

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (12): 2986-2992.DOI: 10.3969/j.issn.1004-132X.2025.12.022
Jiying TUO( ), Xiaonan XU, Jun LI, Yuchen ZHANG, An HUANG, Du HU, Zilin LIU()
), Xiaonan XU, Jun LI, Yuchen ZHANG, An HUANG, Du HU, Zilin LIU()
Received:2025-04-09
Online:2025-12-25
Published:2025-12-31
Contact:
Zilin LIU
妥吉英(), 徐笑南, 李俊, 张玉琛, 黄安, 胡都, 刘梓林()
通讯作者:
刘梓林
作者简介:妥吉英,男,1988年生,讲师、硕士研究生导师。研究方向为智能控制、非线性动力学。发表论文20余篇。E-mail:tjy@cqut.edu.cn。
基金资助:CLC Number:
Jiying TUO, Xiaonan XU, Jun LI, Yuchen ZHANG, An HUANG, Du HU, Zilin LIU. A Six-axis Robotic Arm Path Planning Based on Improved SAC Algorithm[J]. China Mechanical Engineering, 2025, 36(12): 2986-2992.
妥吉英, 徐笑南, 李俊, 张玉琛, 黄安, 胡都, 刘梓林. 一种基于改进SAC算法的六轴机械臂路径规划[J]. 中国机械工程, 2025, 36(12): 2986-2992.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.12.022
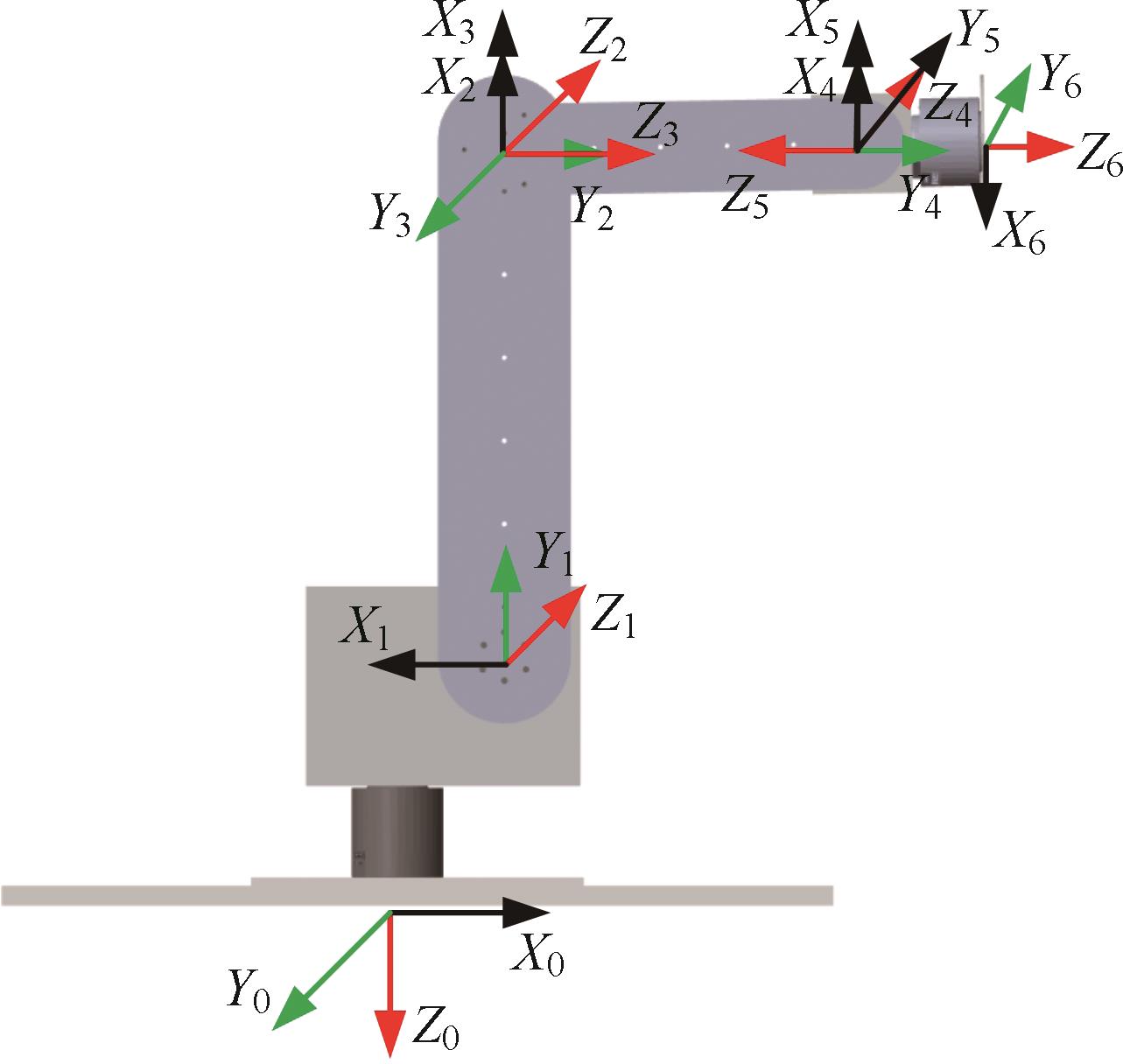
Fig.1 MDH parameter method
| 关节 | ||||
|---|---|---|---|---|
| 1 | 64.2 | 1.571 | 149.58 | 0 |
| 2 | 305 | 0 | 0 | |
| 3 | 0 | 1.571 | 0 | 3.142 |
| 4 | 0 | 213.91 | 0 | |
| 5 | 0 | 1.571 | 0 | 1.571 |
| 6 | 0 | 0 | 74.91 | 0 |
Tab.1 MDH parameter table
| 关节 | ||||
|---|---|---|---|---|
| 1 | 64.2 | 1.571 | 149.58 | 0 |
| 2 | 305 | 0 | 0 | |
| 3 | 0 | 1.571 | 0 | 3.142 |
| 4 | 0 | 213.91 | 0 | |
| 5 | 0 | 1.571 | 0 | 1.571 |
| 6 | 0 | 0 | 74.91 | 0 |
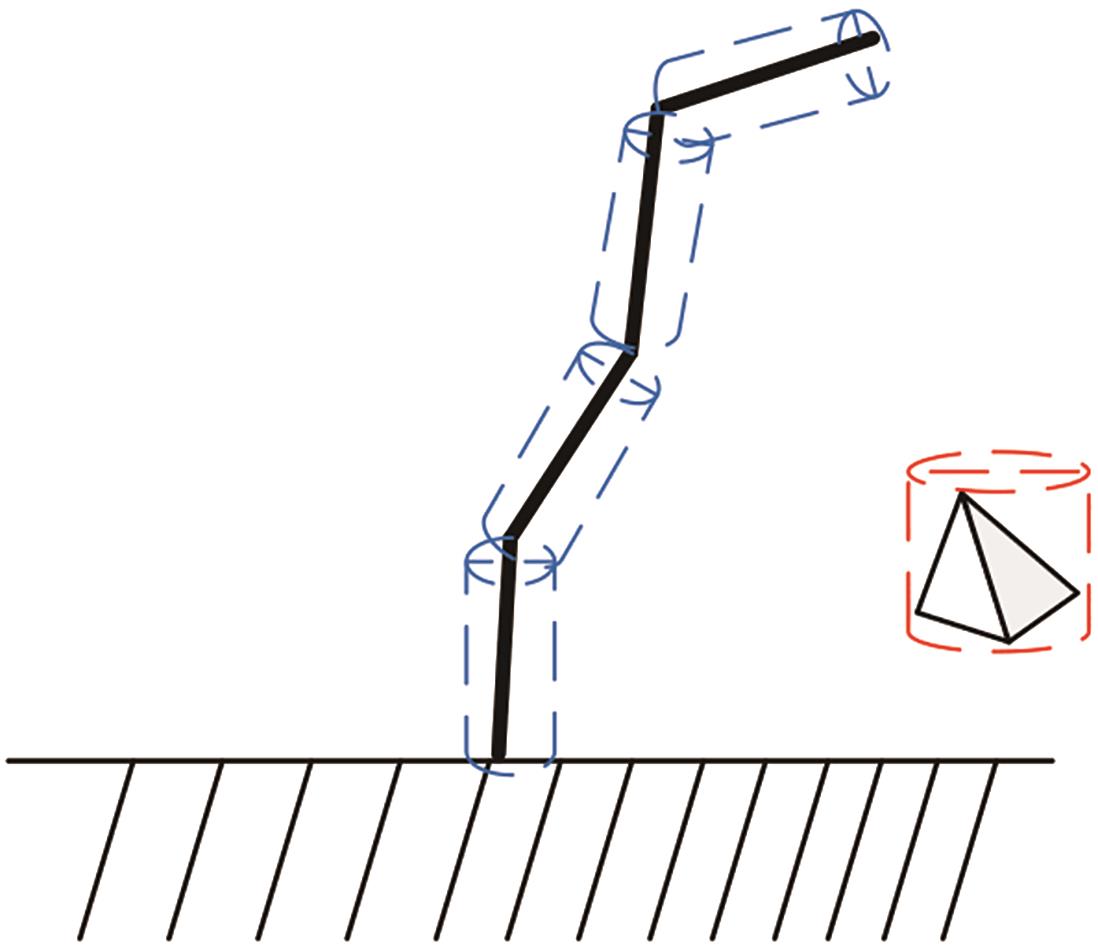
Fig.2 Schematic diagram of a cylindrical bounding box
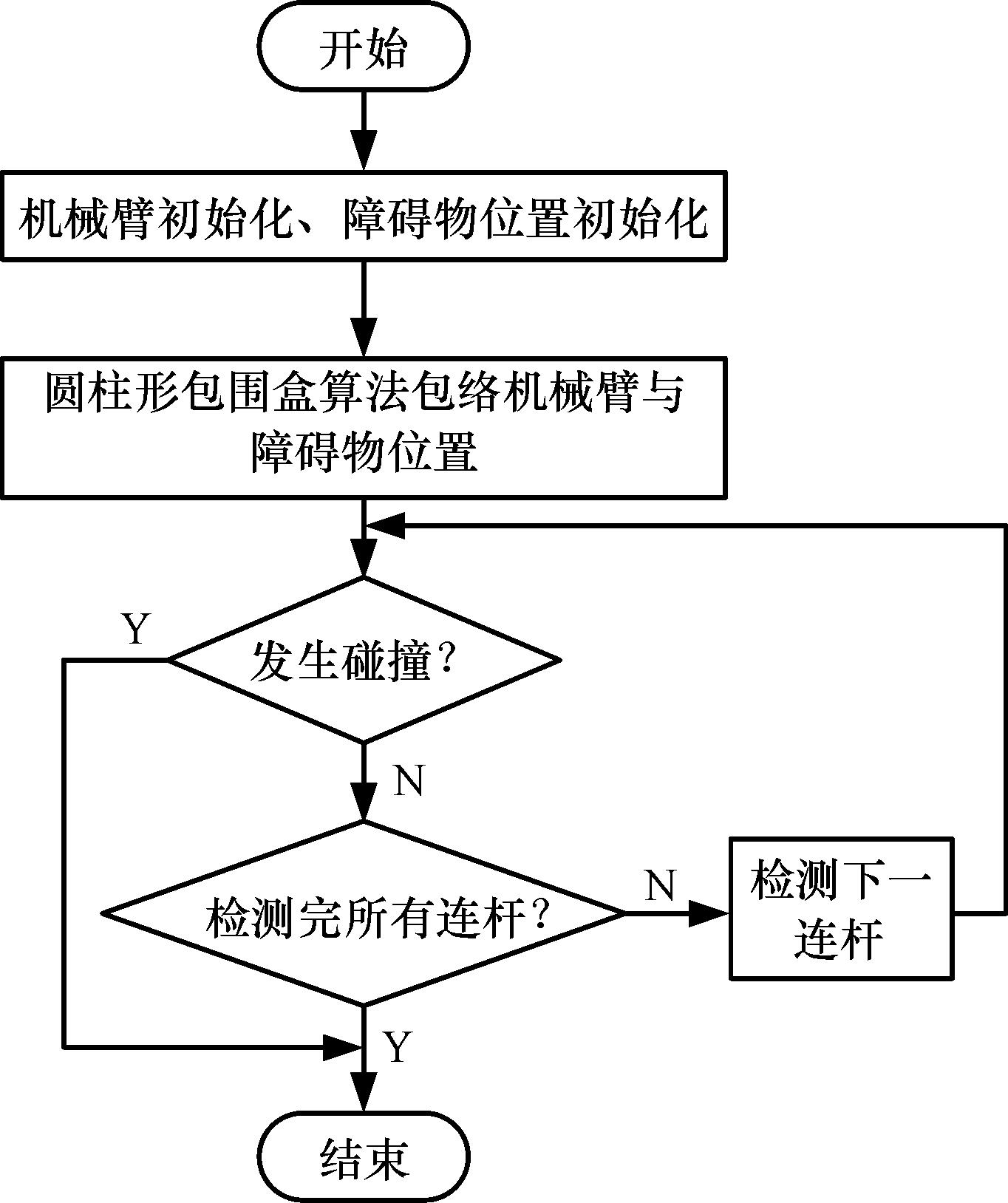
Fig.3 Collision detection flowchart
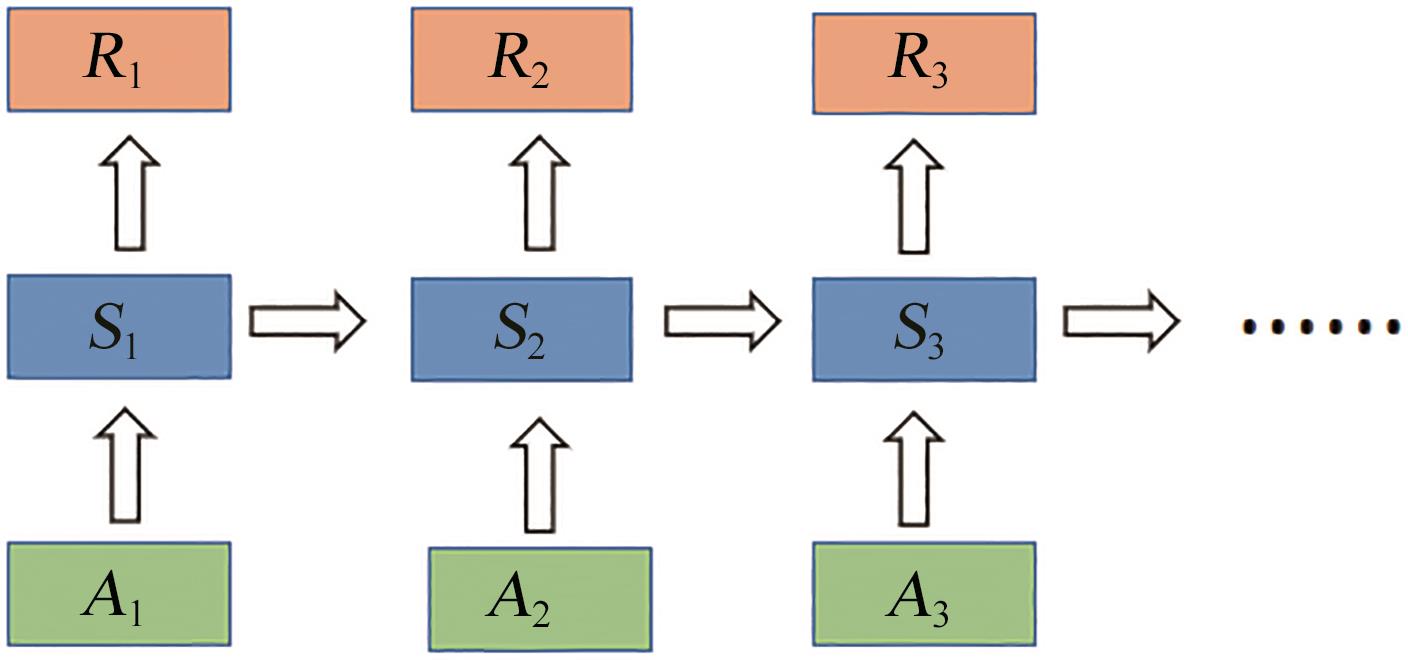
Fig.4 Markov decision process diagram
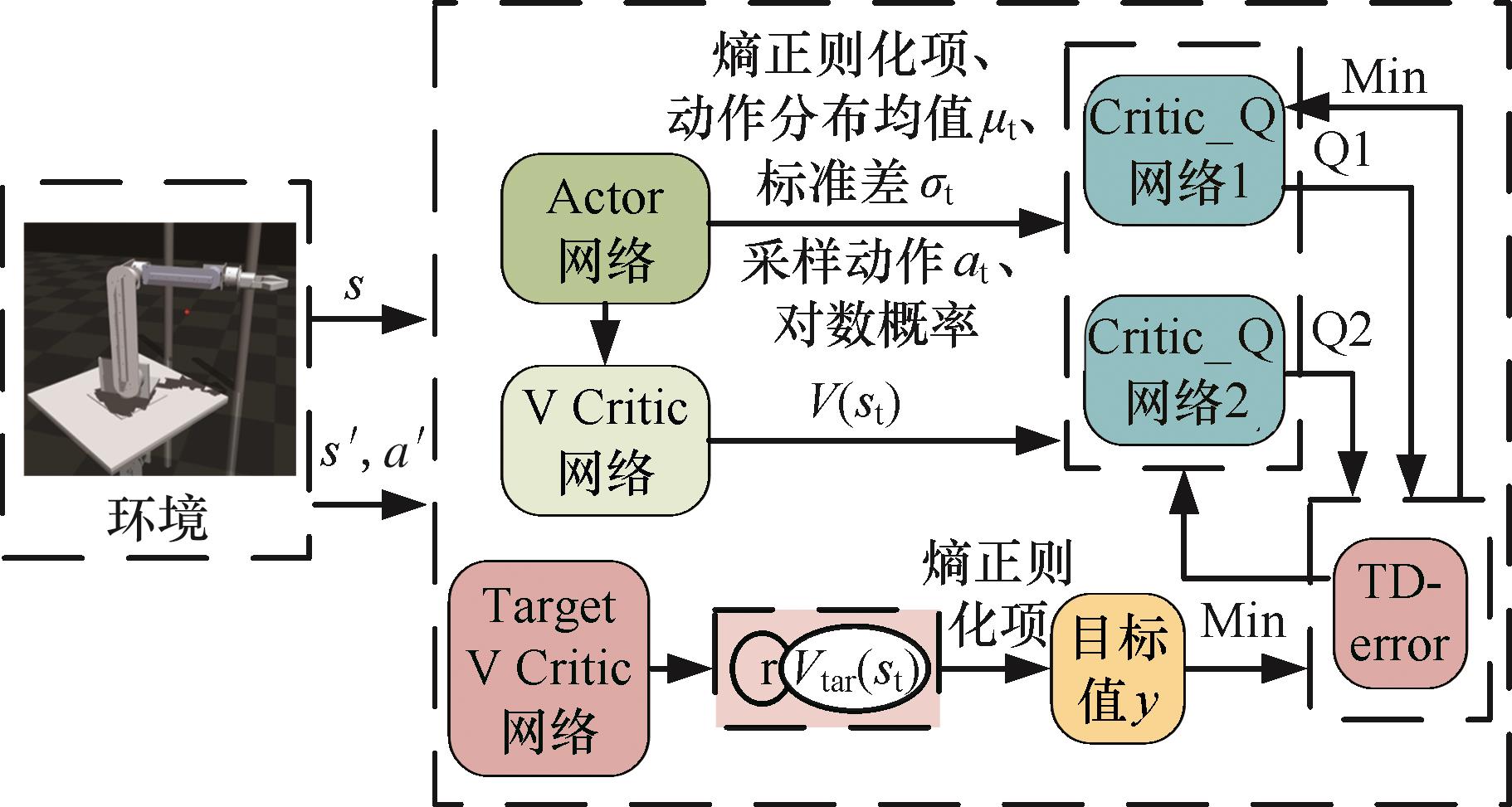
Fig.5 SAC algorithm block diagram
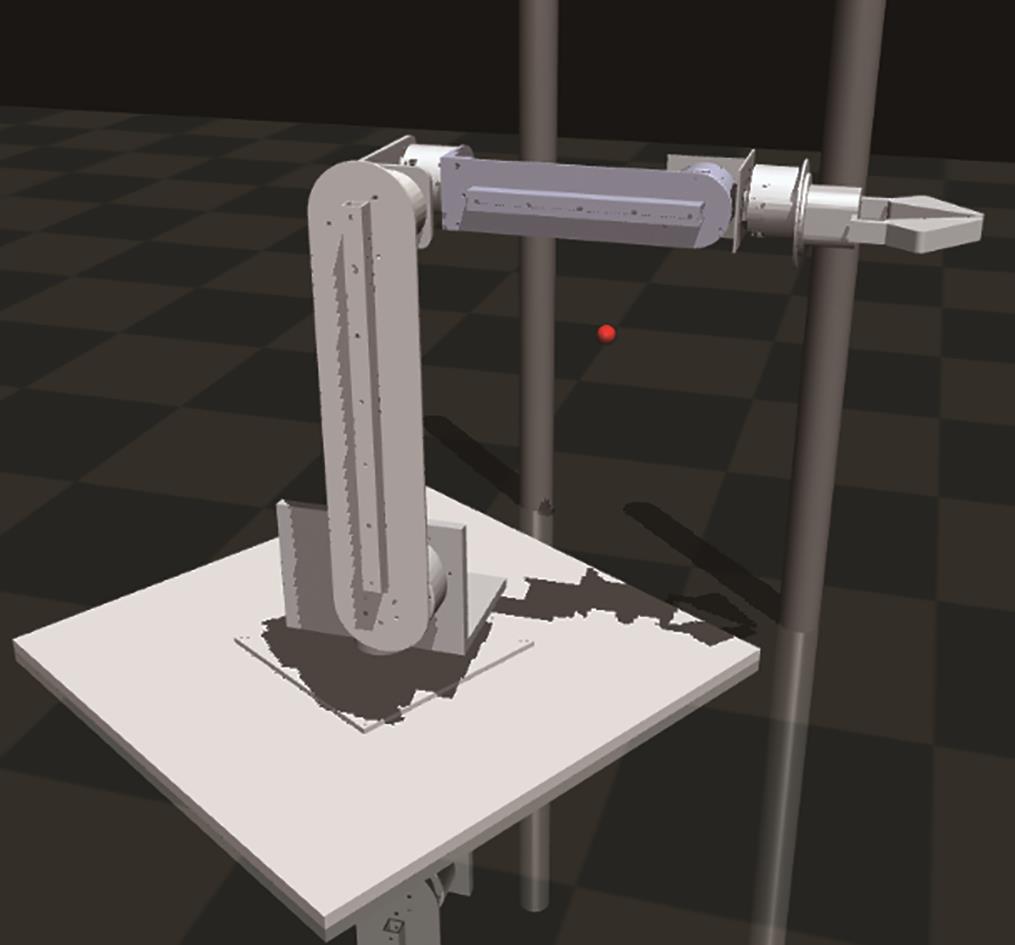
Fig.6 Robotic arm deep reinforcement learning simulation model
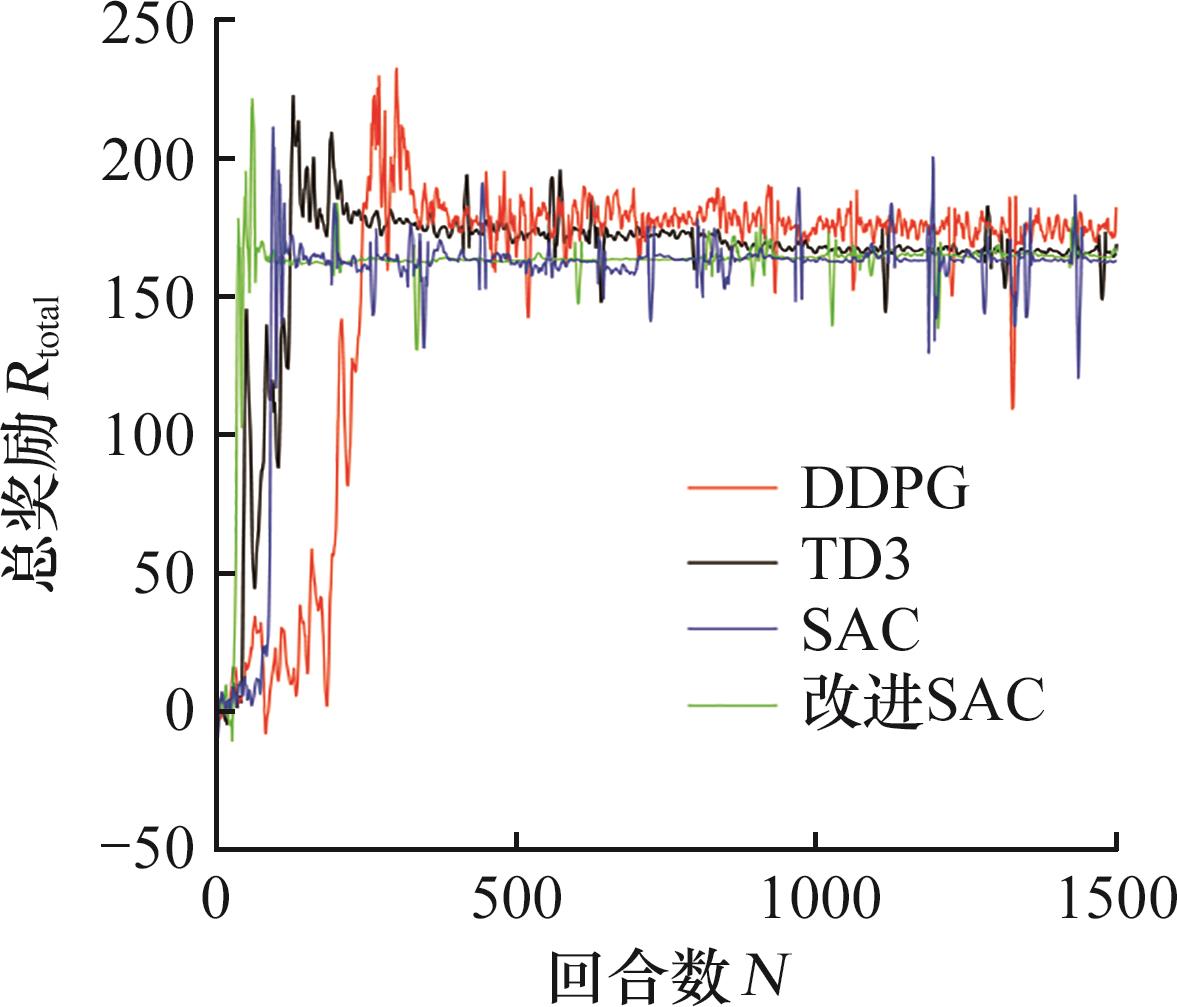
Fig.7 Episode vs Reward Comparison Curve
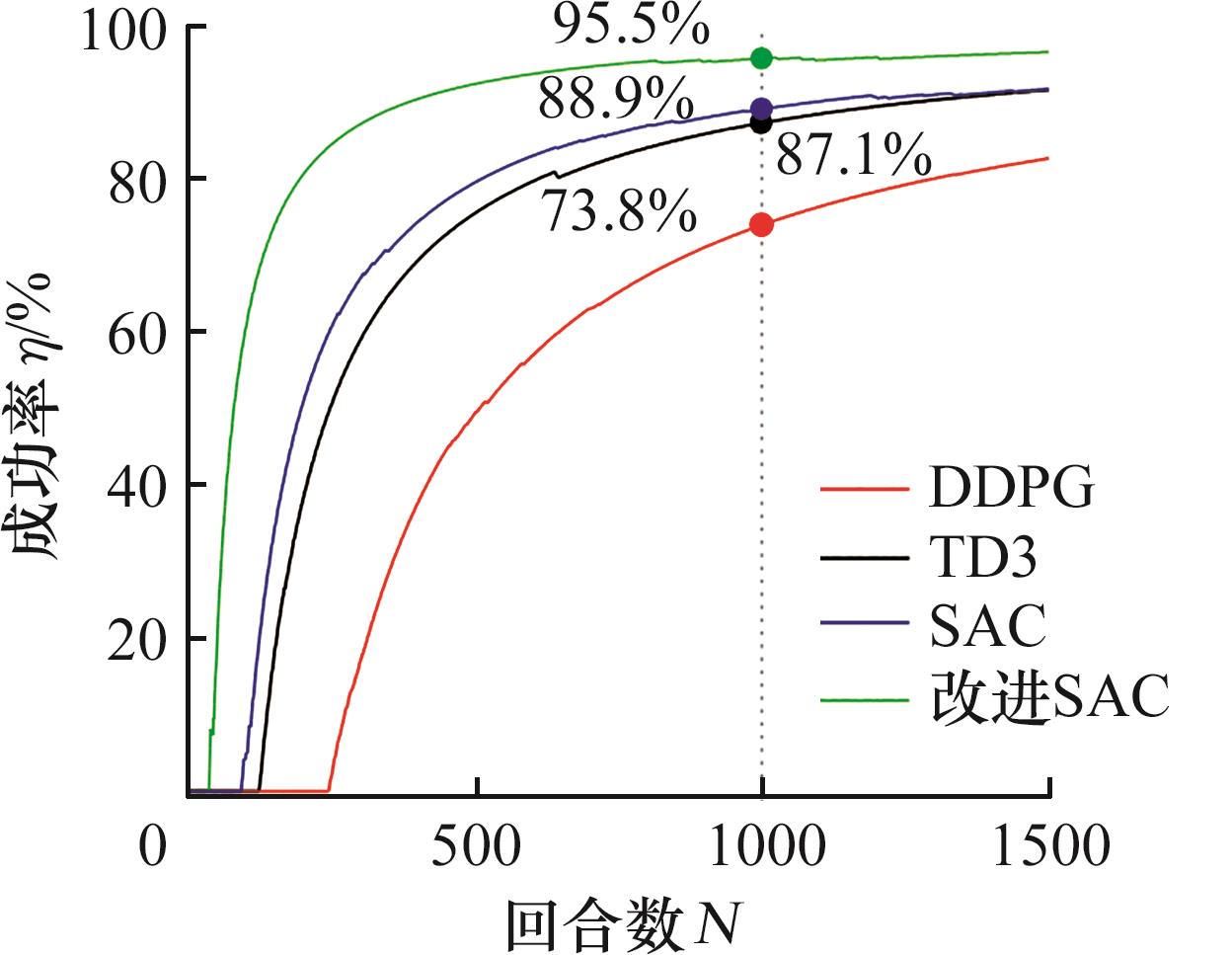
Fig.8 Episode vs success rate comparison curve
| DDPG | TD3 | SAC | 改进SAC | |
|---|---|---|---|---|
| 成功率/% | 82.46 | 91.44 | 91.53 | 96.33 |
Tab.2 Comparison of path planning results of different DRL algorithms
| DDPG | TD3 | SAC | 改进SAC | |
|---|---|---|---|---|
| 成功率/% | 82.46 | 91.44 | 91.53 | 96.33 |
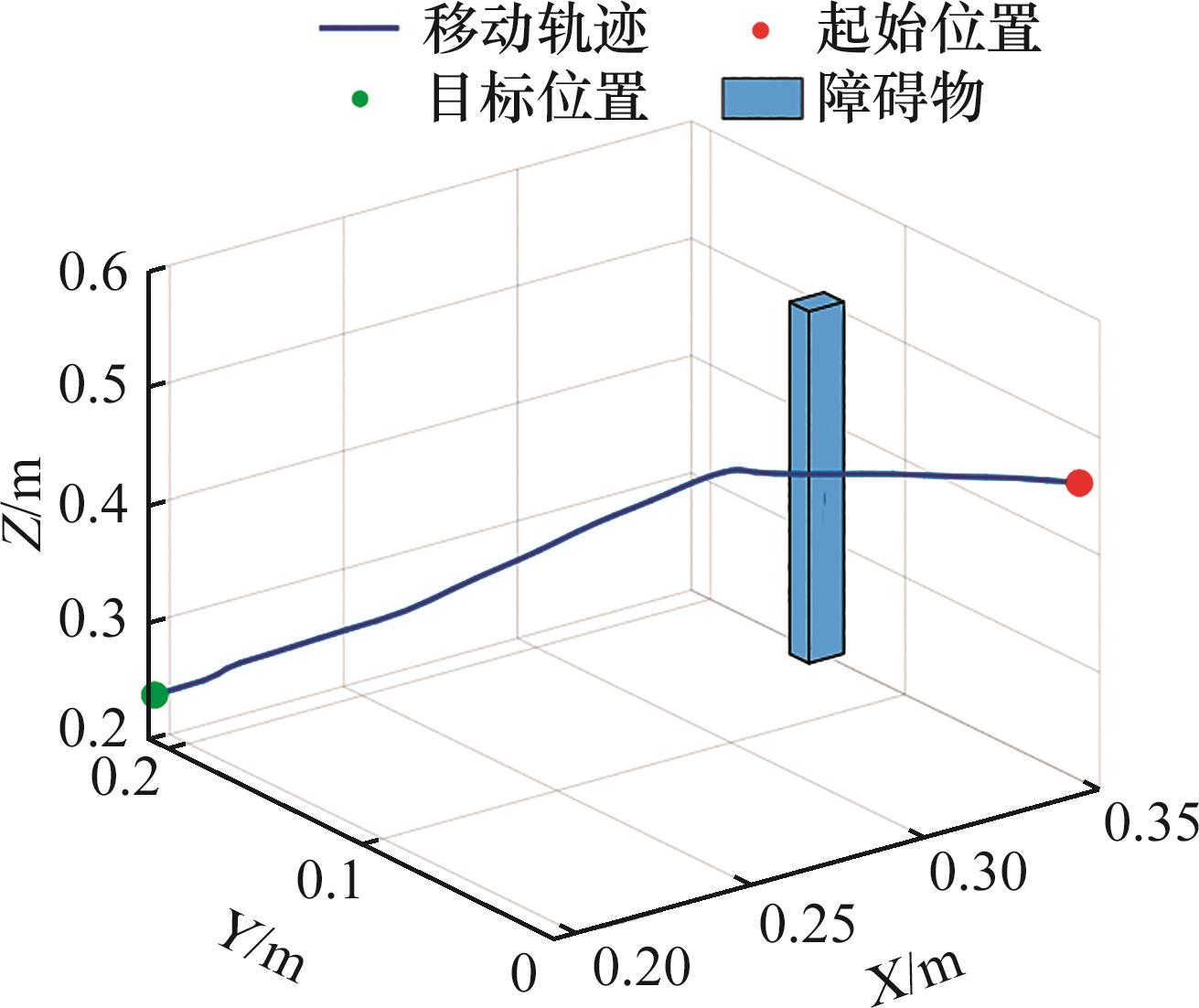
Fig.9 End-effector motion path diagram of a six-axis robotic arm
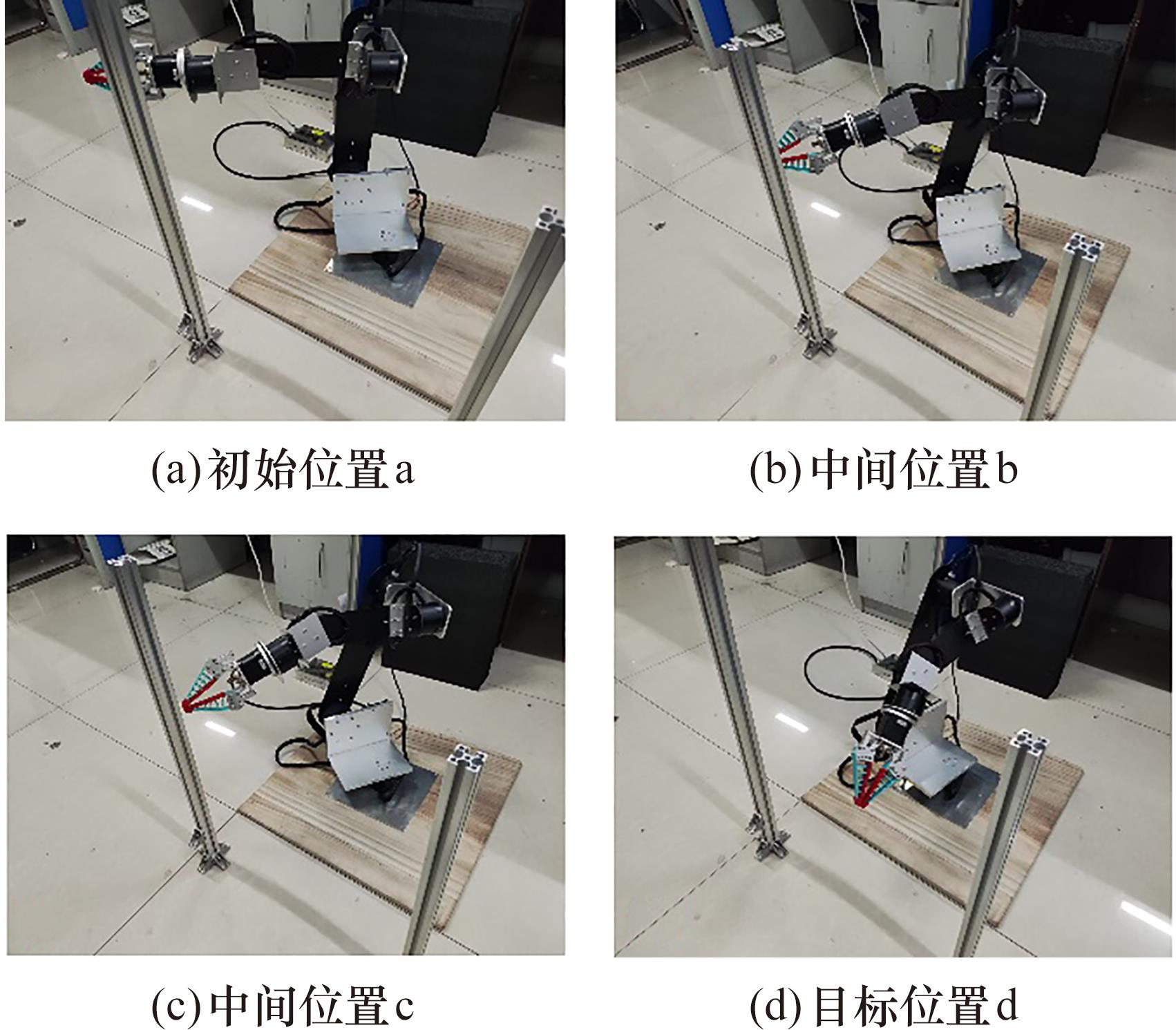
Fig.10 Six-axis robotic arm path planning experiment
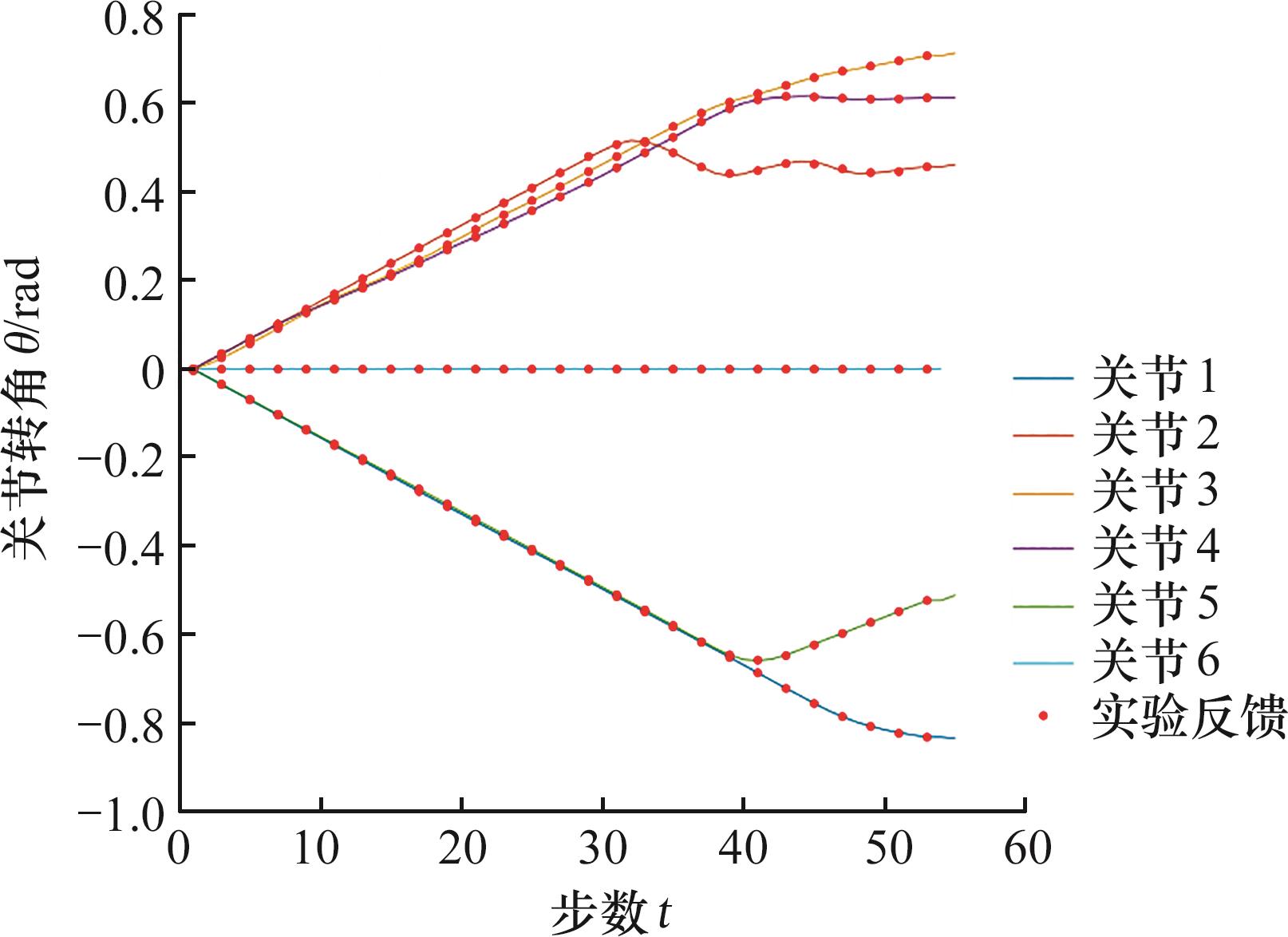
Fig.11 Comparison of joint angle simulation curve (solid line) and joint angle measurement curve (dashed line) for a six-axis robotic arm
| [1] | LIU Y C, HUANG C Y.DDPG-based Adaptive Robust Tracking Control for Aerial Manipulators with Decoupling Approach[J].IEEE Transactions on Cybernetics, 2021(99):1-14. |
| [2] | ALI A A, SHI J F, ZHU Z H.Path Planning of 6-DOF Free-floating Space Robotic Manipulators Using Reinforcement Learning[J].Acta Astronautica, 2024, 224:367-378. |
| [3] | 戴晟潭,王寅,尚晨晨.基于深度强化学习的多无人车协同路径规划方法[J/OL].北京航空航天大学学报, 2024.(2024-09-10)[2025-04-08]. . |
| DAI Shengtan, WANG Yin, SHANG Chenchen.Multi-UAV Collaborative Path Planning Method Based on Deep Reinforcement Learning[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 2024. (2024-09-10)[2025-04-08]. . | |
| [4] | 陈学松,杨宜民.强化学习研究综述[J].计算机应用研究, 2010, 27(8):2834-2838. |
| CHEN Xuesong, YANG Yimin. A Review of Reinforcement Learning Research[J]. Computer Applications and Research, 2010, 27(8):2834-2838. | |
| [5] | 李永迪,李彩虹,张耀玉,等.基于改进SAC算法的移动机器人路径规划[J].计算机应用, 2022, 43(2):654-660. |
| LI Yongdi, LI Caihong, ZHANG Yaoyu, et al. Path Planning of Mobile Robots Based on the Improved SAC algorithm[J]. Computer Applications, 2022, 43(2):654-660. | |
| [6] | 刘正发.面向局部路径规划的深度强化学习移动机器人导航[D].贵阳:贵州大学,2021. |
| LIU Zhengfa. Deep Reinforcement Learning-based Mobile Robot Navigation for Local Path Planning[D]. Guiyang: Guizhou University, 2021. | |
| [7] | 裴结安.基于深度强化学习的机械臂动态避障规划策略研究[D].南昌:华东交通大学,2022. |
| PEI Jiean. Research on Dynamic Obstacle Avoidance Planning Strategy of Robotic Arm Based on Deep Reinforcement Learning[D]. Nanchang:East China Jiaotong University, 2022. | |
| [8] | ZHANG Y, CHEN P.Path Planning of a Mobile Robot for a Dynamic Indoor Environment Based on an SAC-LSTM Algorithm[J].Sensors, 2023, 23(24): 9802. |
| [9] | KHALIL W, KLEINFINGER J.A New Geometric Notation for Open and Closed-loop Robots[C]∥IEEE International Conference on Robotics & Automation.San Francisco, 1986:1174-1179. |
| [10] | 靳雁霞,乔星宇,张翎,等.布料与刚体模型间的空间网格碰撞检测方法[J].中国图象图形学报, 2024, 29(10):3144-3156. |
| JIN Yanxia, QIAO Xingyu, ZHANG Ling, et al. A Spatial Mesh Collision Detection Method Between Cloth and Rigid Body Models[J]. Journal of Image and Graphics, 29(10), 3144-3156.. | |
| [11] | CAO X, ZOU X, JIA C,et al.RRT-based Path Planning for an Intelligent Litchi-picking Manipulator[J].Computers and Electronics in Agriculture, 2019, 156:105-118. |
| [12] | SUTTON R S, BARTO A G.Reinforcement Learning: an Introduction[J].IEEE Transactions on Neural Networks, 1998, 9(5):1054. |
| [13] | BELLMAN R. A Markovian Decision Process[J]. Journal of Mathematics and Mechanics, 1957(6): 679-684. |
| [14] | 张宇航, 陈雯柏, 张佳琪, 等. 一种面向六自由度机械臂柔顺装配的深度强化学习策略[J]. 重庆理工大学学报 (自然科学), 2025, 38(12): 148-154. |
| ZHANG Yuhang, CHEN Wenbai, ZHANG Jiaqi, et al.A Deep Reinforcement Learning Strategy for Compliant Assembly of Six-degree-of-freedom Robotic Arms[J]. Journal of Chongqing University of Technology (Natural Science), 2025, 38(12): 148-154. | |
| [15] | HAARNOJA T, ZHOU A, HARTIKAINEN K,et al.Soft Actor-Critic Algorithms and Applications[EB/OL].[2025-04-08].. |
| [16] | 何联格,李天华,聂远航,等.一种基于DDPG算法的6轴机械臂控制研究[J].重庆理工大学学报(自然科学), 2023, 37(9):134-140. |
| HE Lianluo, LI Tianhua, NIE Yuanhuang, et al. A Study on the Control of a 6-axis Robotic Arm Based on the DDPG Algorithm[J]. Journal of Chongqing University of Technology(Natural Science), 2023, 37(9), 134-140. | |
| [17] | 时高松, 赵清海, 董鑫, 等. 基于 PPO 算法的自动驾驶人机交互式强化学习方法[J]. 计算机应用研究, 2024, 41(9):2732-2736. |
| SHI Gaosong, ZHAO Qinghai, DONG Xin, et al. A Human-machine Interactive Reinforcement Learning Method for Autonomous Driving Based on the PPO Algorithm[J]. Application Research of Computers, 2024, 41(9):2732-2736. | |
| [18] | 方宝富, 余婷婷, 王浩, 等. 稀疏奖励场景下基于状态空间探索的多智能体强化学习算法[J]. 模式识别与人工智能, 2024, 37(5): 435-446. |
| FANG Baofu, YU Tingting, WANG Hao, et al.Multi-agent Reinforcement Learning Algorithm Based on State Space Exploration in Sparse Reward Scenarios[J]. Pattern Recognition and Artificial Intelligence, 2024, 37(5): 435-446. | |
| [19] | NAIK A, WAN Y, TOMAR M, et al. Reward Centering[EB/OL]. [2025-04-08].. |
| [1] | GUO Wanjin1, 2, 3, 4, SUN Hao1, LI Qianhui1, TIAN Yuxiang1, CAO Chuqing2, ZHAO Lijun2, 4. Tool Path Planning and Tool Orientation Optimization for Robotic Grinding of Wheel Hub Burrs [J]. China Mechanical Engineering, 2025, 36(06): 1222-1237. |
| [2] | HAN Jiang1, 2, ZHANG Wenqiang1, 2, TIAN Xiaoqing1, 2, XIA Lian1, 2. Generation Method of Milling Paths of Open Blisk Channels Based on Parameter Mapping [J]. China Mechanical Engineering, 2025, 36(04): 688-696. |
| [3] | ZHANG Daode, LU Zijian, ZHAO Kun, YANG Zhiyong. Research on Multi-objective Path Planning Method for Tracked Robots under Non-flat Environments [J]. China Mechanical Engineering, 2025, 36(02): 305-314. |
| [4] | ZHANG Zhiwen1, 2, LIU Bowei3, ZHANG Jiyuan1, TANG Jie1, ZHANG Tianci1, 2. Cooperative Optimization of Intelligent Vehicle Path Planning Based on PSO-SSA and RRT [J]. China Mechanical Engineering, 2024, 35(06): 993-999,1009. |
| [5] | LI Jiaxuan, LI Lun, ZHOU Bo, ZHAO Jibin, ZHU Guang, WANG Zhengjia, . A Robotic Multi-directional Polishing Trajectory Generation Method Based on Preston-PSO Algorithm [J]. China Mechanical Engineering, 2023, 34(14): 1729-1740. |
| [6] | TANG Wei, SUN Yu, GU Jinfeng, CHEN Yuan. Transmission Model and Path Planning of Variable-size Materials in Continuous Alternate Wheel Systems [J]. China Mechanical Engineering, 2023, 34(11): 1372-1385. |
| [7] | WU Xing, YANG Junjie, TANG Kai, ZHAI Jingjing, LOU Peihuang. Hierarchical Path Planning for Mobile Robots Based on Hybrid Map [J]. China Mechanical Engineering, 2023, 34(05): 563-575. |
| [8] | ZHANG Jiaxu, ZHOU Shiying, LI Changlong, GUO Chong, ZHAO Jian. Autonomous Valet Parking Path Planning for Wire-four-wheel Steering Vehicles [J]. China Mechanical Engineering, 2022, 33(08): 993-1000. |
| [9] | ZOU Yuji, SONG Yuchuan, WANG Xinkun, WANG Yi. Clustering Genetic Algorithm for Multi-objective Integrated Scheduling of AGVs and Machine [J]. China Mechanical Engineering, 2022, 33(01): 97-108. |
| [10] | LU Hao, CHEN Yang, WU Huaiyu, CHENG Lei, . Path Planning of Substation Inspection Robot under Road Network and Measurement Constraints [J]. China Mechanical Engineering, 2021, 32(16): 1972-1982. |
| [11] | CHEN Zhe, LIU Feng, WU Xiaochuan, DU Wudi. Research on Multi-needles-multi-directions Cooperative Weaving Path Generation Method of Composite Preform#br# [J]. China Mechanical Engineering, 2021, 32(10): 1151-1156. |
| [12] | LIN Xinyou, ZHOU Binhao, XIA Yutian. Charging Path Planning Strategy of Electric Vehicles with Integrating Dynamic Energy Consumption and Network Information [J]. China Mechanical Engineering, 2021, 32(06): 705-713. |
| [13] | LI Guomin;GAO Liang;LI Xinyu. Dynamic Scheduling of RGV under Uncertain Environments [J]. China Mechanical Engineering, 2019, 30(08): 926-931. |
| [14] | JIANG Kang;MA Shiji. A Cable Path Planning Method Based on Improved A* Algorithm [J]. China Mechanical Engineering, 2019, 30(06): 699-708. |
| [15] | LI Maoyue;CHEN Yue;XU Guangqi. Automatic Parking Path Planning for Dead Zone Avoidance Based on Entry Baselines [J]. China Mechanical Engineering, 2019, 30(01): 53-63. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||