

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (4): 939-947.DOI: 10.3969/j.issn.1004-132X.2026.04.018
Previous Articles Next Articles
SUN Yue1,2( ), HUANG Hui1,3(), YIN Fangchen1,3
), HUANG Hui1,3(), YIN Fangchen1,3
Received:2025-11-20
Online:2026-04-25
Published:2026-05-11
Contact:
HUANG Hui
孙悦1,2(), 黄辉1,3(), 尹方辰1,3
通讯作者:
黄辉
作者简介:孙悦,女,1995年生,博士研究生。研究方向为绿色制造、智能制造。E-mail: 15145832492@163.com基金资助:CLC Number:
SUN Yue, HUANG Hui, YIN Fangchen. Energy Consumption Prediction of Industrial Robots under High-load Dynamic Conditions[J]. China Mechanical Engineering, 2026, 37(4): 939-947.
孙悦, 黄辉, 尹方辰. 高负载动态工况下工业机器人的能耗预测[J]. 中国机械工程, 2026, 37(4): 939-947.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.04.018
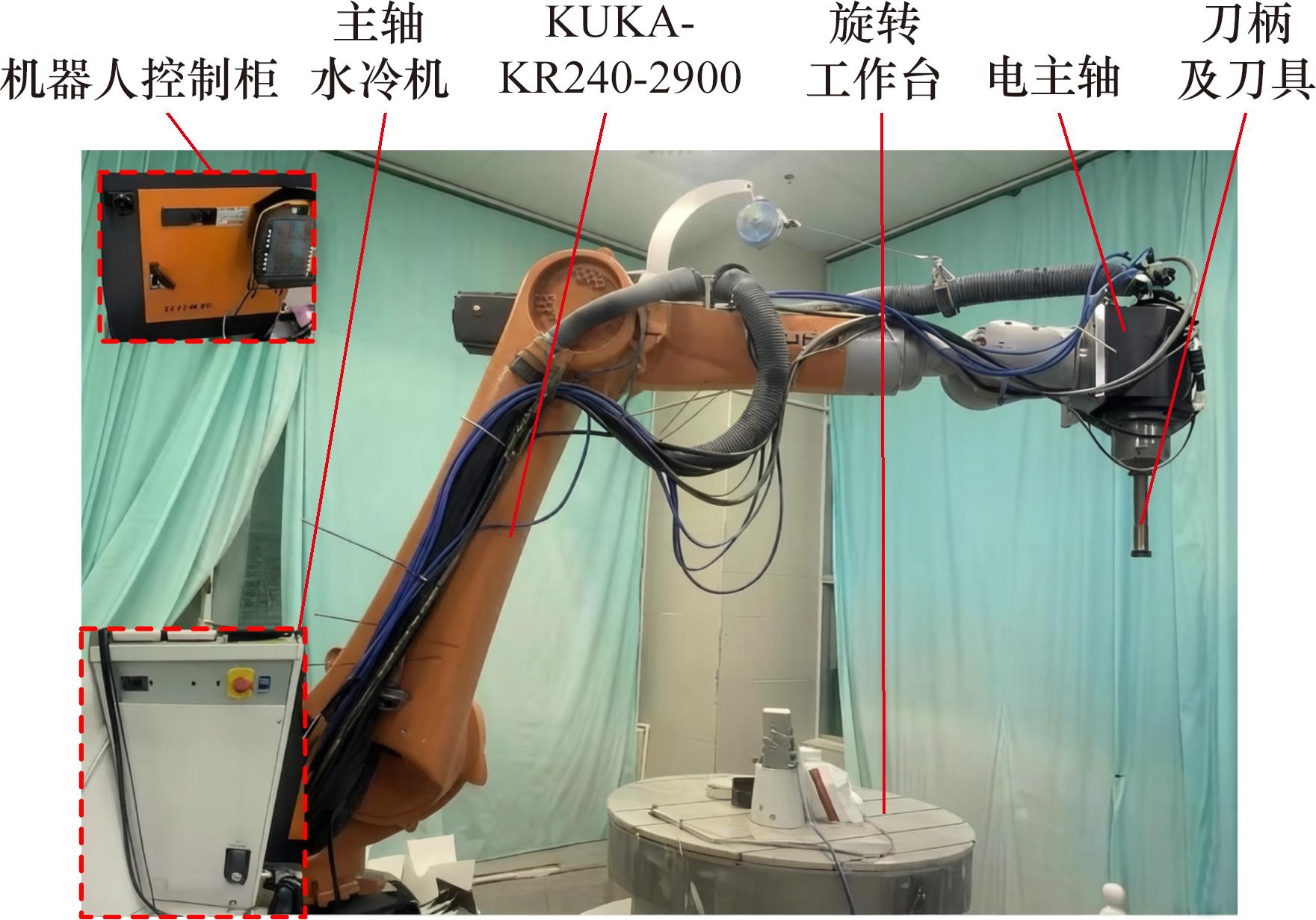
Fig.1 Robotic machining experimental platform
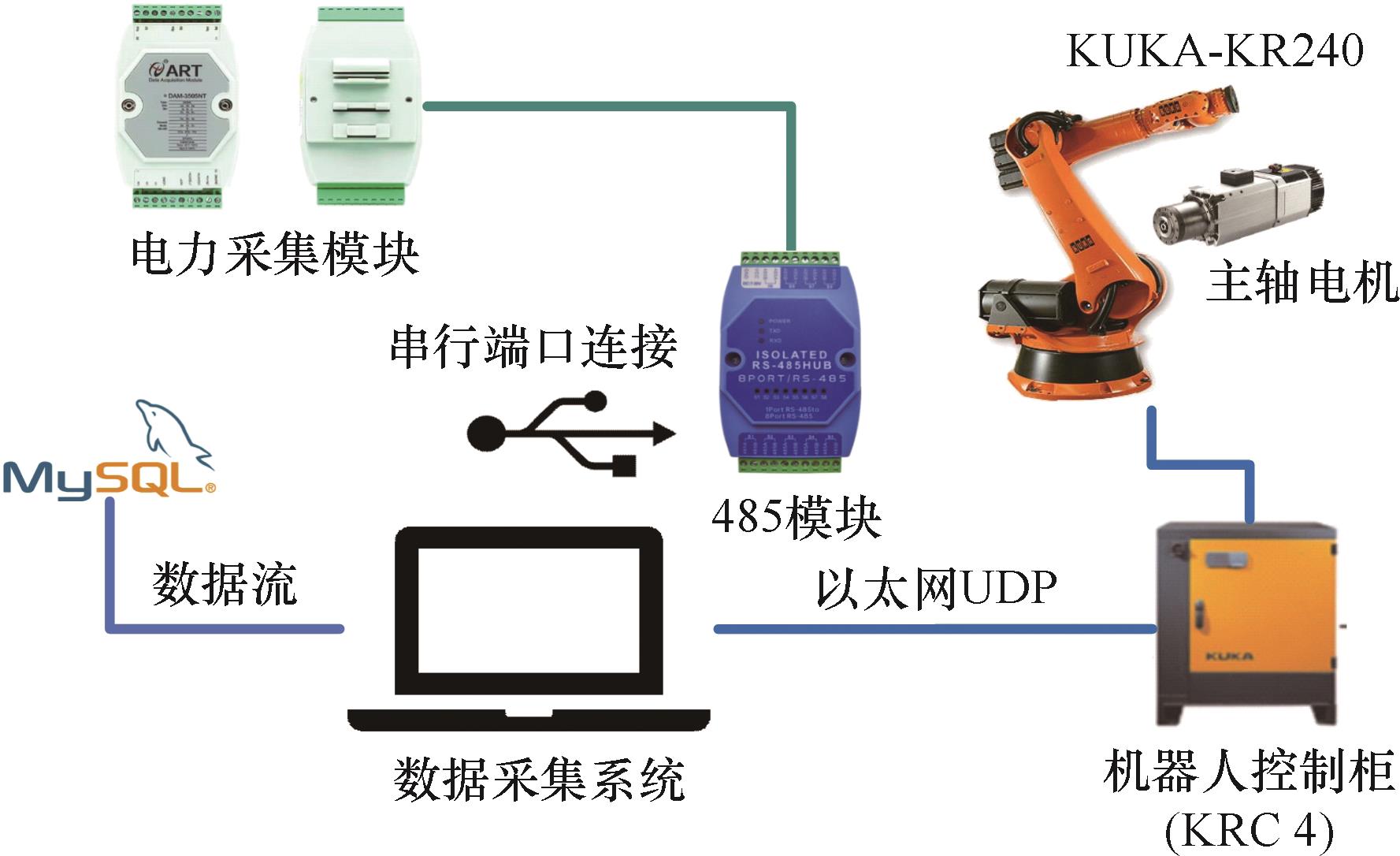
Fig.2 Schematic of the multi-source signal acquisition and storage system
| 压缩强度/MPa | 弯曲强度/MPa | 肖氏硬度HSD | 体积密度/ (g·cm | 吸水率/% |
|---|---|---|---|---|
| 204 | 14.6 | 42 | 2.85 | 0.15 |
Tab.1 Physical and mechanical properties of white marble
| 压缩强度/MPa | 弯曲强度/MPa | 肖氏硬度HSD | 体积密度/ (g·cm | 吸水率/% |
|---|---|---|---|---|
| 204 | 14.6 | 42 | 2.85 | 0.15 |
| 因素 | 水平 | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 主轴转速/(r·min | 7000 | 7500 | 8000 | 8500 | 9000 |
| 进给速度/(mm·min | 1200 | 1500 | 1800 | 2100 | 2400 |
| 切削宽度/mm | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 |
| 切削深度/mm | 1.2 | 1.6 | 2.0 | 2.4 | 2.8 |
Tab.2 Factor levels of machining parameters in the experiment
| 因素 | 水平 | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 主轴转速/(r·min | 7000 | 7500 | 8000 | 8500 | 9000 |
| 进给速度/(mm·min | 1200 | 1500 | 1800 | 2100 | 2400 |
| 切削宽度/mm | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 |
| 切削深度/mm | 1.2 | 1.6 | 2.0 | 2.4 | 2.8 |
| 组号 | 主轴转速/(r·min | 进给速度/(mm·min | 切削宽度/mm | 切削深度/mm |
|---|---|---|---|---|
| 1 | 7250 | 1350 | 1.75 | 1.4 |
| 2 | 7750 | 1650 | 2.25 | 1.8 |
| 3 | 8250 | 1950 | 2.75 | 2.2 |
| 4 | 8750 | 2250 | 3.25 | 2.6 |
| 5 | 7000 | 2400 | 1.50 | 2.8 |
| 6 | 8500 | 1200 | 3.50 | 1.2 |
| 7 | 9000 | 1500 | 2.00 | 2.0 |
| 8 | 7500 | 2100 | 2.50 | 2.4 |
Tab.3 Cutting parameter combinations for verification experiments
| 组号 | 主轴转速/(r·min | 进给速度/(mm·min | 切削宽度/mm | 切削深度/mm |
|---|---|---|---|---|
| 1 | 7250 | 1350 | 1.75 | 1.4 |
| 2 | 7750 | 1650 | 2.25 | 1.8 |
| 3 | 8250 | 1950 | 2.75 | 2.2 |
| 4 | 8750 | 2250 | 3.25 | 2.6 |
| 5 | 7000 | 2400 | 1.50 | 2.8 |
| 6 | 8500 | 1200 | 3.50 | 1.2 |
| 7 | 9000 | 1500 | 2.00 | 2.0 |
| 8 | 7500 | 2100 | 2.50 | 2.4 |
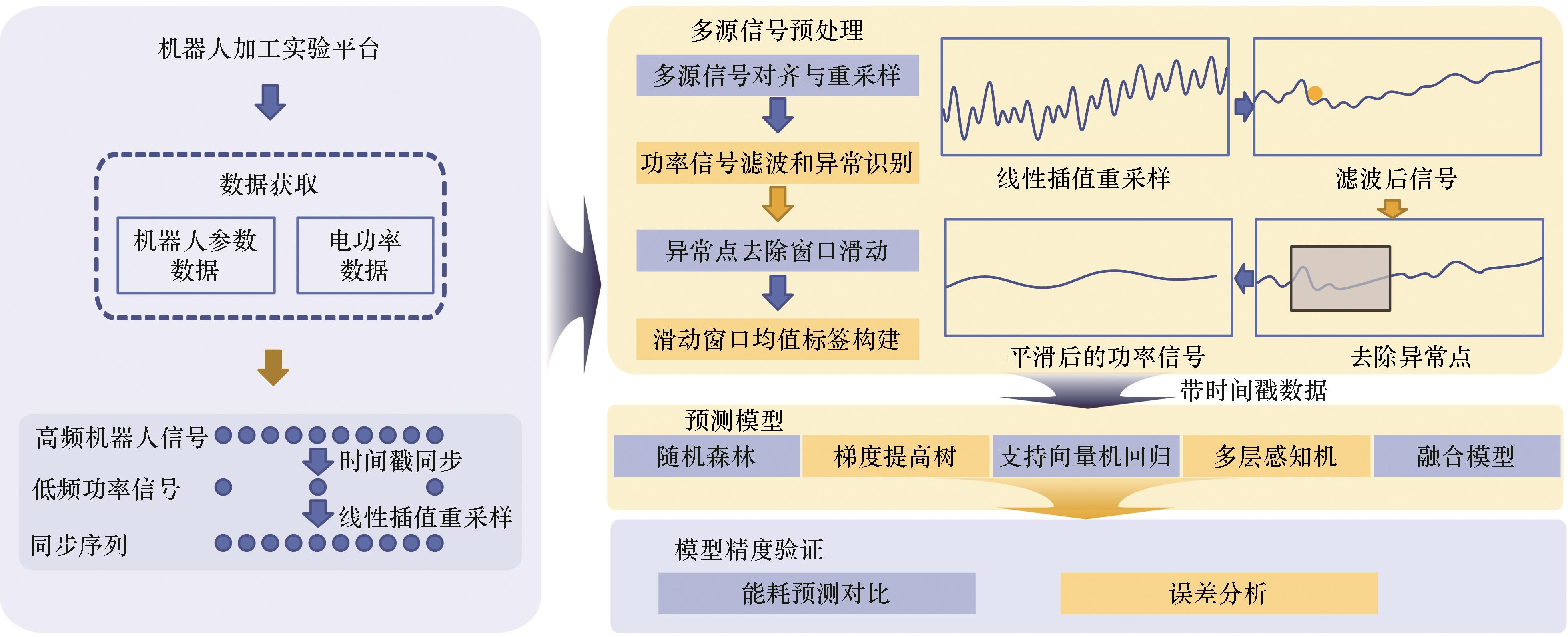
Fig.3 Overall flowchart of the energy consumption prediction method for industrial robots
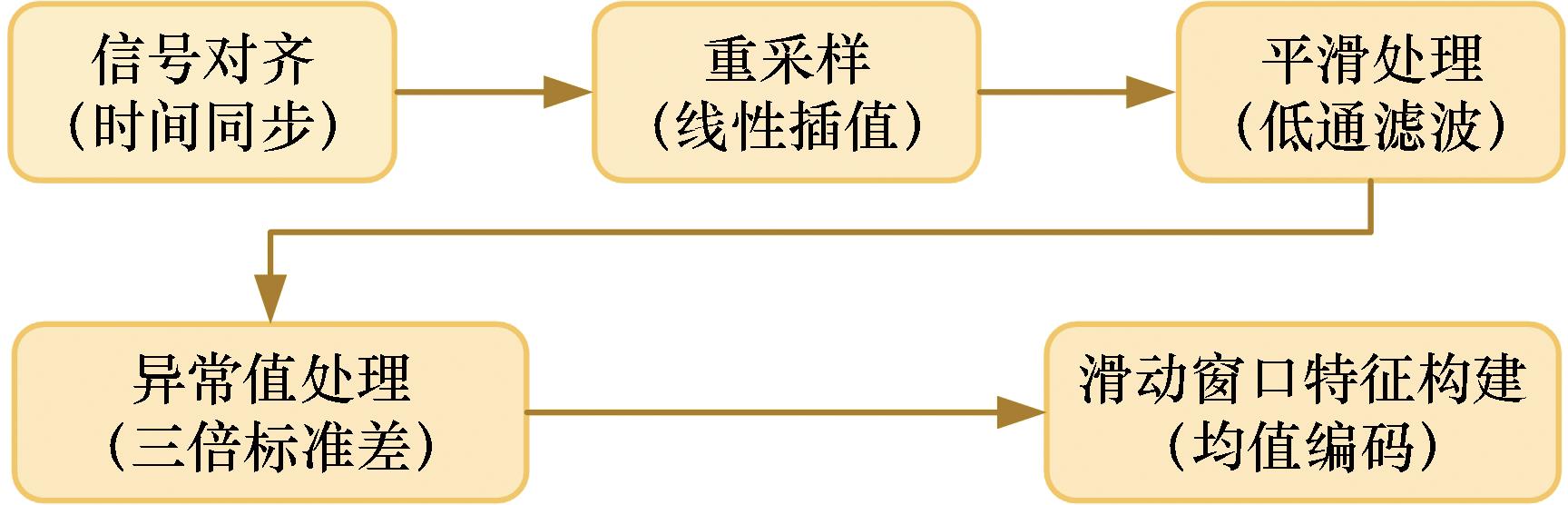
Fig.4 Flowchart of multi-source signal synchronization and power label construction
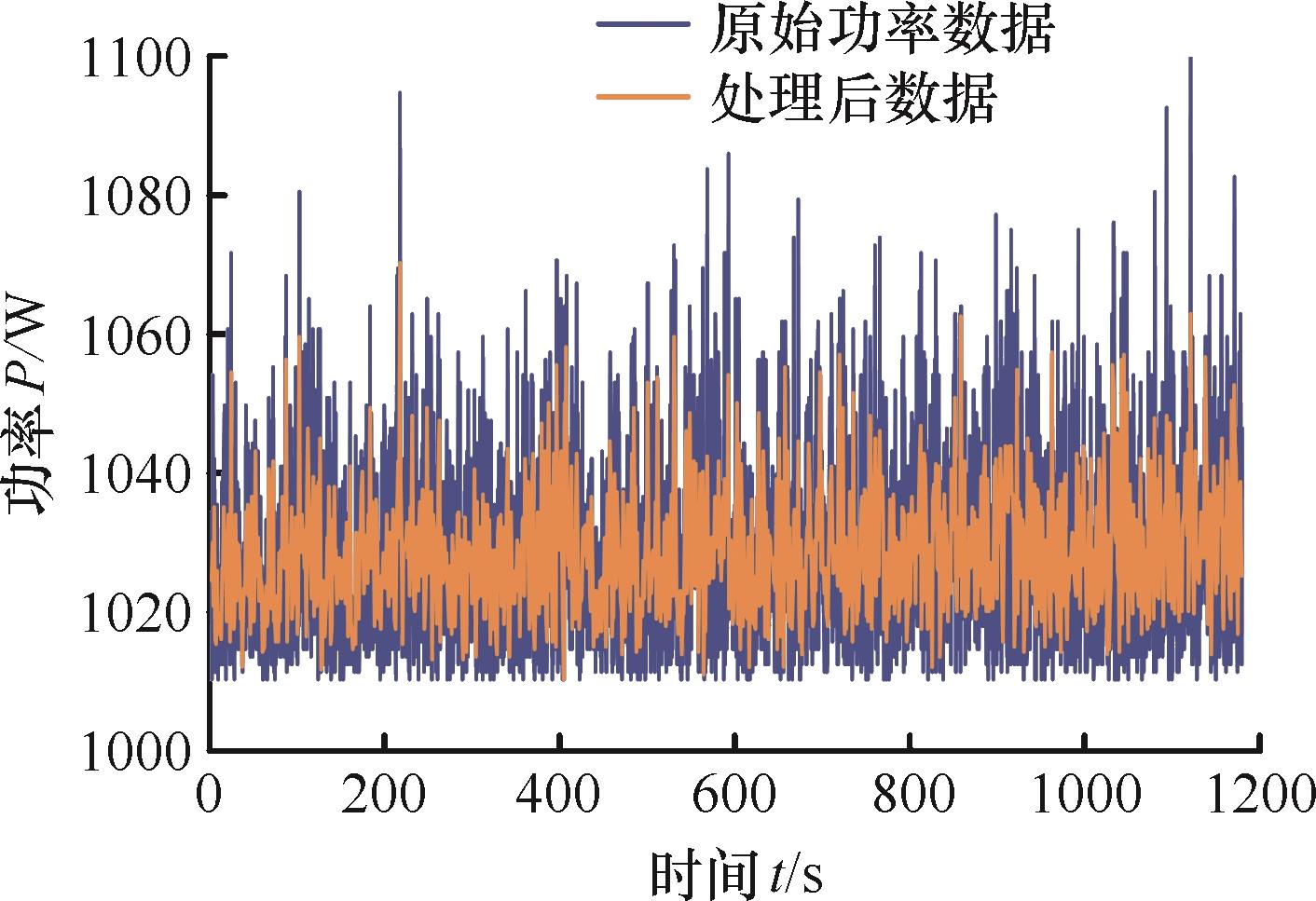
Fig.5 Comparison between raw power signal and sliding-window averaged power under a typical condition
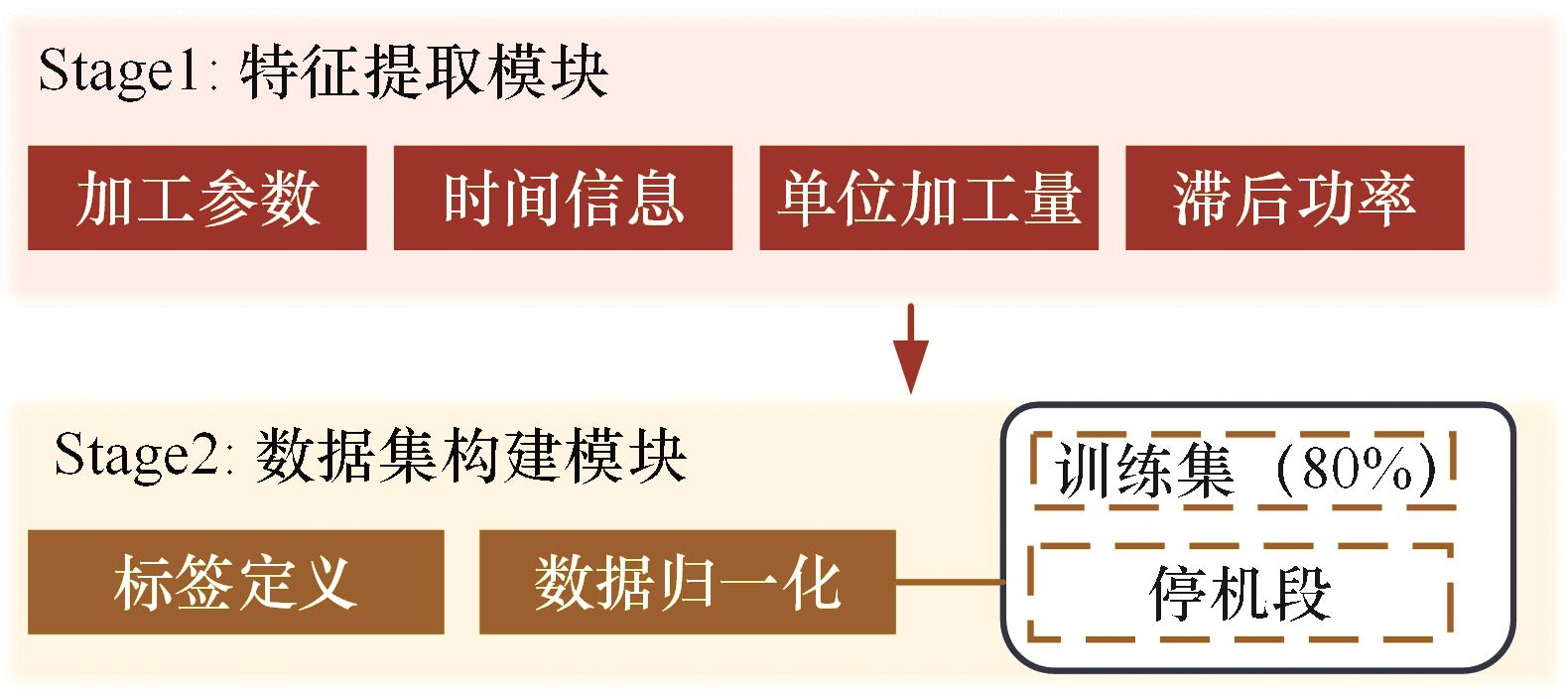
Fig.6 Flowchart of feature construction and data processing
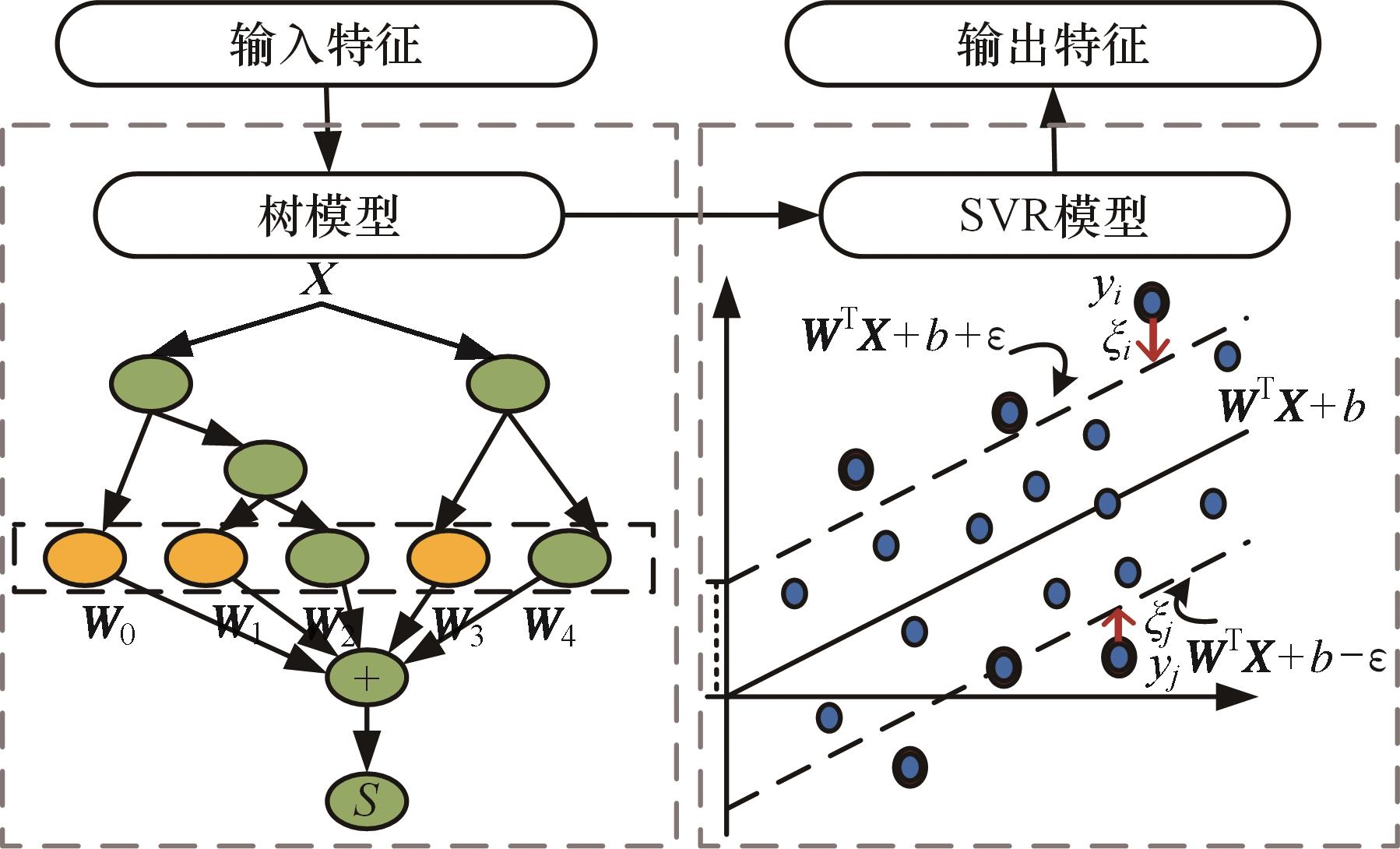
Fig.7 Integrated model structure
| 模型 | 关键参数 | 最终取值 | 参数说明 |
|---|---|---|---|
| RF | n_estimators | 150 | 弱学习器数量 |
| max_depth | 9 | 单棵树最大深度 | |
| min_samples_split | 10 | 内部节点最小 划分样本数 | |
| min_samples_leaf | 1 | 叶节点最小样 本数 | |
| GBRT | n_estimators | 120 | 弱学习器数量 |
| learning_rate | 0.3 | 学习率 | |
| max_depth | 3 | 单棵树最大深度 | |
| min_child_weight | 1 | 子节点最小样本权重 | |
| subsample | 0.6 | 行采样比例 | |
| colsample_bytree | 0.9 | 列采样比例 | |
| SVR | C | 100 | 惩罚系数 |
| gamma | 0.001 | RBF核函数宽度 | |
| epsilon | 0.1 | 不敏感区间宽度 | |
| MLP | hidden_layer_sizes | (100,) | 最优隐藏层结构 |
| alpha | 1.0 | L2正则化系数 | |
| learning_rate_init | 0.01 | 初始学习率 | |
RF+ SVR、GBRT+SVR | 第一层模型参数 | 同上 | RF或GBRT的最优参数 |
| 第二层模型参数 | SVR(C=100,γ=0.001,ε=0.1) | 仅对第一层预测残差建模 |
Tab.4 Core hyperparameter configurations of regression models
| 模型 | 关键参数 | 最终取值 | 参数说明 |
|---|---|---|---|
| RF | n_estimators | 150 | 弱学习器数量 |
| max_depth | 9 | 单棵树最大深度 | |
| min_samples_split | 10 | 内部节点最小 划分样本数 | |
| min_samples_leaf | 1 | 叶节点最小样 本数 | |
| GBRT | n_estimators | 120 | 弱学习器数量 |
| learning_rate | 0.3 | 学习率 | |
| max_depth | 3 | 单棵树最大深度 | |
| min_child_weight | 1 | 子节点最小样本权重 | |
| subsample | 0.6 | 行采样比例 | |
| colsample_bytree | 0.9 | 列采样比例 | |
| SVR | C | 100 | 惩罚系数 |
| gamma | 0.001 | RBF核函数宽度 | |
| epsilon | 0.1 | 不敏感区间宽度 | |
| MLP | hidden_layer_sizes | (100,) | 最优隐藏层结构 |
| alpha | 1.0 | L2正则化系数 | |
| learning_rate_init | 0.01 | 初始学习率 | |
RF+ SVR、GBRT+SVR | 第一层模型参数 | 同上 | RF或GBRT的最优参数 |
| 第二层模型参数 | SVR(C=100,γ=0.001,ε=0.1) | 仅对第一层预测残差建模 |
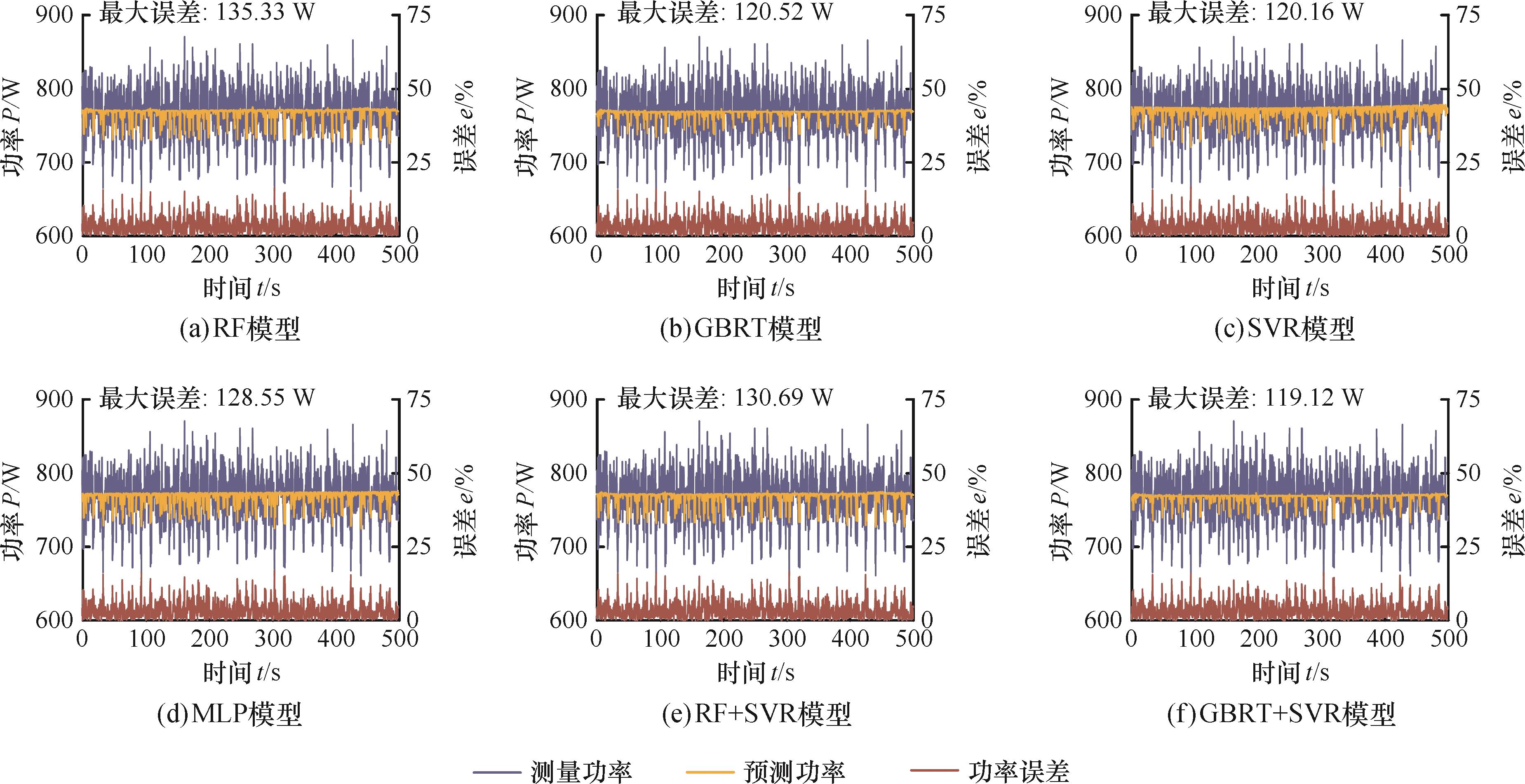
Fig.8 Power prediction curves and error profiles of six models under a typical machining condition
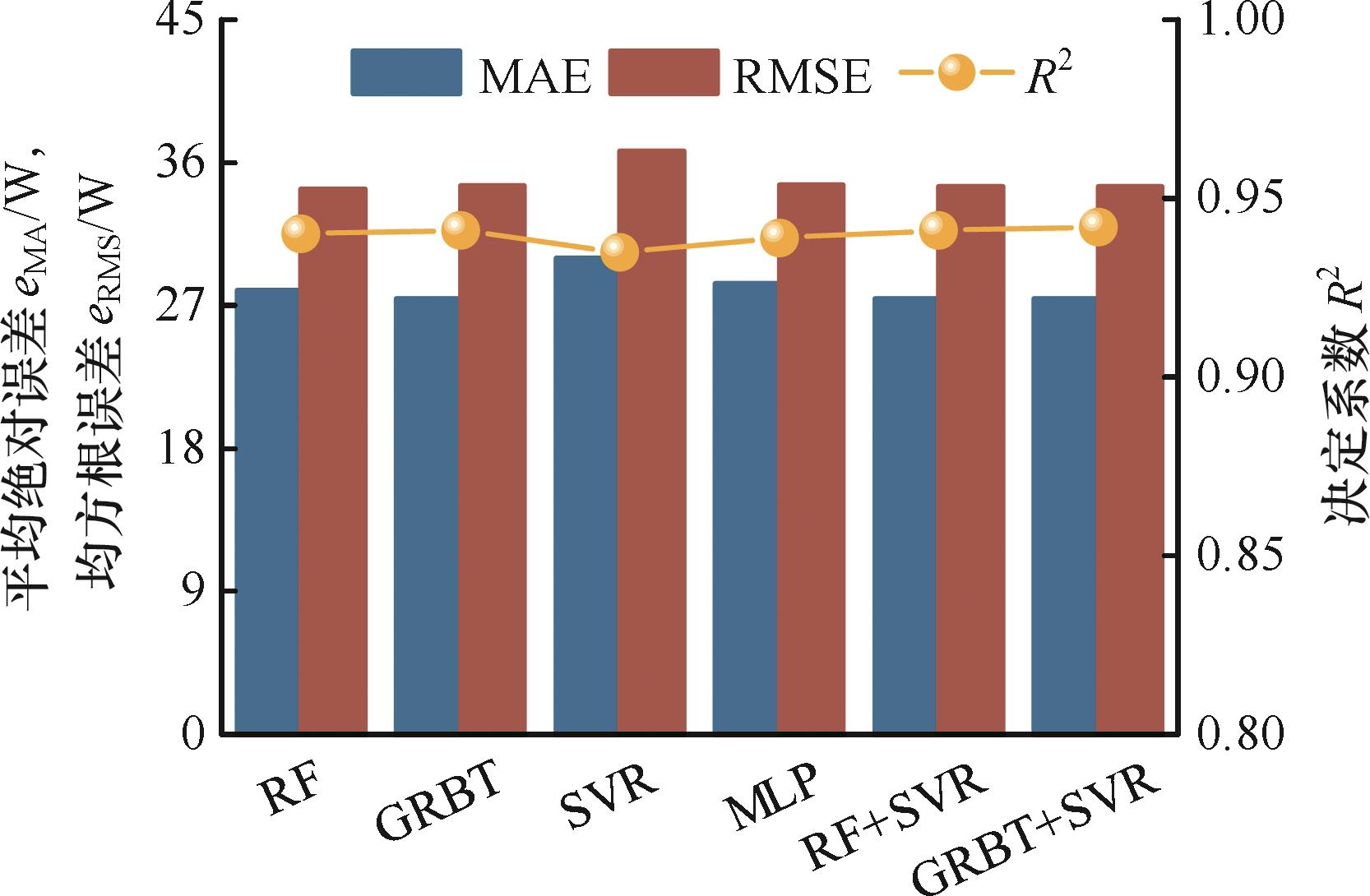
Fig.9 Power prediction performance of different models on the training set
| 模型名 | 平均绝对误差 | 标准差 |
|---|---|---|
| RF | 8.96 | 12.92 |
| GBRT | 9.83 | 9.98 |
| SVR | 13.11 | 12.65 |
| MLP | 4.91 | 6.40 |
| RF+SVR | 14.58 | 16.35 |
| GBRT+SVR | 8.09 | 10.50 |
Tab.5 Error metrics of different models for energy prediction on the training set
| 模型名 | 平均绝对误差 | 标准差 |
|---|---|---|
| RF | 8.96 | 12.92 |
| GBRT | 9.83 | 9.98 |
| SVR | 13.11 | 12.65 |
| MLP | 4.91 | 6.40 |
| RF+SVR | 14.58 | 16.35 |
| GBRT+SVR | 8.09 | 10.50 |
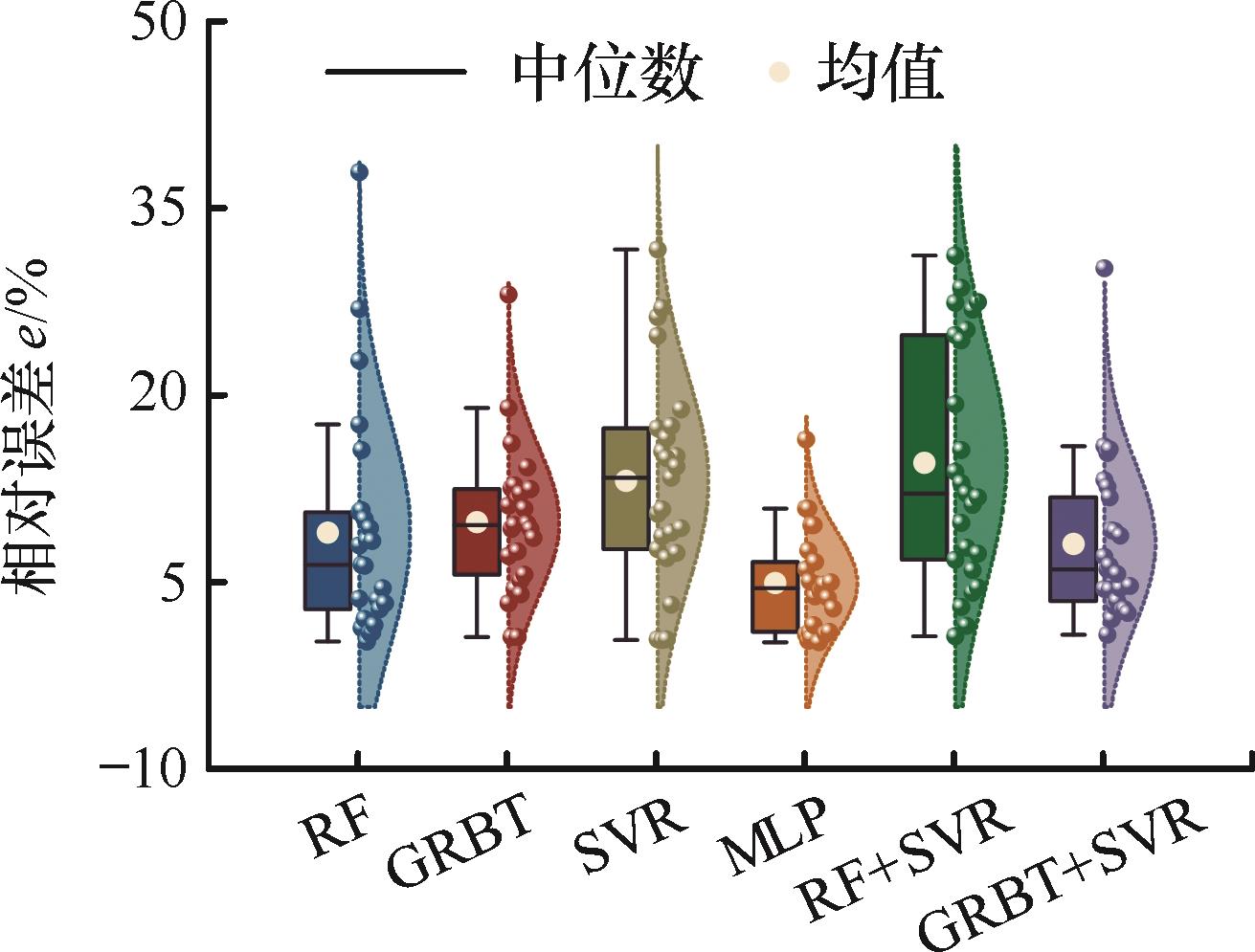
Fig.10 Violin-box plots of relative energy prediction errors for different models
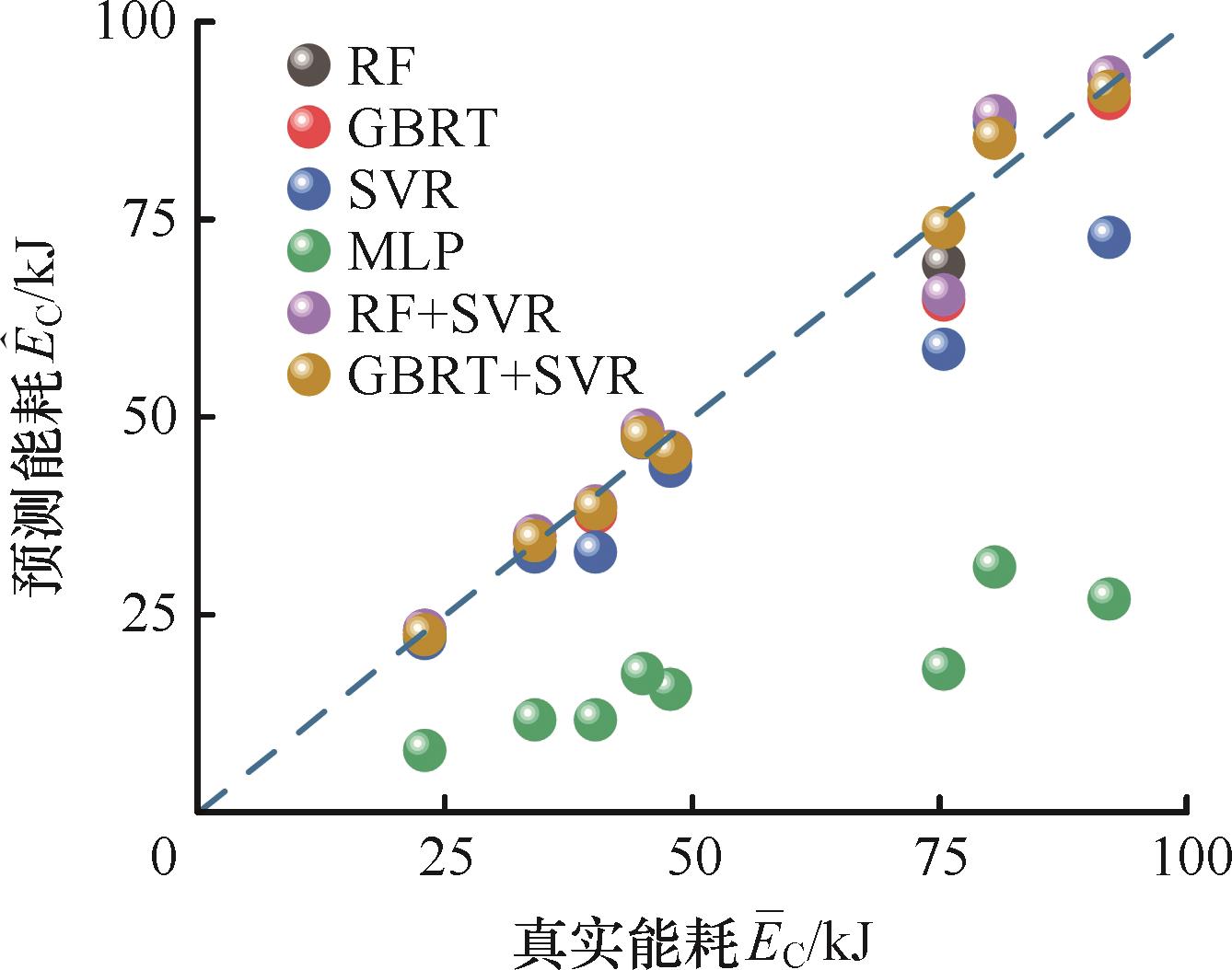
Fig.11 Scatter plot comparing measured and predicted energy consumption on the validation set
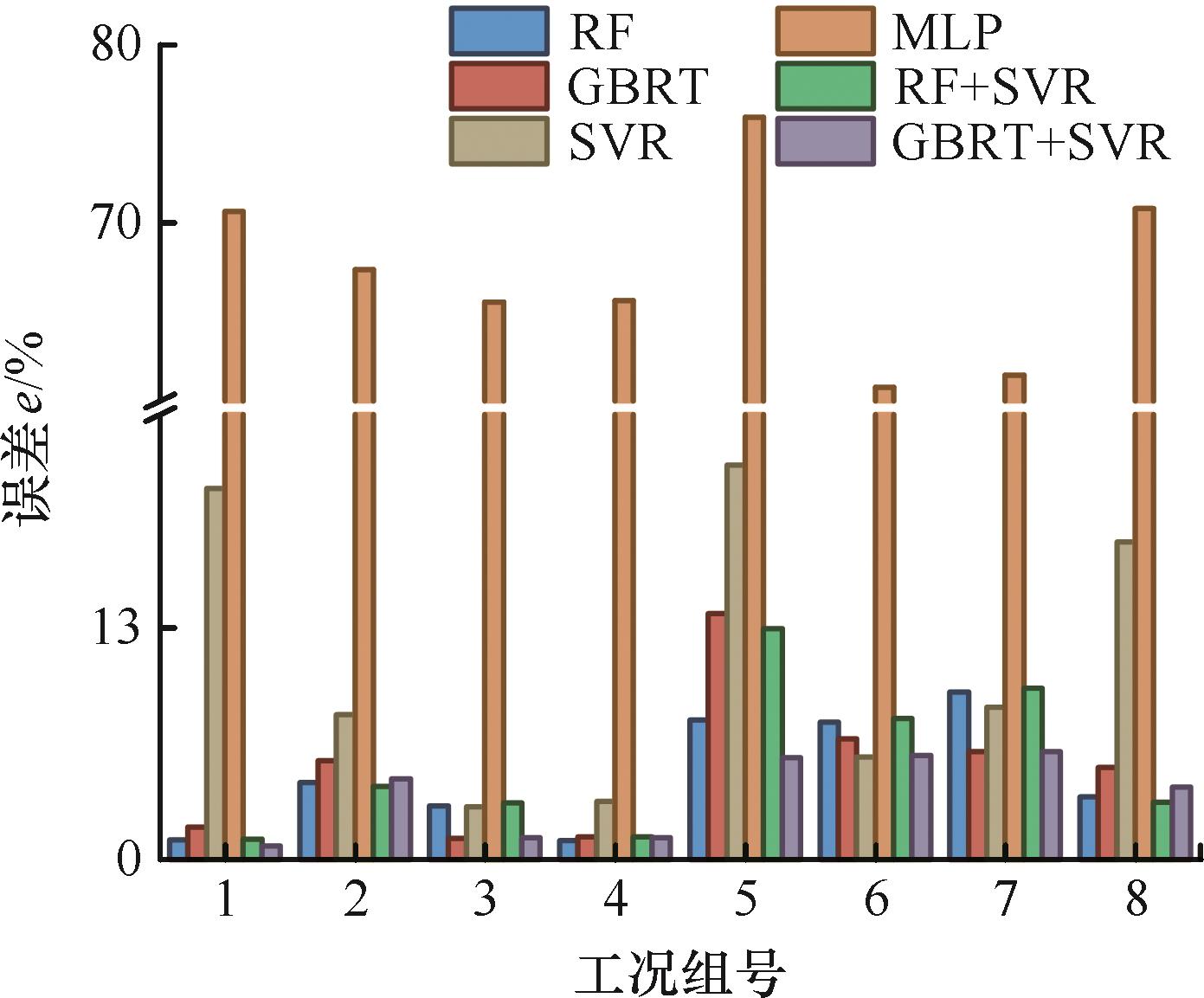
Fig.12 Absolute energy prediction errors of different models under eight validation conditions
| 模型名 | MAE | RMSE | 最小误差 | 最大误差 |
|---|---|---|---|---|
| RF | 4.74 | 6.01 | 9.36 | |
| GBRT | 5.35 | 7.26 | 6.06 | |
| SVR | 11.95 | 13.81 | 8.58 | |
| MLP | 67.77 | 67 | ||
| RF+SVR | 5.94 | 7.62 | 9.61 | |
| GBRT+SVR | 3.73 | 4.73 | 6.08 |
Tab.6 Error metrics of different models in the energy consumption verification and prediction task
| 模型名 | MAE | RMSE | 最小误差 | 最大误差 |
|---|---|---|---|---|
| RF | 4.74 | 6.01 | 9.36 | |
| GBRT | 5.35 | 7.26 | 6.06 | |
| SVR | 11.95 | 13.81 | 8.58 | |
| MLP | 67.77 | 67 | ||
| RF+SVR | 5.94 | 7.62 | 9.61 | |
| GBRT+SVR | 3.73 | 4.73 | 6.08 |
| [1] | WANG Enze, LEE C C, LI Yaya. Assessing the Impact of Industrial Robots on Manufacturing Energy Intensity in 38 Countries[J]. Energy Economics, 2022, 105: 105748. |
| [2] | 刘璐, 岳彩旭, 李子峰, 等. 面向切削加工的机床绿色化技术研究进展[J]. 制造技术与机床, 2026(1): 33-45. |
| LIU Lu, YUE Caixu, LI Zifeng, et al. Research Progress on Green Technologies for Machining-oriented Machine Tools[J]. Manufacturing Technology & Machine Tool, 2026(1): 33-45. | |
| [3] | CHEN Xingzheng, LI Congbo, TANG Ying, et al. Energy Efficient Cutting Parameter Optimization[J]. Frontiers of Mechanical Engineering, 2021, 16(2): 221-248. |
| [4] | 田威, 李鹏程, 缪云飞, 等. 大型复材薄壁构件工业机器人高精度原位铣边加工新方法[J]. 机械工程学报, 2025, 61(7): 120-133. |
| TIAN Wei, LI Pengcheng, MIAO Yunfei, et al. A New Method for High-precision In-situ Milling Edge Processing of Industrial Robots for Large Composite Thin-walled Components[J]. Journal of Mechanical Engineering, 2025, 61(7): 120-133. | |
| [5] | CHENG Xuhui, YIN Fangchen, WEN Congwei, et al. Energy Prediction and Optimization for Robotic Stereoscopic Statue Processing[J]. Scientific Reports, 2025, 15: 8544. |
| [6] | 庹军波, 彭秋媛, 张贤明, 等. 工业机器人能耗预测研究[J]. 中国机械工程, 2022, 33(22): 2727-2732. |
| JunboTUO, PENG Qiuyuan, ZHANG Xianming, et al. Energy Consumption Prediction Method for Industrial Robots[J]. China Mechanical Engineering, 2022, 33(22): 2727-2732. | |
| [7] | GADALETA M, BERSELLI G, PELLICCIARI M, et al. Extensive Experimental Investigation for the Optimization of the Energy Consumption of a High Payload Industrial Robot with Open Research Dataset[J]. Robotics and Computer-Integrated Manufacturing, 2021, 68: 102046. |
| [8] | HOVGARD M, LENNARTSON B, BENGTSSON K. Applied Energy Optimization of Multi-robot Systems through Motion Parameter Tuning[J]. CIRP Journal of Manufacturing Science and Technology, 2021, 35: 422-430. |
| [9] | ZHANG Mingyang, YAN Jihong. A Data-driven Method for Optimizing the Energy Consumption of Industrial Robots[J]. Journal of Cleaner Production, 2021, 285: 124862. |
| [10] | 余坼操,朱学军,杨旭东,等. 面向多工位多机器人焊接任务的多目标优化方法[J/OL]. 机械科学与技术. . |
| YU Checao, ZHU Xuejun, YANG Xudong, et al. Multi-objective Optimization Method for Multi-station and Multi-Robot Welding Tasks [J/OL]. Mechanical Science and Technology. . | |
| [11] | ZHOU Jin, YI Hao, CAO Huajun, et al. Structural Decomposition-based Energy Consumption Modeling of Robot Laser Processing Systems and Energy-efficient Analysis[J]. Robotics and Computer-Integrated Manufacturing, 2022, 76: 102327. |
| [12] | 黄吉祥, 尹方辰, 黄身桂, 等. 机器人石材雕刻粗加工能耗建模与优化分析[J]. 华侨大学学报(自然科学版), 2024, 45(4): 471-477. |
| HUANG Jixiang, YIN Fangchen, HUANG Shengui, et al. Modeling and Optimization Analysis of Energy Consumption in Rough Machining of Robotic Stone Carving[J]. Journal of Huaqiao University (Natural Science), 2024, 45(4): 471-477. | |
| [13] | 周进. 基于时间尺度函数的工业机器人加工系统节能优化方法与典型应用研究[D]. 重庆: 重庆大学, 2022. |
| ZHOU Jin. Time-scaling-based Energy-saving Optimization Method and Typical Application Study of Robot Machining System[D]. Chongqing: Chongqing University, 2022. | |
| [14] | 栾利强. 考虑变材料去除率过程功率动态特性的石材加工能耗建模研究与应用[D]. 青岛: 青岛大学, 2021. |
| LUAN Liqiang. Research and Application of Energy Consumption Modeling in Stone Processing Considering Dynamic Characteristics of Process Power for Variable Material Removal Rate [D]. Qingdao: Qingdao University, 2021. | |
| [15] | 梅术龙,谢阳,张超勇,等. 精密铣削机床效能孪生模型构建及动态优化方法[J]. 中国机械工程, 2026, 37(4): 875-884. |
| Mei Shulong, Xie Yang, Zhang Chaoyong, et al. Construction and Dynamic Optimization Method of Efficiency Twin Model for Precision Milling Machine Tools [J]. China Mechanical Engineering, 2026, 37(4): 875-884. | |
| [16] | BRILLINGER M, WUWER M, SMAJIC B, et al. Novel Method to Predict the Energy Consumption of Machined Parts in the Design Phase to Attain Sustainability Goals[J]. Journal of Manufacturing Processes, 2023, 101: 1046-1054. |
| [17] | LIMA R C C, de OLIVEIRA L A V, Da SILVA S P P, et al. A New Proposal for Energy Efficiency in Industrial Manufacturing Systems Based on Machine Learning Techniques[J]. Journal of Manufacturing Systems, 2024, 77: 1062-1076. |
| [18] | AWAN M R, GONZÁLEZ ROJAS H A, HAMEED S, et al. Machine Learning-based Prediction of Specific Energy Consumption for Cut-off Grinding[J]. Sensors, 2022, 22(19): 18. |
| [19] | 谢阳, 戴逸群, 张超勇, 等. 融合集成模型与深度学习的机床能耗识别与预测方法[J]. 中国机械工程, 2023, 34(24): 2963-2974. |
| XIE Yang, DAI Yiqun, ZHANG Chaoyong, et al. A Method for Identifying and Predicting Energy Consumption of Machine Tools by Combining Integrated Models and Deep Learning[J]. China Mechanical Engineering, 2023, 34(24): 2963-2974. | |
| [20] | 陶进煊. 基于机理和数据驱动混合的数控铣削能效预测与优化研究[D]. 合肥: 合肥工业大学, 2024. |
| TAO Jinxuan. Research on Energy Efficiency Prediction and Optimization of CNC Milling Based on Hybrid of Mechanism and Data-drive[D]. Hefei: Hefei University of Technology, 2024. |
| [1] | WANG Liming, XIAO Xingyuan, LI Fangyi, WANG Xiaoguang, LI Jianfeng, NIE Yanyan, LIU Weitong, LI Liuyuan, WANG Yitong, WANG Boyun, CUI Yuqi. Overview and Prospects of Data-driven Low-carbon Design and Manufacturing of Electromechanical Products [J]. China Mechanical Engineering, 2026, 37(4): 764-779. |
| [2] | XIAO Wei, ZHANG Cong, CHEN Xubing. Energy Consumption Prediction of Industrial Robots Based on Bayesian Optimized Temporal Convolutional Network [J]. China Mechanical Engineering, 2026, 37(4): 831-836. |
| [3] | Liangliang YANG, Hong CHEN, Wenqi LU. Kernel Regularization Optimal Iterative Learning Control Based on Trajectory Learning under Actuator Constraints [J]. China Mechanical Engineering, 2025, 36(10): 2274-2283. |
| [4] | Congbo LI, Hewang ZHAI, Wei WU, Ke DONG, Xiangfei ZHANG. Energy Consumption Anomaly Detection of Automobile Painting Drying System Based on TCN-GAT and Hybrid Neural Network [J]. China Mechanical Engineering, 2025, 36(08): 1864-1874. |
| [5] | GUO Feiyan1, ZHANG Hui2, SONG Changjie1, ZHANG Shuo1. Identification and Evaluation of Key Error Elements in Complex Composite Aviation Componts Assembly Driven by Mechanism and Data Model Fusion [J]. China Mechanical Engineering, 2025, 36(07): 1530-1543. |
| [6] | YANG Yu1, 2, LI Xiaolei2, TAO Yourui1, 2, GUO Qiyu1, 2, YE Nan1, 2. Accelerated Load Spectrum Preparation for RV Reducer Service Conditions [J]. China Mechanical Engineering, 2025, 36(06): 1170-1177. |
| [7] | GAO Guanbin1, 2, ZHAO Siguo1, 2, LI Yingjie1, 2. Modeling and Identification of Robot End-payloads Based on Joint Torque Balance [J]. China Mechanical Engineering, 2025, 36(06): 1188-1197. |
| [8] | ZHAO Peirui1, DENG Chao1, ZHU Bo1, YAN Wenbin1, LIANG Min2, CHEN Min2. Modelling and Optimisation of Dynamic Scheduling in Chinese Materia Medica Pharmaceuticals Workshops Based on Multiple Motivation Drivers [J]. China Mechanical Engineering, 2025, 36(06): 1247-1260,1299. |
| [9] | LI Lucheng, WANG Zhenzhong, HUANG Xuepeng. Research on Constant Force Control System of Robot Bonnet Polishing Based on Fuzzy Impedance Control [J]. China Mechanical Engineering, 2025, 36(05): 1028-1034. |
| [10] | WANG Guirong, NI Zhiqiang, ZHOU Kun, WANG Binrui. Time-optimal Trajectory Planning of Robotic Arms Based on MIPSO Algorithm [J]. China Mechanical Engineering, 2025, 36(05): 1044-1053. |
| [11] | ZHANG Daode, LU Zijian, ZHAO Kun, YANG Zhiyong. Research on Multi-objective Path Planning Method for Tracked Robots under Non-flat Environments [J]. China Mechanical Engineering, 2025, 36(02): 305-314. |
| [12] | YAN Wei1, 3, WANG Xinyi2, 3, ZHANG Hua3, ZHU Shuo2, 3, JIANG Zhigang2, 3. Optimization Decision of CFRP Processing Parameters Considering Cutting Energy Consumption and Surface Quality [J]. China Mechanical Engineering, 2024, 35(10): 1834-1844. |
| [13] | CHANG Daliang1, 2, 3, SHI Haibo1, 2, LIU Chang1, 2. Multi-objective Scheduling Optimization for Hybrid Flow Shops with Limited Waiting Time and High Energy Consumption [J]. China Mechanical Engineering, 2024, 35(07): 1269-1278. |
| [14] | JIANG Jiguang, HOU Jue, SU Chengzhi, BA Qijiao, TIAN Aixin, XU Mingyu. Research on Optimal Pose Set Planning Method under Physical Constraint Robot Kinematics Calibration [J]. China Mechanical Engineering, 2024, 35(03): 472-480. |
| [15] | CHEN Zhuofan, ZHOU Kun, QIN Feifei, WANG Binrui. Inverse Kinematics Solution of Robots Based on IQPSO Algorithm [J]. China Mechanical Engineering, 2024, 35(02): 293-304. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||