stiffness[J]. Precision Engineering, 2021, 68:57-71. |
| [11] | 郭万金. 复杂形状零部件打磨作业机器人研究[D]. 哈尔滨:哈尔滨工业大学, 2017. |
| GUO Wanjin. Research on Robot Manipulator for Complex Shaped Parts Deburring[D]. Harbin:Harbin Institute of Technology, 2017. | |
| [12] | TLUSTY J, POLACEK M. The Stability of the Machine Tool against Self Excited Vibration in Machining[C]∥ Proceedings of International Research in Production Engineering. Pittsburgh, 1963:465-474. |
| [13] | MERRITT H E. Theory of Self-excited Machine-tool Chatter:Contribution to Machine-tool Chatter Research—1[J]. Journal of Engineering for Industry, 1965, 87(4):447-454. |
| [14] | 郭万金, 李儒, 王利斌, 等. 一种考虑弱刚性关节传动链结构和柔性杆结构的机器人刚度辨识方法[J]. 中国机械工程, 2025, 36(5):974-985. |
| GUO Wanjin, LI Ru, WANG Libin, et al. A Robot Stiffness Identification Method Considering Weakly Rigid Joint Transmission Chain Structures and Flexible Rod Structures[J]. China Mechanical Engineering, 2025, 36(5):974-985. | |
| [15] | 陈钦韬, 殷参, 张加波, 等. 面向铣削任务的工业机器人刚度位姿优化[J]. 机器人, 2021, 43(1):90-100. |
| CHEN Qintao, YIN Shen, ZHANG Jiabo, et al. Pose Optimization of Industrial Robots Based on Stiffness for Milling Tasks[J]. Robot, 2021, 43(1):90-100. | |
| [16] | 刘延柱, 陈立群, 陈文良. 振动力学[M]. 2版. 北京:高等教育出版社, 2011. |
| LIU Yanzhu, CHEN Liqun, CHEN Wenliang. Mechanics of Vibration[M]. 2nd ed. Beijing:Higher Education Press, 2011. | |
| [17] | ZHANG Yun, ZHOU Tingting, HU Tianliang, et al. Stability Analysis of Milling Chatter in Six-degree-of-freedom Industrial Robots[J]. The International Journal of Advanced Manufacturing Technology, 2023, 127(5):2861-2880. |
| [18] | JI Yongjian, WANG Liyong, SONG Yue, et al. Investigation of Robotic Milling Chatter Stability Prediction under Different Cutter Orientations by an Updated Full-discretization Method[J]. Journal of Sound and Vibration, 2022, 536:117150. |
| [19] | 廖文和, 郑侃, 孙连军, 等. 大型复杂构件机器人加工稳定性研究进展[J]. 航空学报, 2022, 43(1):026061. |
| LIAO Wenhe, ZHENG Kan, SUN Lianjun, et al. Review on Chatter Stability in Robotic Machining for Large Complex Components[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(1):026061. | |
| [20] | OZAKI N, TANIGUCHI T, HIROGAKI T, et al. Elucidation of the Mechanism of Chatter Mark Formation during End-milling and Inverse Analysis of Chatter Vibration by Two-dimensional Discrete Fourier Transform of Chatter Mark[J]. Precision Engineering, 2023, 82:116-128. |
| [21] | MERCHANT M E. Basic Mechanics of the Metal-cutting Process[J]. Journal of Applied Mechanics, 1944, 11(3):A168-A175. |
| [1] | YANG Jing, ZHANG Xiaojian, WU YiYE Songtao, YAN Sijie, LU Jialin. Posture Optimization Based on Stiffness Orientation Method for Industrial Robotic Milling [J]. China Mechanical Engineering, 2022, 33(16): 1957-1964. |
| [2] | Huang Qiang,;Zhang Genbao;Zhang Xinyu;Cao Dongfeng. Research on Stability of Regenerative Chatter with Double Elastic Body [J]. J4, 2008, 19(21): 0-2524. |
| [3] | Song Qinghua;Ai Xing;Wan Yi;Pan Yongzhi. Stability Prediction for High-speed Milling Including Feed Rate in Low Radial Immersion [J]. J4, 2008, 19(10): 0-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||