


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (10): 2463-2471.DOI: 10.3969/j.issn.1004-132X.2025.10.036
孔慧芳( ), 王晨顺, 张倩(), 刘田阔
), 王晨顺, 张倩(), 刘田阔
收稿日期:2024-08-30
出版日期:2025-10-25
发布日期:2025-11-05
通讯作者:
张倩
作者简介:孔慧芳,女,1964年生,教授、博士研究生导师。研究方向为控制理论与控制工程、新能源汽车运动规划等。E-mail:1989800024@hfut.edu.cn基金资助:
Huifang KONG(), Chenshun WANG, Qian ZHANG(), Tiankuo LIU
Received:2024-08-30
Online:2025-10-25
Published:2025-11-05
Contact:
Qian ZHANG
摘要:
为描述及规避智能车辆行驶时面临的不同维度风险,提出了一种基于时空风险场的双层轨迹规划方法。将交通要素划分为抽象要素和具象要素,分别建立基于高斯分布函数的抽象要素时空风险场和基于空间向量的具象要素时空风险场,以表征智能车辆在纵向、横向和时间三个维度面临的环境风险。将智能车辆的轨迹规划问题划分为路径和速度双层规划问题,分别考虑纵向-横向维度和纵向-时间维度的风险构建动态规划的代价函数,获取综合代价最低的路径和速度。结合二次规划算法对路径和速度进一步优化得到最终轨迹。仿真结果表明,所提出的方法在不同的驾驶场景下能够有效表征时空风险并规划出满足各项约束条件的行驶轨迹,从而提高道路驾驶的安全性。
中图分类号:
孔慧芳, 王晨顺, 张倩, 刘田阔. 基于时空风险场的智能车辆轨迹规划[J]. 中国机械工程, 2025, 36(10): 2463-2471.
Huifang KONG, Chenshun WANG, Qian ZHANG, Tiankuo LIU. Intelligent Vehicle Trajectory Planning Based on Spatio-temporal Risk Fields[J]. China Mechanical Engineering, 2025, 36(10): 2463-2471.
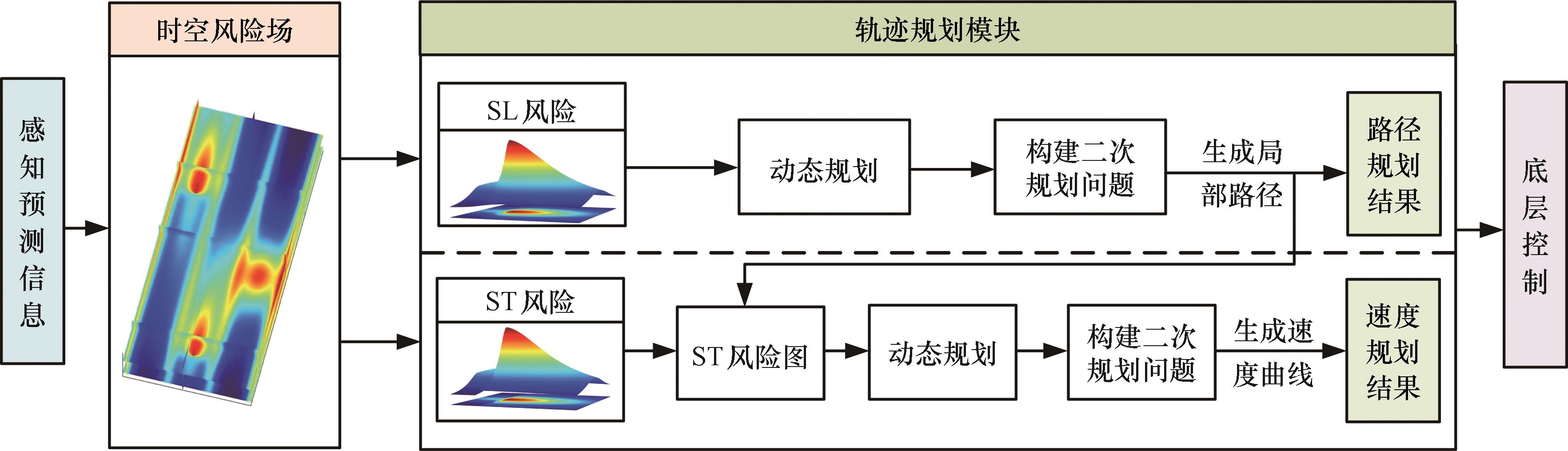
图1 基于时空风险场的轨迹规划架构
Fig.1 Trajectory planning architecture based on spatio-temporal risk field
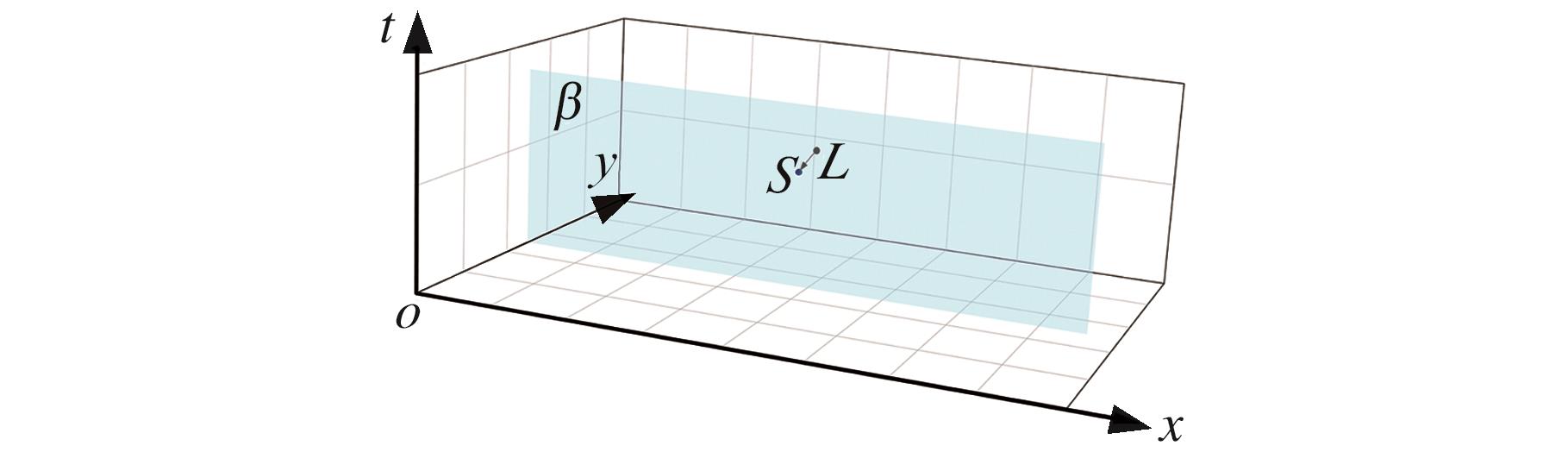
图2 抽象要素时空风险场建模示意方法
Fig.2 Schematic method of spatio-temporal risk field modeling of abstract elements
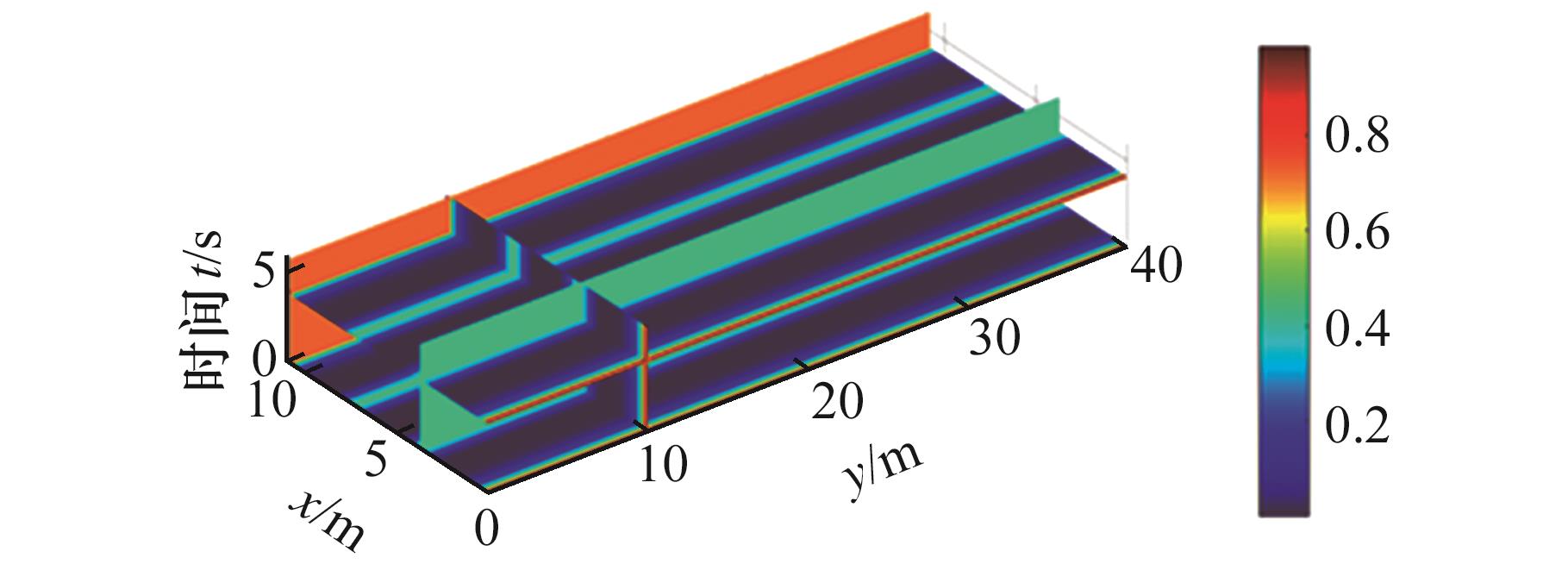
图3 抽象要素时空风险场
Fig.3 Spatio-temporal risk field of abstract elements
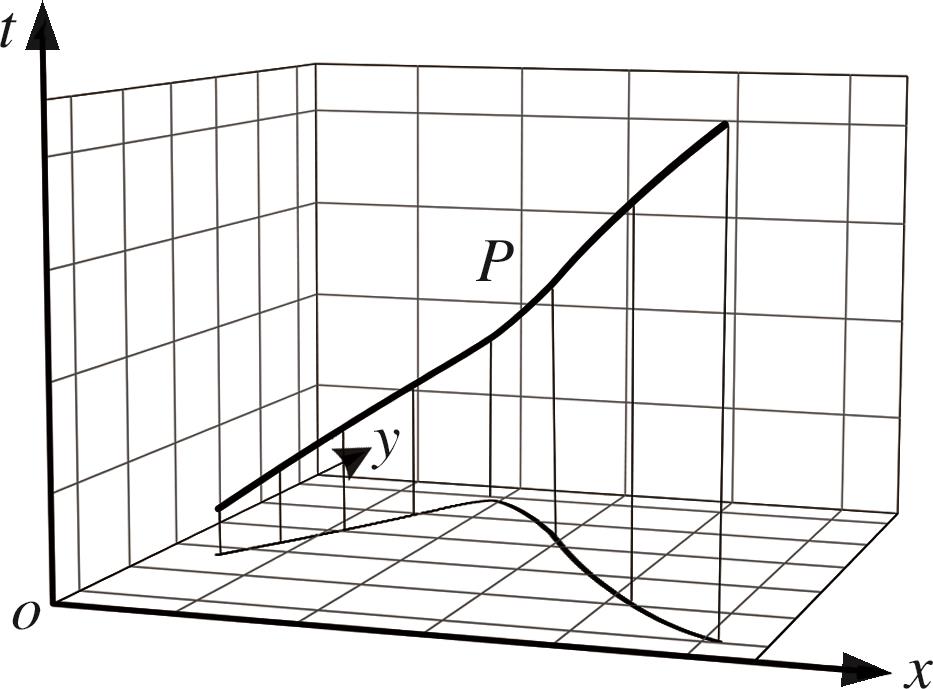
图4 绘制时空轨迹
Fig.4 Plots spatio-temporal trajectories
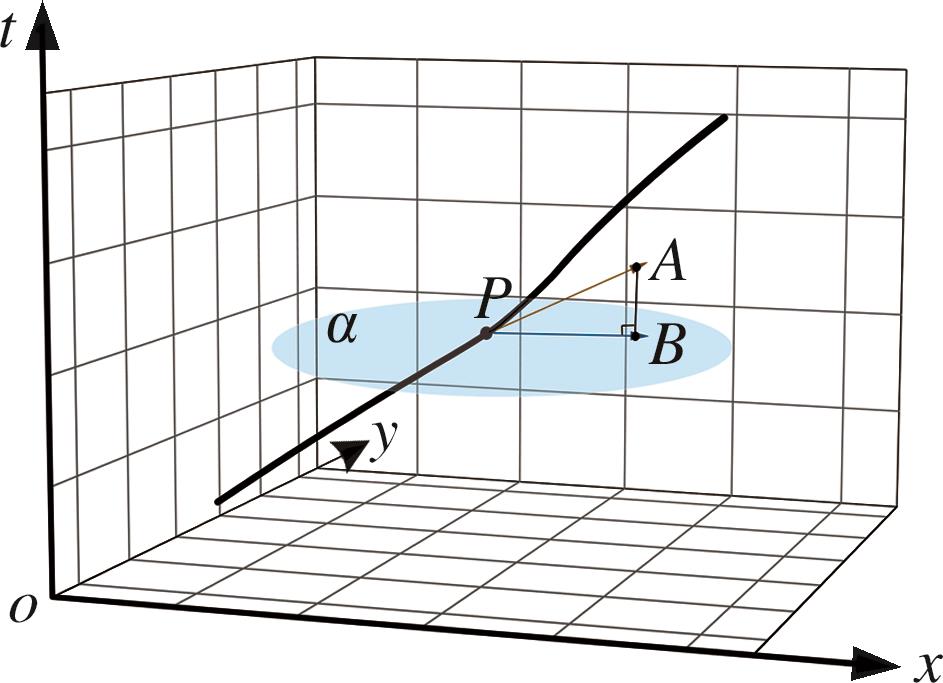
图5 时空轨迹切向量与投影绘制
Fig. 5 Tangent vector and projection rendering of spatio-temporal trajectory
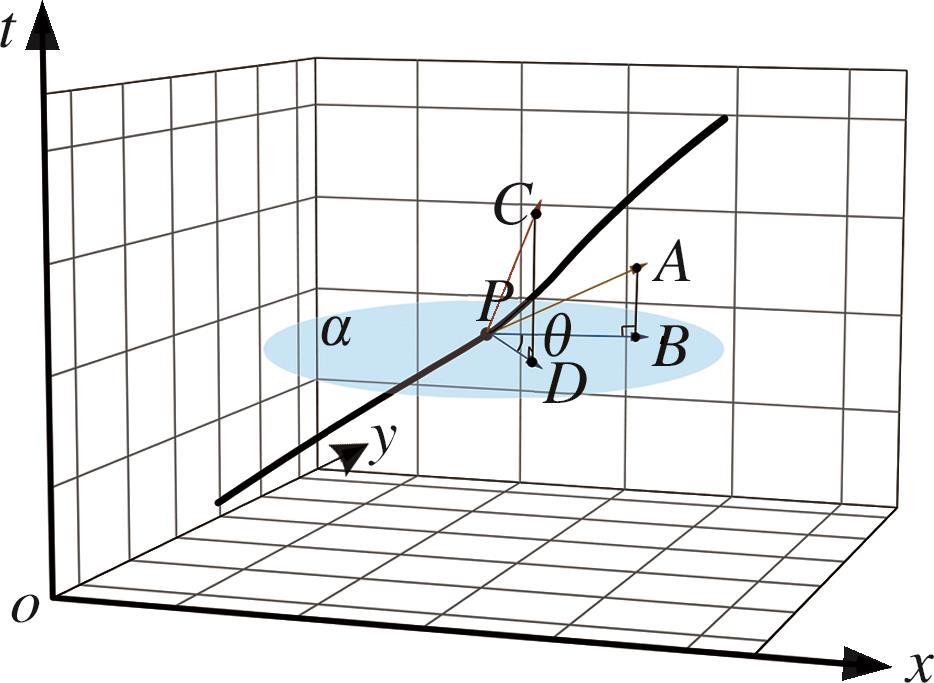
图6 θ角的获取
Fig.6 θ angle acquisition
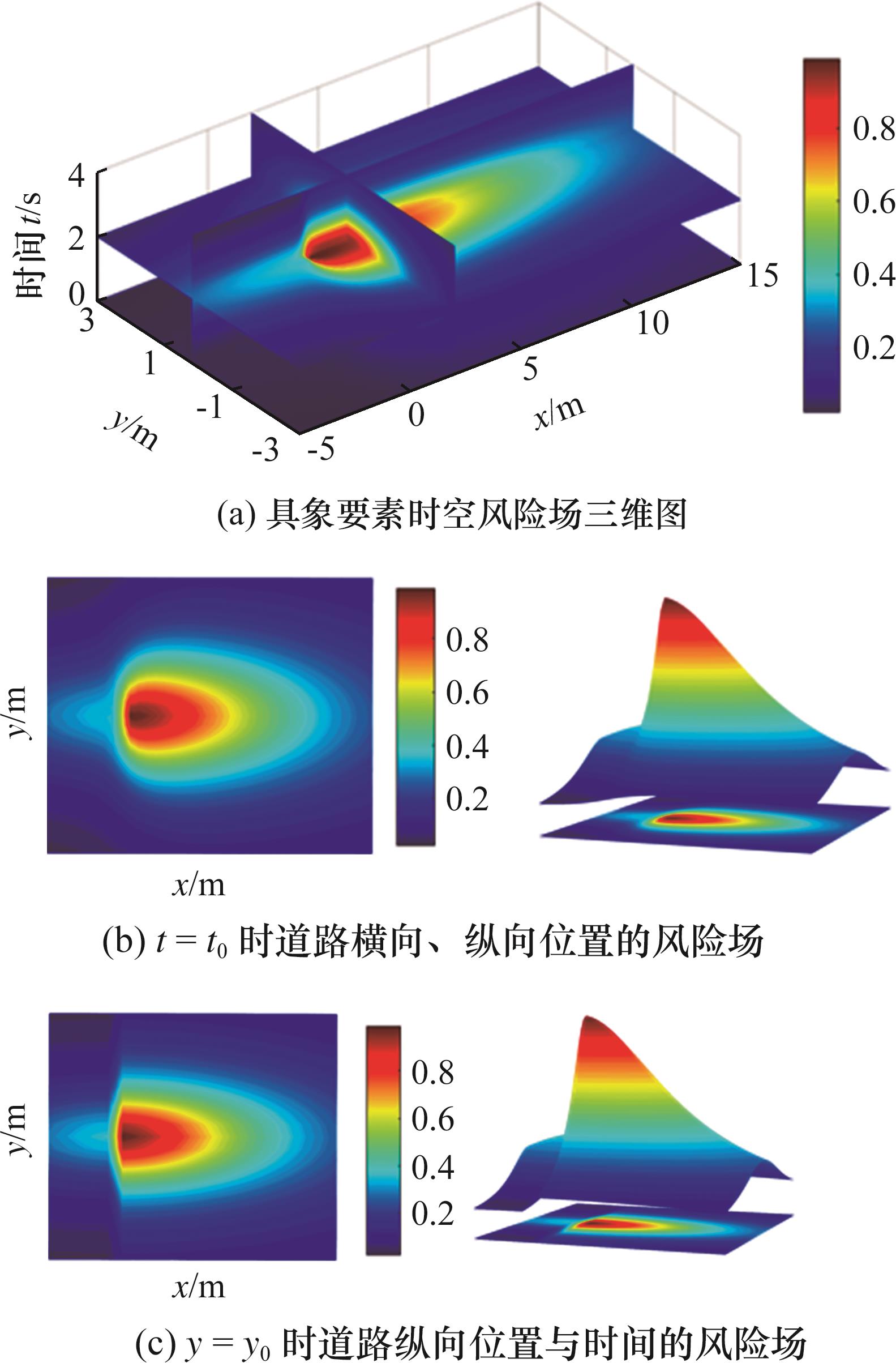
图7 具象要素时空风险场
Fig.7 Spatio-temporal risk field of concrete elements
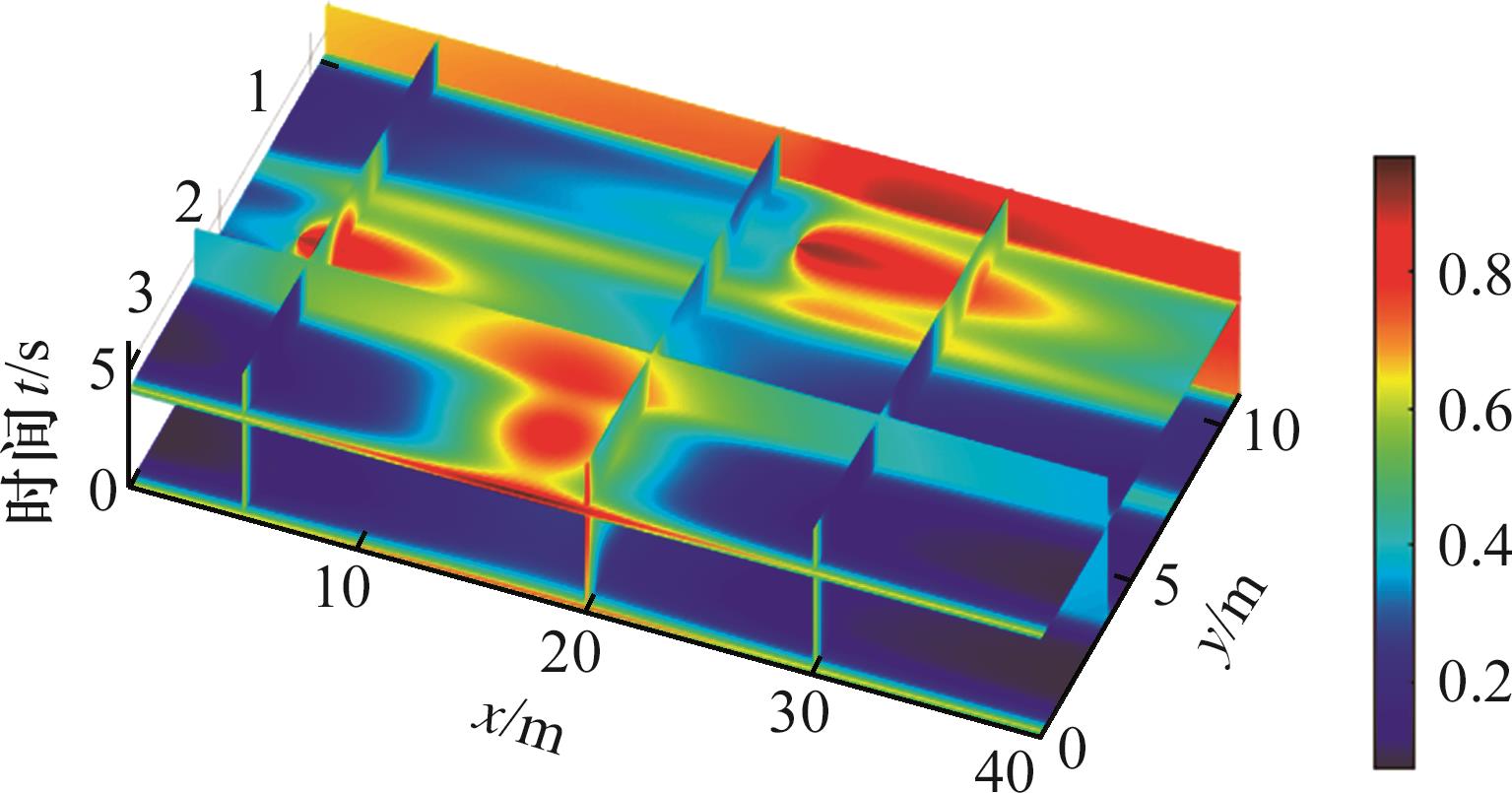
图8 时空风险场示意图
Fig.8 Schematic diagram of spatio-temporal risk field
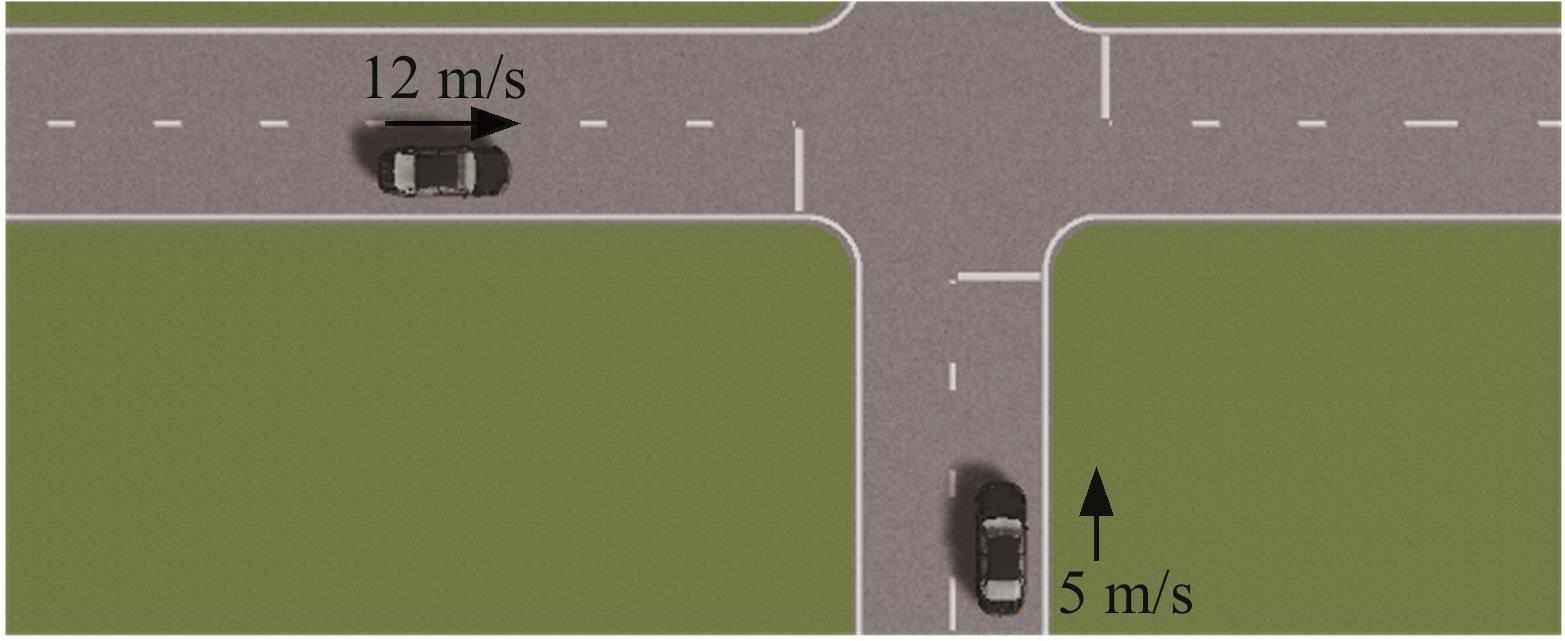
图9 十字路口场景
Fig.9 Intersection scene
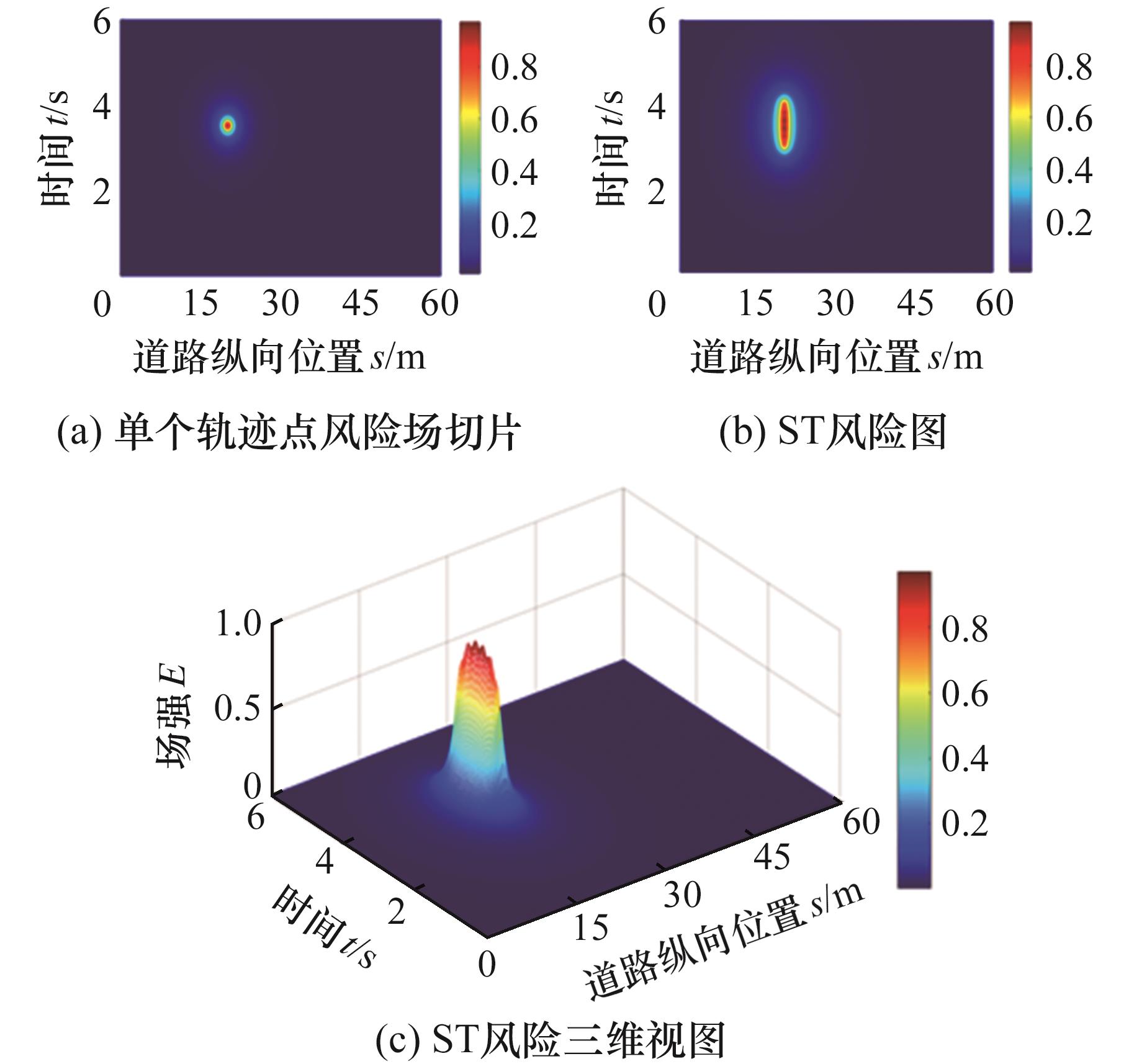
图10 ST风险图生成
Fig.10 ST risk map generation

图11 直行道路驾驶场景
Fig.11 Driving scene on a straight road
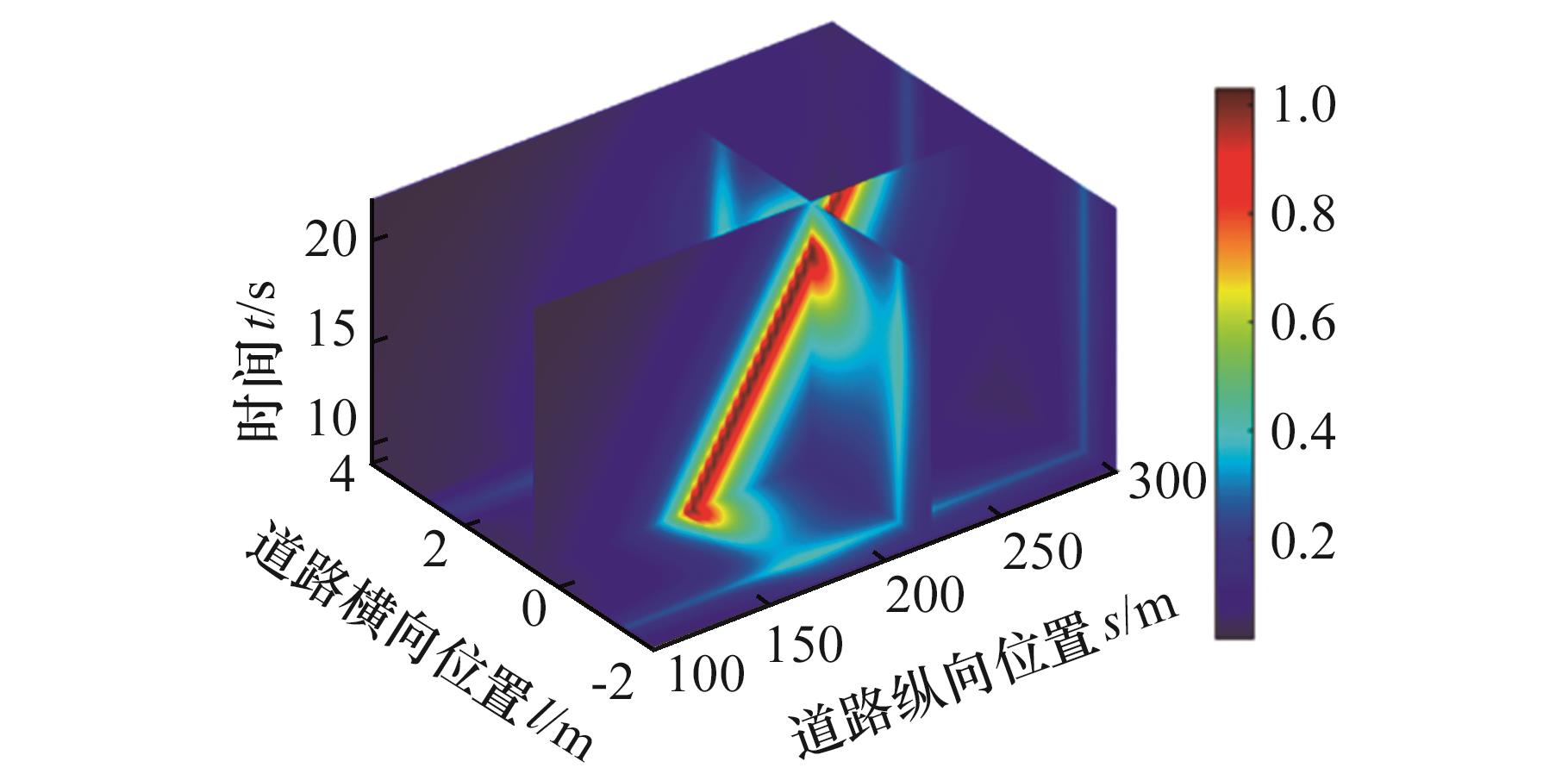
图12 直行驾驶场景时空风险
Fig.12 Spatio-temporal risk of straight-line driving scenario
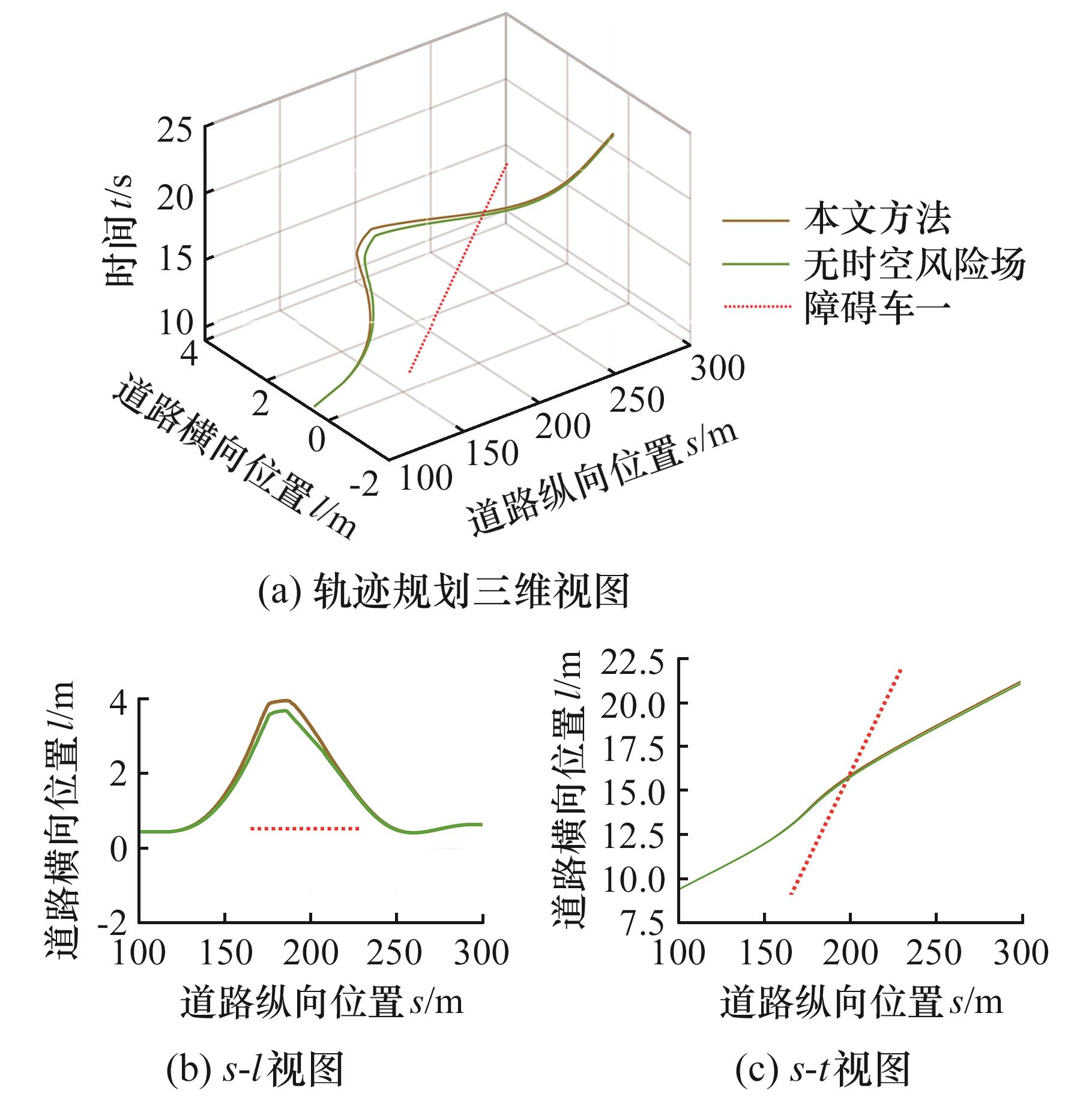
图13 轨迹规划的三维视图、s-l视图及s-t视图(场景1)
Fig.13 Three-dimensional view, s-l view and s-t view of trajectory planning(scene 1)
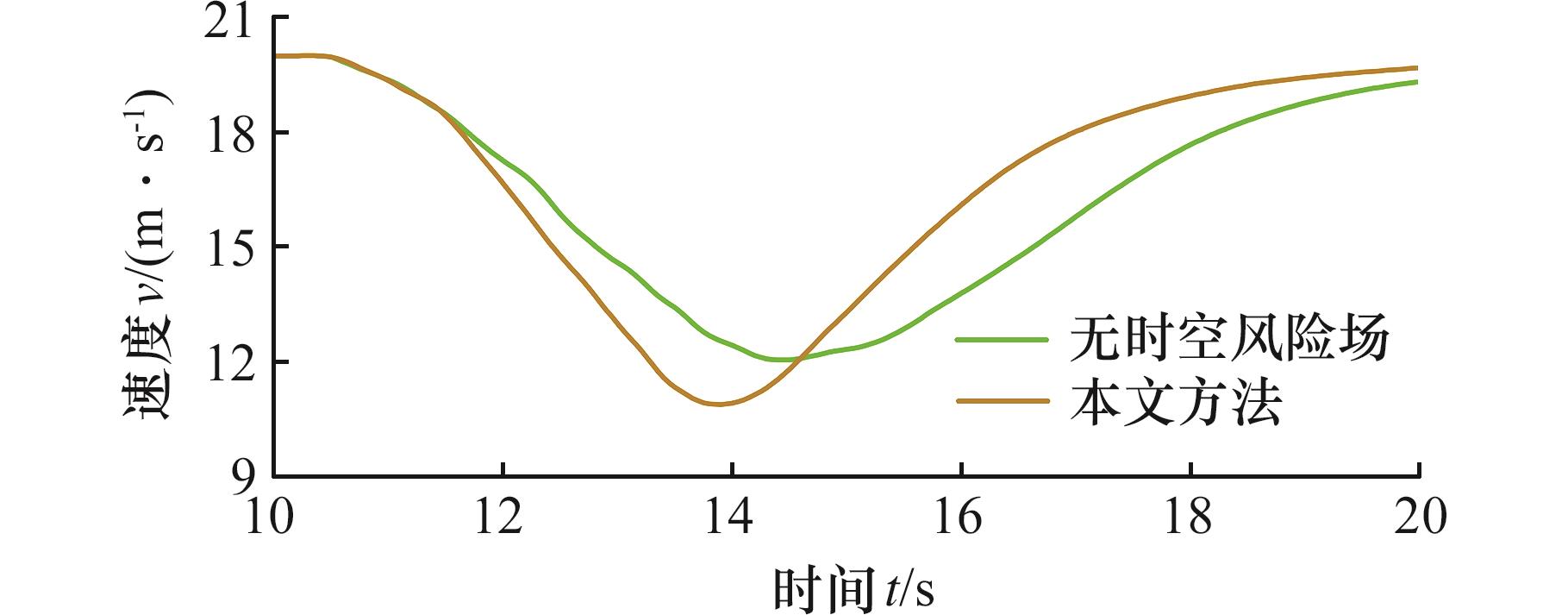
图14 速度结果曲线(场景1)
Fig.14 Velocity result curves(scene 1)
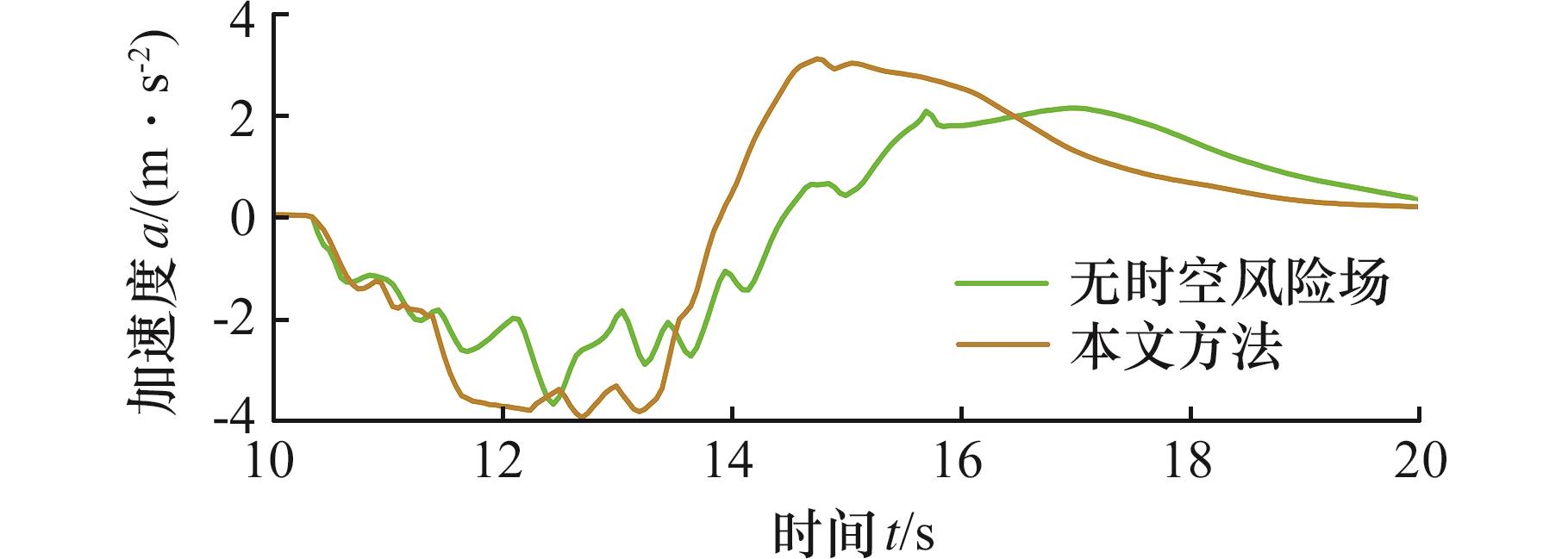
图15 加速度结果曲线(场景1)
Fig.15 Acceleration result curves(scene 1)
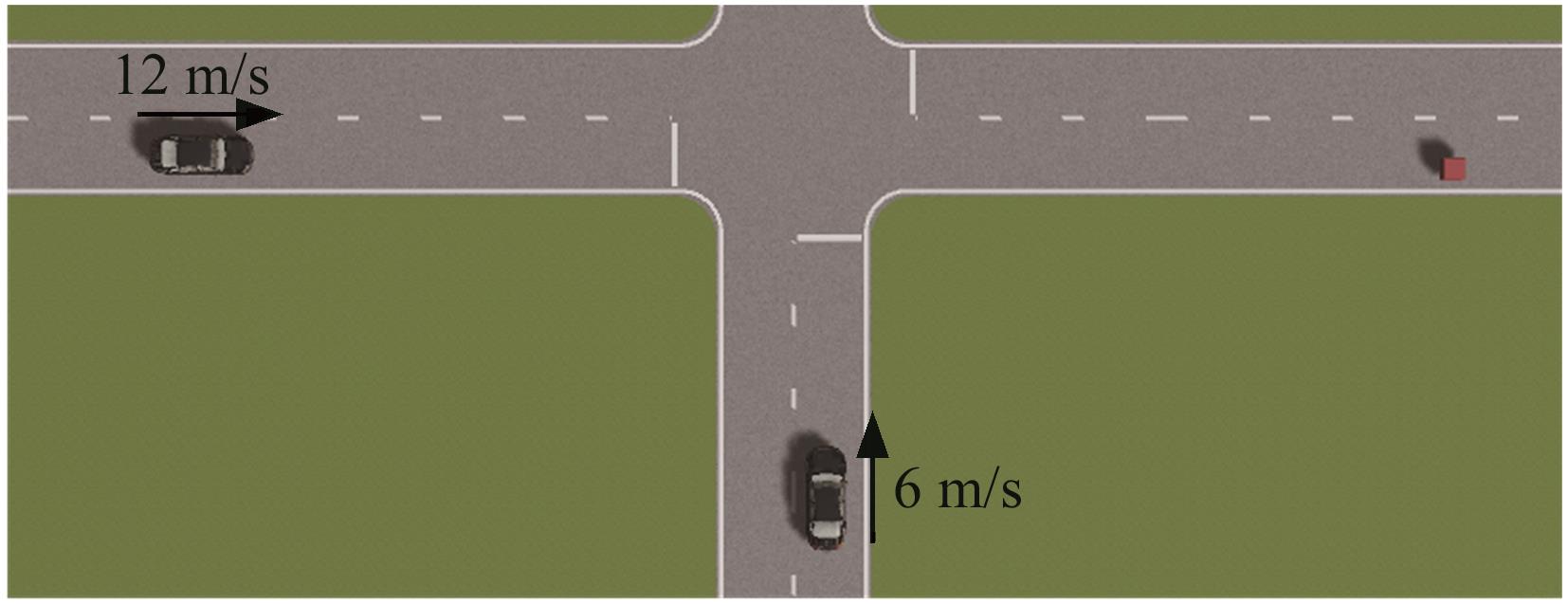
图16 无信号灯十字路口驾驶场景
Fig.16 Driving scene at an intersection without traffic lights
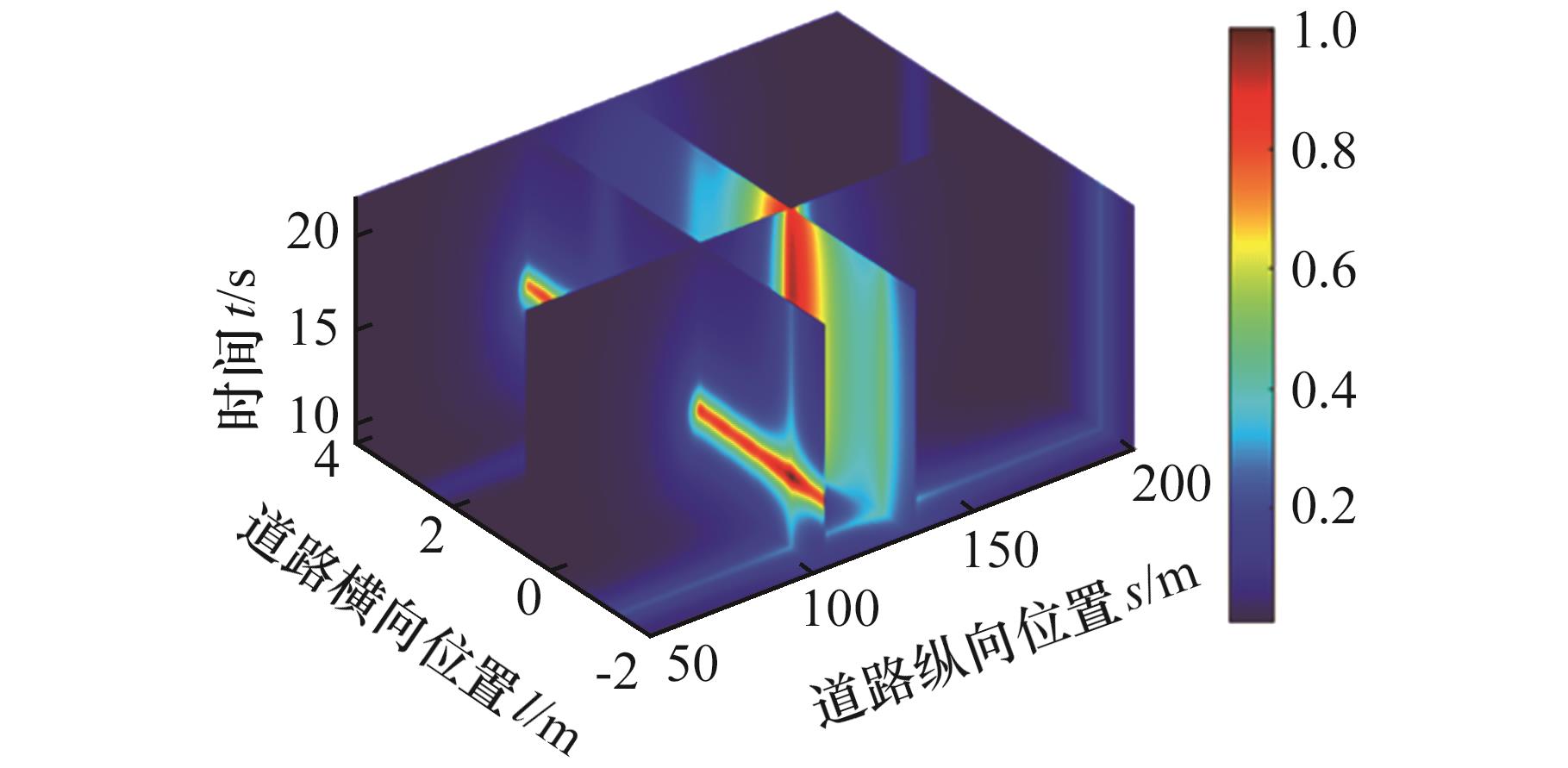
图17 十字路口场景时空风险分布
Fig.17 Spatio-temporal risk distribution of intersection scenes
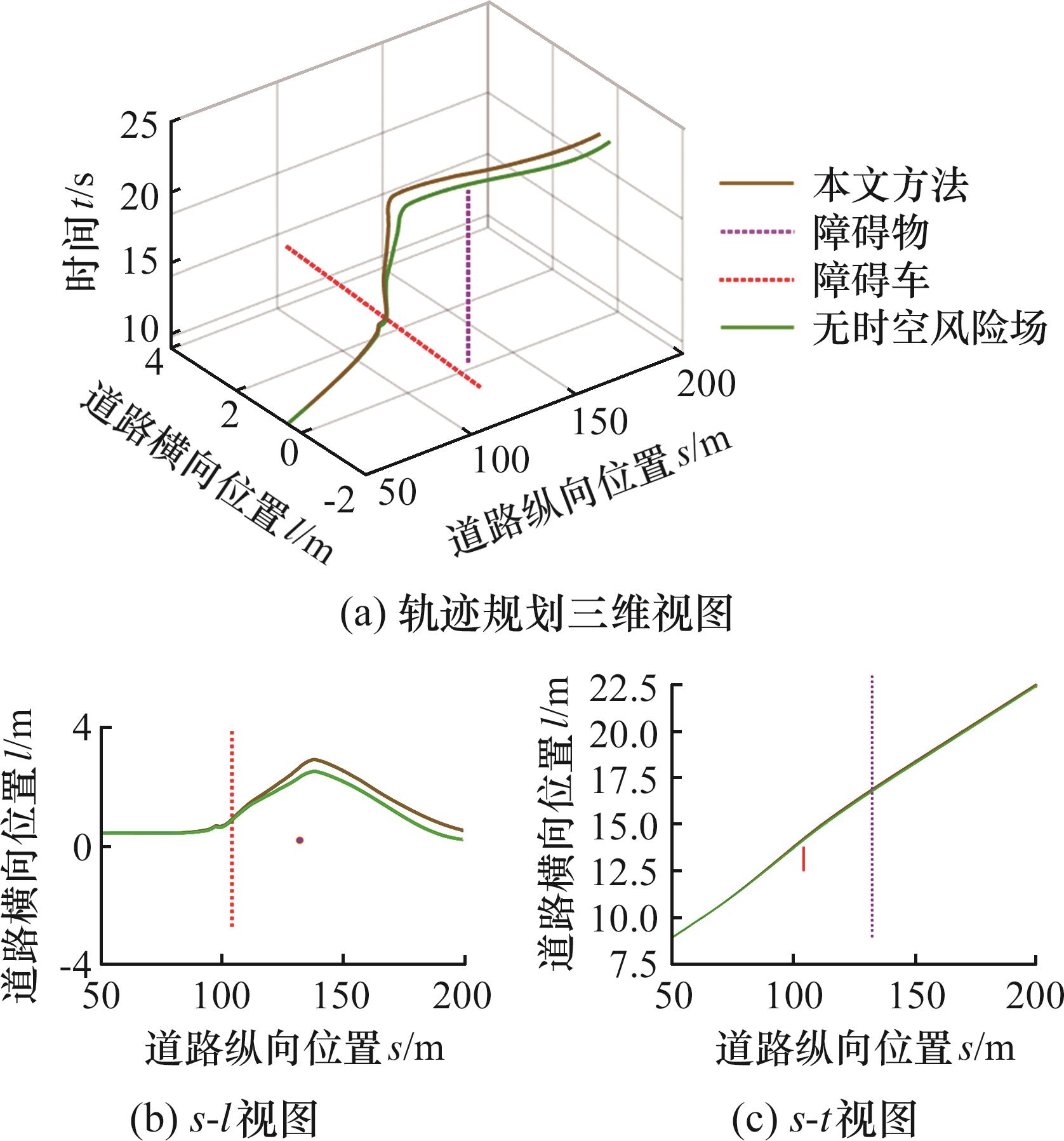
图18 轨迹规划三维视图、s-l视图及s-t视图(场景2)
Fig.18 Three-dimensional view, s-l view and s-t view of trajectory planning(scene 2)
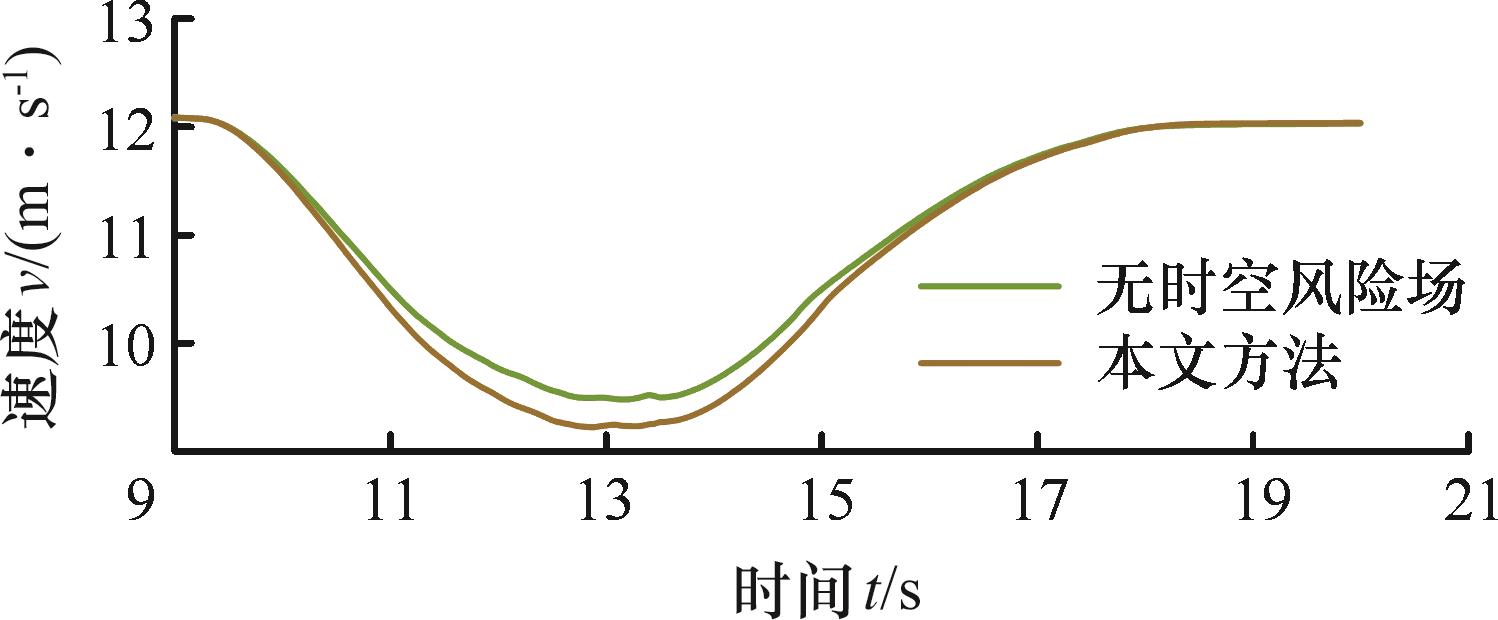
图19 速度结果曲线(场景2)
Fig.19 Velocity result curves(scene 2)
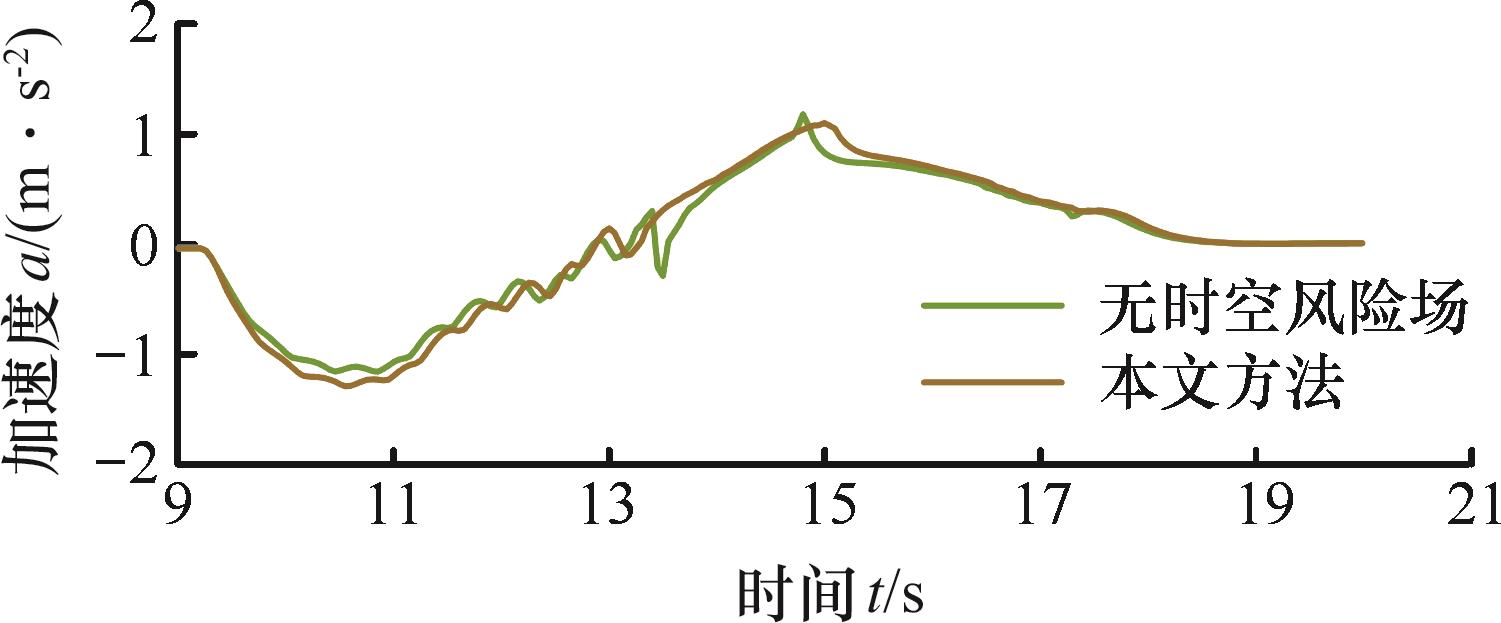
图20 加速度结果曲线(场景2)
Fig.20 Acceleration result curves(scene 2)
| [1] | 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2023[J]. 中国公路学报, 2023, 36(11):1-192. |
| Editorial Department of China Journal of Highway and Transport. Review on China's Automotive Engineering Research Progress:2023[J]. China Journal of Highway and Transport, 2023, 36(11):1-192. | |
| [2] | WANG Zhaojie, LU Guangquan, TAN Haitian, et al. A Risk-field Based Motion Planning Method for Multi-vehicle Conflict Scenario[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1):310-322. |
| [3] | KILICARSLAN M, ZHENG Jiangyu. Predict Vehicle Collision by TTC from Motion Using a Single Video Camera[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(2):522-533. |
| [4] | TYAGI I. Threat Assessment for Avoiding Collsions with Perpendicular Vehicles at Intersections[C]∥2021 IEEE International Conference on Electro Information Technology (EIT). Mt. Pleasant, 2021:184-187. |
| [5] | MANZINGER S, PEK C, ALTHOFF M. Using Reachable Sets for Trajectory Planning of Automated Vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(2):232-248. |
| [6] | ZHANG Lingtong, MA Yining, XING Xingyu, et al. Research on the Complexity Quantification Method of Driving Scenarios Based on Information Entropy[C]∥2021 IEEE International Intelligent Transportation Systems Conference (ITSC). Indianapolis, 2021:3476-3481. |
| [7] | 熊璐,吴建峰,邢星宇,等.自动驾驶汽车行驶风险评估方法综述[J].汽车工程学报, 2024, 14(5):745-759. |
| XIONG Lu, WU Jianfen, XING Xinyu, et al. A Survey of Driving Risk Assessment for Autonomous Vehicles [J]. Journal of Automotive Engineering, 2024, 14(5):745-759. | |
| [8] | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1):105-114. |
| WANG Jianqiang, WU Jian, LI Yang. Concept, Principle and Modeling of Driving Risk Field Based on Driver-Vehicle-Road Interaction[J]. China Journal of Highway and Transport, 2016, 29(1):105-114. | |
| [9] | LI Linheng, GAN Jing, YI Ziwei, et al. Risk Perception and the Warning Strategy Based on Safety Potential Field Theory[J]. Accident Analysis & Prevention, 2020, 148:105805. |
| [10] | 马艳丽, 秦钦, 董方琦, 等. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1):9-17. |
| MA Yanli, QIN Qin, DONG Fangqi, et al. Takeover Risk Assessment Model Based on Risk Field Theory under Different Cognitive Secondary Tasks[J]. Automotive Engineering, 2024, 46(1):9-17. | |
| [11] | 褚端峰,彭赛骞,胡海洋,等.预见性驾驶风险场模型[J]. 机械工程学报, 2024, 60(10):160-170. |
| CHU Duanfeng, PENG Saiqian, HU Haiyang, et al. Predictive Driving Risk Field Model [J]. Chinese Journal of Mechanical Engineering, 2024, 60(10):160-170.. | |
| [12] | 张志文, 刘伯威, 张继园, 等. 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划[J]. 中国机械工程, 2024, 35(6):993-999. |
| ZHANG Zhiwen, LIU Bowei, ZHANG Jiyuan, et al. Cooperative Optimization of Intelligent Vehicle Path Planning Based on PSO-SSA and RRT[J]. China Mechanical Engineering, 2024, 35(6):993-999. | |
| [13] | 杨超, 杨帆, 王伟达, 等. 基于时空风险的智能驾驶车辆避险决策规划[J]. 汽车工程, 2024, 46(6):975-984. |
| YANG Chao, YANG Fan, WANG Weida, et al. Risk Avoidance Decision Planning for Intelligent Driving Vehicles Based on Spatiotemporal Risk[J]. Automotive Engineering, 2024, 46(6):975-984. | |
| [14] | KIM D, KIM H, HUH K. Local Trajectory Planning and Control for Autonomous Vehicles Using the Adaptive Potential Field[C]∥2017 IEEE Conference on Control Technology and Applications (CCTA). Hawaii, 2017:987-993. |
| [15] | HUANG Yanjun, DING Haitao, ZHANG Yubiao, et al. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field Elaborated Resistance Network Approach[J]. IEEE Transactions on Industrial Electronics, 2020, 67(2):1376-1386. |
| [16] | 王明强, 王震坡, 张雷. 基于碰撞风险评估的智能汽车局部路径规划方法研究[J]. 机械工程学报, 2021, 57(10):28-41. |
| WANG Mingqiang, WANG Zhenpo, ZHANG Lei. Local Path Planning for Intelligent Vehicles Based on Collision Risk Evaluation[J]. Journal of Mechanical Engineering, 2021, 57(10):28-41. | |
| [17] | WANG Mingqiang, ZHANG Lei, ZHANG Zhiqiang, et al. A Hybrid Trajectory Planning Strategy for Intelligent Vehicles in On-road Dynamic Scenarios[J]. IEEE Transactions on Vehicular Technology, 2023, 72(3):2832-2847. |
| [18] | 韩嘉懿. 基于驾驶人行为理解的智能汽车人机触觉交互协同转向控制研究[D]. 长春:吉林大学, 2022. |
| HAN Jiayi. Research on Human-Machine Haptic Interactive Shared Steering Control Based on Driver Behavior Understanding for Intelligent Vehicle [D]. Changchun:Jilin University, 2022. | |
| [19] | 王安杰, 郑玲, 李以农, 等. 基于预测风险场的智能汽车主动避撞运动规划[J]. 汽车工程, 2021, 43(7):1096-1104. |
| WANG Anjie, ZHENG Ling, LI Yinong, et al. Motion Planning for Active Collision Avoidance of Intelligent Vehicles Based on Predictive Risk Field[J]. Automotive Engineering, 2021, 43(7):1096-1104. |
| [1] | 赵丁选, 郭瑞, 王硕, 闫长长, 王子鹤, 张天赐. 复杂地形环境下无人步履式挖掘机的车身姿态规划方法[J]. 中国机械工程, 2026, 37(1): 233-242. |
| [2] | 刘建林, 黄海松, 范青松, 马驰, 张浪浪. 基于改进樽海鞘群算法的机械臂多目标轨迹规划研究[J]. 中国机械工程, 2025, 36(09): 2047-2056. |
| [3] | 王志强1, 韩建海1, 2, 3, 李向攀1, 2, 郭冰菁1, 2, 杜敢琴4. 冗余机器人的笛卡儿空间螺旋线性插值轨迹规划[J]. 中国机械工程, 2025, 36(01): 104-112. |
| [4] | 刘俊玲, 冯港辉, 张俊江, 杨凯. 无人驾驶混合动力汽车轨迹跟踪节能控制融合研究[J]. 中国机械工程, 2024, 35(04): 678-690. |
| [5] | 荣誉, 陈刚, 豆天赐, . 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(02): 305-316. |
| [6] | 吴超群, 赵松, 雷艇. 曲线焊缝的机器人焊接轨迹规划与高频控制[J]. 中国机械工程, 2023, 34(14): 1723-1728. |
| [7] | 李佳璇, 李论, 周波, 赵吉宾, 朱光, 王正佳, . 基于Preston-PSO算法的多方向机器人磨抛轨迹生成方法[J]. 中国机械工程, 2023, 34(14): 1729-1740. |
| [8] | 刘栋财, 董广宇, 杜玉红, 李文鹏, . 基于网格搜索算法的6-RUS并联机器人时间最优轨迹规划[J]. 中国机械工程, 2023, 34(13): 1589-1598. |
| [9] | 张荣珅, 王玉田, 胡荣权, 杨灵芳, 黄智. 名义代价期望目标下的智能车辆困境避险规划[J]. 中国机械工程, 2022, 33(15): 1849-1856. |
| [10] | 潘国威, 陈文亮. 冗余混联式钻铆机床姿态调整轨迹优化[J]. 中国机械工程, 2021, 32(21): 2571-2576,2589. |
| [11] | 孙晓军, 宋代平, 林敬周, 韩伟航. 风洞上攻角机器人轨迹规划算法研究与实现[J]. 中国机械工程, 2021, 32(16): 1963-1971. |
| [12] | 李茂月;吕虹毓;王飞;贾冬开. 基于机器视觉的智能车辆鲁棒车道线识别方法[J]. 中国机械工程, 2021, 32(02): 242-251. |
| [13] | 刘志强1;顾献安1;郭昊1;奚浩1;王明强1;李军利2. 碳纤维螺旋桨自动铺放成形轨迹规划方法[J]. 中国机械工程, 2020, 31(17): 2079-2084,2094. |
| [14] | 刘吉成;季洪超. 新型轮腿机器人步态规划策略[J]. 中国机械工程, 2019, 30(18): 2257-2262. |
| [15] | 隗寒冰;任培林. 插电式柴电混合动力汽车规则控制及处理器在环测试[J]. 中国机械工程, 2019, 30(13): 1590-1599. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||