


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (12): 2885-2893.DOI: 10.3969/j.issn.1004-132X.2025.12.010
• 机械基础工程 • 上一篇
王旭浩1( ), 盛卧龙1, 吴孟丽1(), 许贻龙1, 赵晓巍2,3, 曹轶然1
), 盛卧龙1, 吴孟丽1(), 许贻龙1, 赵晓巍2,3, 曹轶然1
收稿日期:2024-11-13
出版日期:2025-12-25
发布日期:2025-12-31
通讯作者:
吴孟丽
作者简介:王旭浩,男,1989年生,博士,讲师。研究方向为机器人机构学和民航特种智能装备。E-mail:xh_wang@cauc.edu.cn。
基金资助:
Xuhao WANG1(), Wolong SHENG1, Mengli WU1(), Yilong XU1, Xiaowei ZHAO2,3, Yiran CAO1
Received:2024-11-13
Online:2025-12-25
Published:2025-12-31
Contact:
Mengli WU
摘要:
提出一种新型蛇形臂机器人,该机器人模块化关节具有主动的可伸缩自由度,增加了整机运动的灵活性和复杂空间适应能力。建立了蛇形臂机器人的运动学模型,分析了驱动空间、关节空间与末端操作空间的映射关系。针对关节具有伸缩自由度的构型特点,提出了两种关节-末端逆运动学算法,即结合传统FABRIK算法与基于雅可比矩阵迭代法的组合算法、杆长迭代更新的改进FABRIK算法。为了验证两种算法的计算精度和效率,进行了数值仿真对比,结果表明两种算法均具有良好的运算精度,改进的FABRIK算法具有更高的运算效率。最后搭建了物理样机并开展了实验验证,证明了所提出蛇形臂机器人具有良好的弯曲性能和伸缩运动性能。
中图分类号:
王旭浩, 盛卧龙, 吴孟丽, 许贻龙, 赵晓巍, 曹轶然. 可伸缩蛇形臂机器人的设计及运动学建模[J]. 中国机械工程, 2025, 36(12): 2885-2893.
Xuhao WANG, Wolong SHENG, Mengli WU, Yilong XU, Xiaowei ZHAO, Yiran CAO. Design and Kinematics Modeling of Extensible Snake-like Manipulators[J]. China Mechanical Engineering, 2025, 36(12): 2885-2893.
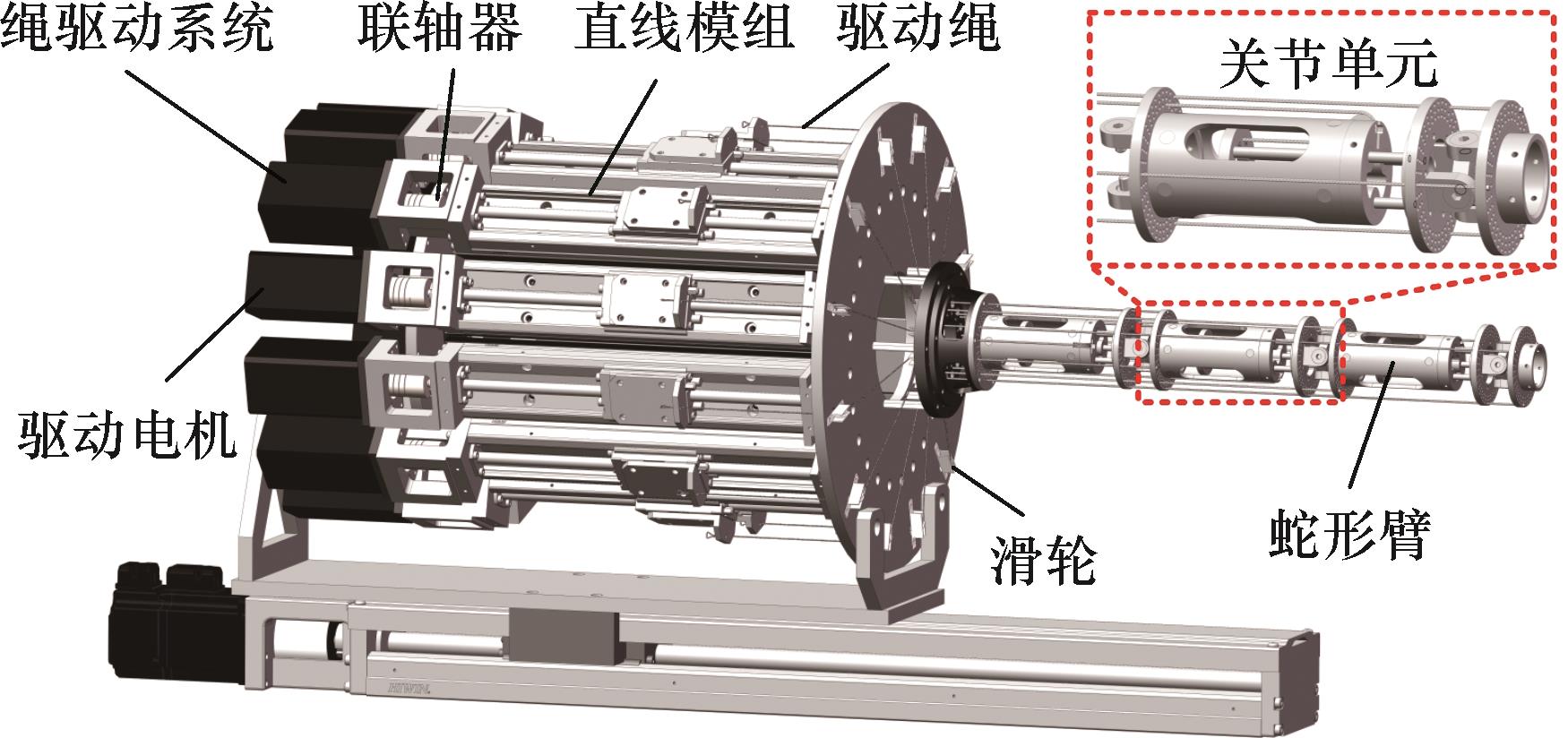
图1 可伸缩蛇形臂机器人模型
Fig.1 Model of the extensible snake-like manipulator
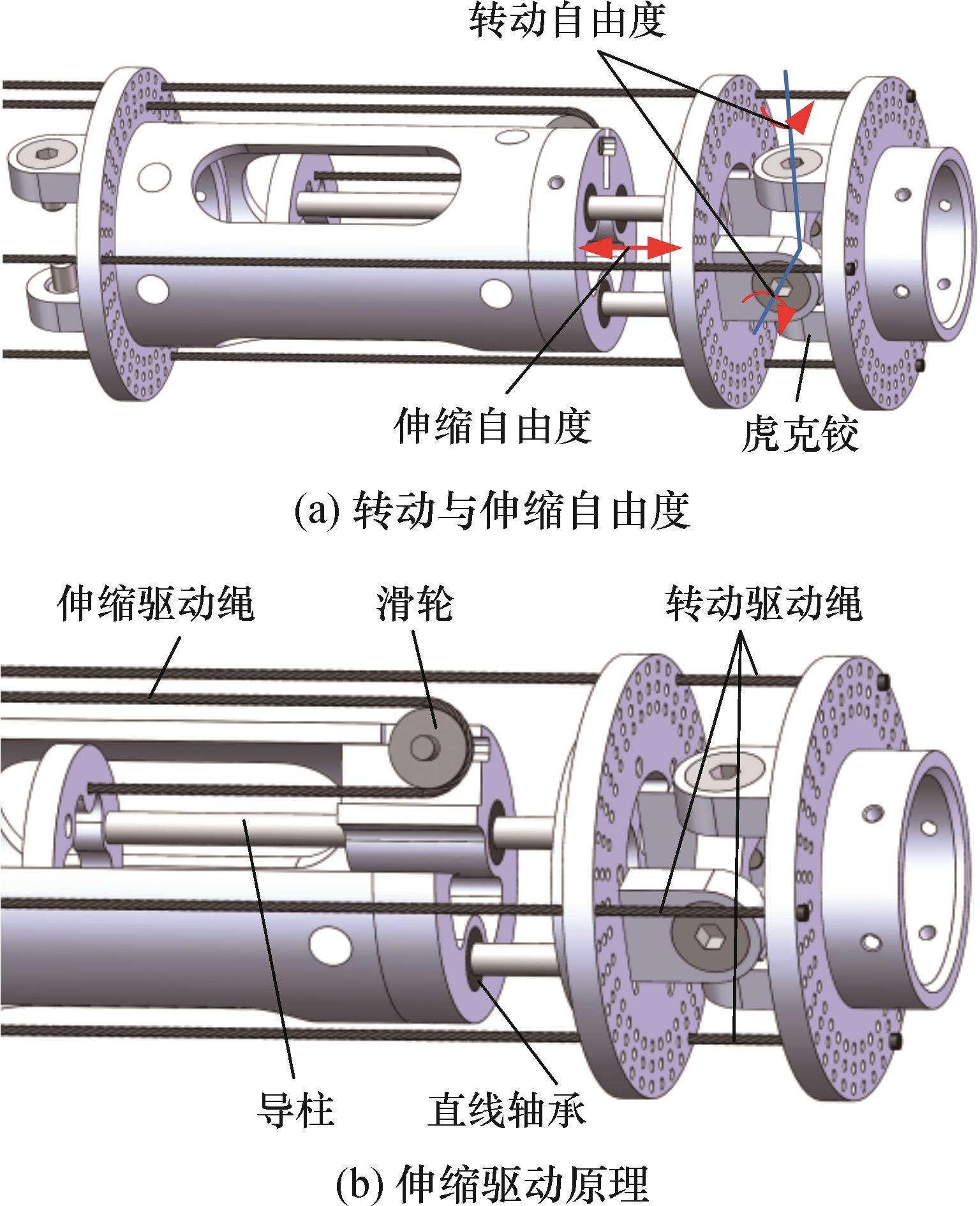
图2 可伸缩关节单元模型
Fig.2 Model of the extensible joint unit
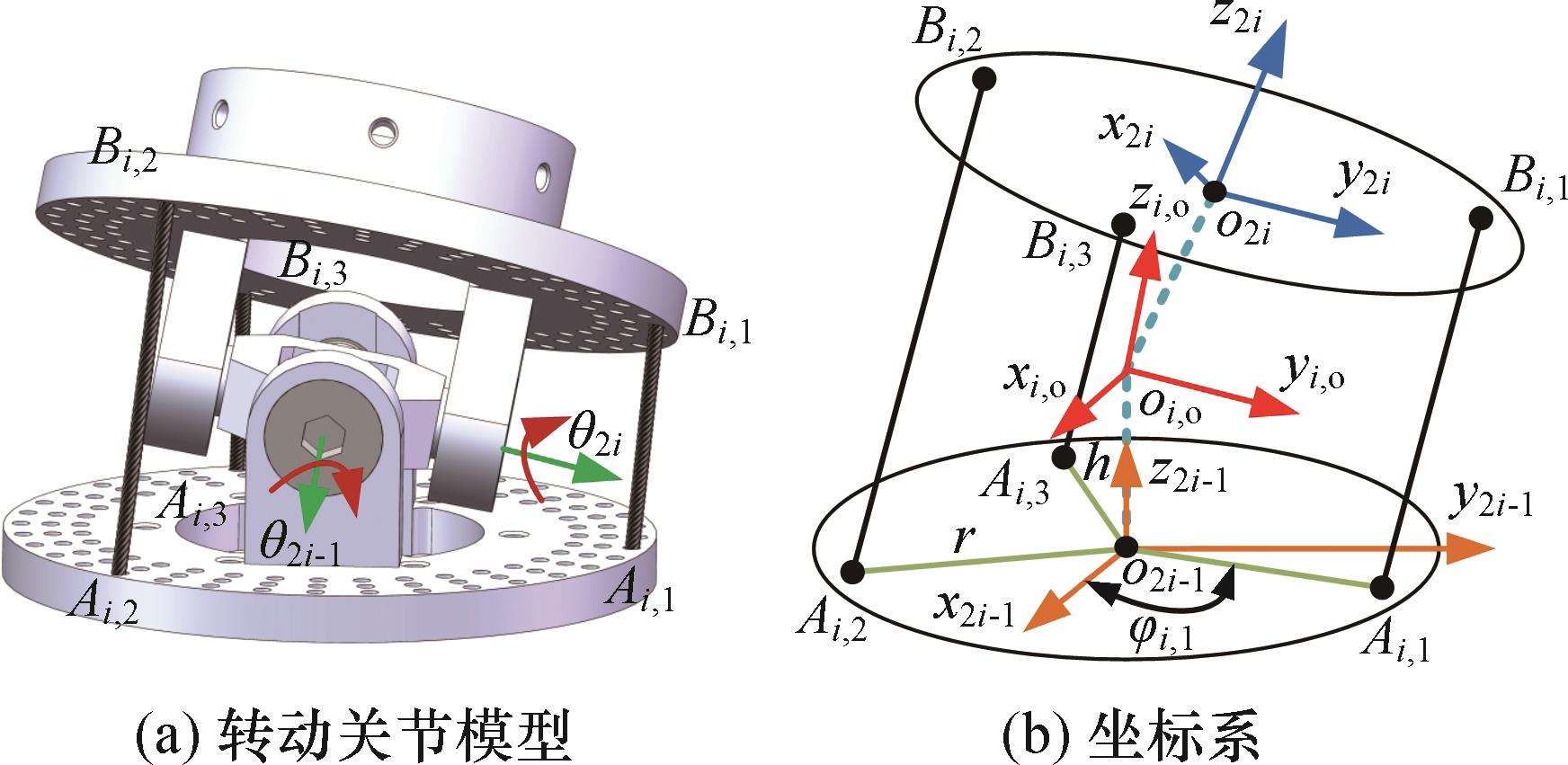
图3 关节单元转动自由度模型
Fig.3 Model of revolute DOFs in the joint unit
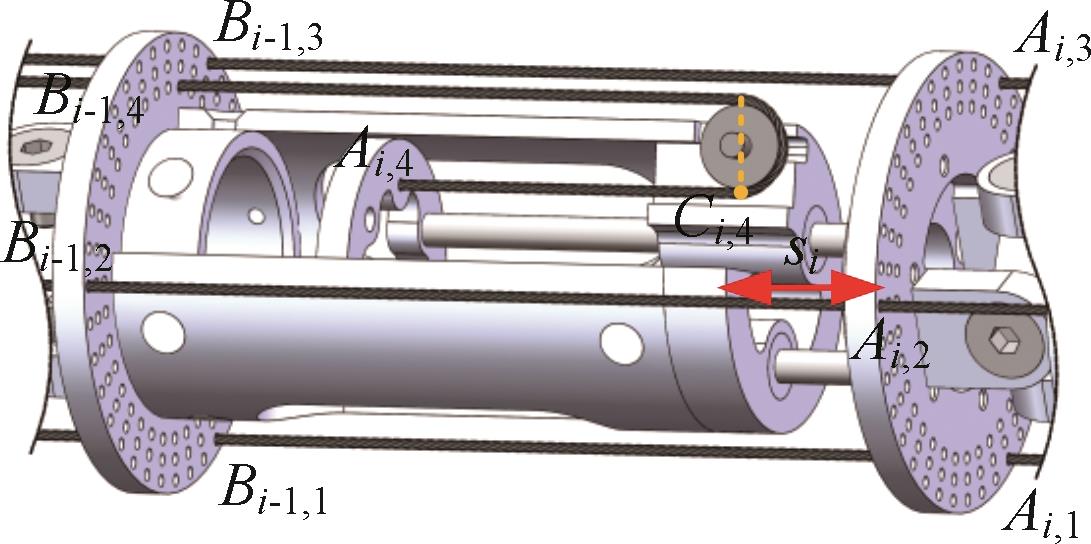
图4 关节单元伸缩自由度模型
Fig.4 Model of extensible DOF in the joint unit
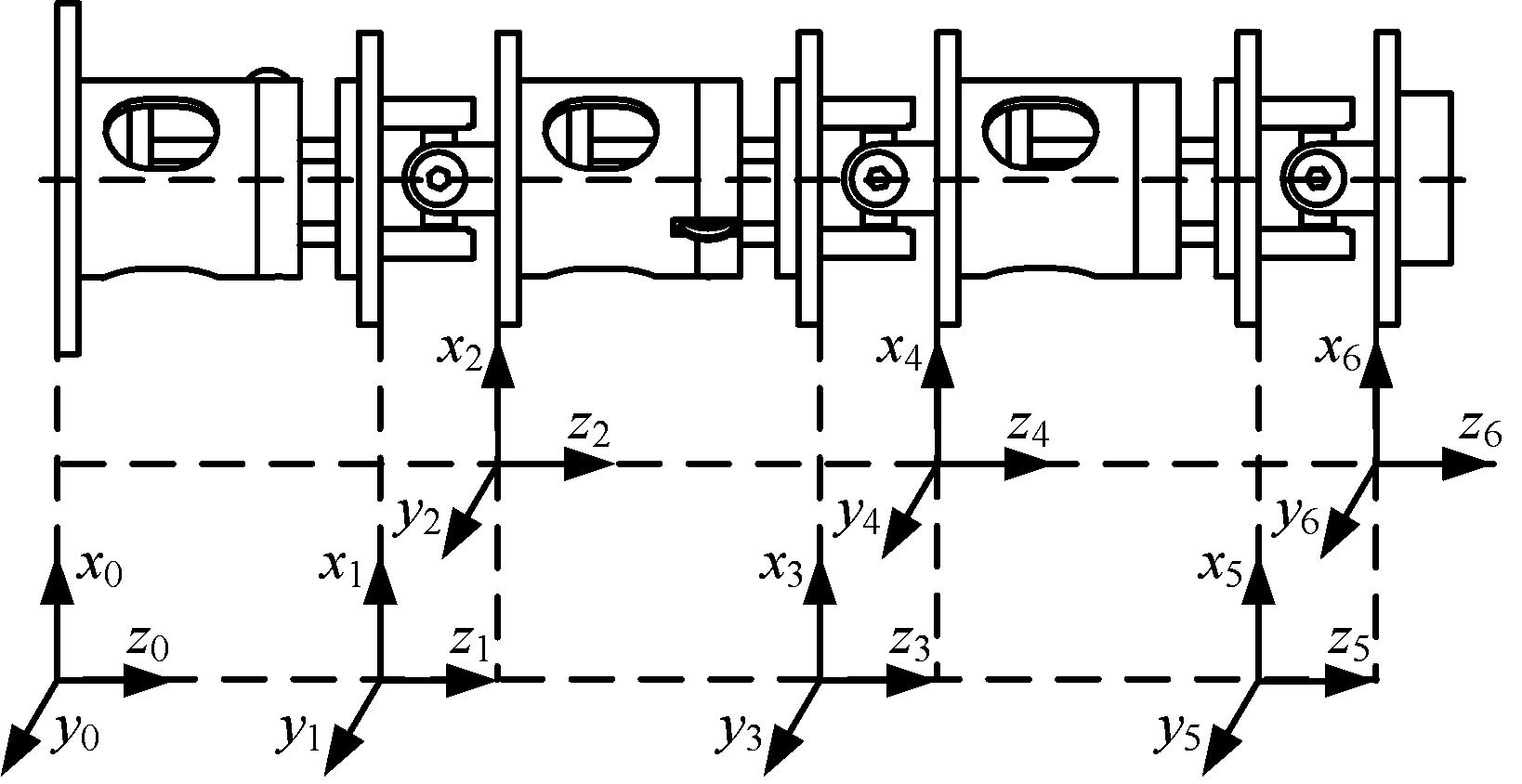
图5 关节坐标系
Fig.5 Joint coordinate systems

图6 逆运动学组合算法流程图
Fig.6 Flow chart of integrated inverse kinematics algorithm
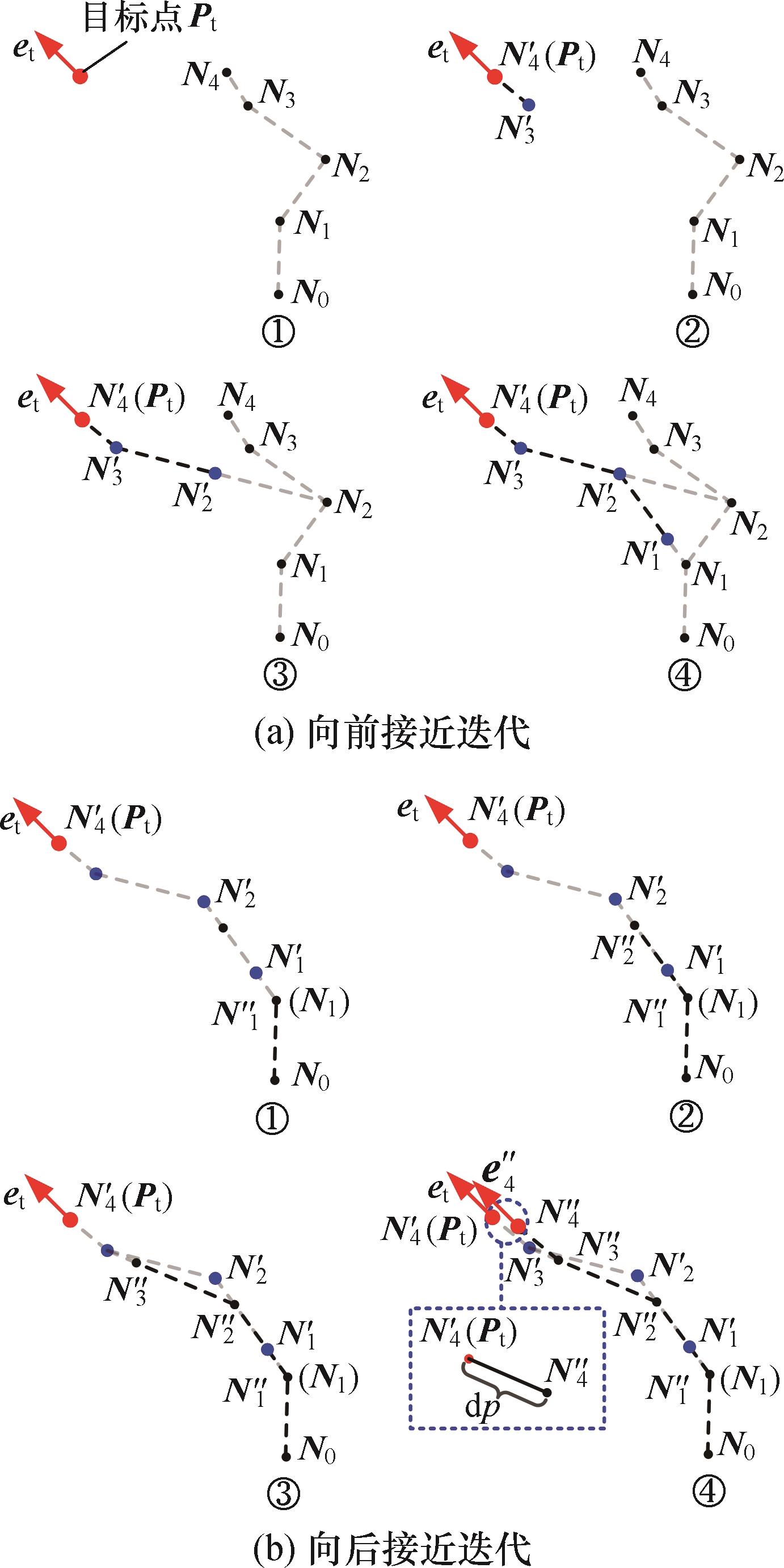
图7 FABRIK算法迭代过程
Fig.7 Iteration of FABRIK algorithm
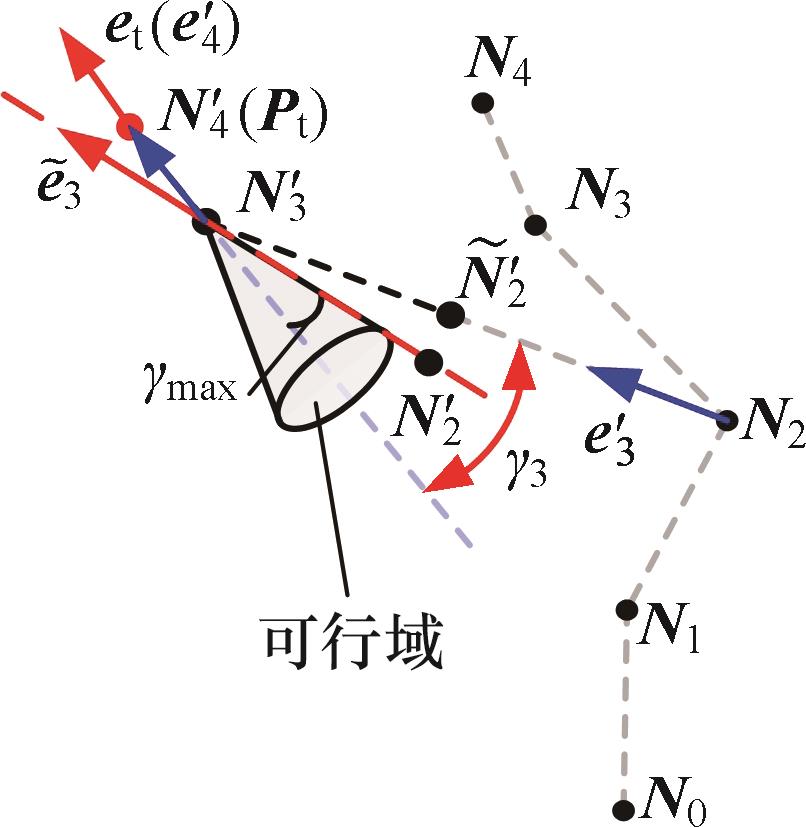
图8 向前接近迭代关节极限回避
Fig.8 Joint limit avoidance in forward reaching iteration
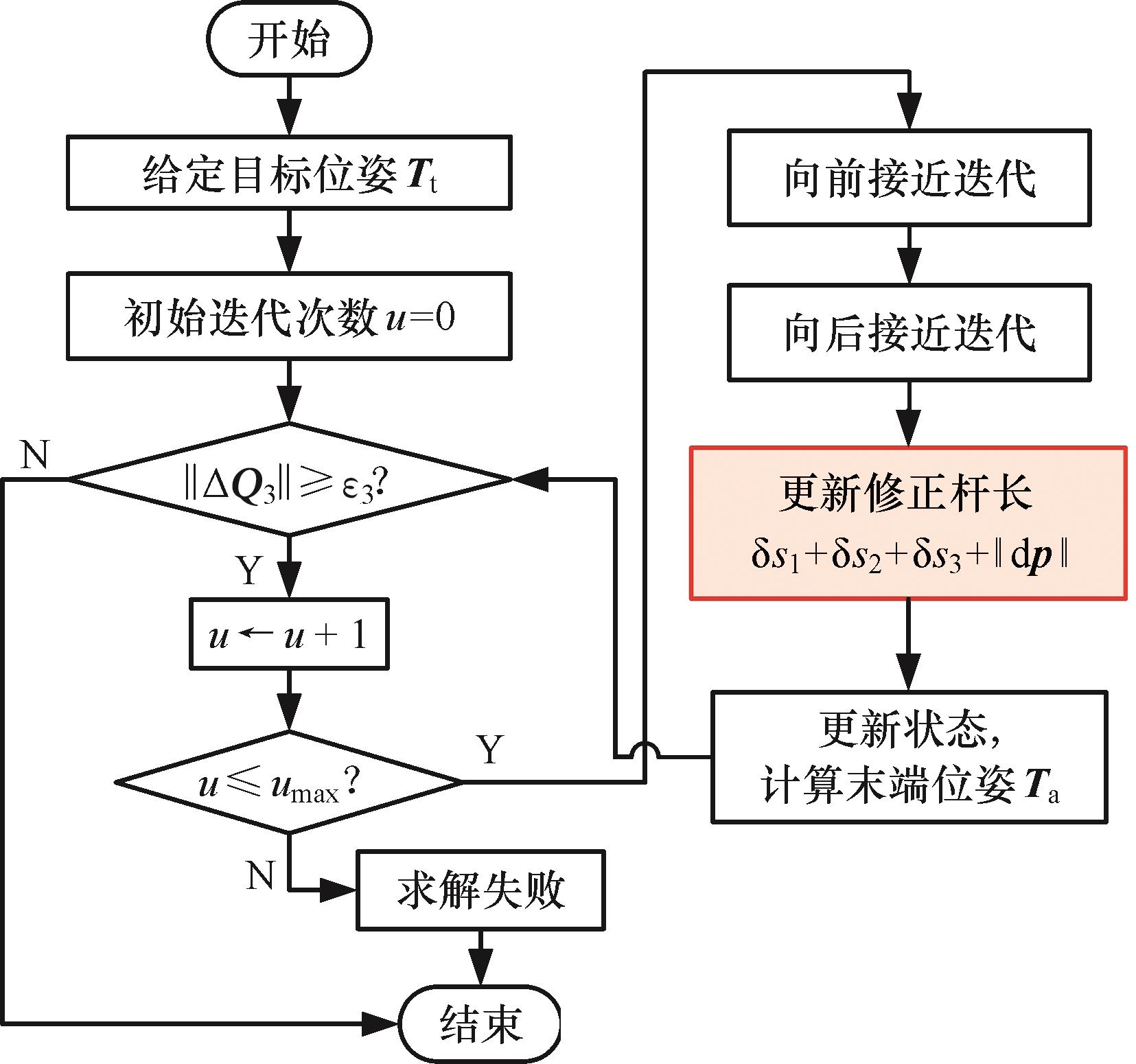
图9 改进的FABRIK算法流程图
Fig.9 Flow chart of the modified FABRIK algorithm
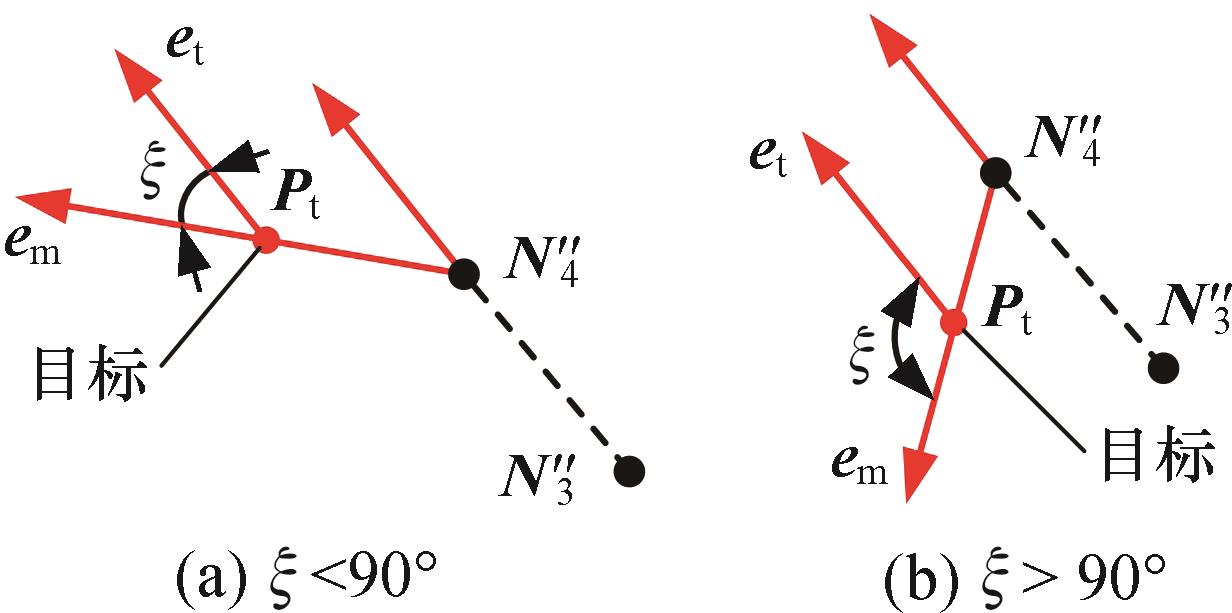
图10 杆长补偿方向确定
Fig.10 Link length compensation direction
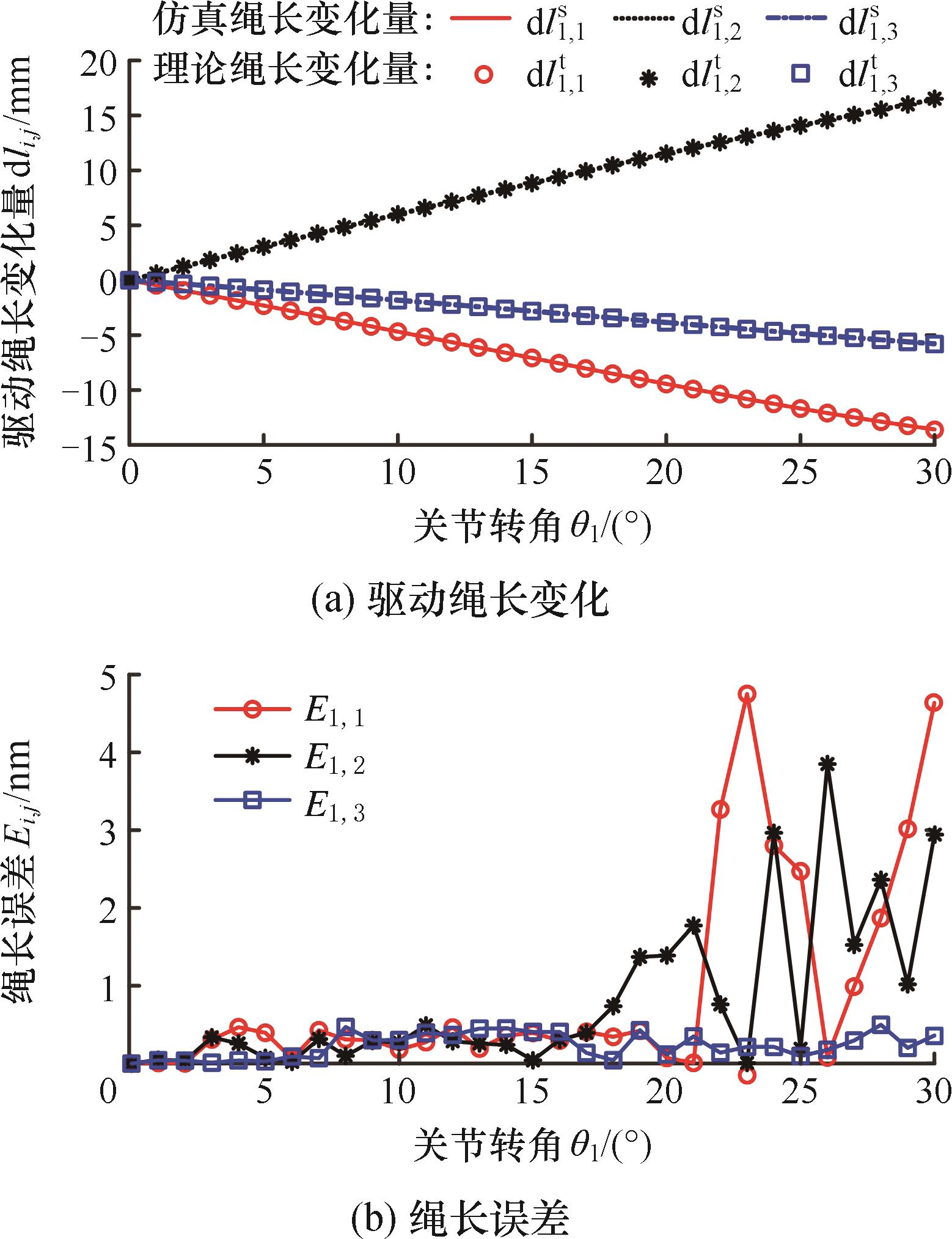
图11 绳长与关节转角关系
Fig.11 Relation cable length errors
| 算法 | 初始解 q0 | 初始解误差 | 计算 时间 t/ms | |
|---|---|---|---|---|
位置误差 dp/mm | 姿态误差 dr/(˚) | |||
基于雅可比 矩阵的迭代法 | (0,0°,0°,0,0°, 0°,0,0°,0°)T | 147.8670 | 0.8689 | 86 |
| 组合算法 | (9.13 mm,12.91°, 22.86°,9.13 mm, 3.30°,5.58°, 9.13 mm,22.77°, 17.92°)T | 6.1303 | 0.0361 | 10.6 |
改进的 FABRIK算法 | — | — | — | 1.7 |
表1 逆运动学算法计算效率
Tab.1 Computational efficiency of inverse kinematics
| 算法 | 初始解 q0 | 初始解误差 | 计算 时间 t/ms | |
|---|---|---|---|---|
位置误差 dp/mm | 姿态误差 dr/(˚) | |||
基于雅可比 矩阵的迭代法 | (0,0°,0°,0,0°, 0°,0,0°,0°)T | 147.8670 | 0.8689 | 86 |
| 组合算法 | (9.13 mm,12.91°, 22.86°,9.13 mm, 3.30°,5.58°, 9.13 mm,22.77°, 17.92°)T | 6.1303 | 0.0361 | 10.6 |
改进的 FABRIK算法 | — | — | — | 1.7 |
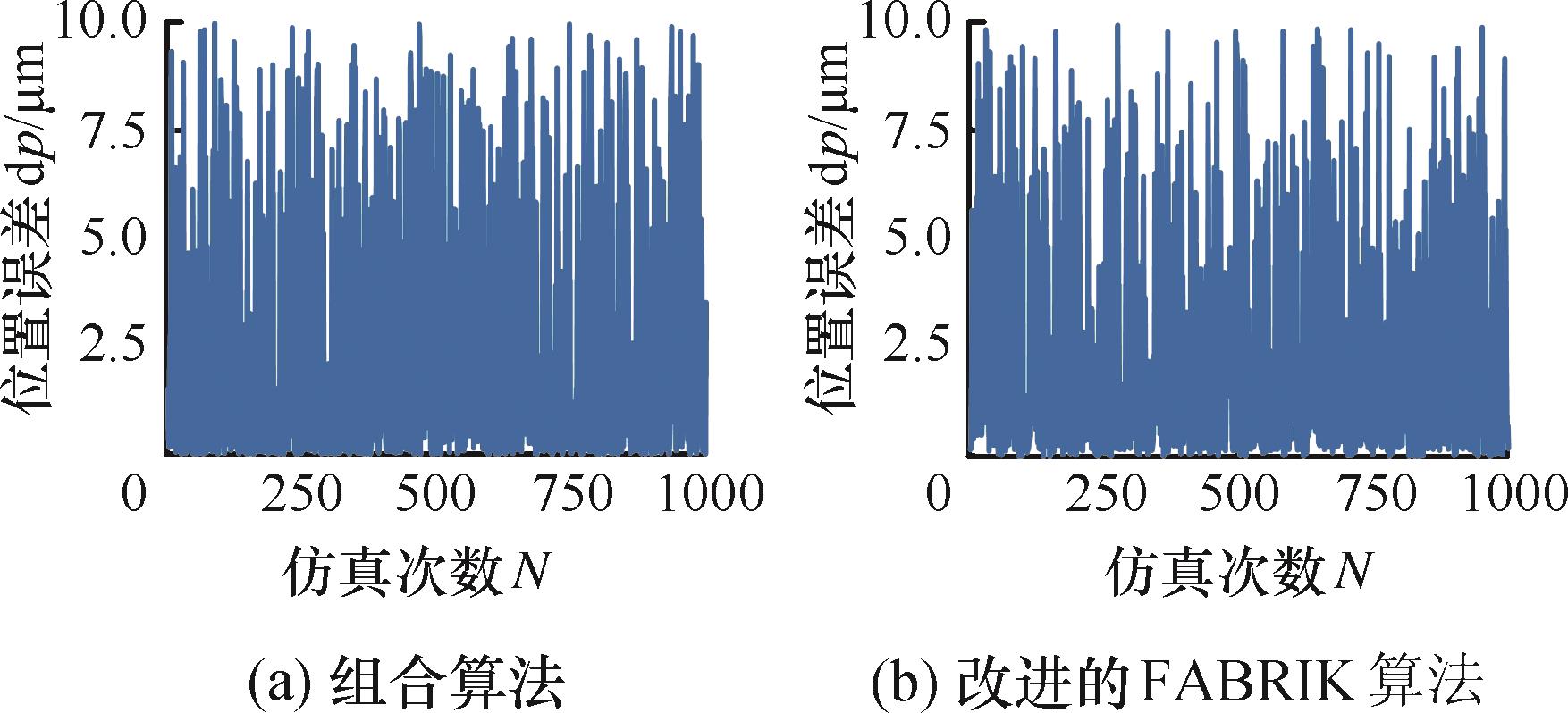
图12 位置误差对比图
Fig.12 Comparison of the position errors
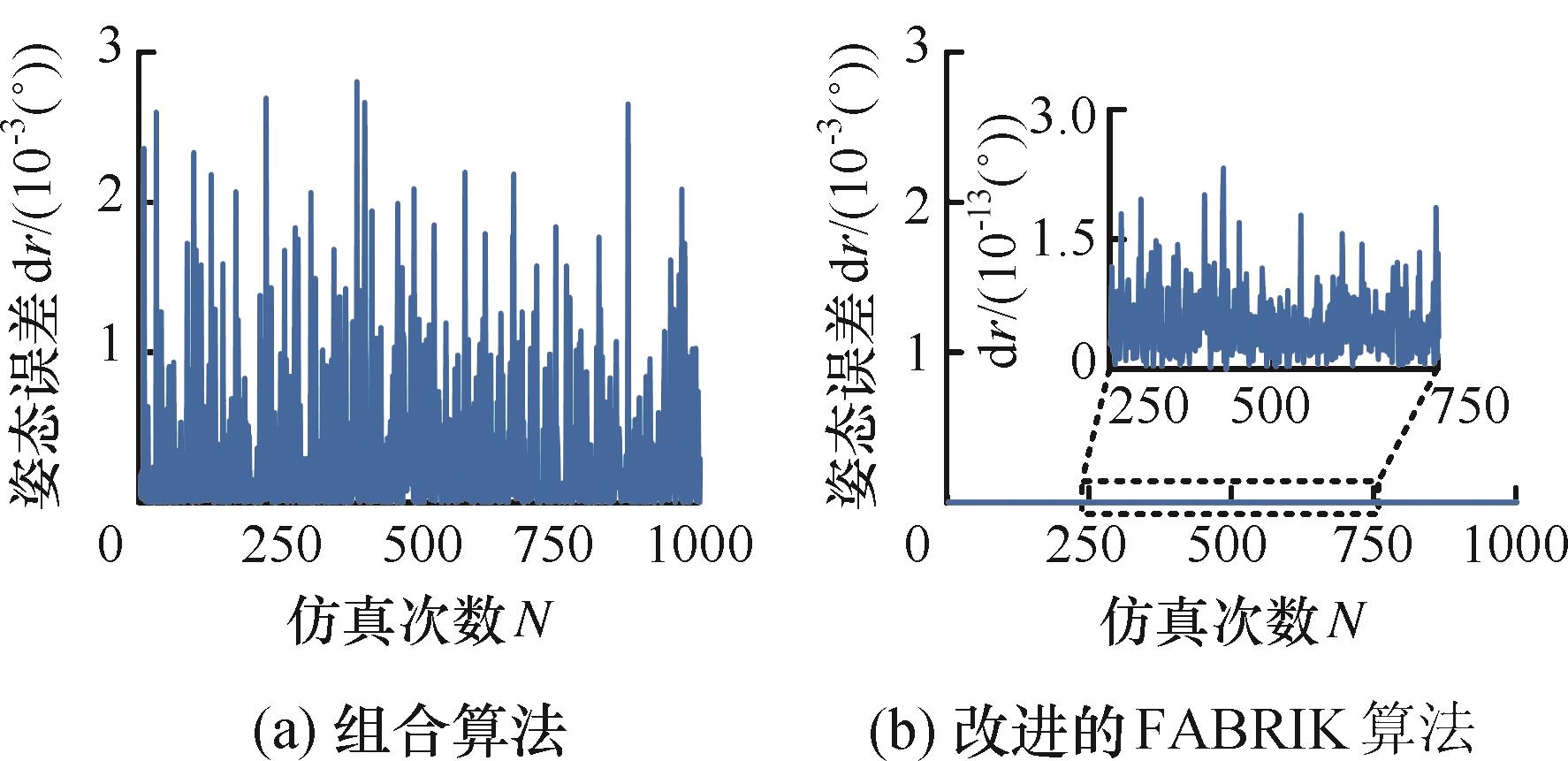
图13 姿态误差对比图
Fig.13 Comparison of the orientation errors
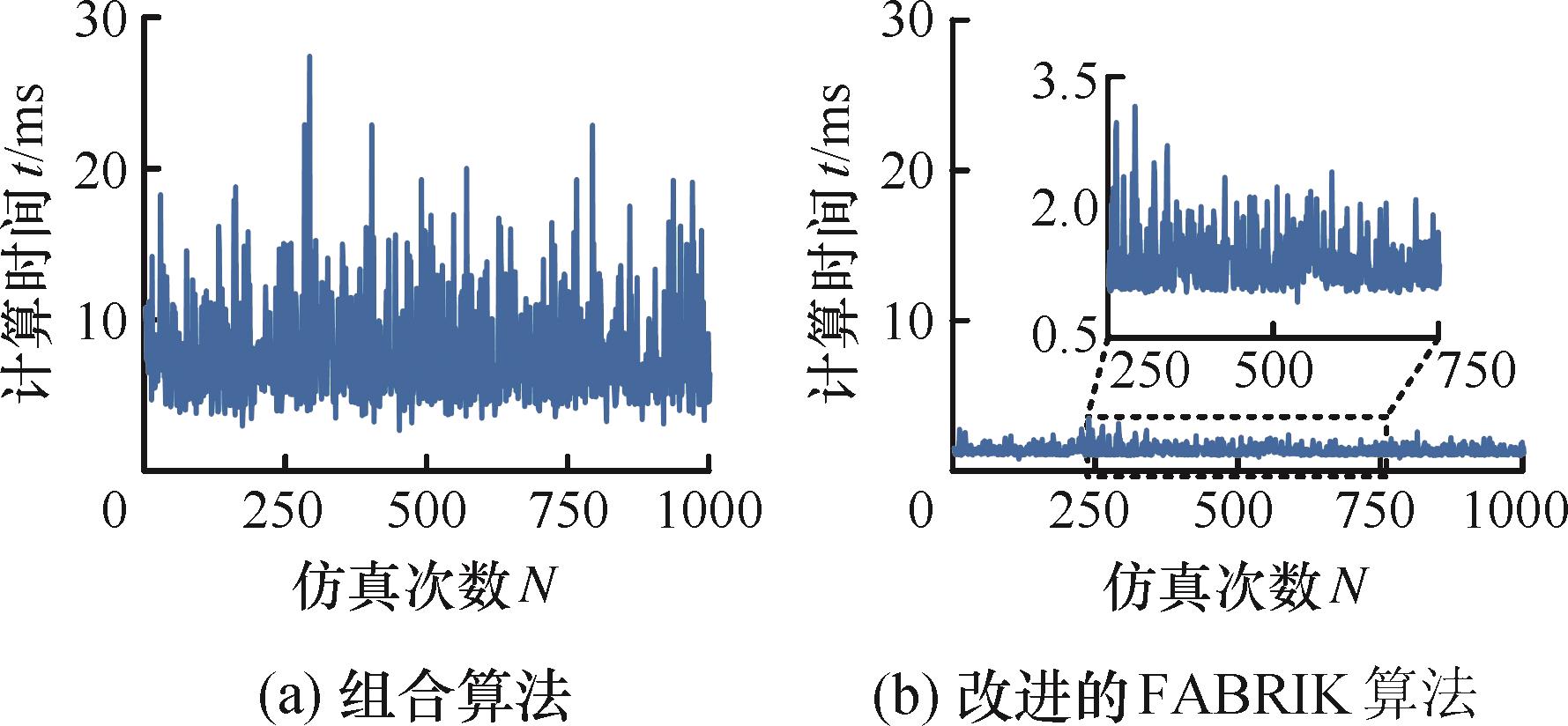
图14 计算时间对比图
Fig.14 Comparison of the operation times
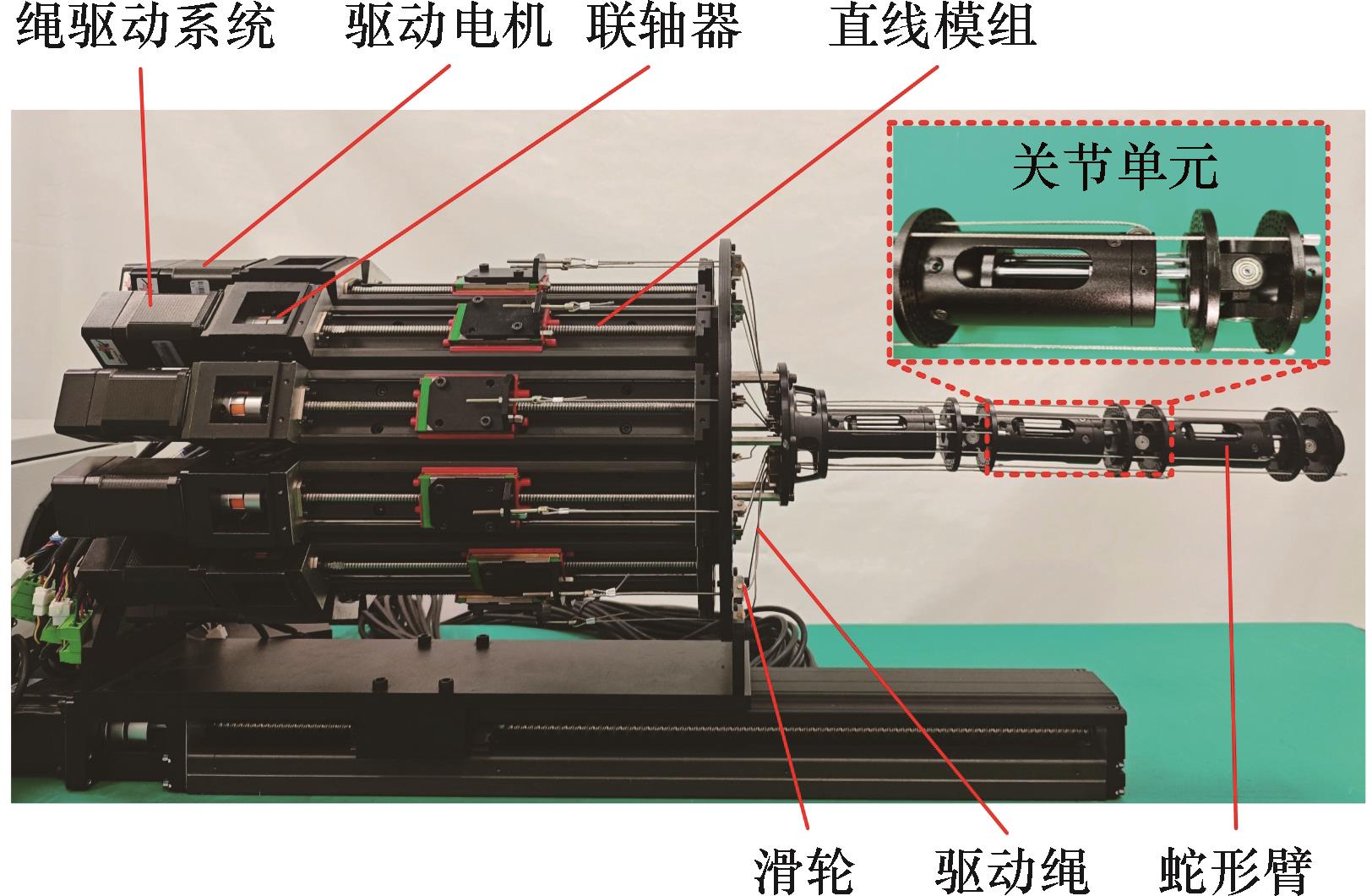
图15 蛇形臂机器人样机
Fig.15 Prototype of the snake-like manipulator
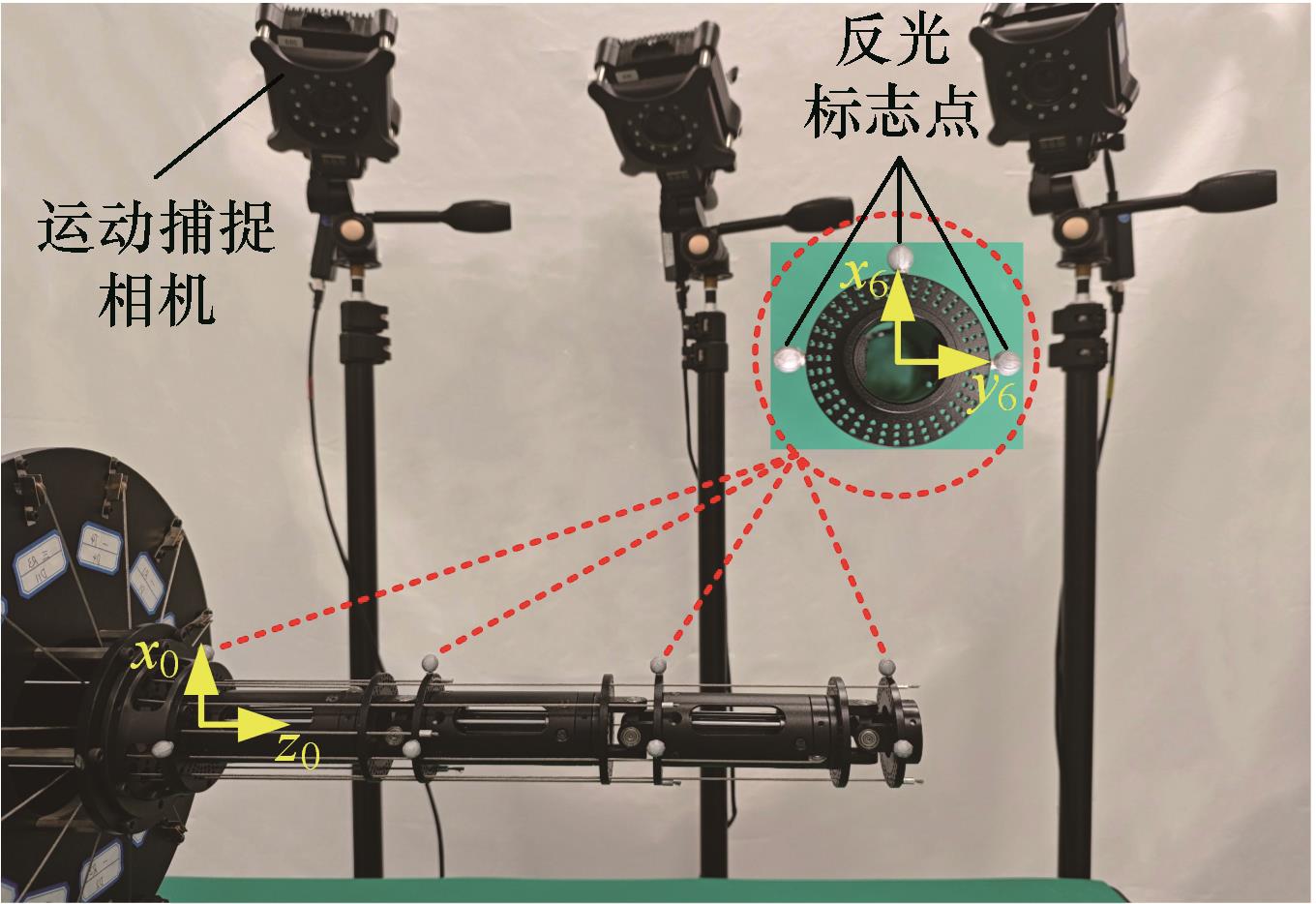
图16 基于动作捕捉系统的测量方案
Fig.16 Measurement scheme based on motion capture system
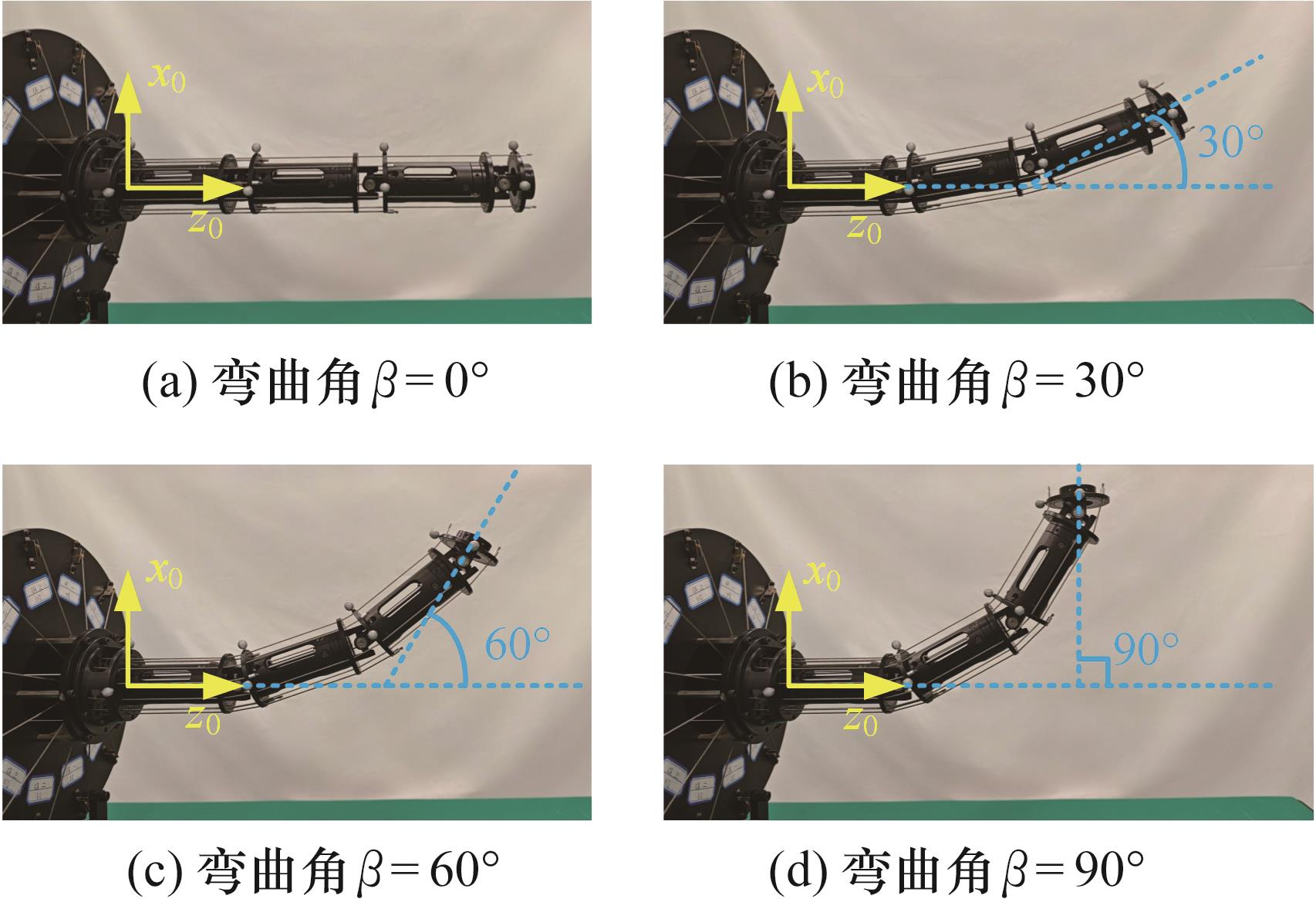
图17 平面弯曲实验
Fig.17 Plane bending experiment
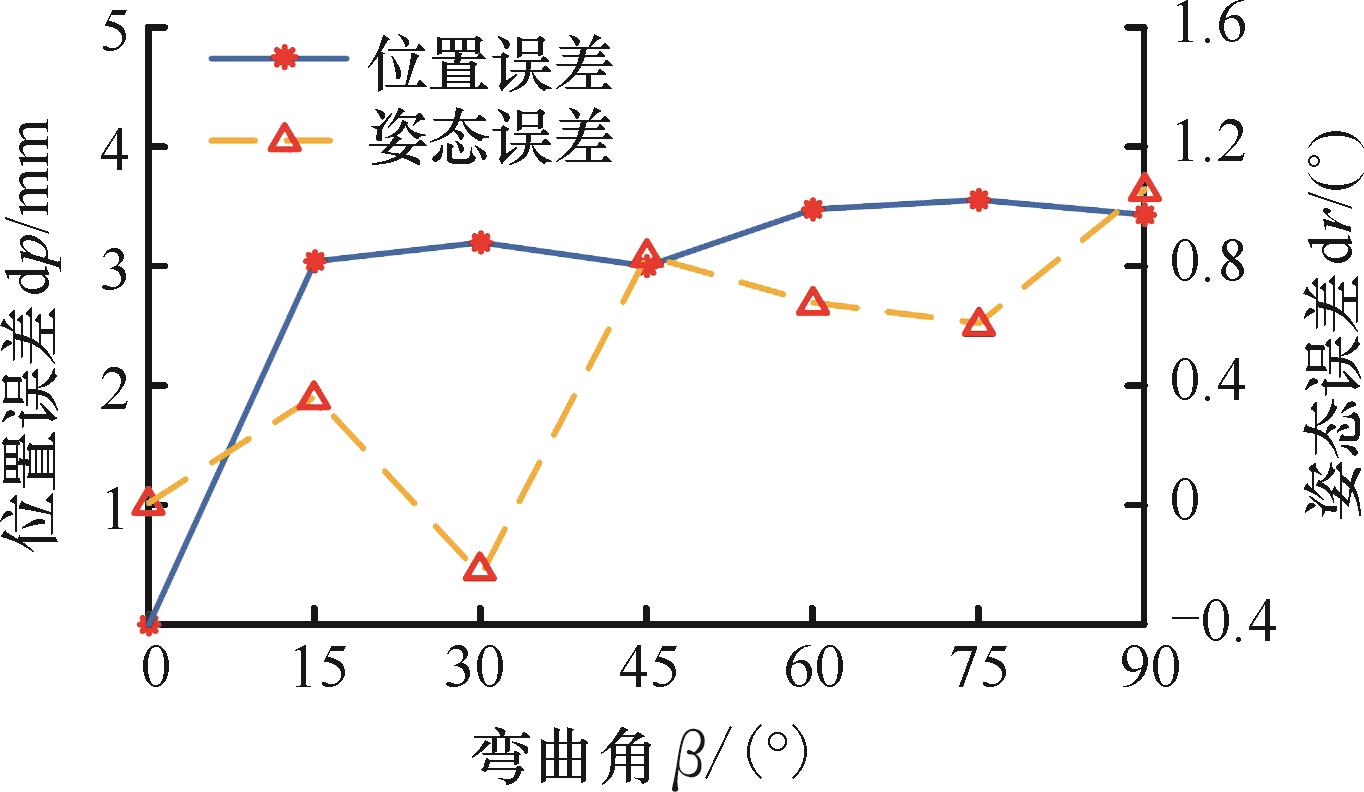
图18 末端位置及姿态误差
Fig.18 End position and orientation errors
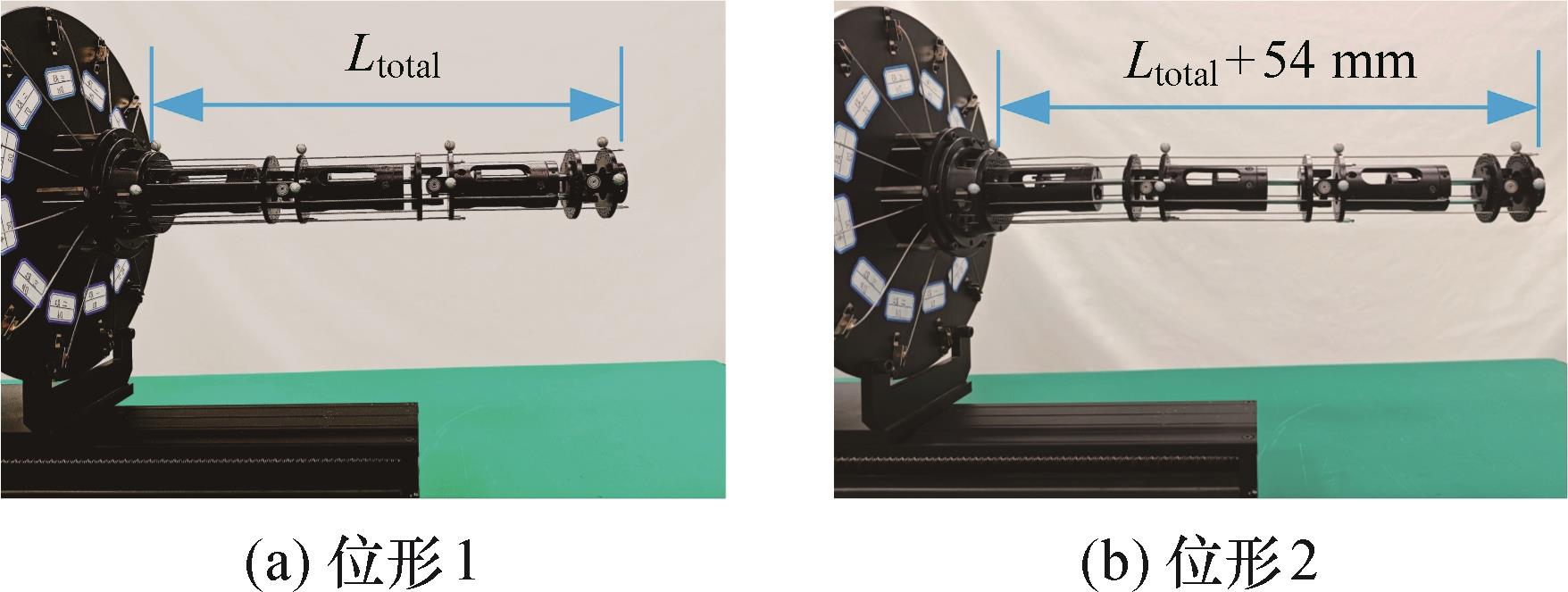
图19 蛇形臂伸长示意图
Fig.19 Extension of the snake-like manipulator
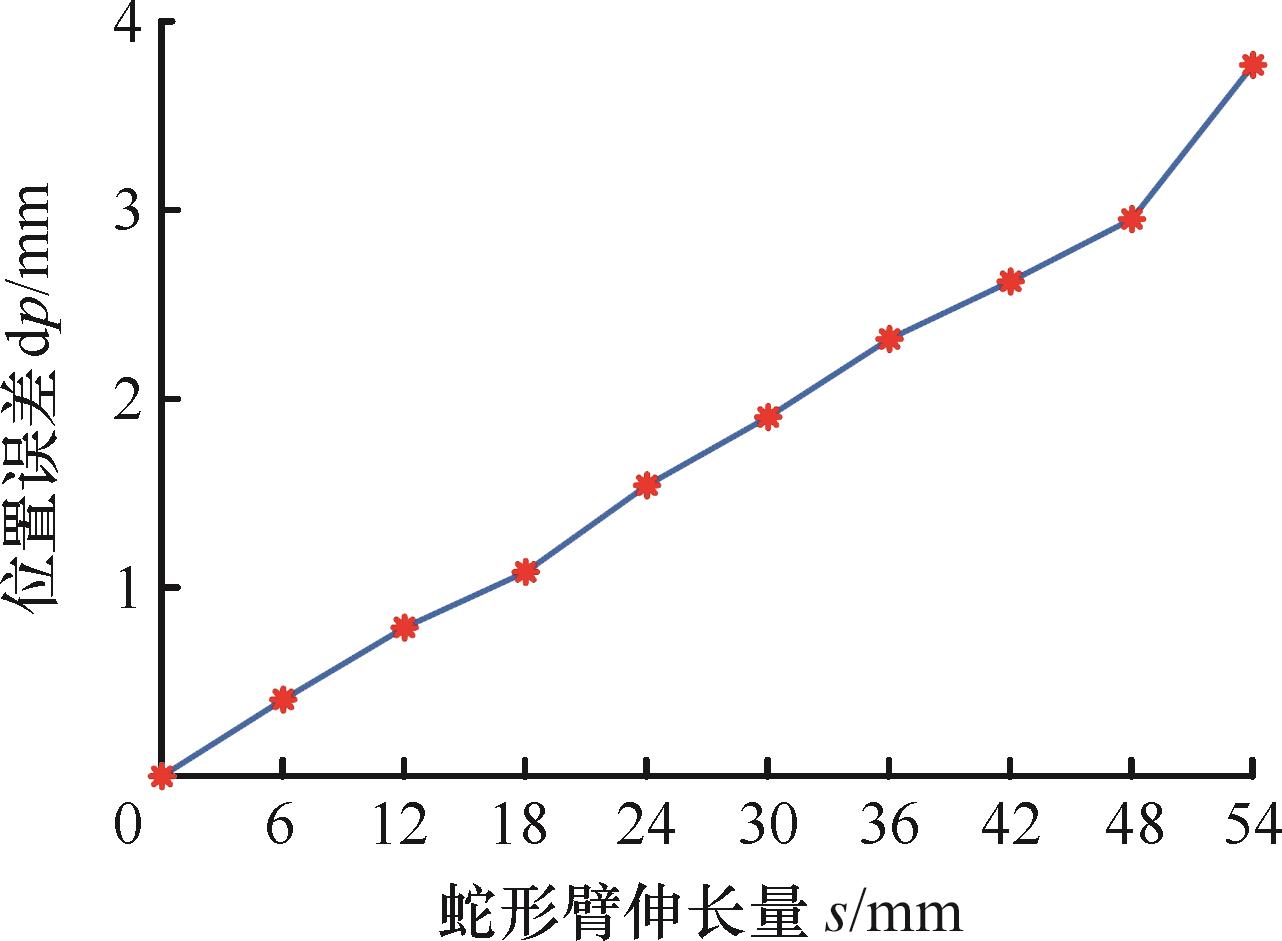
图20 伸缩实验末端位置误差
Fig.20 End position errors under extension experiment
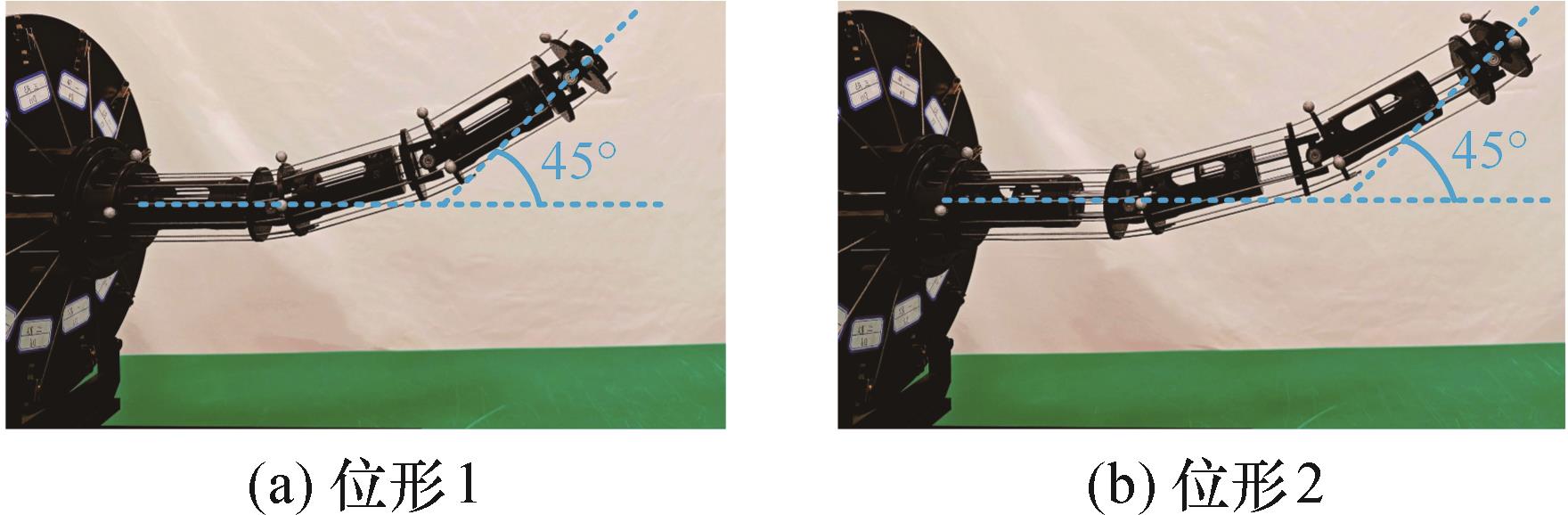
图21 蛇形臂弯曲与伸长运动示意图
Fig.21 Bending and extension of snake-like manipulator
| [1] | RUSSO M, SADATI S M H, DONG Xin. Continuum Robots: an Overview[J]. Advanced Intelligent Systems, 2023, 5(5):2200367. |
| [2] | WANG Fengxu, DONG Haodai, YAN Lei, et al. Development of a Linear Decoupling Cable-driven Manipulator with Independent Driving Joints[J]. Mechatronics, 2024, 100:103192. |
| [3] | 潘琪琪, 罗静静, 王富豪, 等. 切口式单孔腹腔镜连续体手术机器人构型设计和优化[J]. 机械工程学报, 2023, 59(23):55-67. |
| PAN Qiqi, LUO Jingjing, WANG Hongbo, et al. Design and Optimization of Continuum Robot Configuration for Single-port Laparoscopic Surgery[J]. Journal of Mechanical Engineering, 2023, 59(23):55-67. | |
| [4] | 李法民, 郑天江, 沈雯钧, 等. 绳驱动连续体机器人标定方法[J]. 中国机械工程, 2022, 33(2):202-208. |
| LI Famin, ZHENG Tianjiang, SHEN Wenjun, et al. Calibration Method for Cable-driven Continuum Robots[J]. China Mechanical Engineering, 2022, 33(2):202-208. | |
| [5] | 吉爱红, 刘荣兴, 陈辉, 等. 多关节连续体机器人的运动分析与遥操作技术[J]. 中国机械工程, 2021, 32(23):2883-2889. |
| JI Aihong, LIU Rongxing, CHEN Hui, et al. Kinematics Analysis and Teleoperation Technology of Multi-joint Continuum Robots[J]. China Mechanical Engineering, 2021, 32(23):2883-2889. | |
| [6] | ZHENG Yang, WU Baibo, CHEN Yuyang, et al. Design and Validation of Cable-driven Hyper-redundant Manipulator with a Closed-loop Puller-follower Controller[J]. Mechatronics, 2021, 78:102605. |
| [7] | LI Junxiang, XU Wenfu, LI Wenshuo, et al. Design and Development of Composite Linkage Mechanism for Cable-driven Segmented Manipulator to Increase Synchronous Accuracy and Transmission Distance[J]. IEEE Robotics and Automation Letters, 2023, 9(1):25-32. |
| [8] | 齐飞, 张恒, 裴海珊, 等. 基于力传递模型的连续体机器人驱动误差补偿研究[J]. 农业机械学报, 2023, 54(1):402-411. |
| QI Fei, ZHANG Heng, PEI Haishan, et al. Drive Error Compensation of Continuum Manipulator Based on Force Transfer Model[J]. Transactions of the Chinese Society of Agricultural Machinery, 2023, 54(1):402-411. | |
| [9] | YANG Taiwei, JIAN Huang, XU Wenfu, et al. Development of a Cable-driven Redundant Space Manipulator with Large Bending Angle by Combining Quaternion Joints and Segmented Coupled Linkages Mechanism[J]. Chinese Journal of Aeronautics, 2023, 36(11):483-499. |
| [10] | LIU Tong, WANG Xiaojie. Modeling and Analysis of Oblique-chamber and Symmetric Oblique-chamber Pneu-net Soft Actuators[J]. IEEE Robotics and Automation Letters, 2024, 9(10):8682-8689. |
| [11] | HONG Wuzhou, FENG Fan, XIE Lei, et al. A Two-segment Continuum Robot with Piecewise Stiffness for Maxillary Sinus Surgery and Its Decoupling Method[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6):4440-4450. |
| [12] | WANG Mingfeng, DONG Xin, BA Weiming, et al. Design, Modelling and Validation of a Novel Extra Slender Continuum Robot for In-situ Inspection and Repair in Aeroengine[J]. Robotics and Computer-Integrated Manufacturing, 2021, 67:102054. |
| [13] | 雷飞, 刘思宇, 廖峻北,等. 大负载作用下绳驱连续型机器人静力学建模分析[J]. 机械工程学报, 2024, 60(15):28-37. |
| LEI Fei, LIU Siyu, LIAO Junbei, et al. Static Modeling and Analysis of Cable-driven Continuum Robots under Large Load[J]. Journal of Mechanical Engineering, 2024, 60(15):28-37. | |
| [14] | XU Dawei, LI En, LIANG Zize. Kinematics and Statics Analysis of a Novel Cable-driven Snake Arm Robot[C]∥2017 Chinese Automation Congress (CAC). Jinan, 2017:439-444. |
| [15] | ZHUANG Zheming, ZHANG Ze, GUAN Yuntao, et al. Design and Control of SLPM-based Extensible Continuum Arm[J]. Journal of Mechanisms and Robotics, 2022, 14(6):061003. |
| [16] | WANG Pengyuan, DENG Binchen, HE Zongbo, et al. Extensible Continuum Manipulator Toward In-situ Explosive Ordnance Disposal[J]. Journal of Mechanisms and Robotics, 2023, 15(5):051013. |
| [17] | MAVINKURVE U, KANADA A, TAFRISHI S A, et al. Geared Rod-driven Continuum Robot with Woodpecker-inspired Extension Mechanism and IMU-based Force Sensing[J]. IEEE Robotics and Automation Letters, 2023, 9(1):135-142. |
| [18] | WANG Xuhao, WANG Chengfa, WU Mengli, et al. Design and Kinematics of a Novel Continuum Robot Connected by Unique Offset Cross Revolute Joints[J]. Journal of Mechanisms and Robotics, 2024, 16:121003-1. |
| [19] | WANG Xuhao, ZHANG Dawei, ZHAO Chen. The Inverse Kinematics of a 7R 6-degree-of-freedom Robot with Non-spherical Wrist[J]. Advances in Mechanical Engineering, 2017, 9(8):1-11. |
| [20] | MU Zonggao, YUAN Han, XU Wenfu, et al. A Segmented Geometry Method for Kinematics and Configuration Planning of Spatial Hyper-redundant Manipulators[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, 50(5):1746-1756. |
| [21] | 万俊, 姚佳烽, 余亮, 等. 基于伪距离的冗余机器人避障算法[J]. 机械工程学报, 2020, 56(17):59-70. |
| WAN Jun, YAO Jiafeng, YU Liang, et al. Obstacle Avoidance Algorithm for Redundant Manipulators Based on Pseudo-distance Method [J]. Journal of Mechanical Engineering, 2020, 56(17):59-70. | |
| [22] | NIU Pingan, HAN Liang, HUANG Yunzhi, et al. Shape-controllable Inverse Kinematics of Hyper-redundant Robots Based on the Improved FABRIK Method[J]. Robotica, 2024, 42(1):225-241. |
| [1] | 董佳祥, 刘铨权, 胡希平, 赵学智. 新型刚柔混联连续体机器人运动建模[J]. 中国机械工程, 2025, 36(11): 2678-2684. |
| [2] | 陈武超, 俞翔栋, 何昆, 张济民. 模块化多胞元永磁推力轴承的承载特性[J]. 中国机械工程, 2025, 36(10): 2300-2305. |
| [3] | 唐欣尧, 殷榕, 王旭鹏, 杨佳音, 刘晓宜, 郝雨阳. 膝踝关节外骨骼人机匹配性设计与优化[J]. 中国机械工程, 2025, 36(10): 2369-2378. |
| [4] | 尚欣1, 陈宇2. 刚强约束的主轴结构设计研究[J]. 中国机械工程, 2025, 36(05): 995-1007. |
| [5] | 张志刚1, 靳勇利1, 王栋银1, 付志军1, 秦国栋2. 基于动力学降噪模型的蛇形臂机器人末端轨迹跟随算法[J]. 中国机械工程, 2025, 36(03): 407-413. |
| [6] | 王志强1, 韩建海1, 2, 3, 李向攀1, 2, 郭冰菁1, 2, 杜敢琴4. 冗余机器人的笛卡儿空间螺旋线性插值轨迹规划[J]. 中国机械工程, 2025, 36(01): 104-112. |
| [7] | 陈卓凡, 周坤, 秦菲菲, 王斌锐. 基于改进量子粒子群优化算法的机器人逆运动学求解#br#
#br#
[J]. 中国机械工程, 2024, 35(02): 293-304. |
| [8] | 高子乔, 董九志, 陈云军, 蒋秀明, . 单边双针双线摆动缝合轨迹设计及实验验证[J]. 中国机械工程, 2024, 35(01): 102-108. |
| [9] | 朱玉龙, 赵迎松, 方阳, 陈洪恩, 陈振茂, . 孔边裂纹的旋转涡流检测[J]. 中国机械工程, 2023, 34(08): 883-891. |
| [10] | 李冲, 童玉健, 梁康, 钟伟, 方记文. 压电驱动微型精密夹持机构设计与实验研究[J]. 中国机械工程, 2022, 33(11): 1302-1308,1385. |
| [11] | 刘雪梅, 冯焱, 杨振, 李爱平, 卢军国. 冗余机器人喷涂系统改进人工鱼群逆运动学求解算法[J]. 中国机械工程, 2022, 33(11): 1317-1323. |
| [12] | 郑红梅, 郑明睿, 陈科, 史洪扬, 殷磊, . 整体双层盘式永磁涡流联轴器及其转矩特性分析[J]. 中国机械工程, 2021, 32(20): 2395-2402. |
| [13] | 张横, 丁晓红, 沈磊, 徐世鹏. 考虑连接性的三明治阻尼复合结构拓扑优化设计[J]. 中国机械工程, 2021, 32(20): 2403-2410. |
| [14] | 张歆研, 王英, 胡鹏科, 汪锐, 束学道. 锥形端坯料辊切成形装置设计与实验[J]. 中国机械工程, 2021, 32(17): 2100-2107. |
| [15] | 刘秀莹, 张建军, 刘承磊, 牛建业, 戚开诚, 郭士杰. 基于工作空间的踝关节康复广义球面并联机器人运动学参数优化[J]. 中国机械工程, 2021, 32(16): 1921-1929. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||