ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (12): 2920-2926.DOI: 10.3969/j.issn.1004-132X.2025.12.014
• 机械基础工程 • 上一篇
张雷( ), 杨聪楠, 李崴一, 赵一洁, 王晓聪
), 杨聪楠, 李崴一, 赵一洁, 王晓聪
Lei ZHANG(), Congnan YANG, Weiyi LI, Yijie ZHAO, Xiaocong WANG
摘要:
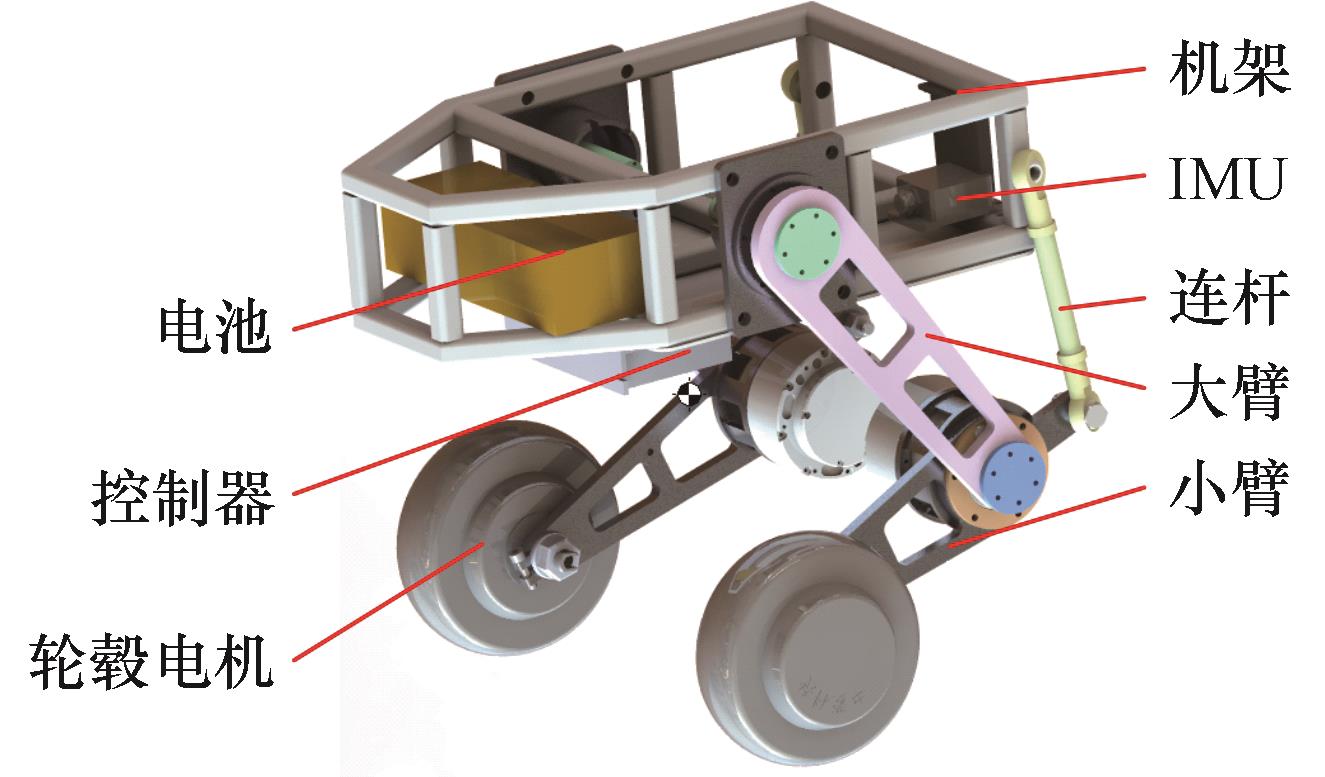
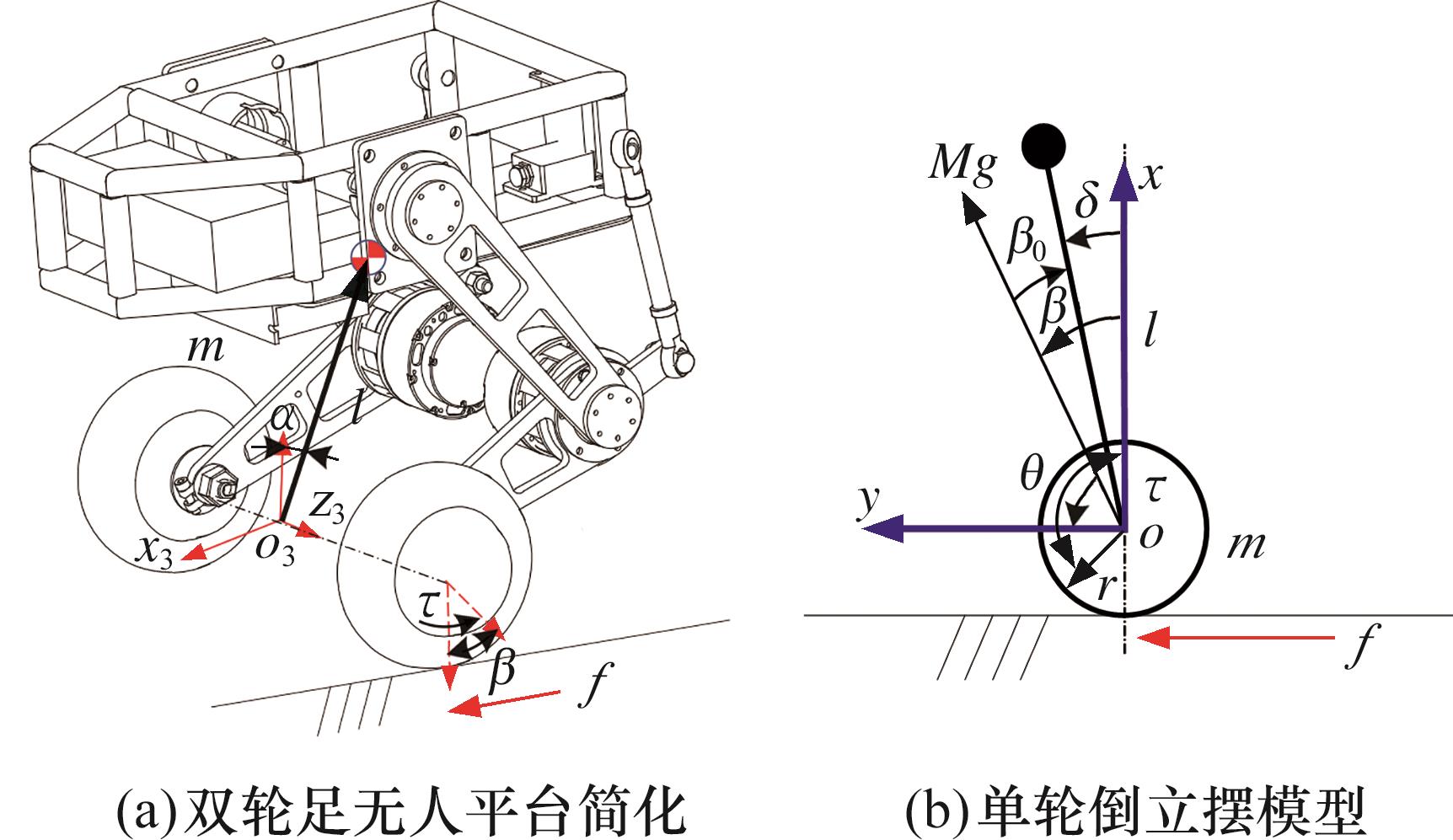
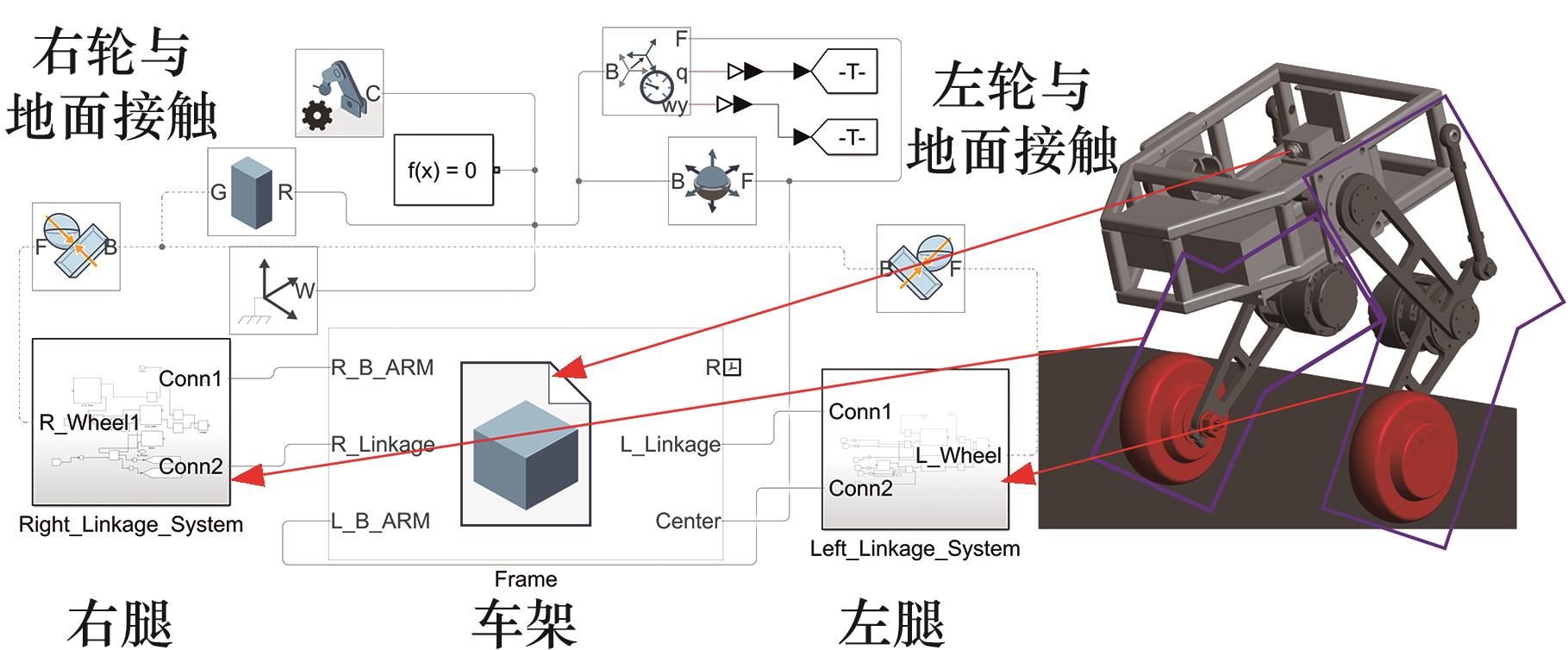
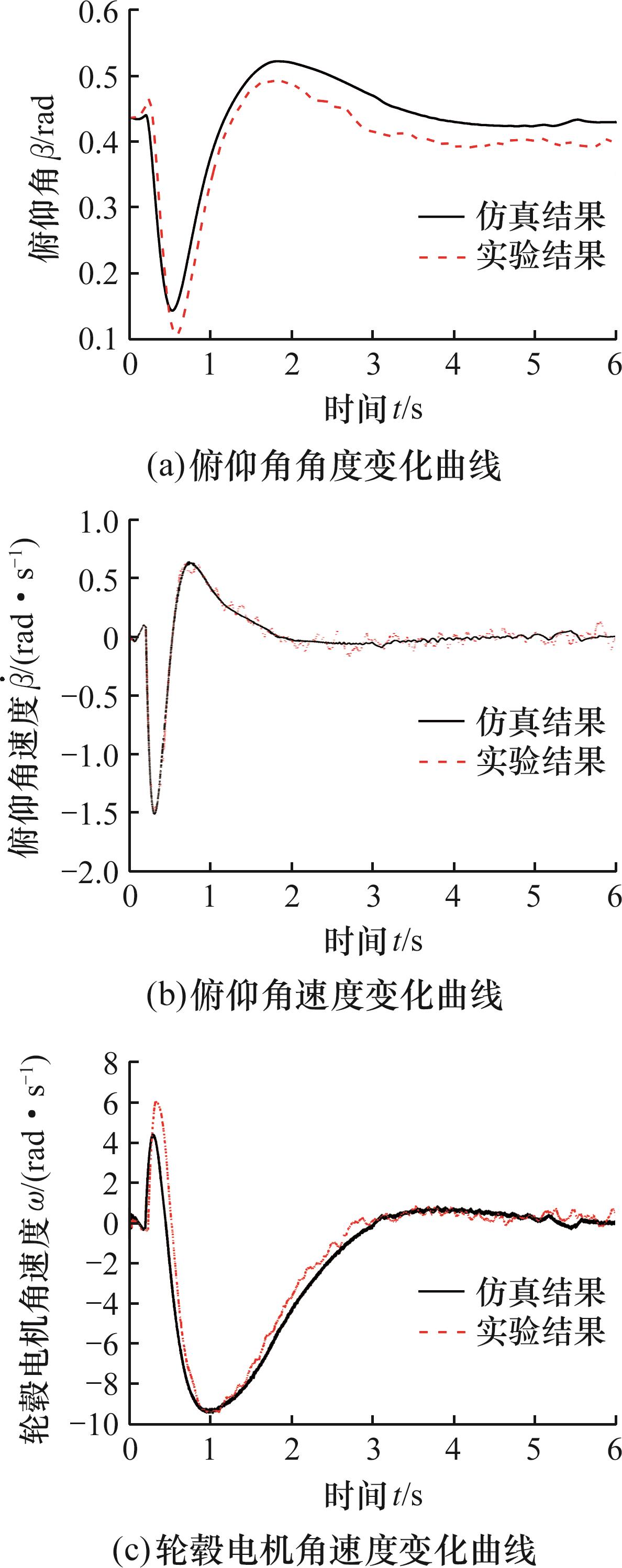
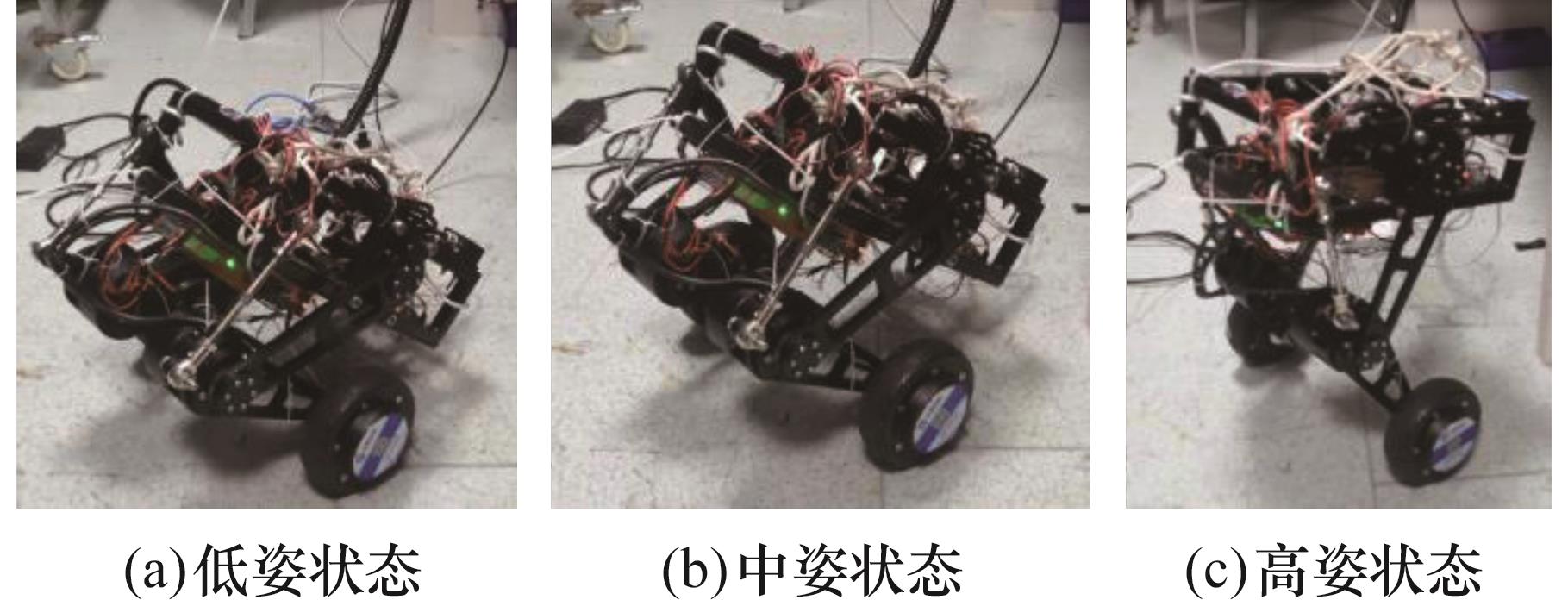
轮足式平台在腿部结构末端安装驱动轮,兼具铺装路面的高通过性和越野路面的高机动性,平台变高度时重心位置的变化对稳定性影响较大。为增强变高度自适应能力,建立平台的动力学模型,并在平衡点处作线性化处理。根据线性化状态方程特点,基于积分控制原理扩张状态变量,建立了扩张后的状态空间模型。采用线性二次型调节器分层控制方法获得反馈控制律,搭建了仿真模型,试制了物理样机,开展了仿真及实验研究。结果表明,提出的反馈控制率能够很好地实现平台的自平衡,扩张的状态变量也能很好地平衡重心位置的变化,实现平台变高度自适应平衡控制。
中图分类号: