


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (2): 295-303.DOI: 10.3969/j.issn.1004-132X.2026.02.005
• 先进流体系统设计与优化专栏 • 上一篇
苏世杰1( ), 程泳钦1, 胡毅1,2, 何建辉1, 杨书吉1
), 程泳钦1, 胡毅1,2, 何建辉1, 杨书吉1
收稿日期:2024-09-10
出版日期:2026-02-25
发布日期:2026-03-13
通讯作者:
苏世杰
作者简介:苏世杰*(通信作者),男,1981年生,教授、博士。研究方向为电液伺服控制、智能控制以及仿生机械设计等。E-mail:sushijie@just.edu.cn。
基金资助:
SU Shijie1(), CHENG Yongqin1, HU Yi1,2, HE Jianhui1, YANG Shuji1
Received:2024-09-10
Online:2026-02-25
Published:2026-03-13
Contact:
SU Shijie
摘要:
为提高异构双阀电液伺服系统的控制性能,在融合强化学习与自适应鲁棒控制算法的异构双阀协调控制策略SAC-ARC的基础上,开展SAC-ARC控制策略仿真分析及实验验证。首先利用AMESim和Simulink软件平台建立了液压系统联合仿真模型,分析了不同比例阀控制信号补偿策略下异构双阀电液伺服系统的跟踪性能。然后对比仿真了SAC-ARC与PID、ARC及RBF-ARC控制策略在多种复合信号及系统受到内外扰动等复杂工况下的跟踪误差,以验证其跟踪性能与鲁棒性。最后在搭建的实验平台上进行了实验验证。仿真与实验结果表明:SAC-ARC控制策略在各工况下均表现出优异的跟踪性能,其最大瞬态误差和累计跟踪误差均显著低于其他对比控制策略,验证了该控制策略在异构双阀电液伺服系统中的有效性与优越性。
中图分类号:
苏世杰, 程泳钦, 胡毅, 何建辉, 杨书吉. 融合强化学习自适应鲁棒控制算法的异构双阀协调控制策略仿真及实验[J]. 中国机械工程, 2026, 37(2): 295-303.
SU Shijie, CHENG Yongqin, HU Yi, HE Jianhui, YANG Shuji. Simulation and Experimental on Coordination Control of Dual-Valve Electrohydraulic Servo Systems Based on Integration of Reinforcement Learning and Adaptive Robust Control Algorithm[J]. China Mechanical Engineering, 2026, 37(2): 295-303.
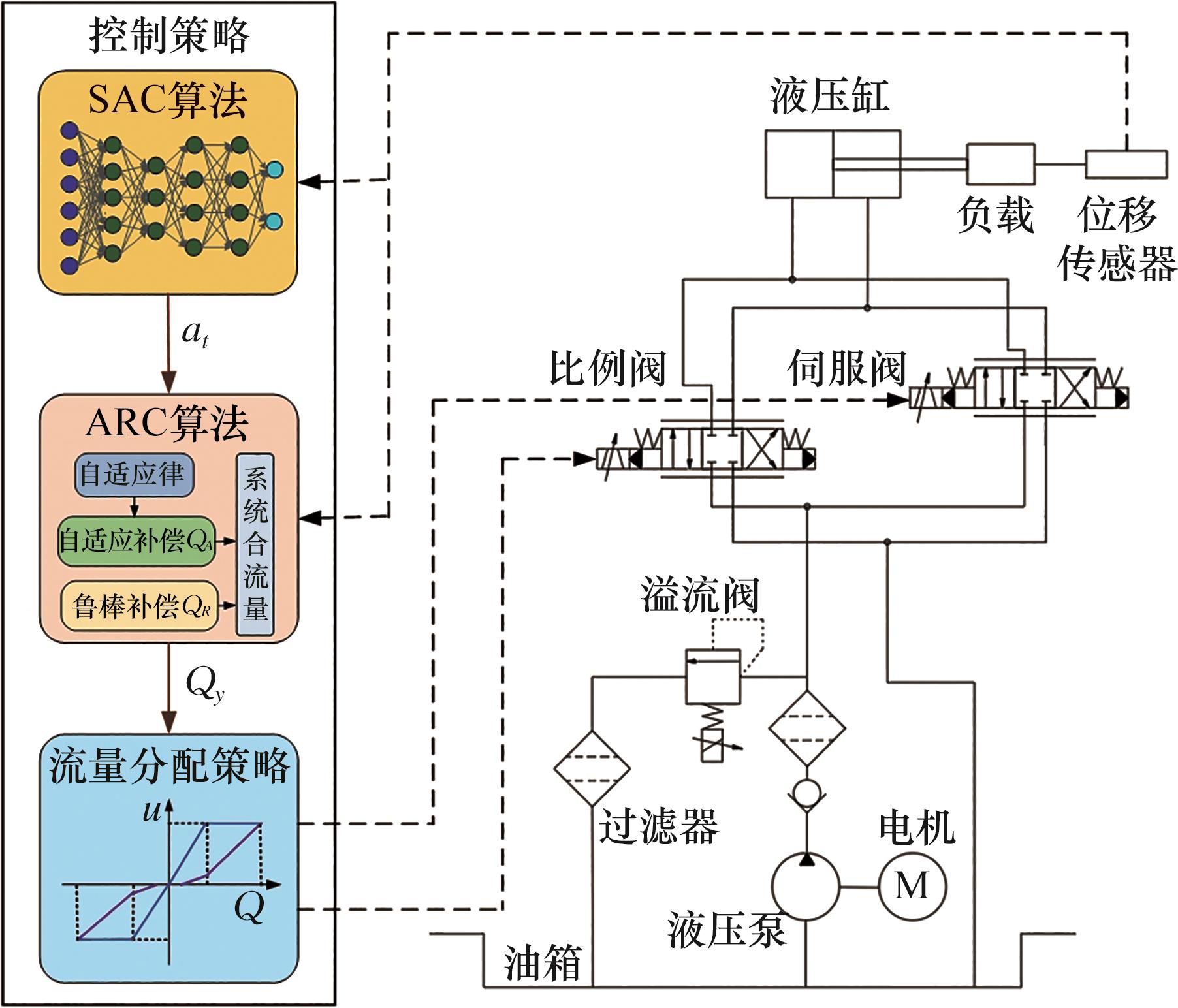
图1 异构双阀协调控制系统控制模型
Fig.1 The control model of dual-valve electro-hydraulic servo system
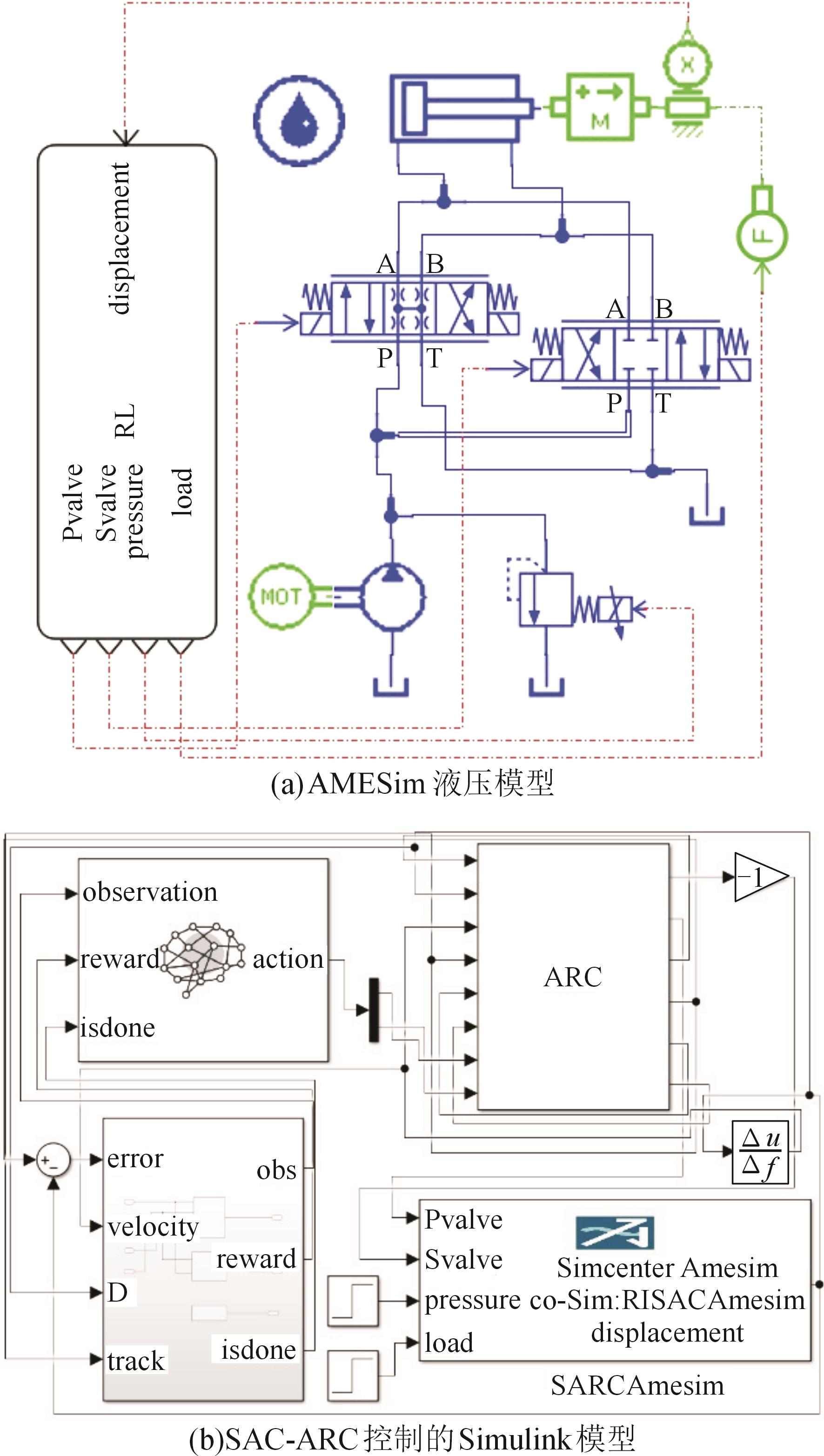
图2 联合仿真模型
Fig.2 The co-simulation model
| 参数 | 数值 |
|---|---|
| 液压泵的排量/(mL·r-1) | 10 |
| 电机的转速/(r·min-1) | 1440 |
| 活塞行程/m | 0.2 |
| 活塞杆直径/m | 0.05 |
| 活塞直径/m | 0.1 |
| 溢流阀的启动压力/MPa | 14 |
| 负载质量/kg | 100 |
| 比例阀的死区/% | 15 |
| 比例阀的额定压降/MPa | 7 |
| 比例阀的最大流量/(L·min-1) | 12 |
| 比例阀的响应频率/Hz | 15 |
| 伺服阀的额定压降/MPa | 7 |
| 伺服阀的最大流量/(L·min-1) | 4 |
| 伺服阀的响应频率/Hz | 60 |
表1 联合仿真参数
Tab.1 Co-simulation parameters
| 参数 | 数值 |
|---|---|
| 液压泵的排量/(mL·r-1) | 10 |
| 电机的转速/(r·min-1) | 1440 |
| 活塞行程/m | 0.2 |
| 活塞杆直径/m | 0.05 |
| 活塞直径/m | 0.1 |
| 溢流阀的启动压力/MPa | 14 |
| 负载质量/kg | 100 |
| 比例阀的死区/% | 15 |
| 比例阀的额定压降/MPa | 7 |
| 比例阀的最大流量/(L·min-1) | 12 |
| 比例阀的响应频率/Hz | 15 |
| 伺服阀的额定压降/MPa | 7 |
| 伺服阀的最大流量/(L·min-1) | 4 |
| 伺服阀的响应频率/Hz | 60 |
| 参数 | 数值 |
|---|---|
| 激活函数 | ReLU |
| 学习率( | 0.001 |
| 衰减因子( | 0.99 |
| 记忆缓冲区的数量 | |
| 隐藏层的单元数 (所有网络) | 128 |
| 隐藏层数目 | 3 |
表2 SAC网络训练超参数
Tab.2 Training hyperparameters of SAC network
| 参数 | 数值 |
|---|---|
| 激活函数 | ReLU |
| 学习率( | 0.001 |
| 衰减因子( | 0.99 |
| 记忆缓冲区的数量 | |
| 隐藏层的单元数 (所有网络) | 128 |
| 隐藏层数目 | 3 |
| 样本分类 | 样本模型 | |
|---|---|---|
| 复合信号S0 | ||
| 内部扰动 | y={10 mm/s(滑块速度),2 s(周期), 10 mm(振幅)} | |
| 不确定性信号 | 复合斜坡信号S1 | |
| 阶梯信号S2 | y={10 mm/s(滑块速度),2 s(周期), k mm(振幅)}, | |
| 方波信号S3 | ||
| 时变正弦信号S4 | ||
表3 训练样本设计
Tab 3 Training sample set
| 样本分类 | 样本模型 | |
|---|---|---|
| 复合信号S0 | ||
| 内部扰动 | y={10 mm/s(滑块速度),2 s(周期), 10 mm(振幅)} | |
| 不确定性信号 | 复合斜坡信号S1 | |
| 阶梯信号S2 | y={10 mm/s(滑块速度),2 s(周期), k mm(振幅)}, | |
| 方波信号S3 | ||
| 时变正弦信号S4 | ||
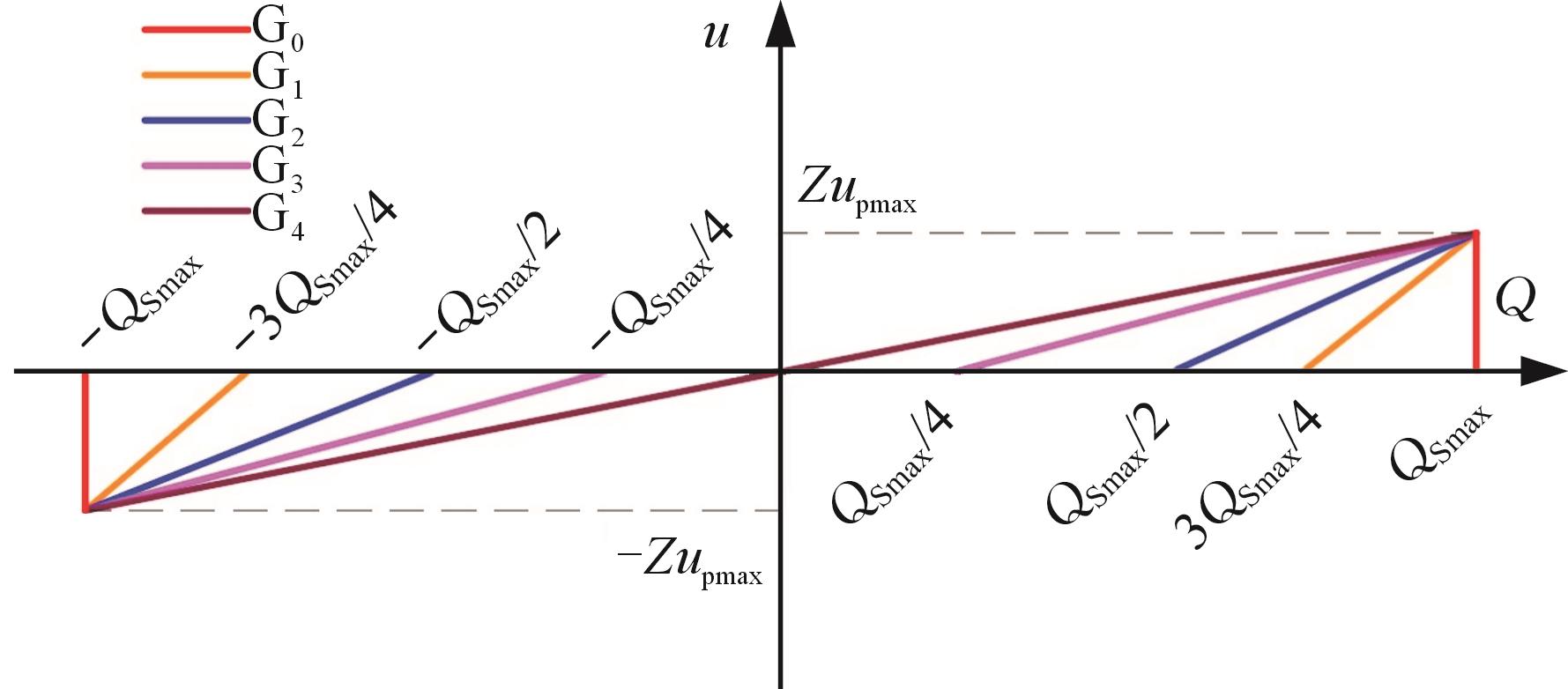
图3 不同补偿策略下的比例阀控制信号
Fig.3 Proportional valve control signals with different compensation strategies
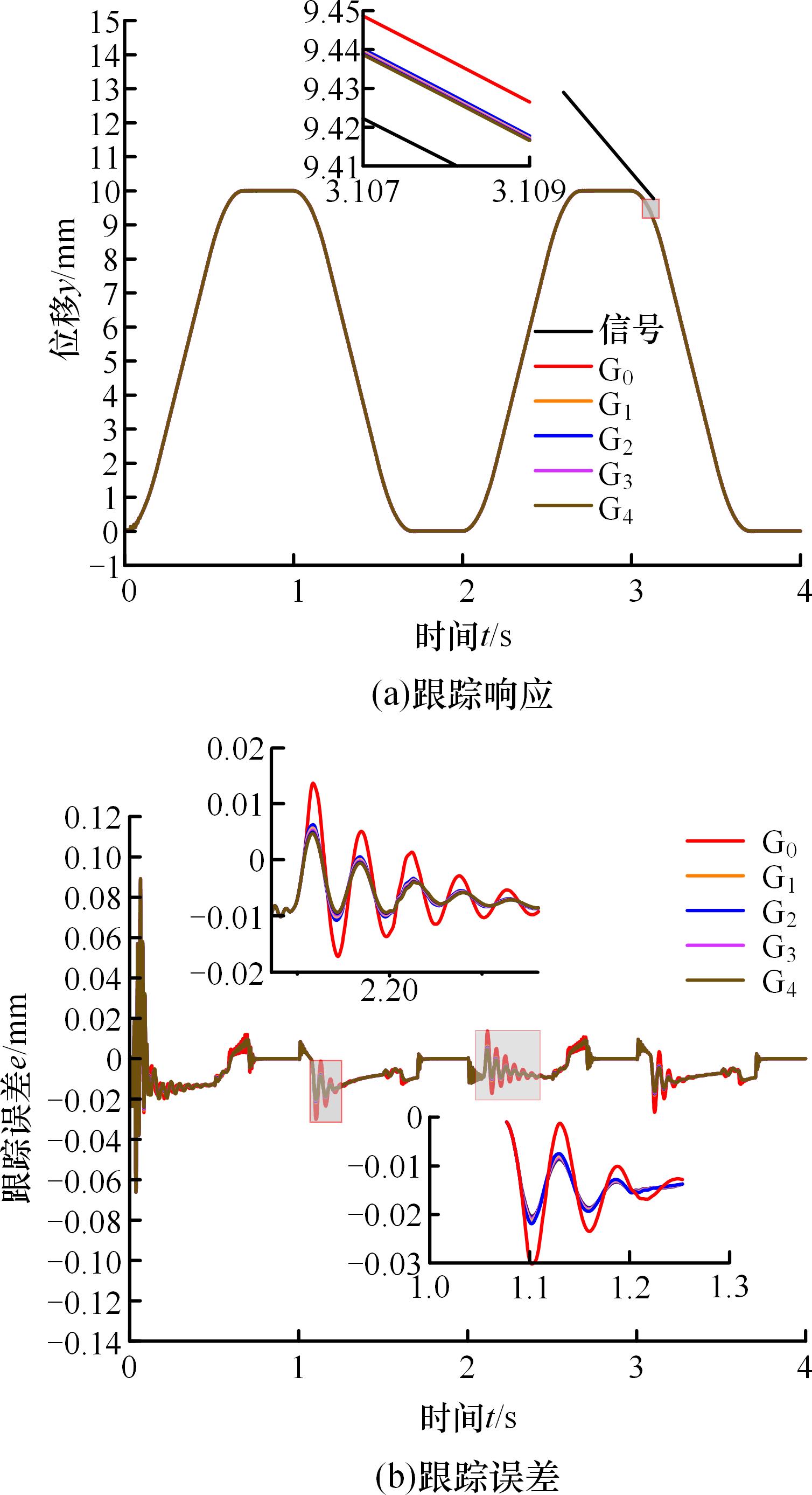
图4 比例阀在不同控制信号补偿策略下的响应与误差
Fig.4 Responses and tracking errors of the proportional valve under different control signal compensation strategies
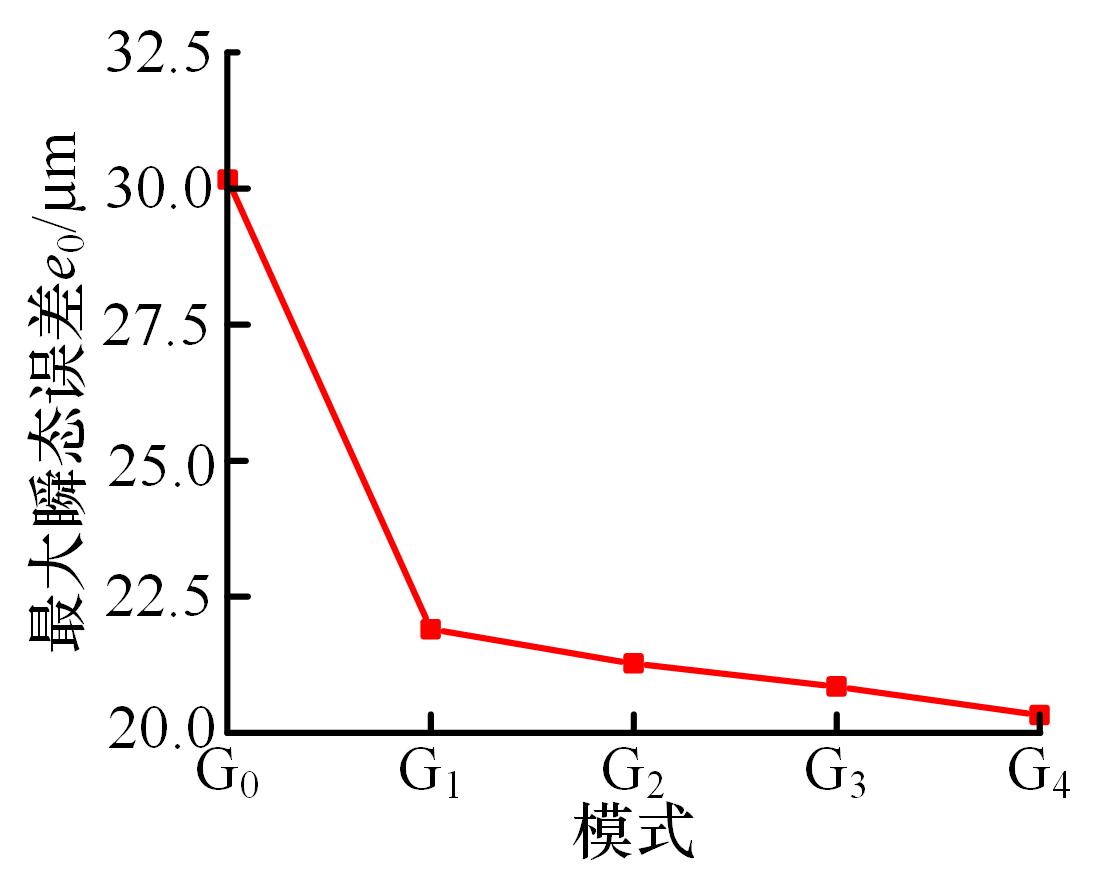
图5 比例阀在不同控制信号补偿策略下的最大跟踪误差
Fig.5 Maximum tracking error of the proportional valve under different control signal compensation strategies
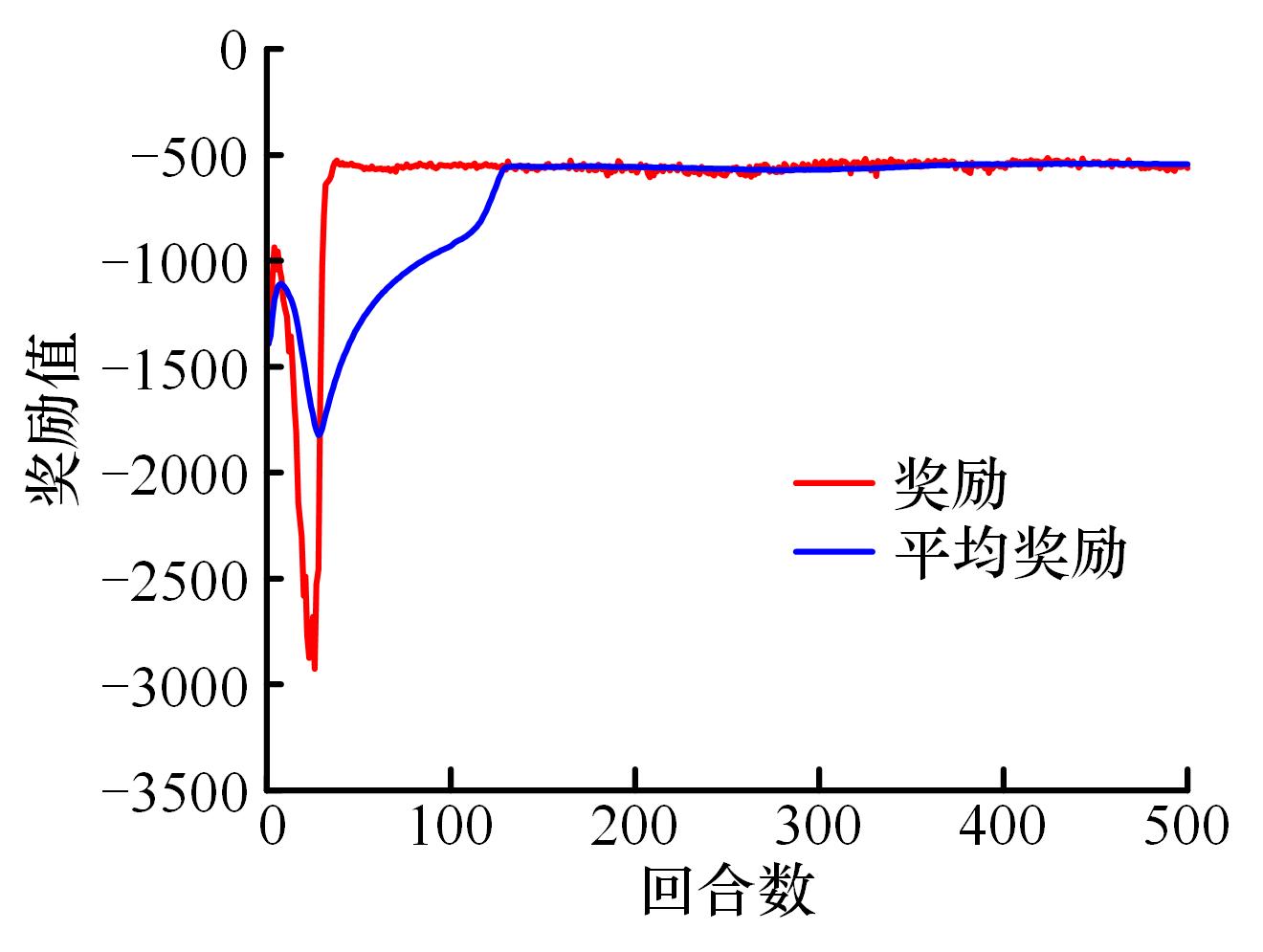
图6 SAC-ARC控制策略的训练过程
Fig.6 The training process of the SAC-ARC control strategy
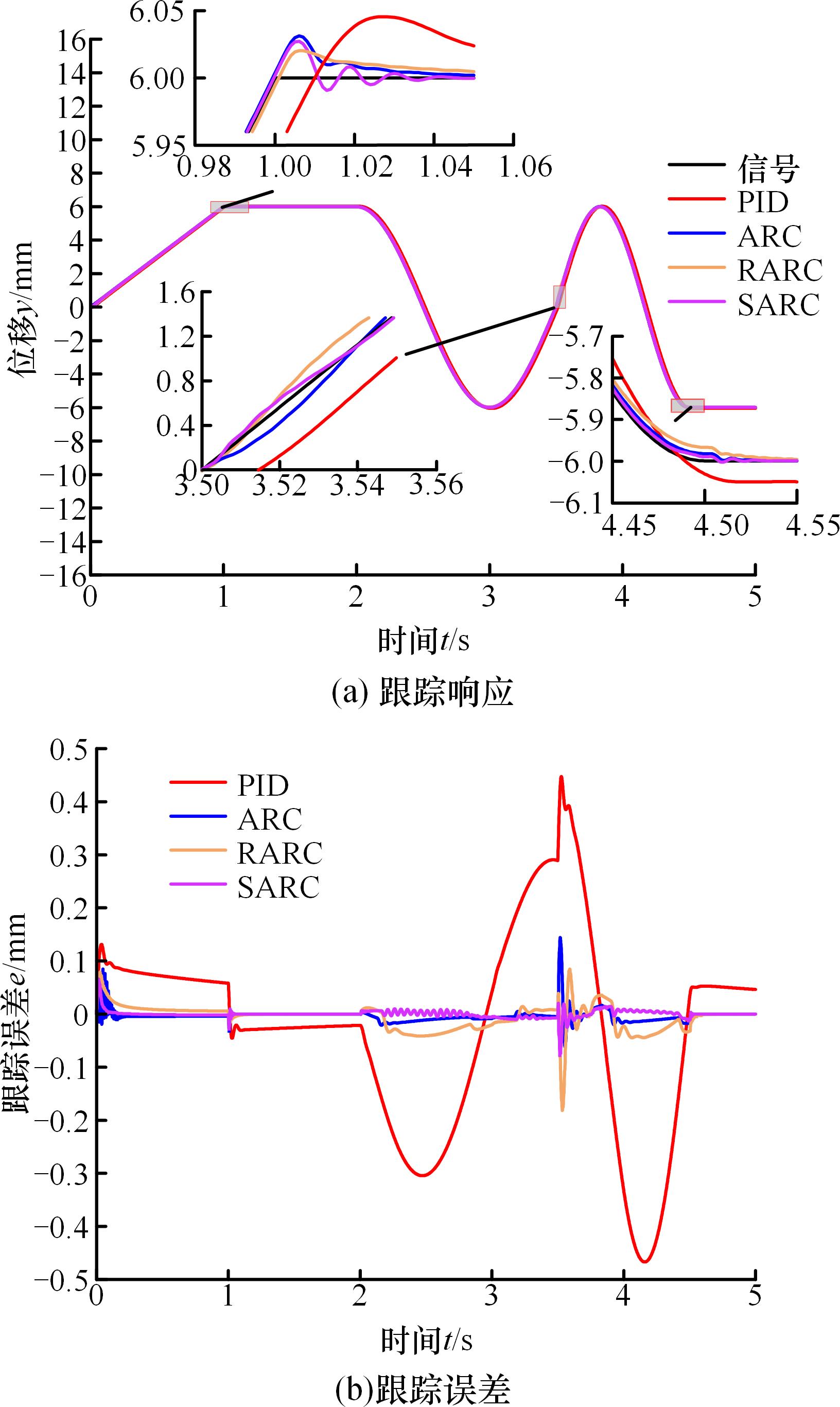
图7 不同控制策略在跟踪复合信号时的响应与误差
Fig.7 Responses and tracking errors of the composite signal input for various control strategies
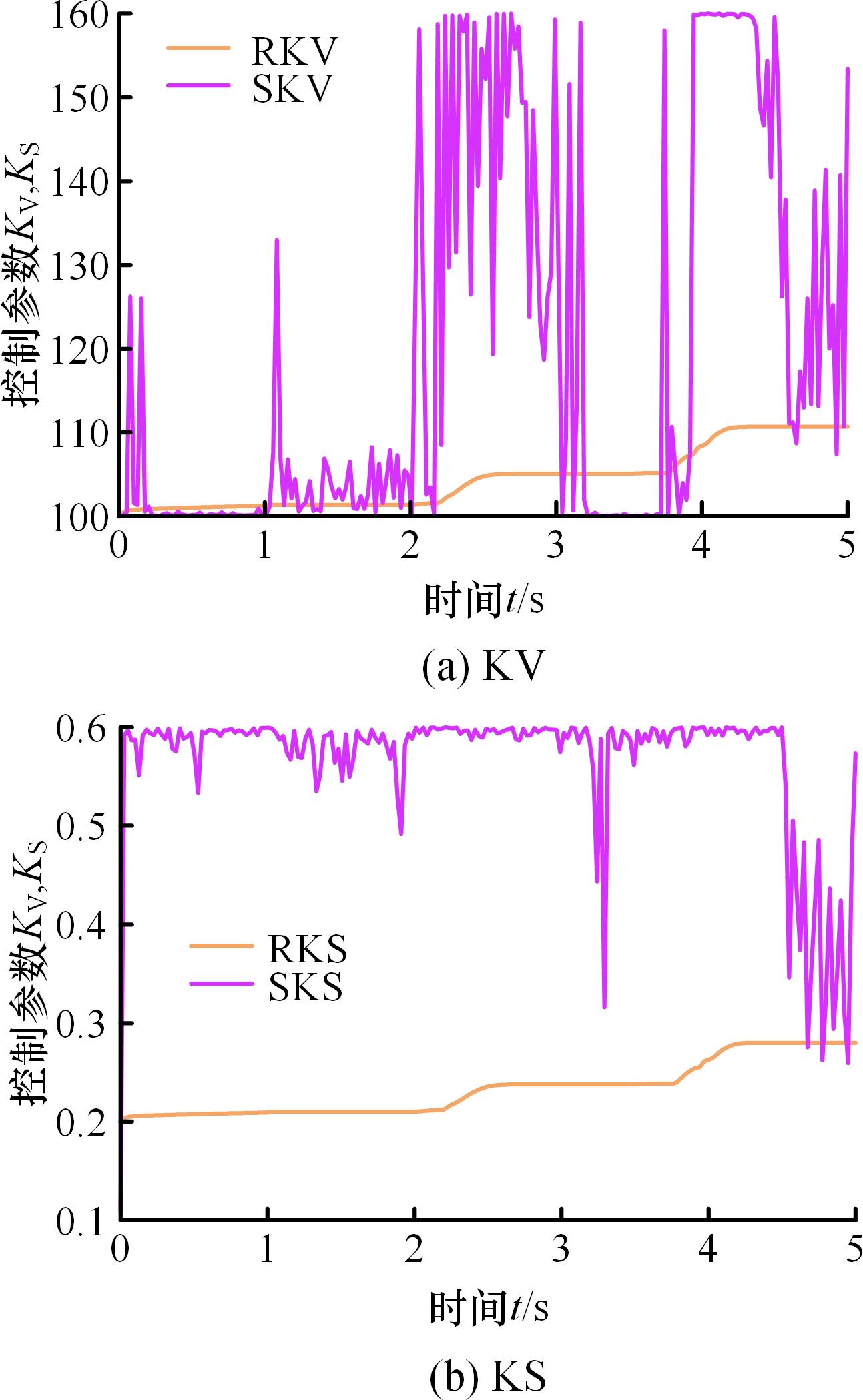
图8 RBF-ARC和SAC-ARC控制策略在跟踪复合信号时的ARC控制参数
Fig.8 ARC parameters of RBF-ARC and SAC-ARC control strategies when tracking composite signals
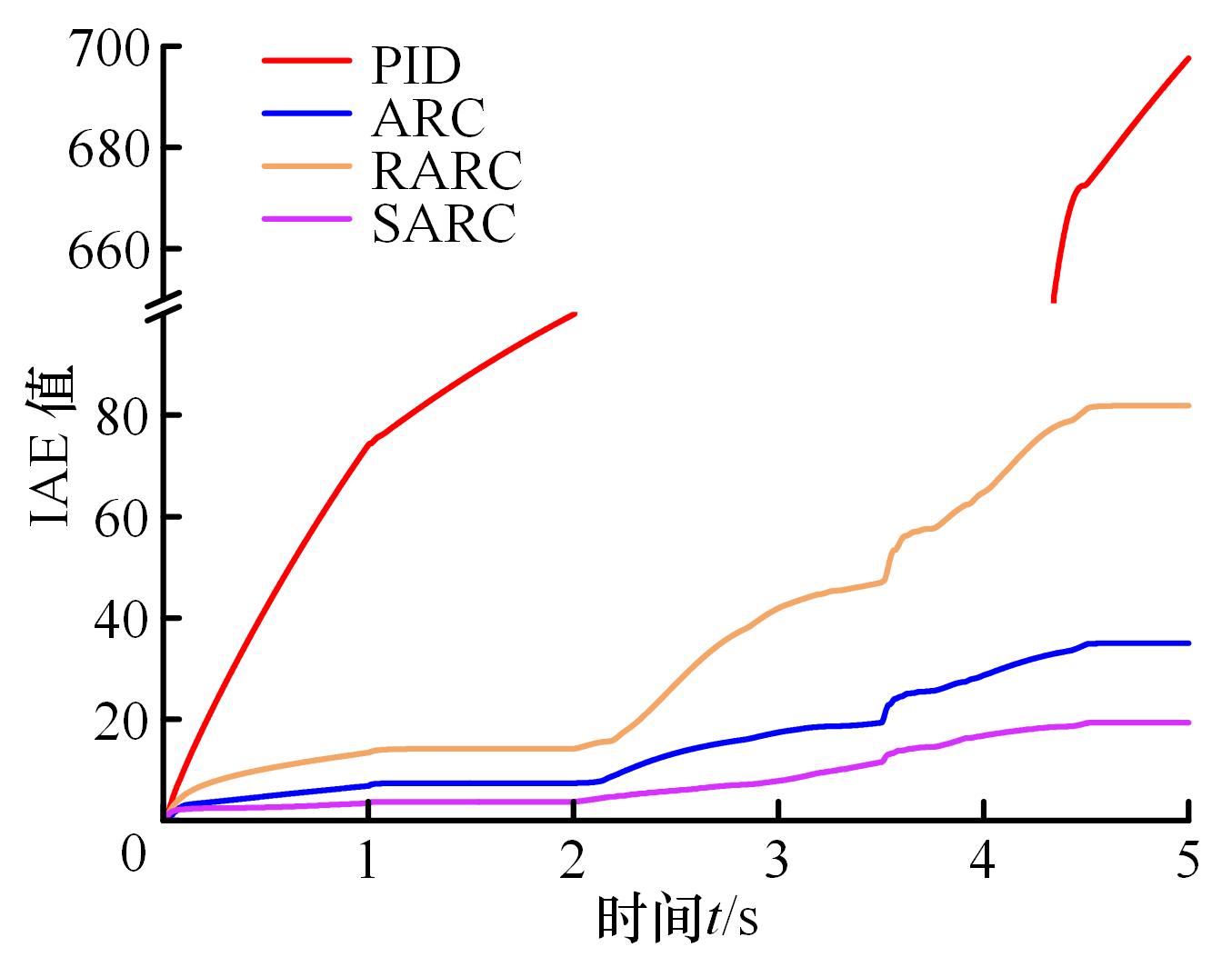
图9 不同控制策略在跟踪复合信号时的IAE误差
Fig.9 The IAE value of the composite signal input for various control strategies
| 工况/参数 | P/MPa | Z/kN | ||
|---|---|---|---|---|
| W1 | 6 | 1.2 | 10 | 2.4 |
| W2 | 6 | 1.2 | 15 | 3.4 |
| W3 | 5 | 2.2 | 5 | 1.4 |
| W4 | 5 | 2.2 | 15 | 3.4 |
| W5 | 4 | 3.2 | 5 | 1.4 |
| W6 | 4 | 3.2 | 10 | 2.4 |
表4 随机扰动工况参数取值
Tab.4 Parameter values of randomly disturbance conditions
| 工况/参数 | P/MPa | Z/kN | ||
|---|---|---|---|---|
| W1 | 6 | 1.2 | 10 | 2.4 |
| W2 | 6 | 1.2 | 15 | 3.4 |
| W3 | 5 | 2.2 | 5 | 1.4 |
| W4 | 5 | 2.2 | 15 | 3.4 |
| W5 | 4 | 3.2 | 5 | 1.4 |
| W6 | 4 | 3.2 | 10 | 2.4 |
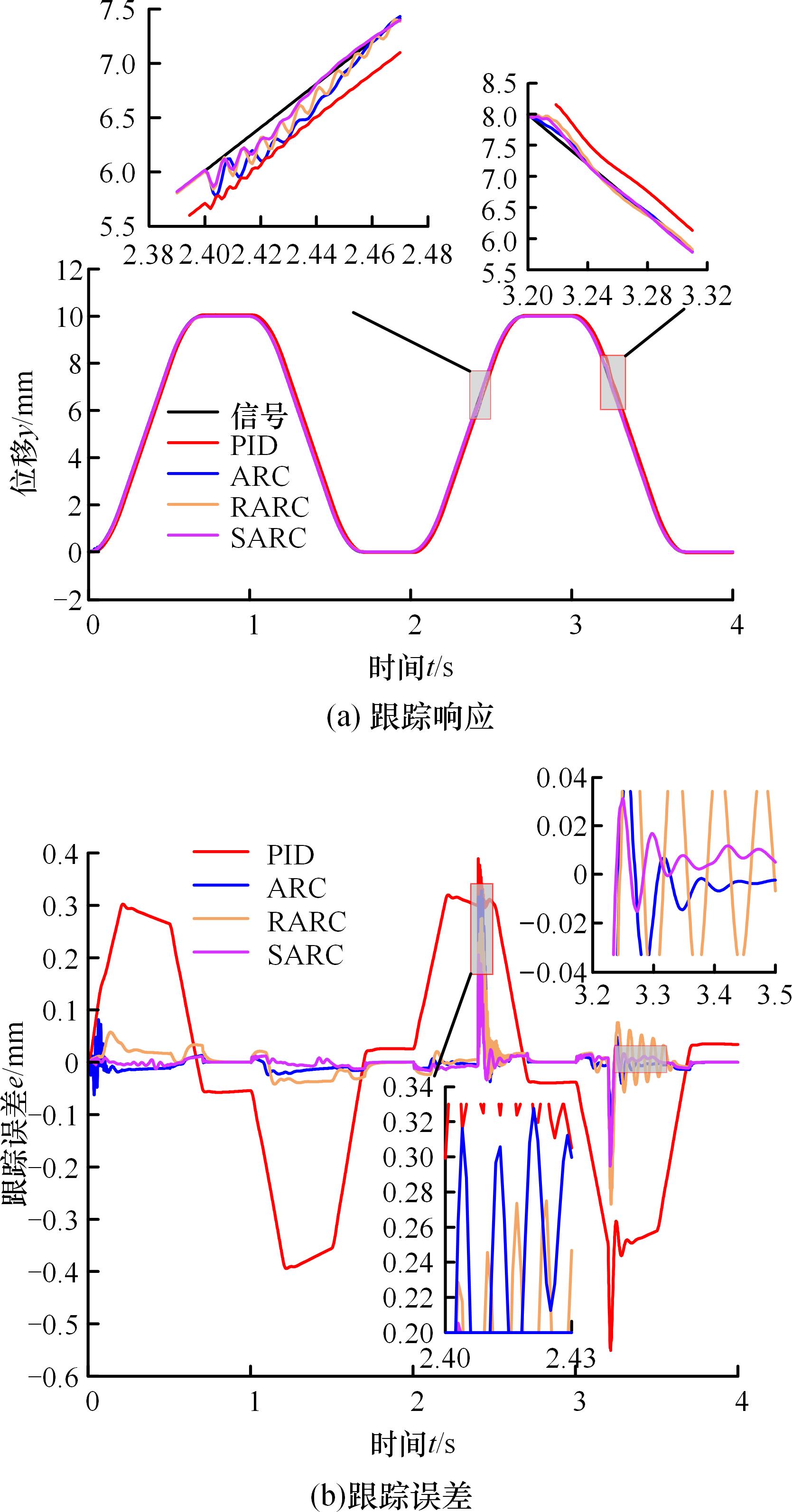
图10 不同控制策略在扰动工况W6下的响应与误差
Fig.10 Responses and tracking errors of the disturbance condition (W6) for various control strategies
| 工况/控制策略 | PID | ARC | RBF-ARC | SAC-ARC |
|---|---|---|---|---|
| W1 | 705.4 | 41.4 | 57.2 | 24.6 |
| W2 | 702.7 | 44.1 | 60.8 | 24.9 |
| W3 | 706.5 | 42.8 | 64.9 | 19.6 |
| W4 | 702.4 | 51.2 | 73.5 | 24.0 |
| W5 | 707.3 | 35.8 | 68.6 | 22.8 |
| W6 | 705.8 | 44.4 | 73.1 | 27.7 |
表5 不同控制策略在各种扰动工况下的IAE值
Tab.5 IAE values of the stair-step signal input under different disturbance conditions for various control strategies
| 工况/控制策略 | PID | ARC | RBF-ARC | SAC-ARC |
|---|---|---|---|---|
| W1 | 705.4 | 41.4 | 57.2 | 24.6 |
| W2 | 702.7 | 44.1 | 60.8 | 24.9 |
| W3 | 706.5 | 42.8 | 64.9 | 19.6 |
| W4 | 702.4 | 51.2 | 73.5 | 24.0 |
| W5 | 707.3 | 35.8 | 68.6 | 22.8 |
| W6 | 705.8 | 44.4 | 73.1 | 27.7 |
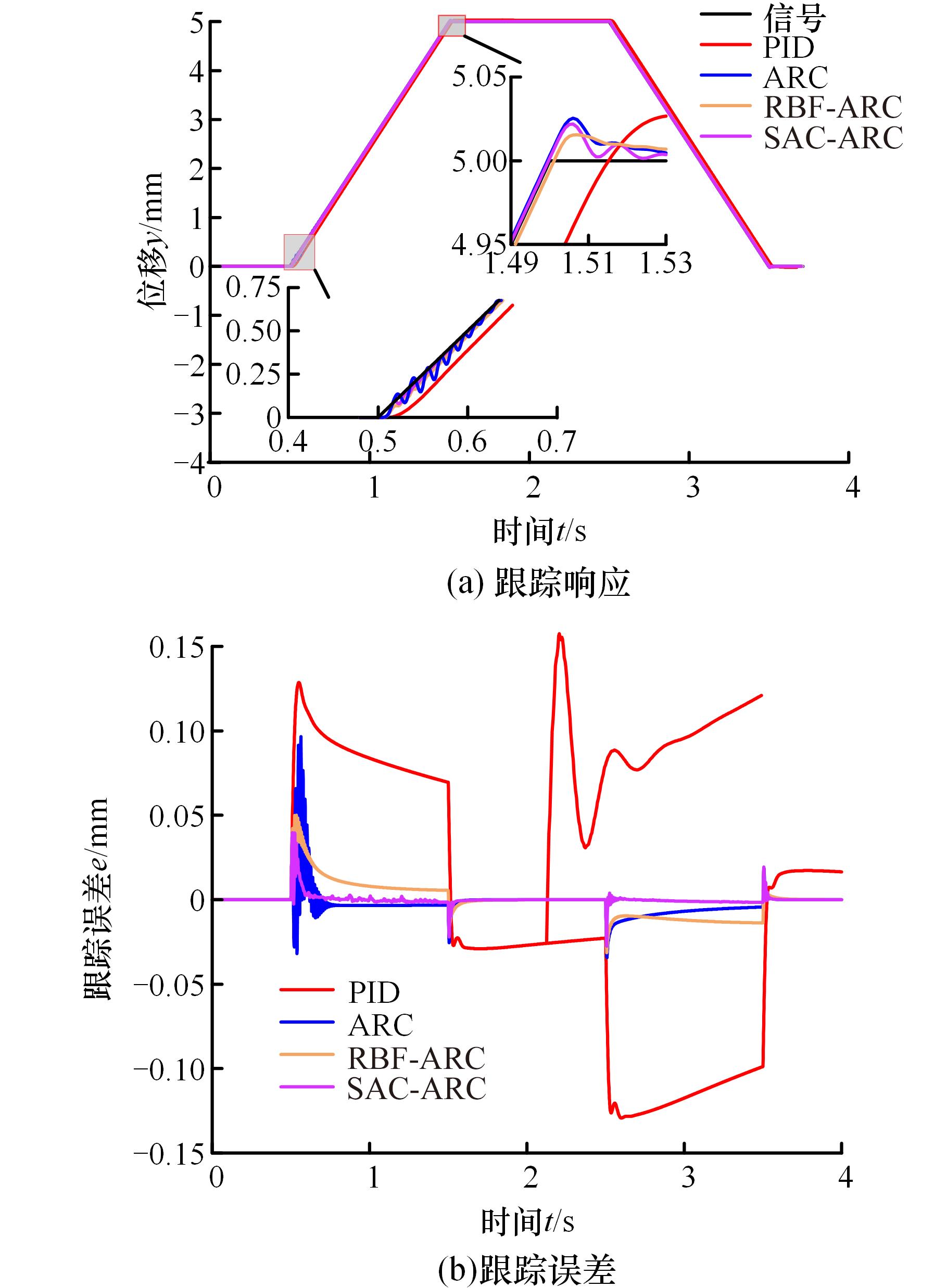
图11 不同控制策略在跟踪复合斜坡信号1时的响应与误差
Fig.11 Responses and tracking errors of composite ramp signal 1 for various control strategies
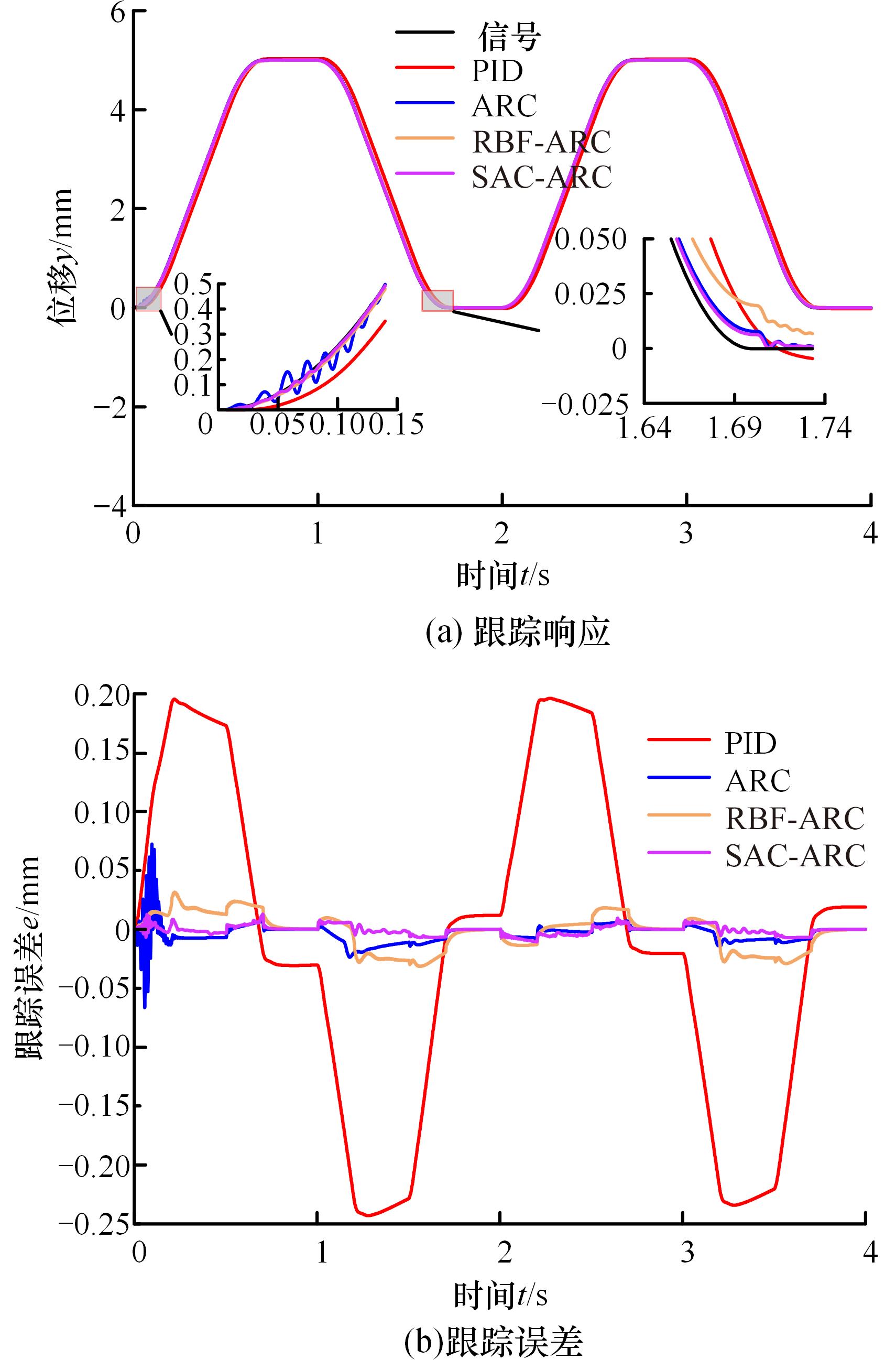
图12 不同控制策略在跟踪阶梯信号1时的响应与误差
Fig.12 Responses and tracking errors of stair-step signal 1 input for various control strategies
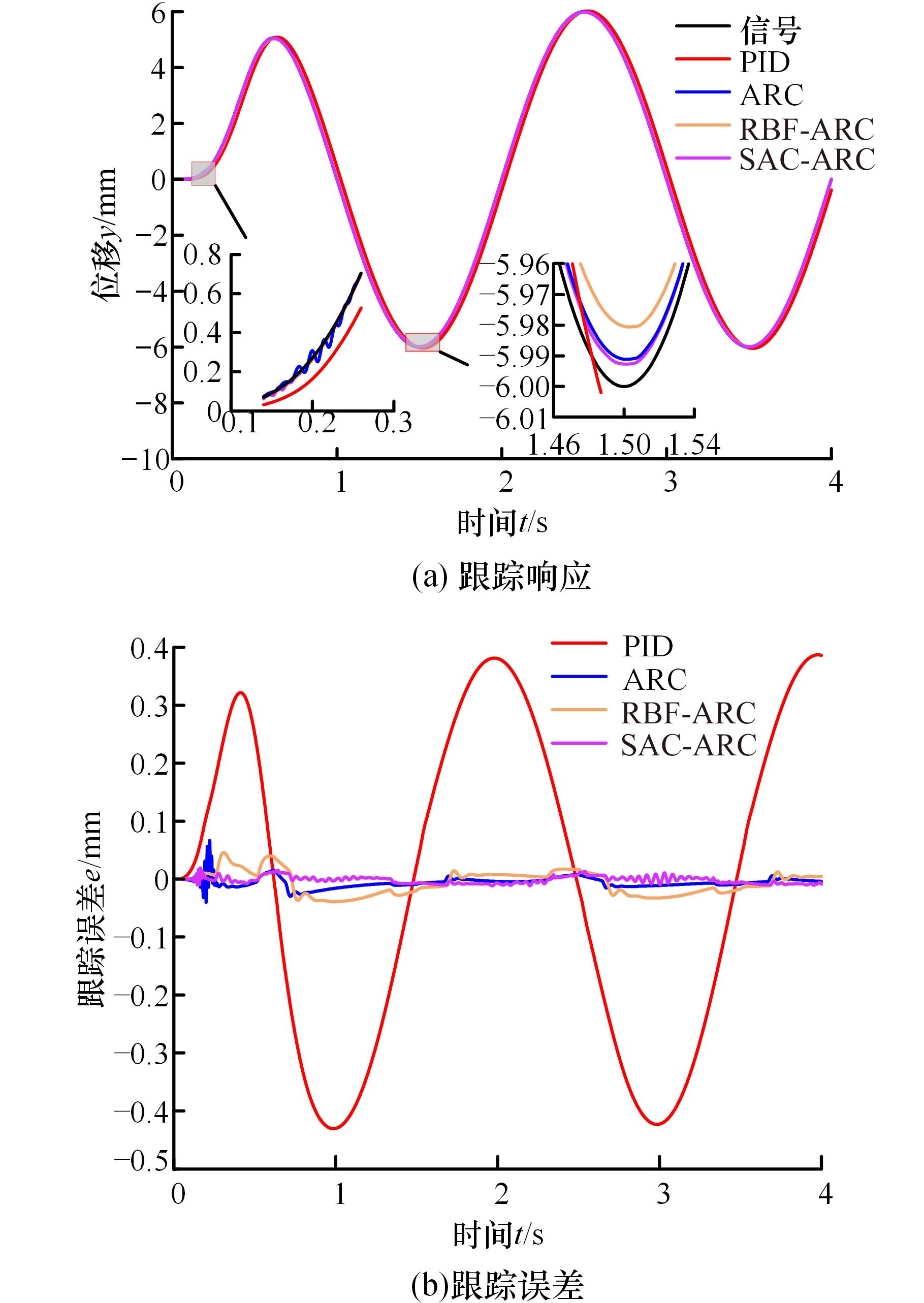
图13 不同控制策略在跟踪时变正弦信号1时的响应与误差
Fig.13 Responses and tracking errors of the time-varying sinusoidal signals input for various control strategies
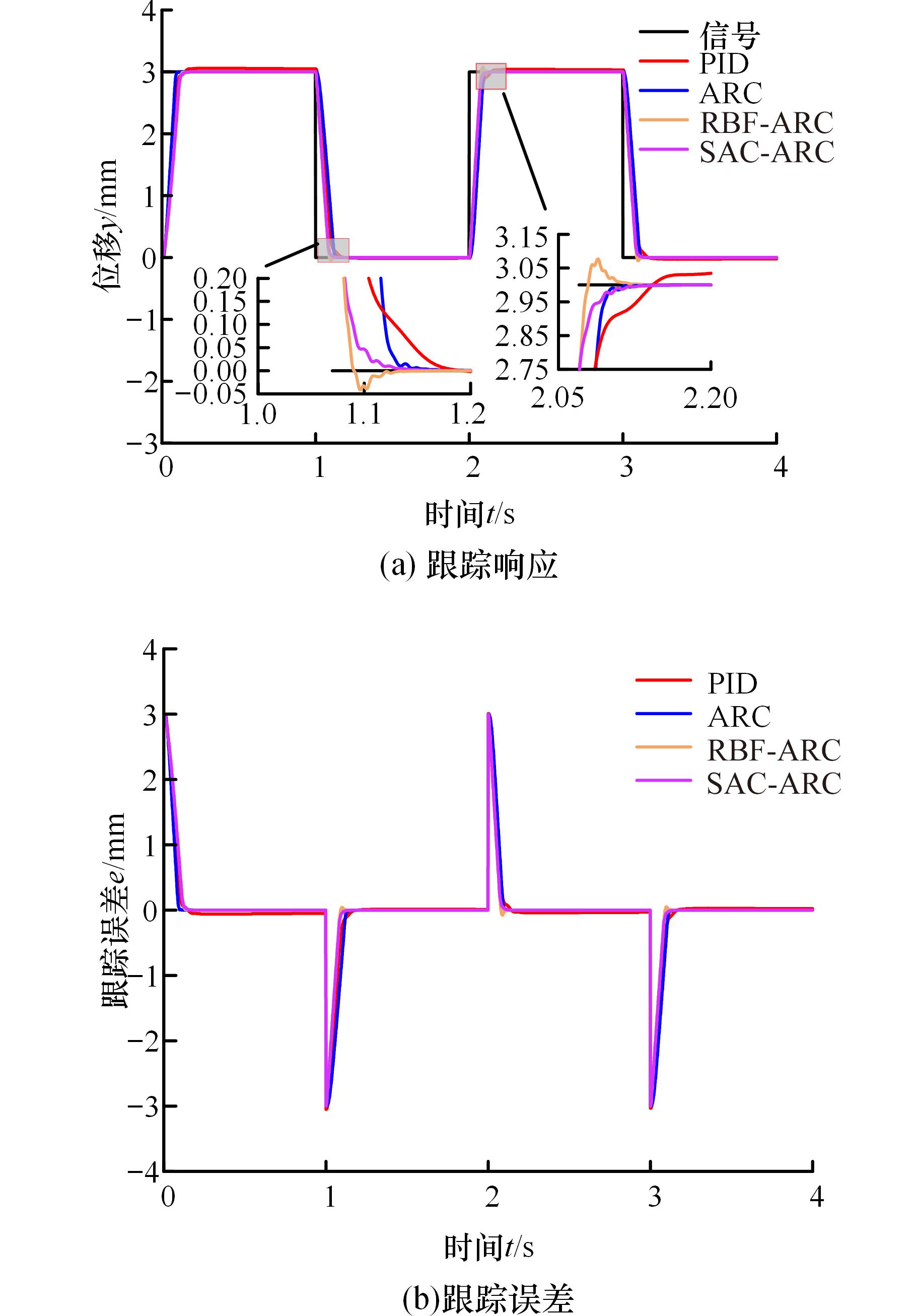
图14 不同控制策略在跟踪方波信号1时的响应与误差
Fig.14 Responses and tracking errors of square signals input for various control methods
| 输入信号 | 控制策略 | 信号1 | 信号2 |
|---|---|---|---|
| 复合斜坡信号 | PID | 235.7 | 373.7 |
| ARC | 15.8 | 17.7 | |
| RBF-ARC | 25.2 | 31.0 | |
| SAC-ARC | 4.1 | 8.8 | |
| 阶梯信号 | PID | 445.3 | 888.7 |
| ARC | 23.5 | 31.6 | |
| RBF-ARC | 48.1 | 61.1 | |
| SAC-ARC | 12.2 | 19.7 | |
| 时变正弦信号 | PID | 937.6 | 983.2 |
| ARC | 38.9 | 32.9 | |
| RBF-ARC | 85.6 | 72.4 | |
| SAC-ARC | 24.7 | 21.3 | |
| 方波信号 | PID | 803.6 | 1954.5 |
| ARC | 742.8 | 1776.6 | |
| RBF-ARC | 615.4 | 1589.6 | |
| SAC-ARC | 609.9 | 1570.5 |
表6 不同控制策略在跟踪不同输入信号时的IAE值
Tab 6 The IAE value of the different signal inputs for various control strategies
| 输入信号 | 控制策略 | 信号1 | 信号2 |
|---|---|---|---|
| 复合斜坡信号 | PID | 235.7 | 373.7 |
| ARC | 15.8 | 17.7 | |
| RBF-ARC | 25.2 | 31.0 | |
| SAC-ARC | 4.1 | 8.8 | |
| 阶梯信号 | PID | 445.3 | 888.7 |
| ARC | 23.5 | 31.6 | |
| RBF-ARC | 48.1 | 61.1 | |
| SAC-ARC | 12.2 | 19.7 | |
| 时变正弦信号 | PID | 937.6 | 983.2 |
| ARC | 38.9 | 32.9 | |
| RBF-ARC | 85.6 | 72.4 | |
| SAC-ARC | 24.7 | 21.3 | |
| 方波信号 | PID | 803.6 | 1954.5 |
| ARC | 742.8 | 1776.6 | |
| RBF-ARC | 615.4 | 1589.6 | |
| SAC-ARC | 609.9 | 1570.5 |
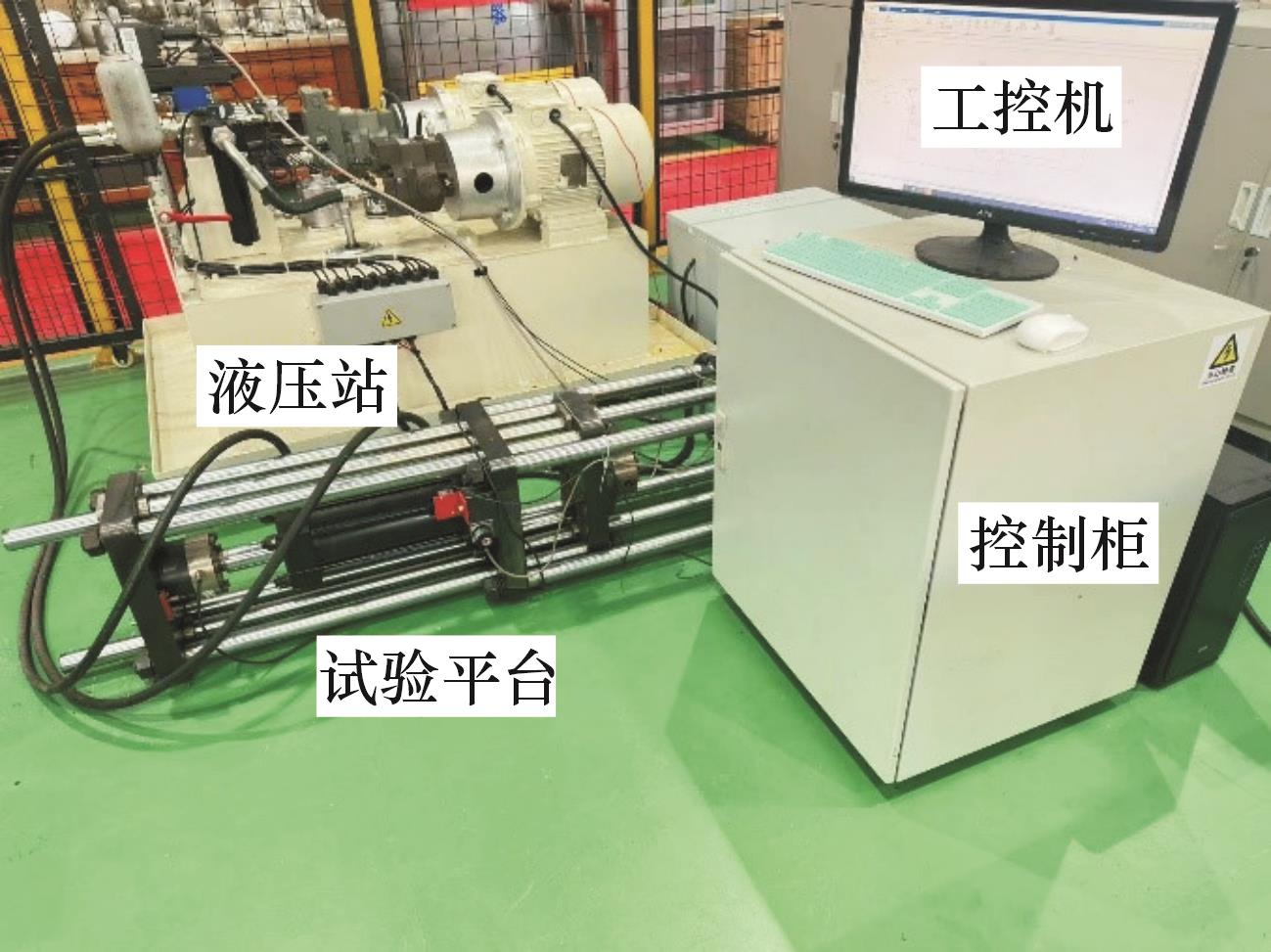
图15 异构双阀协调控制系统实验平台
Fig.15 The experimental platform of heterogeneous dual-valve control system
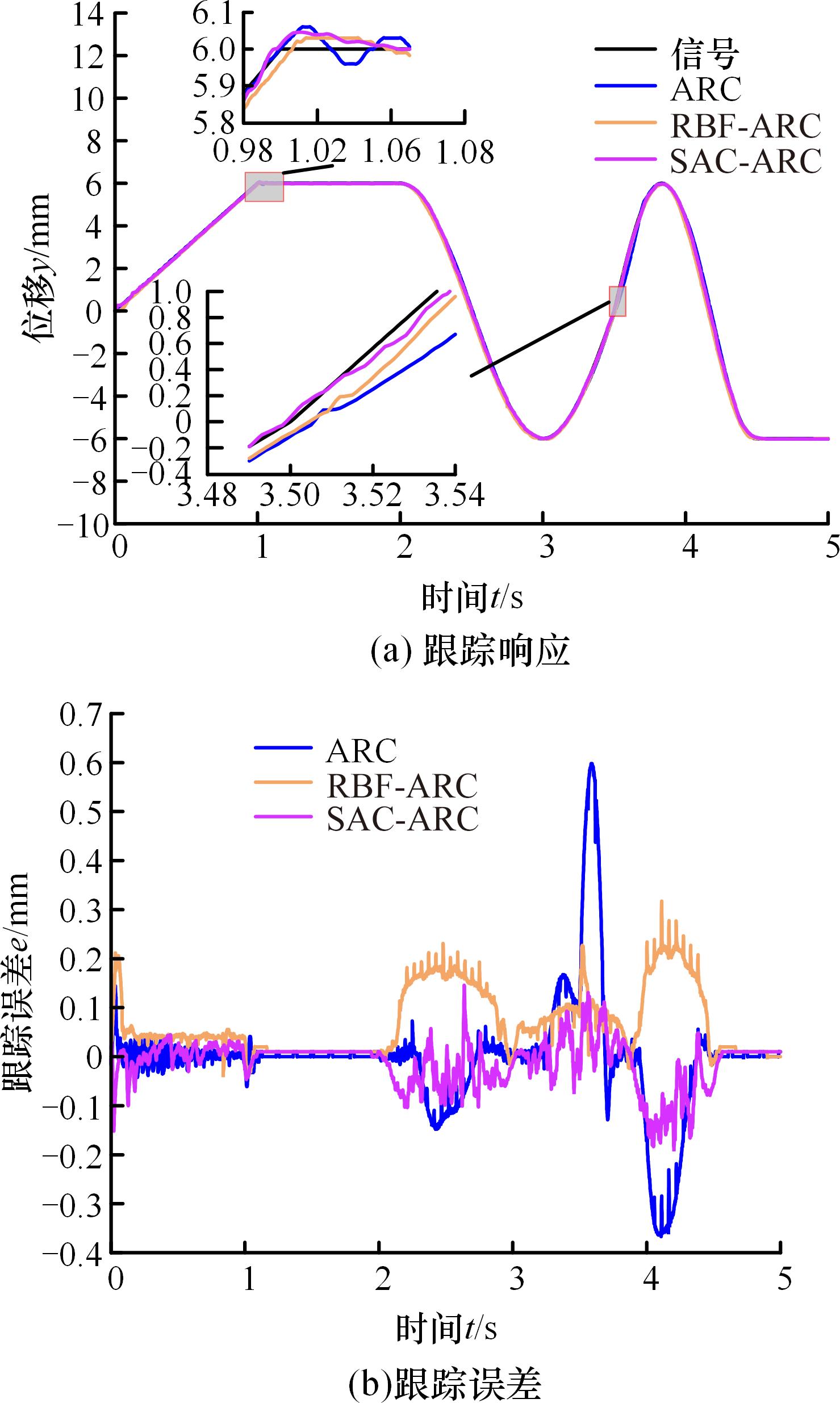
图16 不同控制策略在跟踪复合信号S0时的响应与误差
Fig.16 Responses and tracking errors of composite signal S0 input for various control strategies
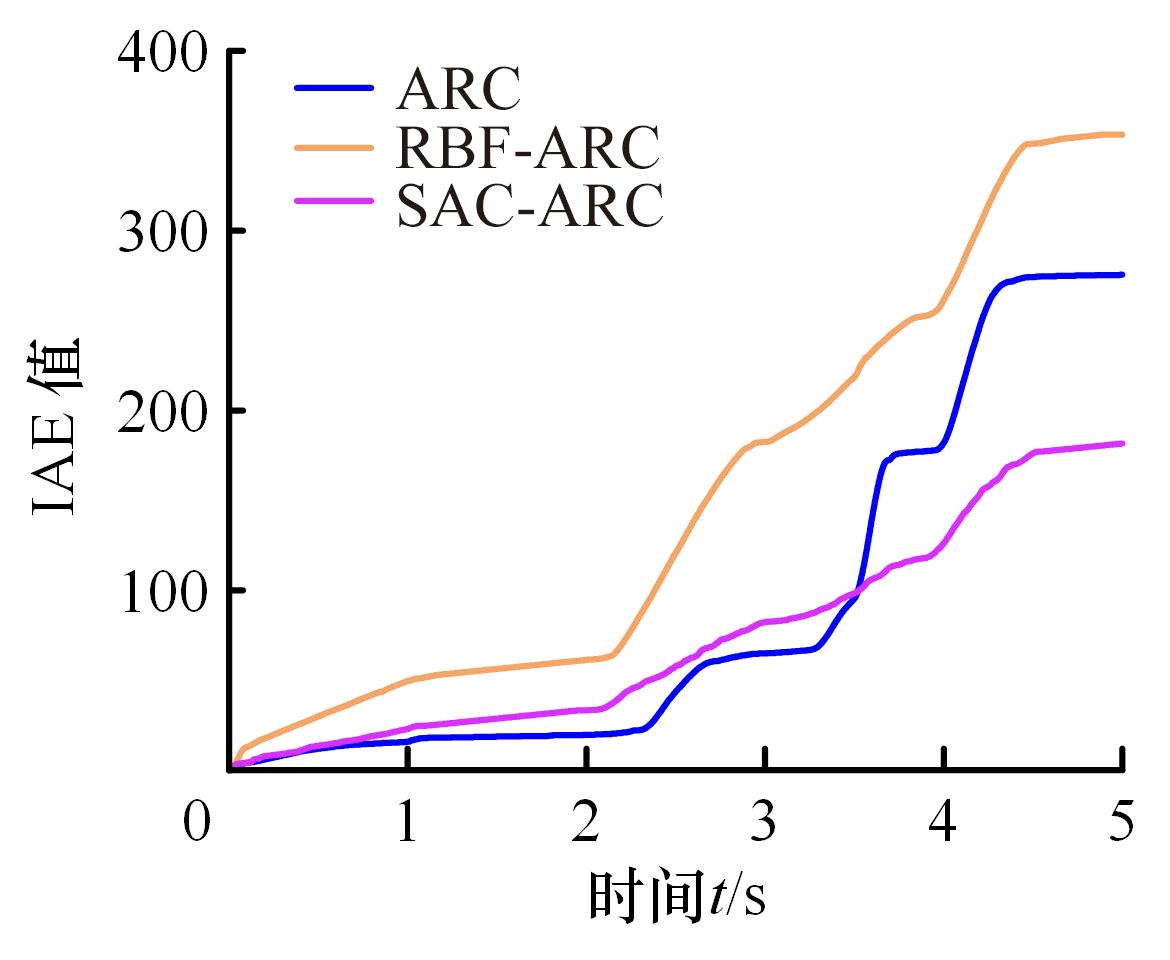
图17 不同控制策略在跟踪复合信号S0时的IAE值
Fig.17 The IAE value of composite signal S0 input for various control strategies
| [1] | 苏世杰, 程泳钦, 胡毅, 等.基于强化学习自适应鲁棒控制的异构双阀协调控制策略研究[J]. 中国机械工程,2025, 36(10): 2335-2342. |
| SU Shijie, CHENG Yongqin, HU Yi, et al. Coordination Control of Dual-Valve Electrohydraulic Servo Systems Based on Integration of Reinforcement Learning and Adaptive Robust Control[J]. China Mechanical Engineering, 2025, 36(10): 2335-2342. | |
| [2] | Litong LYU, CHEN Zheng, YAO Bin, et al. Development of Parallel-connected Pump-valve-coordinated Control Unit with Improved Performance and Efficiency[J]. Mechatronics, 2020, 70: 102419. |
| [3] | LIU Yi, WANG Tao, GONG Guofang, et al. Present Status and Prospect of High-frequency Electro-hydraulic Vibration Control Technology[J]. Chinese Journal of Mechanical Engineering, 2019, 32(1): 93. |
| [4] | QUAN Zhongyi, QUAN Long, ZHANG Jinman. Review of Energy Efficient Direct Pump Controlled Cylinder Electro-hydraulic Technology[J]. Renewable and Sustainable Energy Reviews, 2014, 35: 336-346. |
| [5] | YU Huan, CHEN Ying, SHI Wenzhao, et al. State Constrained Variable Structure Control for Active Heave Compensators[J]. IEEE Access, 2019, 7: 54770-54779. |
| [6] | XU Bing, DING Ruqi, ZHANG Junhui, et al. Modeling and Dynamic Characteristics Analysis on a Three-stage fast-response and Large-flow Directional Valve[J]. Energy Conversion and Management, 2014, 79: 187-199. |
| [7] | YU Shaojuan, SONG Junjun. Iterative Learning Control of Double Servo Valve Controlled Electro Hydraulic Servo System[C]∥2011 Seventh International Conference on Computational Intelligence and Security. IEEE, 2011: 278-282. |
| [8] | HE Jianhui, SU Shijie, WANG Hairong, et al. Online PID Tuning Strategy for Hydraulic Servo Control Systems via SAC-based Deep Reinforcement Learning[J]. Machines, 2023, 11(6): 593. |
| [9] | 姚静,寇成浩,尹钰鑫, 等. 超高压大流量比例插装阀测试方法[J]. 中国机械工程, 2020, 31(6): 638-646. |
| YAO Jing, KOU Chenghao, YIN Yuxin, et al. Test Methods of Ultra-high Pressure and Large Flow Proportional Cartridge Valves[J]. China Mechanical Engineering,2020, 31(6): 638-646. | |
| [10] | BAI Yanhong, QUAN Long. Improving electro-hydraulic System Performance by double-valve Actuation[J]. Transactions of the Canadian Society for Mechanical Engineering, 2016, 40(3): 289-301. |
| [11] | SU Shijie, XUE Ting, CHEN Yun, et al. Harmonic Control of a Dual-valve Hydraulic Servo System with Dynamically Allocated Flows[J]. Asian Journal of Control, 2023, 25(3): 1939-1956. |
| [12] | WANG Tianzhu, ZHANG Qiang, FANG Jinhui, et al. Active Fault-tolerant Control for the Dual-valve Hydraulic System with Unknown Dead-zone[J]. ISA Transactions, 2024, 145: 399-411. |
| [13] | SU Shijie, ZHU Yuanyuan, LI Cunjun, et al. Dual-valve Parallel Prediction Control for an Electro-hydraulic Servo System[J]. Science Progress, 2020, 103(1): 0036850419875662. |
| [14] | WANG Bowen. Research on Nonlinear Calibration of Mine Catalytic-combustion-based Combustible-gas Sensor Based on RBF Neural Network[J]. Heliyon, 2023, 9(3): e14055. |
| [15] | 陈志勇,李攀,叶明旭,等.自动驾驶电动车辆基于参数预测的径向基函数神经网络自适应控制[J].中国机械工程,2024,35(6):982-992. |
| CHEN Zhiyong, LI Pan, YE Mingxu, et al. RBF Neural Network Adaptive Control Based on Parameter Prediction for Self-driving Electric Vehicles[J]. China Mechanical Engineering,2024,35(6):982-992. |
| [1] | 苏世杰, 程泳钦, 胡毅, 何建辉, 杨书吉. 基于强化学习自适应鲁棒控制的异构双阀协调控制策略研究[J]. 中国机械工程, 2025, 36(10): 2335-2342. |
| [2] | 成艾国1, 王超1, 陆日进2, 何智成1, 于万元3. 复合材料尾门结构的拓扑参数一体化轻量化设计[J]. 中国机械工程, 2024, 35(10): 1824-1833. |
| [3] | 周国强, 王慧, 宋宇宁, 赵国超, . 液压支架双级安全阀设计及其快速动载冲击试验研究[J]. 中国机械工程, 2023, 34(18): 2194-2203. |
| [4] | 陈浩, 巩明德, 赵丁选, 张伟, 张悦, 郝春友, . 电液主动悬架灵敏度分析与自适应跟踪控制[J]. 中国机械工程, 2023, 34(04): 481-489. |
| [5] | 杭旸, 闫康昊, 黄丹. 计入柱塞套弹性变形的柱塞副摩擦与密封特性分析[J]. 中国机械工程, 2023, 34(01): 17-26. |
| [6] | 董振乐, 杨英浩, 姚建勇, 张政, 李阁强, 王帅. 匹配和不匹配干扰共存时电液伺服系统预设性能渐近跟踪控制[J]. 中国机械工程, 2022, 33(20): 2437-2443. |
| [7] | 汪飞雪1,2;姚静1;胡福泰1,2;郑永江1,2;臧新良1,2. 锻造液压机振动特性机液联合仿真[J]. 中国机械工程, 2020, 31(10): 1175-1182,1189. |
| [8] | 段炼;袁侠义;张岩;朱亮;江亮. 基于实车状态的发动机均值模型研究[J]. 中国机械工程, 2020, 31(09): 1123-1130. |
| [9] | 陈梓铭1,2;薛志刚1,2;张松3;李落星1,2. 基于ADAMS与Simulink联合仿真的滑移门关闭能量分析[J]. 中国机械工程, 2020, 31(08): 924-930. |
| [10] | 孙明翰;许哲;郑立康;许志强;杜凤山. 基于改进型粒子群优化算法的双辊薄带振动铸轧压下控制系统优化[J]. 中国机械工程, 2020, 31(03): 360-366. |
| [11] | 邱少林;钱立军;陆建辉. 基于场景驱动与分层规划的自主代客泊车系统研究[J]. 中国机械工程, 2019, 30(19): 2364-2371. |
| [12] | 张志刚;余晓霞;郑燕杰;李腾. 同步器摩擦特性建模仿真与试验[J]. 中国机械工程, 2019, 30(07): 825-831. |
| [13] | 唐友名1;娄渊博1,2;陈基2;李志红1;陈义2;黄秋萍2;袁志群1. SUV发动机舱热管理一维/三维联合仿真与改进[J]. 中国机械工程, 2019, 30(05): 608-614,629. |
| [14] | 黄康;潘毅;赵萍. 汽车主动防侧倾系统建模与试验分析[J]. 中国机械工程, 2017, 28(22): 2701-2706,2731. |
| [15] | 钱东海;黄友昕;董小康;吴鹏. 基于快速终端滑模算法的机械手跟踪控制研究[J]. 中国机械工程, 2017, 28(18): 2237-2241. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||