


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (1): 114-125.DOI: 10.3969/j.issn.1004-132X.2026.01.013
• 机械基础工程 • 上一篇
朱潇( ), 沈惠平(), 李菊, 李涛, 叶鹏达, 朱伟
), 沈惠平(), 李菊, 李涛, 叶鹏达, 朱伟
收稿日期:2024-09-28
出版日期:2026-01-25
发布日期:2026-02-05
通讯作者:
沈惠平
作者简介:朱潇,女,2001年生,硕士研究生。研究方向为并联机器人机构学。E-mail:18796167749@139.com基金资助:
ZHU Xiao(), SHEN Huiping(), LI Ju, LI Tao, YE Pengda, ZHU Wei
Received:2024-09-28
Online:2026-01-25
Published:2026-02-05
Contact:
SHEN Huiping
摘要:
根据基于方位特征方程的并联机构拓扑设计理论和方法,设计了一种通过轮换使用动平台产生两种输出运动的三自由度并联机构。分析计算了该机构在两种模式下的以下特性:包括方位特征、自由度和耦合度的拓扑特征;符号式位置正反解、工作空间和奇异性的运动学性能;驱动力变化的动力学性能。然后,以可达工作空间为目标对机构尺寸进行了优化设计。最后对该机构在自动包装物件生产的应用场景进行了概念设计。
中图分类号:
朱潇, 沈惠平, 李菊, 李涛, 叶鹏达, 朱伟. 可轮换用动平台三自由度并联机构的拓扑设计及其性能分析[J]. 中国机械工程, 2026, 37(1): 114-125.
ZHU Xiao, SHEN Huiping, LI Ju, LI Tao, YE Pengda, ZHU Wei. Topological Design and Performance Analysis of 3-DOF Parallel Mechanisms with Alternately Used Moving Platforms[J]. China Mechanical Engineering, 2026, 37(1): 114-125.
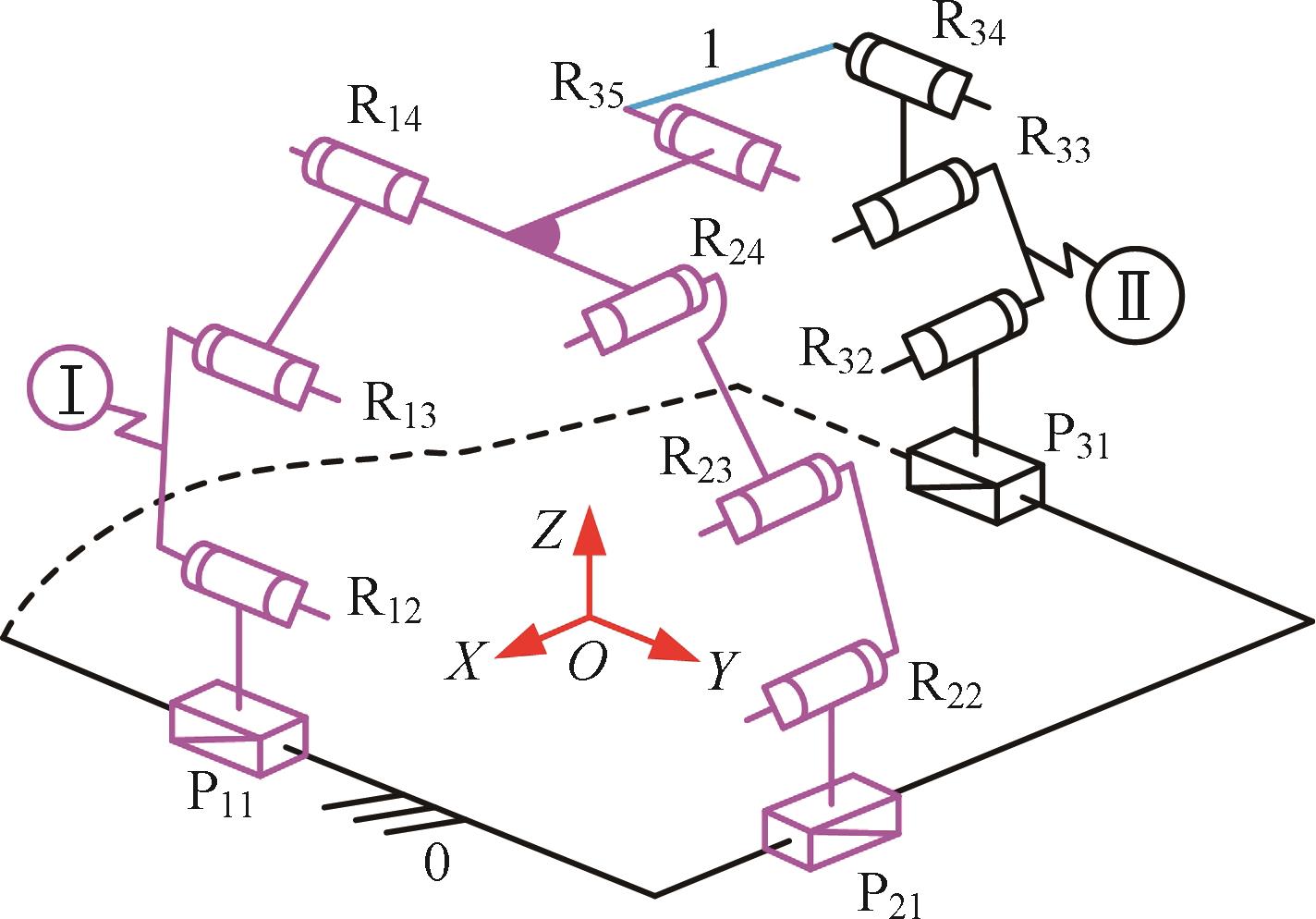
图1 3T1R输出模式下的并联机构简图
Fig.1 Schematic diagram of the PM in 3T1R output mode
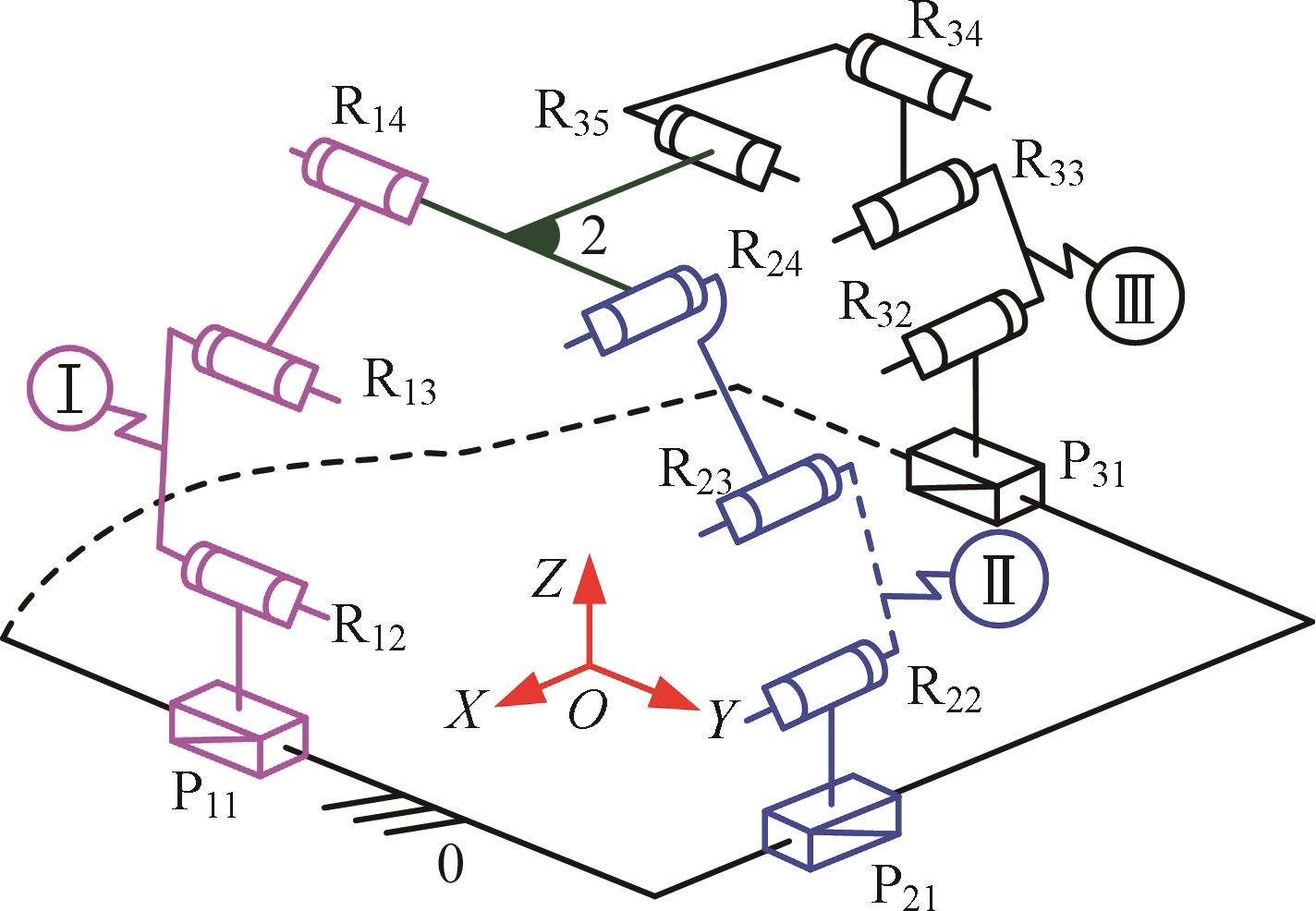
图2 3T输出模式下的并联机构简图
Fig.2 Schematic diagram of the PM in 3T output mode
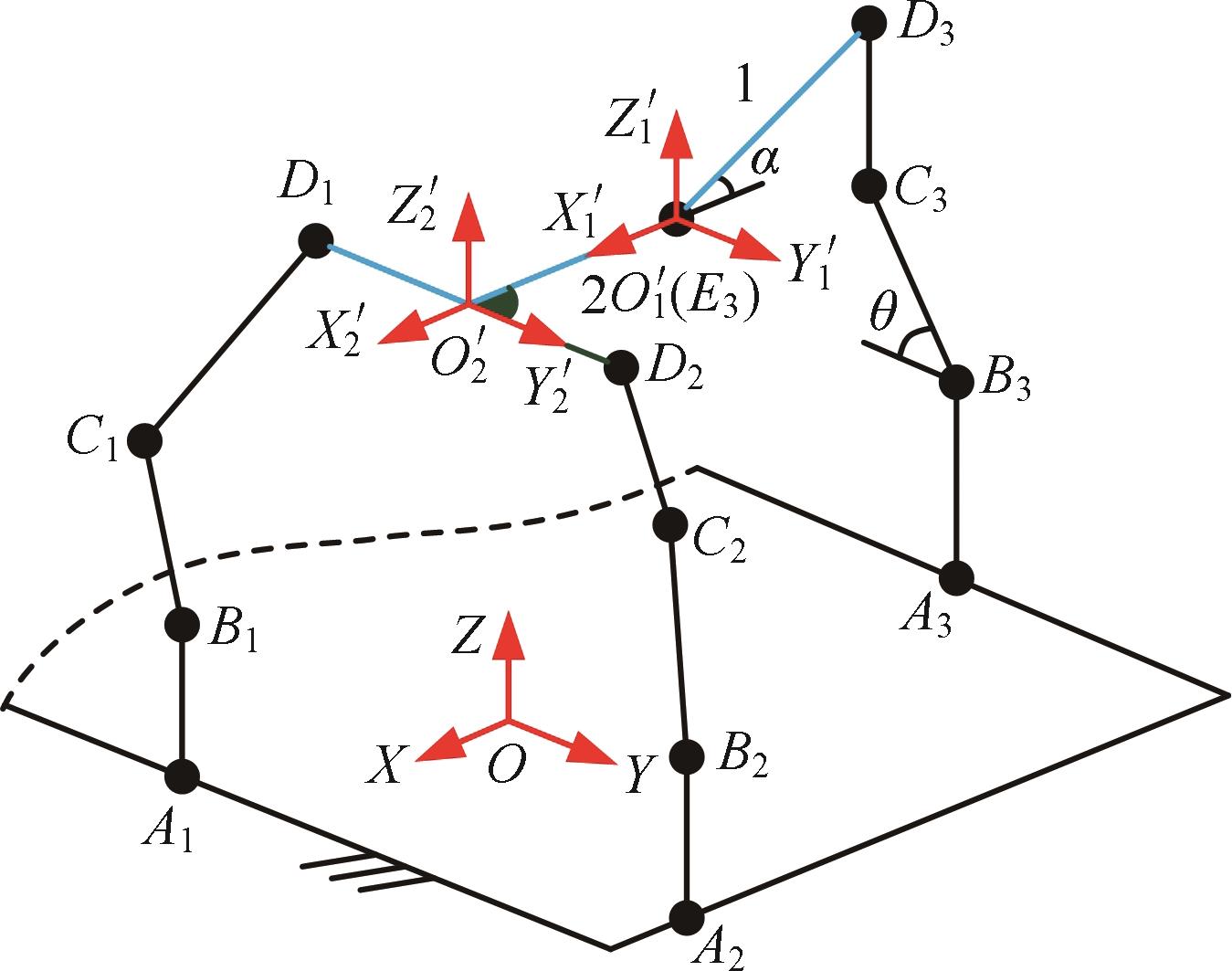
图3 3-DOF可轮换用并联机构的运动学建模
Fig.3 Kinematic modeling of 3-DOF APM-PM
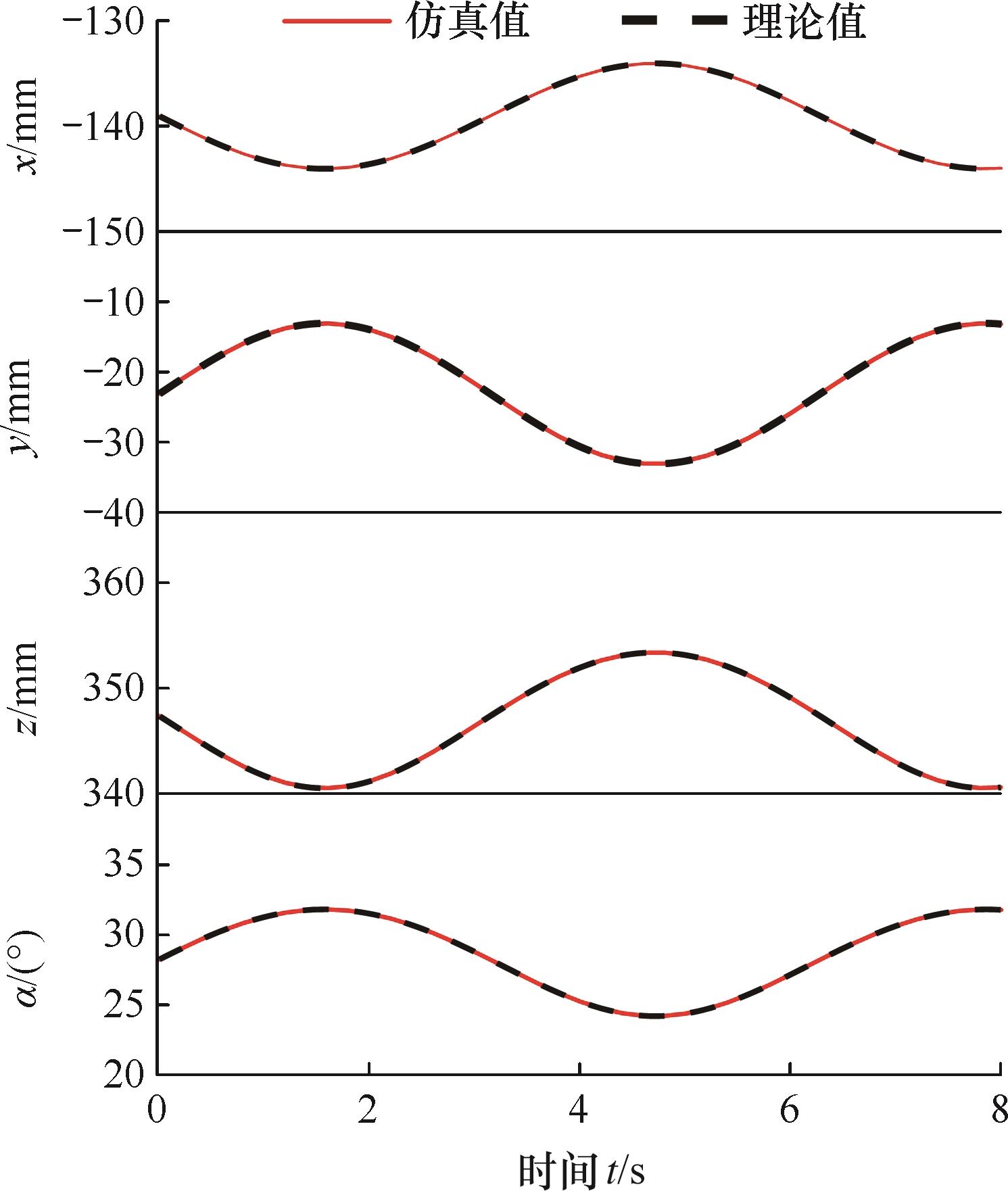
图4 3T1R模式下动平台1的位移曲线
Fig.4 Displacement curves of moving platform 1 in 3T1R mode

图5 3T模式下动平台2的位移曲线
Fig.5 Displacement curves of moving platform 2 in 3T mode
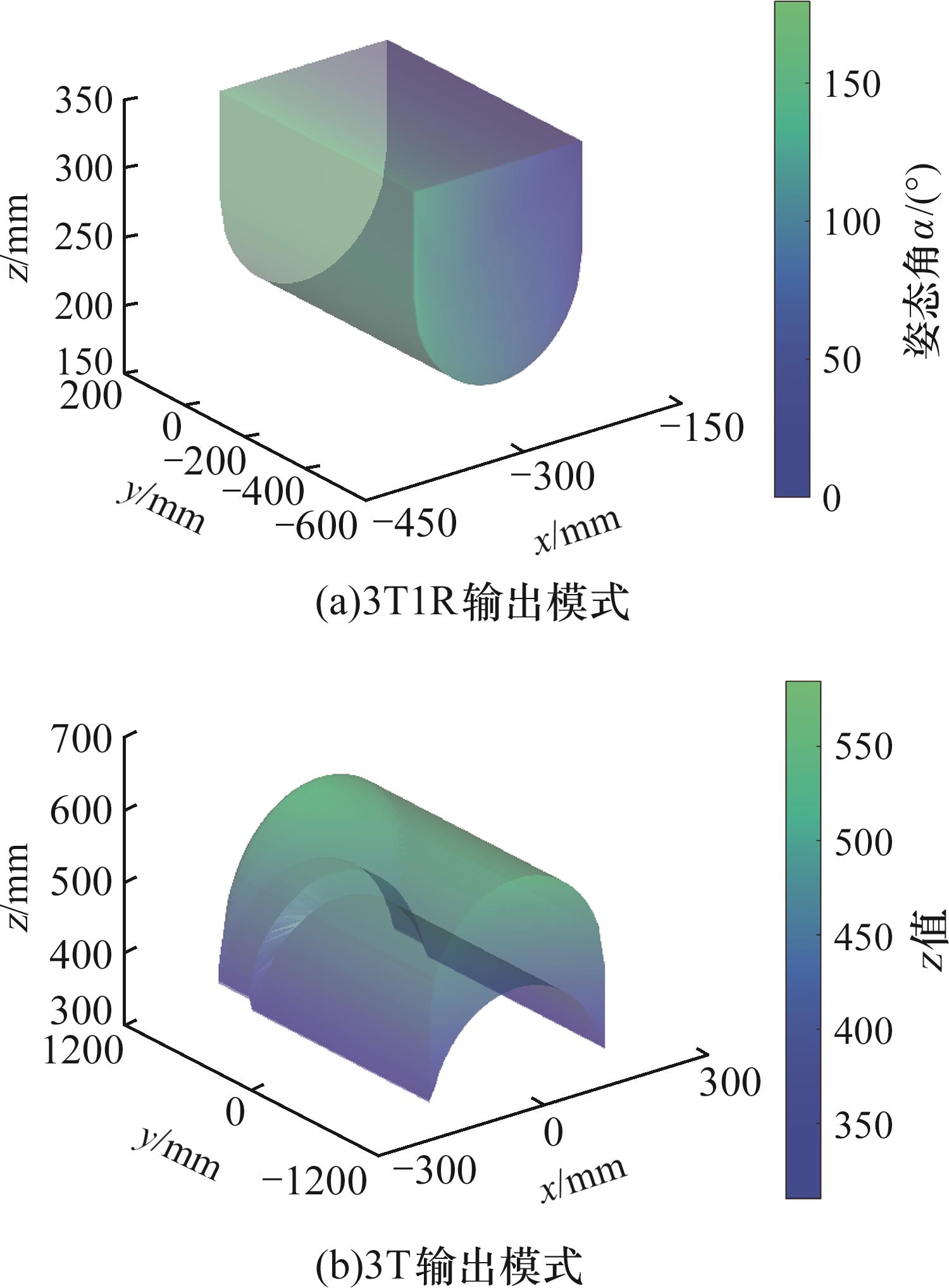
图6 动平台1、2质心处的三维工作空间
Fig.6 3D workspaces at the centroids of moving platforms 1 and 2
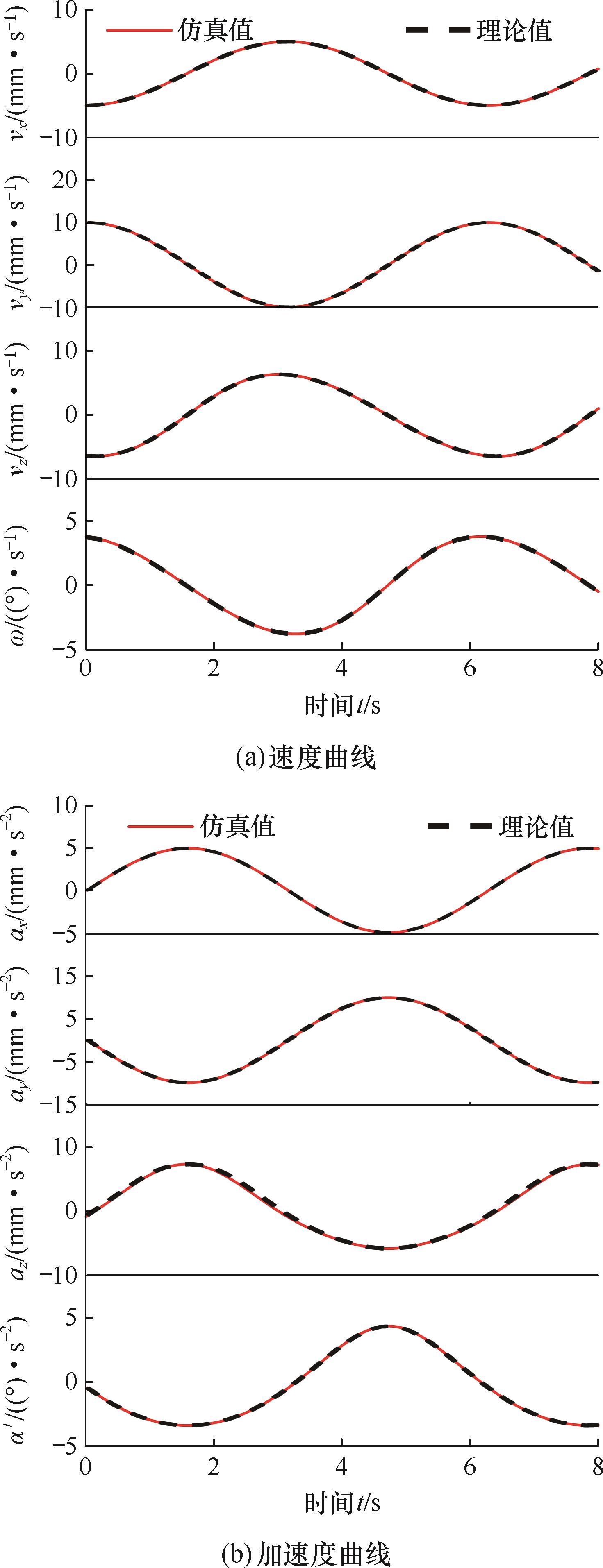
图7 双动平台基点的运动曲线
Fig.7 Motion curve of moving platform mode
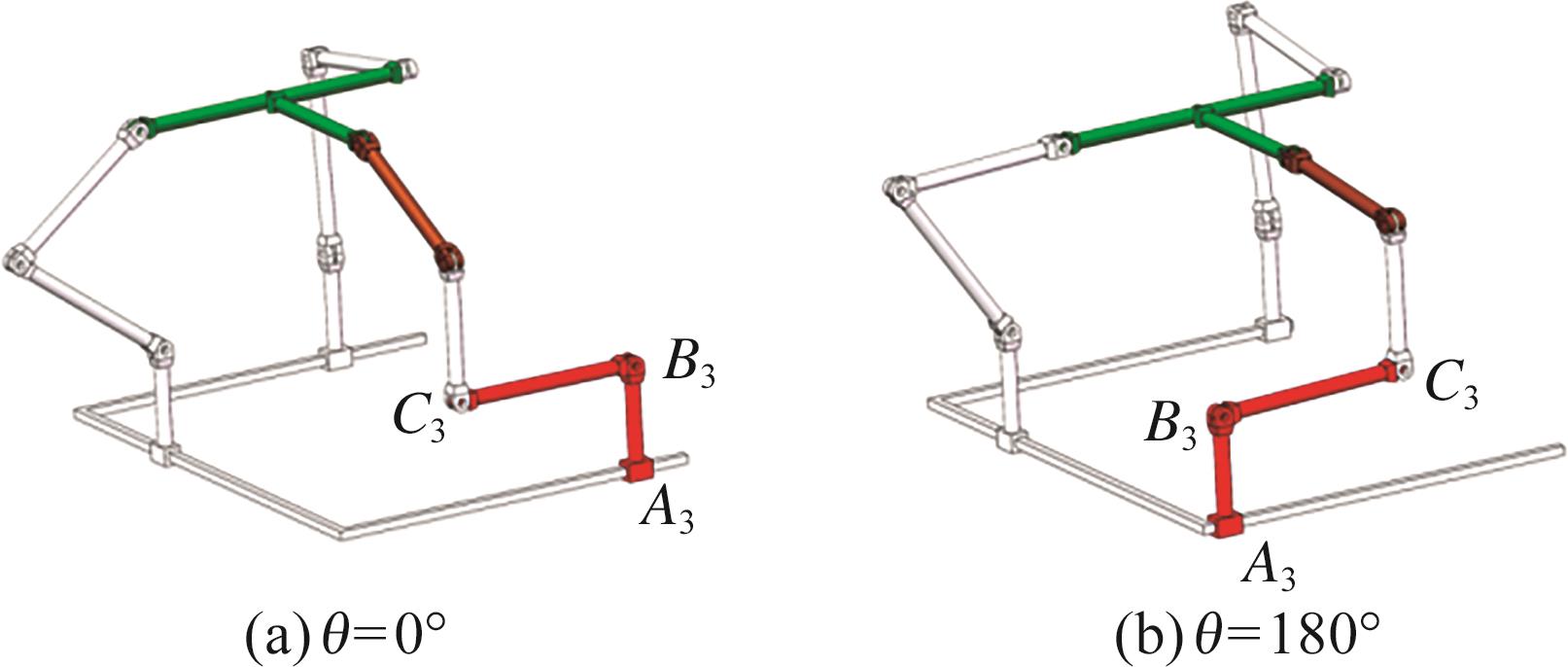
图8 输入奇异位置
Fig.8 Input singular position
| 名称 | IXX | IYY | IZZ |
|---|---|---|---|
| 杆件B1C1 | 185 518.3 | 314 549.1 | 261 395.8 |
| 杆件B2C2 | 257 012.5 | 169 818.5 | 196 233.8 |
| 杆件B3C3 | 100 552.4 | 271 593.9 | 171 441.8 |
| 杆件C1D1 | 448 544.8 | 527 994.4 | 261 925.3 |
| 杆件C2D2 | 481 678.6 | 424 287.5 | 207 711.1 |
| T型杆D1D2E3(动平台2) | 187 919.2 | 242 926.1 | 562 211.3 |
| 杆件E3D3(动平台1) | 226 360.8 | 270 871.4 | 484 048.2 |
表1 各杆件的转动惯量参数
Tab.1 Parameters of rotational inertia of each bar kg·mm2
| 名称 | IXX | IYY | IZZ |
|---|---|---|---|
| 杆件B1C1 | 185 518.3 | 314 549.1 | 261 395.8 |
| 杆件B2C2 | 257 012.5 | 169 818.5 | 196 233.8 |
| 杆件B3C3 | 100 552.4 | 271 593.9 | 171 441.8 |
| 杆件C1D1 | 448 544.8 | 527 994.4 | 261 925.3 |
| 杆件C2D2 | 481 678.6 | 424 287.5 | 207 711.1 |
| T型杆D1D2E3(动平台2) | 187 919.2 | 242 926.1 | 562 211.3 |
| 杆件E3D3(动平台1) | 226 360.8 | 270 871.4 | 484 048.2 |
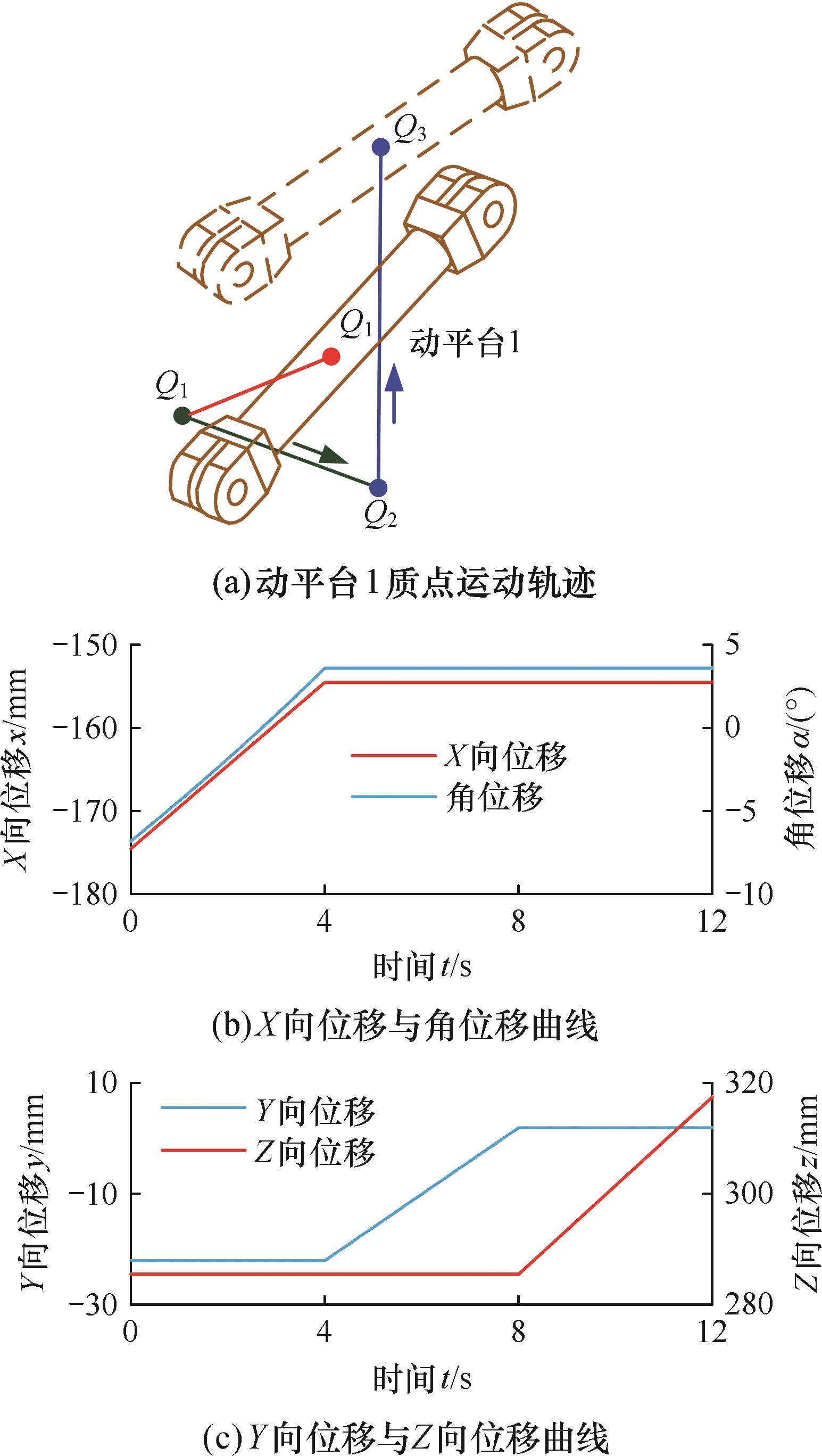
图9 3T1R模式下动平台1的运动轨迹与运动规律
Fig.9 The motion trajectory and law of moving platform 1 in 3T1R mode
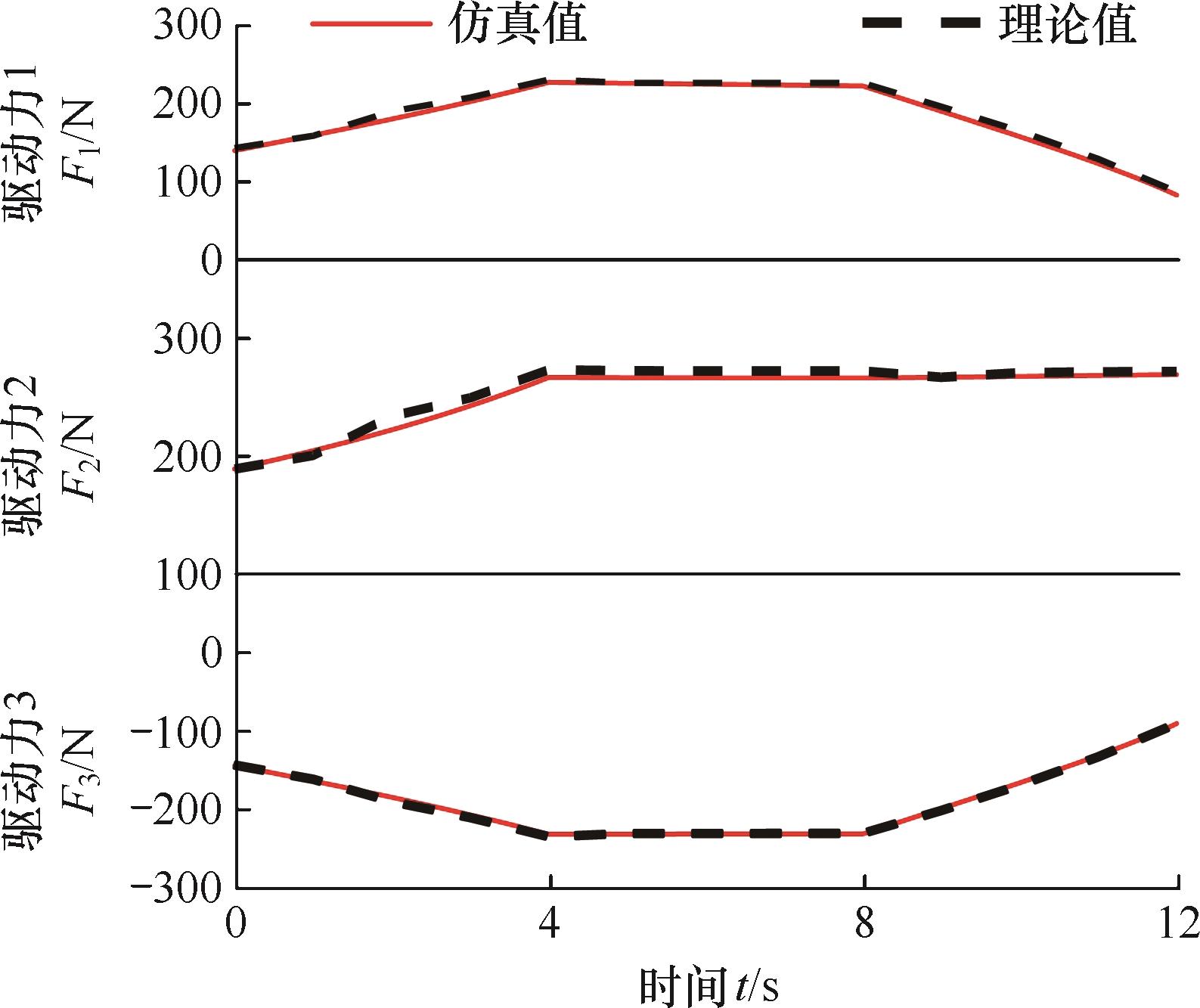
图10 3T1R模式下的驱动力曲线
Fig.10 Curves of driving force in 3T1R mode
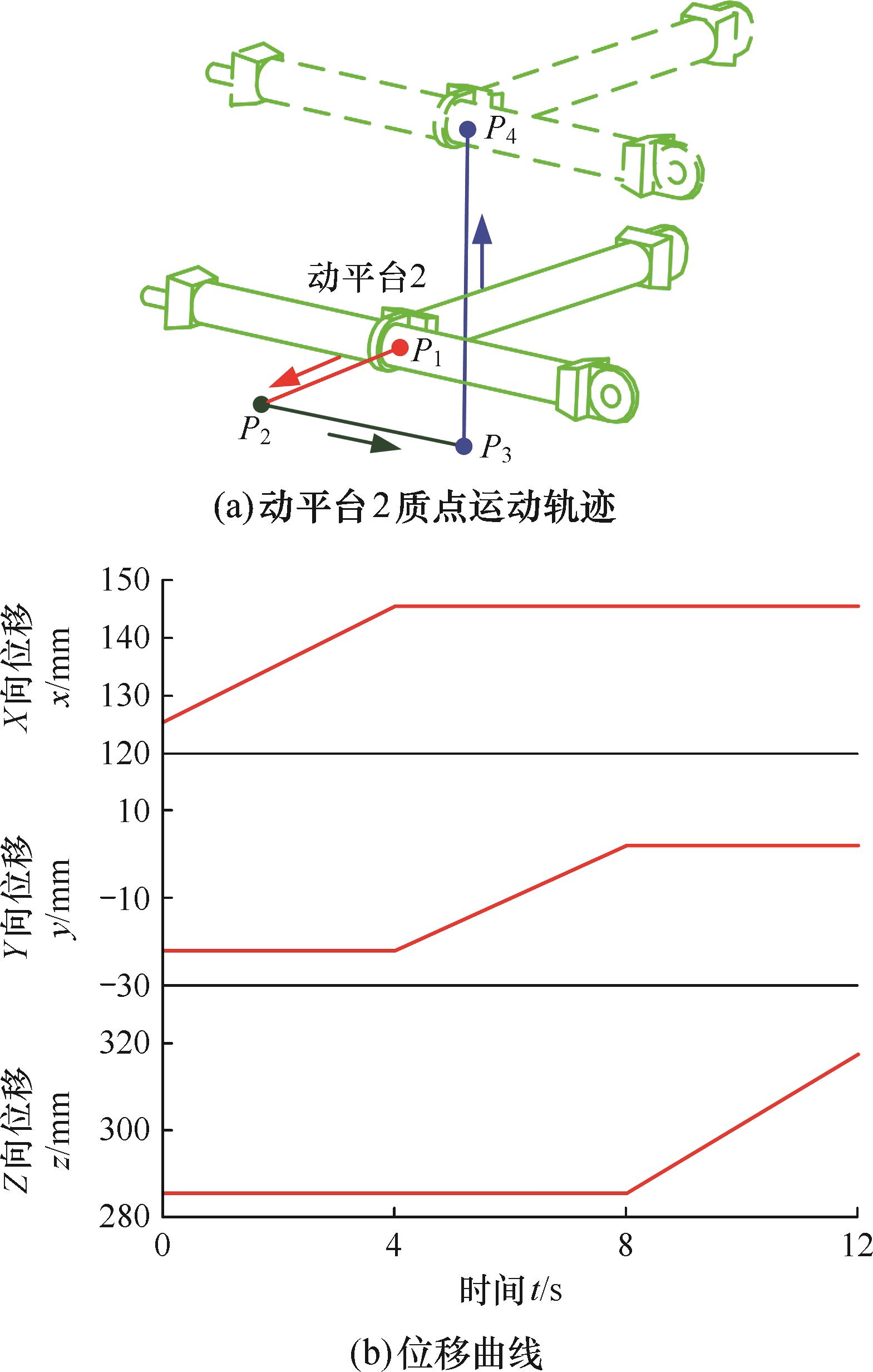
图11 3T模式下动平台2的运动轨迹与运动规律
Fig.11 The motion trajectory and law of moving platform 2 in 3T mode
| 设计变量 | 约束范围 | 设计变量 | 约束范围 |
|---|---|---|---|
| l1 | [70,170] | l6 | [110,210] |
| l4 | [130,230] | d | [102,152] |
| l5 | [75,175] | e | [250,350] |
表2 设计变量的约束范围 (mm)
Tab. 2 Constraint ranges for design variables
| 设计变量 | 约束范围 | 设计变量 | 约束范围 |
|---|---|---|---|
| l1 | [70,170] | l6 | [110,210] |
| l4 | [130,230] | d | [102,152] |
| l5 | [75,175] | e | [250,350] |
| 维度 | 随机数 | 迭代次数 | 缩放因子 | 交叉概率 |
|---|---|---|---|---|
| 7 | 100 | 20 | 0.5 | 0.9 |
表3 参数设置
Tab.3 Parameter settings
| 维度 | 随机数 | 迭代次数 | 缩放因子 | 交叉概率 |
|---|---|---|---|---|
| 7 | 100 | 20 | 0.5 | 0.9 |
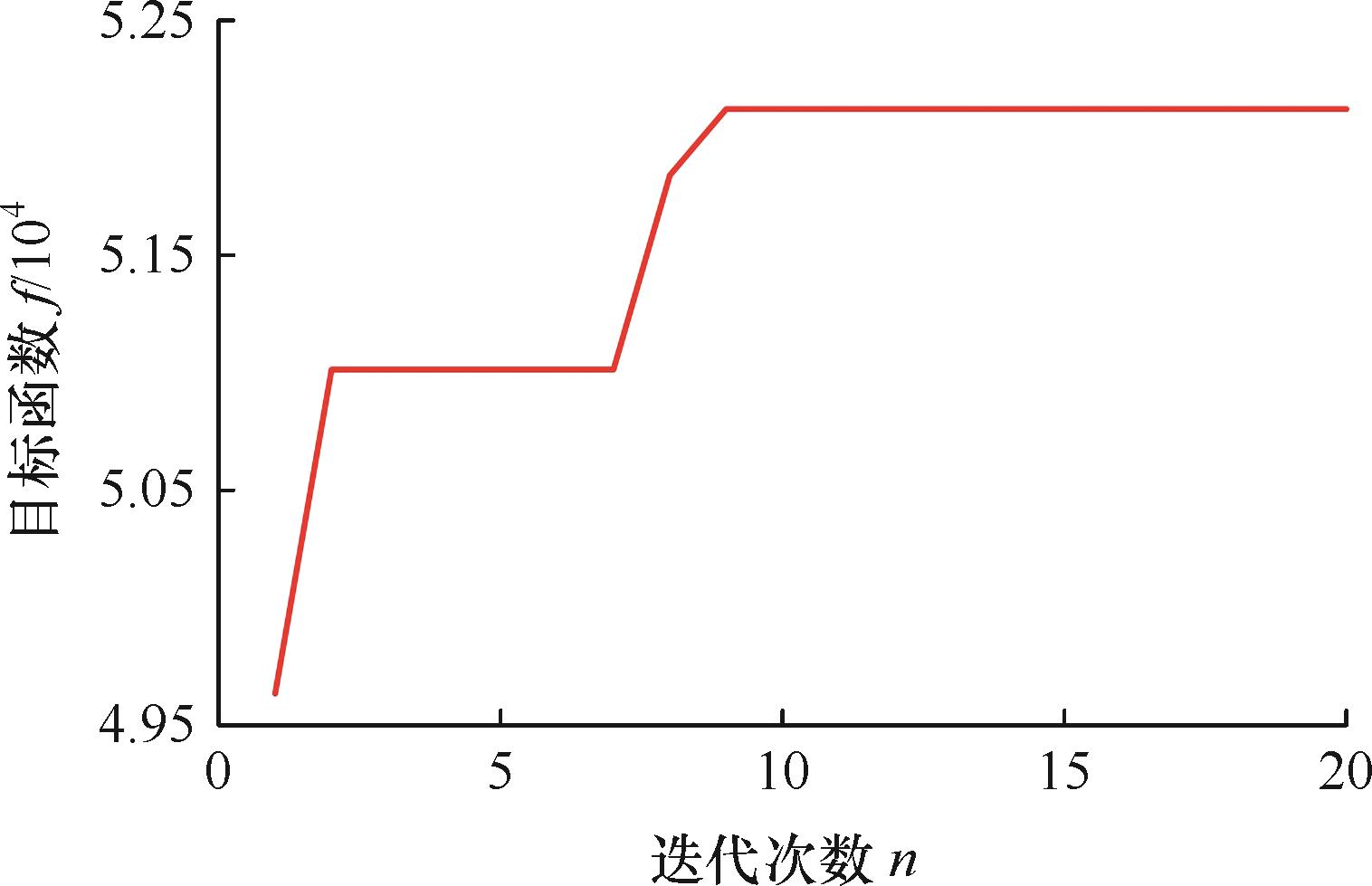
图12 目标函数随迭代次数变化曲线
Fig.10 Curve of the objective function with the number of iterations
| 变量 | 优化前 | 优化后 | 变量 | 优化前 | 优化后 |
|---|---|---|---|---|---|
| l1 | 120 | 105.437 | l6 | 160 | 205.031 |
| l4 | 180 | 227.425 | d | 152 | 177.401 |
| l5 | 125 | 94.118 | e | 300 | 278.112 |
表4 优化前后各构件的参数值 (mm)
Tab.4 Parameter values of optimized mechanism components
| 变量 | 优化前 | 优化后 | 变量 | 优化前 | 优化后 |
|---|---|---|---|---|---|
| l1 | 120 | 105.437 | l6 | 160 | 205.031 |
| l4 | 180 | 227.425 | d | 152 | 177.401 |
| l5 | 125 | 94.118 | e | 300 | 278.112 |
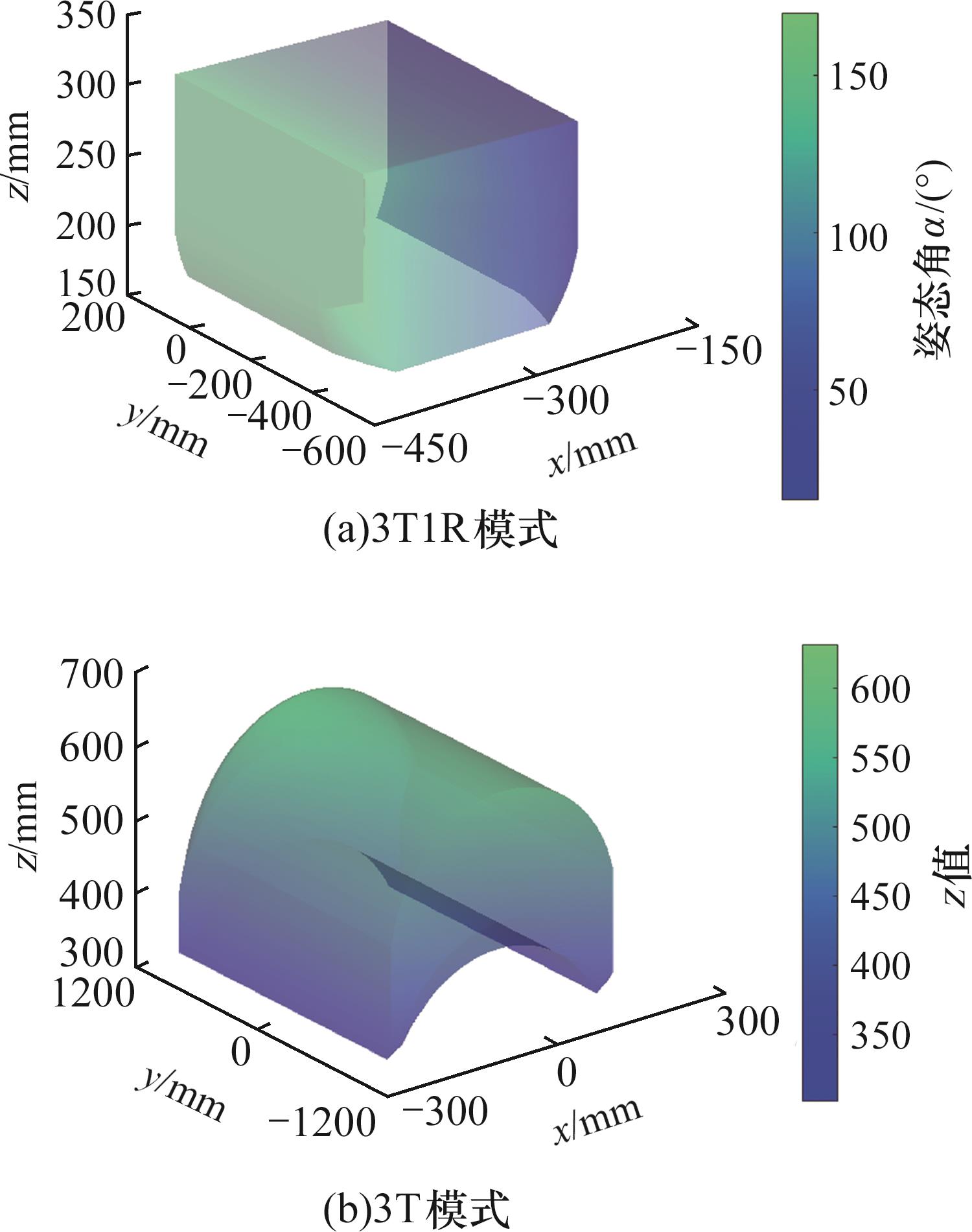
图13 优化后的机构工作空间
Fig.13 Workspace of the optimized mechanism
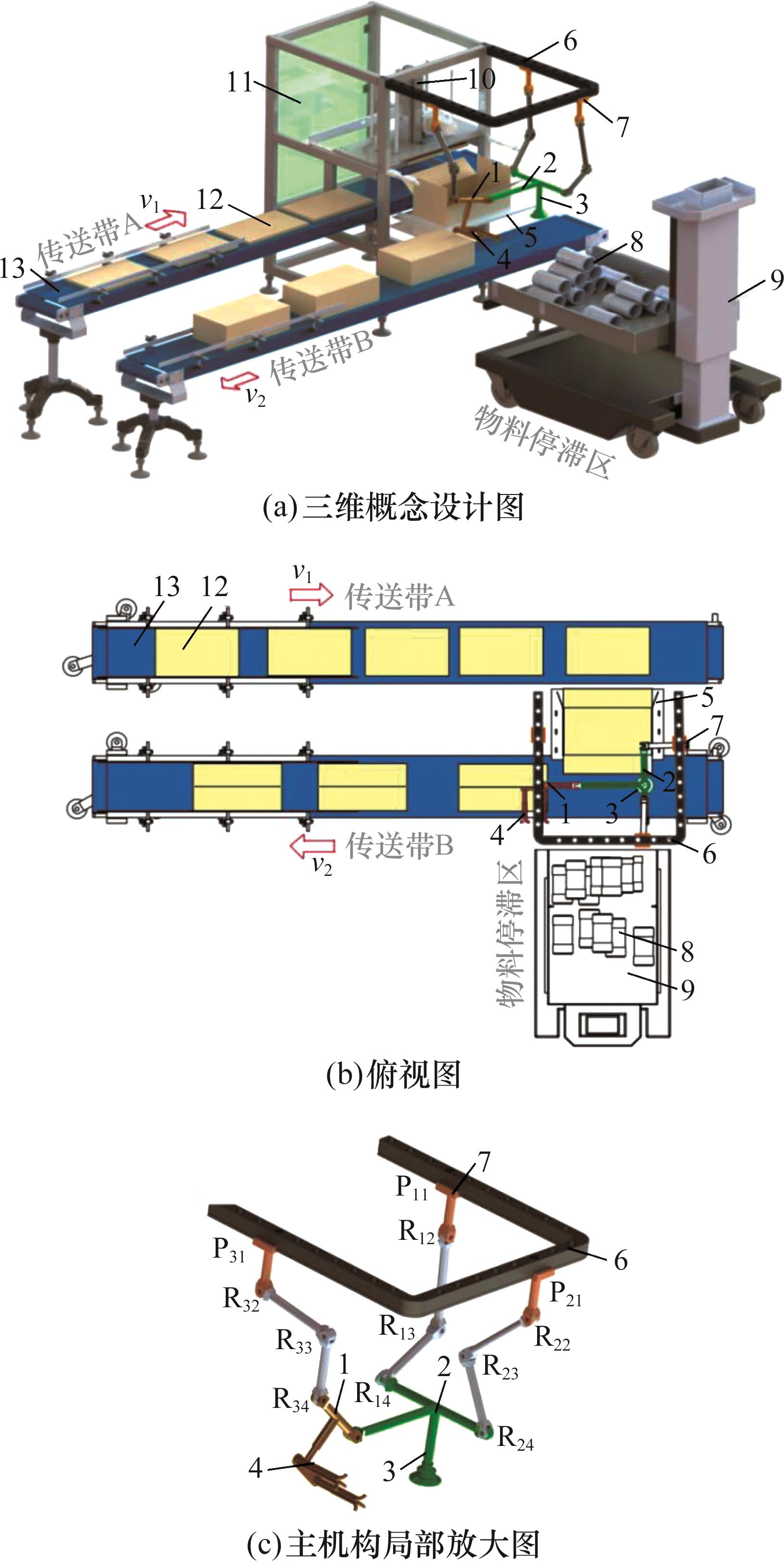
图14 应用场景概念设计图1.动平台1 2.动平台2 3.末端吸盘 4.末端旋转撑手5.纸箱承托平台 6.导轨 7.滑块8.涡轮洗衣机滚筒 9.运料车 10.气动机械手11.套袋封箱机 12.折叠纸箱 13.传送带
Fig.14 Conceptual design diagram of the application scenario
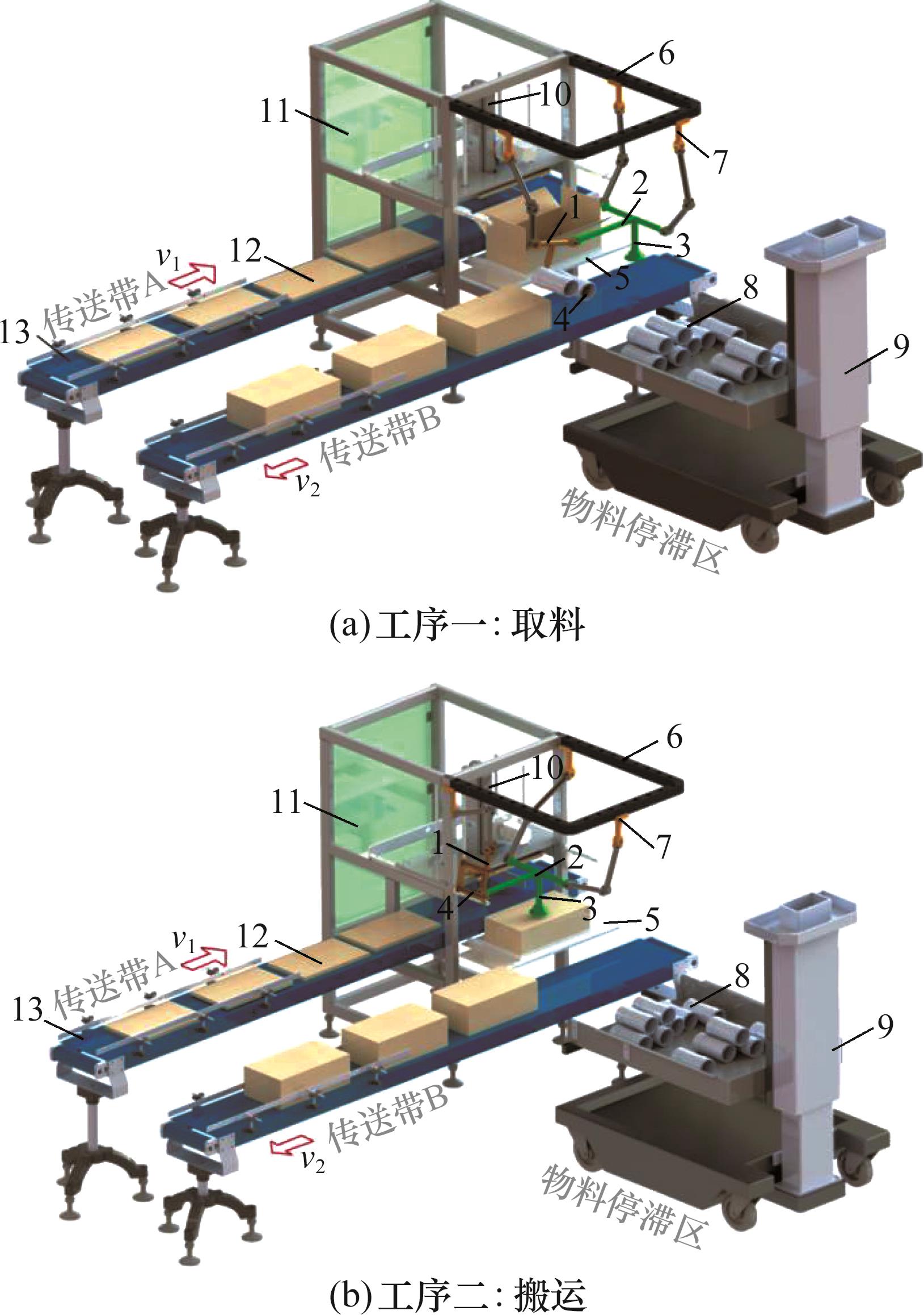
图15 可轮换用动平台并联机构工作流程图1.动平台1 2.动平台2 3.末端吸盘 4.末端旋转撑手5.纸箱承托平台 6.导轨 7.滑块 8.涡轮洗衣机滚筒9.运料车 10.气动机械手 11.套袋封箱机12.折叠纸箱 13.传送带
Fig.15 Workflow diagram of APM-PM
| [1] | KRUT S, COMPANY O, BENOIT M, et al. A New Parallel Mechanism for Scara Motions[C]∥ Proceedings of the 2003 IEEE International Conference on Robotics and Automation(ICRA 2003). New York, 2003:1875-1880. |
| [2] | GHAFFARI H, PAYEGANEH G, ARBABTAFTI M. Kinematic Design of a Novel 4-DOF Parallel Mechanism for Turbine Blade Machining[J]. The International Journal of Advanced Manufacturing Technology, 2014, 74(5): 729-739. |
| [3] | 贺磊盈, 涂叶凯, 叶伟, 等. 一种可整周回转的新型3T1R并联机构运动学分析[J]. 机械工程学报, 2018, 54(11): 151-160. |
| HE Leiying, TU Yekai, YE Wei, et al. Kinematics Analysis of a Novel 3T1R Parallel Manipulator with Full Rotational Capability[J]. Journal of Mechanical Engineering, 2018, 54(11): 151-160. | |
| [4] | BOURI M, CLAVEL R. The Linear Delta: Developments and Applications[C]∥ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics). Munich, 2010: 1-8. |
| [5] | PRAUSE I, CHARAF EDDINE S, et al. Comparison of Parallel Kinematic Machines with Three Translational Degrees of Freedom and Linear Actuation[J]. Chinese Journal of Mechanical Engineering, 2015, 28(4): 841-850. |
| [6] | MAZARE M, TAGHIZADEH M, RASOOL NAJAFI M. Kinematic Analysis and Design of a 3-DOF Translational Parallel Robot[J]. International Journal of Automation and Computing, 2017, 14(4): 432-441. |
| [7] | 吴砚博. 多模式机构模式切换力平稳性分析与冗余驱动优选研究[D]. 秦皇岛:燕山大学, 2023. |
| WU Yanbo. Study on The Stability Analysis of Mode Switching Force and Redundant Drive Optimization of Multimode Mechanism[D]. Qinhuangdao:Yanshan University, 2023. | |
| [8] | HUNT K. Kinematic Geometry of Mechanism[M]. Oxford: Clarendon Press, 1990. |
| [9] | ZLATANOV D, BONEV I, GOSSELIN C. Constraint Singularities as C-space Singularities[M]∥Advances in Rokot Kinematics. Dordrecht: Springer, 2002. |
| [10] | YE Wei, FANG Yuefa, GUO Sheng, et al. Two Classes of Reconfigurable Parallel Mechanisms Constructed with Multi-diamond Kinematotropic Chain[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(18): 3319-3330 |
| [11] | KONG Xianwen. Reconfiguration Analysis of a 4-DOF 3-RER Parallel Manipulator with Equilateral Triangular Base and Moving Platform[J]. Mechanism and Machine Theory, 2016, 98: 180-189. |
| [12] | 沈惠平,潘海月,李菊,等. 运动解耦且位置正解符号化的三维平移操作手:中国,202310760734.9[P]. 2023-08-29. |
| SHEN Huiping, PAN Haiyue, LI Ju, et al . A 3 -DOF Translational Manipulator with Motion Decoupling and Symbolic Forward Position Solutions:China, 202310760734.9[P]. 2023-08-29. | |
| [13] | 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012. |
| YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology[M]. Beijing: Science Press, 2012 | |
| [14] | 沈惠平, 邓嘉鸣, 李菊, 等. 少维输入-多维期望运动输出并联机构及其应用[J]. 机械设计与制造工程, 2013, 42(6): 1-4. |
| SHEN Huiping, DENG Jiaming, LI Ju, et al. Fewer Inputs-more Expected Outputs Parallel Mechanisms and Application[J]. Machine Design and Manufacturing Engineering, 2013, 42(6): 1-4. | |
| [15] | 沈惠平, 李菊, 朱小蓉, 等. 基于最优路径的并联机构自由度计算方法及其新公式[J]. 机械工程学报, 2024, 60(19): 40-52. |
| SHEN Huiping, LI Ju, ZHU Xiaorong, et al. New Method and Formula for Degree-of-freedom Calculation of Parallel Mechanism Based on Optimal Paths[J]. Journal of Mechanical Engineering, 2024, 60(19): 40-52. | |
| [16] | 沈惠平, 李菊, 吴广磊, 等. 并联机器人机构的拓扑结构优化[M]. 北京: 高等教育出版社, 2025. |
| SHEN Huiping, LI Ju, WU Guanglei, et al. Topological Structure Optimization for Parallel Robotic Mechanisms[M]. Beijing: Higher Education Press, 2025. | |
| [17] | 沈惠平. 并联机器人机构拓扑分析: 方法与技巧及应用[M]. 南京: 江苏凤凰教育出版社, 2025. |
| SHEN Huiping. Topological Analysis for Parallel Robotic Mechanisms[M]. Nanjing:Jiangsu Phoenix Education Publishing, Ltd,, 2025. | |
| [18] | 杨廷力. 机械系统基本理论: 结构学·运动学·动力学[M]. 北京: 机械工业出版社, 1996. |
| YANG Tingli. Basic Theory of Mechanical System: Structure, Kinematics and Dynamics[M]. Beijing: China Machine Press, 1996. | |
| [19] | 沈惠平. 机器人机构拓扑特征运动学[M]. 北京: 高等教育出版社, 2021. |
| SHEN Huiping. Topological Characteristics-based Kinematics for Robotic Mechanisms[M]. Beijing: Higher Education Press, 2021. | |
| [20] | 王佳睿, 张德强. 包装机PVC夹持步进装置同步带传动机构建模与动态特性分析[J]. 机械设计与制造, 2024(10): 203-208. |
| WANG Jiarui, ZHANG Deqiang. Modeling and Dynamic Characteristics Analysis of Synchronous Belt Transmission Mechanism in PVC Clamping and Stepping Device for Packaging Machine[J]. Machinery Design & Manufacture, 2024(10): 203-208. |
| [1] | 李明磊, 贾育秦, 张学良, 刘丽琴, 杜娟, 温淑花, 兰国生. 基于多目标差异演化算法的并联机构结构优化 [J]. J4, 201016, 21(16): 1915-1920. |
| [2] | 鲁开讲, 师俊平, 张锋涛. 平面三自由度并联机构动力学优化设计 [J]. J4, 201016, 21(16): 1926-1931. |
| [3] | 战晓磊, 辛洪兵, 汉斯·彼德 兰特斯. 基于虚拟现实的MOTOMAN-HP3型机器人运动学仿真 [J]. J4, 201016, 21(16): 1952-1954,1998. |
| [4] | 杨明星, 沈佳乐, 高鹏, 张兴, 王俊翔. 连续体机器人设计与导向路径损失补偿策略[J]. 中国机械工程, 2025, 36(12): 2820-2828. |
| [5] | 耿宇航, 何雪明, 高宗. 基于NURBS啮合线的高效双螺杆转子自适应设计方法[J]. 中国机械工程, 2025, 36(12): 2837-2845. |
| [6] | 王旭浩, 盛卧龙, 吴孟丽, 许贻龙, 赵晓巍, 曹轶然. 可伸缩蛇形臂机器人的设计及运动学建模[J]. 中国机械工程, 2025, 36(12): 2885-2893. |
| [7] | 倪涛, 赵亚辉, 赵泽仁, 杨凯强. 6-UPRU并联机器人动力学建模及基本动力学参数确定[J]. 中国机械工程, 2025, 36(12): 2911-2919. |
| [8] | 罗敏, 黄聪剑, 李巧珍, 徐亭亭, 付彦博. 基于光滑粒子流体动力学-有限元法耦合算法的膨胀管磨铣效果影响因素研究[J]. 中国机械工程, 2025, 36(12): 2927-2935. |
| [9] | 印峰, 黄欣, 周佳义. 基于流模型的冗余机器人逆运动学解高精度计算[J]. 中国机械工程, 2025, 36(12): 2960-2967. |
| [10] | 吕谦, 刘维伟. 增材喷管收扩段磨粒流光整分子动力学仿真与参数优化研究[J]. 中国机械工程, 2025, 36(12): 3017-3022. |
| [11] | 莫帅, 张燕琛, 李亚鑫, 李贝贝, 陈素姣, 彭南江, 张伟. 铝合金搅拌摩擦焊系统非线性振动特性[J]. 中国机械工程, 2025, 36(12): 3023-3029. |
| [12] | 莫帅, 黄轩, 刘文斌, 张伟. 连续可调行星齿轮超材料非线性动力学[J]. 中国机械工程, 2025, 36(11): 2509-2516. |
| [13] | 张博, 程明霞, 史云帆, 陈丽. 预变形Jeffcott裂纹转子超谐波共振的动力学响应[J]. 中国机械工程, 2025, 36(11): 2554-2562. |
| [14] | 刘伟渭, 李阔, 王泓霁, 余玺. 磁悬浮列车随机非线性最优控制研究[J]. 中国机械工程, 2025, 36(11): 2583-2592. |
| [15] | 贺乐君, 习毅, 刘文, 严翔, 忻明杰, 王朝阳. 压力倍放高精感知机构设计方法研究[J]. 中国机械工程, 2025, 36(11): 2601-2608. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||