ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (5): 1193-1198.DOI: 10.3969/j.issn.1004-132X.2026.05.019
• 智能制造 • 上一篇
董佳祥1( ), 赵学智1, 胡希平2, 刘铨权2,3()
), 赵学智1, 胡希平2, 刘铨权2,3()
DONG Jiaxiang1(), ZHAO Xuezhi1, HU Xiping2, LIU Quanquan2,3()
摘要:
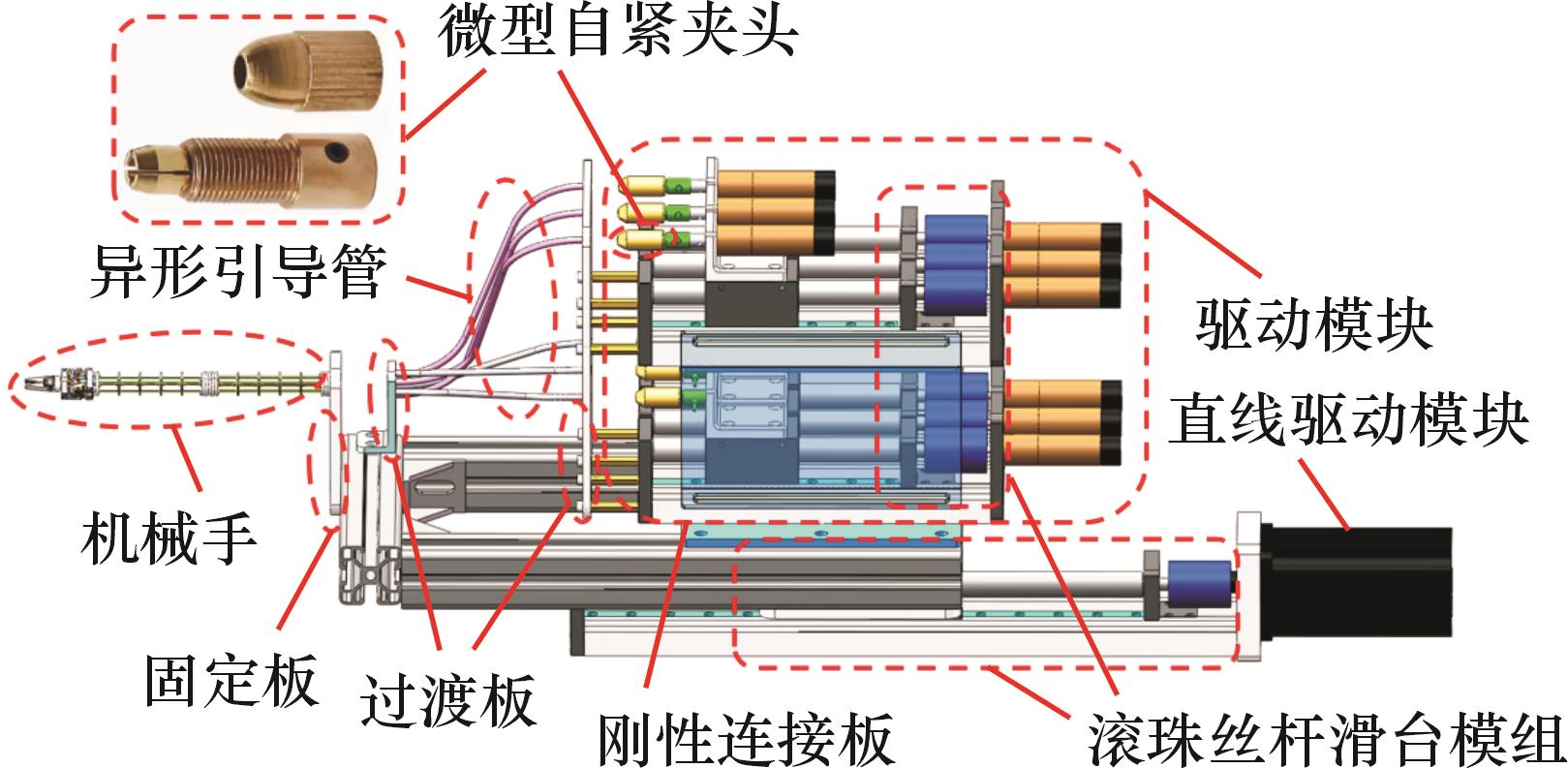
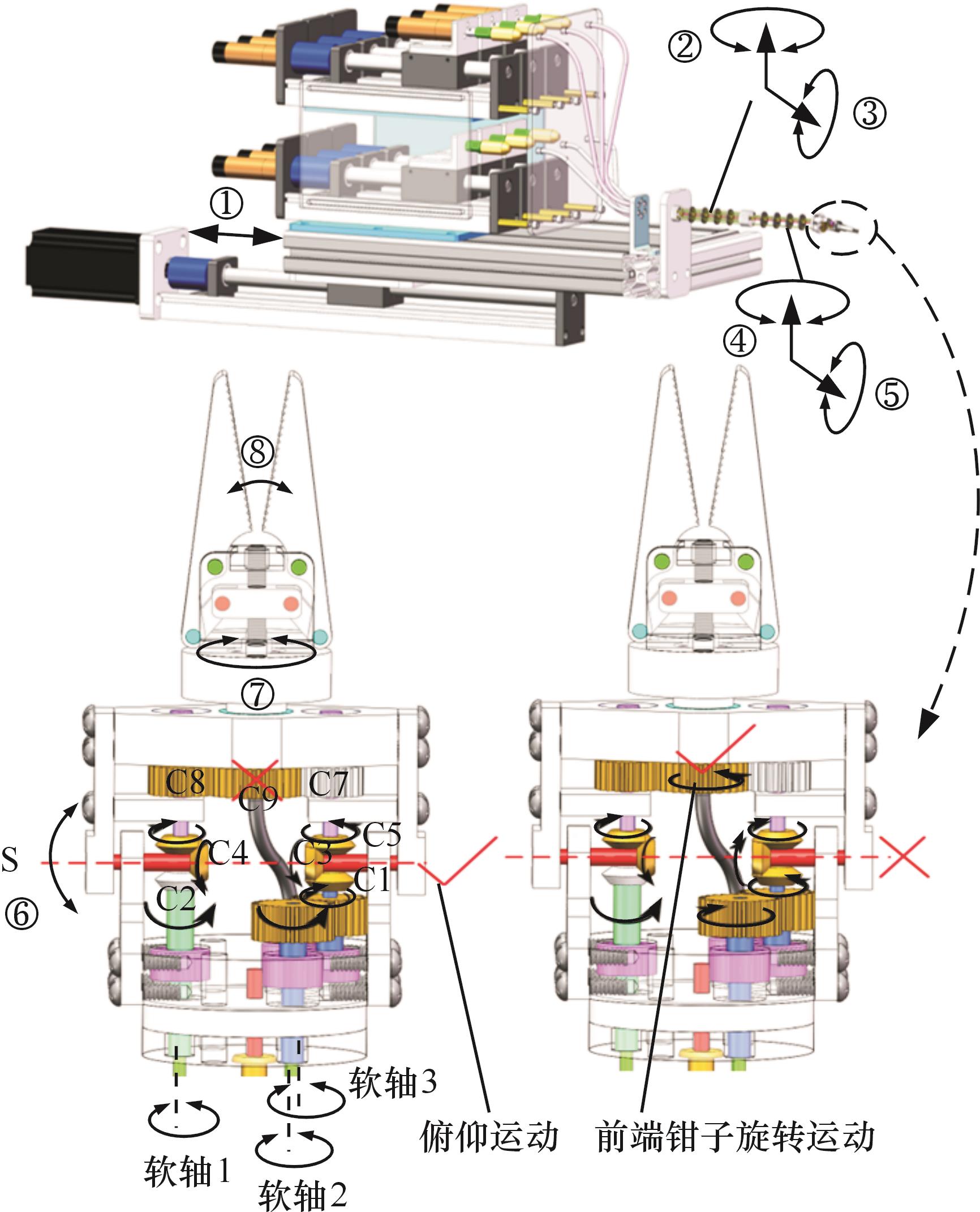
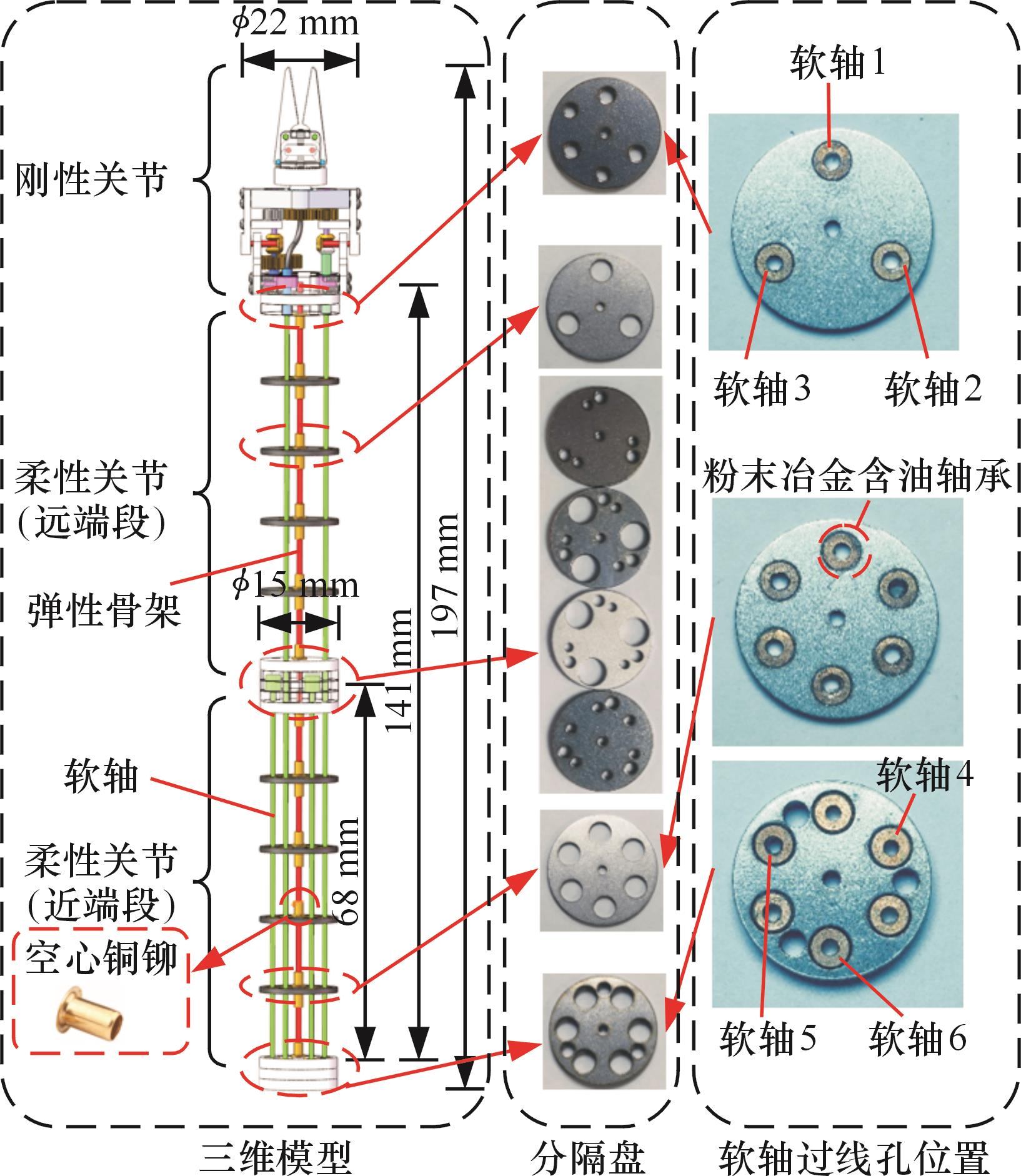
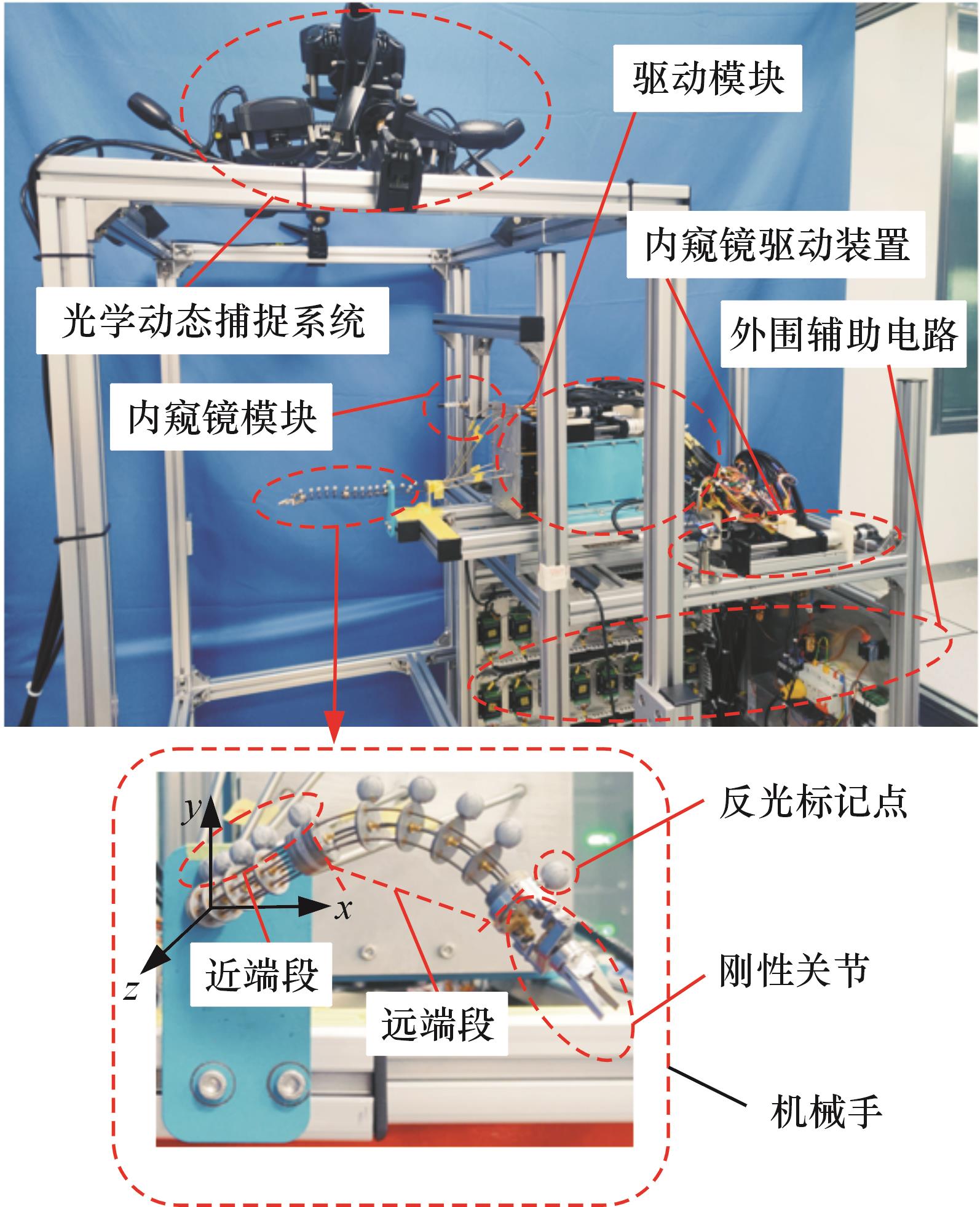
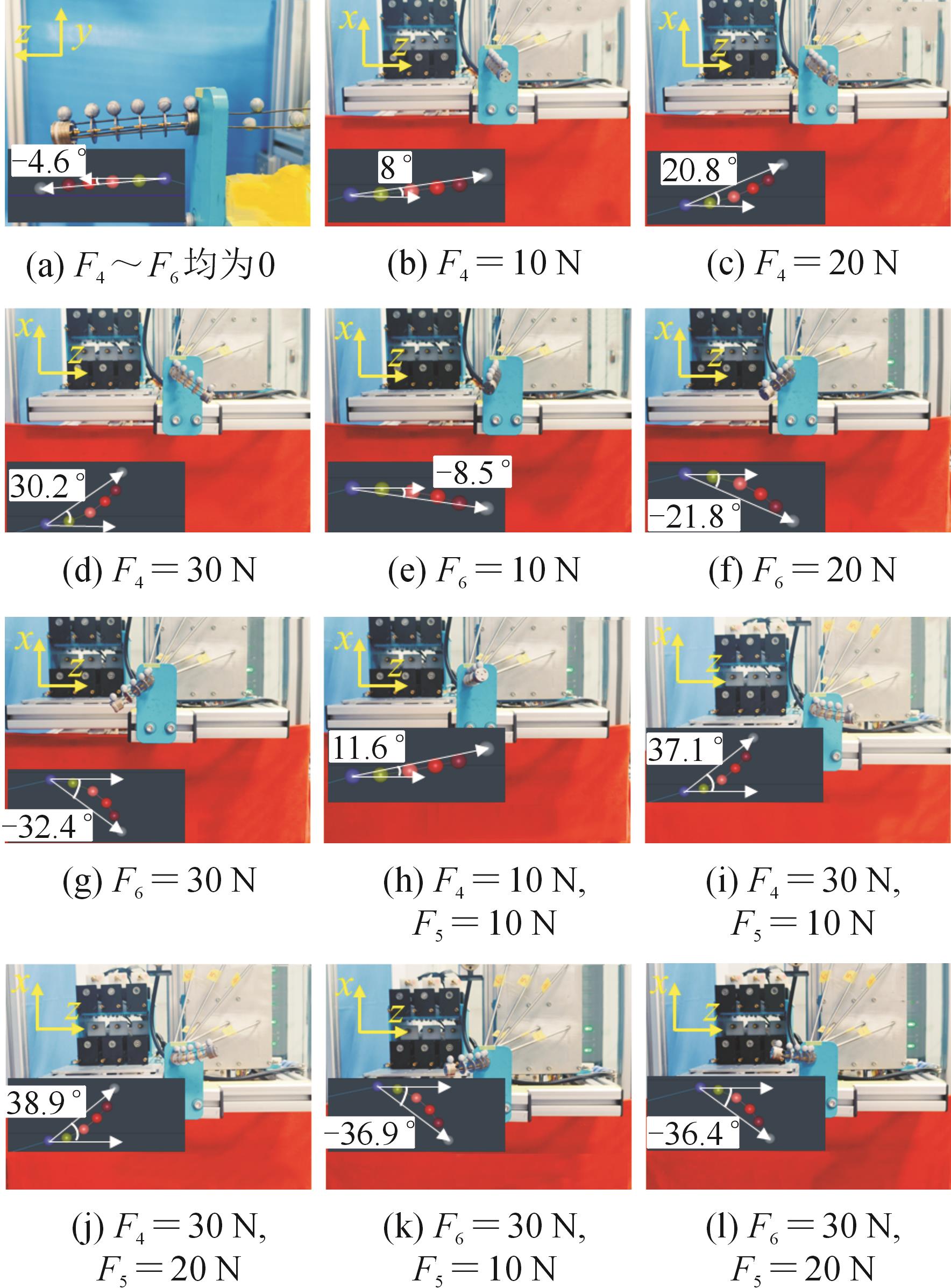
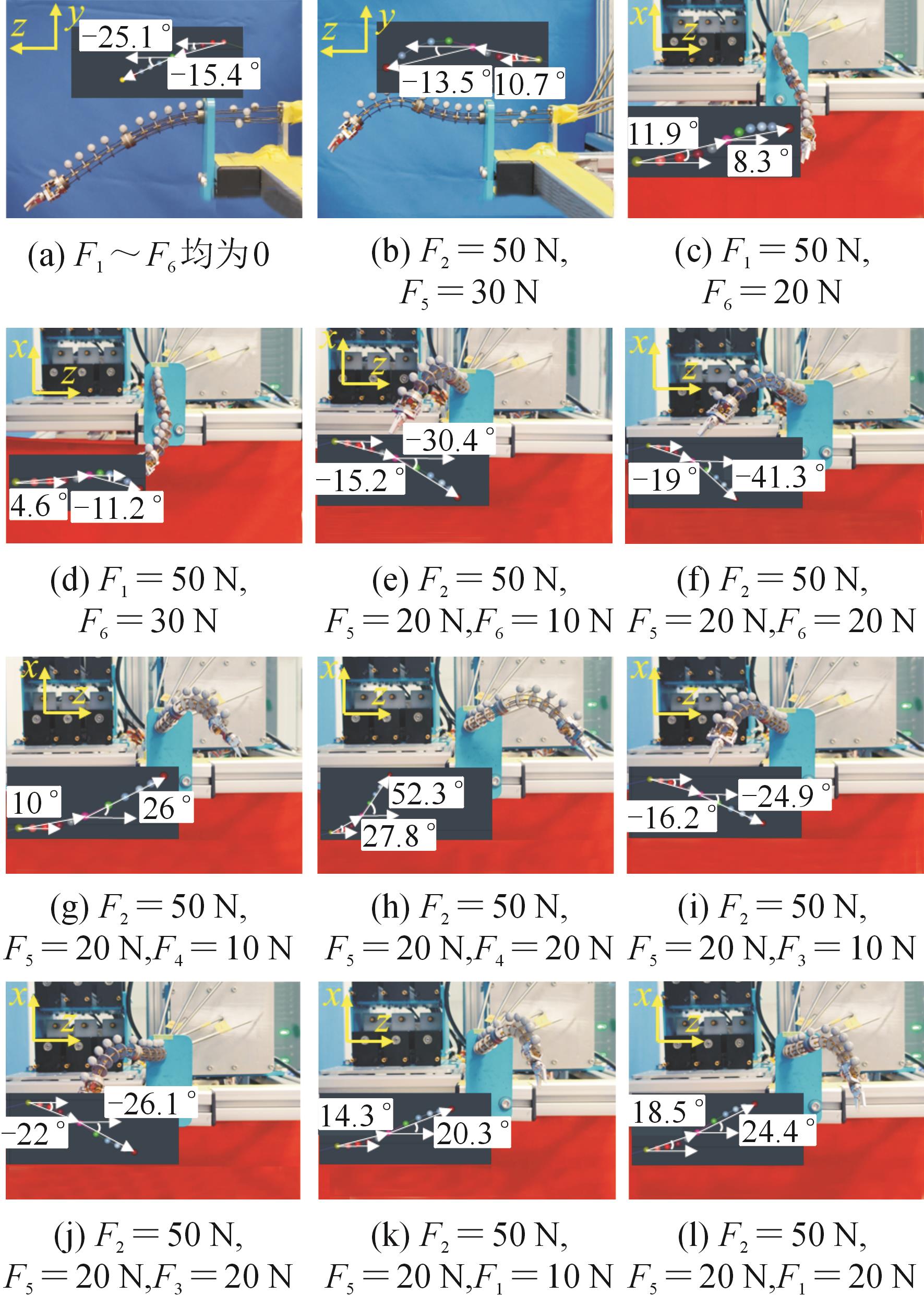
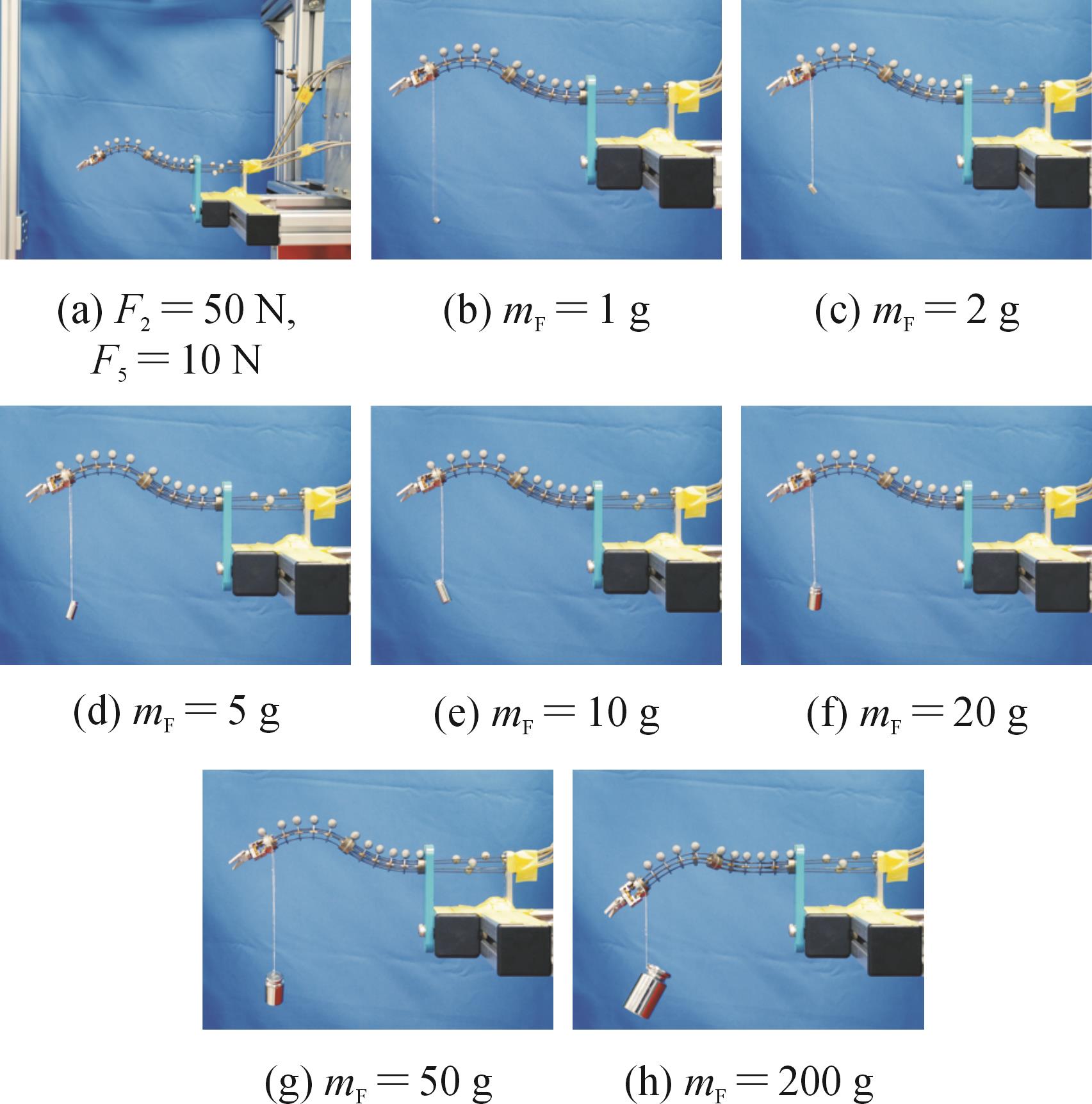
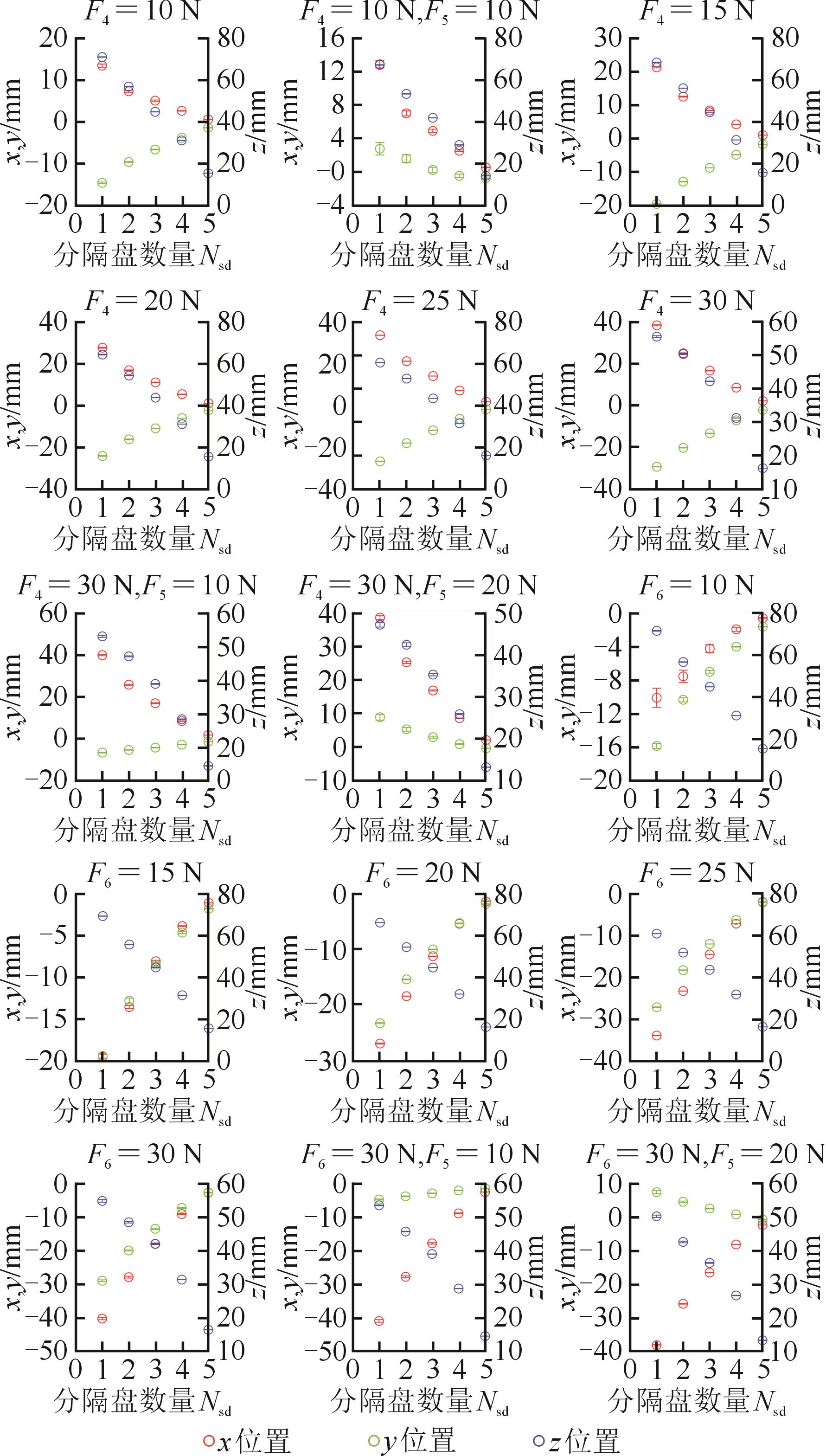
利用软轴良好的拉扭协同驱动特点设计了一种结合“双段柔性体+单段刚性体”的新型刚柔混联连续体机器人机构,实现了6根软轴拉扭动力输入与7自由度运动输出。该机构通过软轴的牵拉运动来控制柔性段的弯曲形态,利用扭转运动来控制末端刚性关节运动。搭建了实验平台并对该机构的物理性能进行了实验验证。实验结果表明,该机构具有灵活的多自由度弯曲能力和良好的负载能力;重复性实验中,单/双段连续体机器人最大标准差分别仅占机械手长度的1.62%和7.66%,验证了该机器人机构设计具有良好的定位稳定性和可靠性。
中图分类号: