


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (1): 243-253.DOI: 10.3969/j.issn.1004-132X.2026.01.025
• 工程前沿 • 上一篇
田立勇1( ), 李鸣昊1, 于宁1, 杨秀宇1,2
), 李鸣昊1, 于宁1, 杨秀宇1,2
收稿日期:2024-11-13
出版日期:2026-01-25
发布日期:2026-02-05
作者简介:田立勇*,男,1979年生,教授、博士研究生导师。研究方向为煤矿装备自动化与智能化。发表论文52篇。E-mail:tianliyong@lntu.edu.cn
基金资助:
TIAN Liyong1(), LI Minghao1, YU Ning1, YANG Xiuyu1,2
Received:2024-11-13
Online:2026-01-25
Published:2026-02-05
摘要:
为提高锚网绑扎效率及质量,设计了一种锚网自动绑扎装置。基于发明问题解决理论对手持执行器、动力驱动装置、软轴传动机构进行了结构设计,并建立了锚网自动绑扎装置的三维模型。建立了无刷直流电机可换向调速控制系统模型,电机响应速度、输出扭矩均满足绑扎需求。分析了软轴扭转角,发现最大扭转角为49.560°,电机运行滞后时间为0.017s。依据设计参数制作了样机,10组锚网绑扎测试的平均绑扎时间为1.8 s,装置各机构动作与仿真结果相符。
中图分类号:
田立勇, 李鸣昊, 于宁, 杨秀宇. 煤矿掘进工作面锚网自动绑扎装置研究[J]. 中国机械工程, 2026, 37(1): 243-253.
TIAN Liyong, LI Minghao, YU Ning, YANG Xiuyu. Research on Automatic Binding Devices for Anchor Net in Coal Mine Excavation Working Faces[J]. China Mechanical Engineering, 2026, 37(1): 243-253.
| 问题 | 改善因素 | 恶化因素 | |
|---|---|---|---|
| 可操作性 | 装置的复杂性 | ||
| 绑扎效率低 | 自动化程度、生产率 | 分割原理、嵌套原理、预处理原理、机械系统替换原理 | 等势原理、转变到新维度原理、中介物原理、机械系统替换原理 |
| 绑扎强度低,受力易失效 | 强度、可靠性 | 分割原理、合并原理、多用性原理、动态化原理、复合材料原理 | 分割原理、嵌套原理、部分或超额行动原理、中介物原理 |
| 电机驱动功率过高,无法在井下使用 | 功率、物体外部有害因素作用的敏感性 | 等势原理、机械系统替换原理、同质性原理、改变特性原理 | 分割原理、合并原理、多用性原理、有效动作的连续性原理、抛弃和再生部件原理 |
| 电机壳体较薄,无法达到防爆标准 | 结构稳定性、物体外部有害因素作用的敏感性 | 分割原理、抽取原理、多用性原理、预处理原理、中介物原理 | 动态化原理、有效动作的连续性原理、中介物原理、自服务原理 |
| 适用性较低 | 适应性及多用性 | 分割原理、动态化原理、部分或超额行动原理、机械系统替换原理 | 多用性原理、嵌套原理、反过来做原理、动态化原理、气动或液压结构原理 |
表1 矛盾分析表
Tab.1 Contradiction analysis table
| 问题 | 改善因素 | 恶化因素 | |
|---|---|---|---|
| 可操作性 | 装置的复杂性 | ||
| 绑扎效率低 | 自动化程度、生产率 | 分割原理、嵌套原理、预处理原理、机械系统替换原理 | 等势原理、转变到新维度原理、中介物原理、机械系统替换原理 |
| 绑扎强度低,受力易失效 | 强度、可靠性 | 分割原理、合并原理、多用性原理、动态化原理、复合材料原理 | 分割原理、嵌套原理、部分或超额行动原理、中介物原理 |
| 电机驱动功率过高,无法在井下使用 | 功率、物体外部有害因素作用的敏感性 | 等势原理、机械系统替换原理、同质性原理、改变特性原理 | 分割原理、合并原理、多用性原理、有效动作的连续性原理、抛弃和再生部件原理 |
| 电机壳体较薄,无法达到防爆标准 | 结构稳定性、物体外部有害因素作用的敏感性 | 分割原理、抽取原理、多用性原理、预处理原理、中介物原理 | 动态化原理、有效动作的连续性原理、中介物原理、自服务原理 |
| 适用性较低 | 适应性及多用性 | 分割原理、动态化原理、部分或超额行动原理、机械系统替换原理 | 多用性原理、嵌套原理、反过来做原理、动态化原理、气动或液压结构原理 |
| 发明原理 | 经典TRIZ释义 | 具体设计方案 |
|---|---|---|
| 分割原理 | 将物体分成独立或可拆卸的部分,以便于制造、组装、拆卸、运输、存储。 | 锚网自动绑扎装置主要由手持执行器、传动软轴、动力驱动装置组成,各部分可单独拆卸、组装,便于井下工人运输及维修。 |
| 多用性原理 | 具有多种功能。 | 手持执行器设有储丝装置、绑扎机构,可实现自动送丝、切丝、拧丝,无需采用其他装置辅助。 |
| 动态化原理 | 调整性能,在工作的各个阶段达到最优状态。 | 动力驱动装置壳体采用隔爆处理,满足井下作业要求;内部的PLC控制器可调节电机转速、转向,满足不同粗细、松紧程度的锚网绑扎作业要求。 |
| 中介物原理 | 使用中介物传递或转换能量、信息或物质,以改善性能或降低成本。 | 井下工作环境复杂,利用传动软轴连接手持执行器与动力驱动装置,可保证动力传输的平稳性;无线方式传输信号满足井下装置本安型要求。 |
| 机械系统代替原理 | 用机械系统代替非机械系统或改变现有机械系统的布局,以提高效率、降低成本或增加灵活性。 | 新型钢丝绑扎机构代替气动连扣机的气动射钉机构,可极大改善绑扎效果,提高绑扎质量。 |
表2 发明原理
Tab.2 Invention principles
| 发明原理 | 经典TRIZ释义 | 具体设计方案 |
|---|---|---|
| 分割原理 | 将物体分成独立或可拆卸的部分,以便于制造、组装、拆卸、运输、存储。 | 锚网自动绑扎装置主要由手持执行器、传动软轴、动力驱动装置组成,各部分可单独拆卸、组装,便于井下工人运输及维修。 |
| 多用性原理 | 具有多种功能。 | 手持执行器设有储丝装置、绑扎机构,可实现自动送丝、切丝、拧丝,无需采用其他装置辅助。 |
| 动态化原理 | 调整性能,在工作的各个阶段达到最优状态。 | 动力驱动装置壳体采用隔爆处理,满足井下作业要求;内部的PLC控制器可调节电机转速、转向,满足不同粗细、松紧程度的锚网绑扎作业要求。 |
| 中介物原理 | 使用中介物传递或转换能量、信息或物质,以改善性能或降低成本。 | 井下工作环境复杂,利用传动软轴连接手持执行器与动力驱动装置,可保证动力传输的平稳性;无线方式传输信号满足井下装置本安型要求。 |
| 机械系统代替原理 | 用机械系统代替非机械系统或改变现有机械系统的布局,以提高效率、降低成本或增加灵活性。 | 新型钢丝绑扎机构代替气动连扣机的气动射钉机构,可极大改善绑扎效果,提高绑扎质量。 |
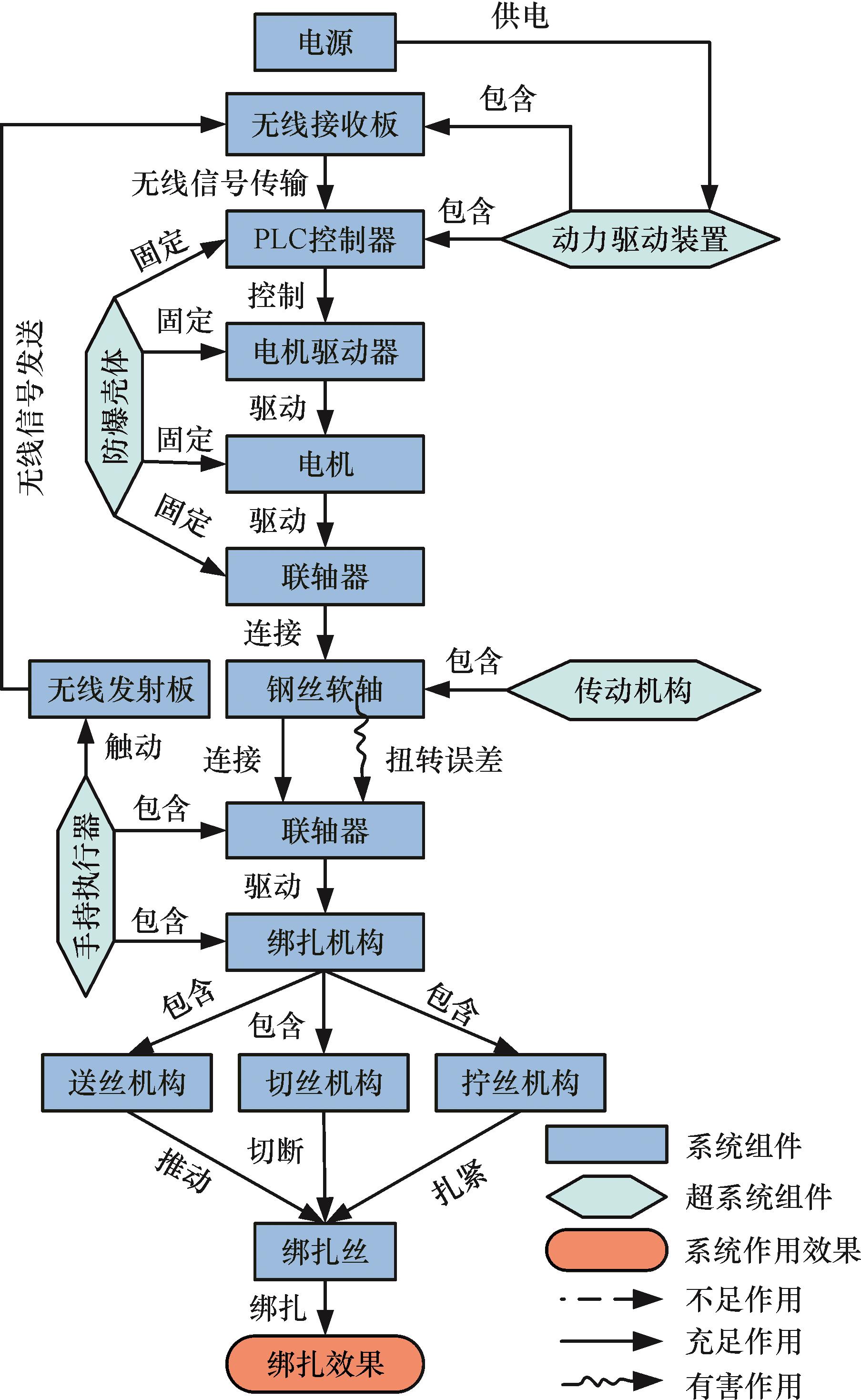
图1 锚网自动绑扎装置功能模型
Fig.1 Function model of anchor net automatic binding device
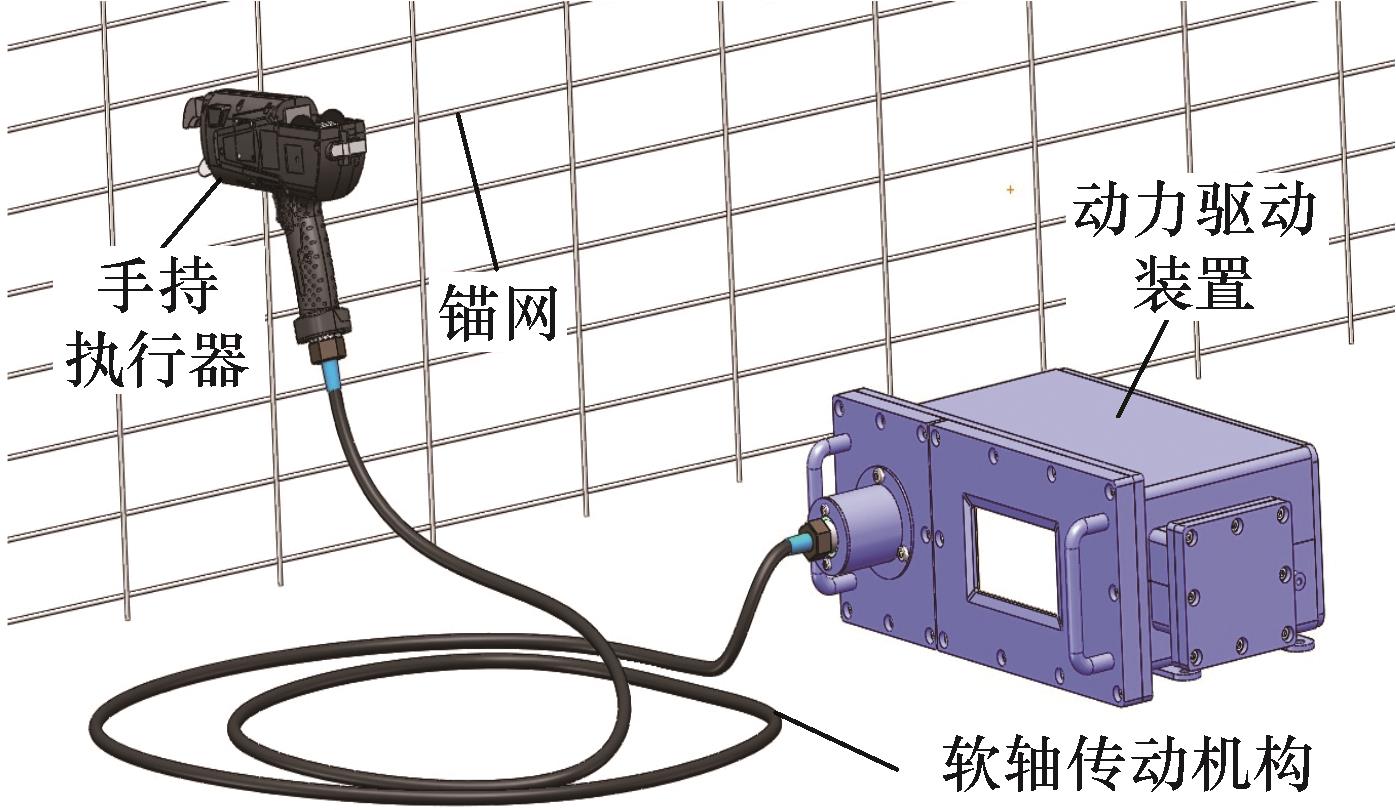
图2 锚网自动绑扎装置整体结构示意图
Fig.2 Schematic diagram of the overall structure of the anchor net automatic binding device
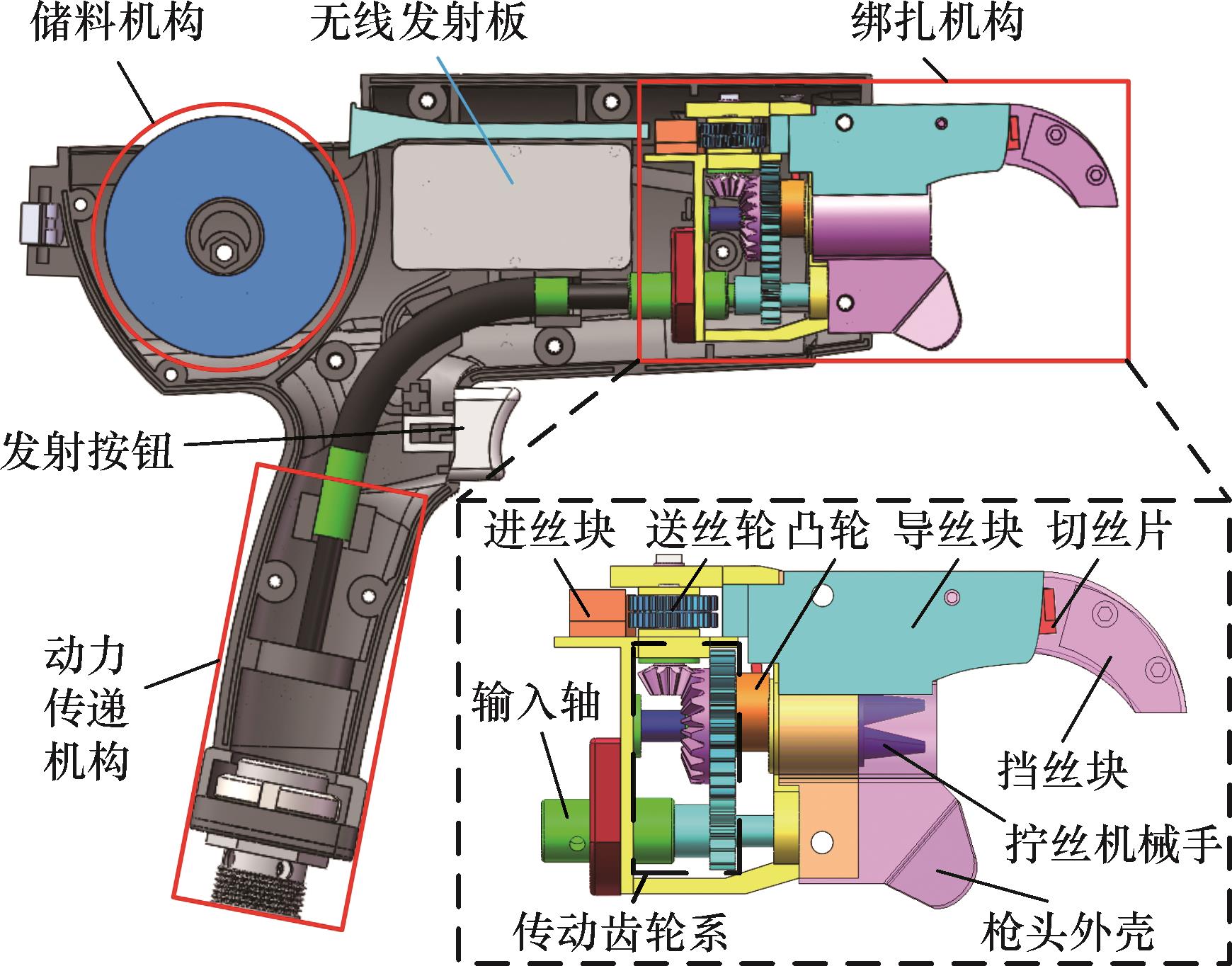
图3 手持执行器结构示意图
Fig.3 Schematic diagram of handheld actuator structure
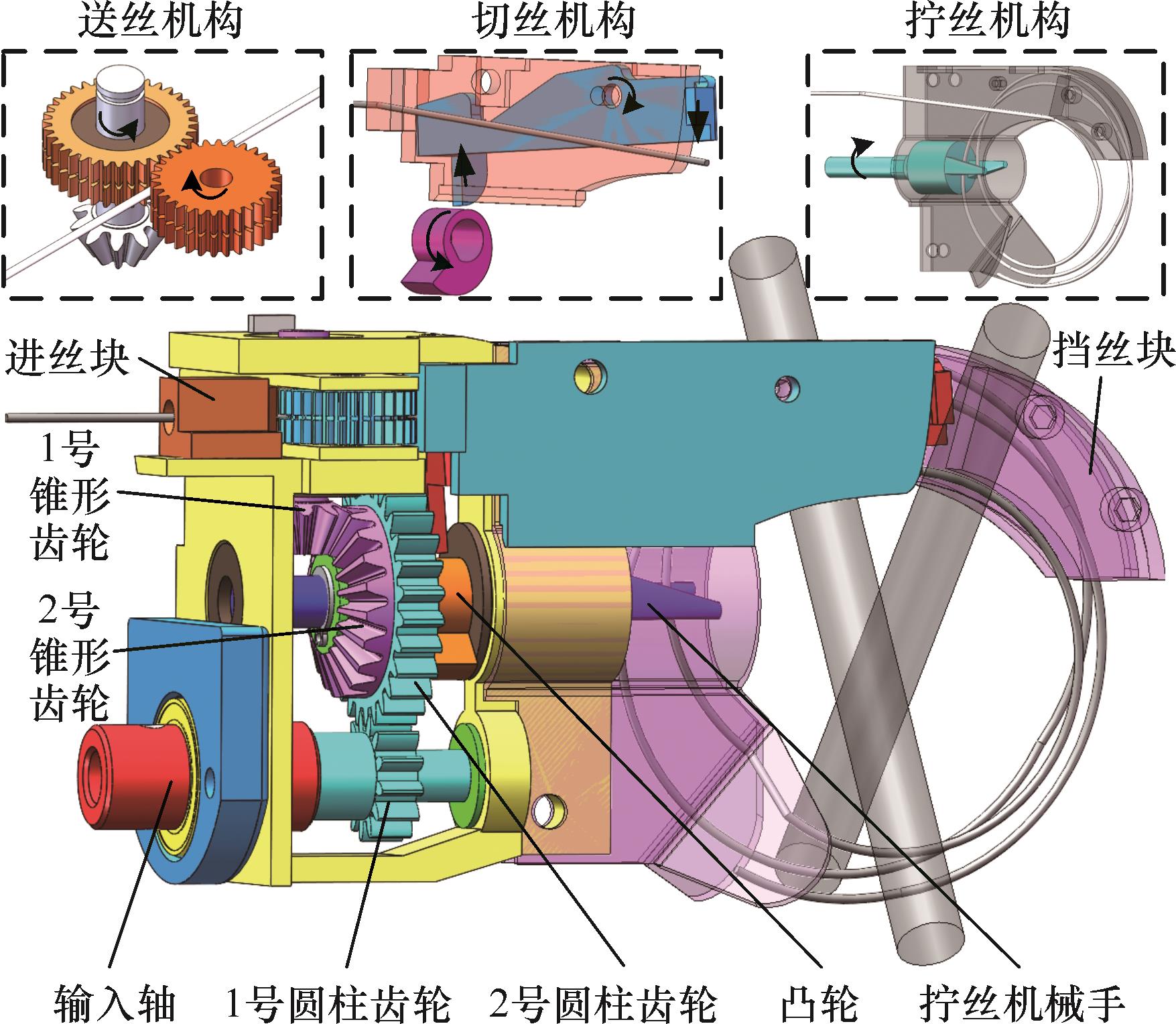
图4 绑扎机构绑扎锚网原理图
Fig.4 Schematic diagram of binding mechanism binding anchor net
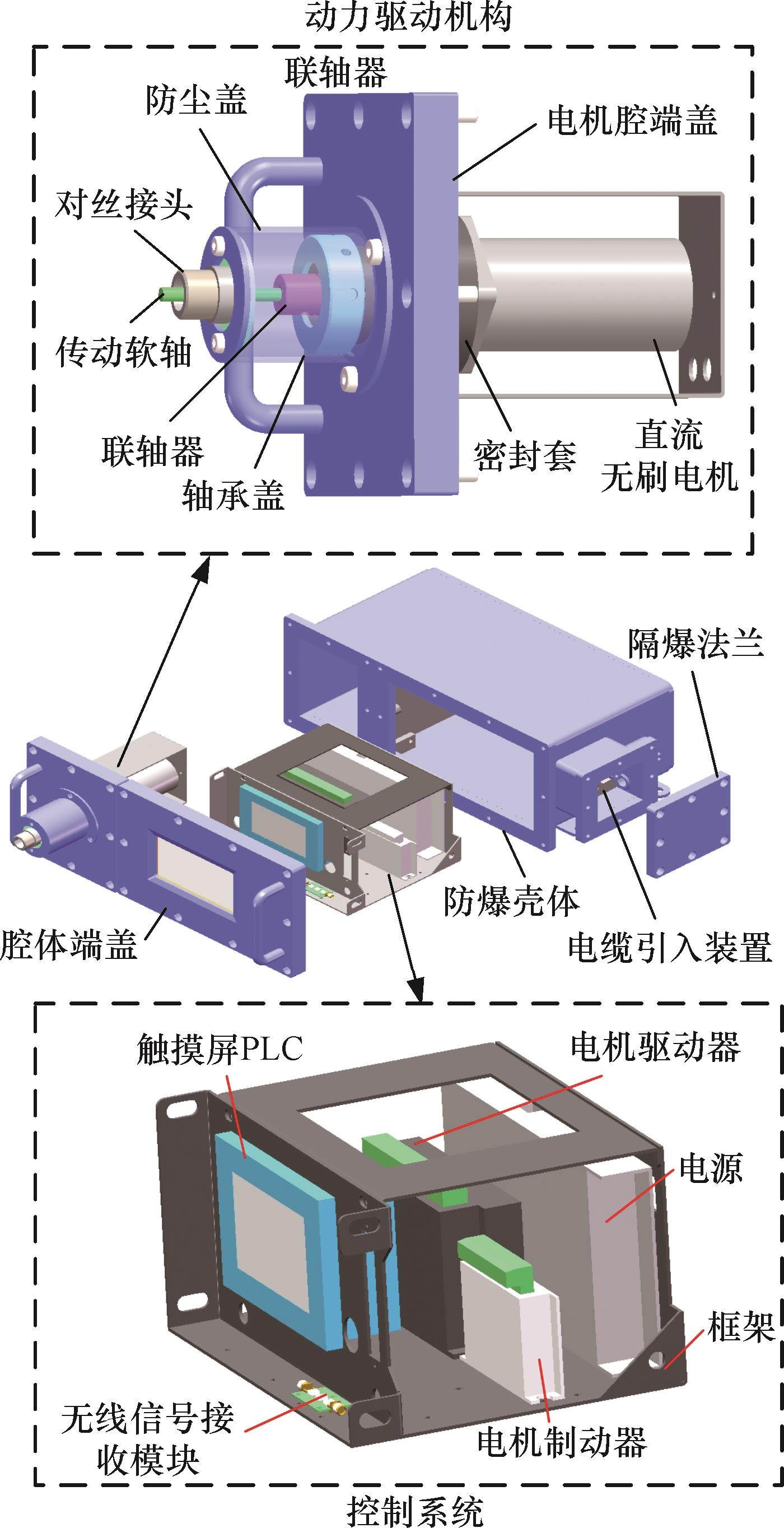
图5 动力驱动装置结构示意图
Fig.5 Schematic diagram of power drive device structure
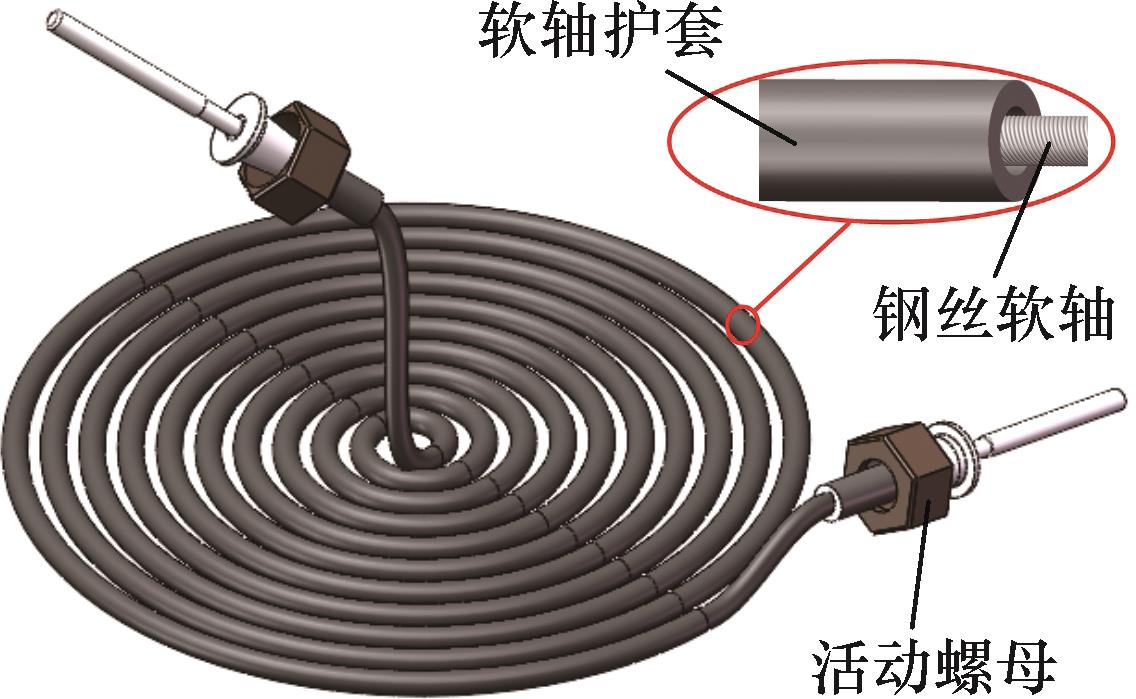
图6 软轴传动机构结构示意图
Fig.6 Schematic diagram of the structure of the flexible shaft transmission mechanism
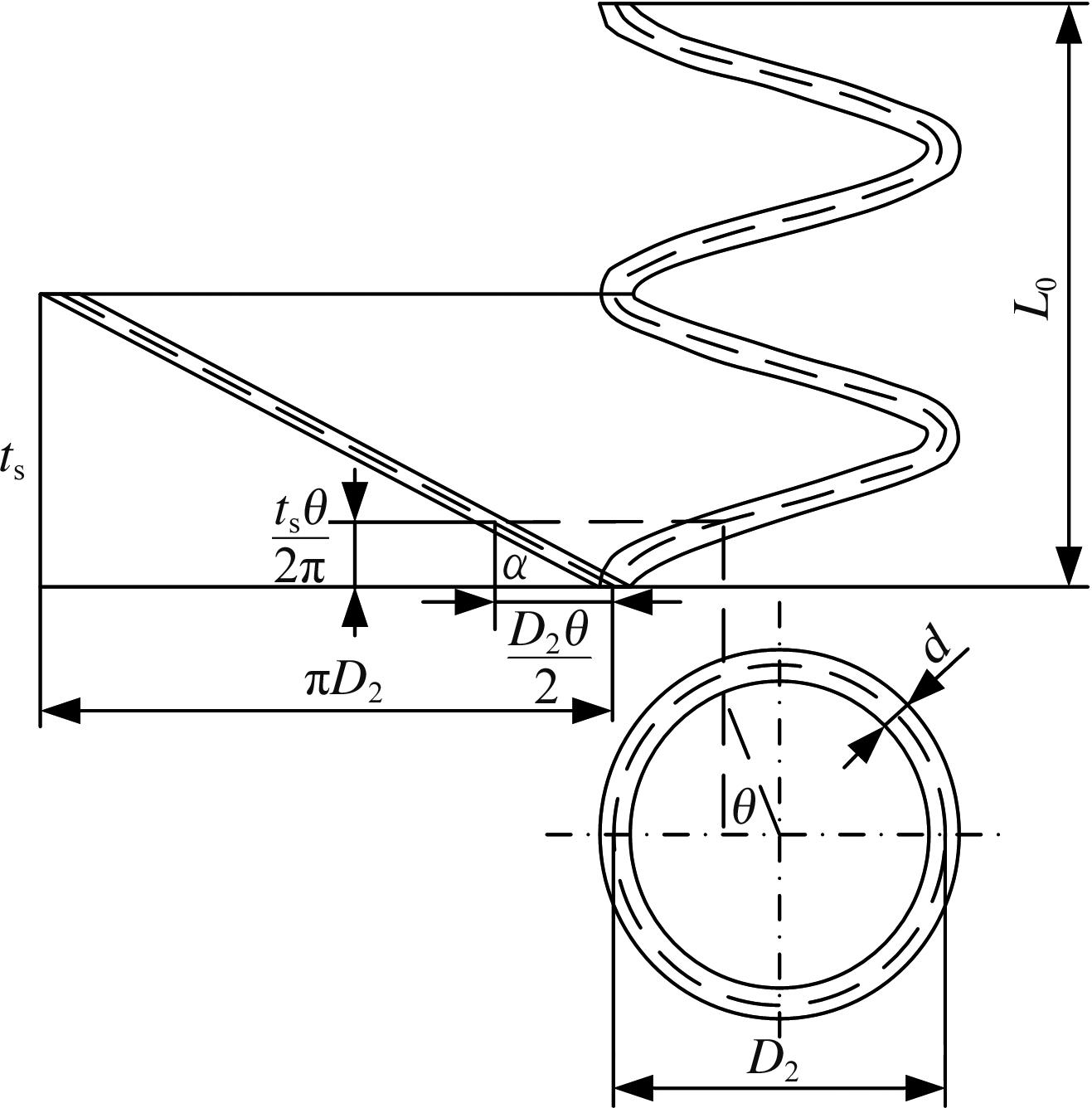
图7 单层传动软轴螺旋钢丝弹簧展开图
Fig.7 Unfolding diagram of single-layer transmission flexible shaft spiral spring
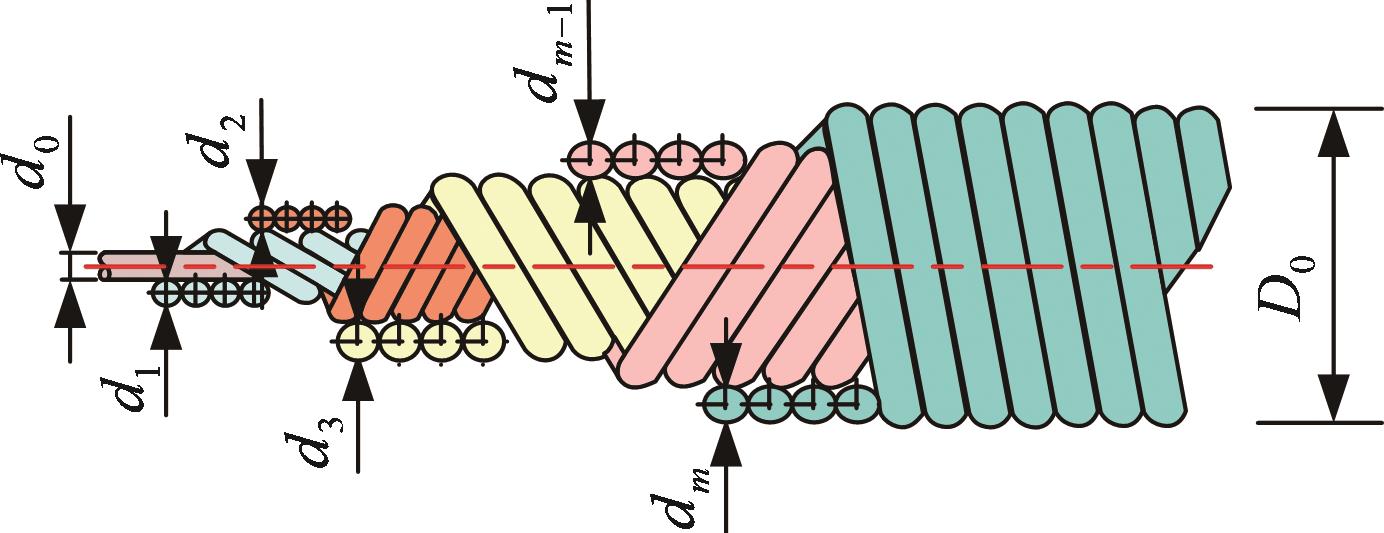
图8 多层传动软轴缠绕机构图
Fig.8 Multi layer transmission flexible shaft winding mechanism diagram
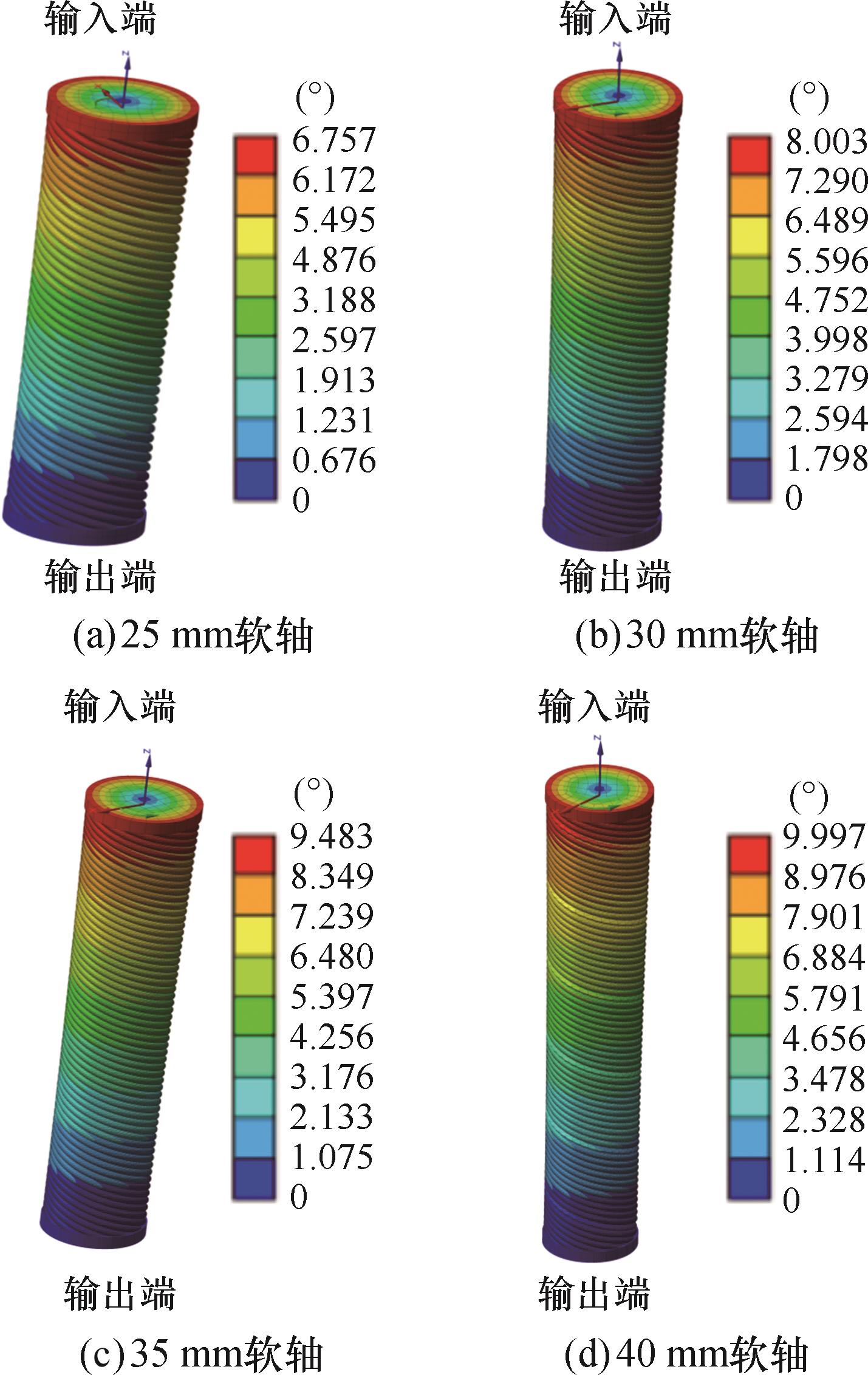
图9 不同长度软轴的等效位移云图
Fig.9 Equivalent displacement cloud chart of flexible shafts with different lengths
| 长度/mm | 扭矩/(N·m) | |||||
|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | |
| 25 | 0 | 2.253 | 4.222 | 6.757 | 9.009 | 11.575 |
| 30 | 2.702 | 5.015 | 8.003 | 10.794 | 13.516 | |
| 35 | 3.138 | 6.310 | 9.484 | 12.583 | 15.747 | |
| 40 | 3.619 | 7.021 | 9.997 | 14.327 | 17.823 | |
表3 不同长度软轴在不同转矩下最大扭转角度 (°)
Tab.3 Maximum torsion angle of flexible shafts of different lengths under different torques
| 长度/mm | 扭矩/(N·m) | |||||
|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | |
| 25 | 0 | 2.253 | 4.222 | 6.757 | 9.009 | 11.575 |
| 30 | 2.702 | 5.015 | 8.003 | 10.794 | 13.516 | |
| 35 | 3.138 | 6.310 | 9.484 | 12.583 | 15.747 | |
| 40 | 3.619 | 7.021 | 9.997 | 14.327 | 17.823 | |
| 软轴长度/mm | 25 | 30 | 35 | 40 |
|---|---|---|---|---|
| 软轴扭转刚度/((°)·N-1·m-1) | 2.252 | 2.699 | 3.146 | 3.639 |
表4 仿真数据拟合后不同长度钢丝软轴扭转刚度
Tab.4 Torsional stiffness of steel wire flexible shafts with different lengths after fitting simulation data
| 软轴长度/mm | 25 | 30 | 35 | 40 |
|---|---|---|---|---|
| 软轴扭转刚度/((°)·N-1·m-1) | 2.252 | 2.699 | 3.146 | 3.639 |
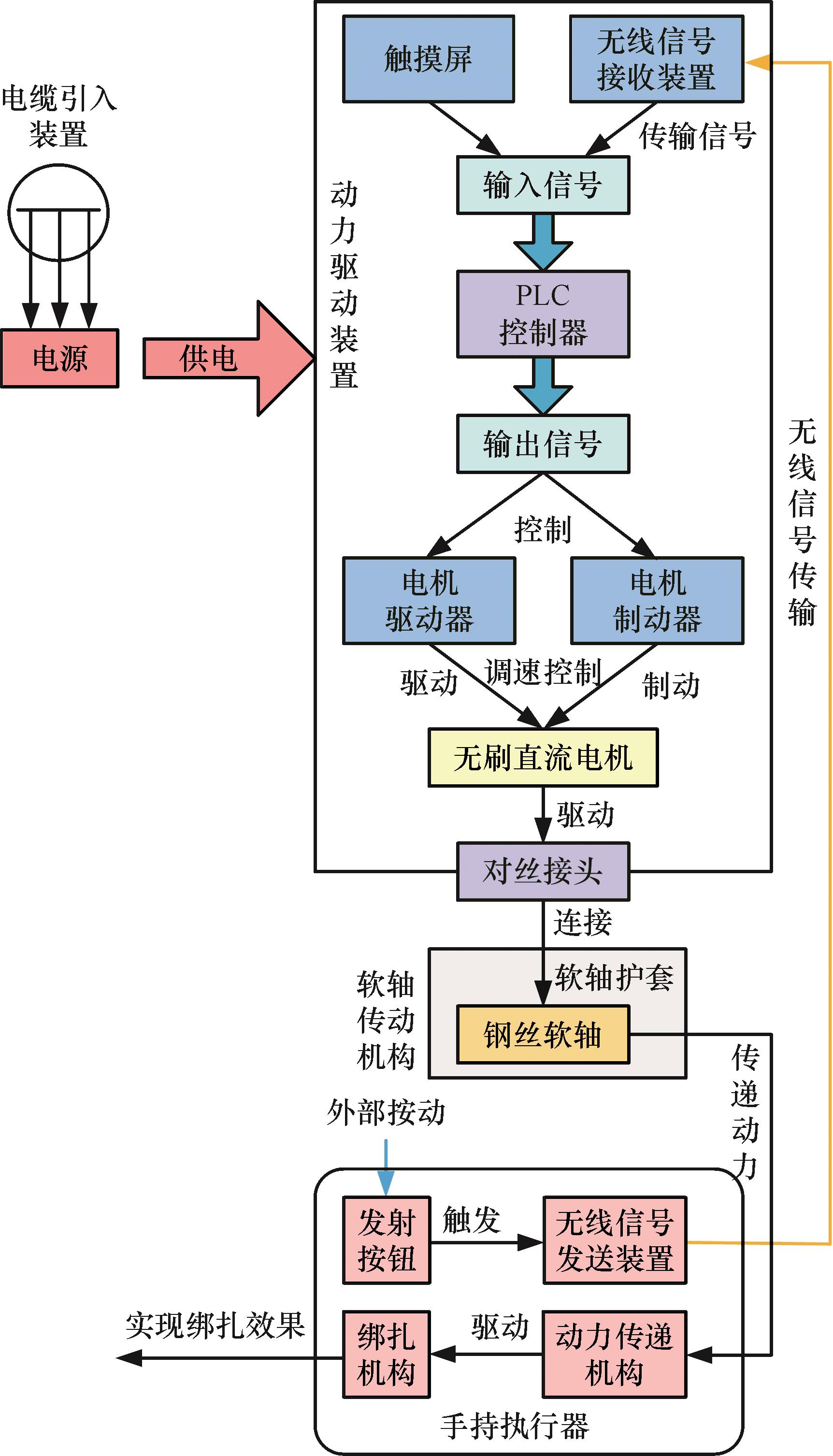
图10 动力驱动控制系统工作原理图
Fig.10 Working principle diagram of power drive control
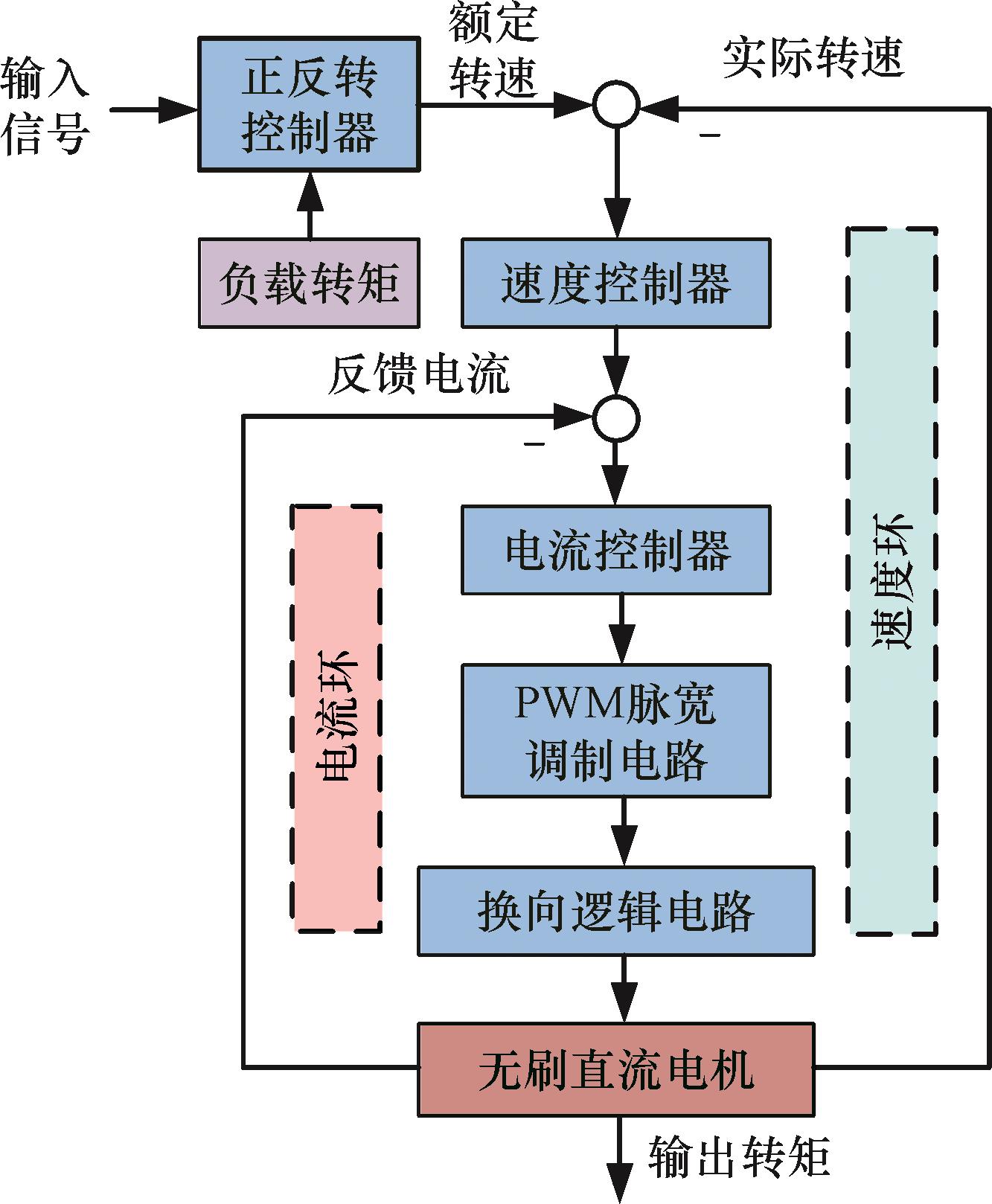
图11 无刷直流电机控制方案
Fig.11 Control scheme for brushless DC motor
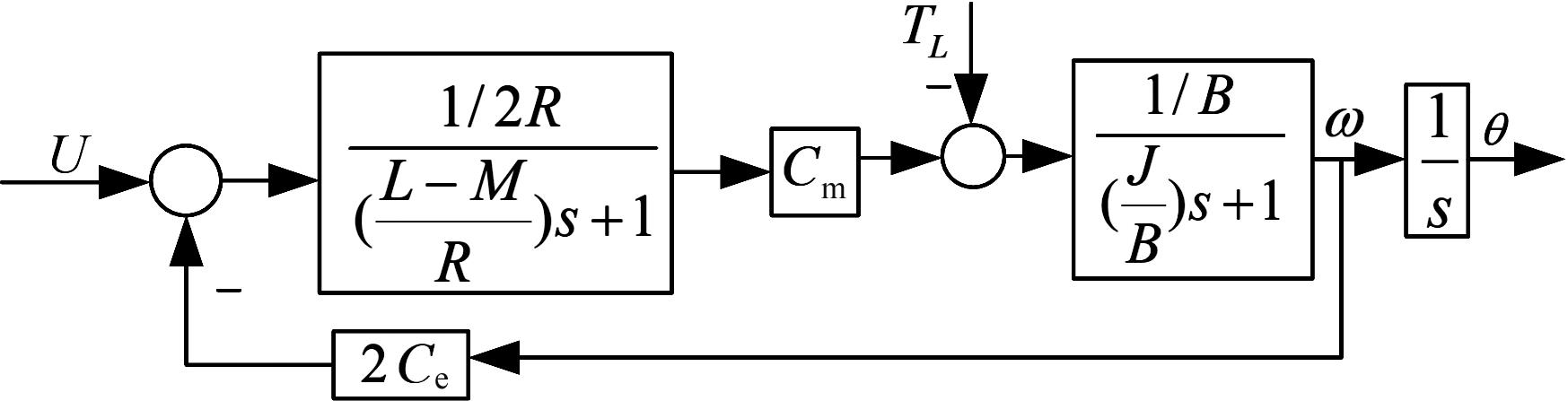
图12 无刷直流电机控制系统方块图
Fig.12 Block diagram of brushless DC motor control system
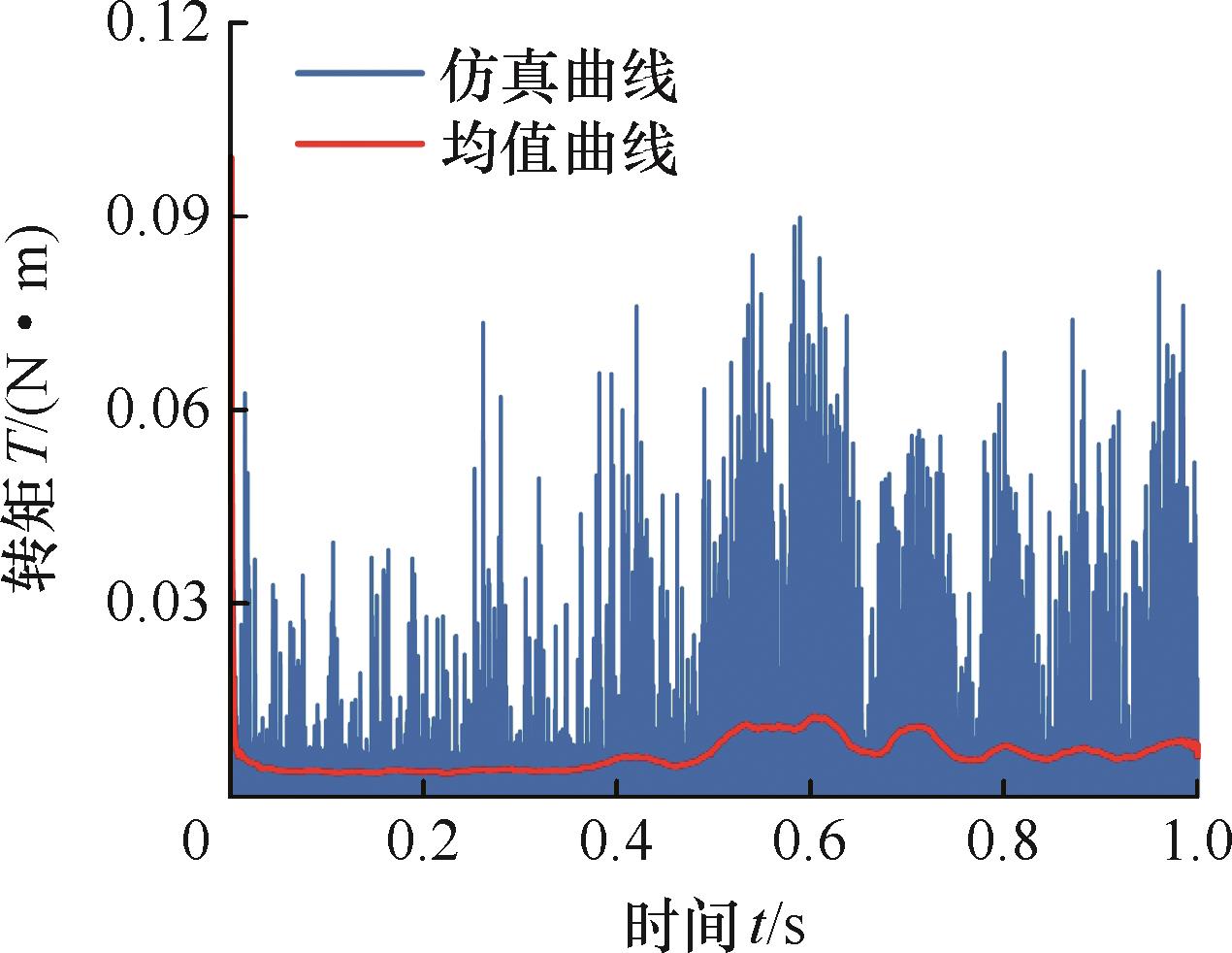
图13 送丝过程输入轴负载转矩曲线
Fig.13 Input shaft load torque curve during wire feeding
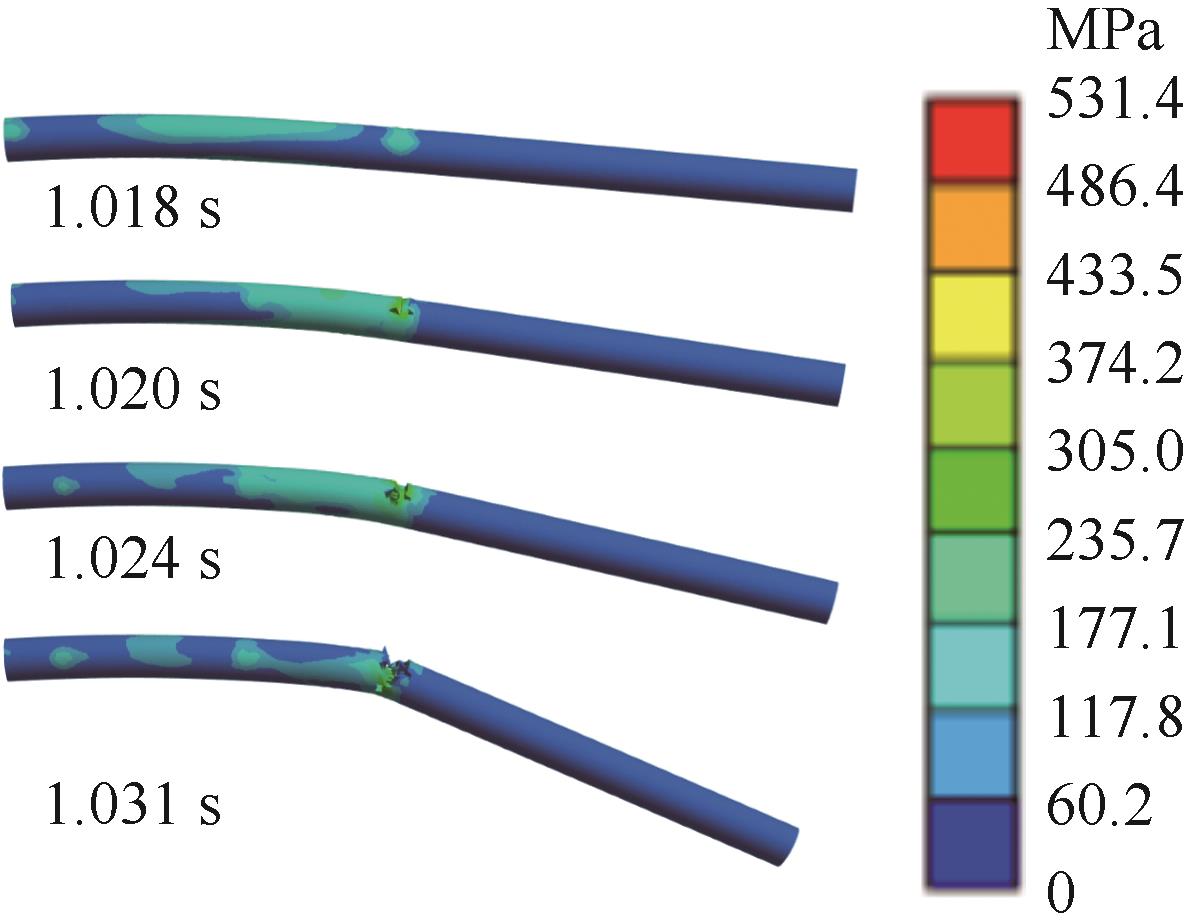
图14 绑扎丝切断过程应力云图
Fig.14 Stress contour of the cutting process of the lashing wire
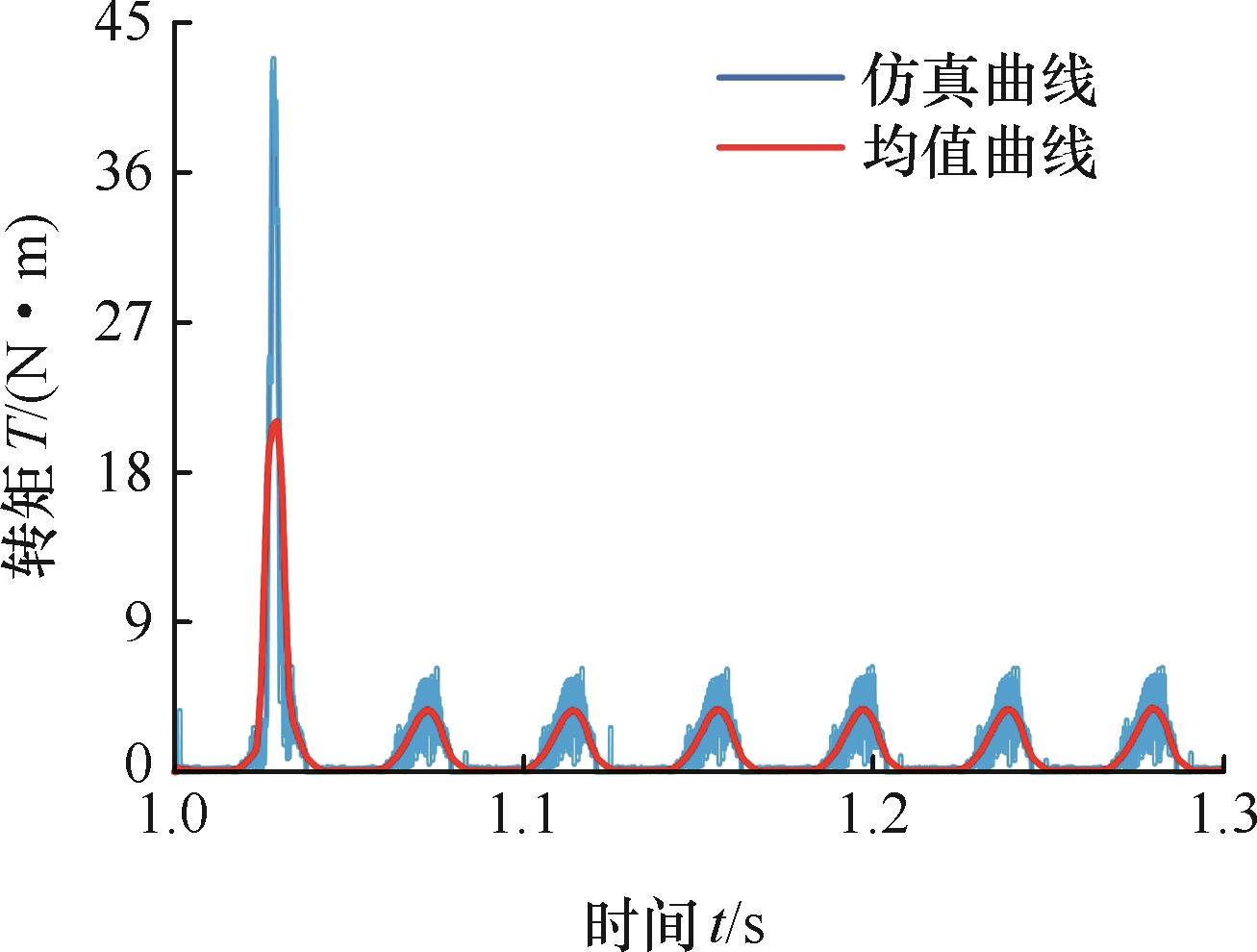
图15 切丝过程输入轴负载转矩曲线
Fig.15 Input shaft load torque curve in the shredding process
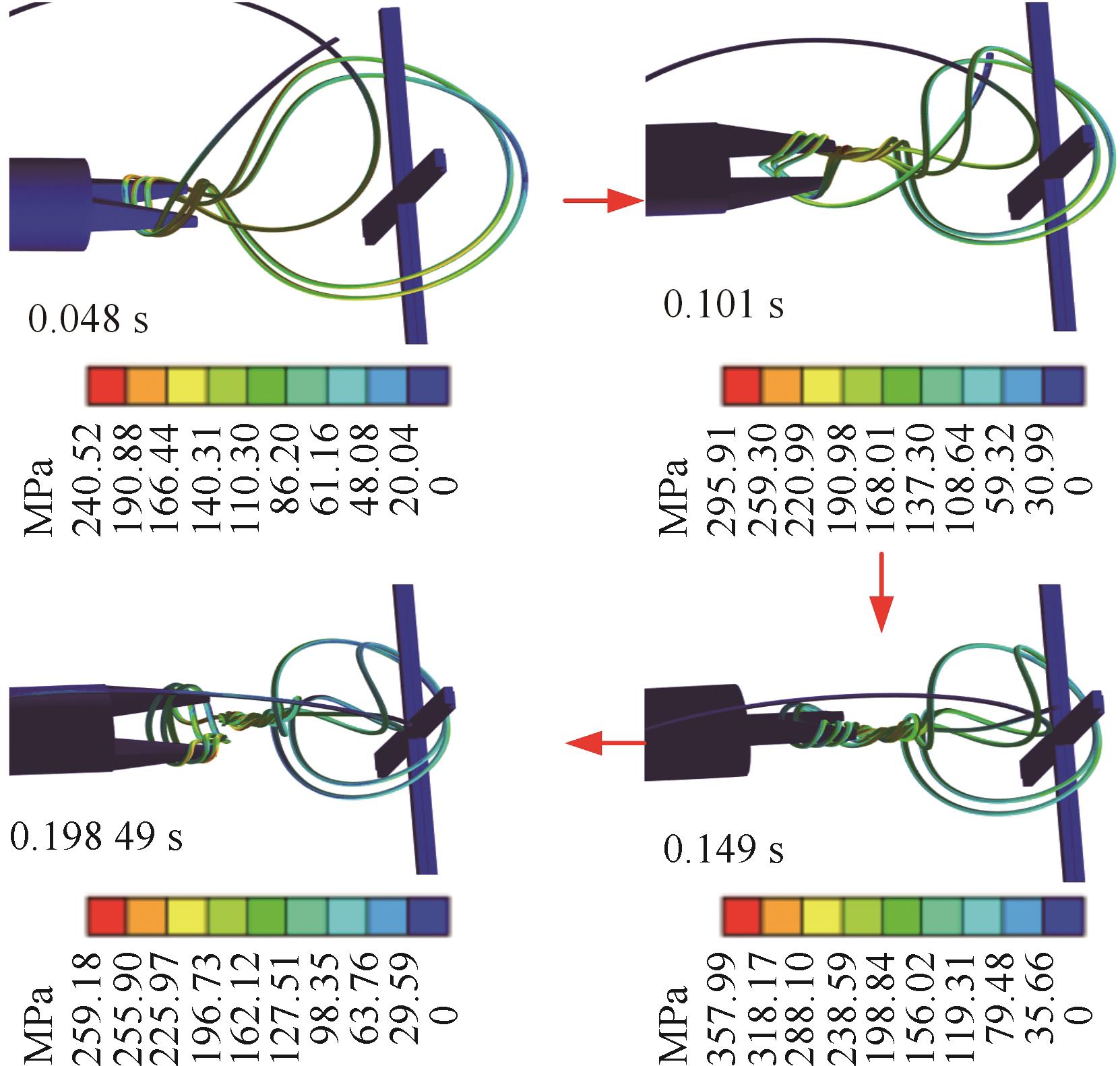
图16 绑扎丝旋拧过程应力云图
Fig.16 Stress contour diagram of the twisting process of the binding wire
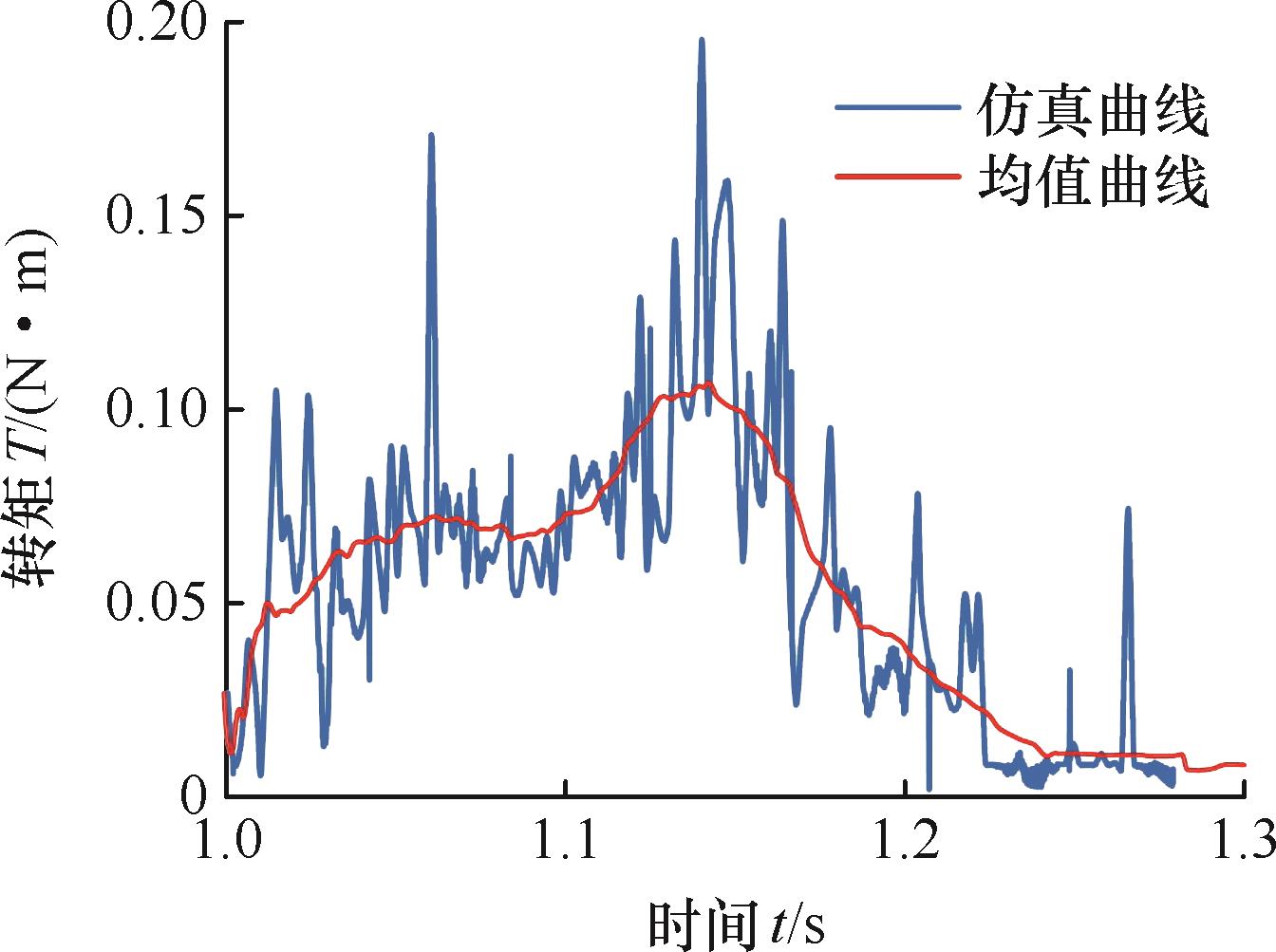
图17 拧丝过程输入轴负载转矩曲线
Fig.17 Torque curve of input shaft load during wire twisting
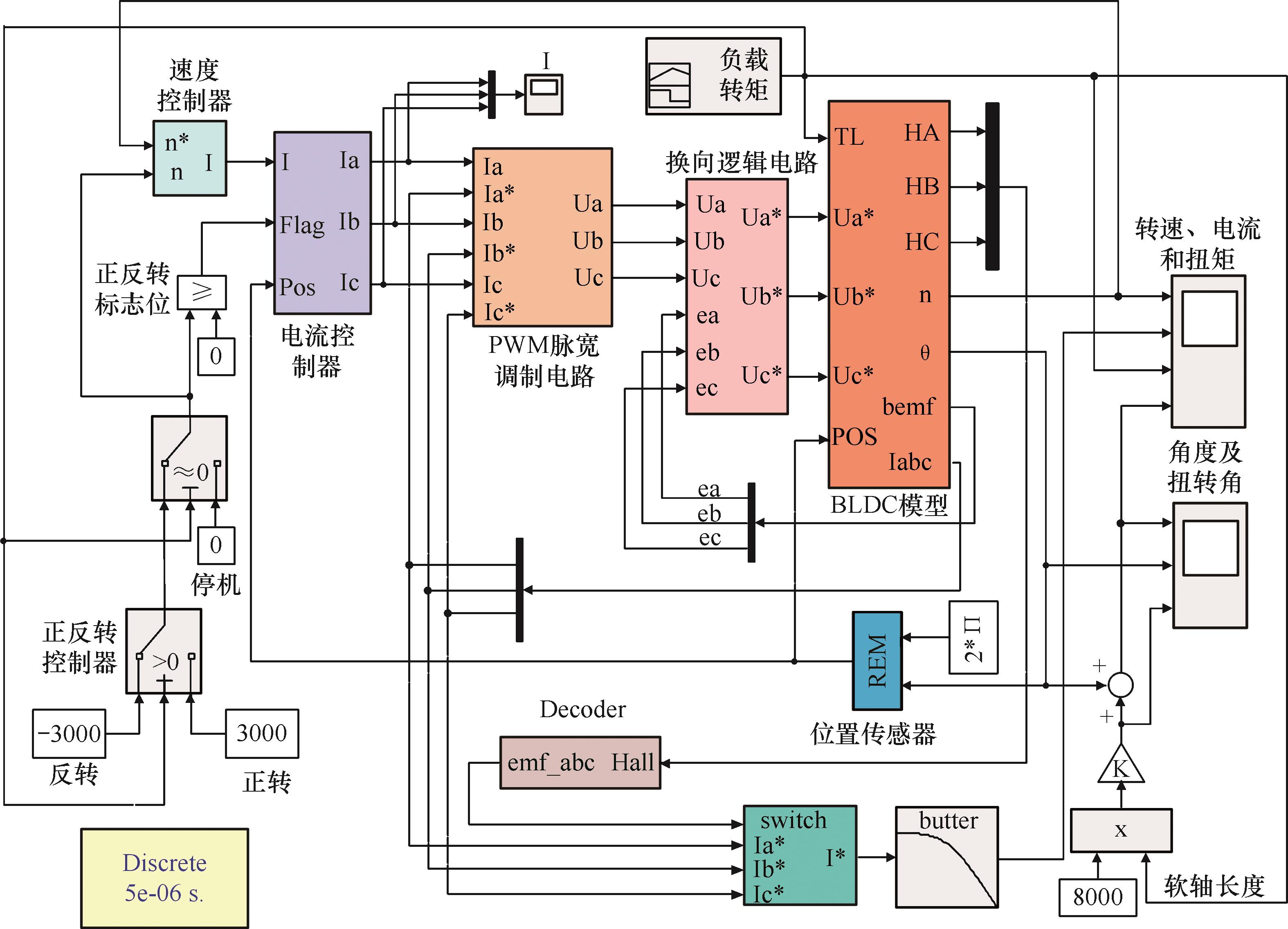
图18 无刷直流电机调速控制系统仿真模型
Fig.18 Simulation model of brushless DC motor speed control system
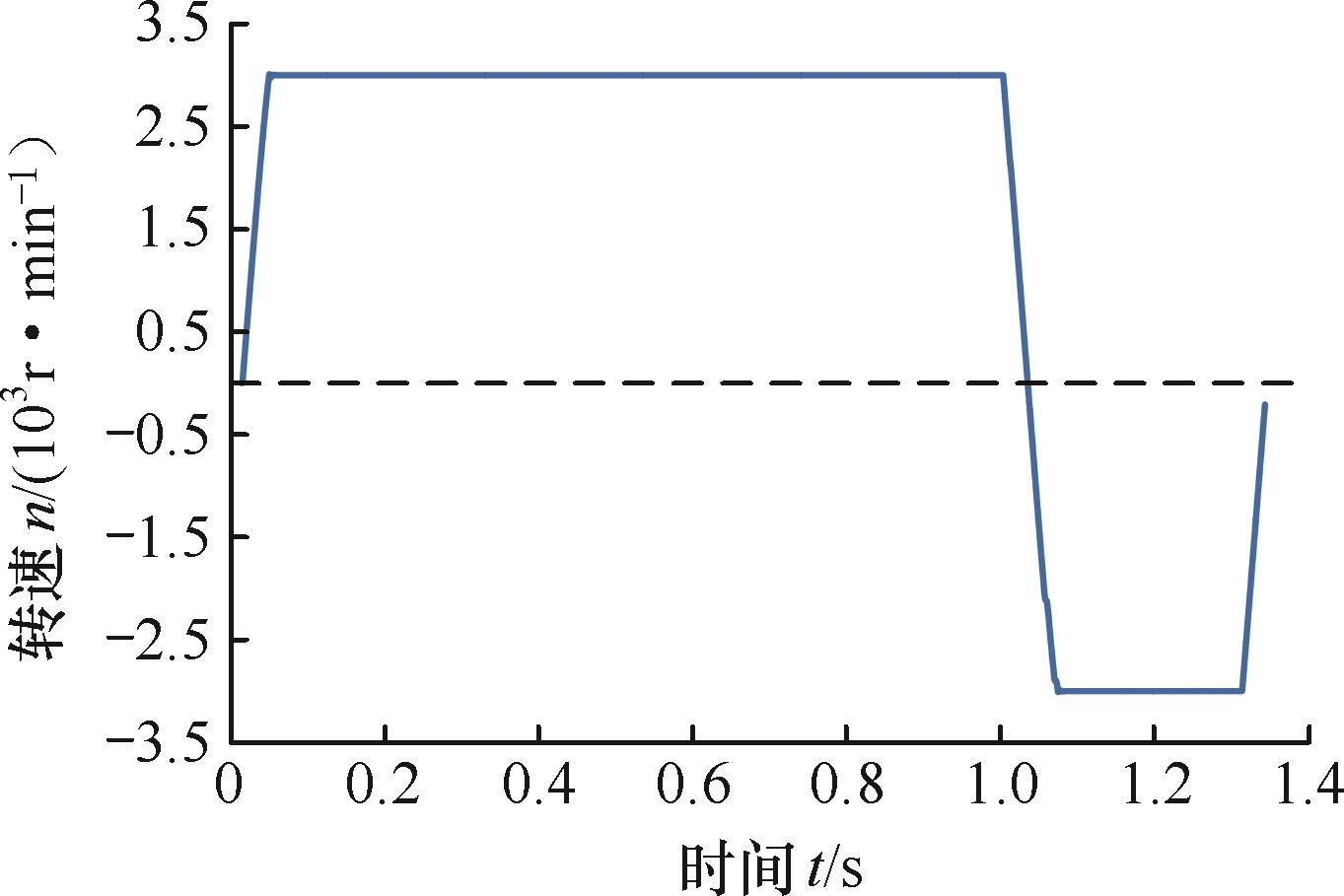
图19 电机输出转速
Fig.19 Motor output speed
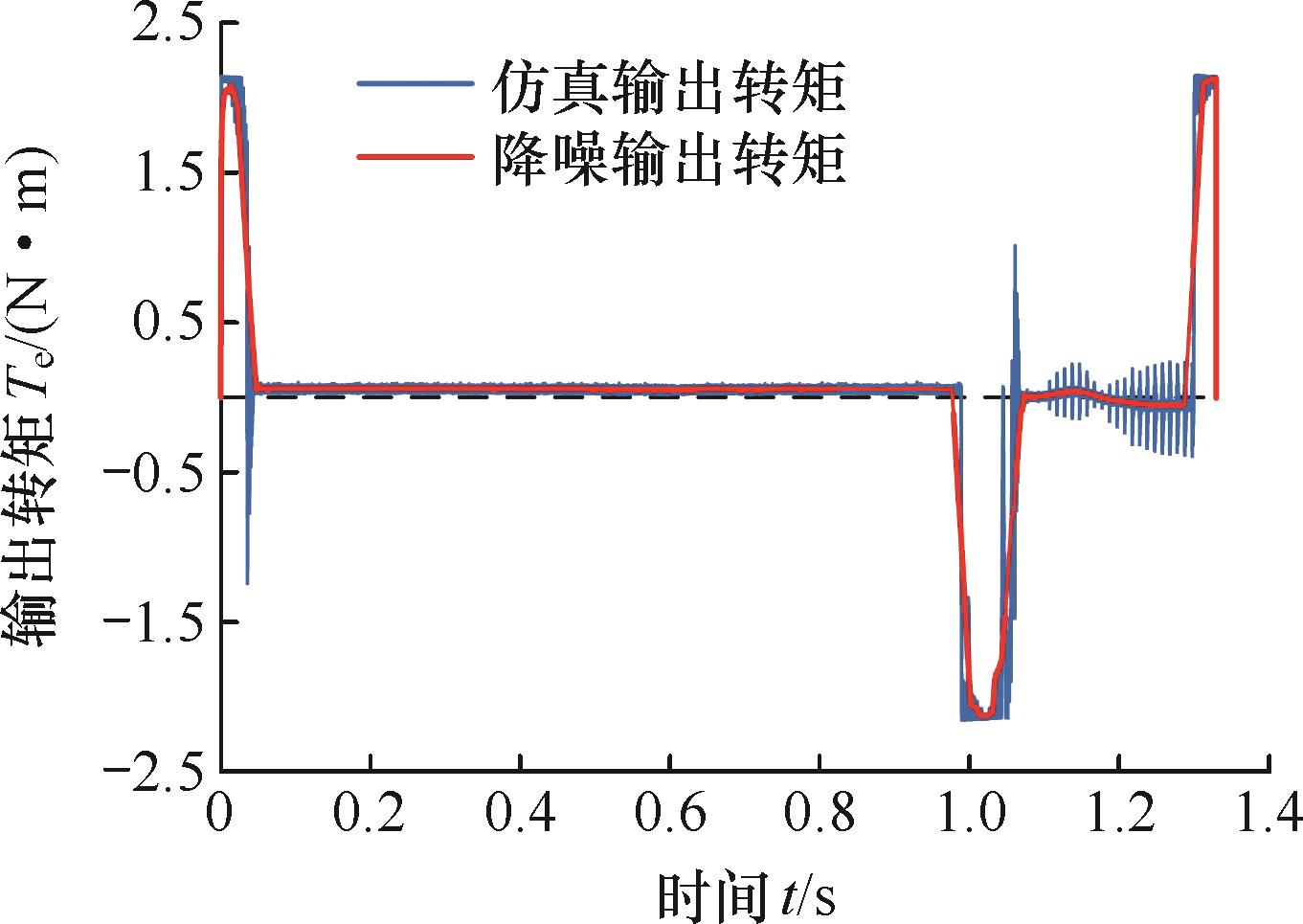
图20 电机输出力矩
Fig.20 Motor output torque
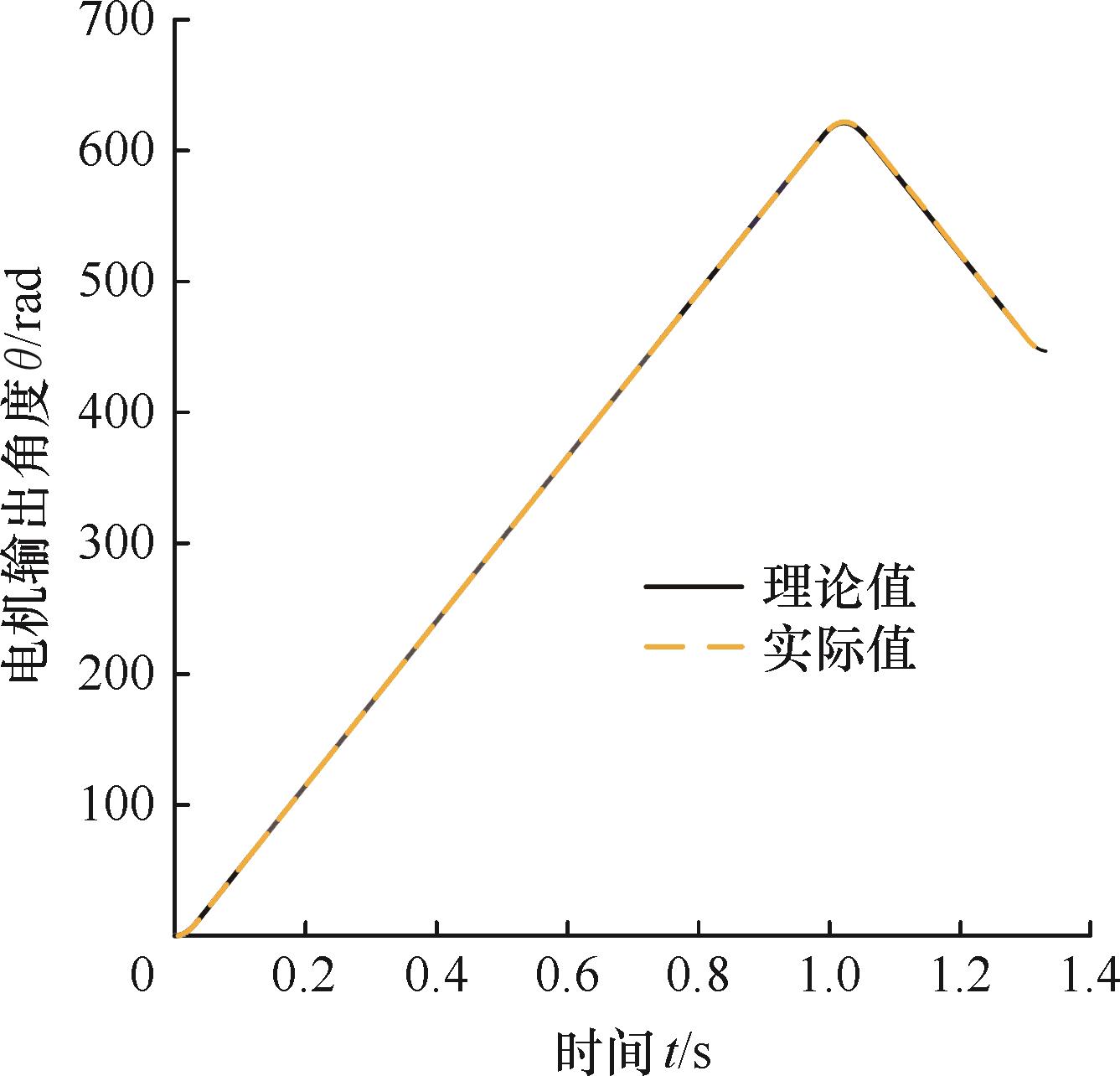
图21 输出角度对比曲线
Fig.21 Comparison curve of output angle
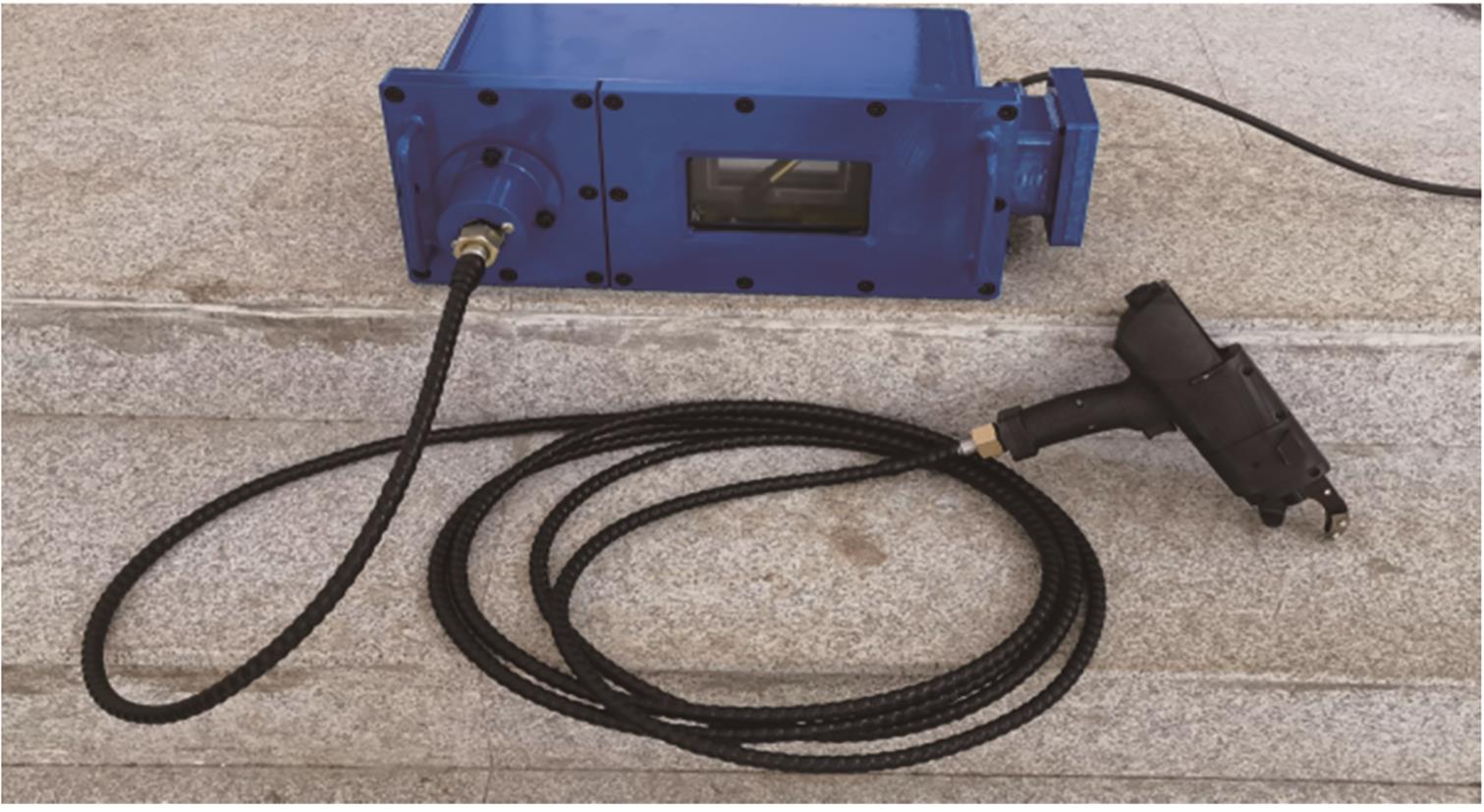
图22 锚网自动绑扎装置样机
Fig.22 Prototype of anchor net automatic binding device
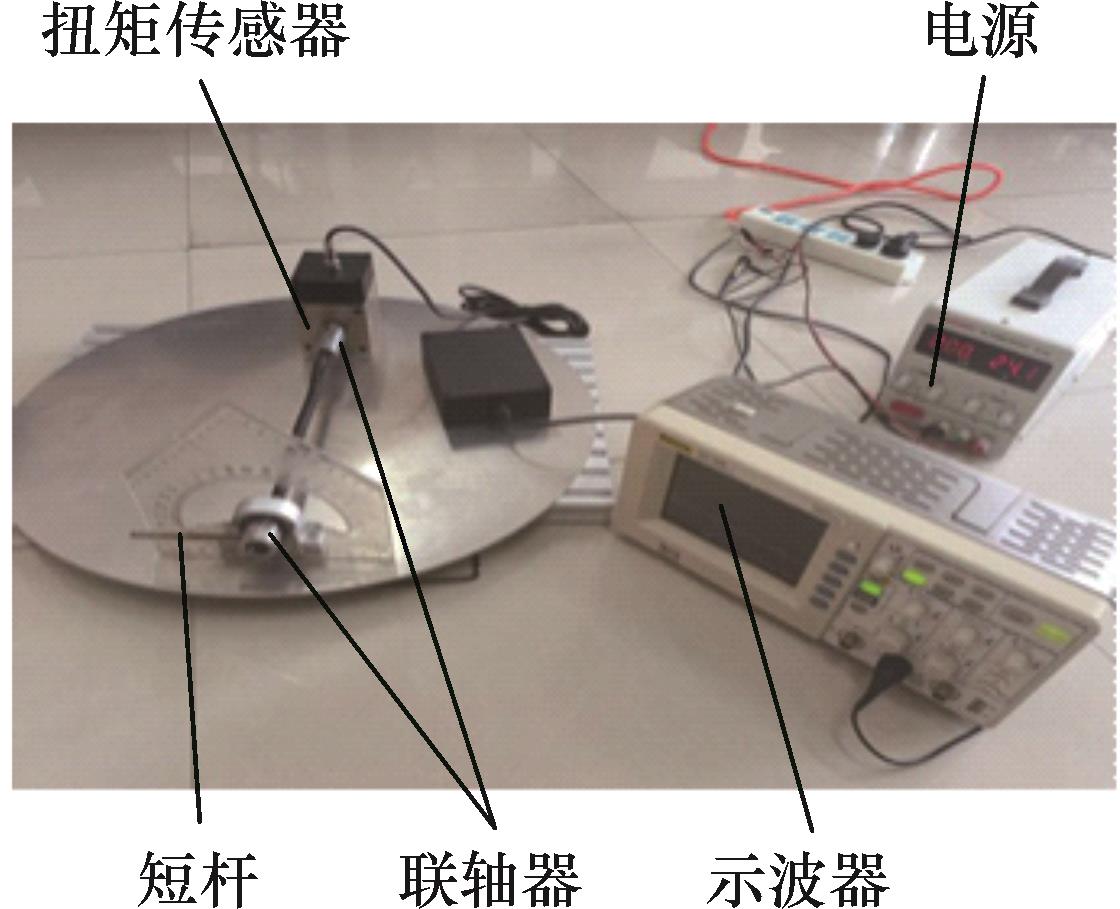
图23 传动软轴扭矩、扭转角测试平台
Fig.23 Transmission flexible shaft torque and torsion angle testing platform
| 长度/mm | 扭矩/(N·m) | ||||
|---|---|---|---|---|---|
| 0 | 0.05 | 0.10 | 0.15 | 0.20 | |
| 250 | 0 | 1.1 | 2.0 | 3.1 | 4.0 |
| 500 | 0 | 1.8 | 3.9 | 5.7 | 7.9 |
| 750 | 0 | 2.9 | 5.8 | 9.1 | 12.0 |
| 1000 | 0 | 4.2 | 7.8 | 11.9 | 16.0 |
表5 软轴扭转角与输出扭矩实验测试结果 (°)
Tab.5 Experimental test results of soft shaft torsion angle and output torque
| 长度/mm | 扭矩/(N·m) | ||||
|---|---|---|---|---|---|
| 0 | 0.05 | 0.10 | 0.15 | 0.20 | |
| 250 | 0 | 1.1 | 2.0 | 3.1 | 4.0 |
| 500 | 0 | 1.8 | 3.9 | 5.7 | 7.9 |
| 750 | 0 | 2.9 | 5.8 | 9.1 | 12.0 |
| 1000 | 0 | 4.2 | 7.8 | 11.9 | 16.0 |
| 软轴长度/mm | 250 | 500 | 750 | 1000 |
|---|---|---|---|---|
| 软轴扭转刚度/((°)·N-1·m-1) | 20.03 | 40.15 | 60.18 | 80.28 |
表6 实验数据拟合后不同长度钢丝软轴的扭转刚度
Tab.6 Torsional stiffness of flexible steel wire shafts with different lengths after experimental data fitting
| 软轴长度/mm | 250 | 500 | 750 | 1000 |
|---|---|---|---|---|
| 软轴扭转刚度/((°)·N-1·m-1) | 20.03 | 40.15 | 60.18 | 80.28 |
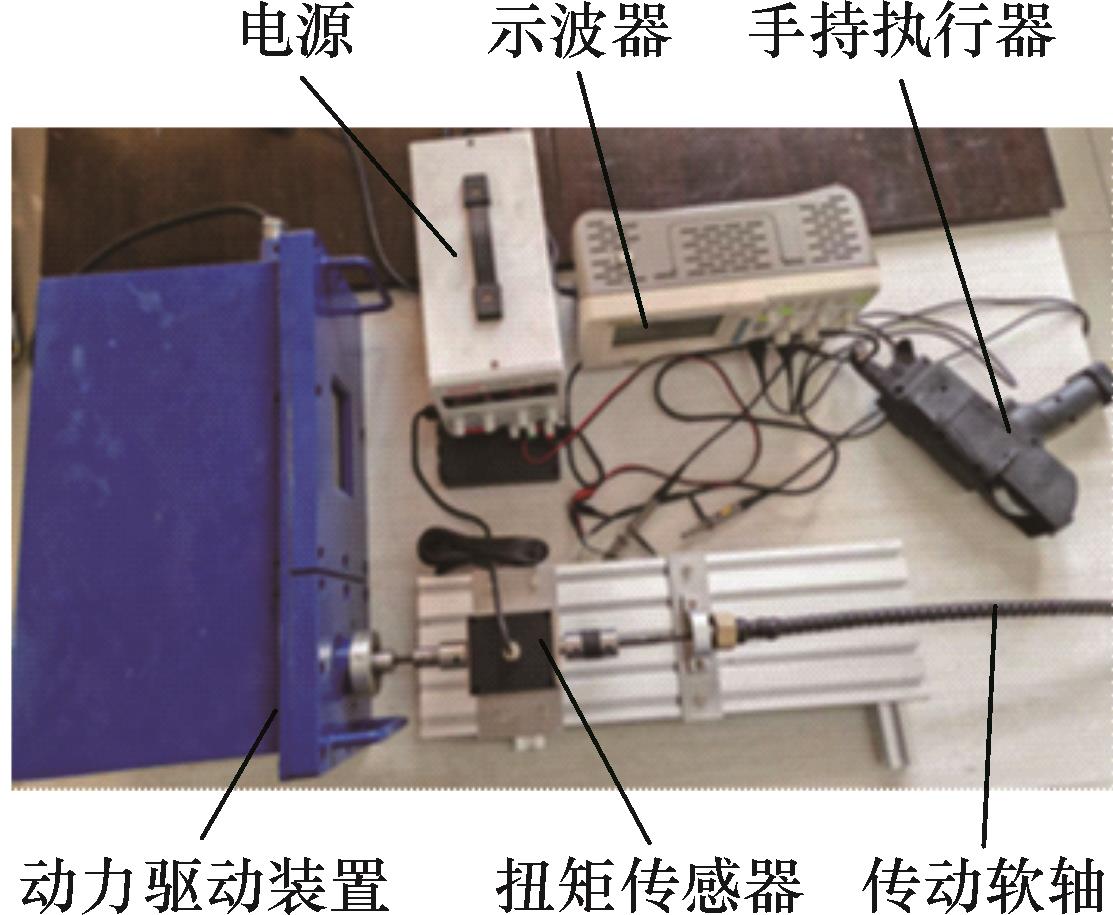
图24 锚网自动绑扎装置实验平台
Fig.24 Anchor net automatic binding device experimental platform
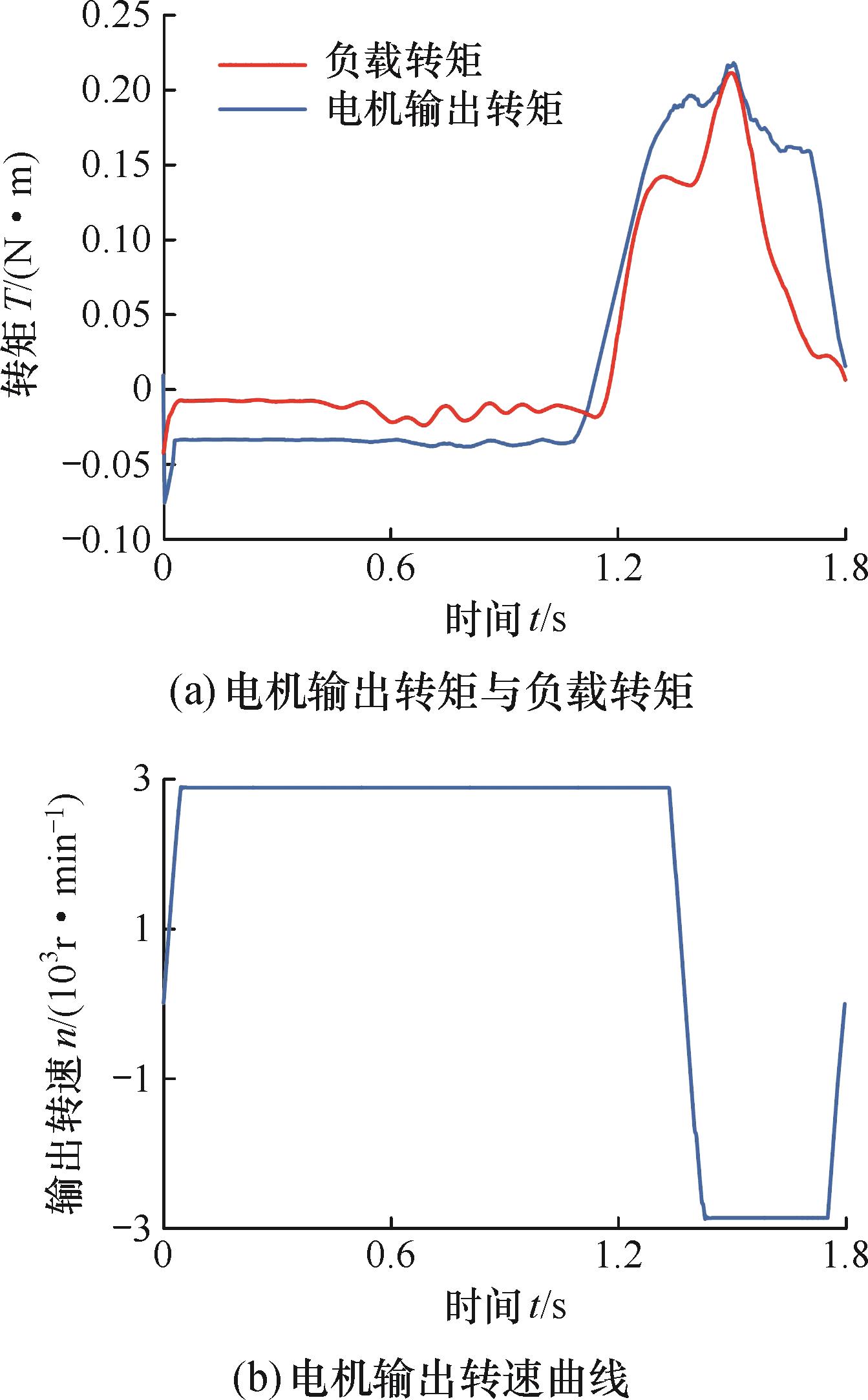
图25 绑扎实验过程电机扭矩、转速曲线
Fig.25 Torque\speed curve of the motor during the binding experiment process

图26 锚网绑扎实验测试效果图
Fig.26 Experimental test effect of anchor net binding
| 名称 | 绑扎效率 (每扣耗时)/s | 绑扎扣最大 可承受拉力/N |
|---|---|---|
| 人工钢筋绑扎钩 | 20~30 | 750 |
| 气动锚网连扣机 | 10~12 | 500 |
| 锚网自动绑扎装置 | 1.8~2 | 750 |
表7 锚网绑扎效率及绑扎质量参数
Tab. 7 Anchor net lashing efficiency and lashing quality parameters
| 名称 | 绑扎效率 (每扣耗时)/s | 绑扎扣最大 可承受拉力/N |
|---|---|---|
| 人工钢筋绑扎钩 | 20~30 | 750 |
| 气动锚网连扣机 | 10~12 | 500 |
| 锚网自动绑扎装置 | 1.8~2 | 750 |
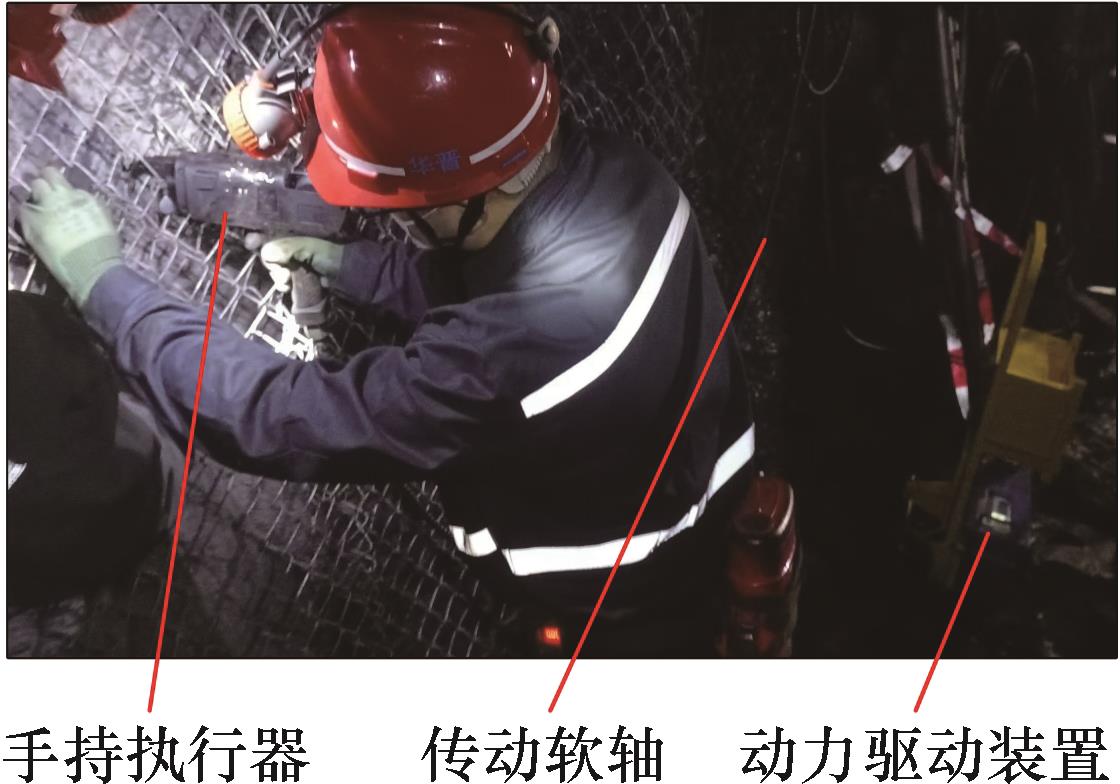
图27 井下锚网绑扎实验测试效果图
Fig.27 Underwater anchor network binding test results
| [1] | 孟庆彬, 辛学奎, 刘滨, 等. 深井沿空巷道锚网索支护安全评价系统研发及应用[J]. 采矿与安全工程学报, 2024, 41(5): 946-957. |
| MENG Qingbin, XIN Xuekui, LIU Bin, et al. Research and Application of Safety Evaluation System for Bolt-mesh-cable Support in the Deep Roadway along Goaf[J]. Journal of Mining & Safety Engineering, 2024, 41(5): 946-957. | |
| [2] | 谢正正, 张农, 韩昌良, 等. 煤巷顶板厚层跨界锚固原理与应用研究[J]. 岩石力学与工程学报, 2021, 40(6): 1195-1208. |
| XIE Zhengzheng, ZHANG Nong, HAN Changliang, et al. Research on Principle and Application of Roof Thick Layer Cross-boundary Anchorage in Coal Roadways[J]. Chinese Journal of Rock Mechanics and Engineering, 2021, 40(6): 1195-1208. | |
| [3] | 胡成军, 李杰, 张坤, 等. 基于掘锚一体机的快速自动铺网技术研究[J]. 煤炭科学技术, 2024, 52(9): 103-111. |
| HU Chengjun, LI Jie, ZHANG Kun, et al. Research on Fast Automatic Net-laying Technology Based on the Auxiliary Drilling and Anchoring Integrated Machine[J]. Coal Science and Technology, 2024, 52(9): 103-111. | |
| [4] | 王进, 童占荣. “U-TIER” 全自动钢筋捆扎机[J]. 建筑机械, 2004(2): 43-44. |
| WANG Jin, TONG Zhanrong. Automatic Rebar Tying Machine“U-TIER”[J]. Construction Machinery, 2004(2): 43-44. | |
| [5] | 霍媛媛, 陈忠, 于富勇. 矿用气动锚网连扣机: CN212884747U[P]. 2021-04-06. |
| Huo Yuanyuan, Chen Zhong, Yu Fuyong. Mining Pneumatic Anchor Net Connecting and Buckling Machine: CN212884747U[P]. 2021-04-06. | |
| [6] | 王连超. 气动锚网连扣机在煤矿快速掘进中的应用[J]. 中国高新科技, 2020(18): 66-67. |
| WANG Lianchao. Application of Pneumatic Anchor Net Coupling Machine in Coal Mine Rapid Driving[J]. China High and New Technology, 2020(18): 66-67. | |
| [7] | 储凯煜, 江波. 一种双圈成型的气动锚网连扣机: CN209892256U[P]. 2020-01-03. |
| Chu Kaiyu, Jiang Bo. Double-ring Forming Pneumatic Anchor Net Connecting and Buckling Machine: CN209892256U[P]. 2020-01-03. | |
| [8] | 李晨, 汶浩, 万健, 等. 生产线用钢筋自动绑扎装置关键技术研究[J]. 建筑机械化, 2023, 44(6): 89-91. |
| LI Chen, WEN Hao, WAN Jian, et al. Research on the Key Technology of Automatic Reinforcement Binding Device for Production Line[J]. Construction Mechanization, 2023, 44(6): 89-91. | |
| [9] | 利秀芳. 全自动绑扎机: CN218570043U[P]. 2023-03-03. |
| Li Xiufang. Full-automatic Binding Machine: CN218570043U[P]. 2023-03-03. | |
| [10] | 崔玉莲, 吴纬. 基于TRIZ冲突解决原理的产品设计解耦[J]. 机械设计与研究, 2010, 26(6): 19-22. |
| CUI Yulian, WU Wei. Application of TRIZ Contradiction Solving Principles in Decoupling of Product Design[J]. Machine Design & Research, 2010, 26(6): 19-22. | |
| [11] | 张伟.基于ANSYS Workbench的钢丝软轴的受力仿真与研究[D].太原:山西农业大学,2015. |
| ZHANG Wei. Based on ANSYS Workb Simulation and Research on the Stress of Steel Wire Flexible Shaft [D]. Taiyuan: Shanxi Agricultural University, 2015. | |
| [12] | 田立勇, 隋然, 宋振铎, 等. 基于有限元法的固体充填液压支架底座结构参数优化[J]. 机械设计, 2018, 35(2): 98-104. |
| TIAN Liyong, SUI Ran, SONG Zhenduo, et al. Structure Optimization for Foundation of Solid Filling Hydraulic Support Based on Finite Element Method[J]. Journal of Machine Design, 2018, 35(2): 98-104. |
| [1] | 董佳祥, 刘铨权, 胡希平, 赵学智. 新型刚柔混联连续体机器人运动建模[J]. 中国机械工程, 2025, 36(11): 2678-2684. |
| [2] | 许辰辉1, 2, 张建辉1, 2, 郭向东1, 2, 丁照琪1, 2, 张顺1, 2. 融合发明问题解决理论与可拓学的多冲突网简化与求解策略[J]. 中国机械工程, 2024, 35(10): 1802-1814. |
| [3] | 陈亮;窦昊;魏煌;刘晓敏;陈博文. 基于质量功能展开、发明问题解决理论和仿生学的产品创新设计[J]. 中国机械工程, 2020, 31(11): 1285-1295. |
| [4] | 宫金良1;滕学芳2;张彦斐3. 一种基于理想度与粗糙数多属性决策的复杂非线性系统设计方法[J]. 中国机械工程, 2020, 31(04): 465-471,481. |
| [5] | 平恩顺, 檀润华, 孙建广. 基于TRIZ的机械产品突破性创新设想产生过程研究[J]. 中国机械工程, 2014, 25(18): 2439-2446. |
| [6] | 韦子辉, 檀润华. 产品设计中多冲突问题解决过程研究 [J]. 中国机械工程, 2010, 21(03): 263-267. |
| [7] | 杨伯军;田玉梅;檀润华;马建红;. 基于标准解的计算机辅助创新软件系统研究与开发[J]. J4, 2009, 20(06): 0-673. |
| [8] | 檀润华;杨伯军;张建辉;. 基于TRIZ的产品创新模糊前端设想产生模式研究[J]. J4, 2008, 19(16): 0-2015. |
| [9] | 姜亮;孙铁兵;屈福政;. 基于本体的技术创新研究[J]. J4, 2008, 19(15): 0-1889. |
| [10] | 刘晓敏;檀润华. 约束理论中当前实现树与冲突解决图表驱动创新设计研究[J]. J4, 2008, 19(12): 0-1511. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||