ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (12): 2911-2919.DOI: 10.3969/j.issn.1004-132X.2025.12.013
倪涛1,2,3( ), 赵亚辉1,2,3(), 赵泽仁1,2,3, 杨凯强1,2,3
), 赵亚辉1,2,3(), 赵泽仁1,2,3, 杨凯强1,2,3
NI Tao1,2,3(), ZHAO Yahui1,2,3(), ZHAO Zeren1,2,3, YANG Kaiqiang1,2,3
摘要:
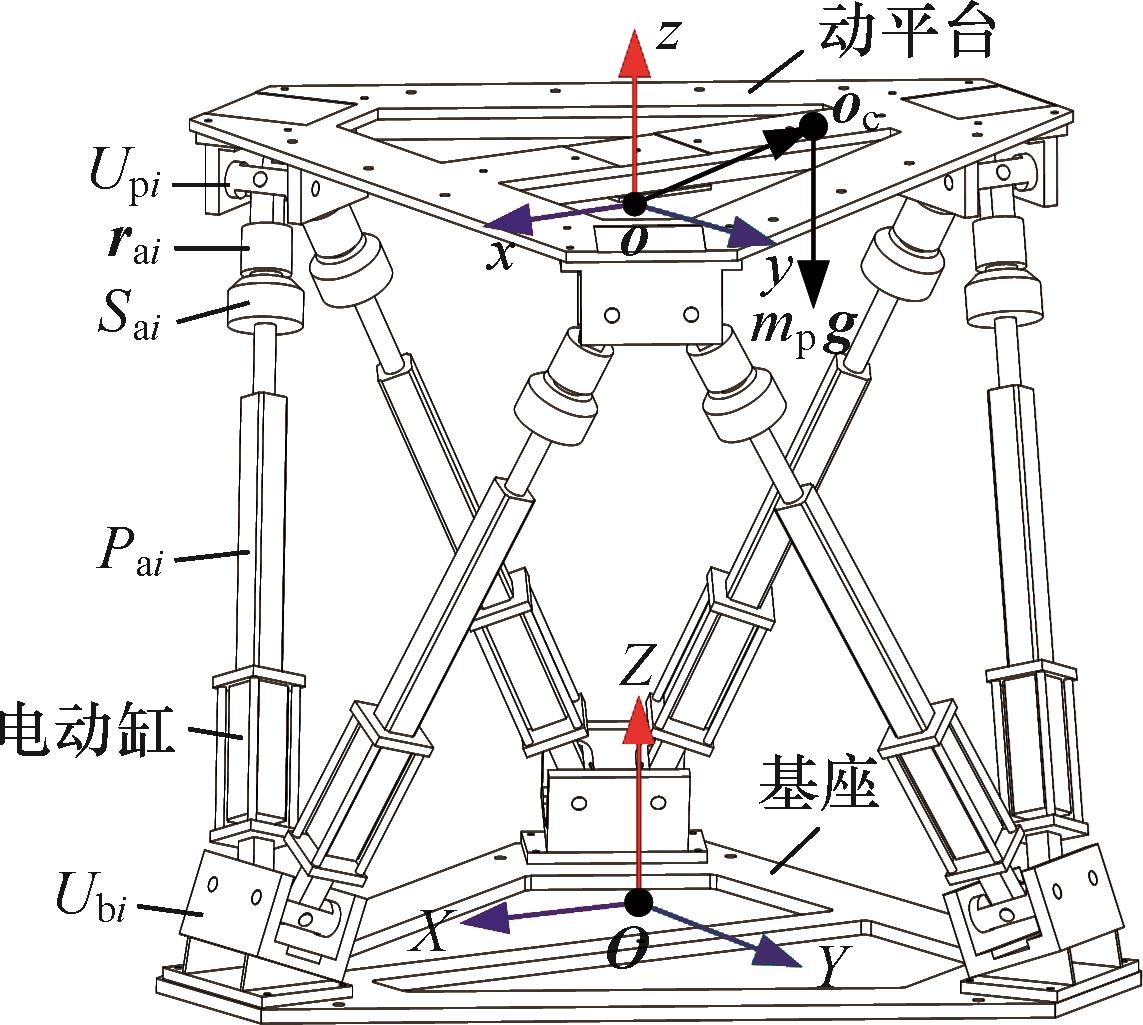
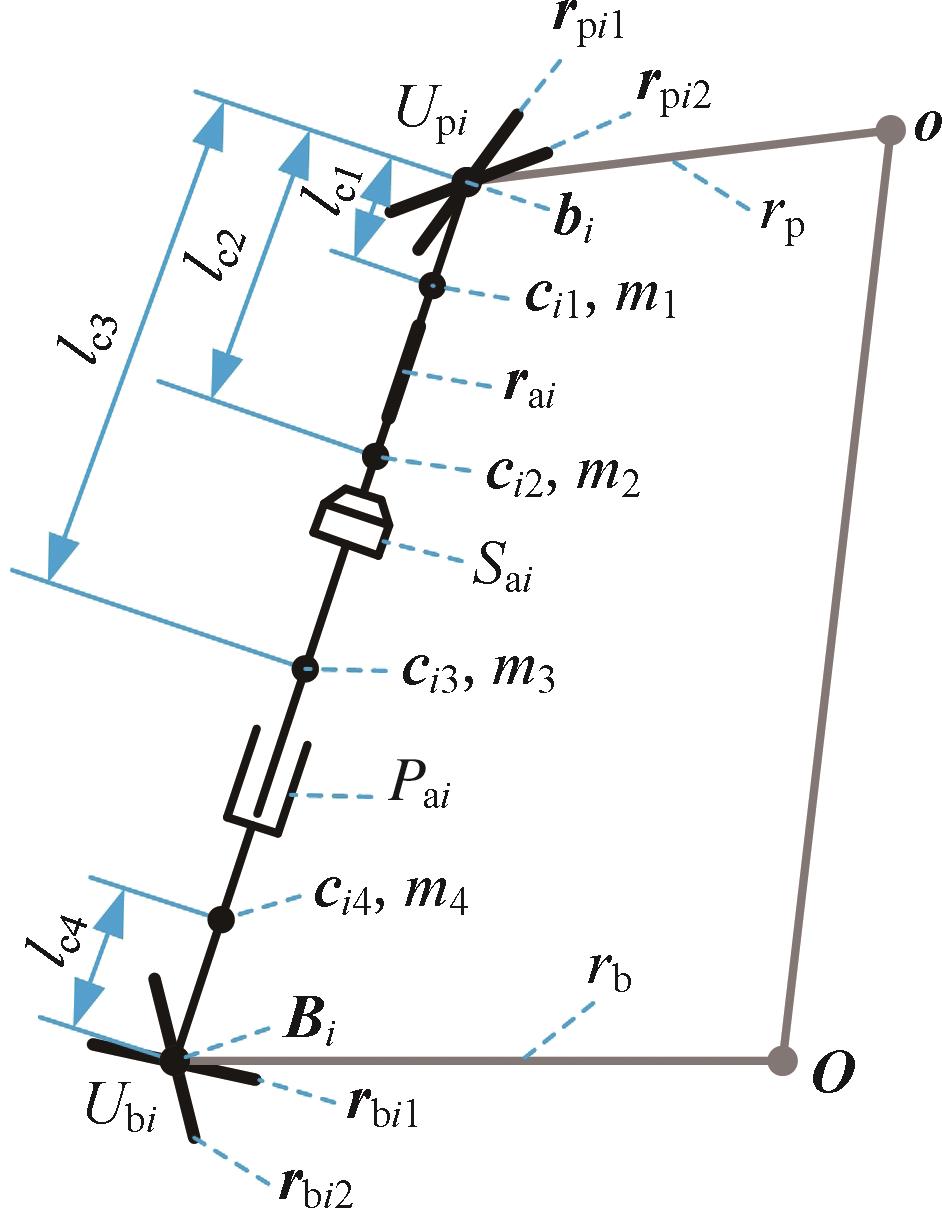
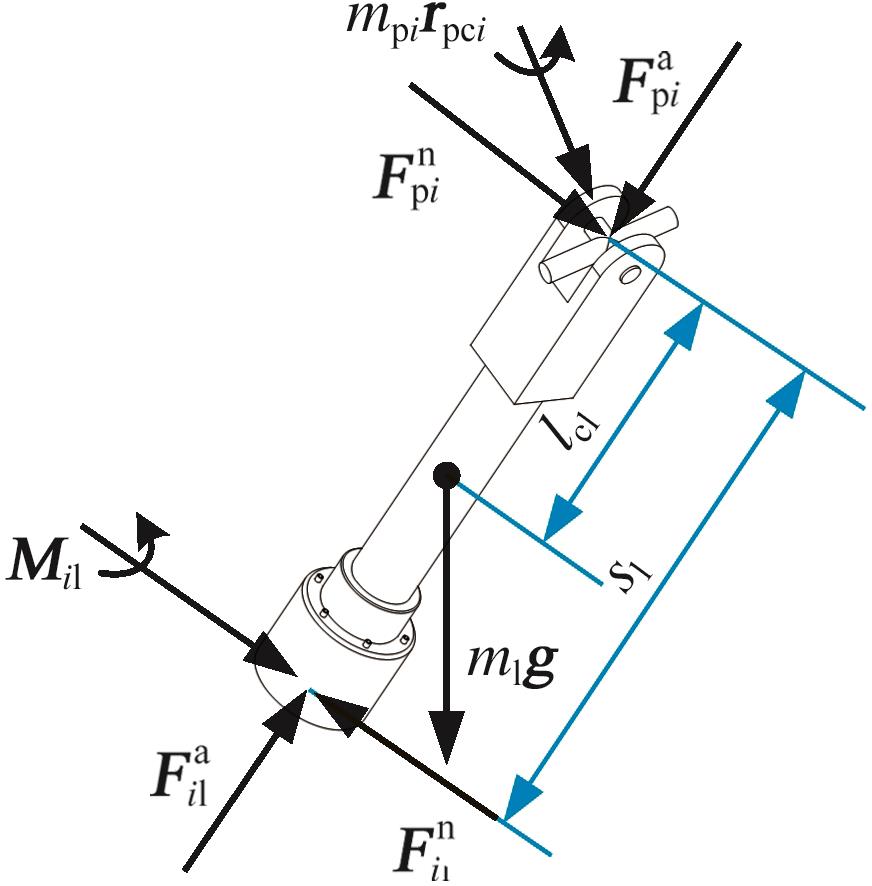
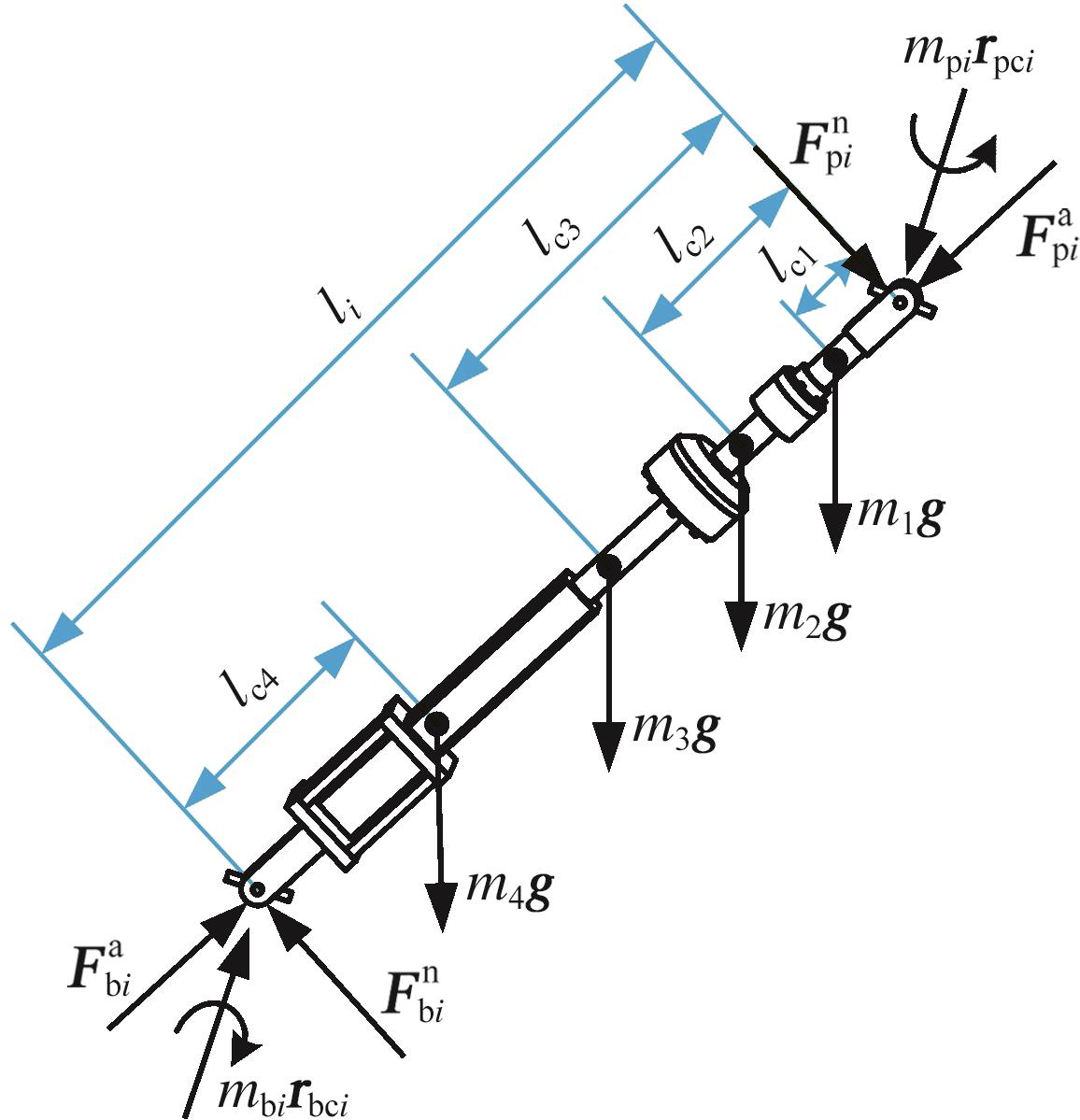
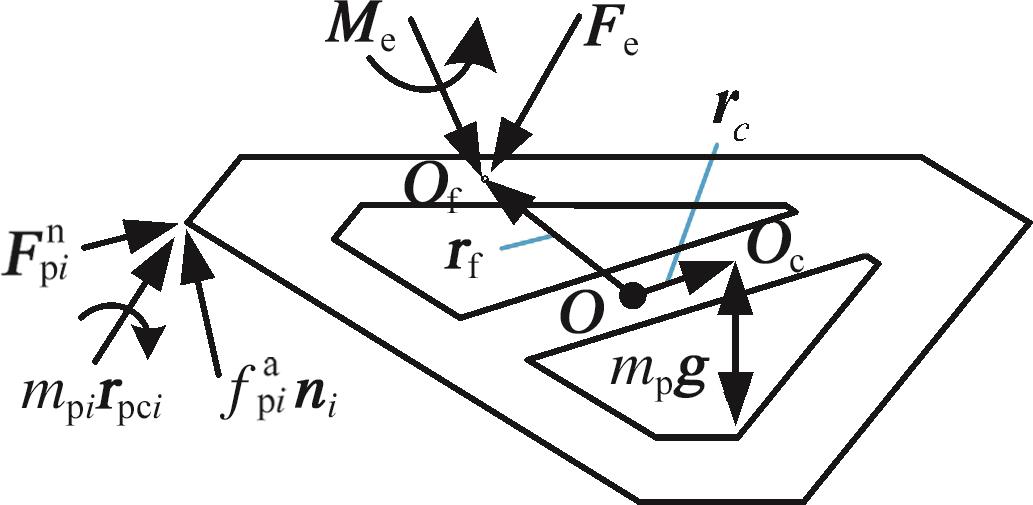
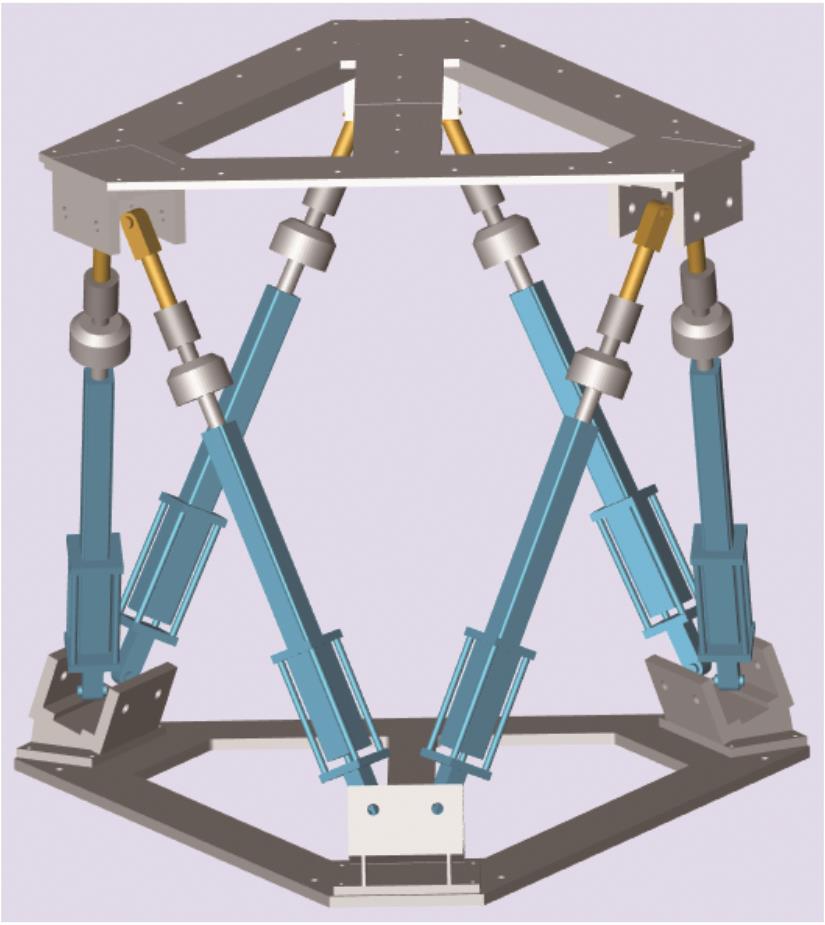
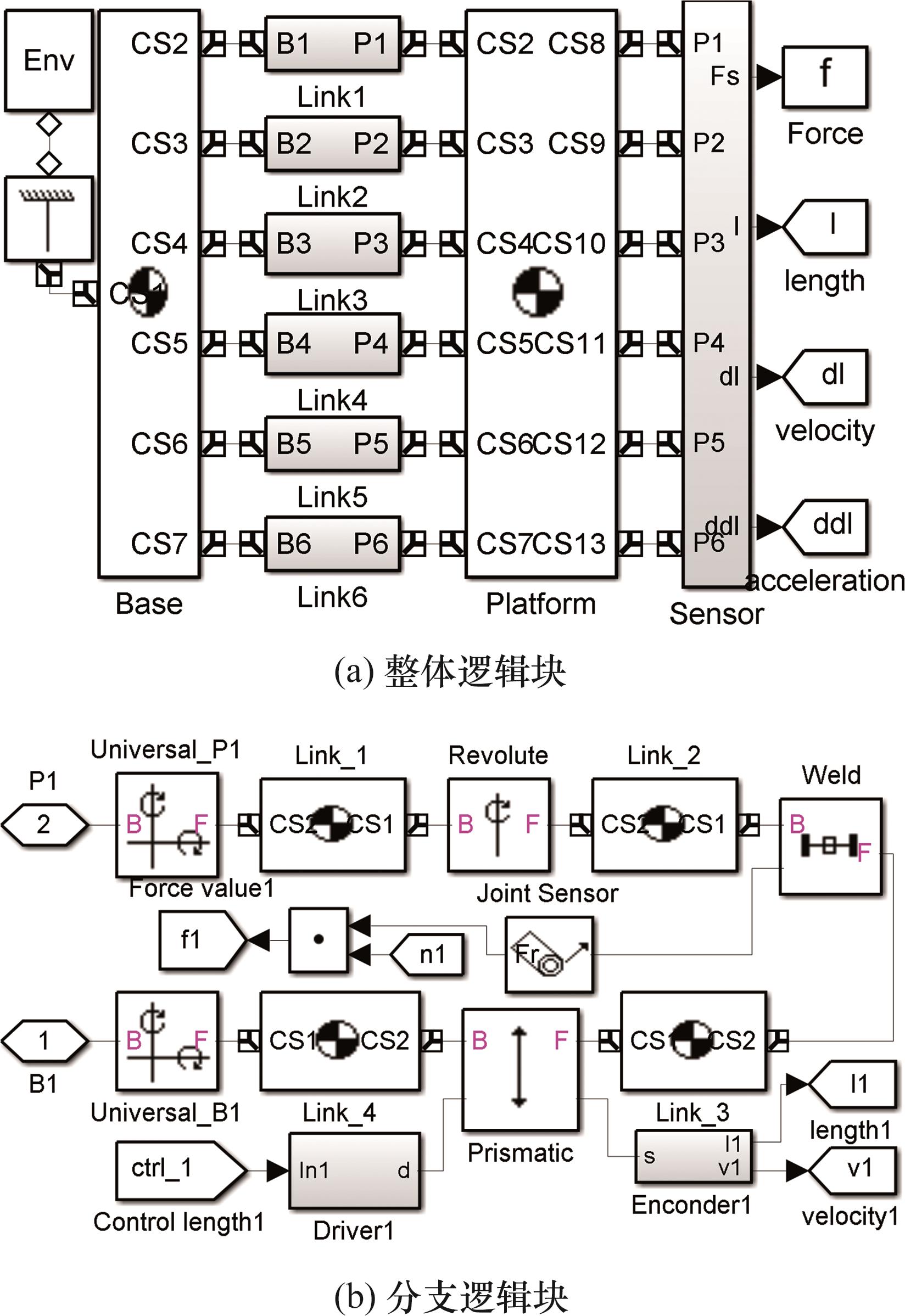
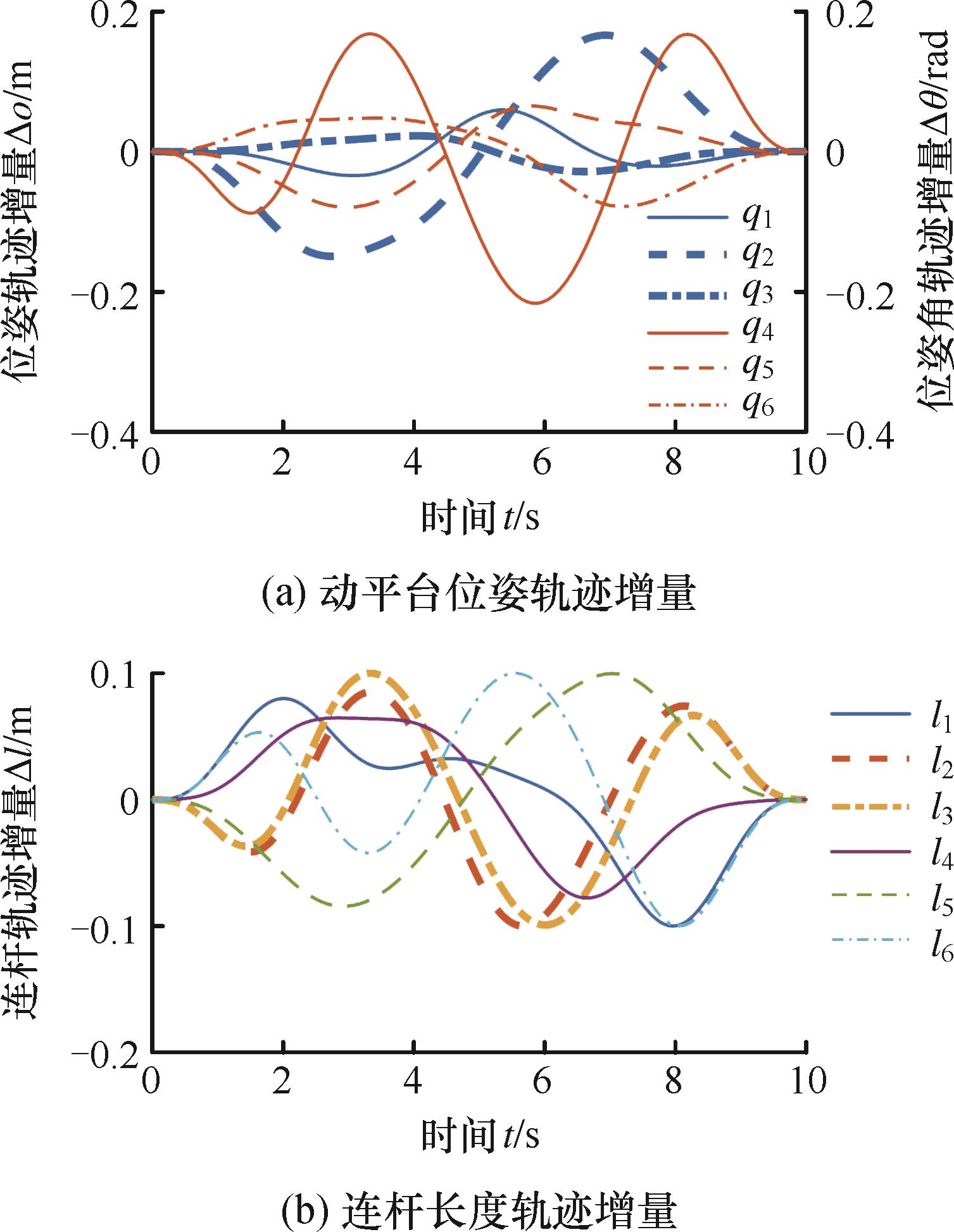
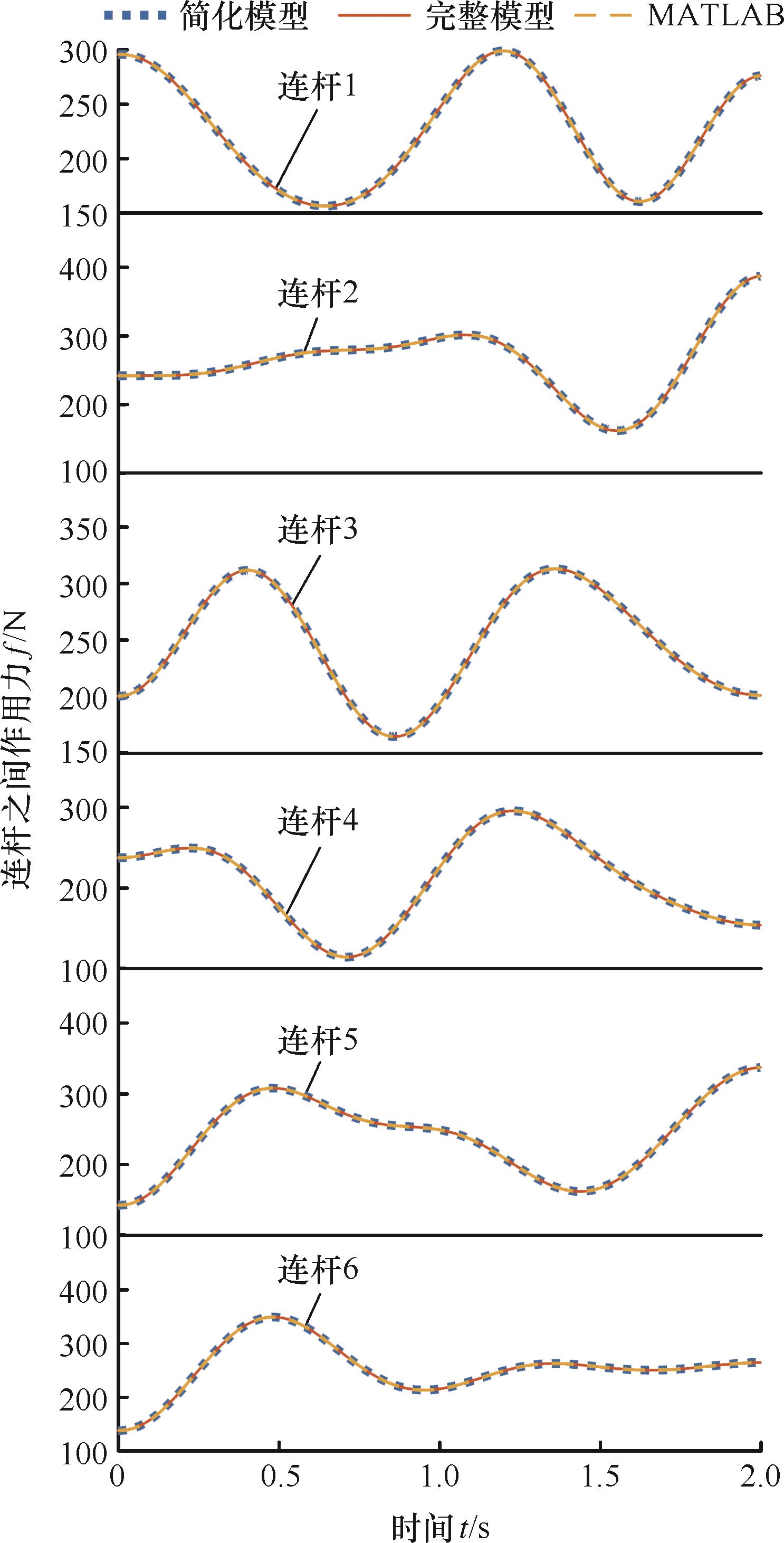
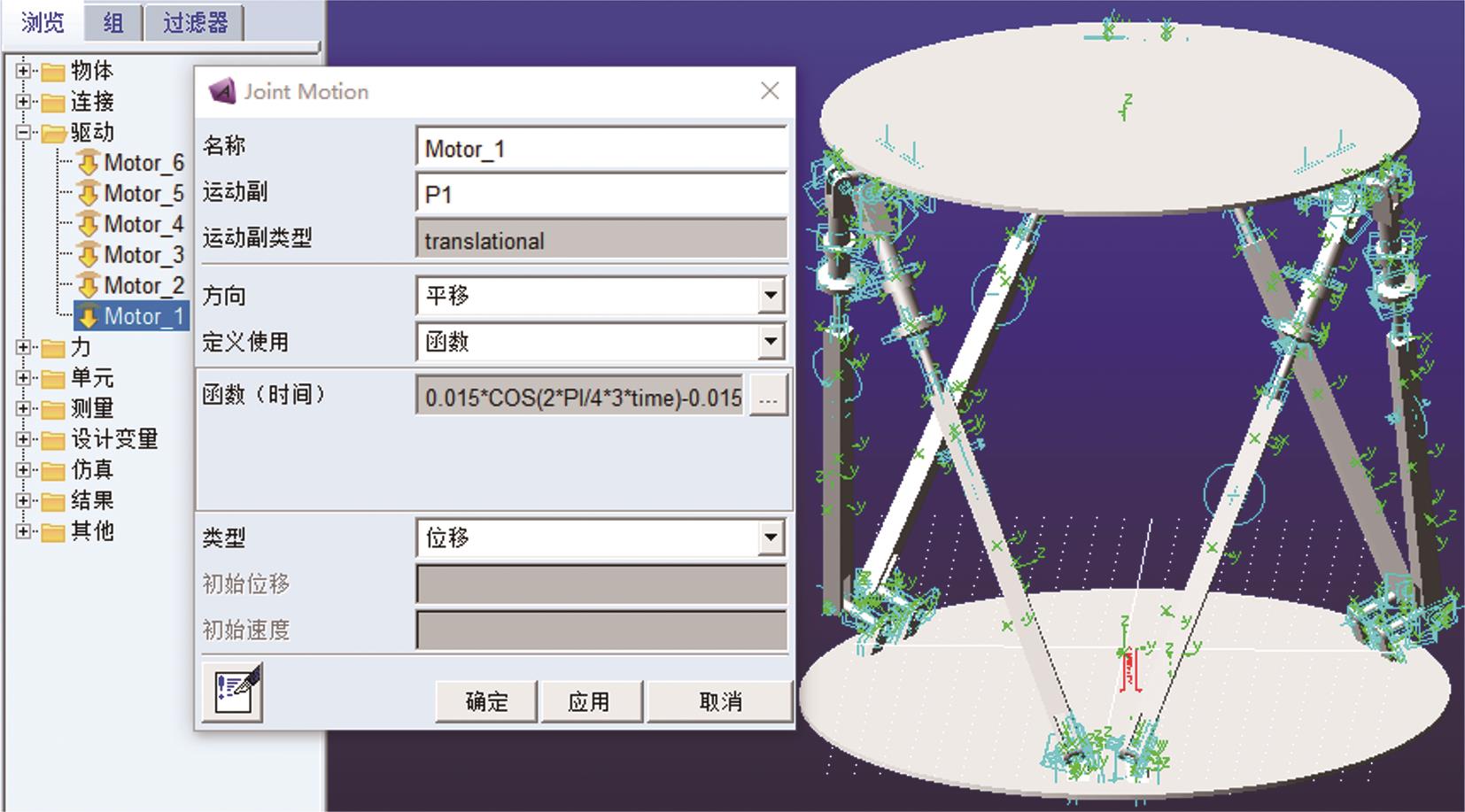
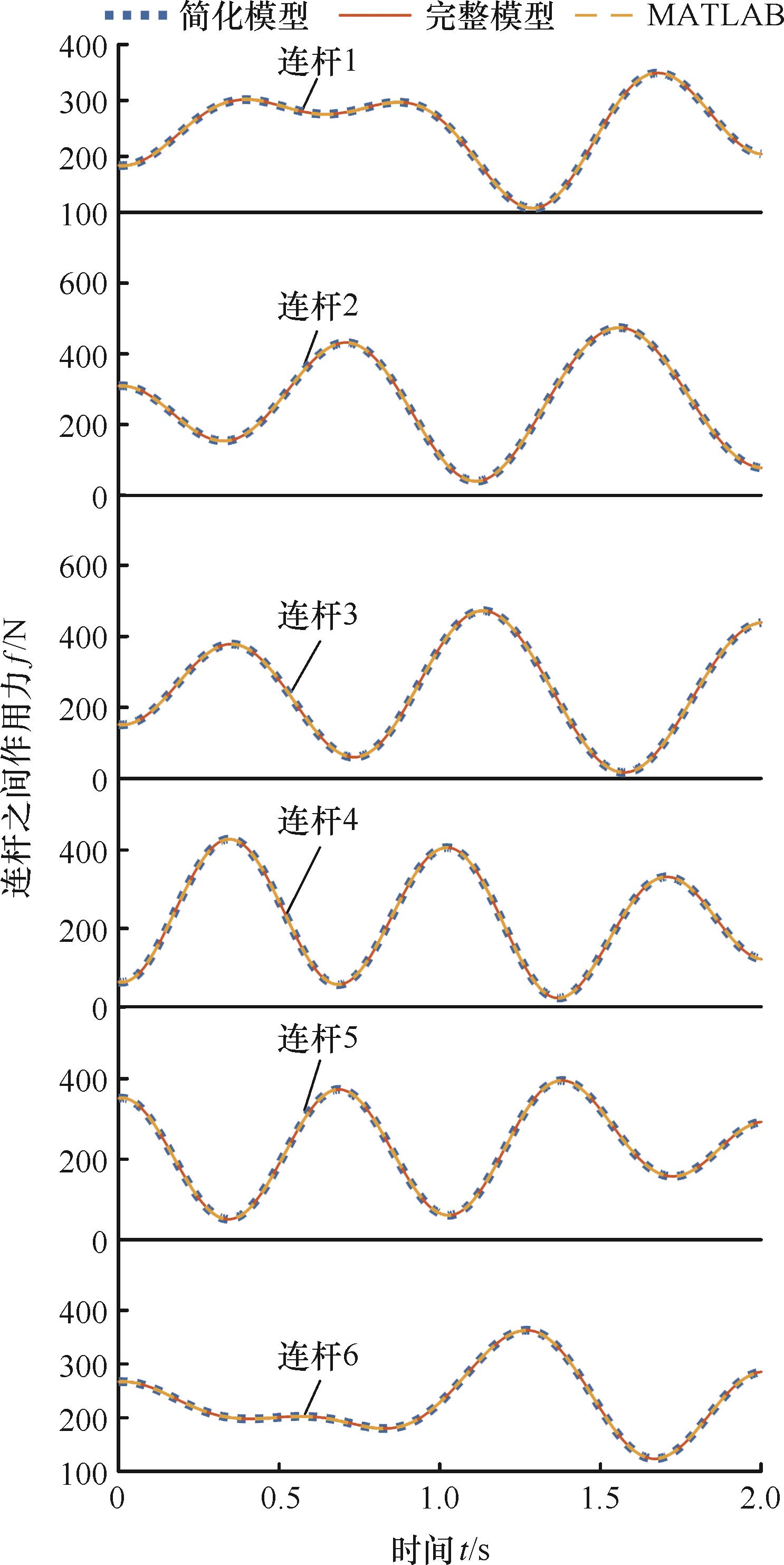
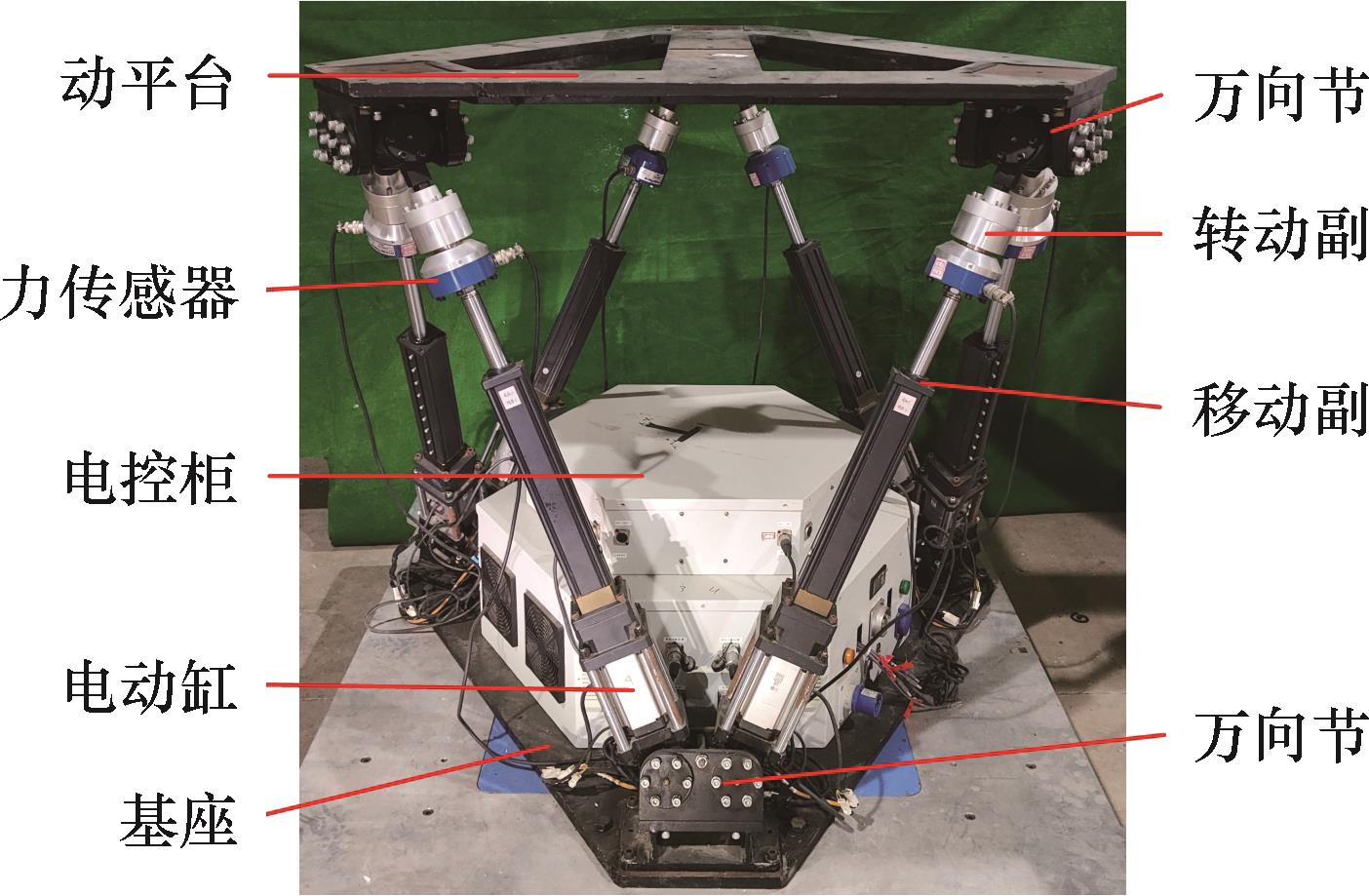
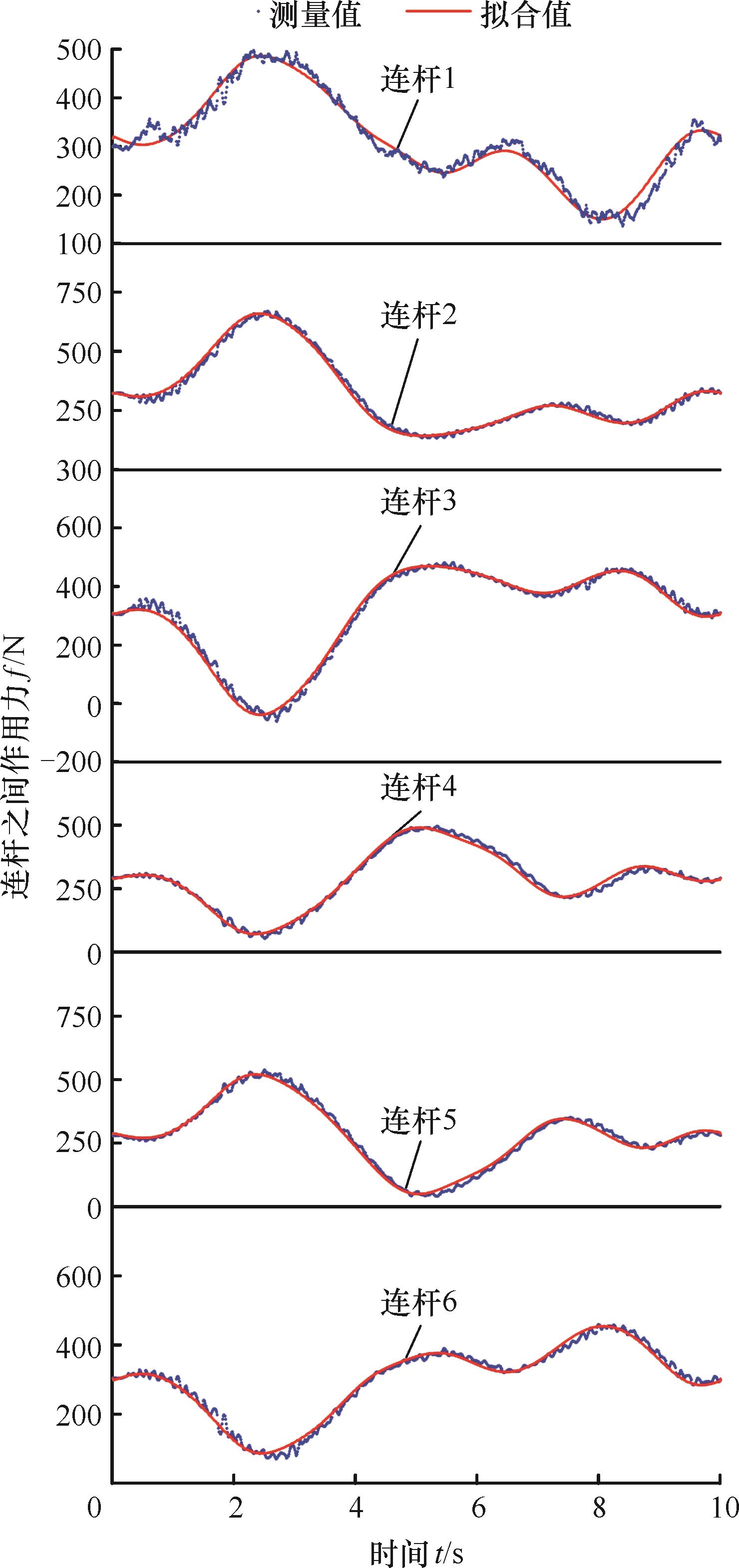
为克服并联机器人动力学模型应用难题,以6-UPRU型并联机器人作为研究对象,对其精确动力学建模及基本动力学参数确定问题进行了研究。首先对机器人的各运动构件进行详细的运动学分析;然后基于牛顿-欧拉法推导机器人的精确动力学模型,并结合提出的模型线性化运算规则,将其转化为关于动力学参数的线性表达形式;随后,以最小化观测矩阵条件数为优化目标,设计了一条满足物理约束的五阶傅里叶级数形式的激励轨迹;进一步,通过对观测矩阵进行QR分解,成功提取了基本动力学参数,将动力学参数从29个减少至17个,有效解决了参数冗余问题;最后,通过SimMechanics和ADAMS仿真平台下的力拟合实验以及样机基本动力学参数辨识实验,验证了理论模型的正确性。
中图分类号: