

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (4): 831-836.DOI: 10.3969/j.issn.1004-132X.2026.04.007
Previous Articles Next Articles
XIAO Wei( ), ZHANG Cong, CHEN Xubing()
), ZHANG Cong, CHEN Xubing()
Received:2025-08-08
Online:2026-04-25
Published:2026-05-11
Contact:
CHEN Xubing
肖伟(), 张聪, 陈绪兵()
通讯作者:
陈绪兵
作者简介:肖伟,男,1991年生,博士后研究人员。研究方向为工业机器人能耗预测与能效优化。Email:xiaowei@wit.edu.cn基金资助:CLC Number:
XIAO Wei, ZHANG Cong, CHEN Xubing. Energy Consumption Prediction of Industrial Robots Based on Bayesian Optimized Temporal Convolutional Network[J]. China Mechanical Engineering, 2026, 37(4): 831-836.
肖伟, 张聪, 陈绪兵. 基于贝叶斯优化时间卷积网络的工业机器人能耗预测[J]. 中国机械工程, 2026, 37(4): 831-836.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.04.007
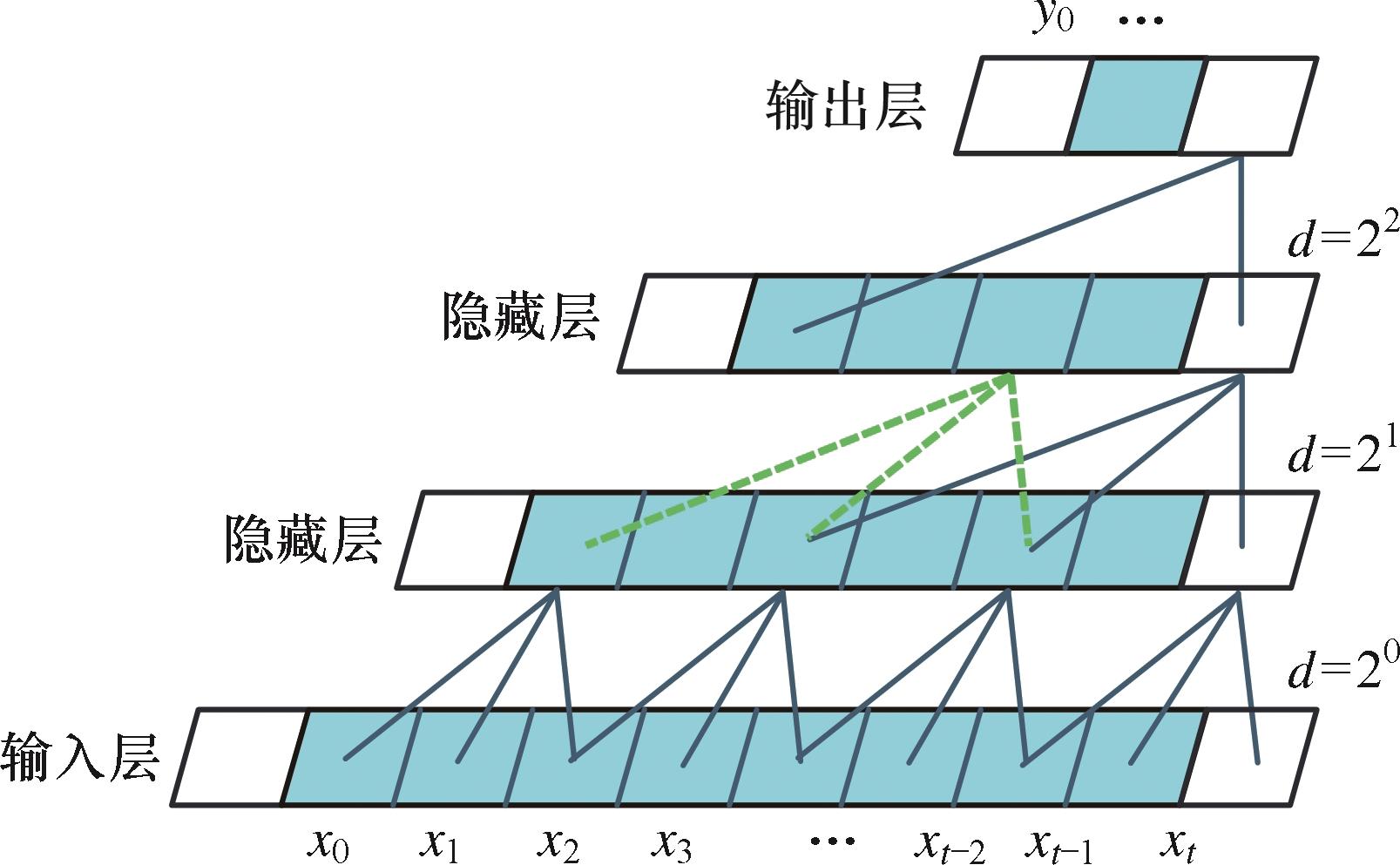
Fig.1 Structure of dilated causal convolutions
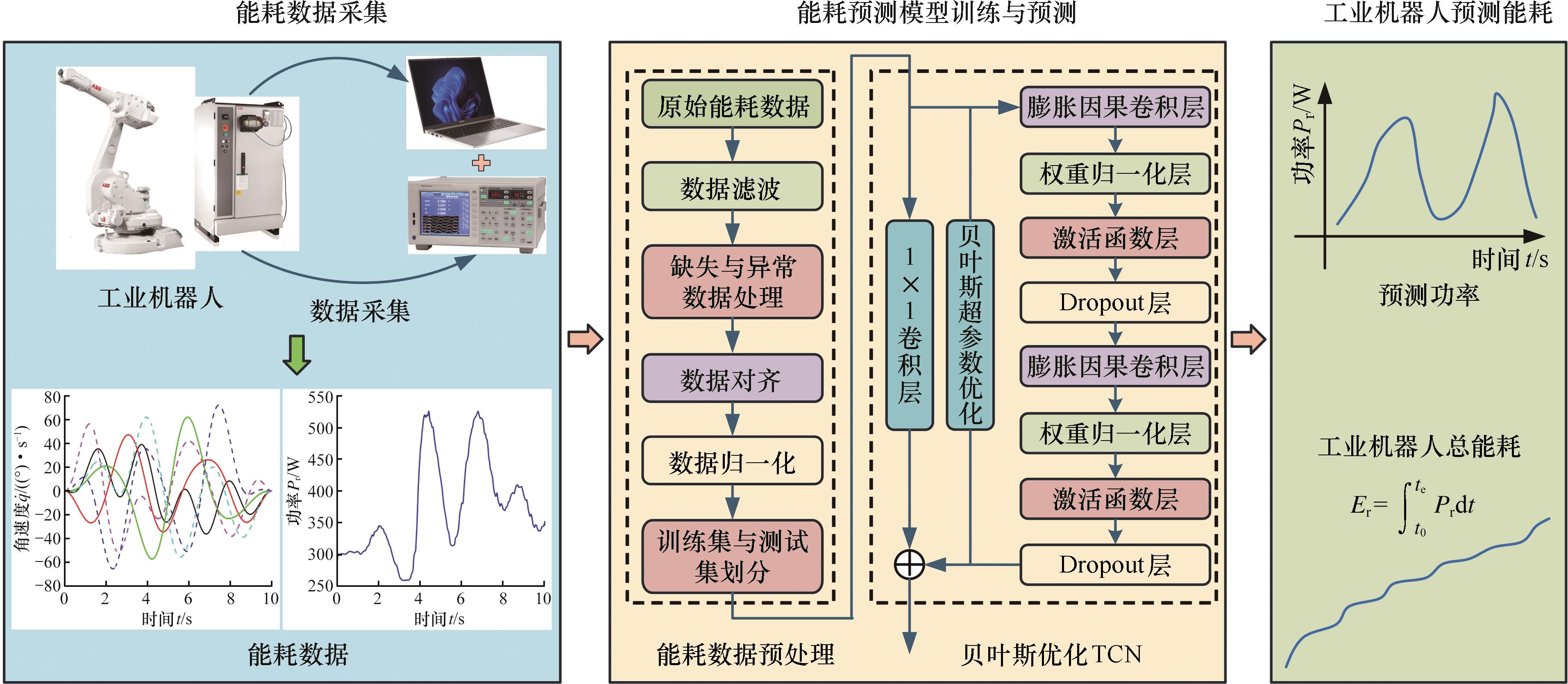
Fig.2 Energy consumption prediction process of TCN based on Bayesian optimization

Fig.3 Experimental platform
| 参数 | 值 | 超参数 | 寻优范围 | 寻优值 |
|---|---|---|---|---|
| 学习调整因子 | 0.1 | 学习率 | 10 | 0.001 |
| 残差块 | 2 | 层数 | 1~6 | 2 |
| 梯度阈值 | 1 | 核大小 | 2~6 | 3 |
| 初始学习率 | 0.001 | 滤波器 | 8~16 | 10 |
Tab.1 TCN model parameters and hyperparameters
| 参数 | 值 | 超参数 | 寻优范围 | 寻优值 |
|---|---|---|---|---|
| 学习调整因子 | 0.1 | 学习率 | 10 | 0.001 |
| 残差块 | 2 | 层数 | 1~6 | 2 |
| 梯度阈值 | 1 | 核大小 | 2~6 | 3 |
| 初始学习率 | 0.001 | 滤波器 | 8~16 | 10 |
| 参数 | 值 | ||
|---|---|---|---|
| CNN | LSTM | CNN-LSTM | |
| 优化器 | Adam | Adam | Adam |
| LSTM层数 | 64 | 25 | |
| 每个卷积核大小 | 3*1 | 3*1 | |
| 最大迭代次数 | 250 | 250 | 250 |
| 梯度阈值 | 1 | 1 | 1 |
| 初始学习率 | 0.02 | 0.01 | 0.01 |
| 学习调整因子 | 0.05 | 0.10 | 0.10 |
| 学习因子调整周期 | 150 | 150 | 150 |
Tab. 2 Baseline method network parameters
| 参数 | 值 | ||
|---|---|---|---|
| CNN | LSTM | CNN-LSTM | |
| 优化器 | Adam | Adam | Adam |
| LSTM层数 | 64 | 25 | |
| 每个卷积核大小 | 3*1 | 3*1 | |
| 最大迭代次数 | 250 | 250 | 250 |
| 梯度阈值 | 1 | 1 | 1 |
| 初始学习率 | 0.02 | 0.01 | 0.01 |
| 学习调整因子 | 0.05 | 0.10 | 0.10 |
| 学习因子调整周期 | 150 | 150 | 150 |
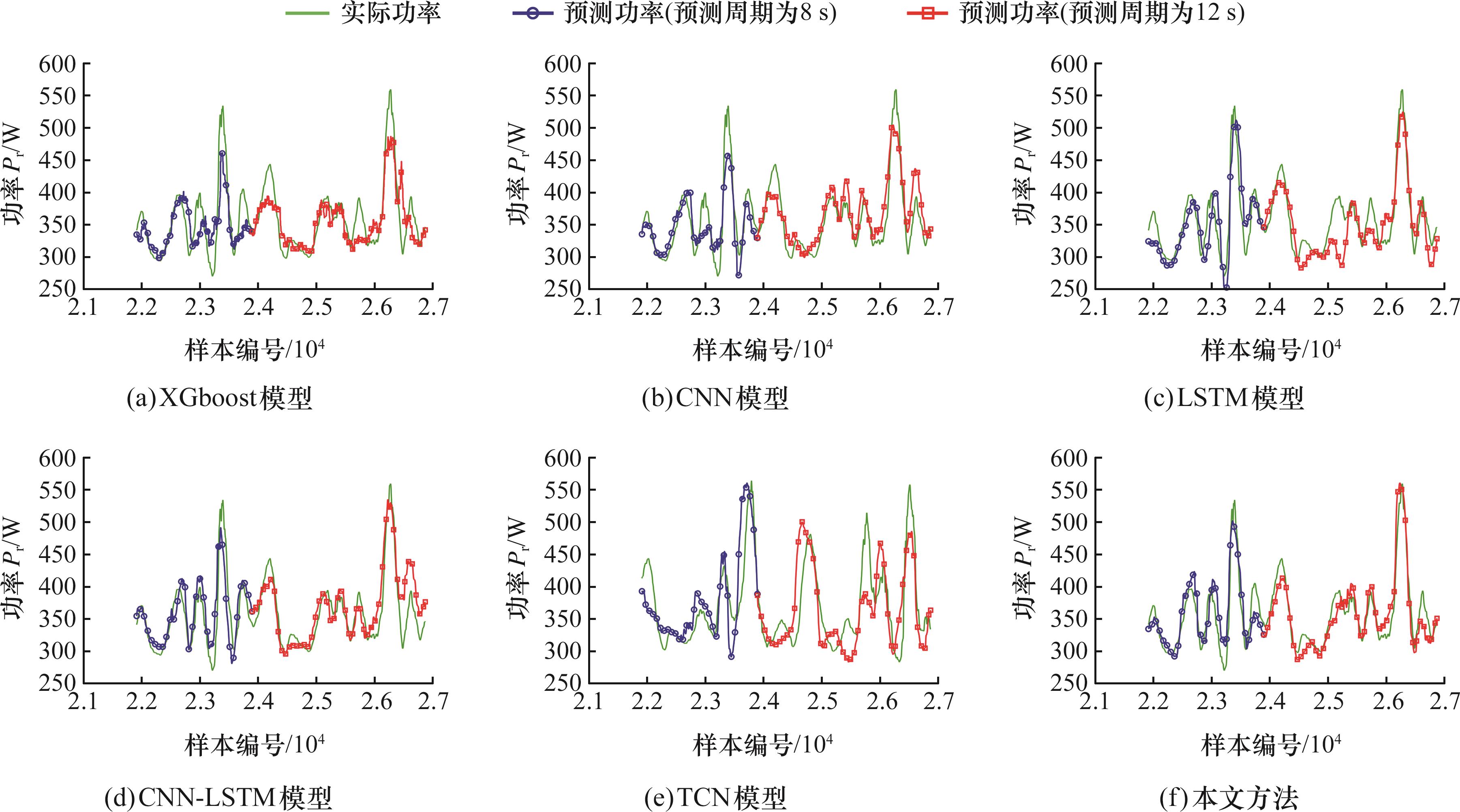
Fig.4 Different models of industrial robot power consumption prediction results(no-load)
| 评估方法 | 负载 | 轨迹时长 | 模型 | |||||
|---|---|---|---|---|---|---|---|---|
| XGboost | CNN | LSTM | CNN-LSTM | TCN | 本文方法 | |||
| MAE/W | 无负载 | 8 s | 26.13 | 21.26 | 24.11 | 21.81 | 29.96 | 20.72 |
| 12 s | 21.22 | 20.71 | 23.24 | 20.12 | 34.50 | 16.05 | ||
| 平均值 | 23.68 | 20.99 | 23.68 | 20.97 | 32.23 | 18.39 | ||
| 1.5 kg | 8 s | 22.73 | 28.26 | 28.25 | 23.43 | 25.20 | 25.12 | |
| 12 s | 30.13 | 37.71 | 26.75 | 25.92 | 31.32 | 28.84 | ||
| 平均值 | 26.43 | 32.99 | 27.50 | 24.68 | 28.26 | 26.89 | ||
| RMSE/W | 无负载 | 8 s | 36.02 | 27.39 | 30.01 | 29.10 | 42.28 | 24.71 |
| 12 s | 29.30 | 25.80 | 30.64 | 26.84 | 45.61 | 20.22 | ||
| 平均值 | 32.66 | 26.60 | 30.33 | 27.97 | 43.95 | 22.47 | ||
| 1.5 kg | 8 s | 29.85 | 24.27 | 34.37 | 30.50 | 32.47 | 37.76 | |
| 12 s | 41.26 | 32.04 | 33.36 | 33.62 | 38.02 | 38.21 | ||
| 平均值 | 35.56 | 28.16 | 33.87 | 32.06 | 35.25 | 37.99 | ||
| 无负载 | 8 s | 2.08 | 1.82 | 1.16 | 1.56 | 1.38 | 1.06 | |
| 12 s | 1.58 | 2.79 | 2.93 | 2.35 | 1.42 | 1.01 | ||
| 平均值 | 1.83 | 2.31 | 2.045 | 1.96 | 1.40 | 1.04 | ||
| 1.5 kg | 8 s | 4.29 | 3.45 | 2.09 | 4.48 | 2.83 | 2.05 | |
| 12 s | 1.25 | 1.92 | 1.53 | 1.59 | 1.86 | 1.51 | ||
| 平均值 | 2.77 | 2.69 | 1.81 | 3.04 | 2.35 | 1.78 | ||
Tab. 3 The energy consumption prediction errors of different models under 8 s and 12 s prediction time are compared
| 评估方法 | 负载 | 轨迹时长 | 模型 | |||||
|---|---|---|---|---|---|---|---|---|
| XGboost | CNN | LSTM | CNN-LSTM | TCN | 本文方法 | |||
| MAE/W | 无负载 | 8 s | 26.13 | 21.26 | 24.11 | 21.81 | 29.96 | 20.72 |
| 12 s | 21.22 | 20.71 | 23.24 | 20.12 | 34.50 | 16.05 | ||
| 平均值 | 23.68 | 20.99 | 23.68 | 20.97 | 32.23 | 18.39 | ||
| 1.5 kg | 8 s | 22.73 | 28.26 | 28.25 | 23.43 | 25.20 | 25.12 | |
| 12 s | 30.13 | 37.71 | 26.75 | 25.92 | 31.32 | 28.84 | ||
| 平均值 | 26.43 | 32.99 | 27.50 | 24.68 | 28.26 | 26.89 | ||
| RMSE/W | 无负载 | 8 s | 36.02 | 27.39 | 30.01 | 29.10 | 42.28 | 24.71 |
| 12 s | 29.30 | 25.80 | 30.64 | 26.84 | 45.61 | 20.22 | ||
| 平均值 | 32.66 | 26.60 | 30.33 | 27.97 | 43.95 | 22.47 | ||
| 1.5 kg | 8 s | 29.85 | 24.27 | 34.37 | 30.50 | 32.47 | 37.76 | |
| 12 s | 41.26 | 32.04 | 33.36 | 33.62 | 38.02 | 38.21 | ||
| 平均值 | 35.56 | 28.16 | 33.87 | 32.06 | 35.25 | 37.99 | ||
| 无负载 | 8 s | 2.08 | 1.82 | 1.16 | 1.56 | 1.38 | 1.06 | |
| 12 s | 1.58 | 2.79 | 2.93 | 2.35 | 1.42 | 1.01 | ||
| 平均值 | 1.83 | 2.31 | 2.045 | 1.96 | 1.40 | 1.04 | ||
| 1.5 kg | 8 s | 4.29 | 3.45 | 2.09 | 4.48 | 2.83 | 2.05 | |
| 12 s | 1.25 | 1.92 | 1.53 | 1.59 | 1.86 | 1.51 | ||
| 平均值 | 2.77 | 2.69 | 1.81 | 3.04 | 2.35 | 1.78 | ||
| [1] | LENG Jiewu, ZHOU Man, XIAO Yuxuan, et al. Digital Twins-based Remote Semi-physical Commissioning of Flow-type Smart Manufacturing Systems[J]. Journal of Cleaner Production, 2021, 306: 127278. |
| [2] | Chong LYU, ZOU Lai, HUANG Yun, et al. A Novel Toolpath for Robotic Adaptive Grinding of Extremely Thin Blade Edge Based on Dwell Time Model[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 4429-4439. |
| [3] | MEIKE D, PELLICCIARI M, BERSELLI G. Energy Efficient Use of Multirobot Production Lines in the Automotive Industry: Detailed System Modeling and Optimization[J]. IEEE Transactions on Automation Science and Engineering, 2014, 11(3): 798-809. |
| [4] | XIAO Wei, HAN Guirong, ALLY A S, et al. Energy Consumption Modeling and Parameter Identification Based on System Decomposition of Welding Robots[J]. The International Journal of Advanced Manufacturing Technology, 2024, 130(3): 1579-1594. |
| [5] | RIAZI S, WIGSTRÖM O, BENGTSSON K, et al. Energy and Peak Power Optimization of Time-bounded Robot Trajectories[J]. IEEE Transactions on Automation Science and Engineering, 2017, 14(2): 646-657. |
| [6] | ZHOU Jin, YI Hao, CAO Huajun, et al. Structural Decomposition-based Energy Consumption Modeling of Robot Laser Processing Systems and Energy-efficient Analysis[J]. Robotics and Computer-Integrated Manufacturing, 2022, 76: 102327. |
| [7] | HEREDIA J, SCHLETTE C, KJÆRGAARD M B. Data-driven Energy Estimation of Individual Instructions in User-defined Robot Programs for Collaborative Robots[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 6836-6843. |
| [8] | LIU Aiming, LIU Huan, YAO Bitao, et al. Energy Consumption Modeling of Industrial Robot Based on Simulated Power Data and Parameter Identification[J]. Advances in Mechanical Engineering, 2018, 10(5): 1687814018773852. |
| [9] | 庹军波, 彭秋媛, 张贤明, 等. 工业机器人能耗预测研究[J]. 中国机械工程, 2022, 33(22): 2727-2732. |
| JunboTUO, PENG Qiuyuan, ZHANG Xianming, et al. Research on Energy Consumption Prediction of Industrial Robots[J]. China Mechanical Engineering, 2022, 33(22): 2727-2732. | |
| [10] | YAN Jihong, ZHANG Mingyang. A Transfer-learning Based Energy Consumption Modeling Method for Industrial Robots[J]. Journal of Cleaner Production, 2021, 325: 129299. |
| [11] | JIANG Pei, WANG Zuoxue, LI Xiaobin, et al. Energy Consumption Prediction and Optimization of Industrial Robots Based on LSTM[J]. Journal of Manufacturing Systems, 2023, 70: 137-148. |
| [12] | WANG Zuoxue, JIANG Pei, LI Xiaobin, et al. A Novel Hybrid LSTM and Masked Multi-head Attention Based Network for Energy Consumption Prediction of Industrial Robots[J]. Applied Energy, 2025, 383: 125223. |
| [13] | JIANG Pei, ZHENG Jiajun, WANG Zuoxue, et al. Industrial Robot Energy Consumption Model Identification: a Coupling Model-driven and Data-driven Paradigm[J]. Expert Systems with Applications, 2025, 262: 125604. |
| [14] | 刘譞, 姬亚东, 朱开鹏, 等. 煤层顶板涌水量TCN-LSTM-SVM时间序列预测模型构建与应用[J]. 煤田地质与勘探, 2025, 53(6): 201-211. |
| LIU Xuan, JI Yadong, ZHU Kaipeng, et al. Construction and Application of TCN-LSTM-SVM Time Series Prediction Model for Water Inflow from Coal Seam Roof[J]. Coal Geology & Exploration, 2025, 53(6): 201-211. | |
| [15] | 马将, 韩宏帅, 贾钰峰, 等. 融合遗传算法的GRA-TCN-BiLSTM钢铁工业能耗预测[J]. 中国冶金, 2025, 35(4): 155-165. |
| MA Jiang, HAN Hongshuai, JIA Yufeng, et al. Energy Consumption Prediction of GRA-TCN-BiLSTM Iron and Steel Industry Based on Genetic Algorithm[J]. China Metallurgy, 2025, 35(4): 155-165. | |
| [16] | 邓晓强,战韬阳,项薇,等.基于TCN-BiGRU-SE两阶段特征提取与多特征融合的注塑质量预测方法[J].中国机械工程,2026,37(2): 416-427. |
| DENG Xiaoqiang, ZHAN Taoyang, XIANG Wei, LIN Wenwen, YU Junhe, ZHENG Zhipeng. Injection Molding Quality Prediction Method Based on Two-stage Feature Extraction and Multi-feature Fusion Using TCN-BiGRU-SE Model[J]. China Mechanical Engineering,2026,37(2): 416-427. | |
| [17] | 贺挺伟,谢长君,杨扬,等.基于TCN-LSTM与迁移学习融合的PEMFC多工况动态退化特性研究[J/OL].中国电机工程学报. . |
| HE Tingwei, XIE Changjun, YANG Yang, et al. Multi-condition Dynamic Degradation Characteristics of PEMFC Using TCN-LSTM and Transfer Learning[J/OL]. Proceedings of the CSEE. . | |
| [18] | 陈剑, 严明辉, 陈品. 基于贝叶斯优化多尺度DenseNet的离心泵声信号故障诊断方法[J]. 中国机械工程,2025,36(9): 2032-2038. |
| CHEN Jian, YAN Minghui, CHEN Pin. Fault Diagnosis Method of Centrifugal Pump Acoustic Signal Based on Bayesian Optimization Multi-scale DenseNet[J]. China Mechanical Engineering, 2025,36(9): 2032-2038. | |
| [19] | QIN Zhongkai, BARON L, BIRGLEN L. A New Approach to the Dynamic Parameter Identification of Robotic Manipulators[J]. Robotica, 2010, 28(4): 539-547. |
| [20] | XU Wei, ZHU Hui, ZHENG Yandong, et al. ELXGB: an Efficient and Privacy-preserving XGBoost for Vertical Federated Learning[J]. IEEE Transactions on Services Computing, 2024, 17(3): 878-892. |
| [1] | SUN Yue, HUANG Hui, YIN Fangchen. Energy Consumption Prediction of Industrial Robots under High-load Dynamic Conditions [J]. China Mechanical Engineering, 2026, 37(4): 939-947. |
| [2] | YANG Yu1, 2, LI Xiaolei2, TAO Yourui1, 2, GUO Qiyu1, 2, YE Nan1, 2. Accelerated Load Spectrum Preparation for RV Reducer Service Conditions [J]. China Mechanical Engineering, 2025, 36(06): 1170-1177. |
| [3] | GAO Guanbin1, 2, ZHAO Siguo1, 2, LI Yingjie1, 2. Modeling and Identification of Robot End-payloads Based on Joint Torque Balance [J]. China Mechanical Engineering, 2025, 36(06): 1188-1197. |
| [4] | LI Lucheng, WANG Zhenzhong, HUANG Xuepeng. Research on Constant Force Control System of Robot Bonnet Polishing Based on Fuzzy Impedance Control [J]. China Mechanical Engineering, 2025, 36(05): 1028-1034. |
| [5] | WANG Guirong, NI Zhiqiang, ZHOU Kun, WANG Binrui. Time-optimal Trajectory Planning of Robotic Arms Based on MIPSO Algorithm [J]. China Mechanical Engineering, 2025, 36(05): 1044-1053. |
| [6] | JIANG Jiguang, HOU Jue, SU Chengzhi, BA Qijiao, TIAN Aixin, XU Mingyu. Research on Optimal Pose Set Planning Method under Physical Constraint Robot Kinematics Calibration [J]. China Mechanical Engineering, 2024, 35(03): 472-480. |
| [7] | CHEN Zhuofan, ZHOU Kun, QIN Feifei, WANG Binrui. Inverse Kinematics Solution of Robots Based on IQPSO Algorithm [J]. China Mechanical Engineering, 2024, 35(02): 293-304. |
| [8] | RONG Yu, CHEN Gang, DOU Tianci, . A Multi Index Comprehensive Optimal Anti Impact Trajectory Planning Method [J]. China Mechanical Engineering, 2024, 35(02): 305-316. |
| [9] | YANG Fei, JIANG Wei, CHEN Cheng, HUANG Zhigao, ZHOU Huamin, . Study on Infrared Heat Source-assisted Open-space Industrial Robotic FDM Equipment Design and Forming Performance [J]. China Mechanical Engineering, 2023, 34(11): 1343-1352,1385. |
| [10] | ZHANG Junxin, CHEN Wei, HUANG Sikai, WU Haibin. Control Strategies for Industrial Robot Motion along Slot Based on Force and Position Hybrid Guidances [J]. China Mechanical Engineering, 2023, 34(06): 712-719,726. |
| [11] | TUO Junbo, PENG Qiuyuan, ZHANG Xianmin, LI Congbo. Energy Consumption Prediction Method for Industrial Robots [J]. China Mechanical Engineering, 2022, 33(22): 2727-2732,2740. |
| [12] | LIU Huailan, ZHAO Wenjie, LI Shizhuang, YUE Peng, MA Baorui. Construction Method of Virtual-real Drive Systems for Robots in Digital Twin Workshops [J]. China Mechanical Engineering, 2022, 33(21): 2623-2632. |
| [13] | NI Huakang, YANG Zeyuan, YANG Yifan, CHEN Xindu, YAN Sijie, DING Han. Robot Kinematics Calibration Method Considering Base Frame Errors [J]. China Mechanical Engineering, 2022, 33(06): 647-655. |
| [14] | ZHANG Enzheng, TANG Ningmin, CHEN Gang, LIU Cuiping. Industrial Robot Calibration Based on Improved IGG3 Weight Function of Distance Error Model#br# [J]. China Mechanical Engineering, 2021, 32(13): 1539-1546. |
| [15] | JI Yangzhen, HOU Li, LUO Lan, LUO Pei, LIU Xubin, LIANG Shuang. Solution of Inverse Kinematics for 6R Robots Based on Combinatorial Optimization Algorithm#br# [J]. China Mechanical Engineering, 2021, 32(10): 1222-1232. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||