

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (10): 2274-2283.DOI: 10.3969/j.issn.1004-132X.2025.10.014
Previous Articles Next Articles
Liangliang YANG( ), Hong CHEN, Wenqi LU
), Hong CHEN, Wenqi LU
Received:2024-09-25
Online:2025-10-25
Published:2025-11-05
Contact:
Liangliang YANG
杨亮亮(), 陈泓, 鲁文其
通讯作者:
杨亮亮
作者简介:杨亮亮*(通信作者),男,1978年生,副教授。研究方向为高速高精运动控制。E-mail:yangliangliang@zstu.edu.cn。
基金资助:CLC Number:
Liangliang YANG, Hong CHEN, Wenqi LU. Kernel Regularization Optimal Iterative Learning Control Based on Trajectory Learning under Actuator Constraints[J]. China Mechanical Engineering, 2025, 36(10): 2274-2283.
杨亮亮, 陈泓, 鲁文其. 执行器约束下基于轨迹学习的核正则化最优迭代学习控制[J]. 中国机械工程, 2025, 36(10): 2274-2283.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.10.014

Fig.1 Control block diagram of the servo system
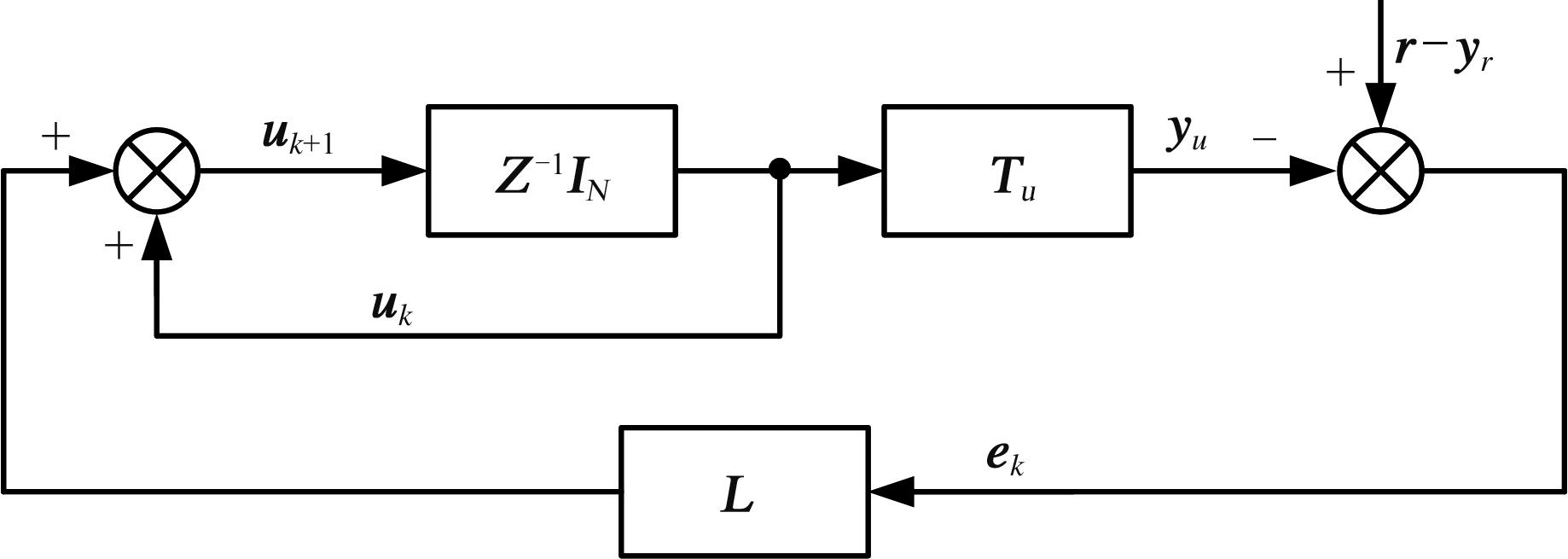
Fig.2 Block diagram of ILC
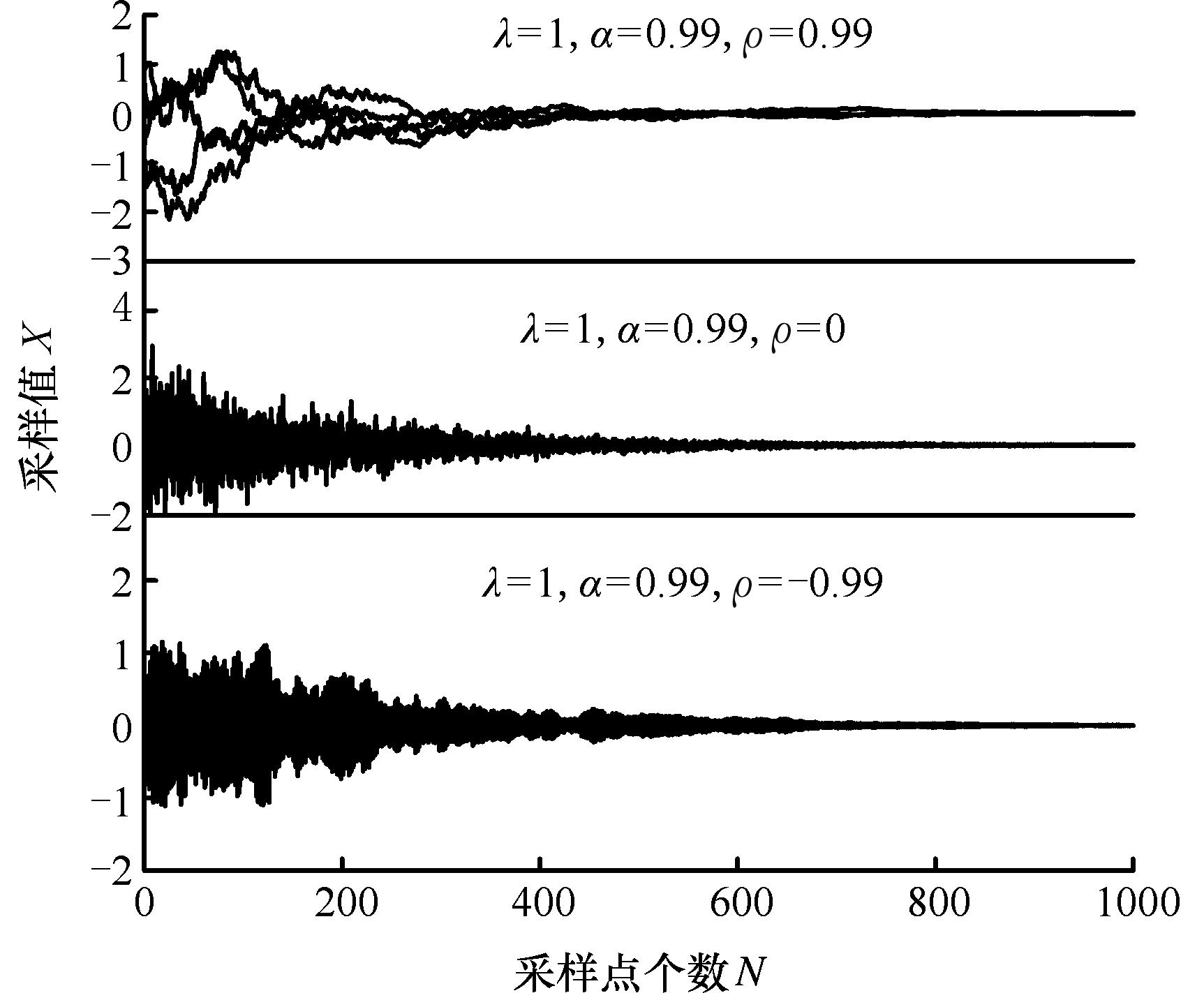
Fig.3 Zero-mean GPR with DC kernel
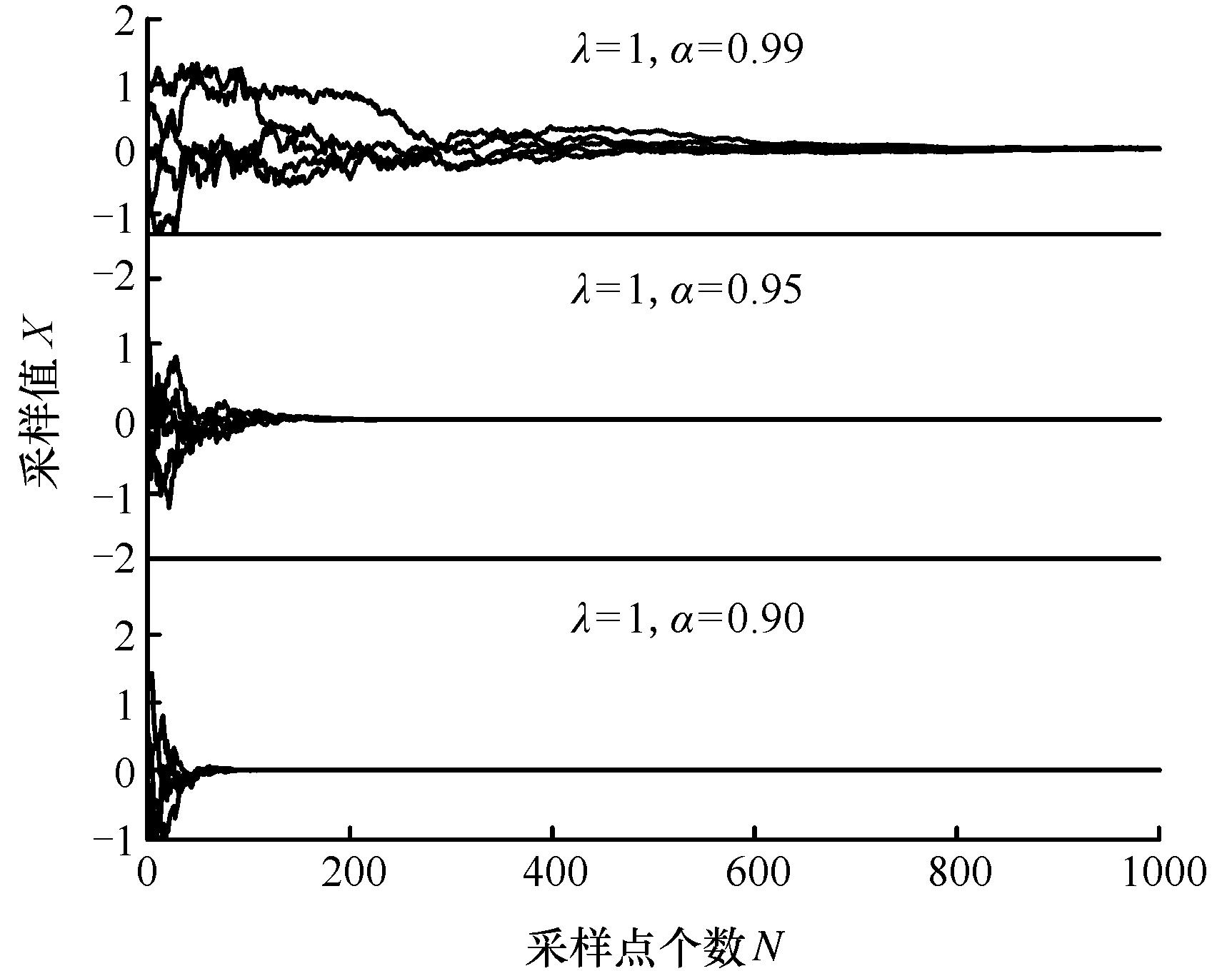
Fig.4 Zero-mean GPR with TC kernel
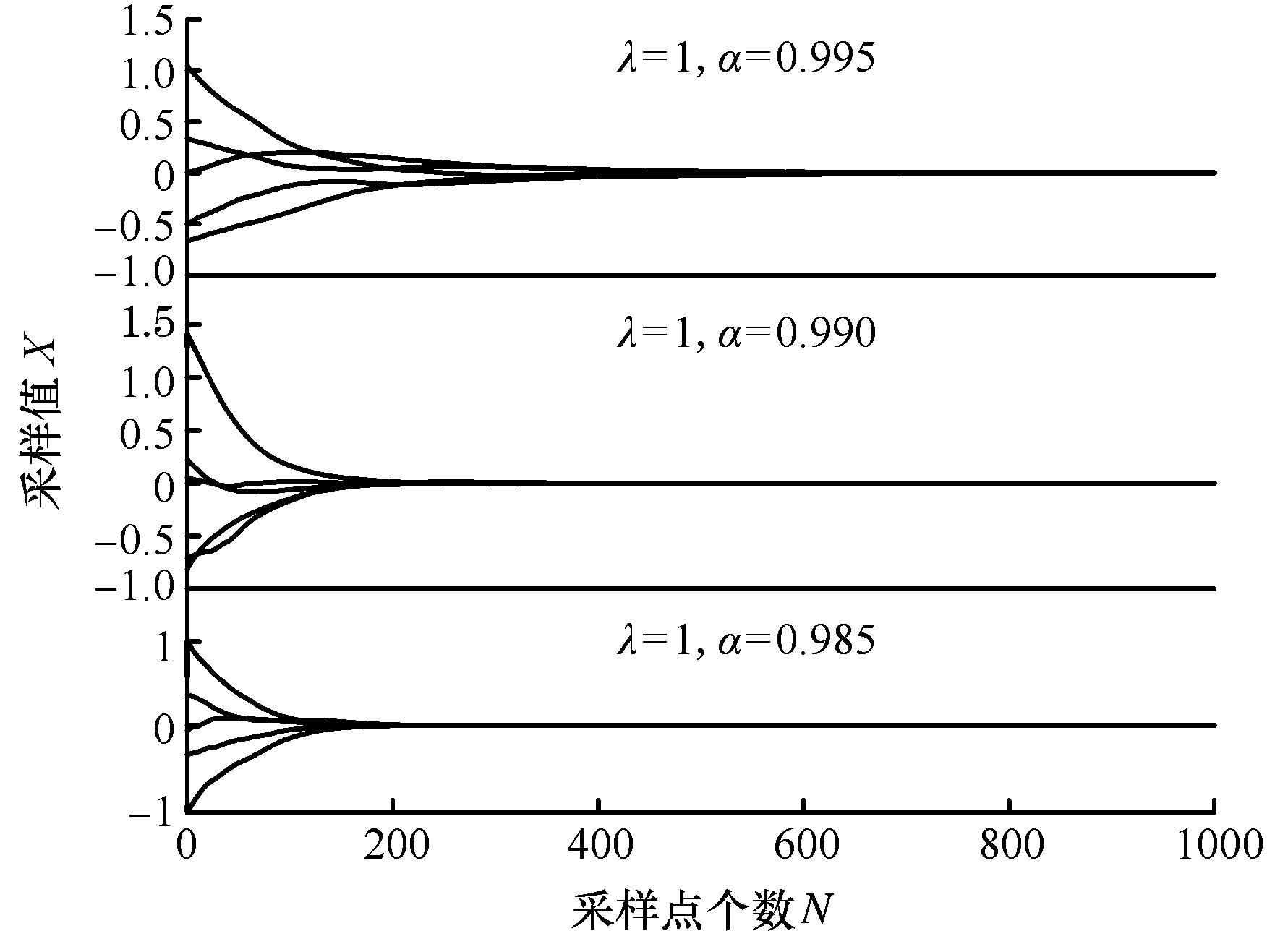
Fig.5 Zero-mean GPR with SS kernel
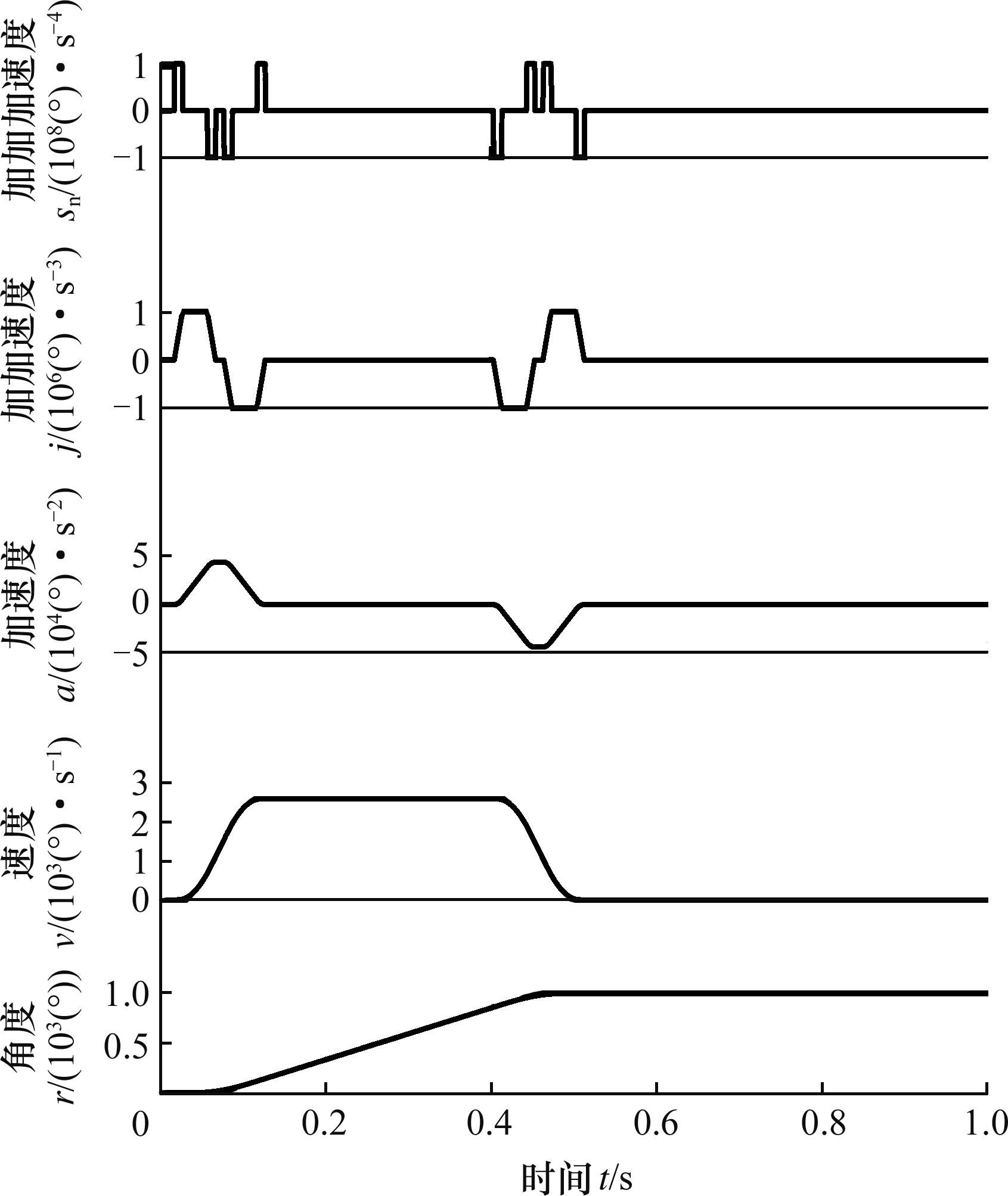
Fig.6 Fourth-order S-curve point-to-point trajectory
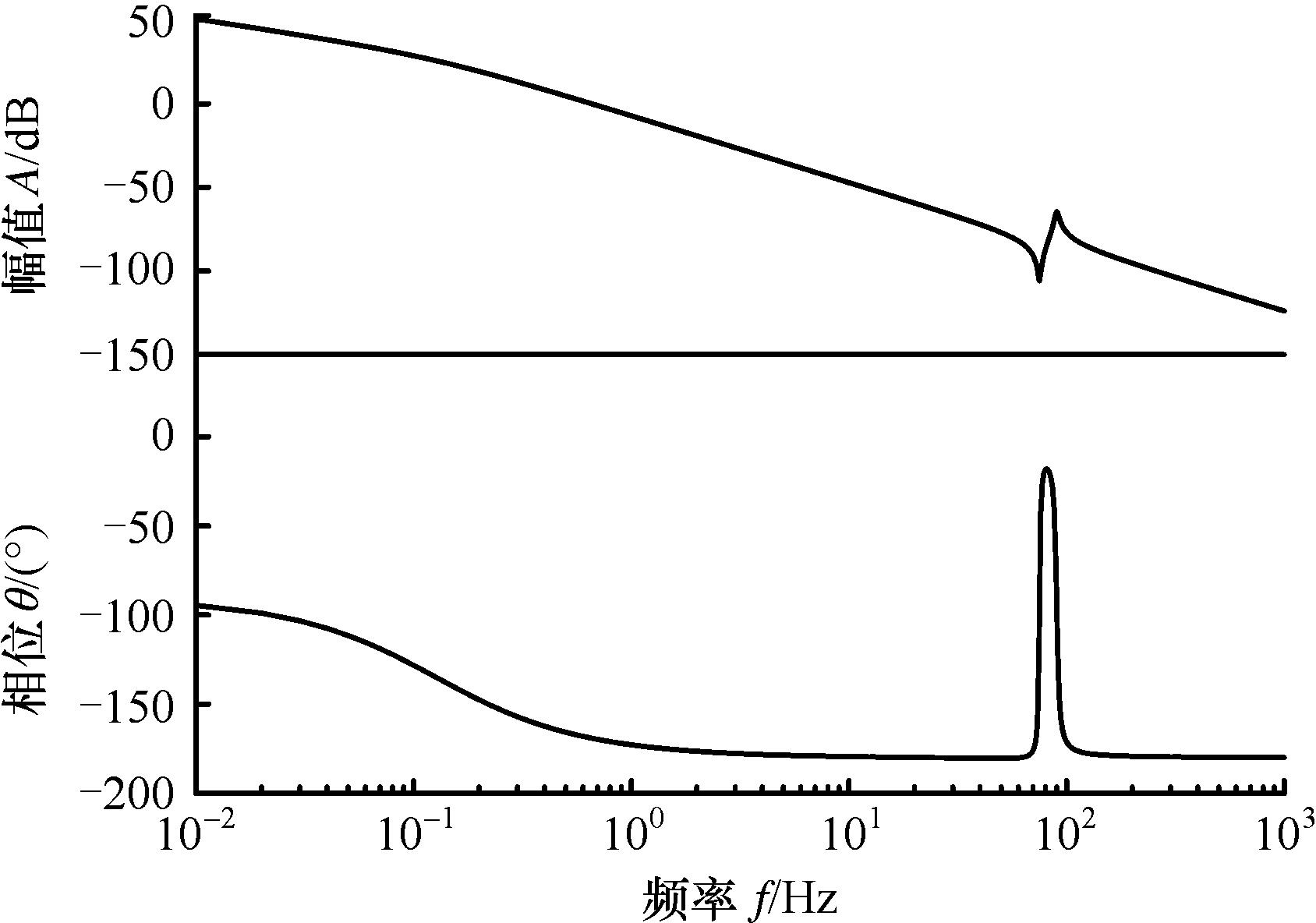
Fig.7 Bode plot of simulation model
| DDOILC | KROILC | |||
|---|---|---|---|---|
| DC | TC | SS | ||
| MSE | ||||
| FIT | ||||
Tab.1 Comparison of identification performance
| DDOILC | KROILC | |||
|---|---|---|---|---|
| DC | TC | SS | ||
| MSE | ||||
| FIT | ||||
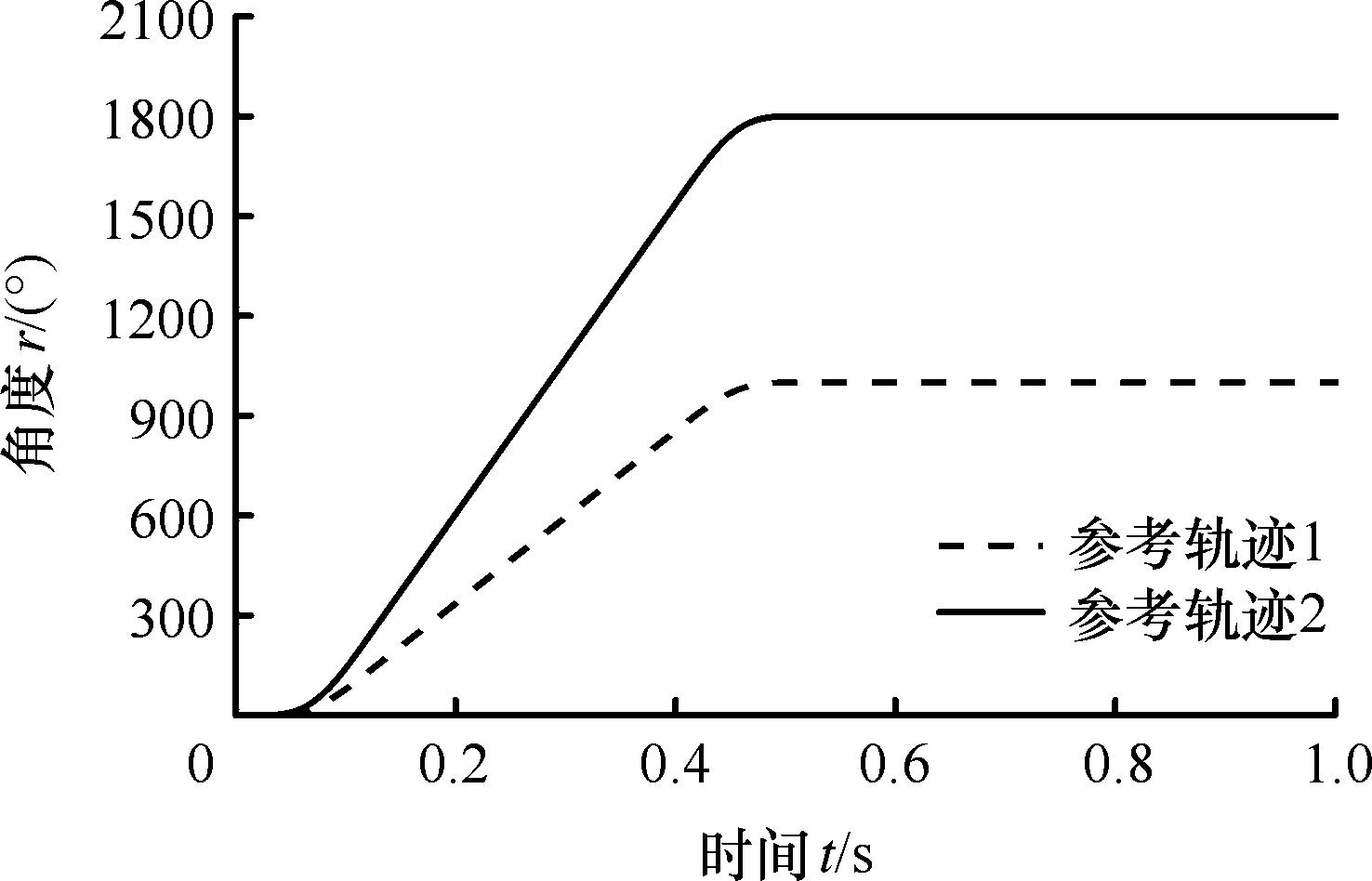
Fig.8 Reference trajectory 1 and reference trajectory 2
| vmax | amax | ||
|---|---|---|---|
| 轨迹1 | 1000° | 2590.7°/s | 43177.9°/s2 |
| 轨迹2 | 1800° | 4663.2°/s | 77720.2°/s2 |
| 变化率 | 80% | 80% | 80% |
Tab.2 Degree of trajectory parameter variation
| vmax | amax | ||
|---|---|---|---|
| 轨迹1 | 1000° | 2590.7°/s | 43177.9°/s2 |
| 轨迹2 | 1800° | 4663.2°/s | 77720.2°/s2 |
| 变化率 | 80% | 80% | 80% |
| 前馈信号加权系数 | 最大控制信号/ |
|---|---|
| 46.11 | |
| 45.85 | |
| 42.88 |
Tab.3 The maximum control signal under different ω when η = 2×10-7
| 前馈信号加权系数 | 最大控制信号/ |
|---|---|
| 46.11 | |
| 45.85 | |
| 42.88 |
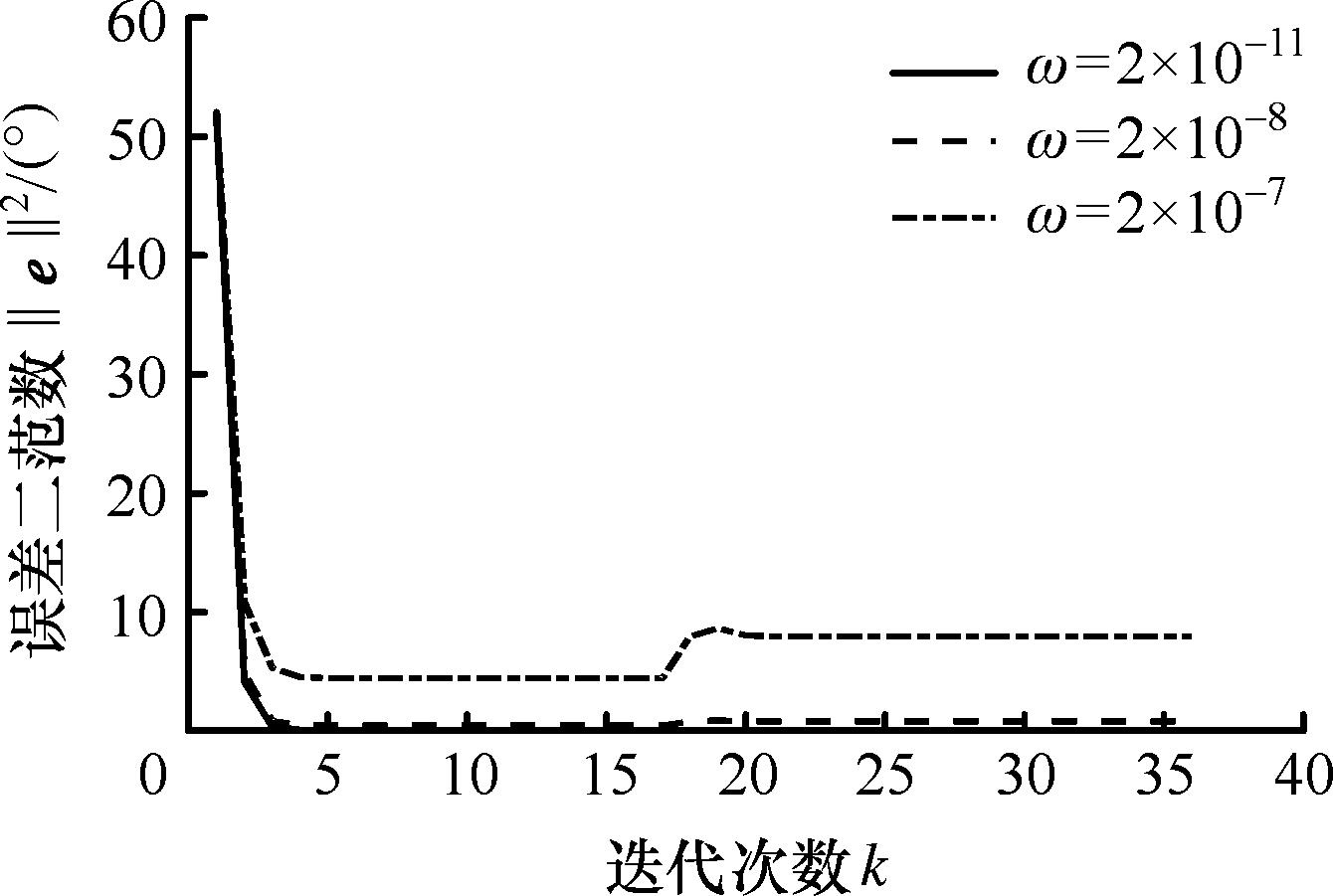
Fig.9 The influence of different ω on the 2-norm of the error when η = 2×10-7
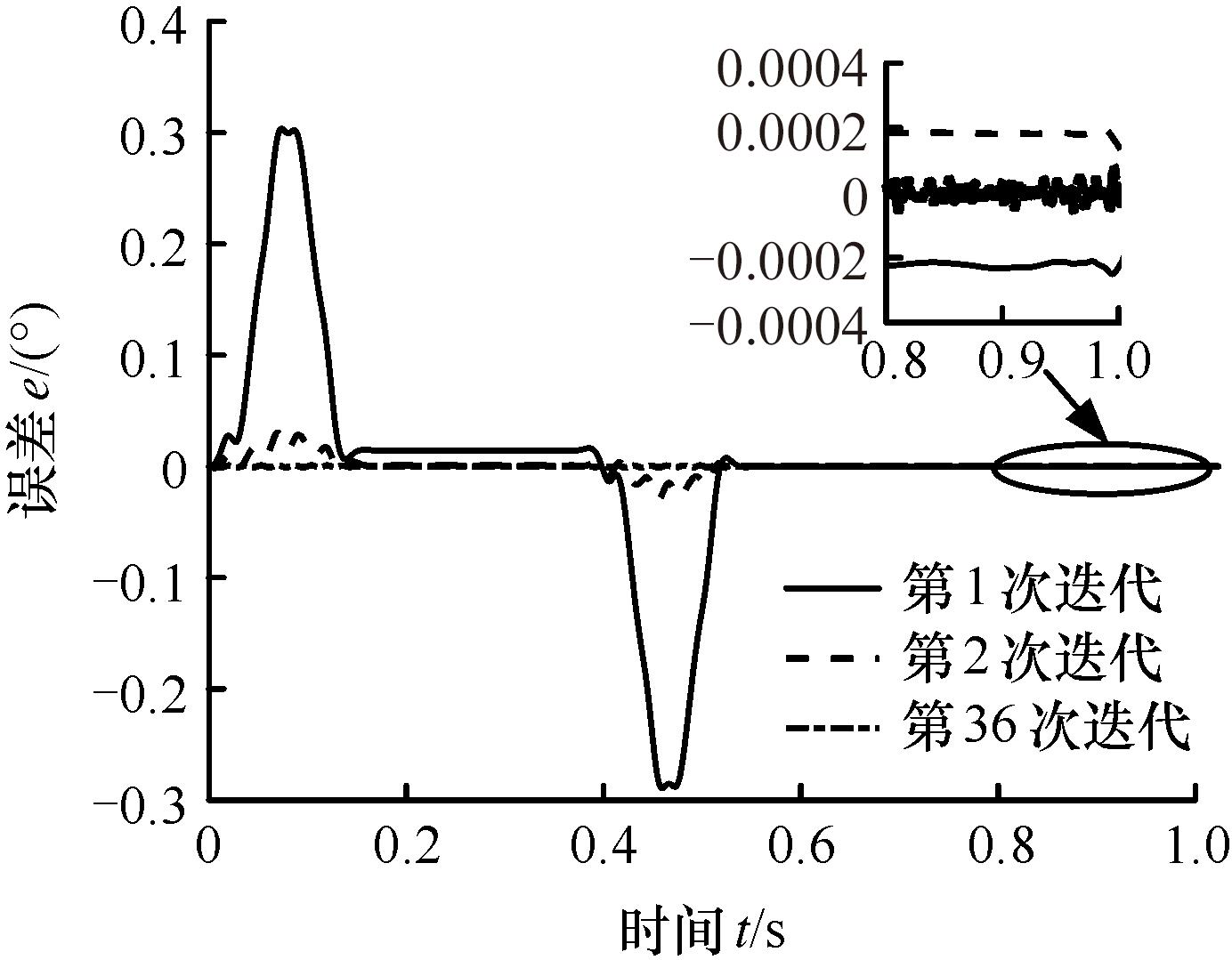
Fig.10 Full trajectory iterative error curve when ω = 2×10-11, η = 2×10-7
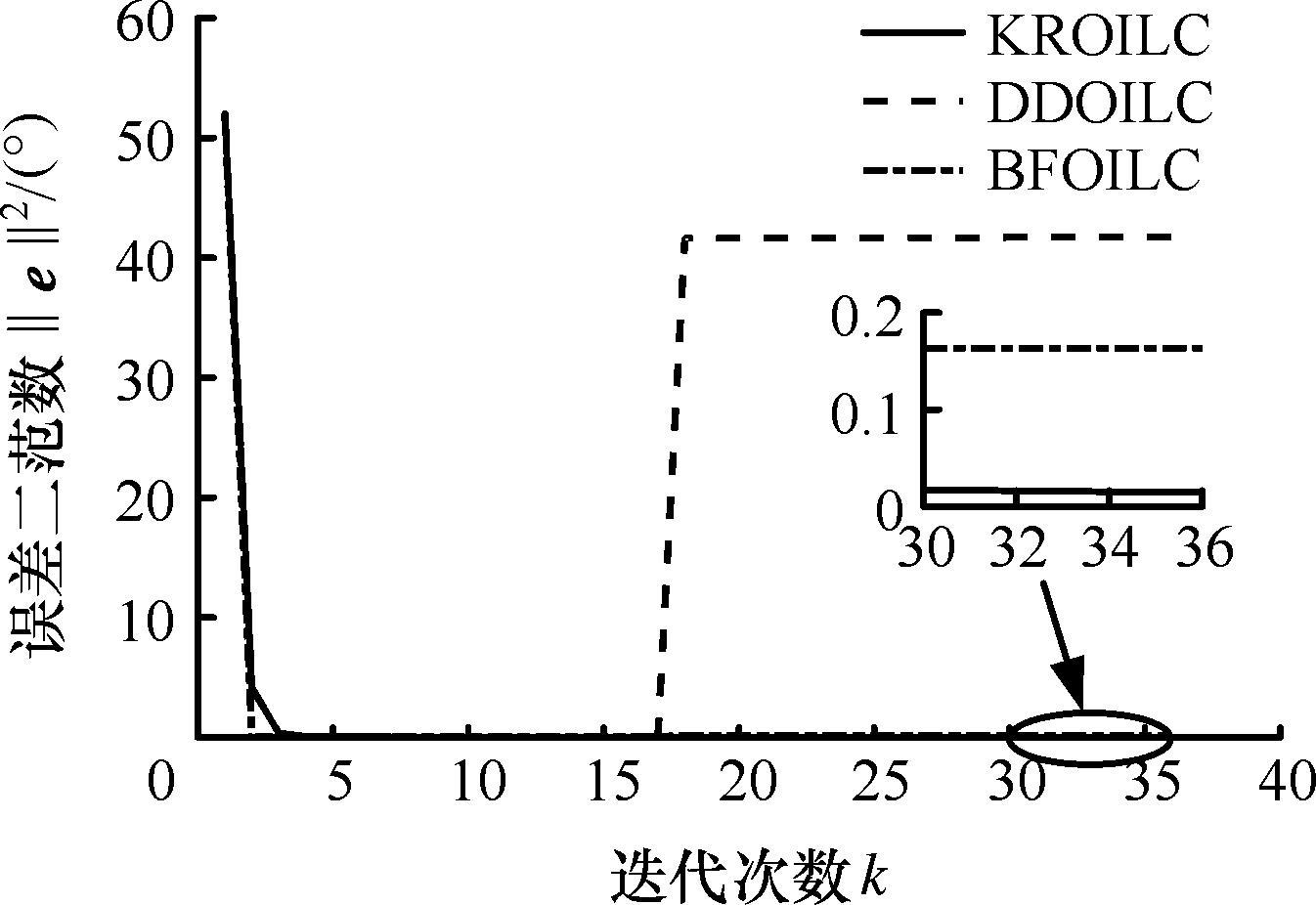
Fig.11 The 2-norm of the error for three algorithms in non-repetitive trajectory simulation
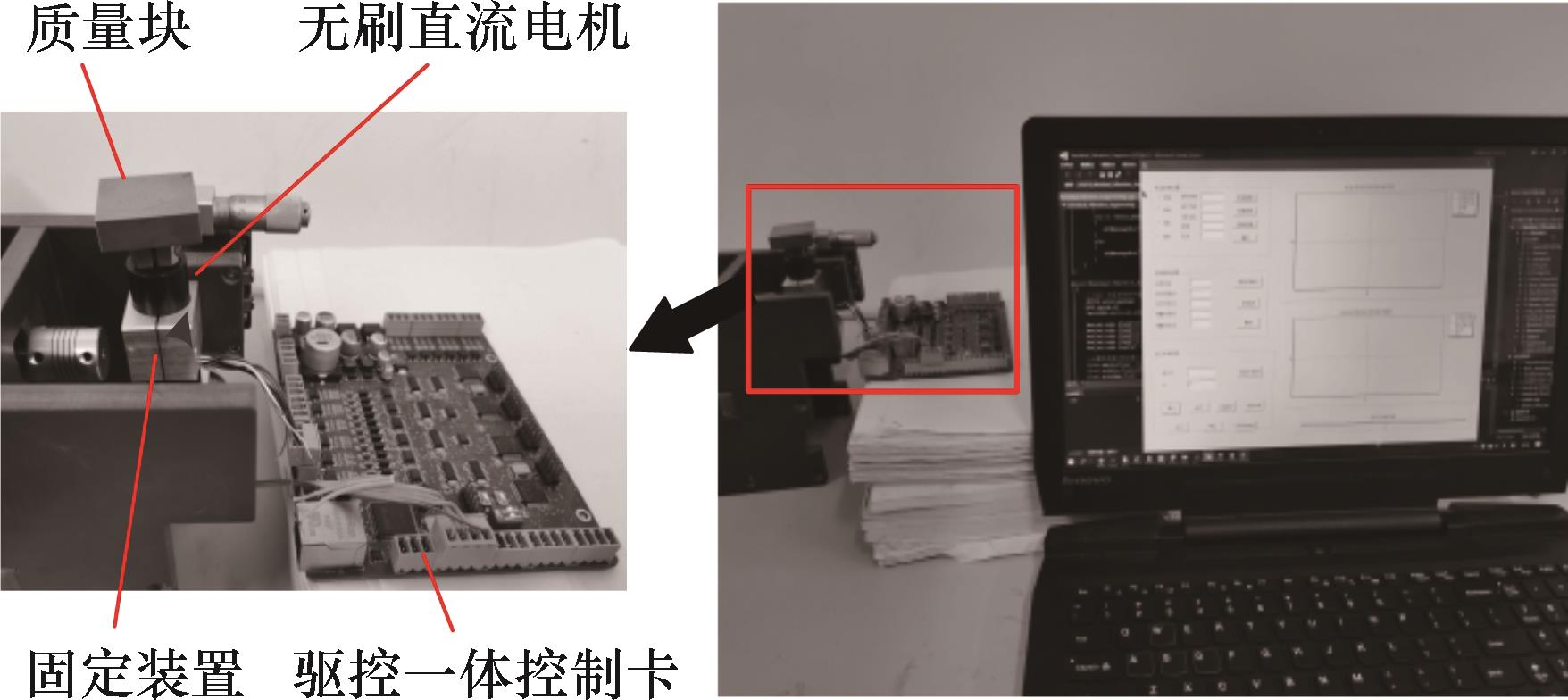
Fig.12 Brushless direct current motor experimental platform
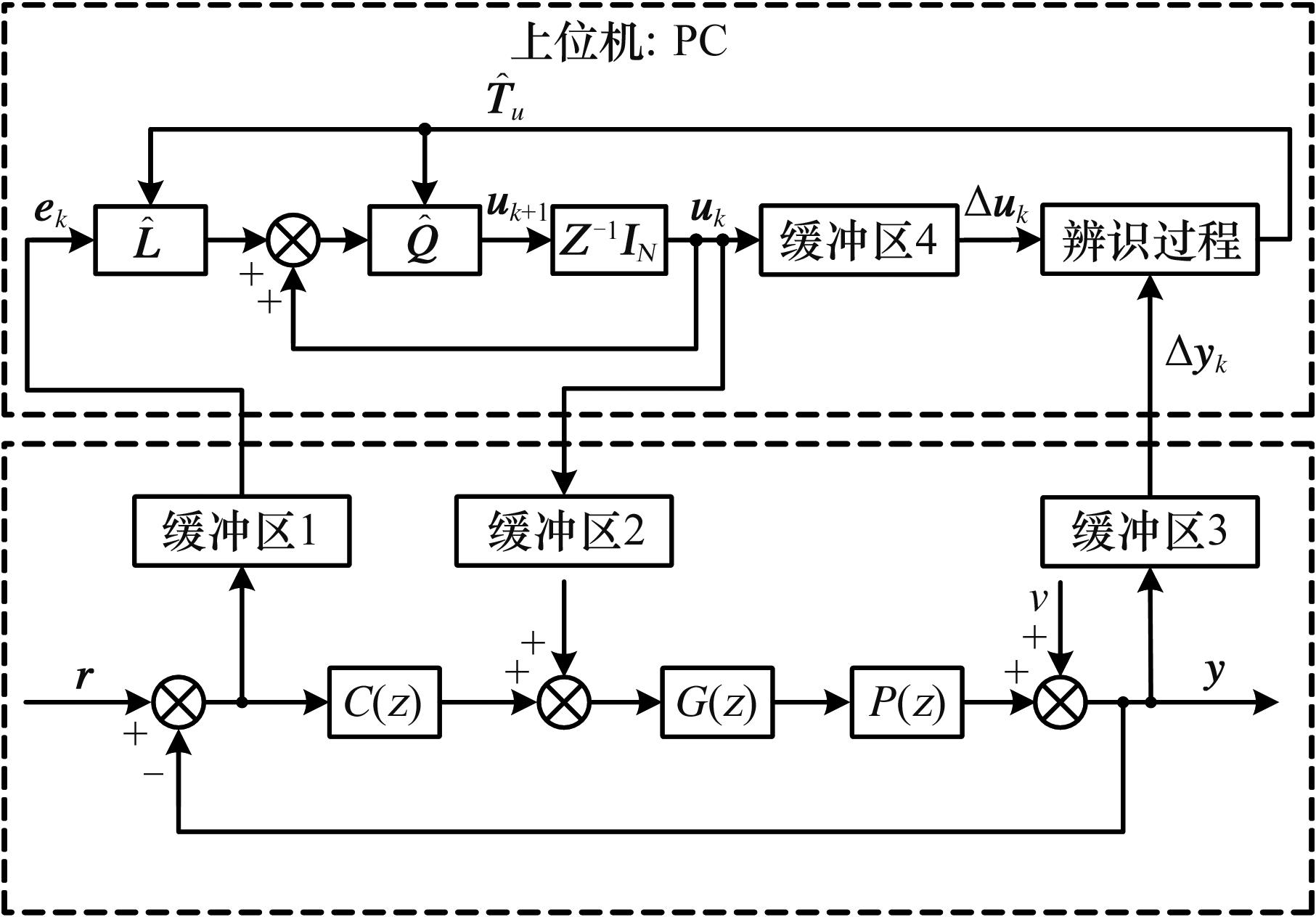
Fig.13 Block diagram of the control scheme
| 前馈信号加权系数 | 最大控制信号/( |
|---|---|
| 48.56 | |
| 46.16 | |
| 42.10 |
Tab.4 The maximum control signal under different ω when η = 1.6×10-7
| 前馈信号加权系数 | 最大控制信号/( |
|---|---|
| 48.56 | |
| 46.16 | |
| 42.10 |
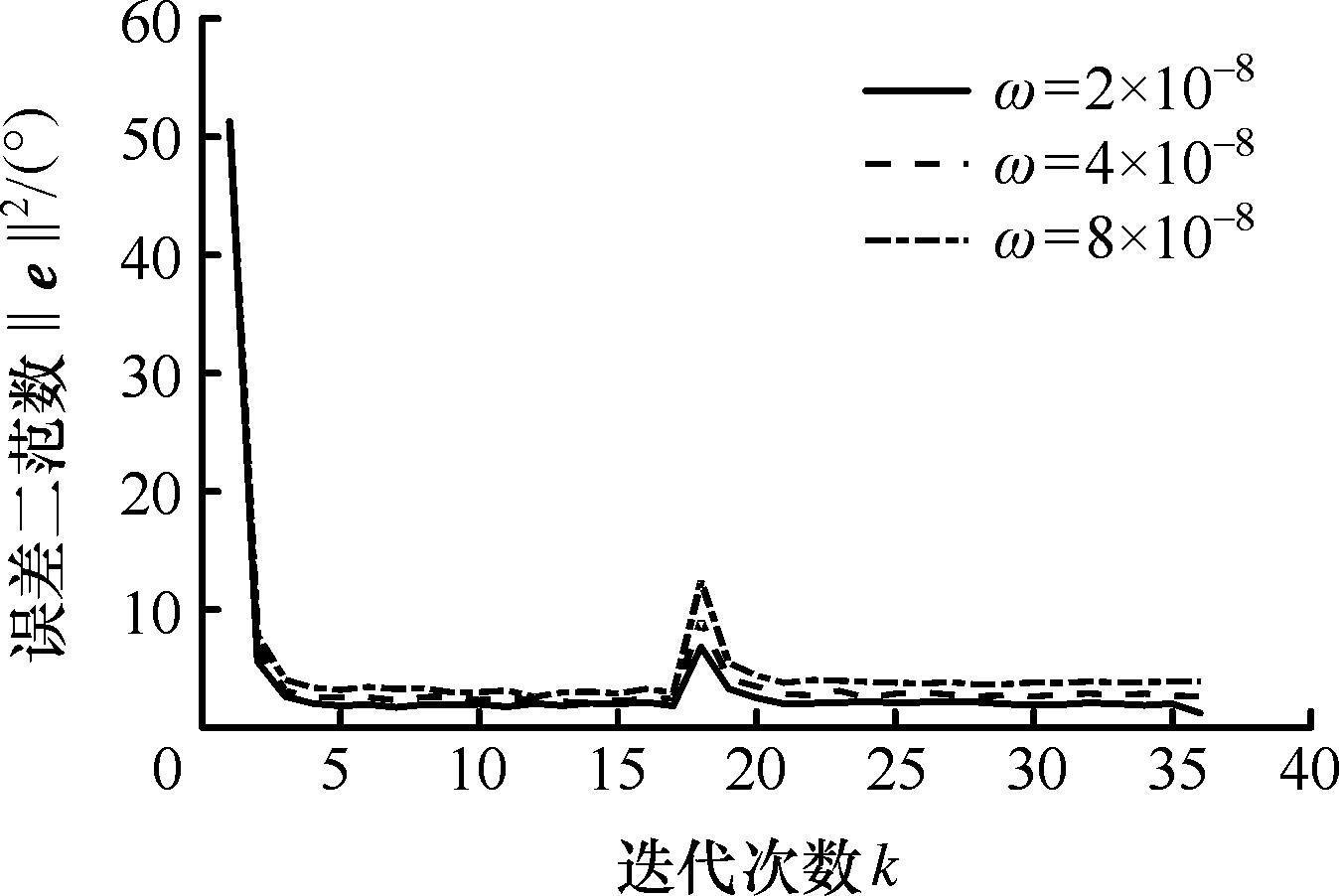
Fig.14 The influence curve of different ω on the 2-norm of the error when η = 1.6×10-7
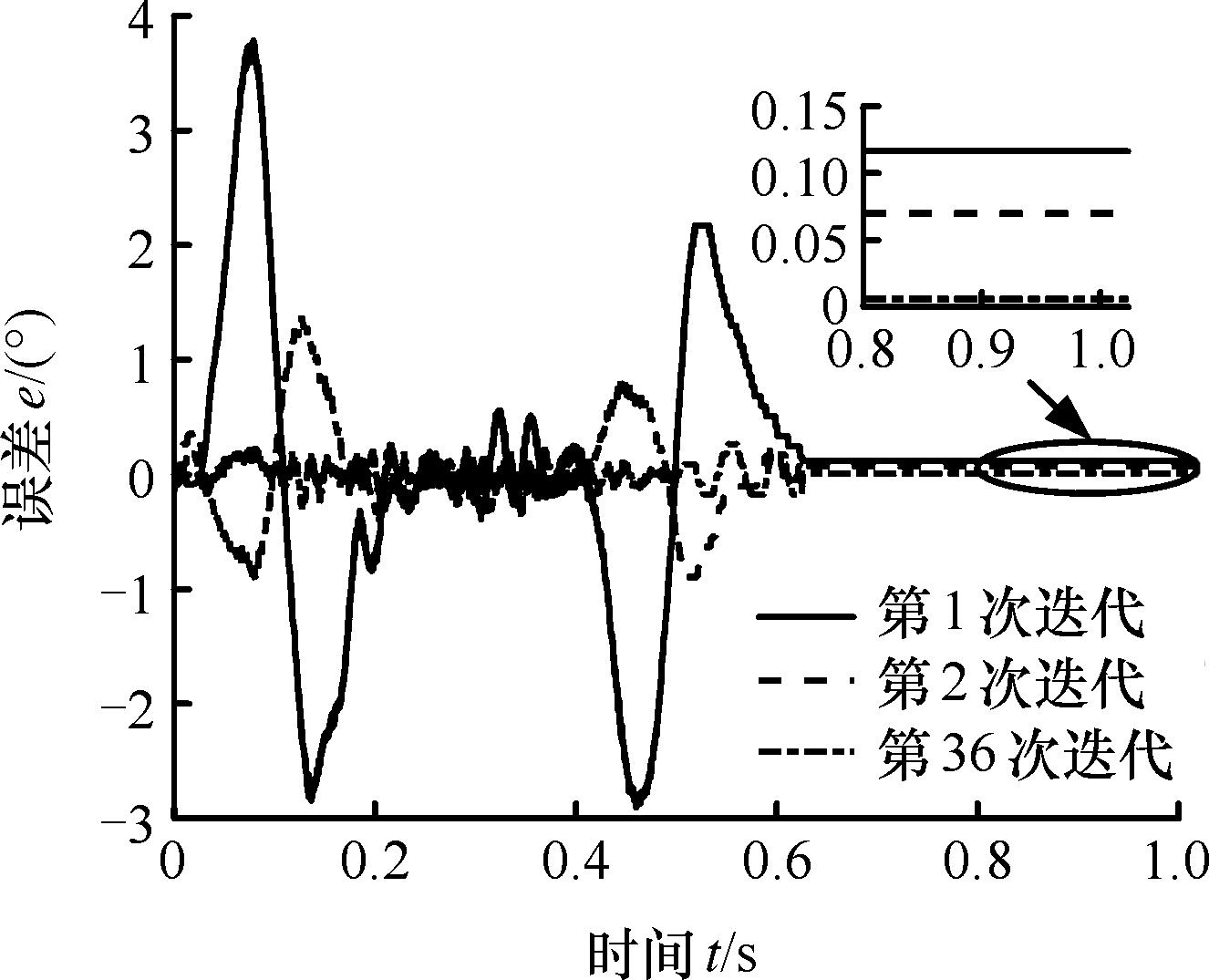
Fig.15 Full trajectory iterative error when ω = 2×10-8, η = 1.6×10-7
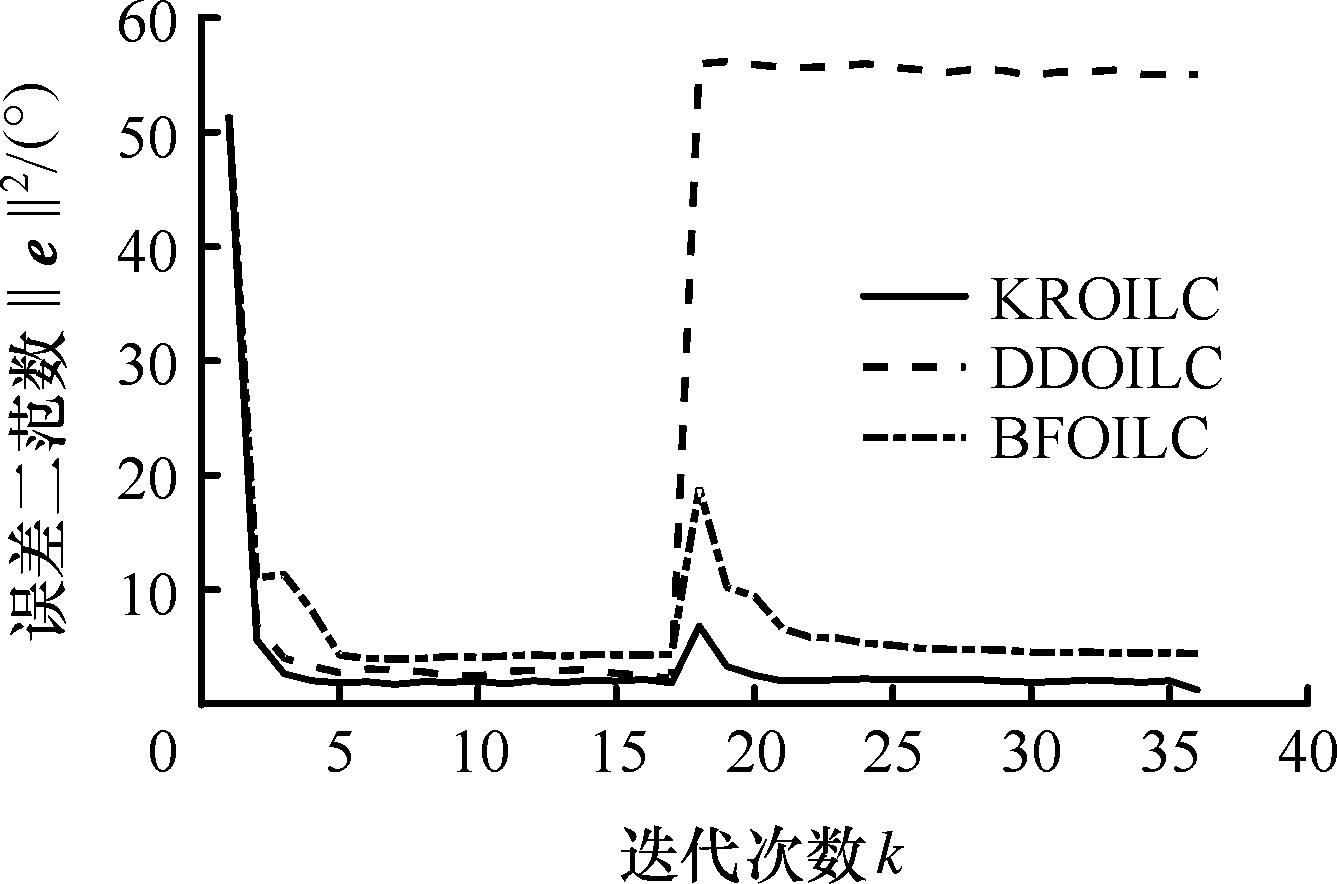
Fig.16 The 2-norm of the error for three algorithms in non-repetitive trajectory experiment
| [1] | GOUBEJ M, MEEUSEN S, MOOREN N, et al. Iterative Learning Control in High-performance Motion Systems:from Theory to Implementation[C]∥2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). Zaragoza, 2019:851-856. |
| [2] | OOMEN T, ROJAS C R. Sparse Iterative Learning Control with Application to a Wafer Stage:Achieving Performance, Resource Efficiency, and Task Flexibility[J]. Mechatronics, 2017, 47:134-147. |
| [3] | BOEREN F, BAREJA A, KOK T, et al. Frequency-domain ILC Approach for Repeating and Varying Tasks:with Application to Semiconductor Bonding Equipment[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6):2716-2727. |
| [4] | GU P, TIAN S. P-type Iterative Learning Control with Initial State Learning for One-sided Lipschitz Nonlinear Systems[J]. International Journal of Control, Automation and Systems, 2019, 17:2203-2210. |
| [5] | FREEMAN C T. Newton-method Based Iterative Learning Control for Robot-assisted Rehabilitation Using FES[J]. Mechatronics, 2014, 24(8):934-943. |
| [6] | FIORENTINO A, CERETTI E, FERITI G C, et al. Improving Accuracy in Aluminum Incremental Sheet Forming of Complex Geometries Using Iterative Learning Control[J]. Key Engineering Materials, 2015, 651:1096-1102. |
| [7] | BALTA E C, BARTON K, TILBURY D M, et al. Learning-based Repetitive Precision Motion Control with Mismatch Compensation[C]∥2021 60th IEEE Conference on Decision and Control (CDC). Austin, TX, 2021:3605-3610. |
| [8] | van de WIJDEVEN J, BOSGRA O H. Using Basis Functions in Iterative Learning Control:Analysis and Design Theory[J]. International Journal of Control, 2010, 83(4):661-675. |
| [9] | PILLONETTO G, de NICOLAO G. A New Kernel-based Approach for Linear System Identification[J]. Automatica, 2010, 46(1):81-93. |
| [10] | BLANKEN L, OOMEN T. Kernel-based Identification of Non-causal Systems with Application to Inverse Model Control[J]. Automatica, 2020, 114:108830. |
| [11] | PILLONETTO G, DINUZZO F, CHEN T, et al. Kernel Methods in System Identification, Machine Learning and Function Estimation:a Survey[J]. Automatica, 2014, 50(3):657-682. |
| [12] | CHEN T, OHLSSON H, LJUNG L. On the Estimation of Transfer Functions, Regularizations and Gaussian Processes—Revisited[J]. Automatica, 2012, 48(8):1525-1535. |
| [13] | LJUNG L, CHEN T, MU B. A Shift in Paradigm for System Identification[J]. International Journal of Control, 2020, 93(2):173-180. |
| [14] | CHEN T. On Kernel Design for Regularized LTI System Identification[J]. Automatica, 2018, 90:109-122. |
| [15] | THORPE A J, NEARY C, DJEUMOU F, et al. Physics-informed Kernel Embeddings:Integrating Prior System Knowledge with Data-driven Control[C]∥2024 American Control Conference (ACC). Toronto, 2024:3130-3137. |
| [16] | YU X, FANG X, MU B, et al. Kernel-based Regularized Iterative Learning Control of Repetitive Linear Time-varying Systems[J]. Automatica, 2023, 154:111047. |
| [17] | JANSSENS P, PIPELEERS G, SWEVERS J. A Data-driven Constrained Norm-optimal Iterative Learning Control Framework for LTI Systems[J]. IEEE Transactions on Control Systems Technology, 2012, 21(2):546-551. |
| [18] | 杨亮亮, 袁锐, 史伟民, 等. 基于数据驱动的自适应最优迭代学习控制研究[J]. 机械工程学报, 2021, 57(17):207-216. |
| YANG Liangliang, YUAN Rui, SHI Weimin, et al. Research on Data Driven Adaptive Optimal Iterative Learning Control[J]. Journal of Mechanical Engineering, 2021, 57(17):207-216. | |
| [19] | MURPHY K P. Machine Learning:a Probabilistic Perspective [M]. Cambridge, MA:MIT Press, 2012. |
| [20] | BOLDER J, OOMEN T, KOEKEBAKKER S, et al. Using Iterative Learning Control with Basis Functions to Compensate Medium Deformation in a Wide-format Inkjet Printer[J]. Mechatronics, 2014, 24(8):944-953. |
| [1] | ZHANG Ji, YUAN Haibo, WANG Zhixuan, ZHU Sihua, BAI Zhenhua. Physics-guided Neural Network Model for Predicting Rolling Forces in Aluminum Strip Cold Rolling [J]. China Mechanical Engineering, 2026, 37(5): 1199-1209. |
| [2] | SUN Yue, HUANG Hui, YIN Fangchen. Energy Consumption Prediction of Industrial Robots under High-load Dynamic Conditions [J]. China Mechanical Engineering, 2026, 37(4): 939-947. |
| [3] | WANG Liming, XIAO Xingyuan, LI Fangyi, WANG Xiaoguang, LI Jianfeng, NIE Yanyan, LIU Weitong, LI Liuyuan, WANG Yitong, WANG Boyun, CUI Yuqi. Overview and Prospects of Data-driven Low-carbon Design and Manufacturing of Electromechanical Products [J]. China Mechanical Engineering, 2026, 37(4): 764-779. |
| [4] | ZHAO Peirui1, DENG Chao1, ZHU Bo1, YAN Wenbin1, LIANG Min2, CHEN Min2. Modelling and Optimisation of Dynamic Scheduling in Chinese Materia Medica Pharmaceuticals Workshops Based on Multiple Motivation Drivers [J]. China Mechanical Engineering, 2025, 36(06): 1247-1260,1299. |
| [5] | XIAO Gang, GU Hairui, DONG Jinjin, WANG Qibing, LU Jiawei. Simulation Data-driven Migration Diagnosis Method for Guide Rail Faults in Long-term Service Elevators [J]. China Mechanical Engineering, 2024, 35(01): 125-135. |
| [6] |
LI Congbo;YIN Yuxian;XIAO Qinge;LONG Yun;ZHAO Xikun.
Data-driven Energy Consumption Prediction Method of CNC Turning Based on Meta-action
[J]. China Mechanical Engineering, 2020, 31(21): 2601-2611.
|
| [7] | WU Yangdong, ZHANG Taihua, LIU Dan, WANG Yiquan. Data-driven Multi-attribute Optimization Decision-making for Complex Product Design Schemes [J]. China Mechanical Engineering, 2020, 31(07): 865-870. |
| [8] | LI Hao, WANG Haoqi, CHENG Ying, TAO Fei, HAO Bing, WANG Xinchang, JI Yangjian, SONG Wenyan, DU Wenliao, WEN Xiaoyu, GONG Xiaoyun, LI Ke, ZHANG Yingfeng, LUO Guofu, LI Qifeng. Technology and Application of Data-driven Intelligent Services for Complex Products [J]. China Mechanical Engineering, 2020, 31(07): 757-772. |
| [9] | LIU Yinhua, SUN Rui, WU Huan. Latent Structure Modeling and Predictive Quality Control Based on Multi-source Data Streams in the Auto Body Assembly Processes [J]. China Mechanical Engineering, 2019, 30(02): 237-243. |
| [10] | YUAN Guangchao;BAO Jingsong;ZHENG Xiaohu;ZHANG Jie. Tool Life Prediction in Titanium High Speed Milling Processes Based on CNC Real Time Monitoring Data Driven [J]. China Mechanical Engineering, 2018, 29(04): 457-462,470. |
| [11] | ZHAO Linfeng1;CHEN Jiushan2;CHEN Wuwei1;ZHANG Rongyun3. Torque Ripple Suppression of PMSM Applied for EPS Based on Motor Rotation Angle's ILC [J]. China Mechanical Engineering, 2017, 28(24): 2906-2913. |
| [12] | Liu Xiangqi, Meng Zhen, Ni Jing, Zhu Zefei. Modeling and Synchronous Control on Rotary System with Dual Motor [J]. China Mechanical Engineering, 2015, 26(4): 469-474,496. |
| [13] | LI Hong-Qing, LIU Di, TENG Fu-Lin, HUANG Jia-Cai, ZHANG Jian-Hua. On Monotonic Convergence of Iterative Learning Control for Interval Uncertainty Discrete-time System [J]. China Mechanical Engineering, 2012, 23(9): 1013-1016. |
| [14] | Yang Yan, Wang Yunkuan, Song Yinghua. Clamping Mechanism’s Position Control of IMM Based on Iterative Learning Algorithm [J]. China Mechanical Engineering, 2008, 19(18): 0-2151. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||