

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (1): 233-242.DOI: 10.3969/j.issn.1004-132X.2026.01.024
Previous Articles Next Articles
ZHAO Dingxuan1( ), GUO Rui1,2, WANG Shuo3, YAN Changchang1,2, WANG Zihe1, ZHANG Tianci1,2()
), GUO Rui1,2, WANG Shuo3, YAN Changchang1,2, WANG Zihe1, ZHANG Tianci1,2()
Received:2024-11-07
Online:2026-01-25
Published:2026-02-05
Contact:
ZHANG Tianci
赵丁选1(), 郭瑞1,2, 王硕3, 闫长长1,2, 王子鹤1, 张天赐1,2()
通讯作者:
张天赐
作者简介:赵丁选,男,1965年生,教授,博士研究生导师。研究方向为机械系统动力学及其仿真与控制。发表论文300余篇。E-mail: zdx@ysu.edu.cn基金资助:CLC Number:
ZHAO Dingxuan, GUO Rui, WANG Shuo, YAN Changchang, WANG Zihe, ZHANG Tianci. Body Posture Planning Method for Unmanned Walking Excavators under Complex Terrain Environments[J]. China Mechanical Engineering, 2026, 37(1): 233-242.
赵丁选, 郭瑞, 王硕, 闫长长, 王子鹤, 张天赐. 复杂地形环境下无人步履式挖掘机的车身姿态规划方法[J]. 中国机械工程, 2026, 37(1): 233-242.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.01.024
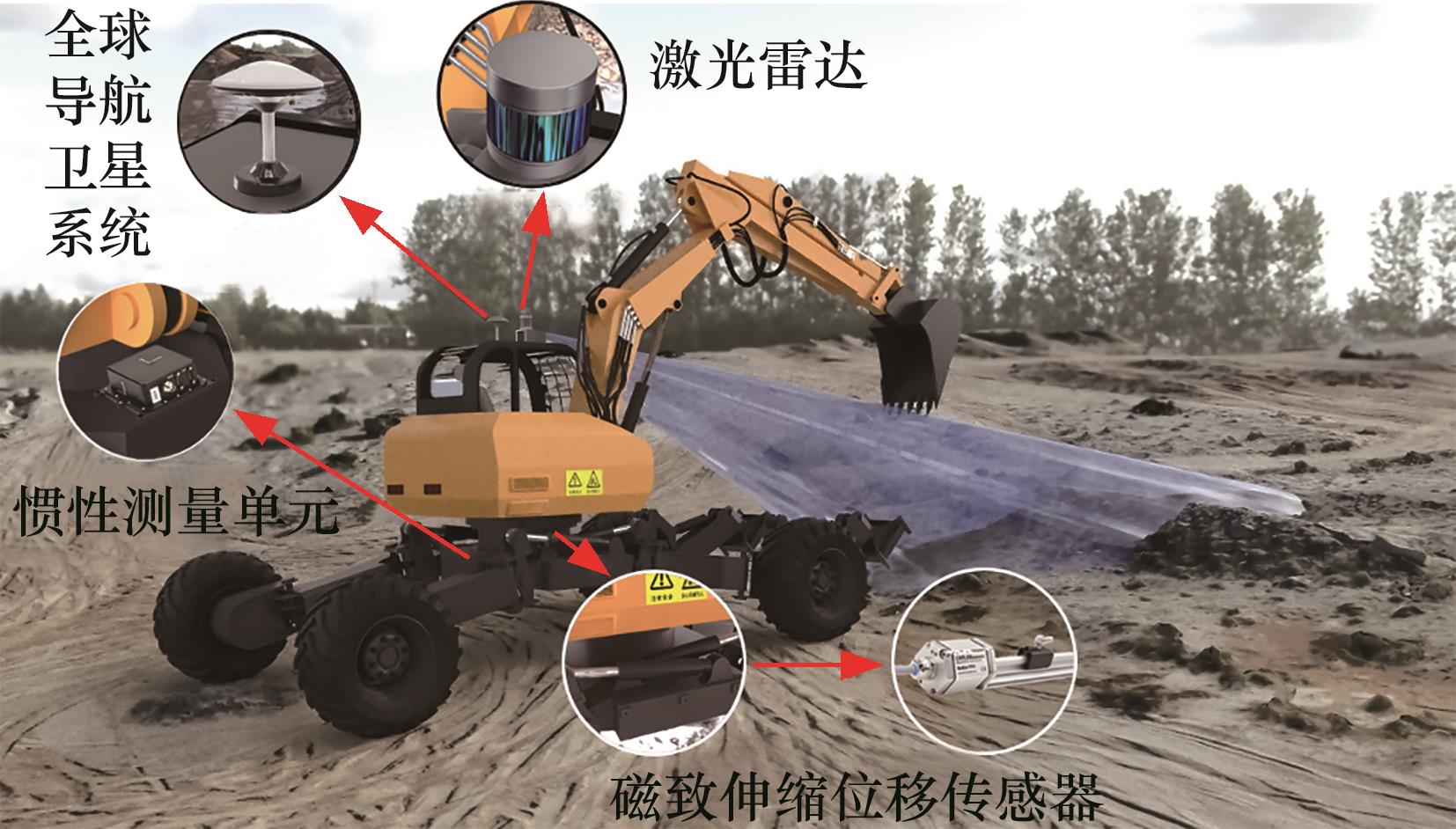
Fig.1 A typical framework of the UWE
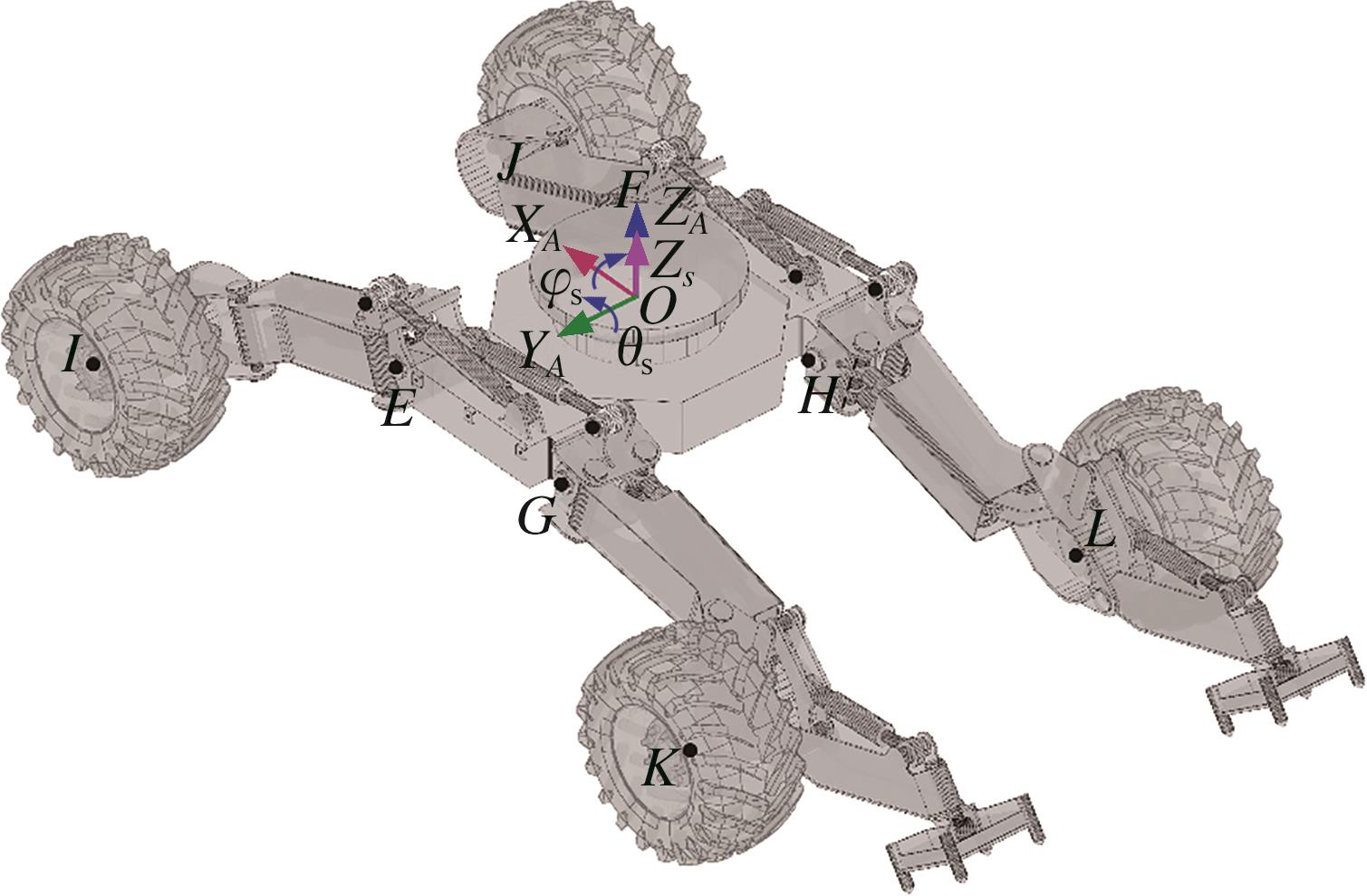
Fig.2 Coordinate system of the UWE
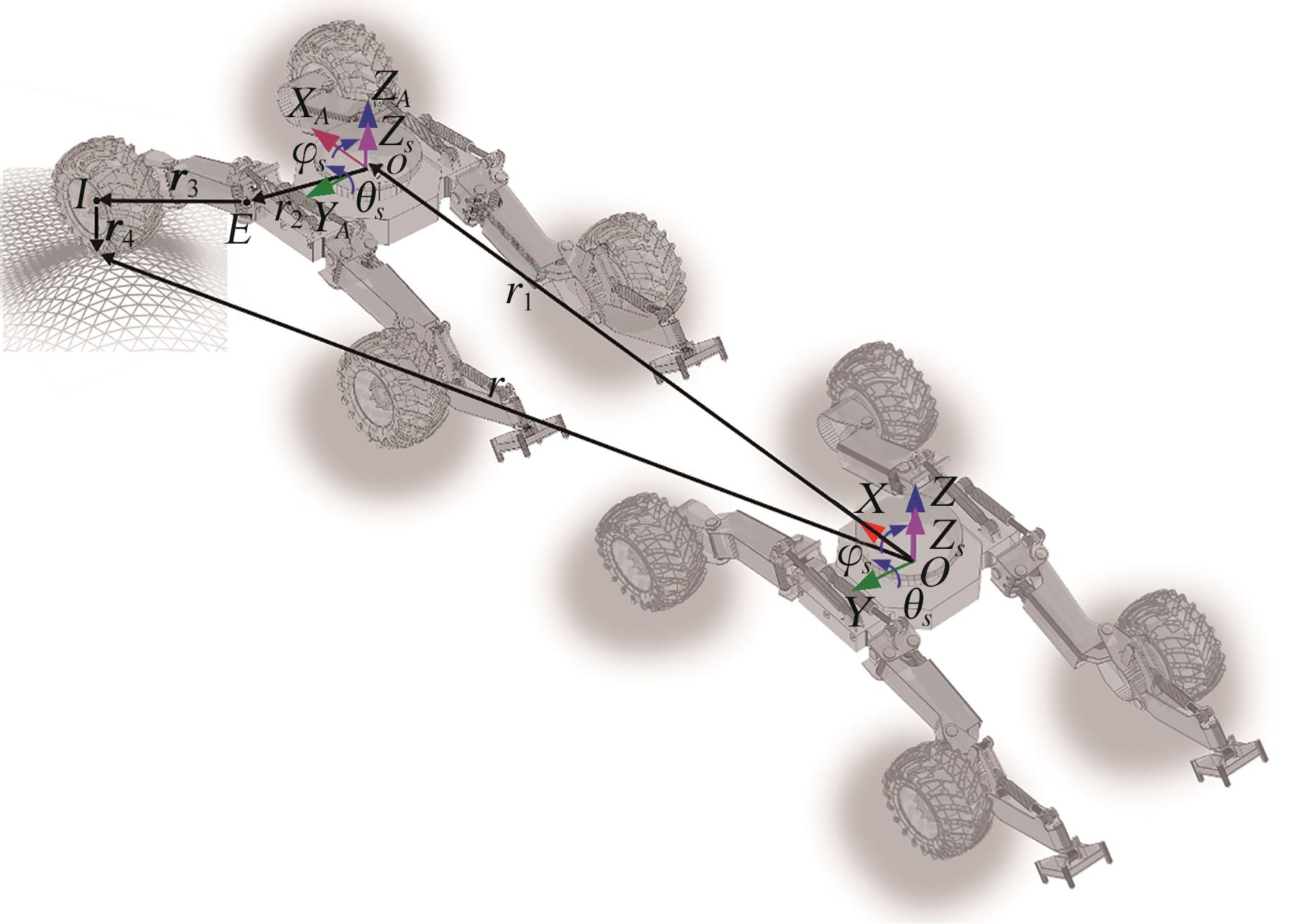
Fig.3 7-DoF kinematics model of the UWE
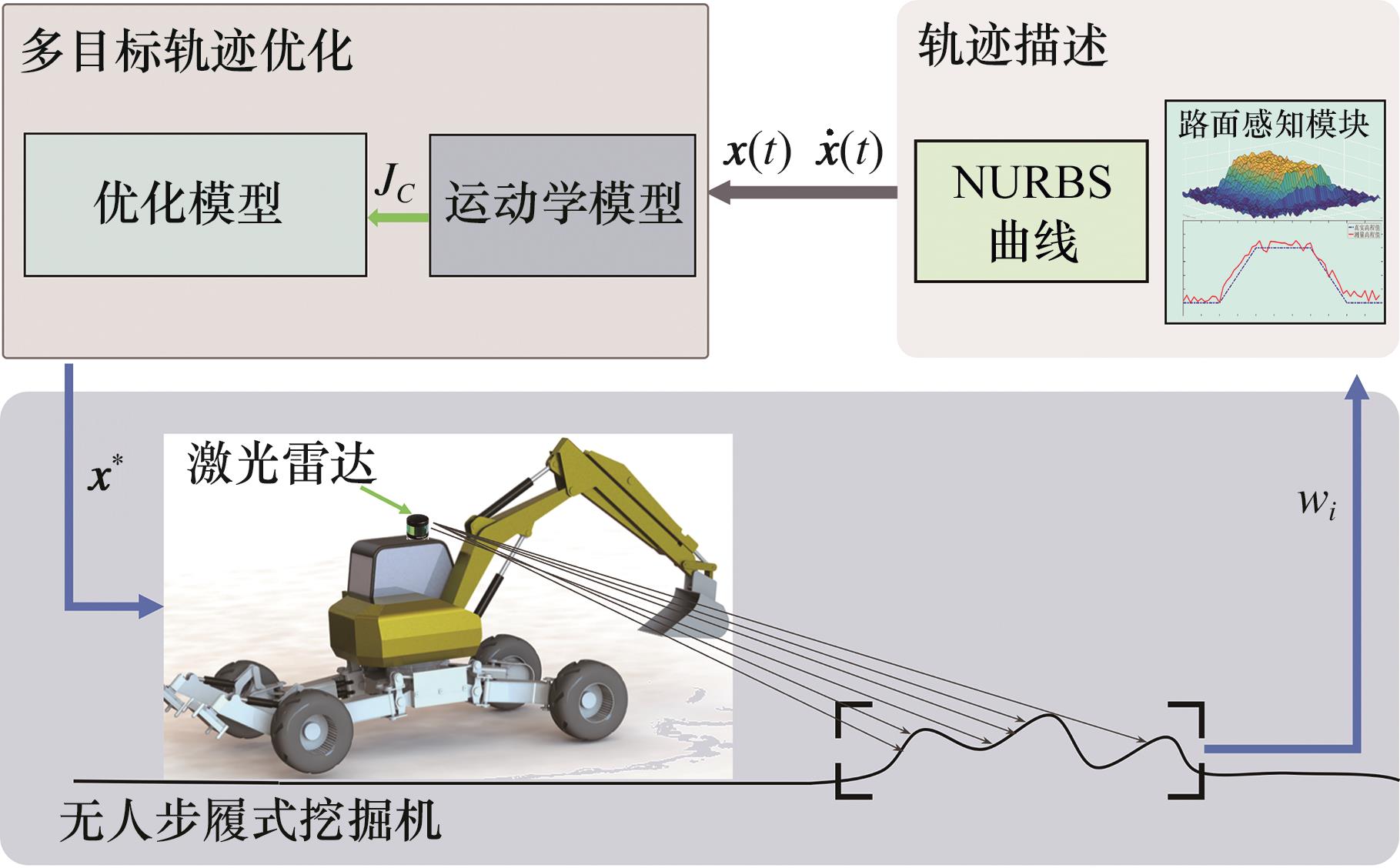
Fig.4 Schematic diagram of optimization process
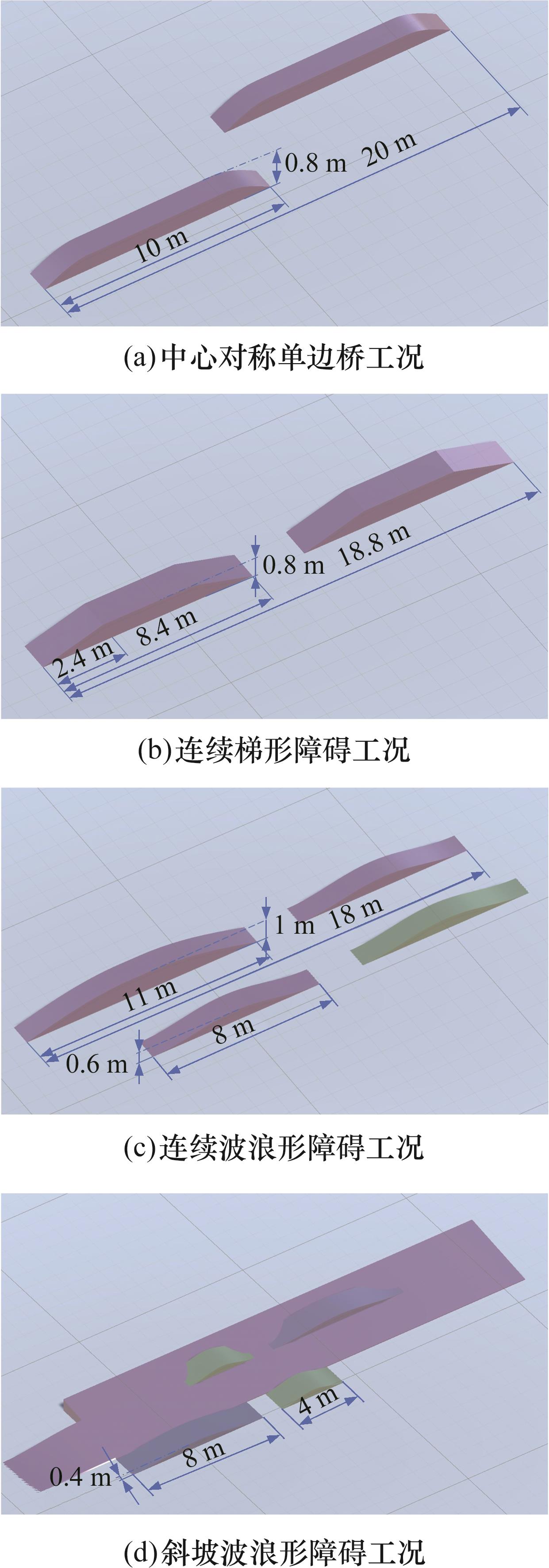
Fig.5 Four typical obstacle conditions
| la | lb | lc | lleg | R |
|---|---|---|---|---|
| 0.50 | 0.78 | 3.01 | 1.66 | 0.60 |
Tab.1 Values of structure parameters of the UWE
| la | lb | lc | lleg | R |
|---|---|---|---|---|
| 0.50 | 0.78 | 3.01 | 1.66 | 0.60 |
| θ/(°) | vu/(m·s | θs/(°) | φs/(°) | |||
|---|---|---|---|---|---|---|
| 上限 | 25 | 0.08 | 0.1 | 3 | 3 | 0.3 |
| 下限 |
Tab.2 The upper and lower limits of the constraints
| θ/(°) | vu/(m·s | θs/(°) | φs/(°) | |||
|---|---|---|---|---|---|---|
| 上限 | 25 | 0.08 | 0.1 | 3 | 3 | 0.3 |
| 下限 |
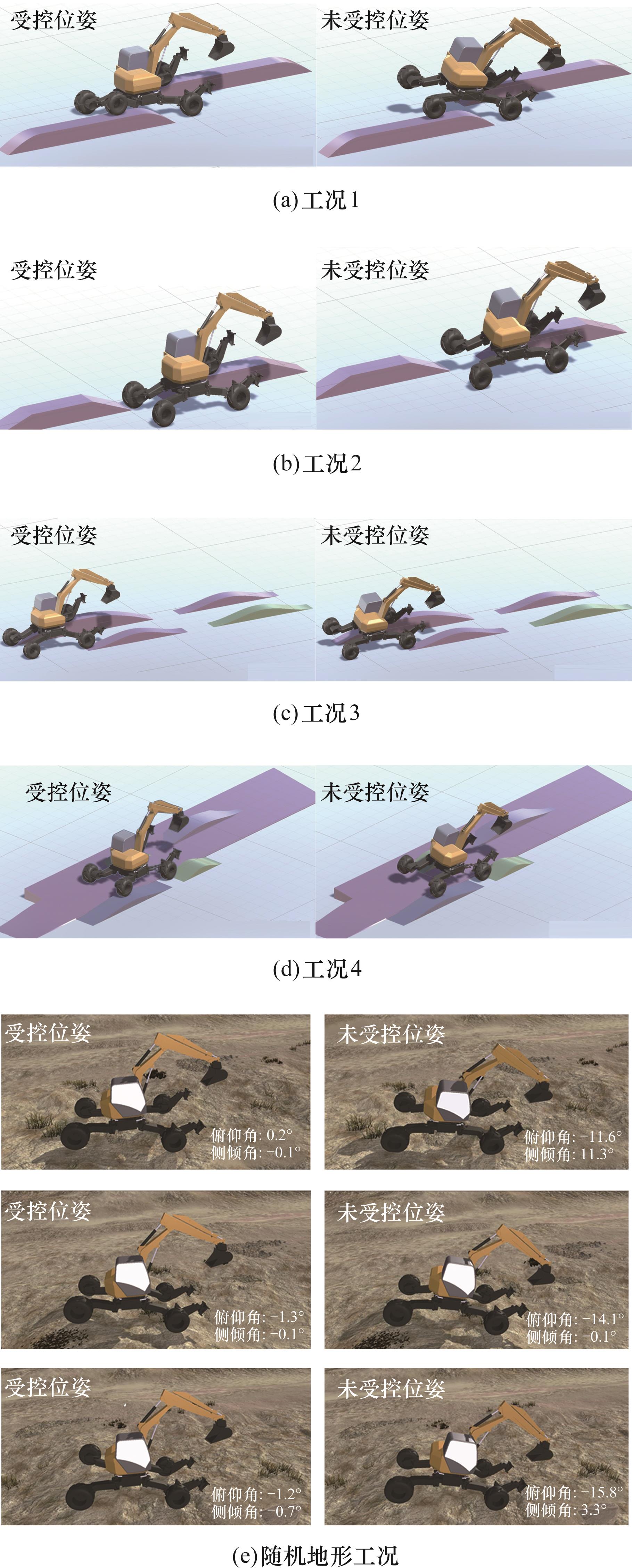
Fig.6 Comparison of the motion process of the controlled and uncontrolled
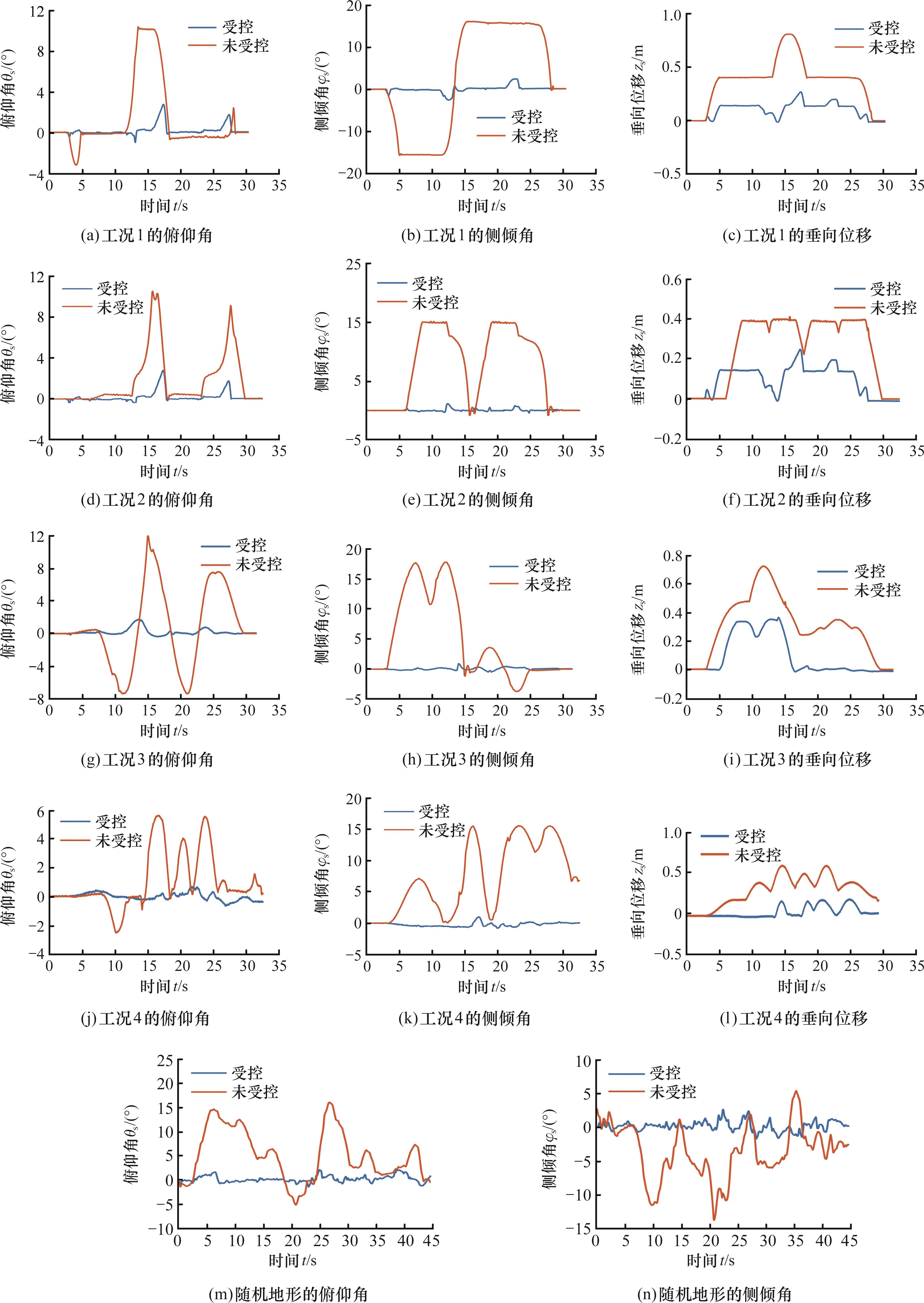
Fig.7 Controlled and uncontrolled vehicle body attitudes under different scenarios
| 工况 | 姿态 | 均值减小率 | 峰值减小率 |
|---|---|---|---|
| 中心对称单边桥 | θs | 78.87 | 73.18 |
| φs | 88.40 | 84.06 | |
| zs | 68.03 | 66.57 | |
| 连续梯形 | θs | 83.63 | 73.14 |
| φs | 89.20 | 92.30 | |
| zs | 61.42 | 40.01 | |
| 连续波浪 | θs | 80.05 | 85.15 |
| φs | 86.21 | 94.81 | |
| zs | 70.41 | 49.72 | |
| 斜坡波浪 | θs | 74.40 | 87.42 |
| φs | 89.23 | 93.48 | |
| zs | 76.58 | 70.94 | |
| 随机地形 | θs | 84.84 | 86.61 |
| φs | 80.96 | 80.80 |
Tab.3 Optimized results of 5 scenarios
| 工况 | 姿态 | 均值减小率 | 峰值减小率 |
|---|---|---|---|
| 中心对称单边桥 | θs | 78.87 | 73.18 |
| φs | 88.40 | 84.06 | |
| zs | 68.03 | 66.57 | |
| 连续梯形 | θs | 83.63 | 73.14 |
| φs | 89.20 | 92.30 | |
| zs | 61.42 | 40.01 | |
| 连续波浪 | θs | 80.05 | 85.15 |
| φs | 86.21 | 94.81 | |
| zs | 70.41 | 49.72 | |
| 斜坡波浪 | θs | 74.40 | 87.42 |
| φs | 89.23 | 93.48 | |
| zs | 76.58 | 70.94 | |
| 随机地形 | θs | 84.84 | 86.61 |
| φs | 80.96 | 80.80 |
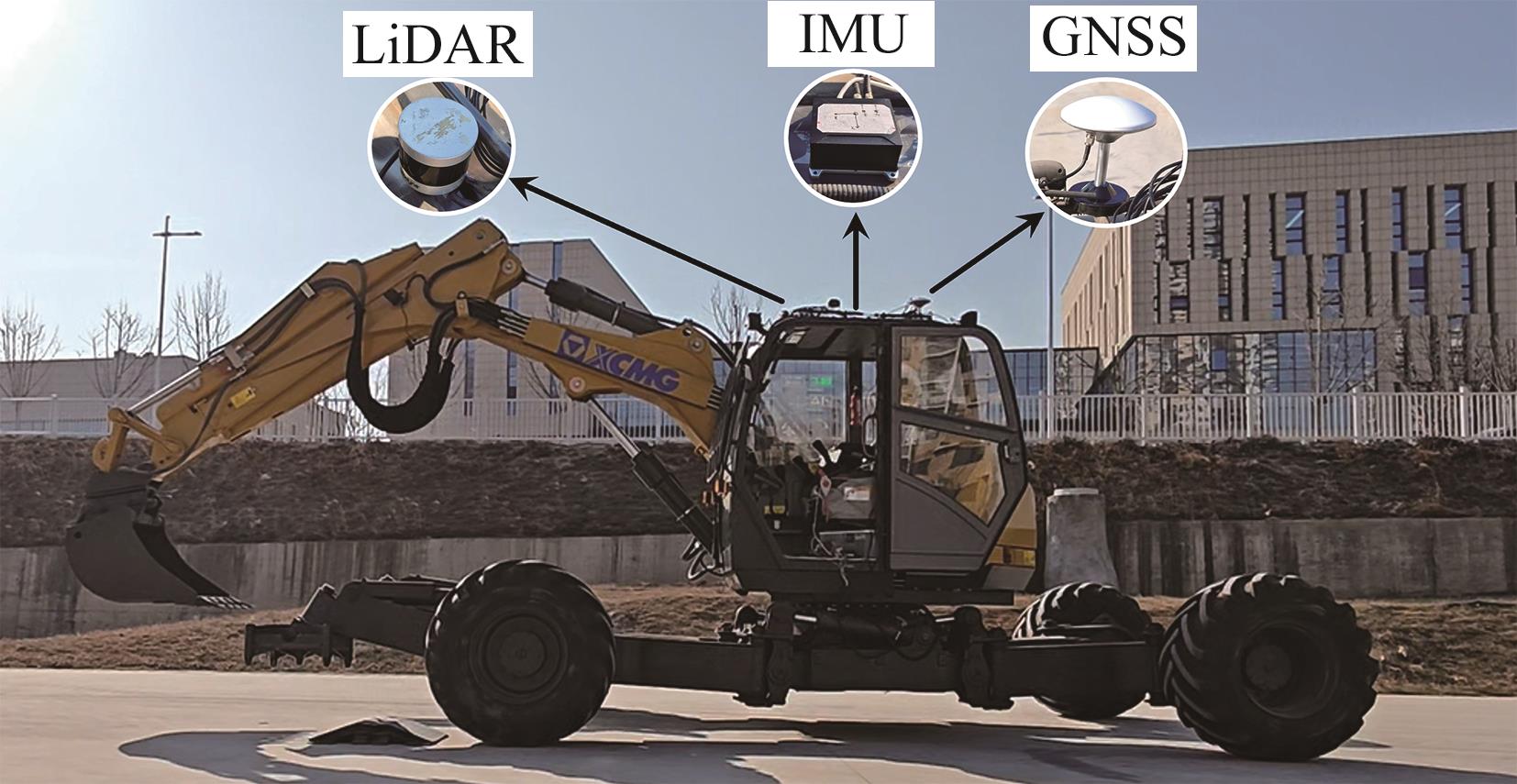
Fig.8 The sensors equipped on the UWE

Fig.9 Comparison of the UWE overcoming obstacles in two mode
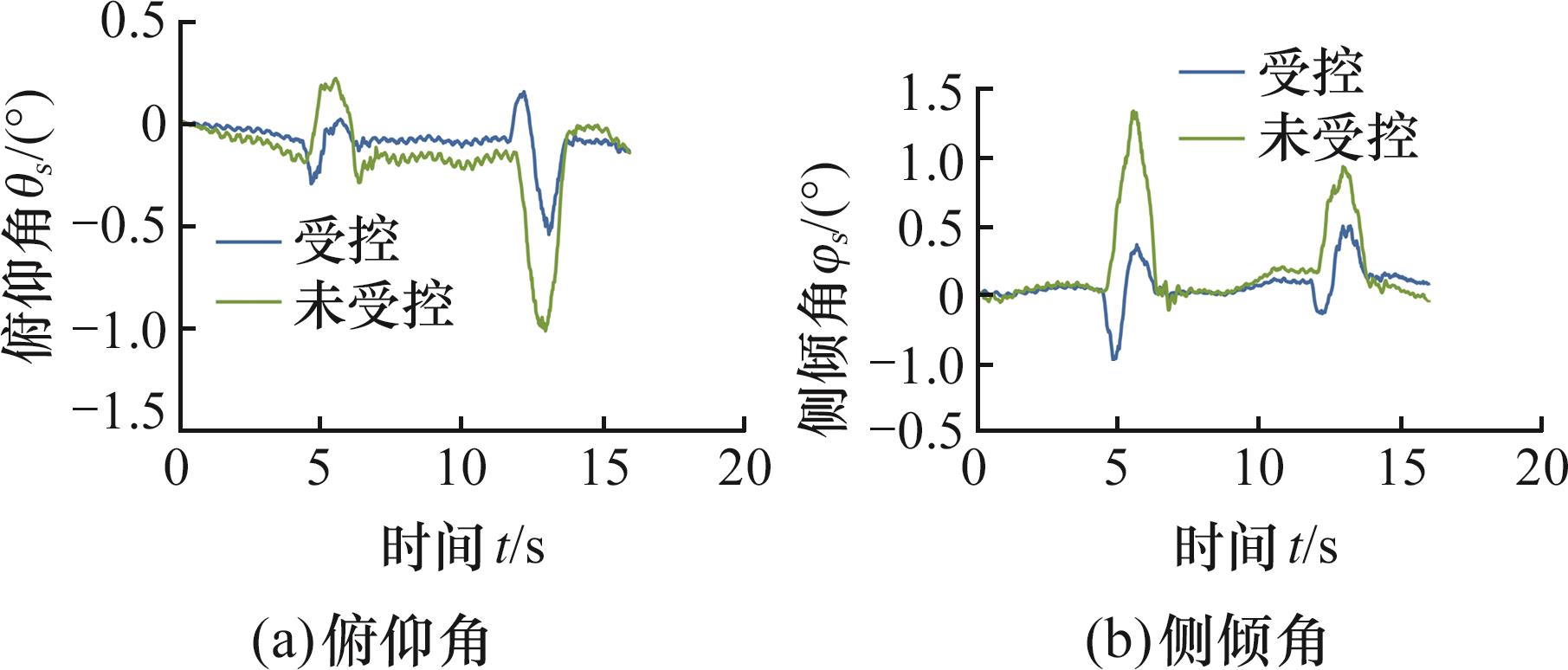
Fig.10 Vehicle body attitude in real-world operation
| [1] | 张云, 张杰, 魏宇明. 国内外步履式挖掘机的发展及现状[J]. 建设机械技术与管理, 2020, 33(3): 67-70. |
| ZHANG Yun, ZHANG Jie, WEI Yuming. Development and Present Situation of Walking Excavators at Home and Abroad[J]. Construction Machinery Technology & Management, 2020, 33(3): 67-70. | |
| [2] | 张云. 一种步履式挖掘机的设计与研制[D]. 西安: 长安大学, 2016. |
| ZHANG Yun. Design and development of a walking excavator[D]. Xi'an: Changan University, 2016. | |
| [3] | BABU A, KIRCHNER F. Terrain Adaption Controller for a Walking Excavator Robot Using Deep Reinforcement Learning[C]∥2021 20th International Conference on Advanced Robotics (ICAR). Ljubljana, 2021: 64-70. |
| [4] | 张鑫. 智能型步履式挖掘机动态稳定性分析[D]. 大庆: 东北石油大学, 2014. |
| ZHANG Xin. Dynamic stability analysis of intelligent walking excavator[D]. Daqing: Northeast Petroleum University, 2014. | |
| [5] | BABU A, DANTER L C, WILLENBROCK P, et al. ARTER: a Walking Excavator Robot for Autonomous and Remote Operations[J]. At - Automatisierungstechnik, 2022, 70(10): 876-887. |
| [6] | DONOSO F A, AUSTIN K J, McAREE P R. How Do ICP Variants Perform when Used for Scan Matching Terrain Point Clouds?[J]. Robotics and Autonomous Systems, 2017, 87: 147-161. |
| [7] | SOROKIN A. Post-repair Testing of the Walking Excavators' Electrical Machines[J]. Earth Sciences and Subsoil Use, 2020, 43(1): 103-110. |
| [8] | PIZETTA I H B, SANTOS BRANDÃO A, SARCINELLI-FILHO M. Control and Obstacle Avoidance for an UAV Carrying a Load in Forestal Environments[C]∥2018 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2018: 62-67. |
| [9] | PEVZNER L D, KISELEV N A. Automatic Control System for Walking Dragline Excavator Digging[J]. Mining Science and Technology (Russia), 2022, 7(1): 57-65. |
| [10] | GOLBASI O, SAHINER S F. Simulation-based Optimization of Workforce Configuration for Multi-division Maintenance Departments[J]. Computers & Industrial Engineering, 2024, 188: 109880. |
| [11] | 陈晋市, 张淼淼, 毕秋实, 等. 面向自主作业的挖掘机多目标最优挖掘运动规划[J]. 机械工程学报, 2022, 58(7): 237-245. |
| CHEN Jinshi, ZHANG Miaomiao, BI Qiushi, et al. Multi-objective Optimal Excavator Movement Planning for Autonomous Operation[J]. Journal of Mechanical Engineering, 2022, 58(7): 237-245. | |
| [12] | DONOSO F A, AUSTIN K J, McAREE P R. Three New Iterative Closest Point Variant-methods that Improve Scan Matching for Surface Mining Terrain[J]. Robotics and Autonomous Systems, 2017, 95: 117-128. |
| [13] | PALMER A W, HILL A J, SCHEDING S J. Methods for Stochastic Collection and Replenishment (SCAR) Optimisation for Persistent Autonomy[J]. Robotics and Autonomous Systems, 2017, 87: 51-65. |
| [14] | 王福德, 寇智慧, 张云. 基于ADAMS的灾害救援机器人姿态规划与越障分析[J]. 建筑机械, 2014(11): 71-74. |
| WANG Fude, KOU Zhihui, ZHANG Yun. Attitude Planning and Obstacle Crossing Analysis of Disaster Rescue Robot Based on ADAMS[J]. Construction Machinery,2014(11): 71-74. | |
| [15] | GEHRING C, COROS S, HUTTER M, et al. Practice Makes Perfect: an Optimization-based Approach to Controlling Agile Motions for a Quadruped Robot[J]. IEEE Robotics & Automation Magazine, 2016, 23(1): 34-43.[LinkOut] |
| [16] | 王福德.一种新型六轮全地形移动步履式挖掘机的设计与研究[D].沈阳:沈阳理工大学,2012. |
| WANG Fude. Design and Research of a New Six-wheel All-terrain Mobile Walking Excavator[D]. Shenyang: Shenyang University of Technology, 2012. | |
| [17] | 刘鹏虎, 张勇, 张强. 液压挖掘机工作装置的动力学分析及控制[J]. 中国工程机械学报, 2007, 5(1): 72-74. |
| LIU Penghu, ZHANG Yong, ZHANG Qiang. Dynamical Analysis and Control for Manipulator of Hydraulic Excavator[J]. Chinese Journal of Construction Machinery, 2007, 5(1): 72-74. | |
| [18] | RAIBERT M, BLANKESPOOR K, NELSON G, et al. BigDog, the Rough-terrain Quadruped Robot[J]. IFAC Proceedings Volumes, 2008, 41(2): 10822-10825. |
| [19] | HUTTER M, GEHRING C, HÖPFLINGER M A, et al. Toward Combining Speed, Efficiency, Versatility, and Robustness in an Autonomous Quadruped[J]. IEEE Transactions on Robotics, 2014, 30(6): 1427-1440. |
| [20] | HUTTER M, LEEMANN P, STEVSIC S, et al. Towards Optimal Force Distribution for Walking Excavators[C]∥2015 International Conference on Advanced Robotics (ICAR). Istanbul, 2015: 295-301. |
| [21] | HUTTER M, LEEMANN P, HOTTIGER G, et al. Force Control for Active Chassis Balancing[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 613-622. |
| [22] | ZHANG Tianci, FU Tao, SONG Xueguan, et al. Multi-objective Excavation Trajectory Optimization for Unmanned Electric Shovels Based on Pseudospectral Method[J]. Automation in Construction, 2022, 136: 104176. |
| [23] | FU Tao, ZHANG Tianci, Yilin LYU, et al. Digital Twin-based Excavation Trajectory Generation of Uncrewed Excavators for Autonomous Mining[J]. Automation in Construction, 2023, 151: 104855. |
| [24] | ZHANG Tianci, FU Tao, NI Tao, et al. Data-driven Excavation Trajectory Planning for Unmanned Mining Excavator[J]. Automation in Construction, 2024, 162: 105395. |
| [25] | BJELONIC M, SANKAR P K, BELLICOSO C D, et al. Rolling in the Deep – Hybrid Locomotion for Wheeled-legged Robots Using Online Trajectory Optimization[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3626-3633. |
| [26] | SUN Jingyuan, YOU Yangwei, ZHAO Xuran, et al. Towards More Possibilities: Motion Planning and Control for Hybrid Locomotion of Wheeled-legged Robots[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3723-3730. |
| [27] | JELAVIC E, HUTTER M. Whole-body Motion Planning for Walking Excavators[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau, 2019: 2292-2299. |
| [28] | JELAVIC E, BERDOU Y, JUD D, et al. Terrain-adaptive Planning and Control of Complex Motions for Walking Excavators[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, 2020: 2684-2691. |
| [29] | JELAVIC E, FARSHIDIAN F, HUTTER M. Combined Sampling and Optimization Based Planning for Legged-wheeled Robots[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, 2021: 8366-8372.[LinkOut] |
| [30] | ASPRAGATHOS N A, DIMITROS J K. A Comparative Study of Three Methods for Robot Kinematics[J]. IEEE Transactions on Systems, Man, and Cybernetics Part B, Cybernetics, 1998, 28(2): 135-145.[PubMed] |
| [1] |
LI Meng-Lei, GU Yo-Qin, ZHANG Hua-Liang, LIU Li-Qin, DU Juan, WEN Chu-Hua, LAN Guo-Sheng.
Parallel Mechanism Structure Optimization Design Based on Multi-objective Differential Evolution Algorithm
[J]. J4, 201016, 21(16): 1915-1920.
|
| [2] | GENG Yuhang, HE Xueming, GAO Zong. Adaptive Design Method of Efficient Twin Screw Rotors Based on NURBS Mesh Lines [J]. China Mechanical Engineering, 2025, 36(12): 2837-2845. |
| [3] | DANG Xu, LIU Tao, YAN Min, XU Zhiwei. Multi-objective Optimization of Precision Milling Parameters for Variable Cross-section Scrolls [J]. China Mechanical Engineering, 2025, 36(12): 2854-2861. |
| [4] | Jianlin LIU, Haisong HUANG, Qingsong FAN, Chi MA, Langlang ZHANG. Multi-objective Trajectory Planning of Manipulators Based on Improved SSA [J]. China Mechanical Engineering, 2025, 36(09): 2047-2056. |
| [5] | LIN Shuwen, LU Zhe, WEI Shijia, CHEN Jianxiong, GU Tianqi, XIE Yu. Simulation of Dynamic Characteristics of Excavator Working Processes and Multi-objective Optimization Design Method of Main Component Parameters [J]. China Mechanical Engineering, 2025, 36(06): 1371-1379. |
| [6] | RAO Yuan1, SUN Jianjun1, WEN Lan2. Research on Liquid Film Vaporization and Structural Optimization of End Faces for Diffuser Self-pumping Mechanical Seals [J]. China Mechanical Engineering, 2025, 36(05): 933-941,953. |
| [7] | ZHANG Daode, LU Zijian, ZHAO Kun, YANG Zhiyong. Research on Multi-objective Path Planning Method for Tracked Robots under Non-flat Environments [J]. China Mechanical Engineering, 2025, 36(02): 305-314. |
| [8] | LIU Guiyuan1, WANG Zeng2, YANG Ziyi2, HU Mingzhu1, LIU Huaiju1. Development and Applications of Aero-engine Accessory Gearbox Gear Transmission Design and Analysis Softwares [J]. China Mechanical Engineering, 2024, 35(11): 1938-1947. |
| [9] | HU Fuqing, SUN Jianghong, SUN Yingjie, SUN Yutong, MA Chao, ZHOU Fuqiang, . Design and Parameter Optimization of Slicing Machines Based on New Rotary-straight Line Reciprocating Mechanisms [J]. China Mechanical Engineering, 2024, 35(04): 614-623,635. |
| [10] | WEI Shupeng, TANG Hongtao, LI Xixing, YANG Guanyu, ZHANG Jian. Dual-resource Constrained Flexible Machining Workshop Inverse Scheduling Problem [J]. China Mechanical Engineering, 2024, 35(03): 457-471. |
| [11] | LIU Yi, YI Wangmin, YAO Jiantao, WANG Xingda, YU Peng, ZHAO Yongshen. Design and Research of Heavy-duty Posture-adjusting Assembly Robots in Narrow Space [J]. China Mechanical Engineering, 2024, 35(02): 324-336. |
| [12] | QU Ligang, SU Yan, XIN Yufei. Automatic Layout Method of Aircraft Tank Pipelines Based on SHO-NSGA Hybrid Algorithm [J]. China Mechanical Engineering, 2023, 34(15): 1864-1872. |
| [13] | ZHANG Weicun, GU Hongyu. Job-shop Scheduling Problems Considering Similar Learning Effect in One-worker and Multiple-machine Partterns [J]. China Mechanical Engineering, 2023, 34(14): 1701-1709. |
| [14] | PENG Xiang, JIANG Haohao, GUO Yuliang, LI Jiquan, YI Bing, JIANG Shaofei, . Collaborative Optimization of Stacking Sequence and Material Distribution for Wing Skins [J]. China Mechanical Engineering, 2023, 34(12): 1415-1424,1435. |
| [15] | CHEN Xiren, YE Wenhua, ZHANG Chaohong, CUI Kunkun, LENG Sheng, YE Liukang. NURBS Curve-based Multi-objective Aerodynamic Optimization Design for Ultra-high-speed Elevator Fairings [J]. China Mechanical Engineering, 2023, 34(12): 1436-1445,1464. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||