

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (10): 2369-2378.DOI: 10.3969/j.issn.1004-132X.2025.10.026
Previous Articles Next Articles
Xinyao TANG1,2( ), Rong YIN1,2, Xupeng WANG1,2(), Jiayin YANG1,2, Xiaoyi LIU1,2, Yuyang HAO1,2
), Rong YIN1,2, Xupeng WANG1,2(), Jiayin YANG1,2, Xiaoyi LIU1,2, Yuyang HAO1,2
Received:2024-07-25
Online:2025-10-25
Published:2025-11-05
Contact:
Xupeng WANG
唐欣尧1,2(), 殷榕1,2, 王旭鹏1,2(), 杨佳音1,2, 刘晓宜1,2, 郝雨阳1,2
通讯作者:
王旭鹏
作者简介:唐欣尧,女,1995年生,讲师。研究方向为运动生物力学分析、人机交互与智能机器人控制、可穿戴外骨骼创新设计。E-mail:tangxy@xaut.edu.cn基金资助:CLC Number:
Xinyao TANG, Rong YIN, Xupeng WANG, Jiayin YANG, Xiaoyi LIU, Yuyang HAO. Design and Optimization of Human-machine Compatibility of Knee-ankle Exoskeletons[J]. China Mechanical Engineering, 2025, 36(10): 2369-2378.
唐欣尧, 殷榕, 王旭鹏, 杨佳音, 刘晓宜, 郝雨阳. 膝踝关节外骨骼人机匹配性设计与优化[J]. 中国机械工程, 2025, 36(10): 2369-2378.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.10.026
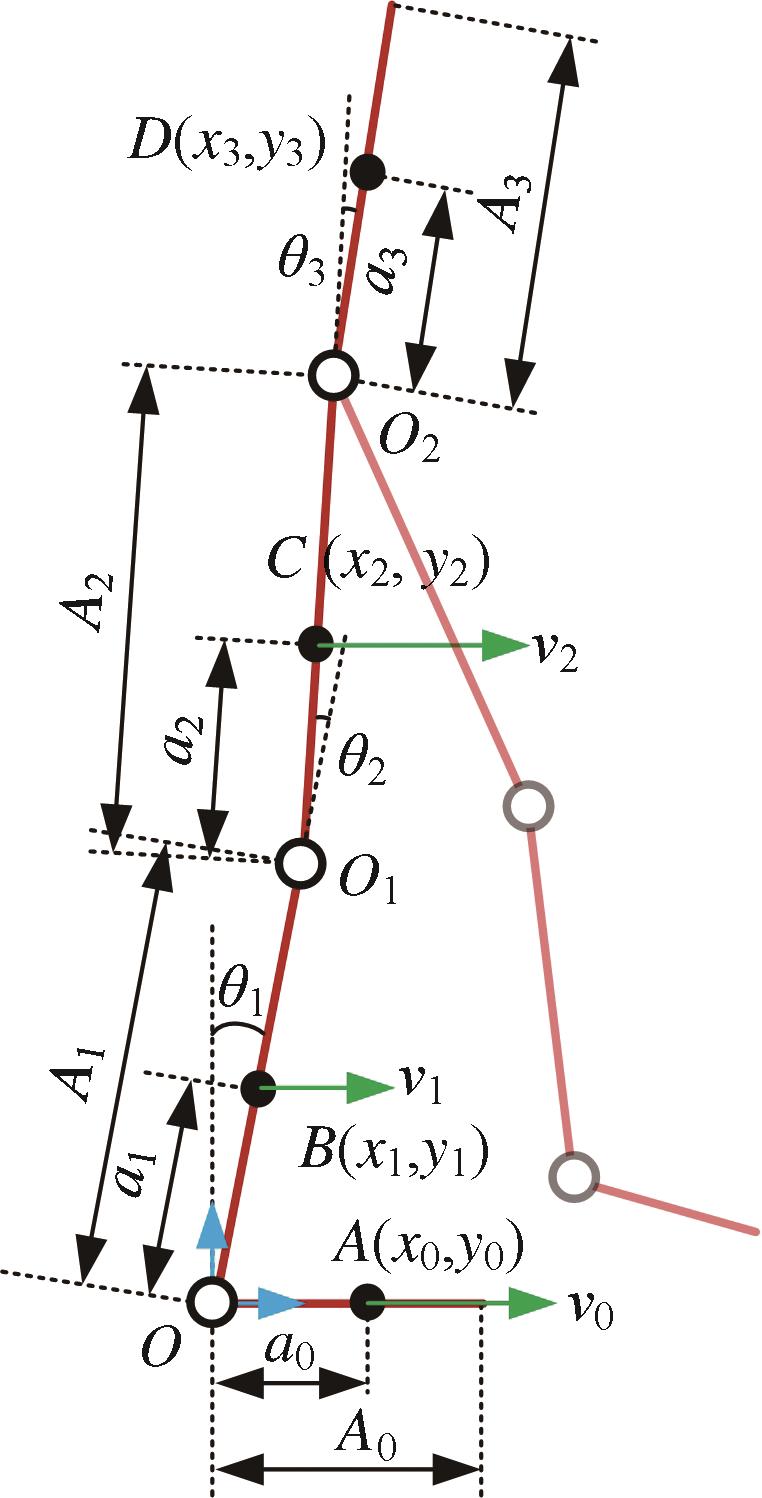
Fig.1 Lower limb dynamics model
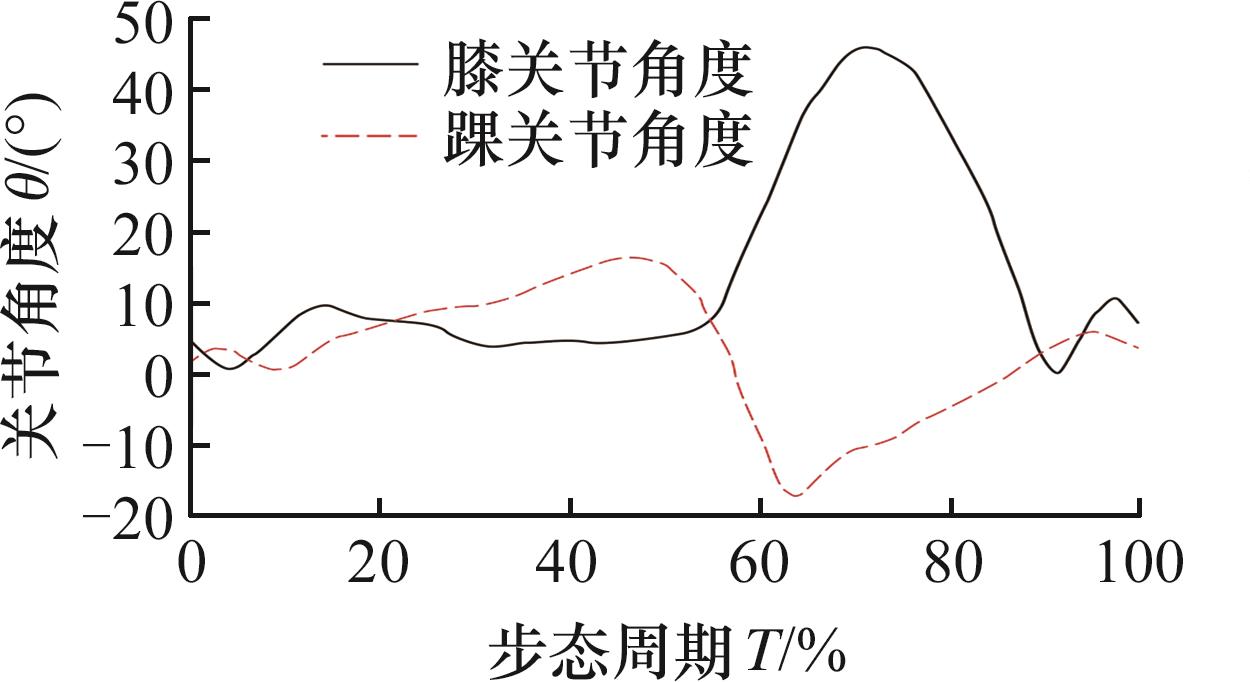
Fig.2 Changes in knee and ankle angles
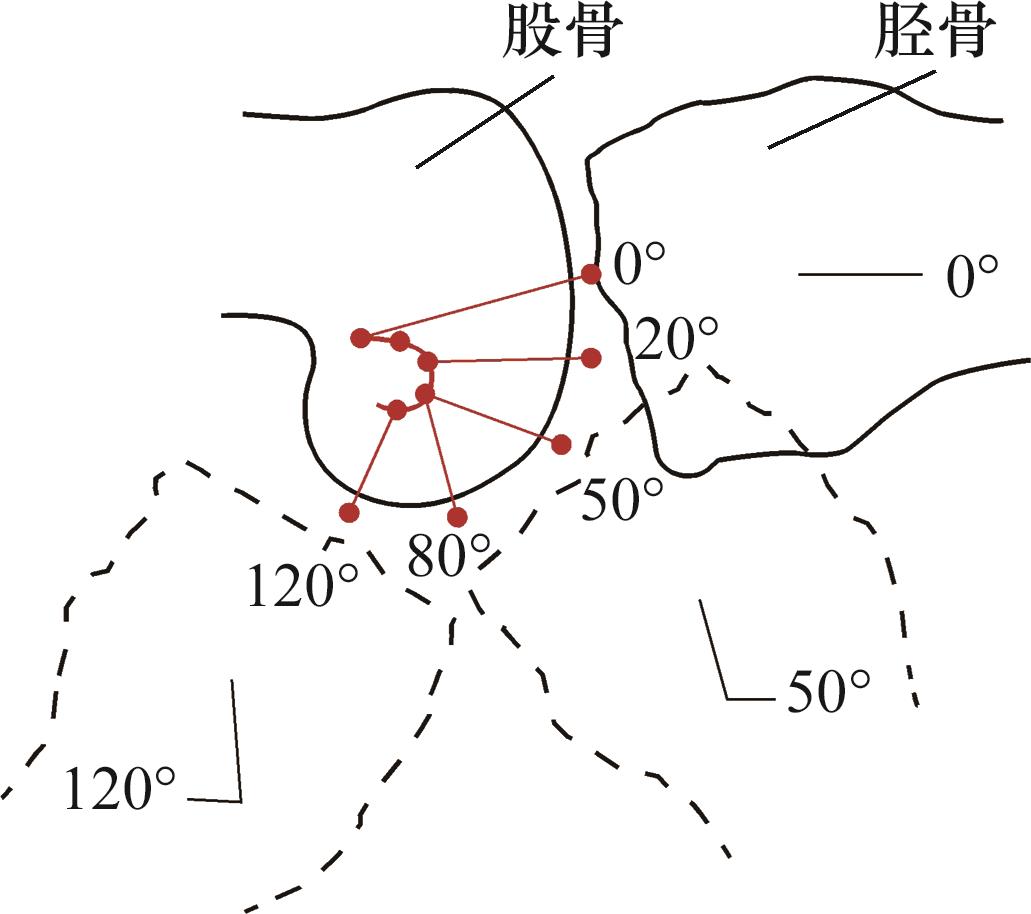
Fig.3 Instantaneous trajectory of knee
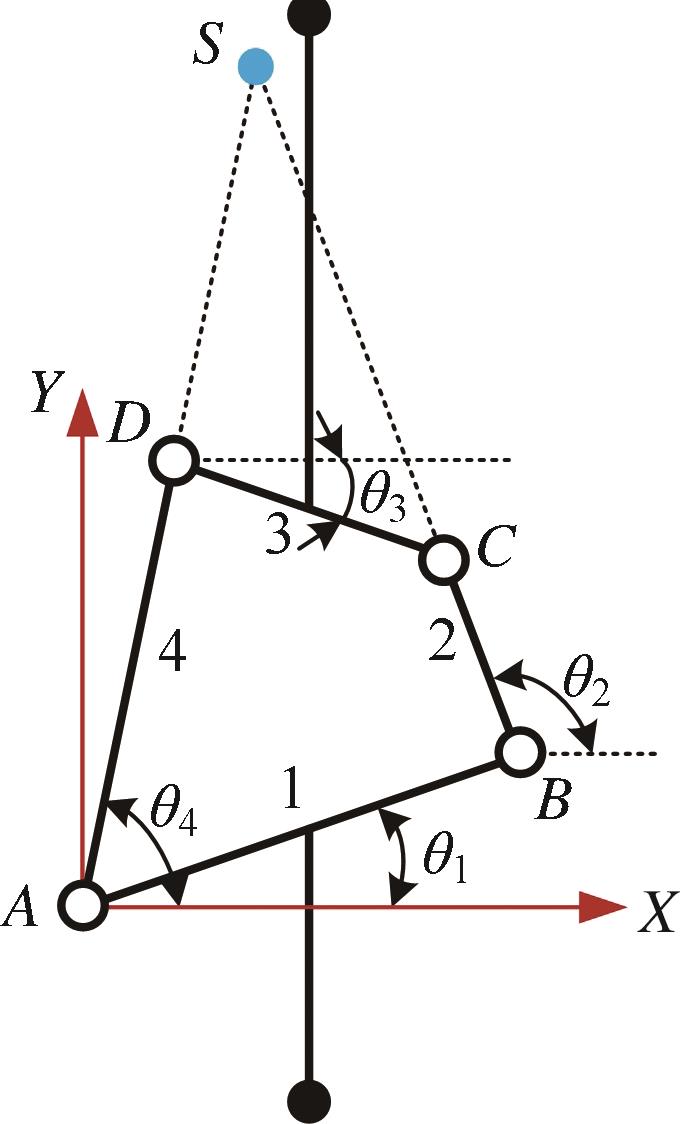
Fig.4 Four-bar kinematic model of knee
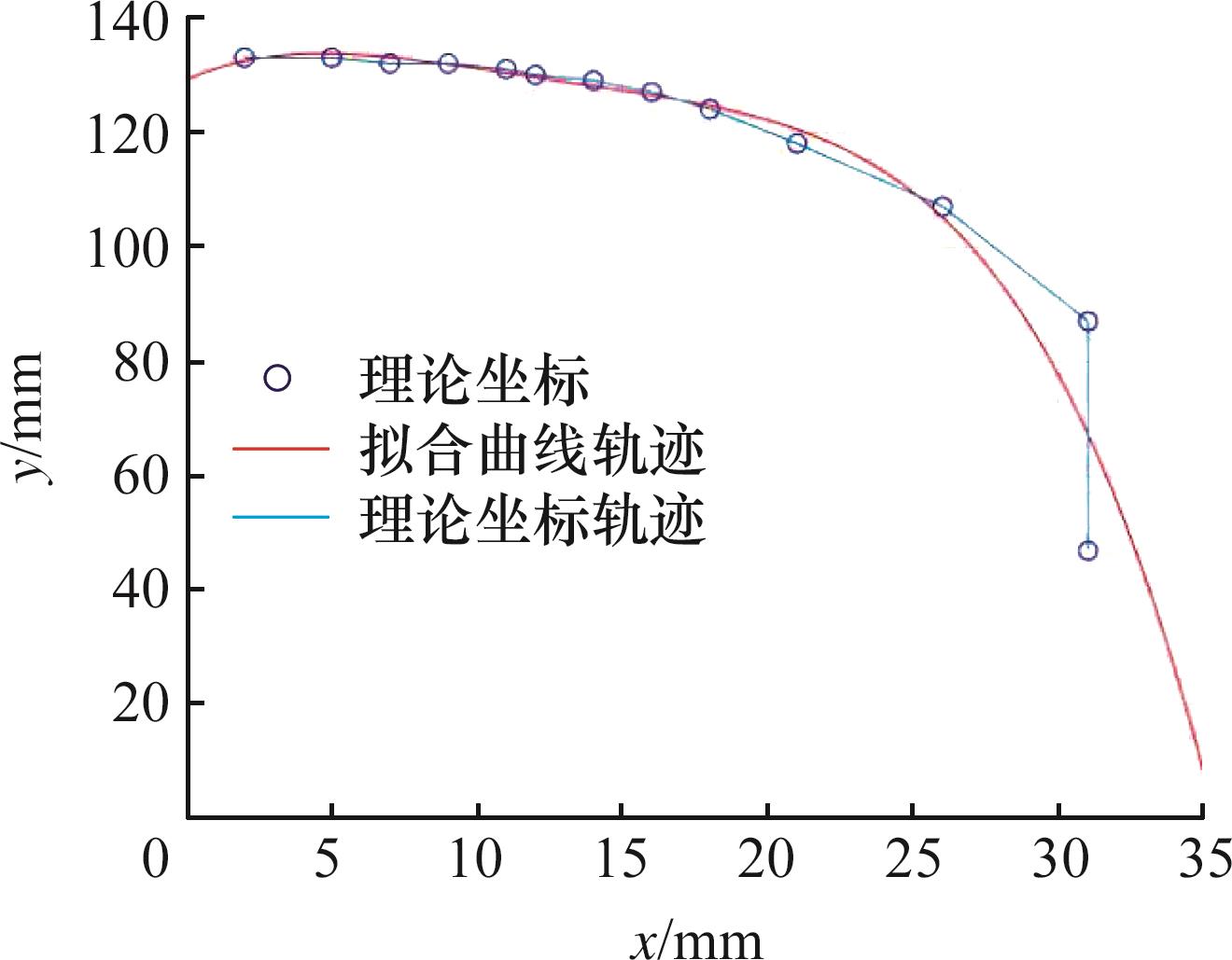
Fig.5 Theoretical instantaneous and fitting trajectory of knee
| 33.45 | 38.30 | 51.74 | 41.00 | 59.82 | 25.63 |
Tab.1 Optimized dimensions of four-bar linkage
| 33.45 | 38.30 | 51.74 | 41.00 | 59.82 | 25.63 |
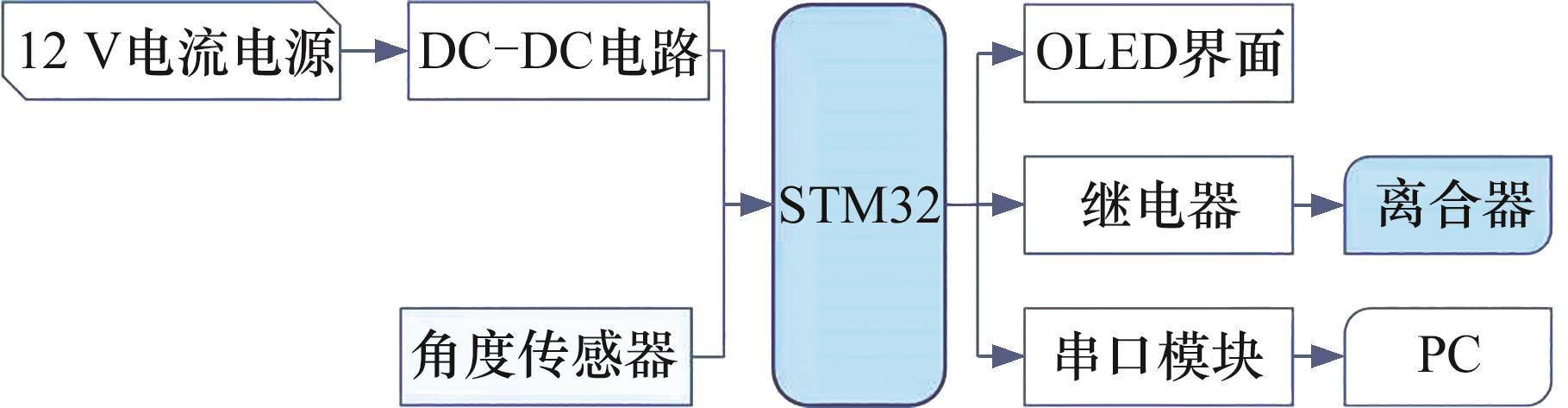
Fig.6 Clutch control circuit diagram
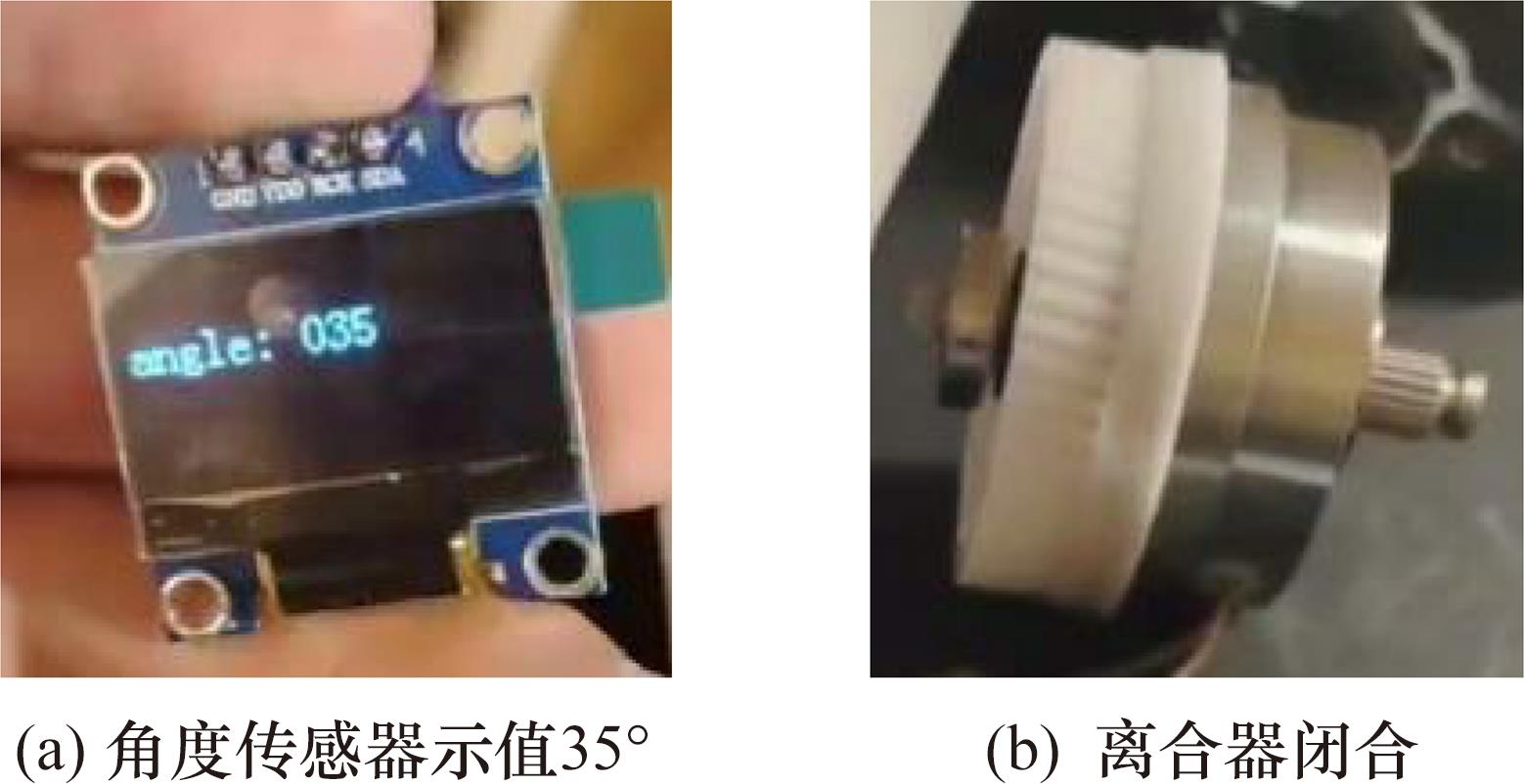
Fig.7 Test of the clutch closed state
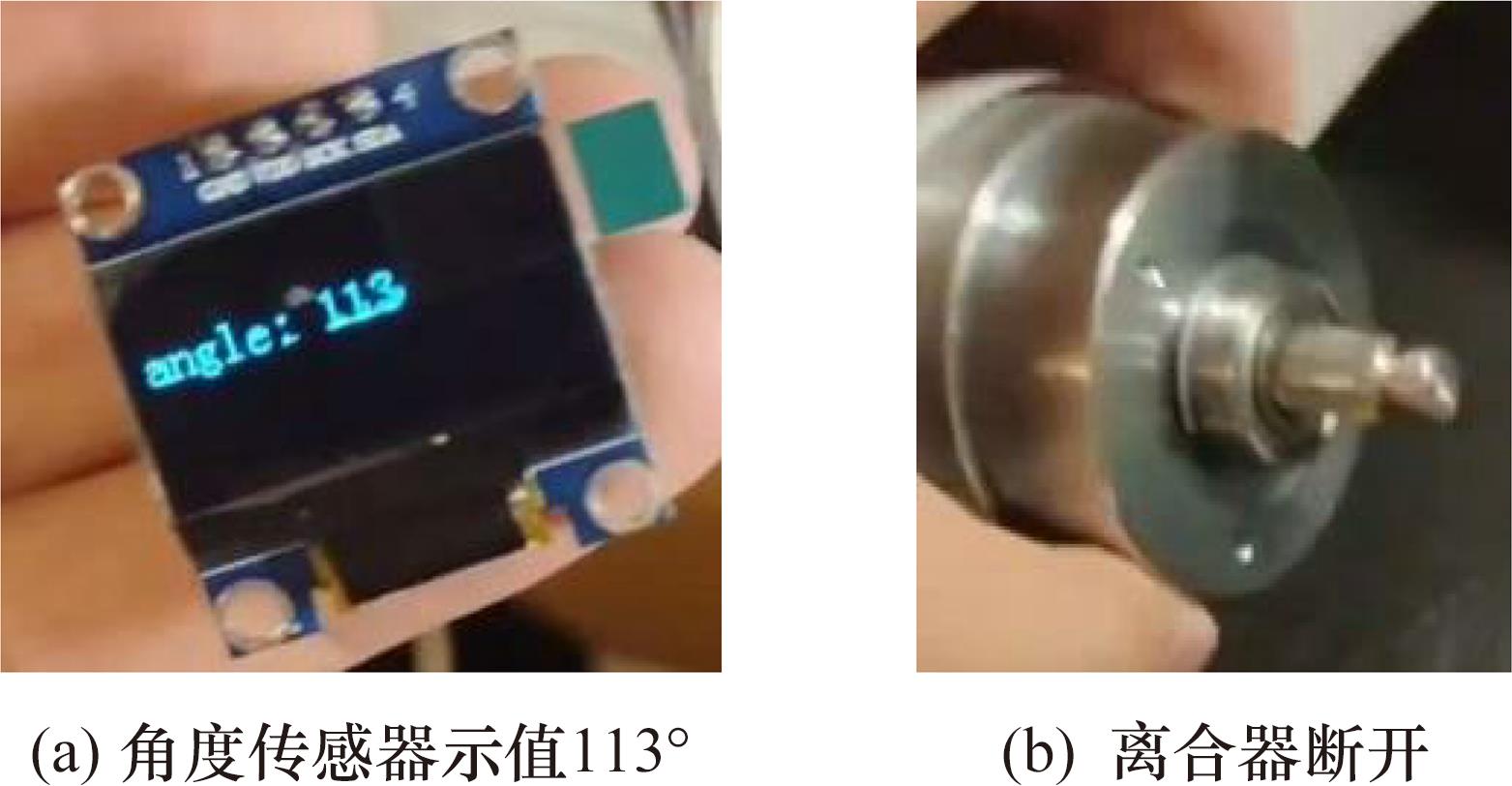
Fig.8 Test of the clutch disconnected state
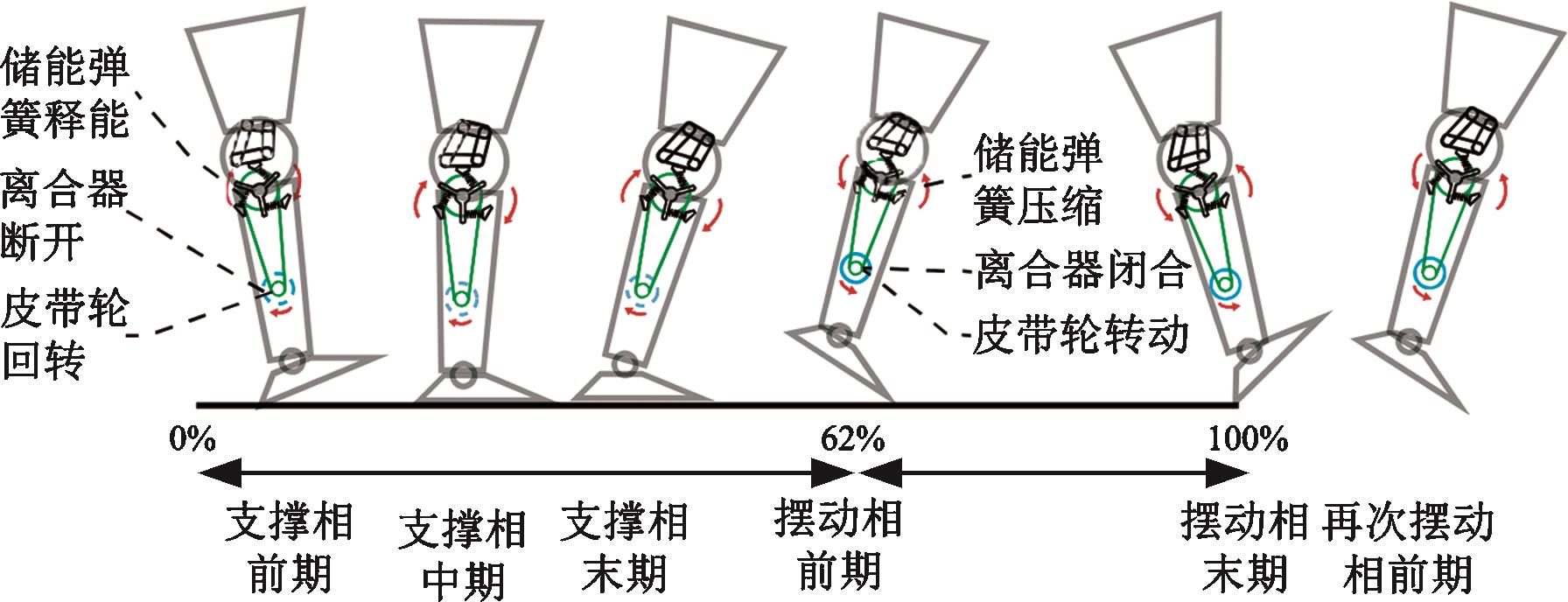
Fig.9 Principle of exoskeleton assistance
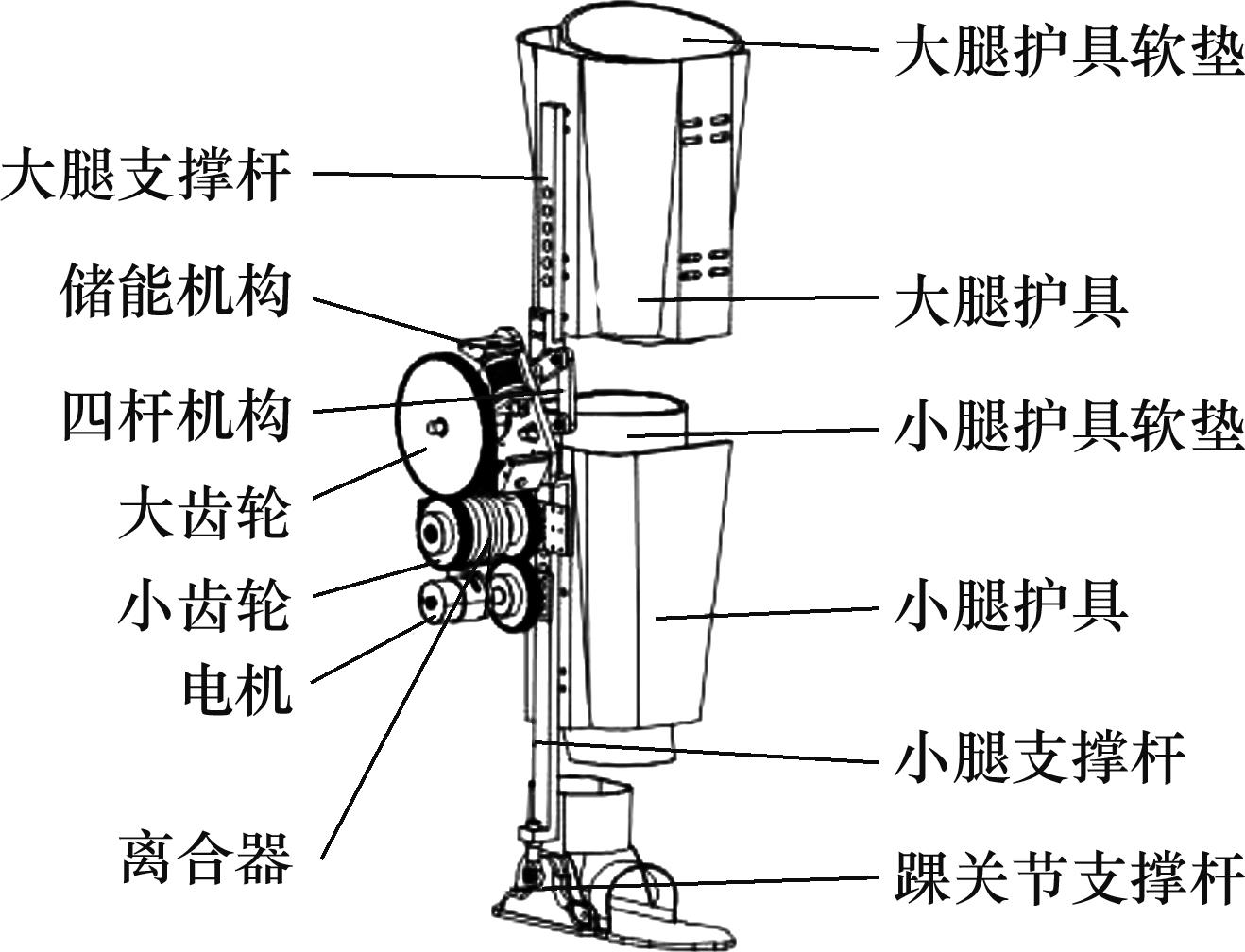
Fig.10 Integral structure design of exoskeleton
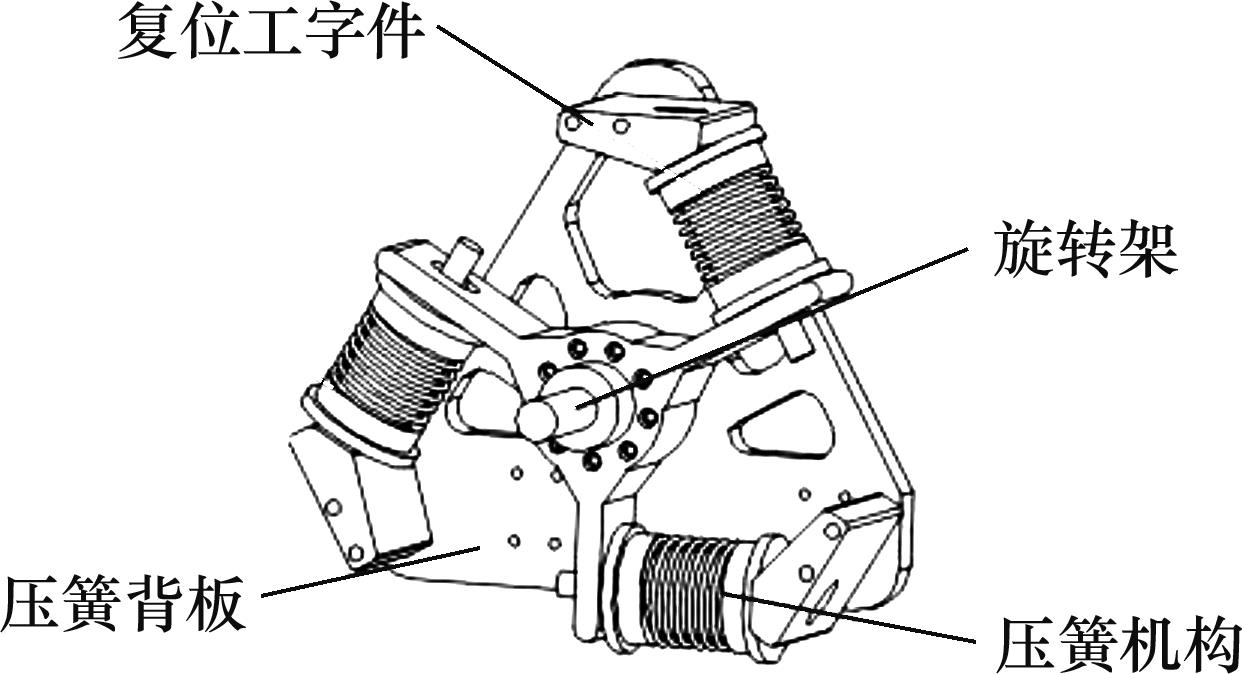
Fig.11 Design of energy storage mechanism
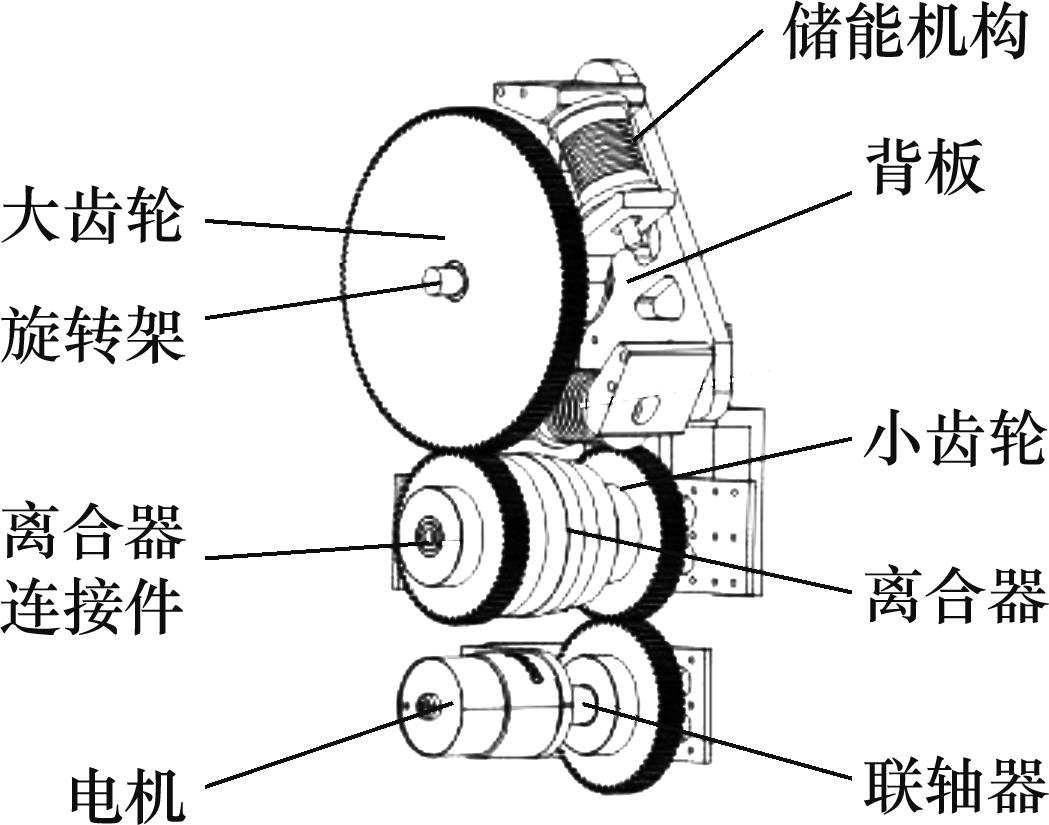
Fig.12 Motor clutch and transmission mechanism
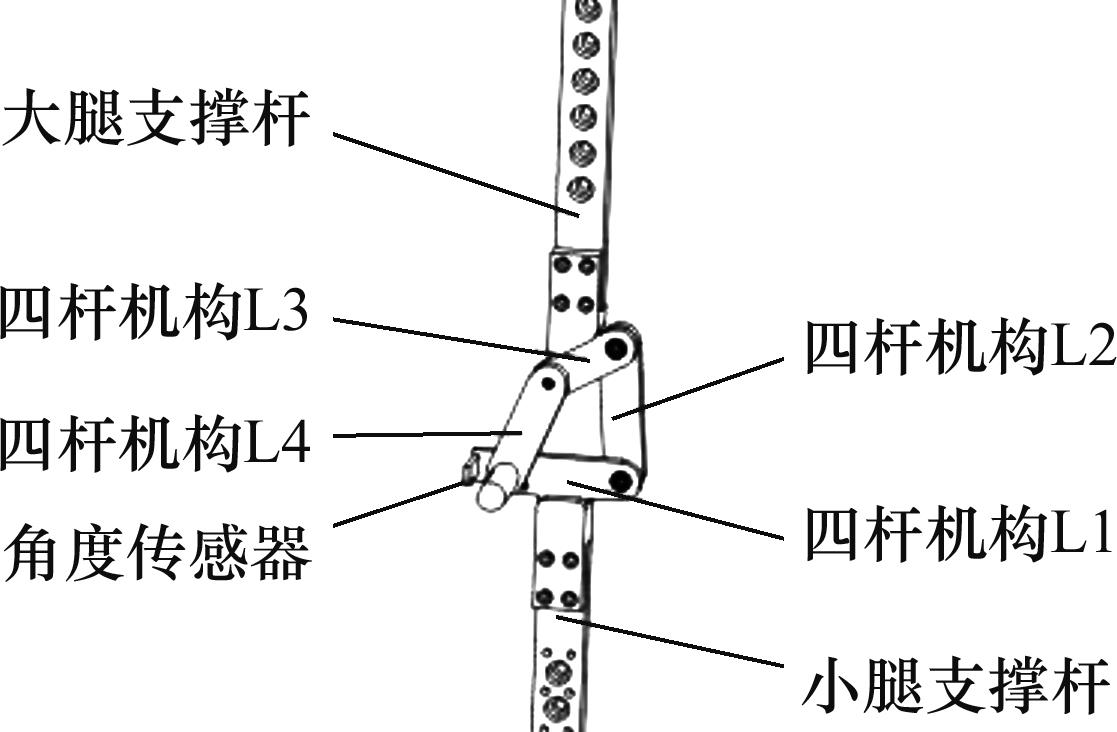
Fig.13 Design of four-bar linkage mechanism
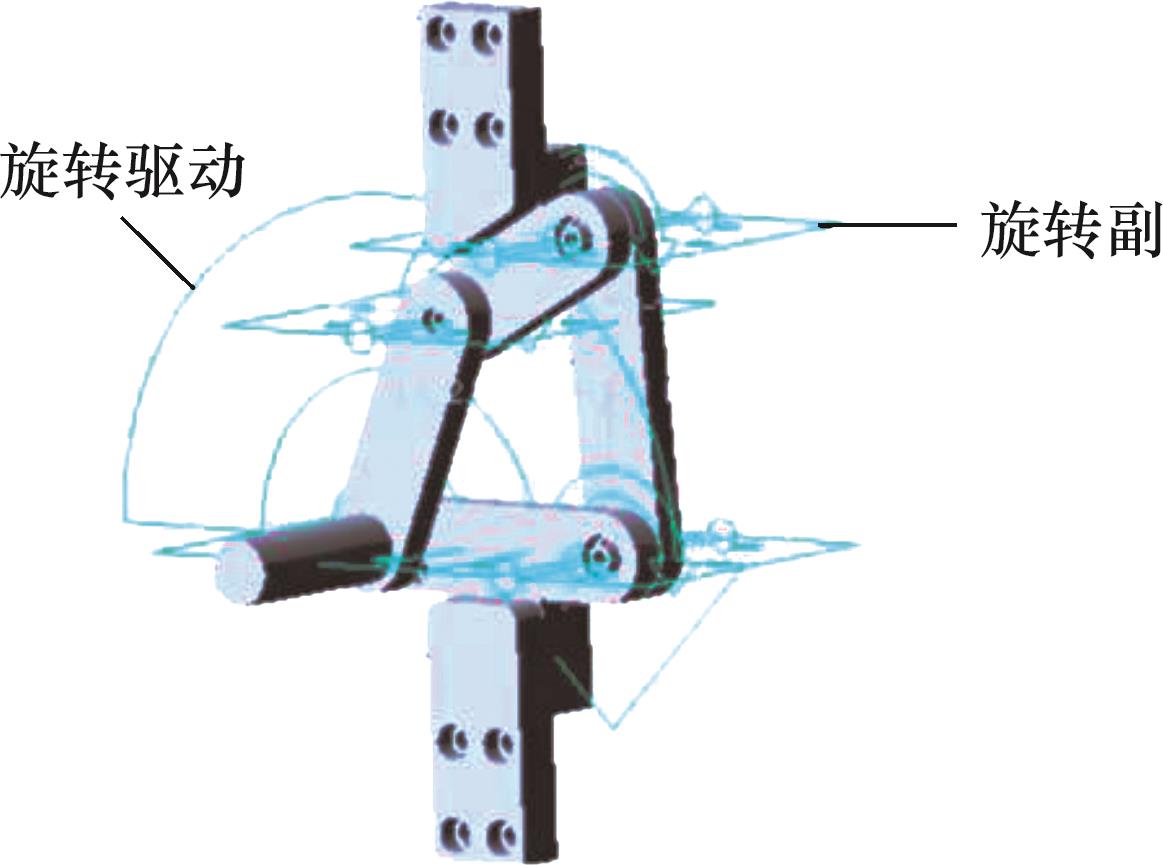
Fig.14 ADAMS added constraint diagram
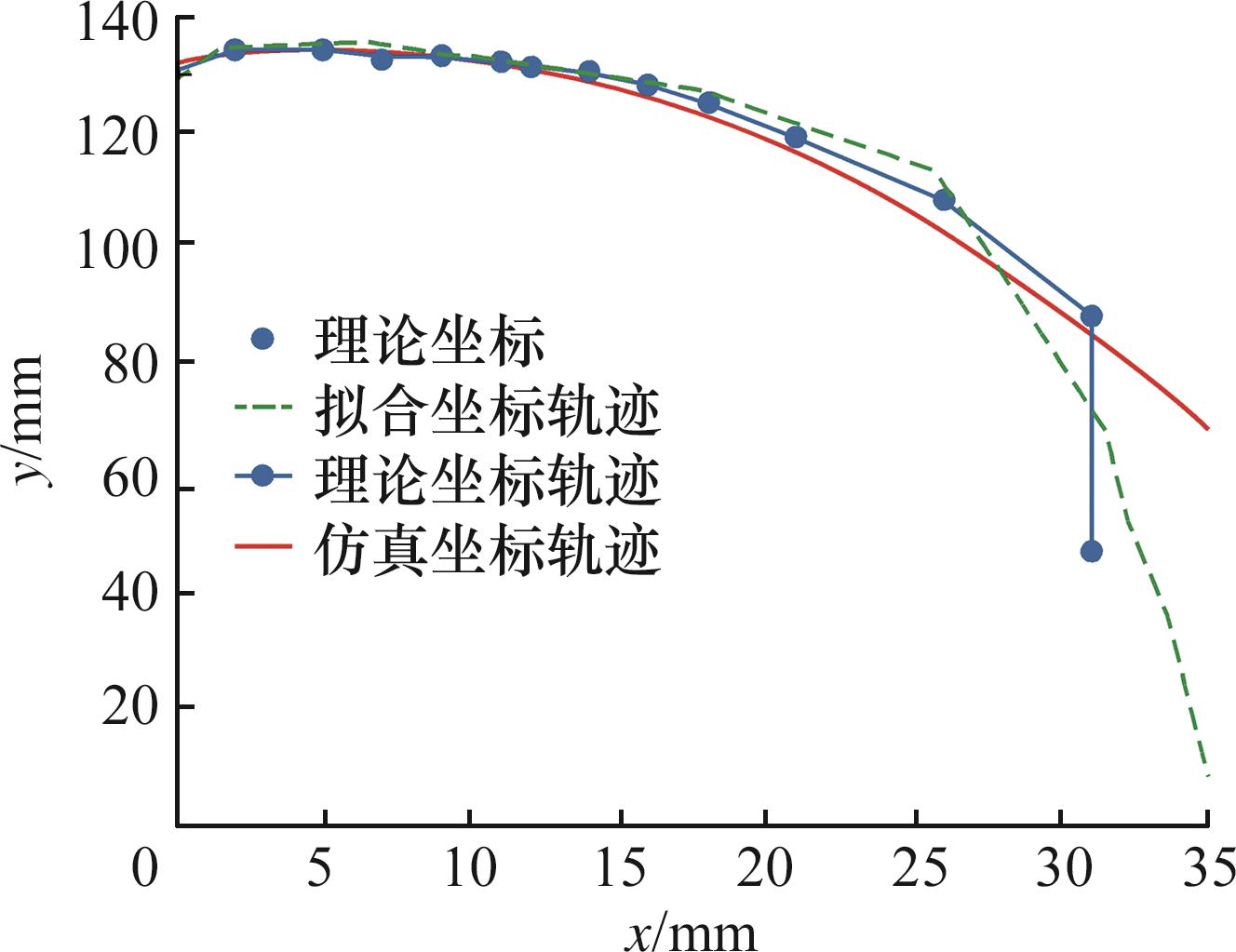
Fig.15 Comparison of three coordinate trajectories
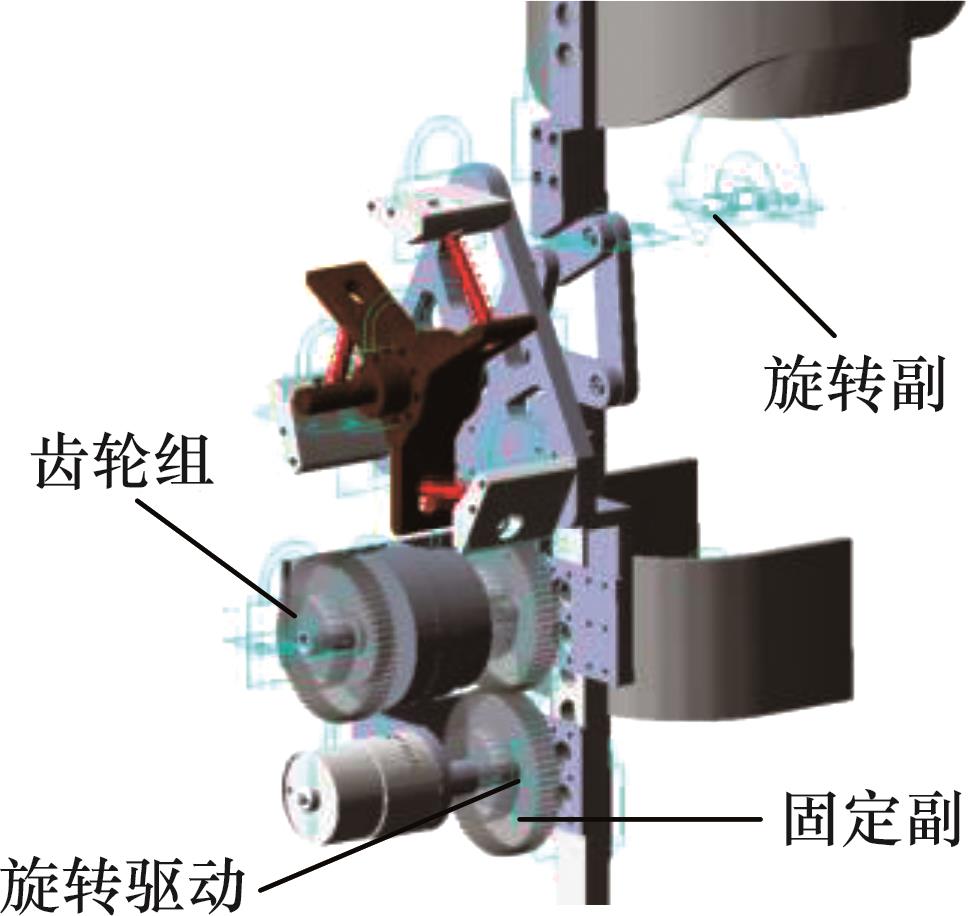
Fig.16 Exoskeleton connection pair
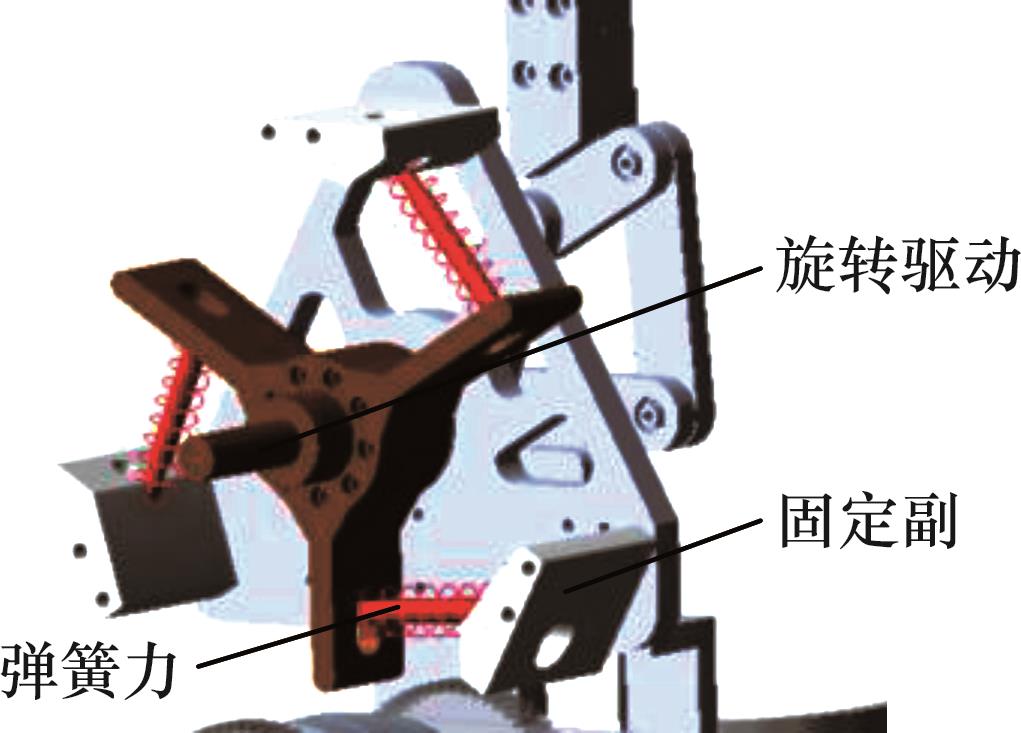
Fig.17 Spring force replacing compression spring group
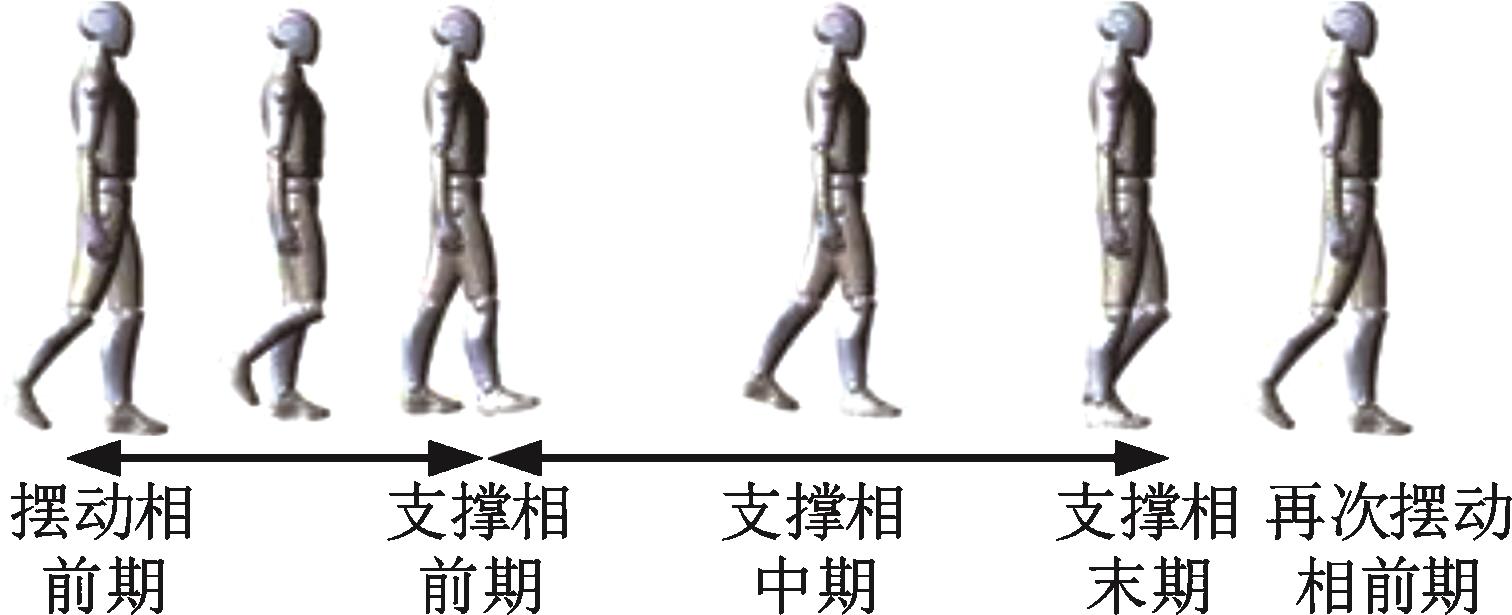
Fig.18 Gait cycle of human simulation model
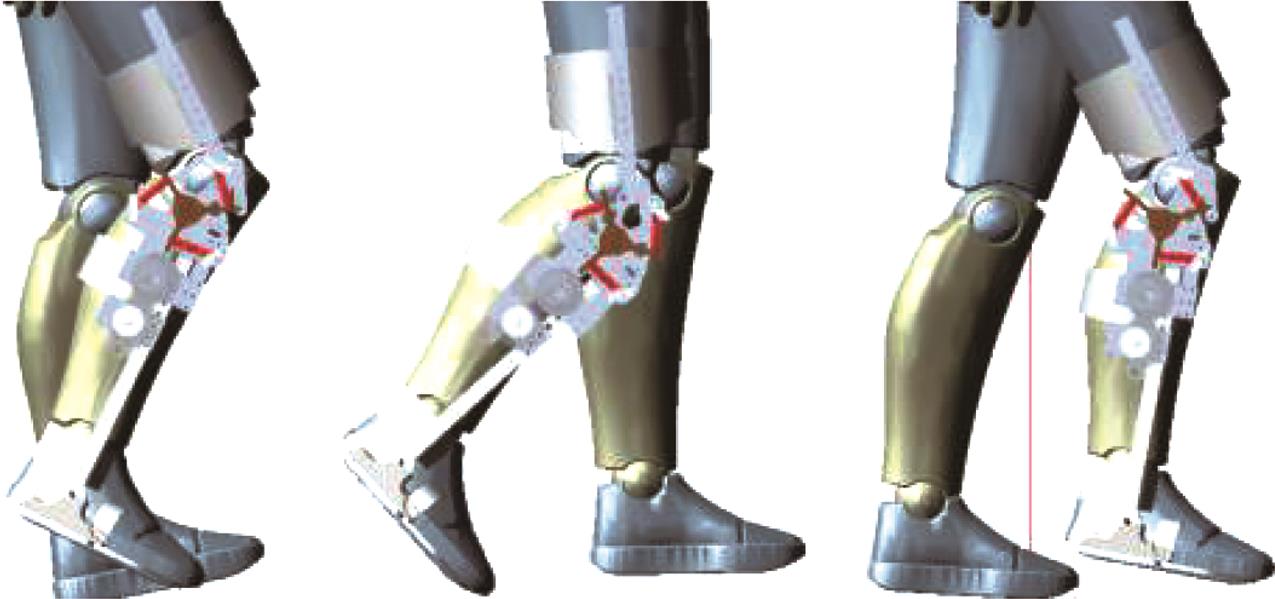
Fig.19 Human-machine coupling simulation model
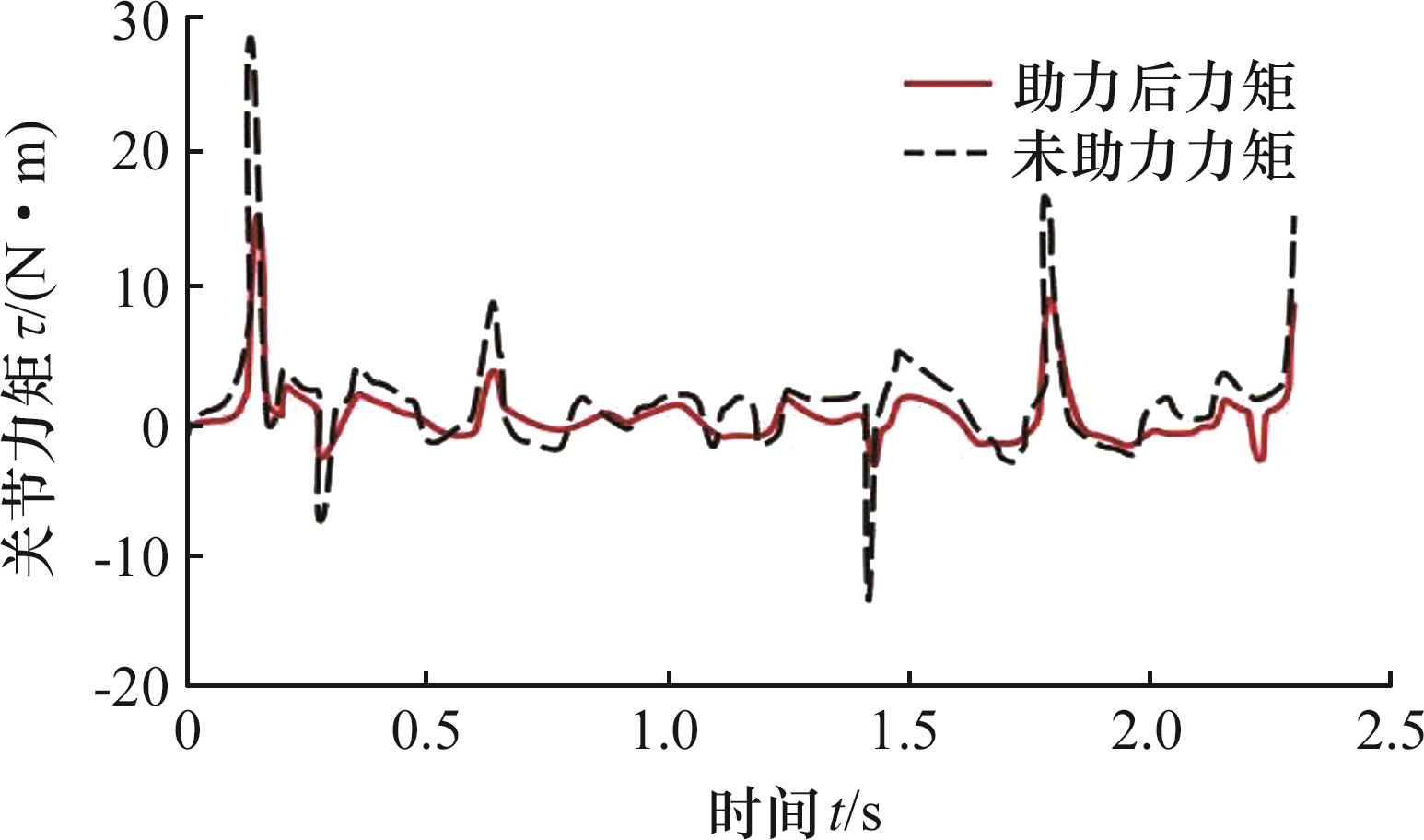
Fig.20 Comparison of knee torque before and after assistance
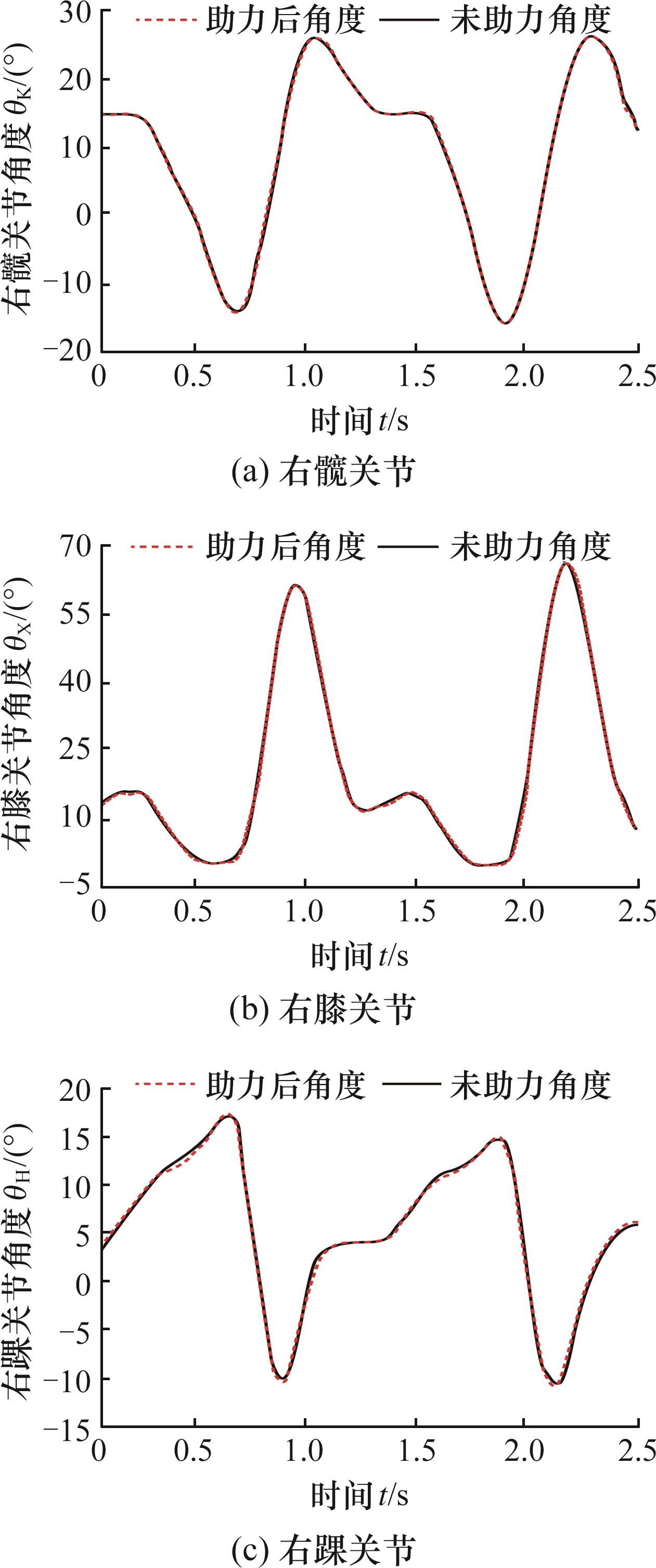
Fig.21 Comparison of joint angles before and after wearing exoskeleton
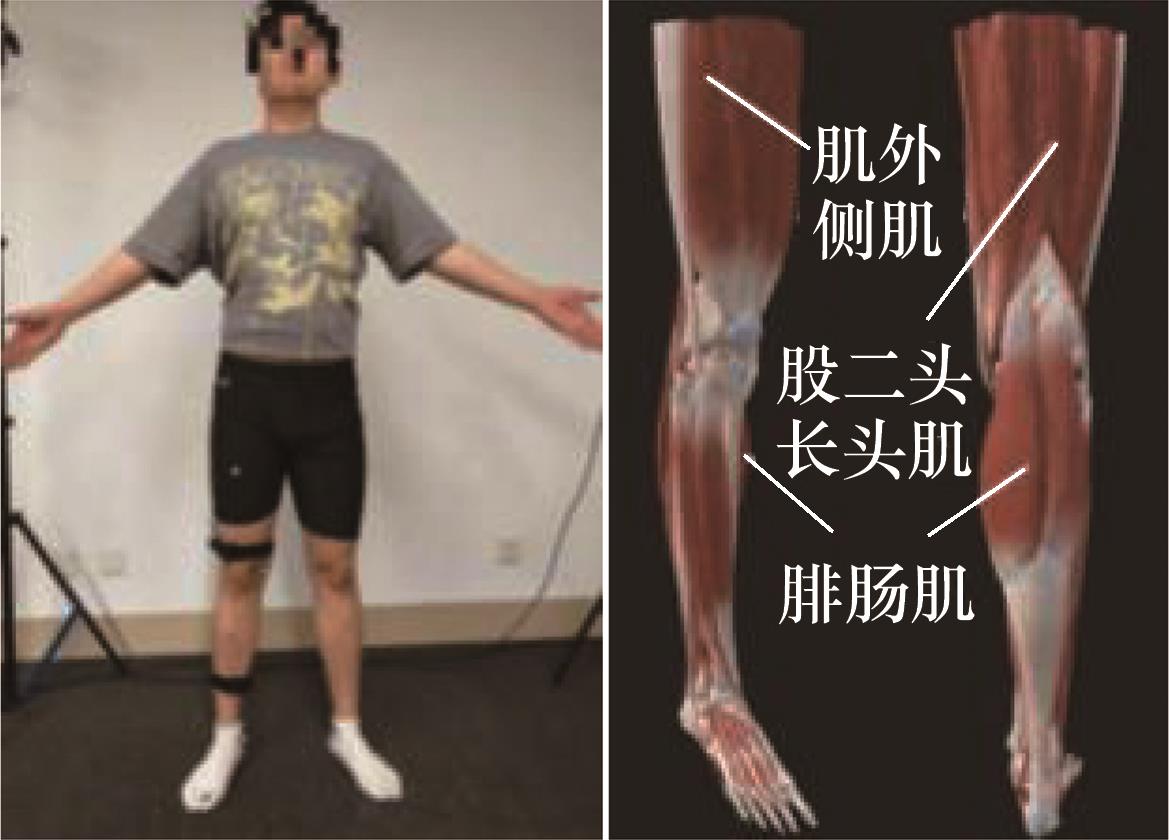
Fig.22 Marker and EMG block positions
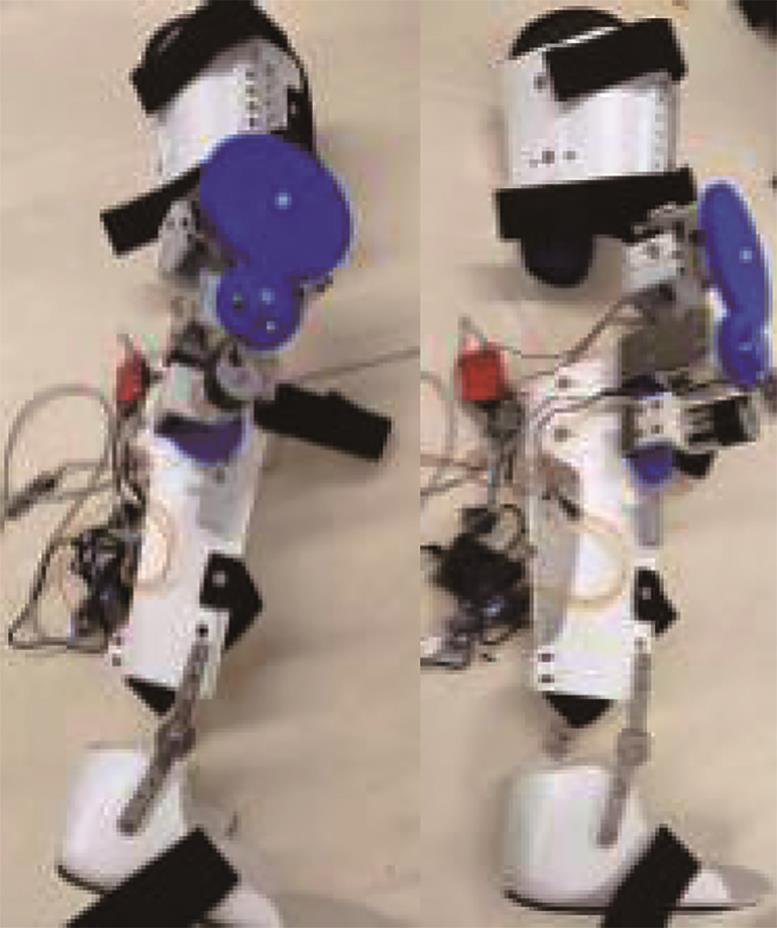
Fig.23 Exoskeleton entity model

Fig.24 Volunteers without wearing exoskeletons
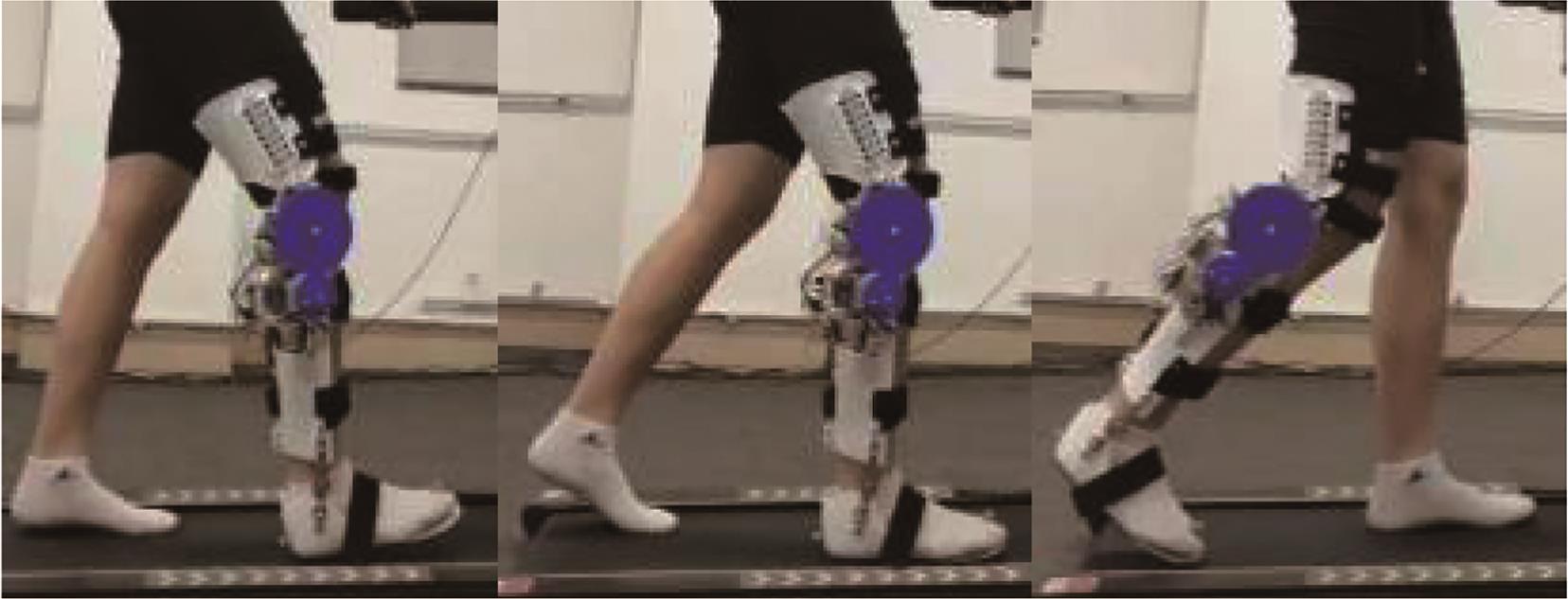
Fig.25 Experimental state of wearing exoskeleton assistance
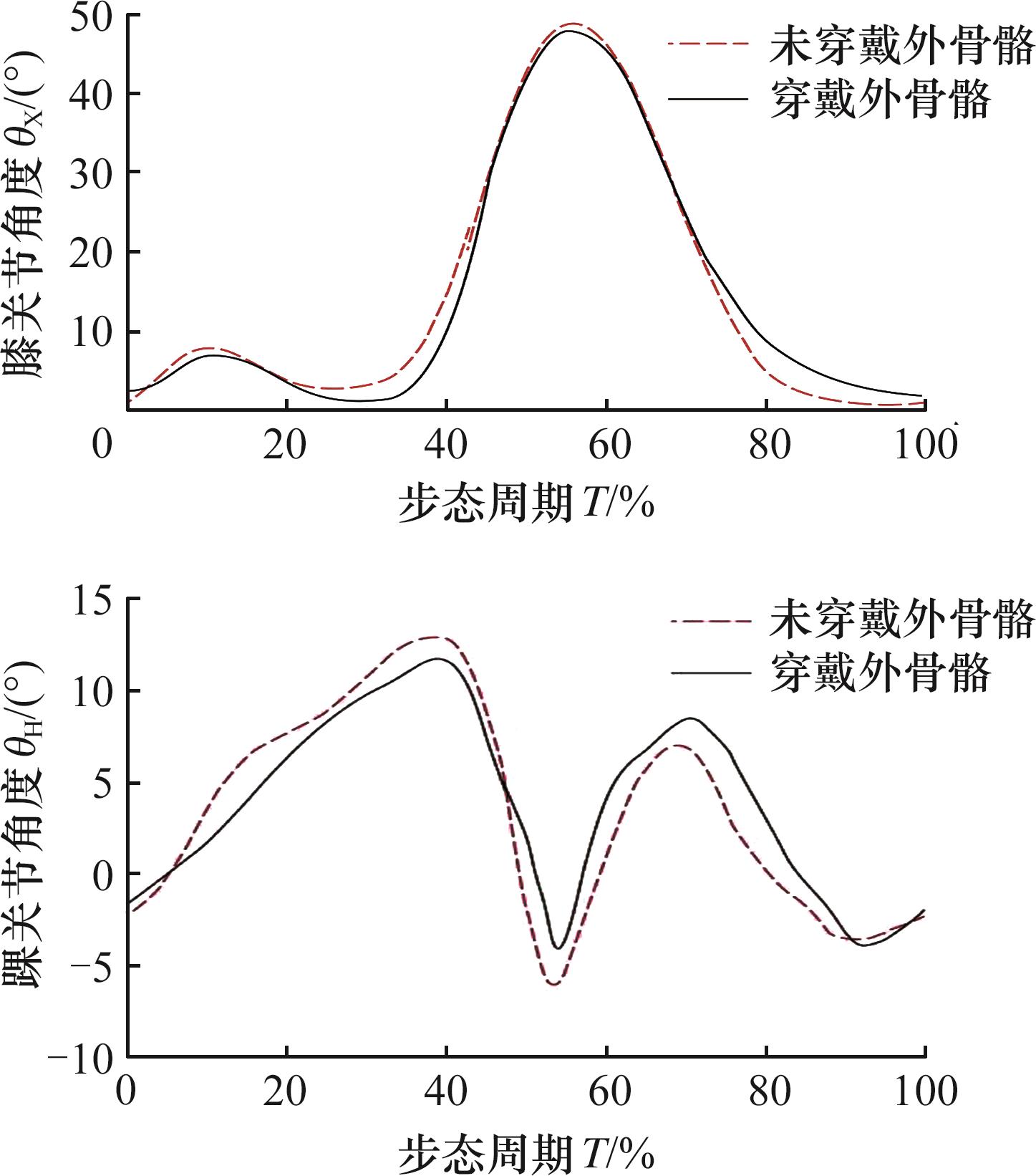
Fig.26 Knee and ankle angles before and after wearing the exoskeleton
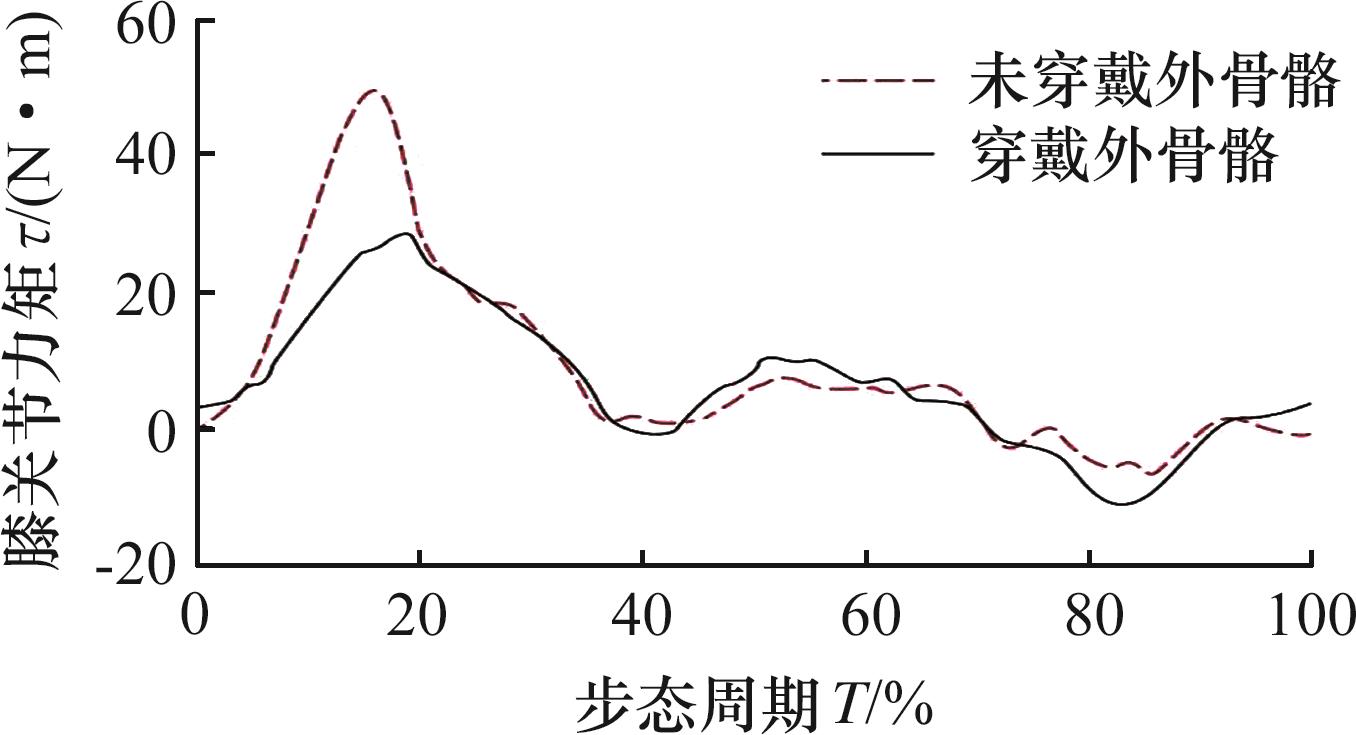
Fig.27 Knee moment before and after wearing exoskeleton
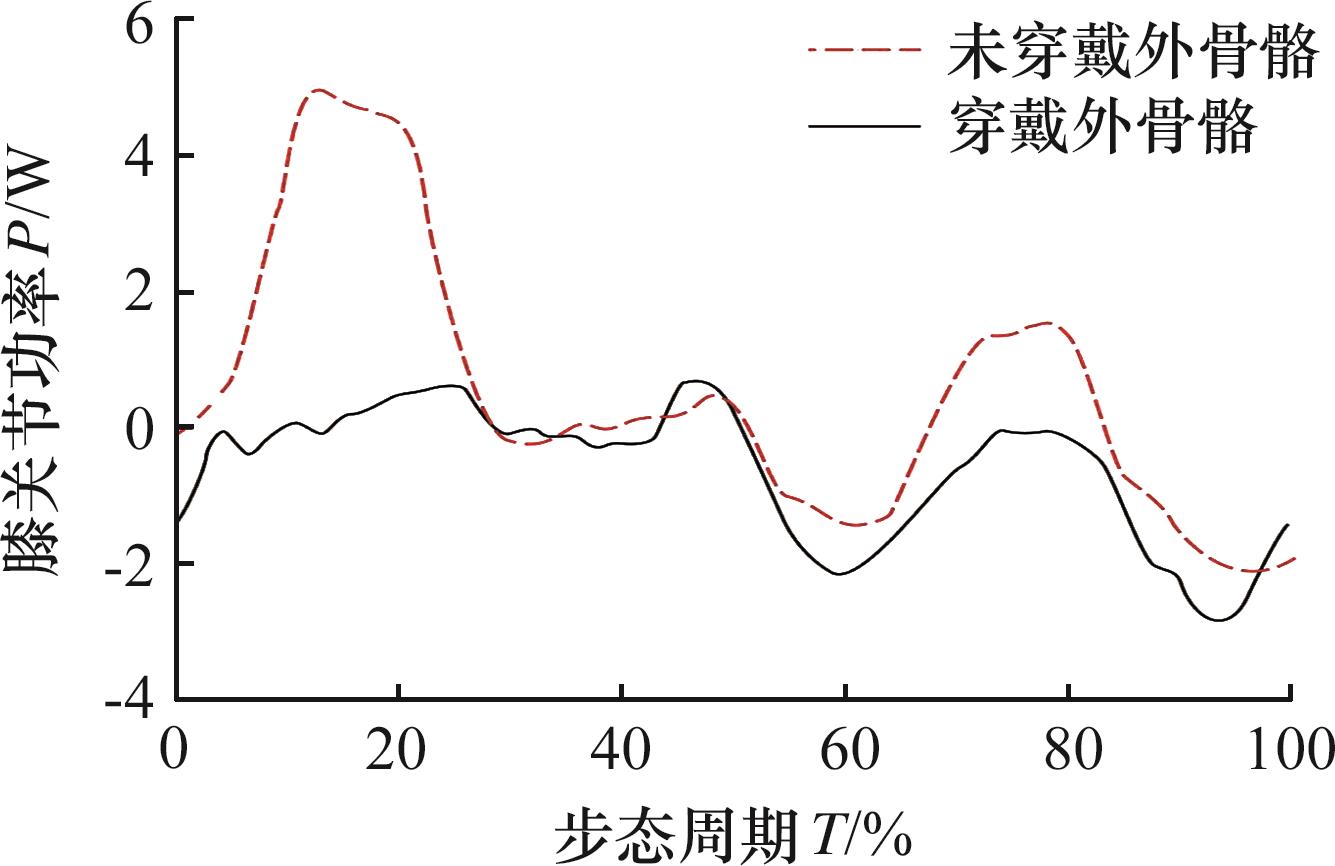
Fig.28 Knee power before and after wearing exoskeleton
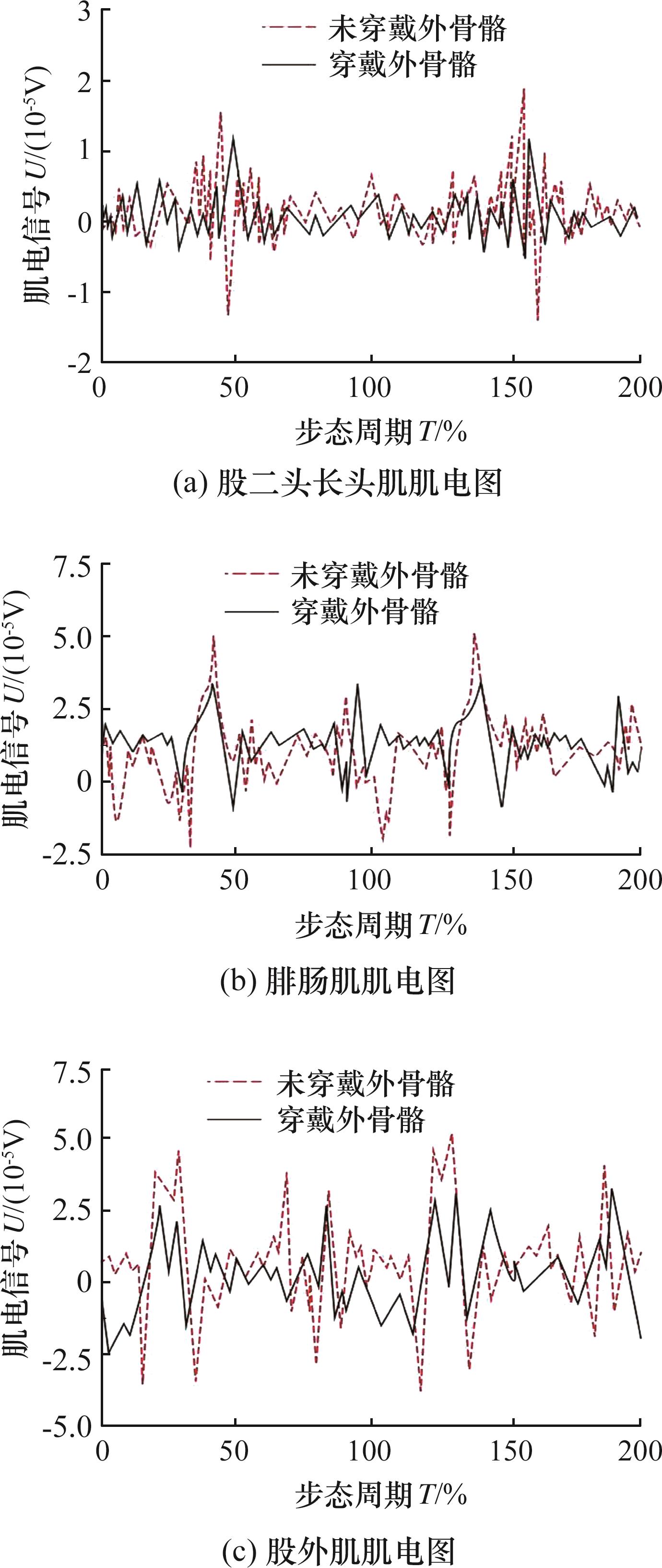
Fig.29 Comparison of EMG signals before and after wearing exoskeleton
| [1] | 陈鹰, 杨灿军.人体智能系统理论与方法[M]. 杭州 :浙江大学出版社, 2006. |
| CHEN Ying, YANG Canjun. Theory and Methods of Human Intelligent Systems[M]. Hangzhou:Zhejiang University Press, 2006. | |
| [2] | LERNER Z F, GASPARRI G M, BAIR M O, et al. An Untethered Ankle Exoskeleton Improves Walking Economy in a Pilot Study of Individuals with Cerebral Palsy[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018,26(10):1985-1993. |
| [3] | HIDAYAH R, XIN J, CHAMARTHY S, et al. Comparing the Performance of a Cable-driven Active Leg Exoskeleton (C-ALEX) Over-ground and on a Treadmill[C]∥7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob). Netherland, 2018:299-304. |
| [4] | KWON J, PARK J H, KU S, et al. A Soft Wearable Robotic Ankle-foot-orthosis for Post-stroke Patients[J]. IEEE Robotics & Automation Letters,2019,4(3):2547-2552. |
| [5] | 杨业勤.基于柔绳互绞驱动原理的柔性下肢外骨骼机器人研究[D]. 哈尔滨:哈尔滨工业大学, 2021. |
| YANG Yeqin. Research on a Lightweight and Portable Lower Limb Exosuit Based on Twisted Strings Actuator[D]. Harbin:Harbin Institute of Technology, 2021. | |
| [6] | 刘洋.基于绳-滑轮机构的欠驱动下肢外骨骼研究[D]. 哈尔滨:哈尔滨工业大学,2018. |
| LIU Yang. Research on the Cable-pulley Underactuated Lower Limb Exoskeleton[D]. Harbin:Harbin Institute of Technology, 2018. | |
| [7] | 陈春杰.基于柔性传动的助力全身外骨骼机器人系统研究[D]. 深圳:中国科学院大学(中国科学院深圳先进技术研究院),2017. |
| CHEN Chunjie. Research on Power-assisted Full-body Exoskeleton Robotic System Based on Flexible Drive[D]. Shenzhen:Shenzhen Institutes of Advanced Technology (Chinese Academy of Sciences), 2017. | |
| [8] | 赵新刚,谈晓伟,张弼.柔性下肢外骨骼机器人研究进展及关键技术分析[J].机器人,2020,42(3):365-384. |
| ZHAO Xingang, TAN Xiaowei, ZHANG Bi. Development of Soft Lower Extremity Exoskeleton and Its Key Technologies:a Survey[J]. Robot,2020,42(3):365-384. | |
| [9] | 曹品.基于气动肌肉的柔性下肢外骨骼设计[D].西安:西南交通大学, 2021. |
| CAO Pin. Design of Flexible Lower Limb Exoskeleton Based on Pneumatic Muscle[D]. Xi'an:Southwest Jiaotong University, 2021. | |
| [10] | NASIRI R, AHMADI A, AHMADABADI M N. Reducing the Energy Cost of Human Running Using an Unpowered Exoskeleton[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering:a Publication of the IEEE Engineering in Medicine and Biology Society, 2018, 26(10):2026-2032. |
| [11] | WILIAN M S, GLAUCO A C, ADRIANO A S. Design and Control of an Active Knee Orthosis Driven by a Rotary Series Elastic Actuator[J]. Control Engineering Practice,2017,58:37-38. |
| [12] | 陈朝峰,杜志江,张慧,等.基于柔性驱动关节的下肢外骨骼双模态切换控制[J].机器人,2021,43(5):513-525. |
| CHEN Chaofeng, DU Zhijiang, ZHANG Hui, et al. Double-mode Switching Control of a Lower Limb Exoskeleton Based on Flexible Drive Joint[J]. Robot, 2021,43(5):513-525. | |
| [13] | FUGE A, HERRON C, BEITER B, et al. Design, Development, and Analysis of the Lower Body of Next-generation 3D-printed Humanoid Research Platform:PANDORA[J]. Robotica 2023, 41:2177-2206. |
| [14] | SUN Z, LI Y, ZI B, et al. Design, Modeling, and Evaluation of a Hybrid Driven Knee-ankle Orthosis with Shape Memory Alloy Actuators[J]. Journal of Mechanical Design,2023,145(6):063301. |
| [15] | HAO Z X, LENG H J, QU C Y, et al. Biomechanics of the Bone and the Joint[J]. Chinese Journal of Solid Mechanics, 2010, 31(6):603-612. |
| [16] | CHAICHAOWARAT R, KINUGAWA J, KOSUGE K. Unpowered Knee Exoskeleton Reduces Quadriceps Activity during Cycling[J]. Engineering,2018,4(4),471-478. |
| [17] | WANG D, LEE K M, GUO J J, et al. Adaptive Knee Joint Exoskeleton Based on Biological Geometries[J]. IEEE/ASME Trans. Mechatron,2014, 19(4):1268-1278. |
| [18] | WOLF A. Instantaneous Screws of Weight-bearing Knee:What Can the Screws Tell Us about the Knee Motion[J]. Journal of Biomechanical Engineering, 2014, 136(7):433-440. |
| [19] | CHEN J T, YANG L F, WANG Y X, et al. The New Simulated Knee Prosthesis of Discontinuity Instantaneous Center Curve[J]. Machinery Design & Manufacture,2014,281:183-185. |
| [20] | CHOI B, LEE Y, KIM J, et al. A Self-aligning Knee Joint for Walking Assistance Devices[C]∥ In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). Orlando, FL, 2016:2222-2227. |
| [21] | ZHANG L, LIU G, HAN B,et al. Assistive Devices of Human Knee Joint:a Review[J]. Robotics and Autonomous Systems, 2020, 125:103394. |
| [1] | WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2885-2893. |
| [2] | ZHAO Lijuan1, 2, BAI Zhongjian1, XIE Bo3, LIN Guocong1, WANG Tianxiang1, GAO Feng3, LIU Zifeng3. Study of Mechanical Characteristics of Soft Electrical Cables in Mining Machines [J]. China Mechanical Engineering, 2025, 36(02): 359-368. |
| [3] | ZHU Yulong, ZHAO Yingsong, FANG Yang, CHEN Hongen, CHEN Zhenmao, . Rotating Eddy Current Testing for Inspection of Cracks at Hole Edge [J]. China Mechanical Engineering, 2023, 34(08): 883-891. |
| [4] |
XIANG Chang-Le, FU Sheng-Beng.
Research on Simulation of Vehicle Integrated Transmission System and Experimental Validation
[J]. China Mechanical Engineering, 2011, 22(1): 106-110,125.
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||