

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (5): 1082-1094.DOI: 10.3969/j.issn.1004-132X.2026.05.008
Previous Articles Next Articles
JIN Yongping1,2( ), SHI Zimu1,2,3, WAN Buyan1,2, LIU Deshun1,2
), SHI Zimu1,2,3, WAN Buyan1,2, LIU Deshun1,2
Received:2025-06-27
Online:2026-05-25
Published:2026-06-09
Contact:
JIN Yongping
金永平1,2(), 石子木1,2,3, 万步炎1,2, 刘德顺1,2
通讯作者:
金永平
作者简介:金永平*(通信作者),男,1984年生,教授、博士研究生导师。研究方向为海洋矿产资源勘探开发、深海探测技术与装备研发、深海作业装备可靠性与智能运维。E-mail: jinyongping@hnust.edu.cn。
基金资助:CLC Number:
JIN Yongping, SHI Zimu, WAN Buyan, LIU Deshun. Development Status and Key Technologies in Subsea Pipeline Inspection ROVs[J]. China Mechanical Engineering, 2026, 37(5): 1082-1094.
金永平, 石子木, 万步炎, 刘德顺. 海底管道检测遥控水下机器人发展现状与关键技术[J]. 中国机械工程, 2026, 37(5): 1082-1094.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.05.008
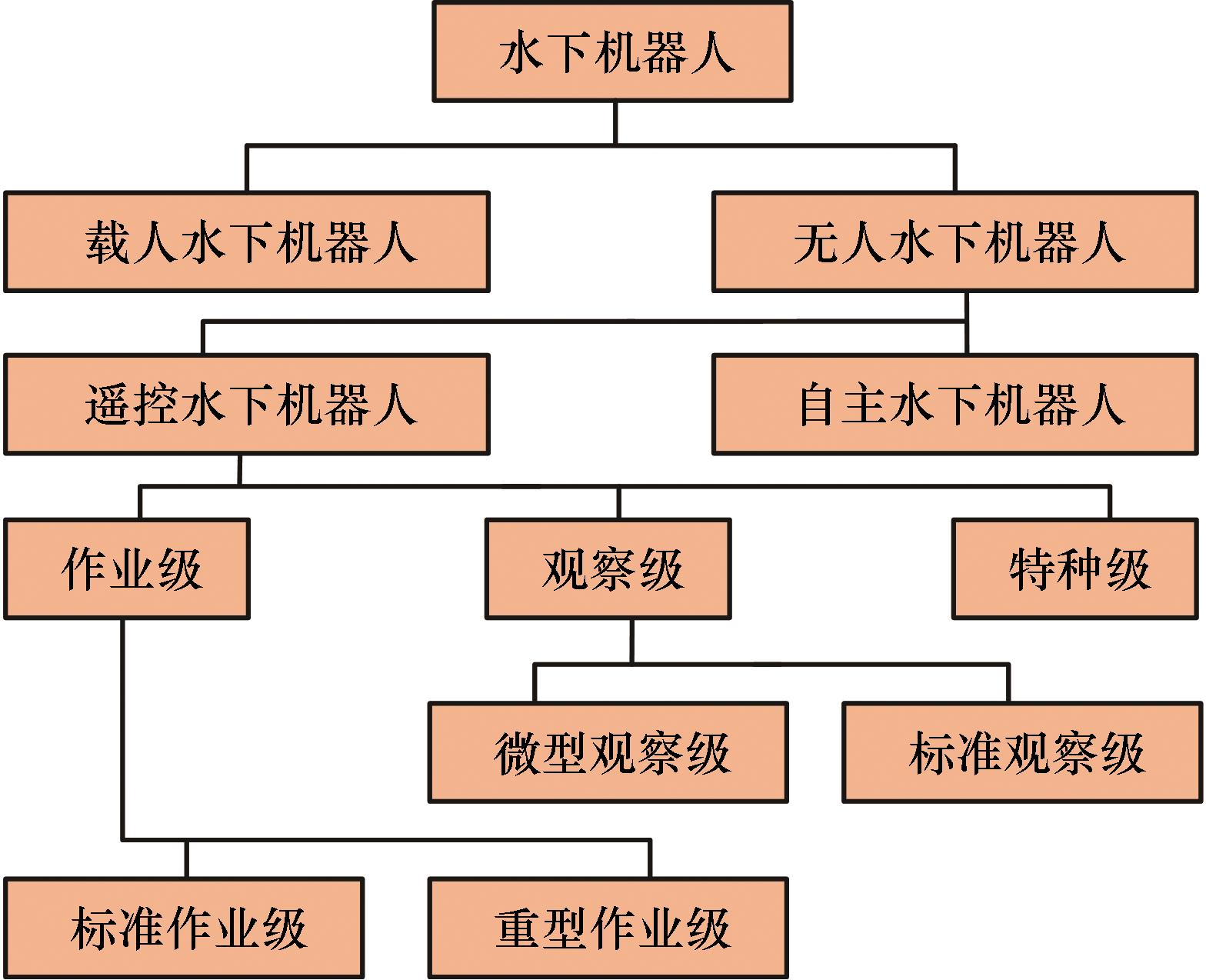
Fig.1 Classification of underwater robots
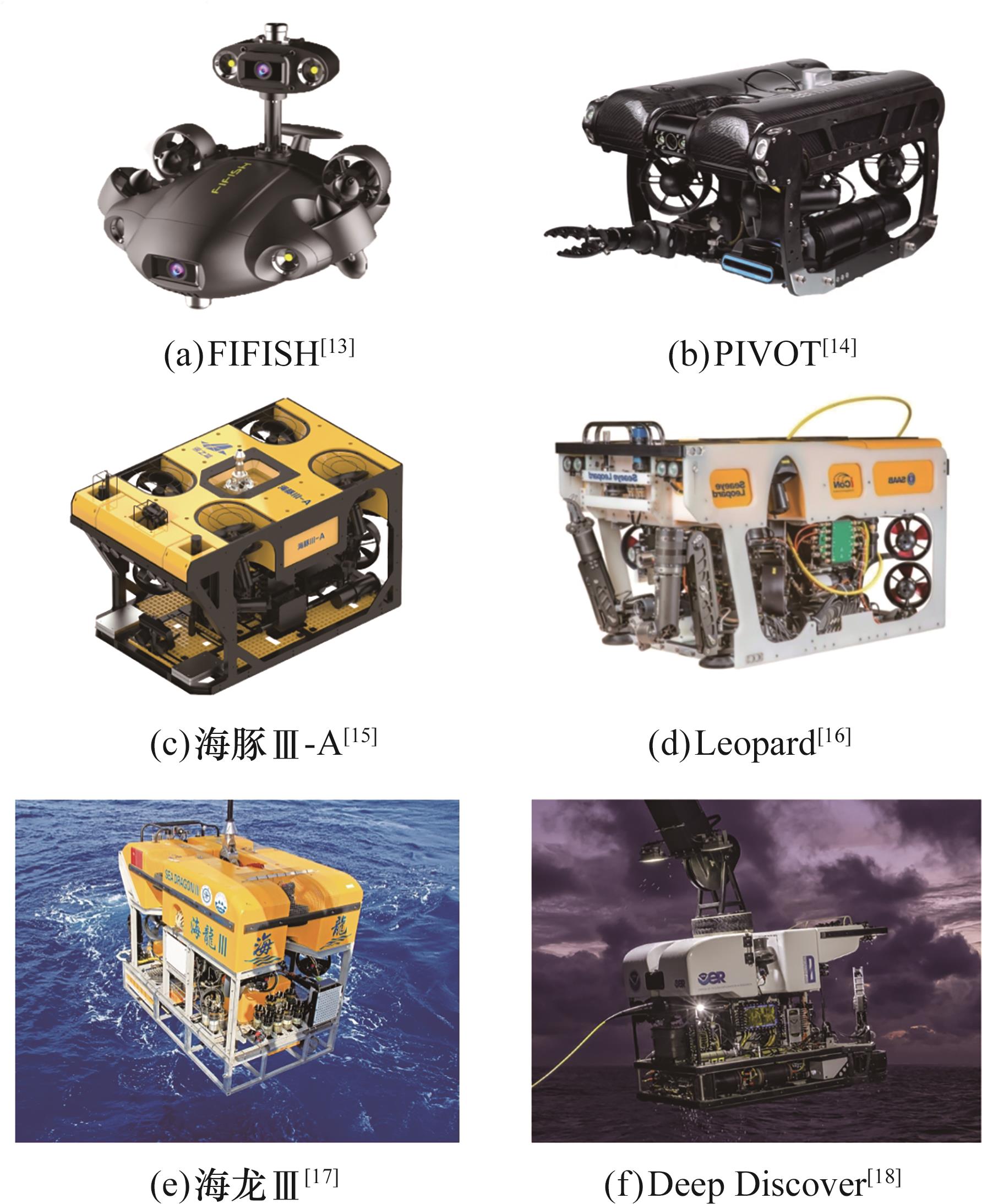
Fig.2 Various types of ROV
ROV 类型 | 质量/kg | 驱动方式 | 收放 方式 | 最大工作 深度/m | 任务形式 | 适用环境 | 优点 | 缺点 |
|---|---|---|---|---|---|---|---|---|
微型 观察级 | 3~20 | 电驱动 | 手动 | 100 | 水下影像采集、浅水区域巡检 | 浅水区域,近岸环境 | 体积小,灵活,适合浅水环境,快速部署 | 深度有限,负载较轻,适合简单任务 |
标准 观察级 | 30~120 | 电驱动 | 手动 | 300 | 水下影像采集、检测任务 | 近海区域,轻度污染环境 | 性能稳定,适合常规水下检测和观察任务 | 受限于较小载荷,深度较浅,适用于基础监测任务 |
标准 作业级 | 100~1500 | 电/液压驱动 | 收放 系统 | 3000 | 水下管道检查、设备安装与修复 | 中深水域,恶劣环境(如石油平台) | 较强的负载能力,适用于较难工作任务,有深度优势 | 成本较高,体积较大,操作复杂 |
重型 作业级 | <5000 | 电/液压驱动 | 收放 系统 | 6000 | 高难度作业、水下修复、大型工程 | 深海环境,复杂水下作业 | 强大负载能力,适合深海、大型设备的操作,稳定性高 | 成本高,操作复杂,难以在浅水区使用 |
| 特种级 | 根据任务 定制 | 电/液压驱动 | 收放 系统 | 根据任务 定制 | 深海钻探、核电站腔体清洗 | 极端、特殊水下环境 | 适应定向极端环境,扩展能力强 | 成本高,操作复杂,适用性低 |
Tab.1 Characteristics of different types of ROV
ROV 类型 | 质量/kg | 驱动方式 | 收放 方式 | 最大工作 深度/m | 任务形式 | 适用环境 | 优点 | 缺点 |
|---|---|---|---|---|---|---|---|---|
微型 观察级 | 3~20 | 电驱动 | 手动 | 100 | 水下影像采集、浅水区域巡检 | 浅水区域,近岸环境 | 体积小,灵活,适合浅水环境,快速部署 | 深度有限,负载较轻,适合简单任务 |
标准 观察级 | 30~120 | 电驱动 | 手动 | 300 | 水下影像采集、检测任务 | 近海区域,轻度污染环境 | 性能稳定,适合常规水下检测和观察任务 | 受限于较小载荷,深度较浅,适用于基础监测任务 |
标准 作业级 | 100~1500 | 电/液压驱动 | 收放 系统 | 3000 | 水下管道检查、设备安装与修复 | 中深水域,恶劣环境(如石油平台) | 较强的负载能力,适用于较难工作任务,有深度优势 | 成本较高,体积较大,操作复杂 |
重型 作业级 | <5000 | 电/液压驱动 | 收放 系统 | 6000 | 高难度作业、水下修复、大型工程 | 深海环境,复杂水下作业 | 强大负载能力,适合深海、大型设备的操作,稳定性高 | 成本高,操作复杂,难以在浅水区使用 |
| 特种级 | 根据任务 定制 | 电/液压驱动 | 收放 系统 | 根据任务 定制 | 深海钻探、核电站腔体清洗 | 极端、特殊水下环境 | 适应定向极端环境,扩展能力强 | 成本高,操作复杂,适用性低 |
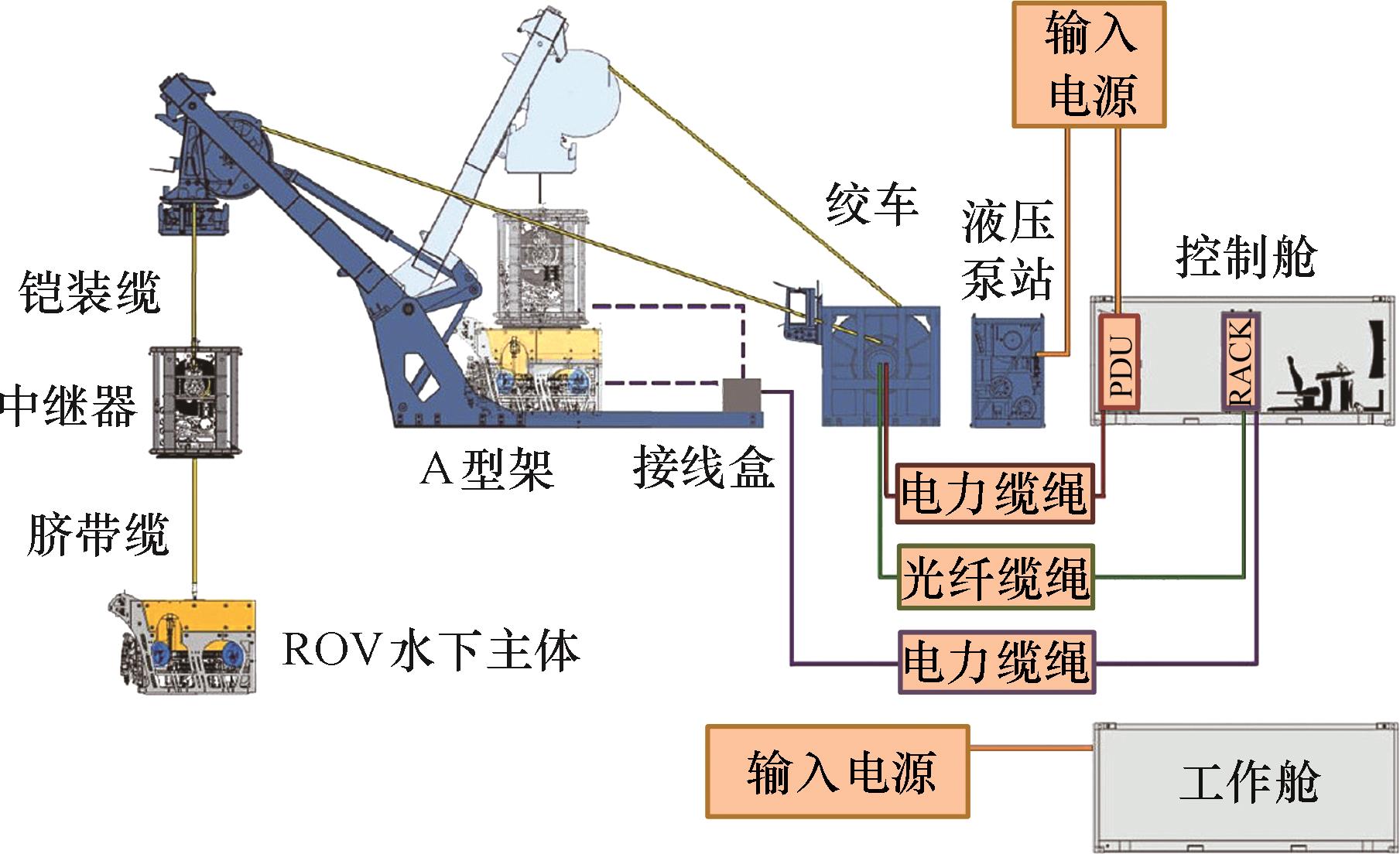
Fig.3 Schematic diagram of a work-class ROV system

Fig.4 Superior survey ROV
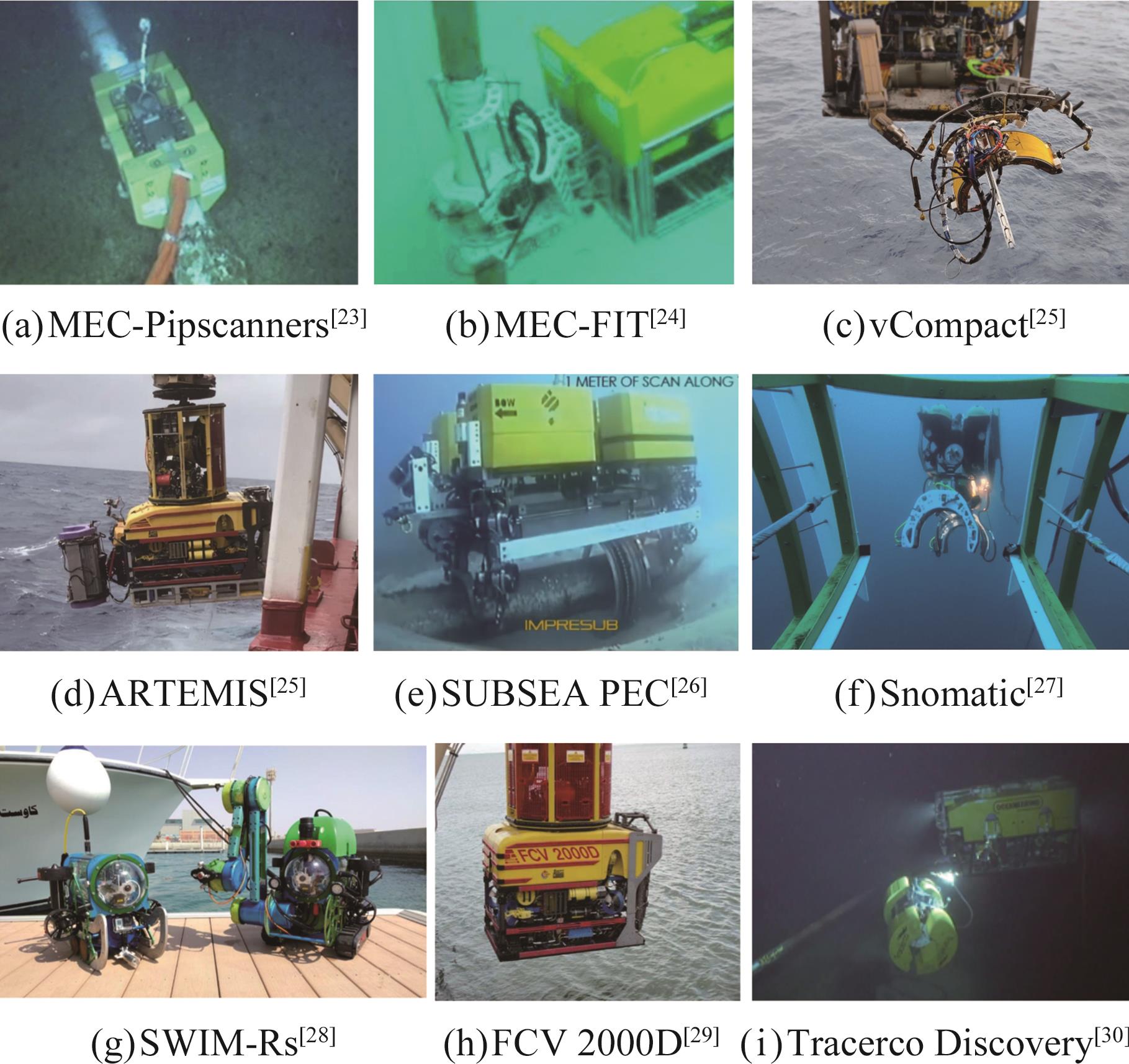
Fig.5 Subsea pipeline inspection ROV
| 名称 | 研发机构 | 检测内容 | 检测速度 v/(m·min | 可检壁厚 h/mm | 可穿透涂层 厚度/mm | 检测原理 |
|---|---|---|---|---|---|---|
| MEC-Pipescanners | 英国 Innospection | 局部外部和内部缺陷、 管壁腐蚀与损失 | <10 | h<30 | 15 | 电磁涡流检测技术 |
| vCompact | 英国 TSC Subsea | 管壁厚度、腐蚀损失 | <3.6 | 6<h<75 | 25 | 声学共振技术 |
| ARTEMIS | 英国 TSC Subsea | 腐蚀测绘图、管壁厚度、 管内介质检测 | 0.05 | 6<h<75 | 100 | 声学共振技术、脉冲涡流阵列技术 |
| Discovery | 英国Tracerco | 诊断流动异常、管壁详细图像信息 | <0.001 27 | 20 | 50 | 射线扫描检测 |
Tab.2 Technical parameters of abroad representative rov-based subsea pipeline inspection equipment
| 名称 | 研发机构 | 检测内容 | 检测速度 v/(m·min | 可检壁厚 h/mm | 可穿透涂层 厚度/mm | 检测原理 |
|---|---|---|---|---|---|---|
| MEC-Pipescanners | 英国 Innospection | 局部外部和内部缺陷、 管壁腐蚀与损失 | <10 | h<30 | 15 | 电磁涡流检测技术 |
| vCompact | 英国 TSC Subsea | 管壁厚度、腐蚀损失 | <3.6 | 6<h<75 | 25 | 声学共振技术 |
| ARTEMIS | 英国 TSC Subsea | 腐蚀测绘图、管壁厚度、 管内介质检测 | 0.05 | 6<h<75 | 100 | 声学共振技术、脉冲涡流阵列技术 |
| Discovery | 英国Tracerco | 诊断流动异常、管壁详细图像信息 | <0.001 27 | 20 | 50 | 射线扫描检测 |
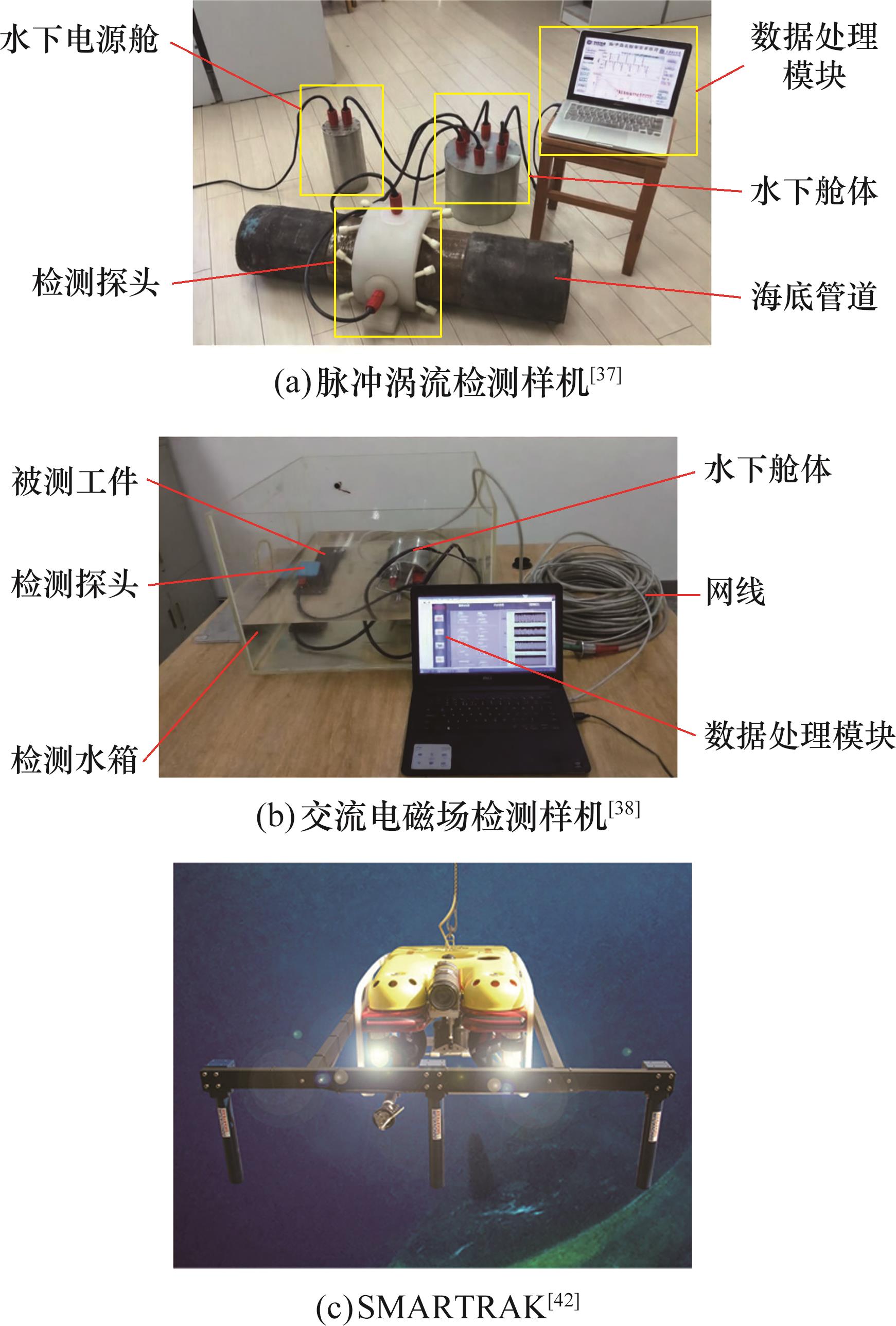
Fig.6 Subsea pipeline inspection equipment
| 名称 | 研发 机构 | 检测 内容 | 检测速度 v/(m·min | 可检 壁厚 h/mm | 可穿 透涂 层厚度 b/mm | 检测 原理 |
|---|---|---|---|---|---|---|
| FIFISH PRO W6 | 鳍源 科技 | 外部 缺陷 | v<90 | 0 | 0 | 视觉 检测技术 |
便携式 智能管道检测仪器 | 中国 石油 大学 | 管道 裂纹 | 0.3 | h<3 | b<6 | 交流 电磁场 检测技术 |
水下管道的脉冲 涡流检测 样机 | 大连 理工 大学 | 腐蚀 缺陷 | 7.6< h<17.9 | 120 | 脉冲涡流检测技术 | |
| 海底管道声呐成像巡检技术 | 浙江 大学 | 管道 位姿 | 6 | 0 | 0 | 声学检测 |
Tab.3 Technical parameters of domestic representative ROV-based subsea pipeline detection equipment
| 名称 | 研发 机构 | 检测 内容 | 检测速度 v/(m·min | 可检 壁厚 h/mm | 可穿 透涂 层厚度 b/mm | 检测 原理 |
|---|---|---|---|---|---|---|
| FIFISH PRO W6 | 鳍源 科技 | 外部 缺陷 | v<90 | 0 | 0 | 视觉 检测技术 |
便携式 智能管道检测仪器 | 中国 石油 大学 | 管道 裂纹 | 0.3 | h<3 | b<6 | 交流 电磁场 检测技术 |
水下管道的脉冲 涡流检测 样机 | 大连 理工 大学 | 腐蚀 缺陷 | 7.6< h<17.9 | 120 | 脉冲涡流检测技术 | |
| 海底管道声呐成像巡检技术 | 浙江 大学 | 管道 位姿 | 6 | 0 | 0 | 声学检测 |
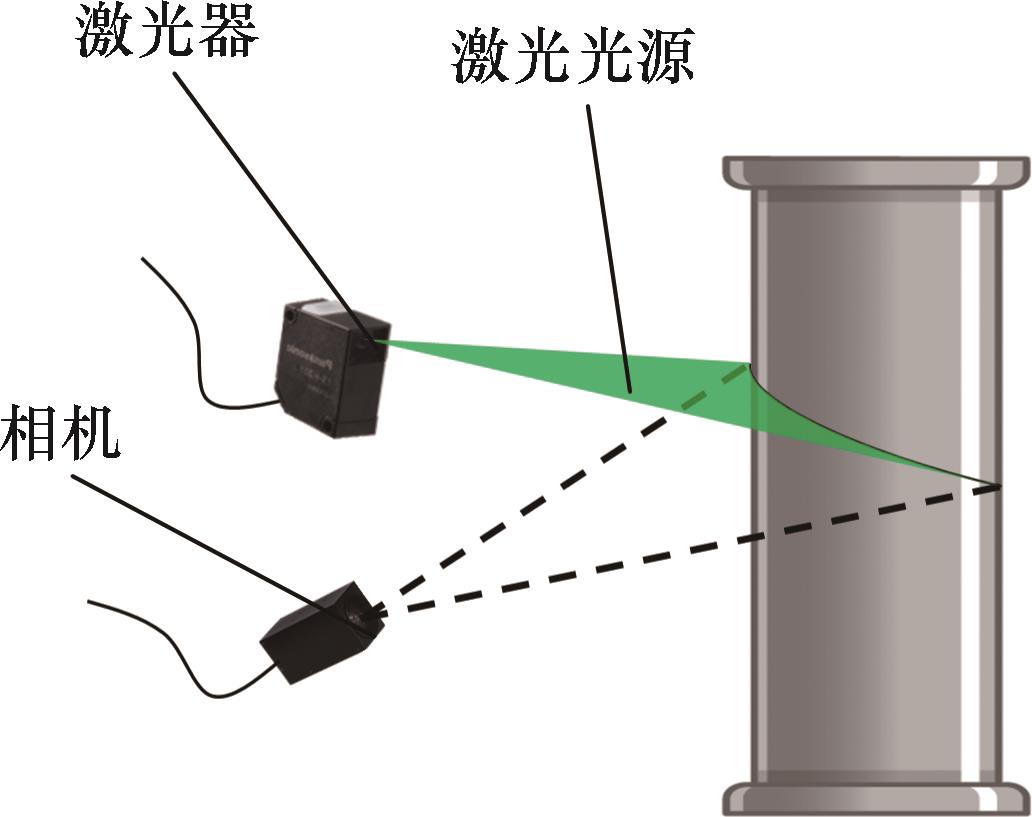
Fig.7 Principle diagram of laser scanning detection
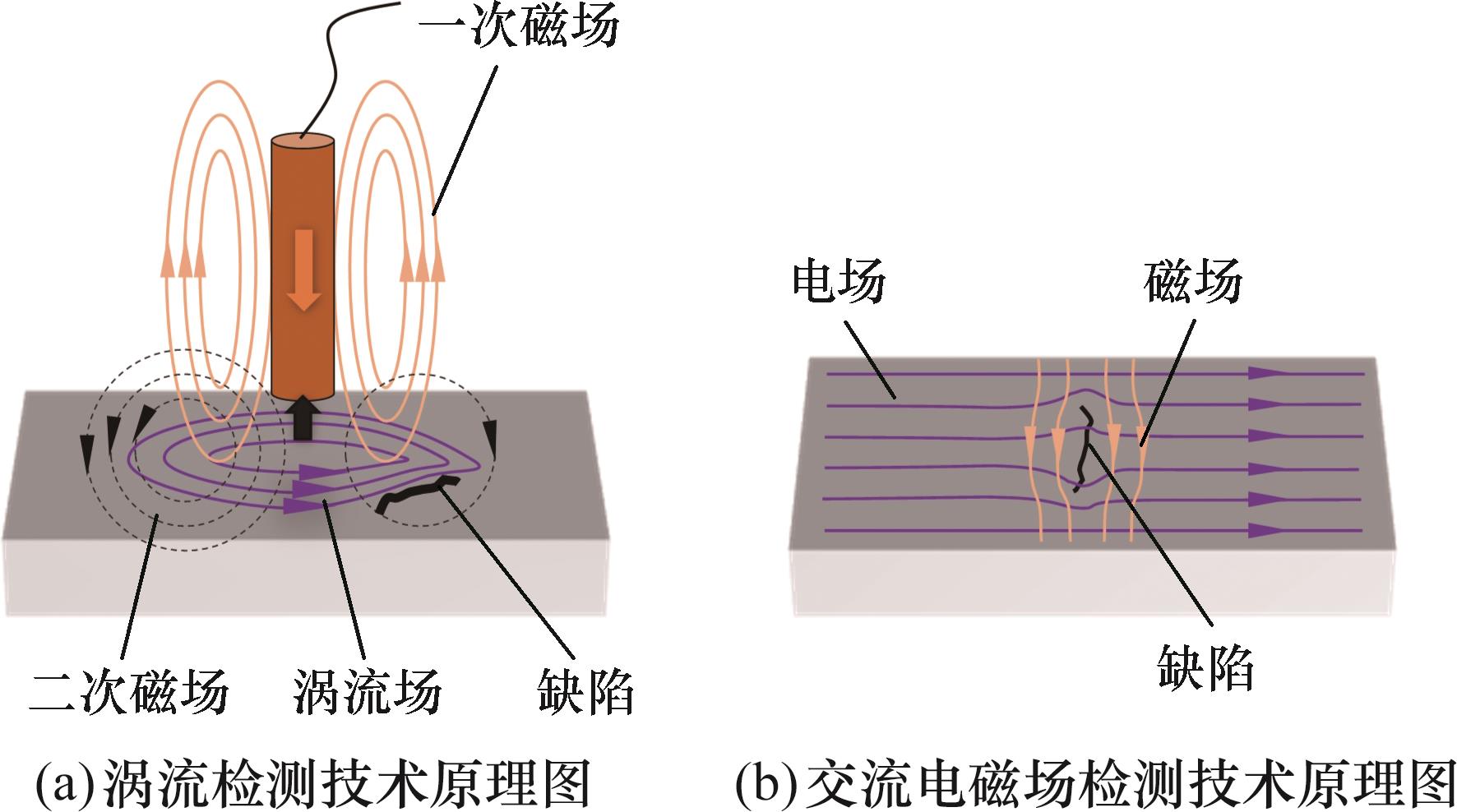
Fig.8 Principle diagram of electromagnetic detection
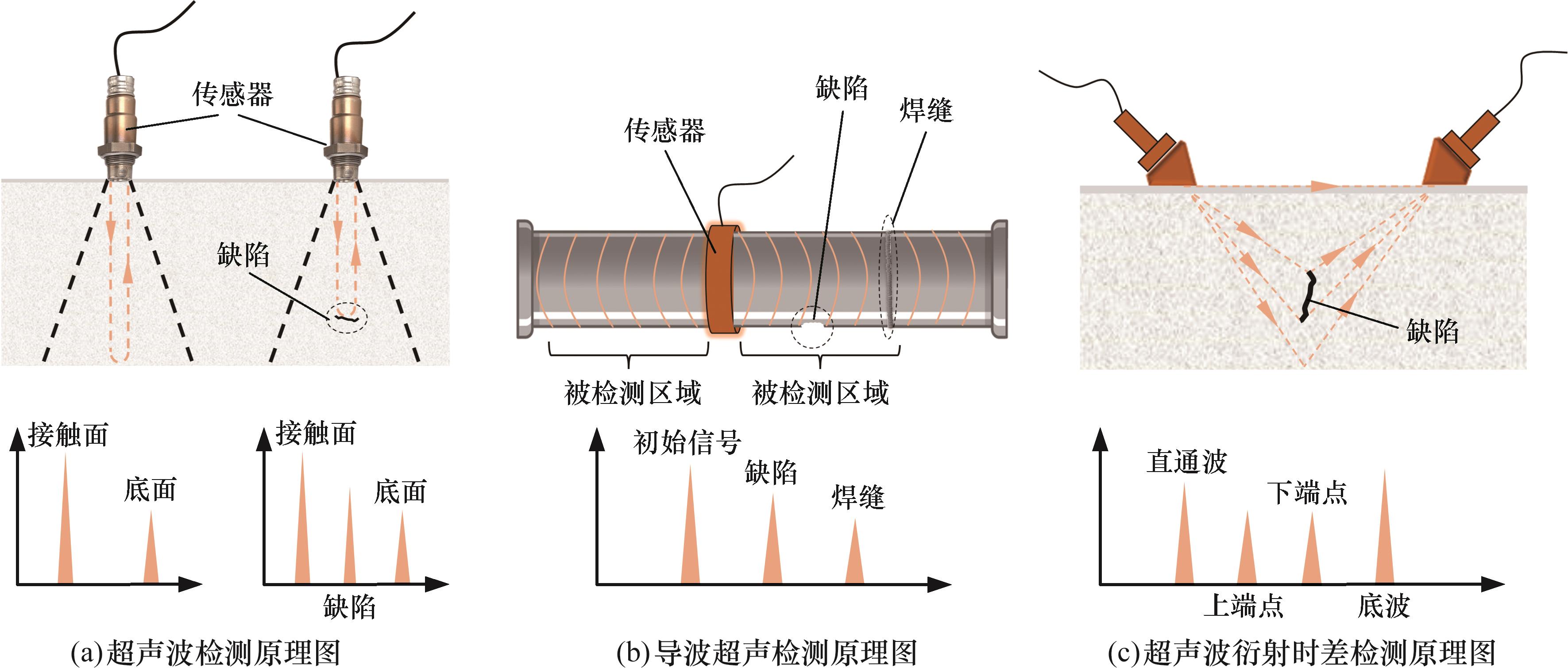
Fig.9 Principle diagram of sound wave detection
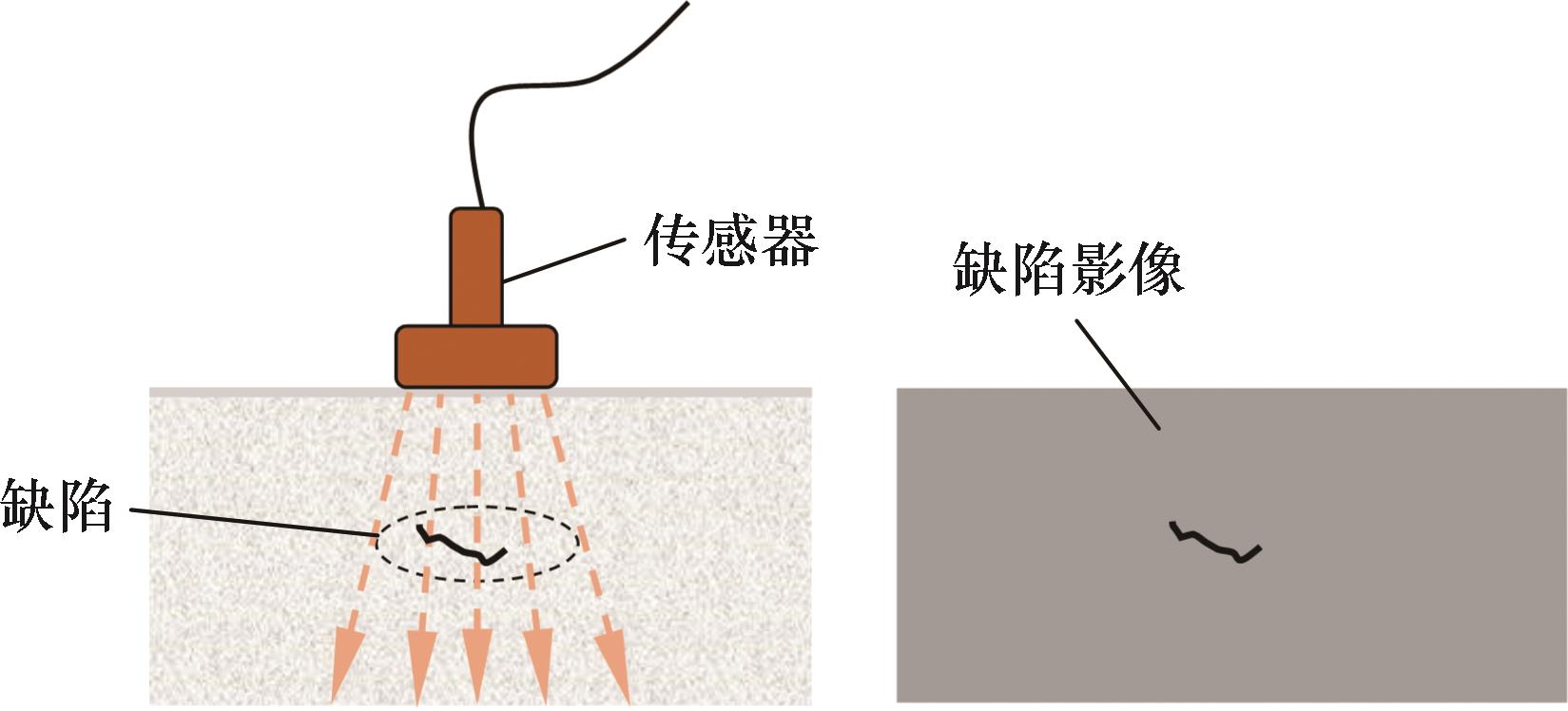
Fig.10 Principle diagram of radiographic detection
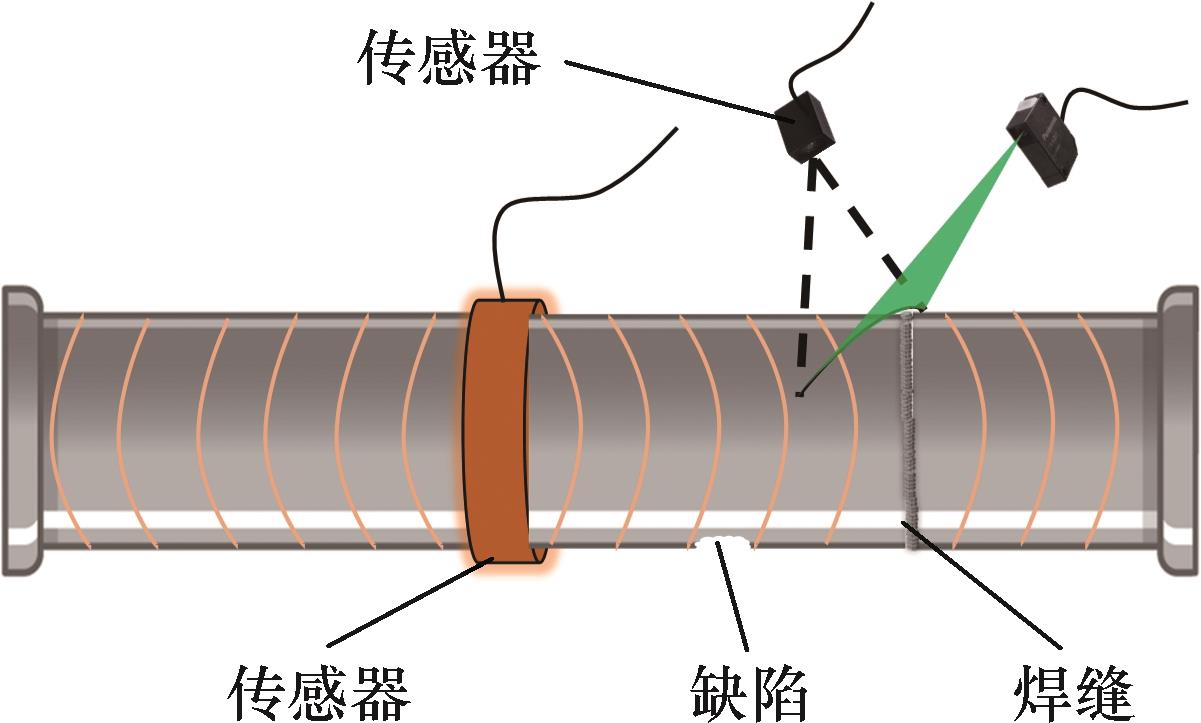
Fig.11 Diagram of composite detection
| 检测原理 | 检测技术 | 优点 | 缺点 | 适用场景 | 清洁度要求 |
|---|---|---|---|---|---|
| 声学检测 | 超声波检测技术 | 高精度、适用多种材料、 穿透性强 | 需耦合剂、操作技术要求高、检测面积小 | 壁厚、腐蚀、焊缝质量检测 | 需去除较厚涂层、 表面应清洁 |
| 导波超声波检测技术 | 非破坏性大范围检测、 检测分辨率高 | 受环境影响大、对材料 要求高 | 长距离检测、大范围扫描 | 可不去除涂层、 表面应清洁 | |
| 超声波衍射时差法 | 缺陷高精度定位检测 | 适用于平直表面检测、 曲面检测困难 | 焊缝、裂纹定位 | 需去除较厚涂层、 表面应清洁 | |
声呐检测 技术 | 无需接触管道 | 分辨率低、受环境条件 影响大 | 运行中管道监测、 早期故障预警 | 可不去除涂层、表面 清洁度影响小 | |
| 电磁、声学检测 | 电磁超声检测技术 | 无需耦合剂、非接触性 检测、耐高温 | 存在近表面盲区、信噪比差、转换效率低 | 在线检测、管道的腐蚀、 裂纹等的检测 | 可不去除涂层、 表面应清洁 |
| 电磁检测 | 传统涡流 检测技术 | 非接触性检测、对微小裂纹腐蚀敏感、探头结构简单 | 检测深度较浅、 存在趋肤效应 | 金属管道表面裂纹 腐蚀检测 | 需去除较厚涂层、 表面应清洁 |
脉冲涡流 检测技术 | 非接触性检测、穿透性强、具备多层结构和厚壁检测能力 | 信号解析复杂、环境电磁噪声影响大 | 带涂层、多层以及厚壁 结构检测 | 可不去除涂层、 表面应清洁 | |
| 交流电磁场检测技术 | 非接触性检测、快速检测、可覆盖大面积 | 受管道表面平整度的影响、需精确校准 | 表面裂纹和浅层腐蚀检测 | 需去除较厚涂层、 表面应清洁 | |
水下磁粉 探伤技术 | 检测结果直观、 缺点定位精准 | 仅能检测表面缺陷、 受水流和温度影响 | 水下管道表面裂纹、 裂缝检测 | 需去除较厚涂层、 表面应清洁 | |
| 光学成像 | 可见光/红外光成像 | 高清图像显示、 能检测明显裂纹 | 仅能检测表面缺陷、 受环境影响大 | 表面明显裂纹、腐蚀检测 | 无需去除涂层、 表面应清洁 |
| 射线检测 | X射线/γ射线 | 内部缺陷检测、全深度扫描 | 安全要求高、设备质量大、检测时间长 | 深层缺陷检测、 复杂结构检测 | 无需去除涂层、 表面应清洁 |
| 阴极保护电位 | 电位检测 | 直接评估防护效果、 在线持续检测 | 无法定位单个缺陷点、 需要定期维护 | 腐蚀防护系统监测、 长期管道监测 | 无需去除涂层、 表面应清洁 |
| 复合检测技术 | 各类检测 技术 | 全面性、高可靠性 | 高成本、系统复杂性 | 据检测技术而定 | 据检测技术而定 |
Tab.4 Technical characteristics of ROV-based subsea pipeline inspection
| 检测原理 | 检测技术 | 优点 | 缺点 | 适用场景 | 清洁度要求 |
|---|---|---|---|---|---|
| 声学检测 | 超声波检测技术 | 高精度、适用多种材料、 穿透性强 | 需耦合剂、操作技术要求高、检测面积小 | 壁厚、腐蚀、焊缝质量检测 | 需去除较厚涂层、 表面应清洁 |
| 导波超声波检测技术 | 非破坏性大范围检测、 检测分辨率高 | 受环境影响大、对材料 要求高 | 长距离检测、大范围扫描 | 可不去除涂层、 表面应清洁 | |
| 超声波衍射时差法 | 缺陷高精度定位检测 | 适用于平直表面检测、 曲面检测困难 | 焊缝、裂纹定位 | 需去除较厚涂层、 表面应清洁 | |
声呐检测 技术 | 无需接触管道 | 分辨率低、受环境条件 影响大 | 运行中管道监测、 早期故障预警 | 可不去除涂层、表面 清洁度影响小 | |
| 电磁、声学检测 | 电磁超声检测技术 | 无需耦合剂、非接触性 检测、耐高温 | 存在近表面盲区、信噪比差、转换效率低 | 在线检测、管道的腐蚀、 裂纹等的检测 | 可不去除涂层、 表面应清洁 |
| 电磁检测 | 传统涡流 检测技术 | 非接触性检测、对微小裂纹腐蚀敏感、探头结构简单 | 检测深度较浅、 存在趋肤效应 | 金属管道表面裂纹 腐蚀检测 | 需去除较厚涂层、 表面应清洁 |
脉冲涡流 检测技术 | 非接触性检测、穿透性强、具备多层结构和厚壁检测能力 | 信号解析复杂、环境电磁噪声影响大 | 带涂层、多层以及厚壁 结构检测 | 可不去除涂层、 表面应清洁 | |
| 交流电磁场检测技术 | 非接触性检测、快速检测、可覆盖大面积 | 受管道表面平整度的影响、需精确校准 | 表面裂纹和浅层腐蚀检测 | 需去除较厚涂层、 表面应清洁 | |
水下磁粉 探伤技术 | 检测结果直观、 缺点定位精准 | 仅能检测表面缺陷、 受水流和温度影响 | 水下管道表面裂纹、 裂缝检测 | 需去除较厚涂层、 表面应清洁 | |
| 光学成像 | 可见光/红外光成像 | 高清图像显示、 能检测明显裂纹 | 仅能检测表面缺陷、 受环境影响大 | 表面明显裂纹、腐蚀检测 | 无需去除涂层、 表面应清洁 |
| 射线检测 | X射线/γ射线 | 内部缺陷检测、全深度扫描 | 安全要求高、设备质量大、检测时间长 | 深层缺陷检测、 复杂结构检测 | 无需去除涂层、 表面应清洁 |
| 阴极保护电位 | 电位检测 | 直接评估防护效果、 在线持续检测 | 无法定位单个缺陷点、 需要定期维护 | 腐蚀防护系统监测、 长期管道监测 | 无需去除涂层、 表面应清洁 |
| 复合检测技术 | 各类检测 技术 | 全面性、高可靠性 | 高成本、系统复杂性 | 据检测技术而定 | 据检测技术而定 |
| [1] | 王金龙, 何仁洋, 张海彬, 等. 海底管道检测最新技术及发展方向[J]. 石油机械, 2016, 44(10): 112-118. |
| WANG Jinlong, HE Renyang, ZHANG Haibin, et al. State-of-the-art Advancement and Development Direction of Submarine Pipeline Inspection Technology[J]. China Petroleum Machinery, 2016, 44(10): 112-118. | |
| [2] | 董绍华, 段宇航, 孙伟栋, 等. 中国海底管道完整性评价技术发展现状及展望[J]. 油气储运, 2020, 39(12): 1331-1336. |
| DONG Shaohua, DUAN Yuhang, SUN Weidong, et al. Current Situation and Prospect of Submarine Pipeline Integrity Evaluation in China[J]. Oil & Gas Storage and Transportation, 2020, 39(12): 1331-1336. | |
| [3] | 陈海龙, 孙政策, 凌爱军, 等. 我国在役海底管道发证现状研究[J]. 石油工程建设, 2020, 46(): 273-277. |
| CHEN Hailong, SUN Zhengce, LING Aijun, et al. Current Status of Certifications for In-service Submarine Pipelines in China[J]. Petroleum Engineering Construction, 2020, 46(S1): 273-277. | |
| [4] | KANG D H, KIM S, LEE C, et al. Corrosion Fatigue Behaviors of HSB800 and Its HAZs in Air and Seawater Environments[J]. Materials Science and Engineering: A, 2013, 559: 751-758. |
| [5] | 王红红, 刘国恒. 中国海油海底管道事故统计及分析[J]. 中国海上油气, 2017, 29(5): 157-160. |
| WANG Honghong, LIU Guoheng. Statistics and Analysis of Subsea Pipeline Accidents of CNOOC[J]. China Offshore Oil and Gas, 2017, 29(5): 157-160. | |
| [6] | 张彪. 悬空管道治理关键参数设计及其应用[D]. 东营: 中国石油大学(华东), 2017. |
| ZHANG Biao. Key Parameters of Design and Its Application in Suspended Pipeline Control[D]. Dongying: China University of Petroleum (Huadong), 2017. | |
| [7] | 代博宇. 海底管道检测ROV控制系统研究[D]. 大连: 大连理工大学, 2022. |
| DAI Boyu. The Study on Control System of ROV Used in Subsea Pipeline Inspection[D]. Dalian: Dalian University of Technology, 2022. | |
| [8] | LEDEZMA F D, AMER A, ABDELLATIF F, et al. A Market Survey of Offshore Underwater Robotic Inspection Technologies for the Oil and Gas Industry[C]∥SPE Saudi Arabia Section Annual Technical Symposium and Exhibition. Al-Khobar, 2015: SPE 177989-MS. |
| [9] | CHIN C S. Systematic Modeling and Model-based Simulation of a Remotely Operated Vehicle Using MATLAB and Simulink[J]. International Journal of Modeling, Simulation, and Scientific Computing, 2011, 2(4): 481-511. |
| [10] | 马梦瑶. 基于ROV的水下管道声呐成像巡检关键技术研究[D]. 杭州: 浙江大学, 2023. |
| MA Mengyao. Research on Key Technology of Underwater Pipeline Sonar Imaging Inspection Based on ROV[D]. Hangzhou: Zhejiang University, 2023. | |
| [11] | DALHATU A, AZEVEDO R, UDEBHULU O, et al. Recent Developments of Remotely Operated Vehicle in the Oil and Gas Industry[J]. Holos, 2021, 3: 1-18. |
| [12] | CHRIST R D, WERNLI R L S. The ROV Manual: a User Guide for Remotely Operated Vehicles[M].Oxford:Butterworth-Heinemann, 2013. |
| [13] | QYSEA. FIFISH V6 Underwater Drone[EB/OL]. [2025-04-15]. . |
| [14] | DEEP TREKKER. Underwater ROV[EB/OL]. [2025-04-11].. |
| [15] | DEEPINFAR. Haitun Series ROVs[EB/OL]. [2025-04-13]. . |
| [16] | SAAB. Leopard[EB/OL].[2025-04-15]. . |
| [17] | 任峰, 张莹, 张丽婷, 等. “海龙Ⅲ”号ROV系统深海试验与应用研究[J]. 海洋技术学报, 2019, 38(2): 30-35. |
| REN Feng, ZHANG Ying, ZHANG Liting, et al. Research on the Deep-sea Test and Application of the “Hailong Ⅲ” ROV System[J]. Journal of Ocean Techno-logy, 2019, 38(2): 30-35. | |
| [18] | NOAA. Remotely Operated Vehicle Deep Discoverer[EB/OL]. [2025-04-15]. . |
| [19] | DIAKONT. Nuclear Solutions: Remote Robotic Cavity Cleaning & Decontamination Service[EB/OL]. [2025-04-13]. . |
| [20] | 张奇峰. 遥控水下机器人及作业技术[M]. 北京: 科学出版社, 2020. |
| ZHANG Qifeng. Remotely Operated Vehicle and Operation Technology[M]. Beijing: Science Press, 2020. | |
| [21] | 梁浩, 李海川, 郝兴国, 等. 海底管道失效原因及基于ROV的海底管道巡检技术[J]. 油气储运, 2015, 34(4): 439-441. |
| LIANG Hao, LI Haichuan, HAO Xingguo, et al. Reasons for Subsea Pipeline Failure and ROV-based Inspection Technology of Subsea Pipeline[J]. Oil & Gas Storage and Transportation, 2015, 34(4): 439-441. | |
| [22] | DEEPOCEAN. Superior Survey ROV[EB/OL]. [2025-04-13].. |
| [23] | INNOSPECTION. Subsea Pipelines[EB/OL]. [2025-04-13]. . |
| [24] | SONOMATIC. About Subsea Inspection[EB/OL]. [2025-04-11]. . |
| [25] | SUBSEATSC. Subsea Pipeline Inspection[EB/OL]. [2025-04-11].. |
| [26] | SLOMP E, BERTELLI M, MILIJANOVIC D. SUBSEA PEC: the NDT Diverless Robotic System for the Pipeline Corrosion Inspection[C]∥Abu Dhabi International Petroleum Conference and Exhibition. Abu Dhabi, 2012: SPE 161662-MS. |
| [27] | SONOMATIC. Subsea Flowline Scanning Success Story[EB/OL]. [2025-04-11]. . |
| [28] | PATEL S, ABDELLATIF F, ALSHEIKH M, et al. Multi-robot System for Inspection of Underwater Pipelines in Shallow Waters[J]. International Journal of Intelligent Robotics and Applications, 2024, 8(1): 14-38. |
| [29] | FUGRO SUBSEA SERVICES. FCV 2000-Next Generation Work Class ROV[EB/OL]. [2025-04-15]. . |
| [30] | ROBINS L. Tracerco Discovery: the World's First Subsea Computed Tomography(CT) Scanner for Non-intrusive Pipeline Inspection[J]. The APPEA Journal, 2014, 54(2): 545. |
| [31] | JACQUES R C, de OLIVEIRA H T H, dos SANTOS R W F, et al. Design of an EMAT Guided Wave Collar for Coated Riser Inspection[J]. IEEE Sensors Journal, 2020, 20(24): 14662-14669. |
| [32] | GARCIA J, LEWIS R, SHAHSAVAR M, et al. Detection and Tracking of Underwater Pipes Using a Magnetic Camera[C]∥2024 IEEE 20th International Conference on Automation Science and Engineering(CASE). Bari:IEEE, 2024: 755-760. |
| [33] | GOETTEMS F, FERNANDES C, SCHNEIDER E, et al. Novel Electromagnetic-based NDT Inspection for Detecting Tensile Armor Wire Ruptures in Flexible Pipes[C]∥Offshore Technology Conference. Houston, 2025: OTC-35565-MS. |
| [34] | VVLAI. VY250 Heavy Work-class ROV[EB/OL]. [2025-04-11]. . |
| [35] | QYSEA. FIFISH PRO W6 Enterprise Industrial Grade ROV Platform[EB/OL]. [2025-04-15]. . |
| [36] | 王锦融, 张佳钰, 李畅, 等. 一种自主式小型浅水水下管道巡检机器人的研制与试验[J]. 机械设计, 2023, 40(11): 83-87. |
| WANG Jinrong, ZHANG Jiayu, LI Chang, et al. R & D and Experiment of Small-sized Autonomous Underwater Robot for Pipeline Inspection in Shallow Water[J]. Journal of Machine Design, 2023, 40(11): 83-87. | |
| [37] | 张亮. 基于脉冲涡流海底管道无损检测工程化开发[D]. 大连: 大连理工大学, 2017. |
| ZHANG Liang. Engineering Development of Nondestructive Testing of Submarine Pipeline Based on Pulsed Eddy Current[D]. Dalian: Dalian University of Technology, 2017. | |
| [38] | 马维平. 水下交流电磁场便携式智能检测仪器研发[D]. 东营: 中国石油大学(华东), 2018. |
| MA Weiping. Development of a Portable Intelligent Detection Instrument Based on Underwater ACFM[D]. Dong-ying: China University of Petroleum (Huadong), 2018. | |
| [39] | 曲天阳. 基于多传感器的脉冲涡流无损检测技术研究[D]. 大连: 大连理工大学, 2018. |
| QU Tianyang. Research of Pulsed Eddy Current Nondestructive Technology Based on Multi-sensors[D]. Dalian: Dalian University of Technology, 2018. | |
| [40] | 王宏安. 海底管道漏磁检测缺陷定量表征与轮廓重构方法研究[D]. 东营: 中国石油大学(华东), 2020. |
| WANG Hongan. Research on Defect Quantitative Characterization and Profile Reconstruction in Submarine Pipelines Based on Magnetic Flux Leakage Testing[D]. Dongying: China University of Petroleum (Huadong), 2020. | |
| [41] | 刘振川. 海底管道检测机器人自主巡线控制系统研究[D]. 青岛: 中国海洋大学, 2015. |
| LIU Zhenchuan. The Study on Auto Tracking Control System for Inspection Robot Used in the Submarine Pipeline[D]. Qingdao: Ocean University of China, 2015. | |
| [42] | SMARTRAK. Submarine Cable Tracking & Depth of Burial Survey System[EB/OL]. [2025-04-11]. . |
| [43] | 冯统帅. 面向水下无损检测的ROV平台及其视觉图像增强技术研究[D]. 杭州: 浙江大学, 2022. |
| FENG Tongshuai. Research on ROV Platform and Visual Image Enhancement Technology for Underwater Non-destructive Testing[D]. Hangzhou: Zhejiang University, 2022. | |
| [44] | FAN J, OU Y, LI X, et al. Structured Light Vision Based Pipeline Tracking and 3D Reconstruction Method for Underwater Vehicle[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(2): 3372-3383. |
| [45] | 常永旭, 徐鹏程, 万波, 等. 水下无损外检测技术研究进展[J]. 科技通报, 2024, 40(4): 1-5. |
| CHANG Yongxu, XU Pengcheng, WAN Bo, et al. Research Progress of Underwater Non-destructive External Inspection Technology[J]. Bulletin of Science and Technology, 2024, 40(4): 1-5. | |
| [46] | 林莉, 马志远, 李喜孟. 无损检测[M]. 2版. 北京: 机械工业出版社, 2024. |
| LIN Li, MA Zhiyuan, LI Ximeng. Nondestructive Testing[M]. 2nd ed. Beijing: China Machine Press, 2024. | |
| [47] | CHEMISKY B, MENNA F, NOCERINO E, et al. Underwater Survey for Oil and Gas Industry: a Review of Close Range Optical Methods[J]. Remote Sensing, 2021, 13(14): 2789. |
| [48] | 宋韵. 带保护层非铁磁性金属管道脉冲涡流检测模型与方法[D]. 武汉: 华中科技大学, 2023. |
| SONG Yun. Theoretical Model and Method of Non-ferromagnetic Metallic Pipes with Claddings Using Pulsed Eddy Current Testing[D]. Wuhan: Huazhong University of Science and Technology, 2023. | |
| [49] | 武新军, 张卿, 沈功田. 脉冲涡流无损检测技术综述[J]. 仪器仪表学报, 2016, 37(8): 1698-1712. |
| WU Xinjun, ZHANG Qing, SHEN Gongtian. Review on Advances in Pulsed Eddy Current Nondestructive Testing Technology[J]. Chinese Journal of Scientific Instrument, 2016, 37(8): 1698-1712. | |
| [50] | CHEN K, BRENNAN F P, DOVER W D. Thin-skin AC Field in Anisotropic Rectangular Bar and ACPD Stress Measurement[J]. NDT & E International, 2000, 33(5): 317-323. |
| [51] | DOVER W D. Review of Developments in ACPD and ACFM[J]. British Journal of NDT, 1991,33(3): 121-127. |
| [52] | KOHLI R, MITTAL K L. Developments in Surface Contamination and Cleaning[M]. Oxford: William Andrew Publishing,2010. |
| [53] | HO M, EL-BORGI S, PATIL D, et al. Inspection and Monitoring Systems Subsea Pipelines: a Review Paper[J]. Structural Health Monitoring, 2020, 19(2): 606-645. |
| [54] | JEPPESEN L, DAM J, OLSEN H O. Subsea Automated Ultrasonic Inspection[C]∥Middle East Nondestructive Testing Conference & Exhibition. Manama, 2005:1-7. |
| [55] | CAWLEY P. Practical Long Range Guided Wave Inspection-applications to Pipes and Rail[J]. Engineering Materials Science, 2003,61(1): 35187844. |
| [56] | KASETKASEM T, TIPSUWAN Y, TULSOOK S, et al. A Pipeline Extraction Algorithm for Forward-looking Sonar Images Using the Self-organizing Map[J]. IEEE Journal of Oceanic Engineering, 2021, 46(1): 206-220. |
| [57] | FARH H M H, AMINE BEN SEGHIER M EL, ZAYED T. A Comprehensive Review of Corrosion Protection and Control Techniques for Metallic Pipelines[J]. Engineering Failure Analysis, 2023, 143: 106885. |
| [58] | WASIM M, DJUKIC M B. External Corrosion of Oil and Gas Pipelines: a Review of Failure Mechanisms and Predictive Preventions[J]. Journal of Natural Gas Science and Engineering, 2022, 100: 104467. |
| [59] | QUEIROZ R S, SILVA J P B, NEVES E C DAS, et al. Development and Fusion of NDT Classifiers for Defect Detection on Underwater Structures[J]. NDT & E International, 2024, 144: 103098. |
| [60] | Ruilin LYU, MENG Tian, XIONG Lei, et al. EddyBot: a Multichannel FPGA-based Eddy Current Testing Mobile Robot[J]. Measurement, 2025, 242: 115867. |
| [61] | ZHANG Jiawei, HAN Fenglei, HAN Duanfeng, et al. Advanced Underwater Measurement System for ROVs: Integrating Sonar and Stereo Vision for Enhanced Subsea Infrastructure Maintenance[J]. Journal of Marine Science and Engineering, 2024, 12(2): 306. |
| [62] | MUNIR N, HUANG J Y, WONG C N, et al. Machine Learning Based Eddy Current Testing: a Review[J]. Results in Engineering, 2025, 25: 103724. |
| [63] | SHEKHAWAT D, BARUA J, BHATIA K. AI-driven Robotics for Pipeline Integrity: Autonomous Subsea Applications in the North Sea[C]∥SPE Offshore Europe Conference & Exhibition. Richardson: Society of Petroleum Engineers, 2025: SPE 226716-MS. |
| [64] | SHE S, CHEN Y, HE Y, et al. Optimal Design of Remote Field Eddy Current Testing Probe for Ferromagnetic Pipeline Inspection[J]. Measurement, 2021, 168: 108306. |
| [65] | JIAO D, GAO B, RU G, et al. Instrumentation of Cross Electromagnetic Eddy Current Sensing for Internal Pipeline Inspection[J]. IEEE Sensors Journal, 2024, 24(14): 22745-22757. |
| [1] |
XU Xiao-Long, XU Guo-Hua.
Vision-based Localization of OutLand1000 ROV
[J]. China Mechanical Engineering, 2010, 21(11): 1288-1292.
|
| [2] | YANG Wen-Lin, ZHANG Ai-Qun, ZHANG Du-Yang, WEI Su-Fen. Research on Active Heave Compensation Control of Remotely Operated Vehicle [J]. China Mechanical Engineering, 2009, 20(23): 2777-2781. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||