

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2025, Vol. 36 ›› Issue (8): 1691-1699.DOI: 10.3969/j.issn.1004-132X.2025.08.005
Previous Articles Next Articles
Zhiwei ZHOU1, Jian GAO1,2( ), Lanyu ZHANG1,2
), Lanyu ZHANG1,2
Received:2024-08-30
Online:2025-08-25
Published:2025-09-18
Contact:
Jian GAO
周志伟1, 高健1,2(), 张揽宇1,2
通讯作者:
高健
作者简介:周志伟,男,1987年生,博士研究生。研究方向为微电子装备制造、多轴运动平台控制。发表论文6篇。基金资助:CLC Number:
Zhiwei ZHOU, Jian GAO, Lanyu ZHANG. A Model-free Cross-coupling Control Method for Parallel Kinematic Mechanisms with Symmetric Structure[J]. China Mechanical Engineering, 2025, 36(8): 1691-1699.
周志伟, 高健, 张揽宇. 对称并联运动机构的无模型交叉耦合控制[J]. 中国机械工程, 2025, 36(8): 1691-1699.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2025.08.005
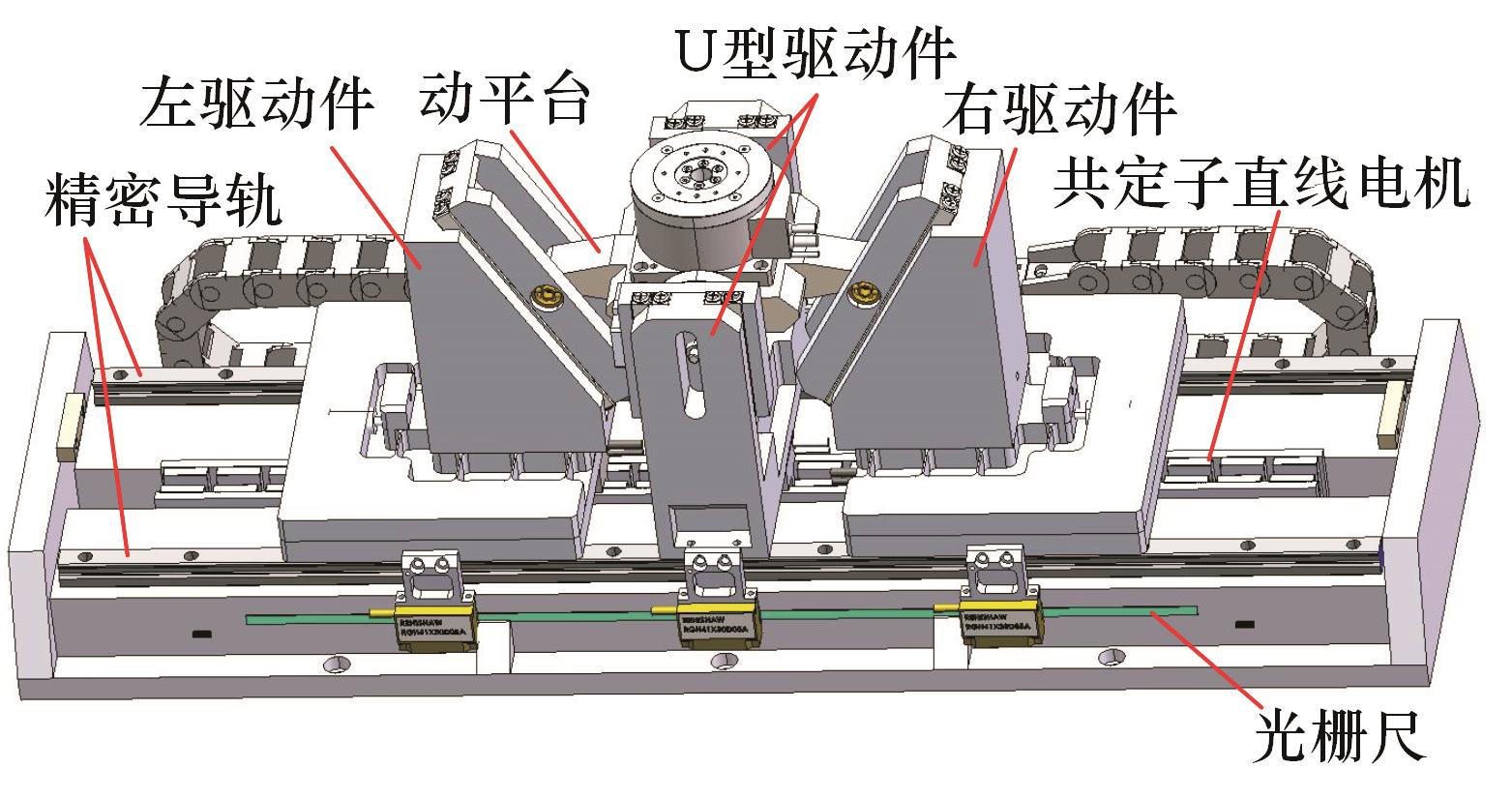
Fig. 1 Structural of a symmetric parallel motion mechanism
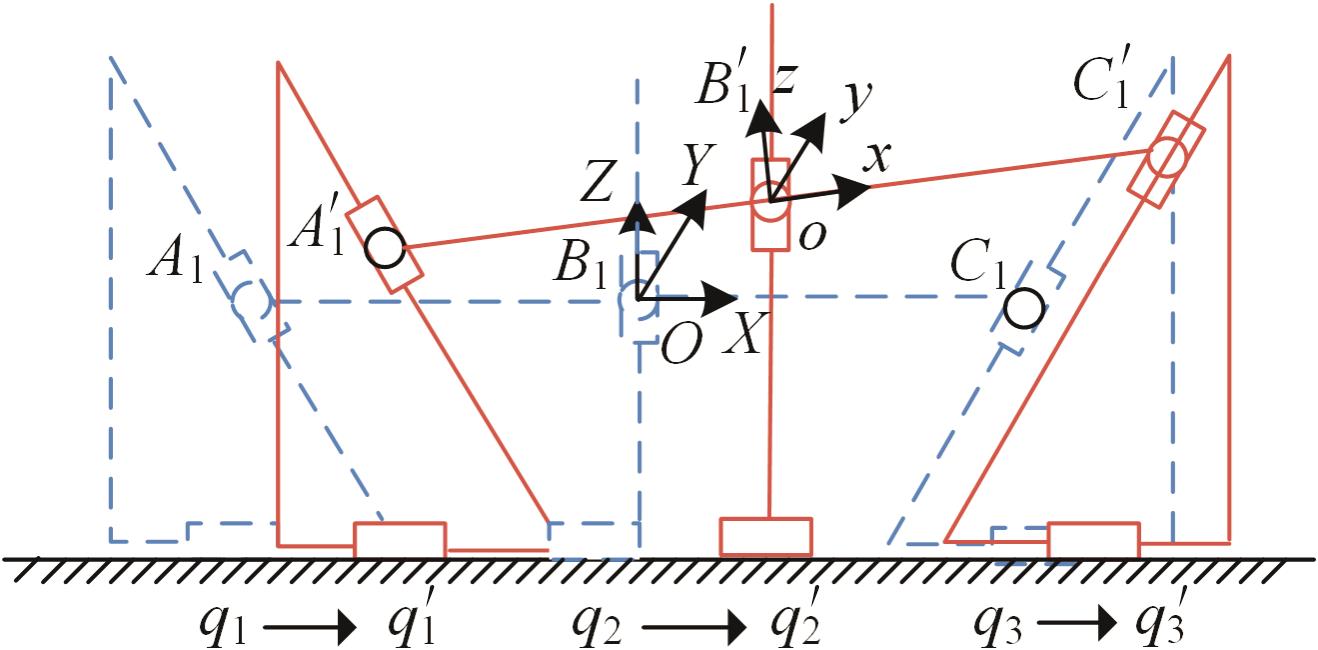
Fig. 2 Kinematic model of a symmetric parallel motion mechanism
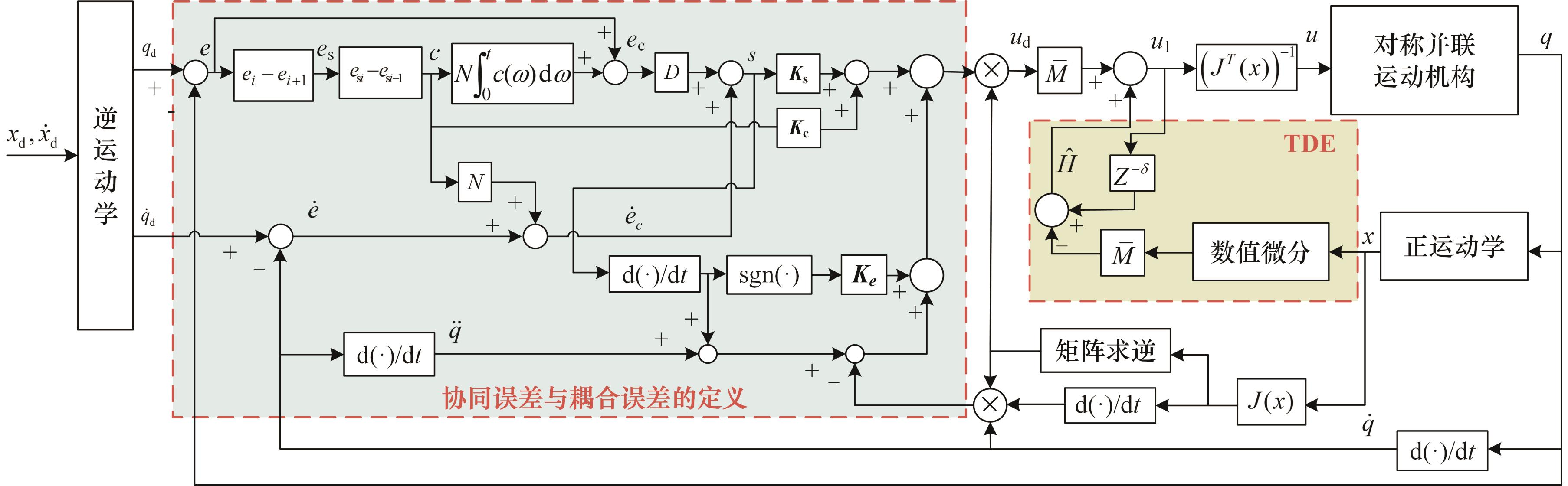
Fig. 3 Control diagram of the proposed model-free cross-coupling control method
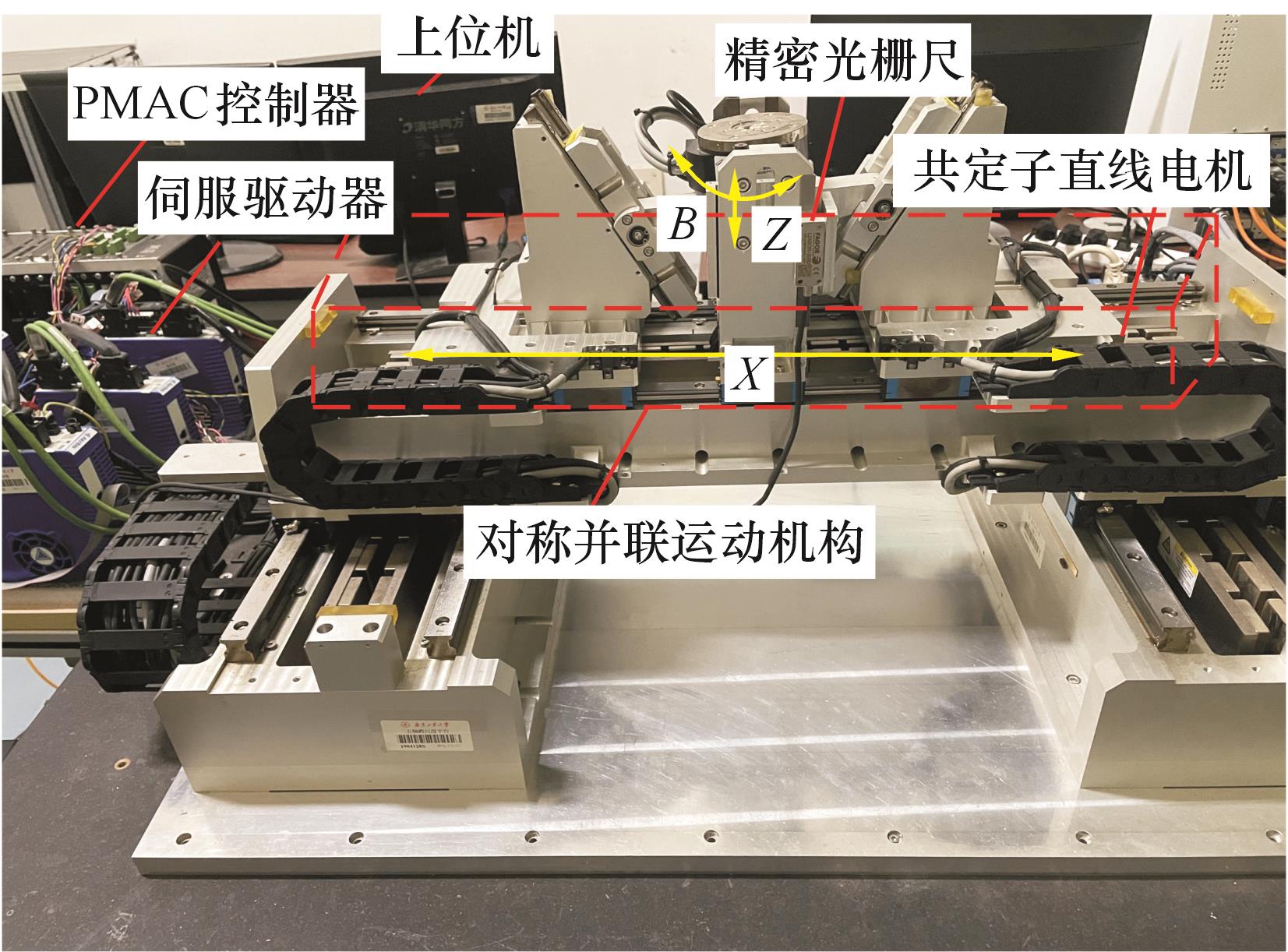
Fig.4 Experimental system of a symmetric parallel motion mechanism
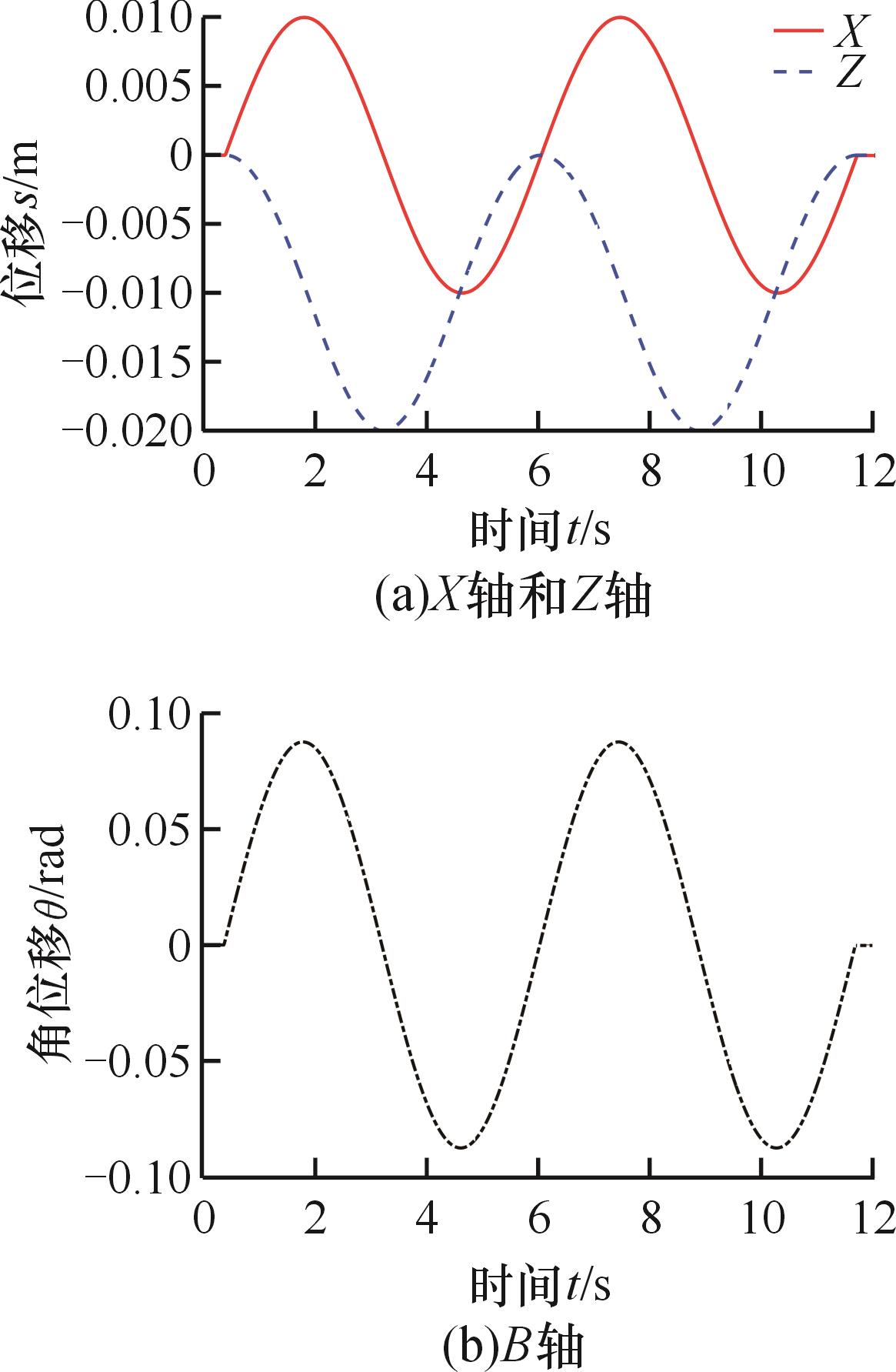
Fig.5 Desired trajectories for the X, Z and B axis
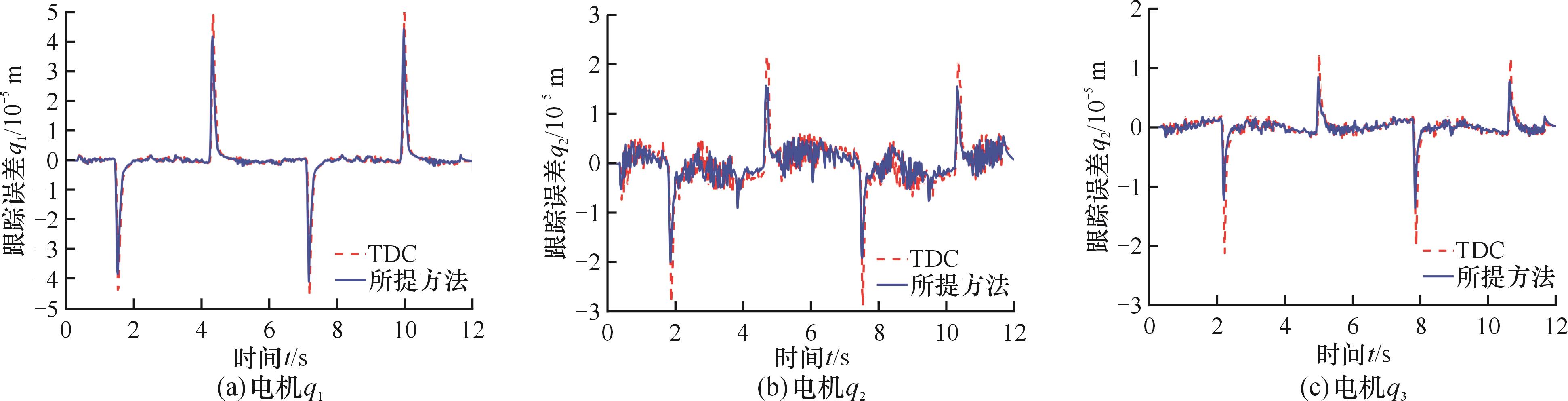
Fig.6 Tracking error in joint space with the proposed method and TDC
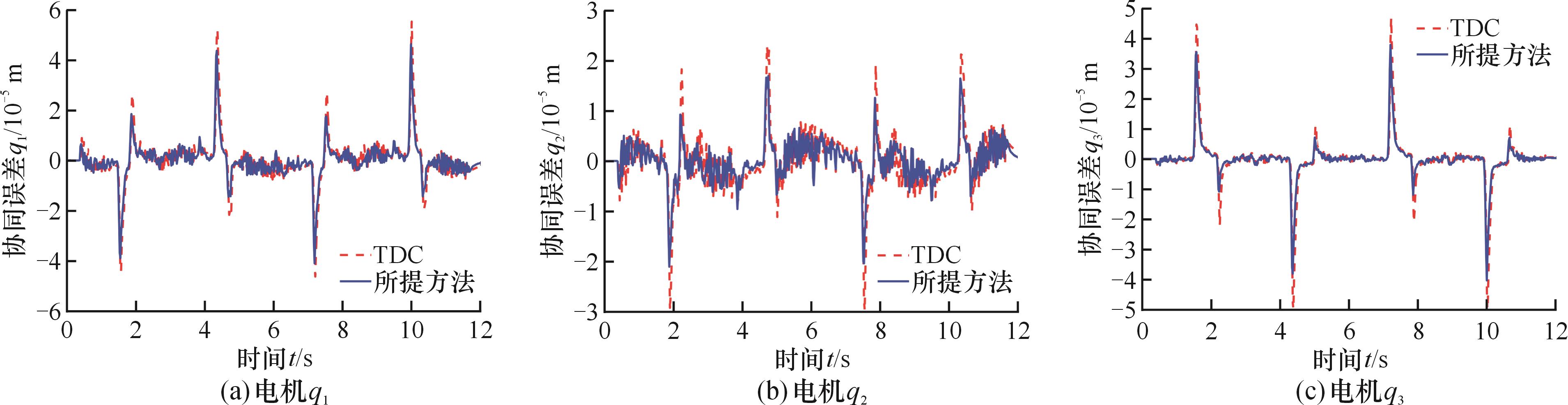
Fig.7 Cooperative error in joint space with the proposed method and TDC
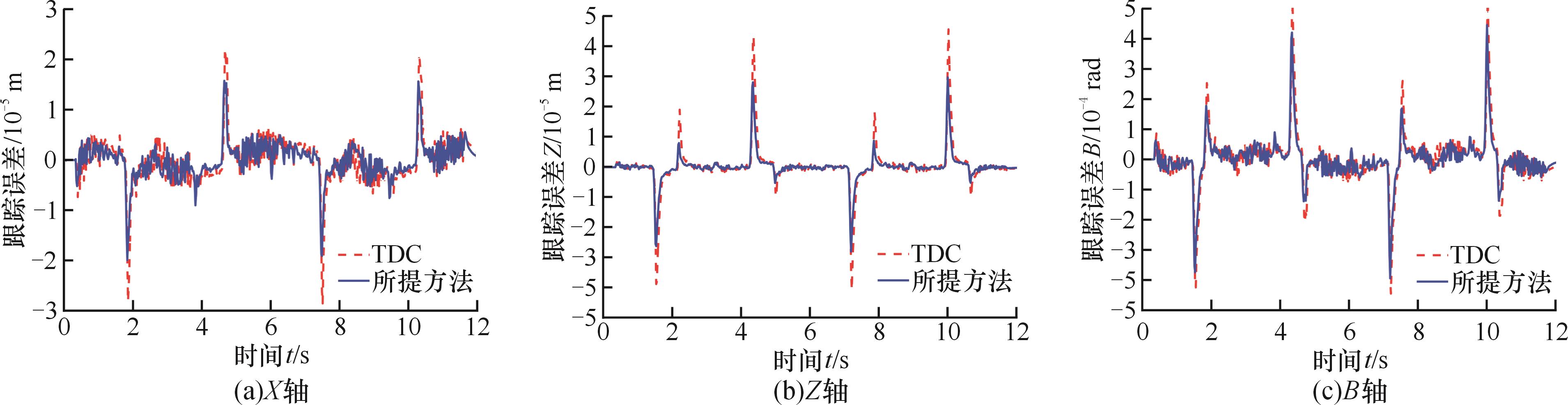
Fig.8 Tracking error in task space with the proposed method and TDC
| RMSE | IAE | ||||||
|---|---|---|---|---|---|---|---|
| q1 | q2 | q3 | q1 | q2 | q3 | ||
| 跟踪误差/μm | TDC | 7.49 | 4.91 | 2.41 | 28.21 | 39.25 | 13.35 |
| 所提方法 | 6.42 | 3.69 | 1.61 | 24.61 | 29.85 | 9.94 | |
| 减幅/% | 14.3 | 24.8 | 33.2 | 12.8 | 23.9 | 25.5 | |
| 协同误差/μm | TDC | 9.31 | 5.65 | 8.07 | 62.54 | 45.55 | 37.82 |
| 所提方法 | 7.57 | 4.21 | 6.13 | 49.16 | 34.54 | 28.46 | |
| 减幅/% | 18.7 | 25.5 | 23.9 | 21.4 | 24.2 | 24.7 | |
Tab. 1 Comparison of tracking error and cooperative error in joint space between the proposed method and TDC
| RMSE | IAE | ||||||
|---|---|---|---|---|---|---|---|
| q1 | q2 | q3 | q1 | q2 | q3 | ||
| 跟踪误差/μm | TDC | 7.49 | 4.91 | 2.41 | 28.21 | 39.25 | 13.35 |
| 所提方法 | 6.42 | 3.69 | 1.61 | 24.61 | 29.85 | 9.94 | |
| 减幅/% | 14.3 | 24.8 | 33.2 | 12.8 | 23.9 | 25.5 | |
| 协同误差/μm | TDC | 9.31 | 5.65 | 8.07 | 62.54 | 45.55 | 37.82 |
| 所提方法 | 7.57 | 4.21 | 6.13 | 49.16 | 34.54 | 28.46 | |
| 减幅/% | 18.7 | 25.5 | 23.9 | 21.4 | 24.2 | 24.7 | |
| 控制方案 | RMSE | IAE | ||||
|---|---|---|---|---|---|---|
| X/μm | Z/μm | B/μrad | X/μm | Z/μm | B/mrad | |
| TDC | 4.91 | 6.98 | 89.61 | 39.25 | 32.75 | 0.61 |
| 所提方法 | 3.69 | 4.51 | 72.88 | 29.85 | 20.95 | 0.47 |
| 减幅/% | 24.8 | 35.4 | 18.7 | 23.9 | 36.1 | 21.3 |
Tab.2 Comparison of tracking error in task space between the proposed method and TDC
| 控制方案 | RMSE | IAE | ||||
|---|---|---|---|---|---|---|
| X/μm | Z/μm | B/μrad | X/μm | Z/μm | B/mrad | |
| TDC | 4.91 | 6.98 | 89.61 | 39.25 | 32.75 | 0.61 |
| 所提方法 | 3.69 | 4.51 | 72.88 | 29.85 | 20.95 | 0.47 |
| 减幅/% | 24.8 | 35.4 | 18.7 | 23.9 | 36.1 | 21.3 |
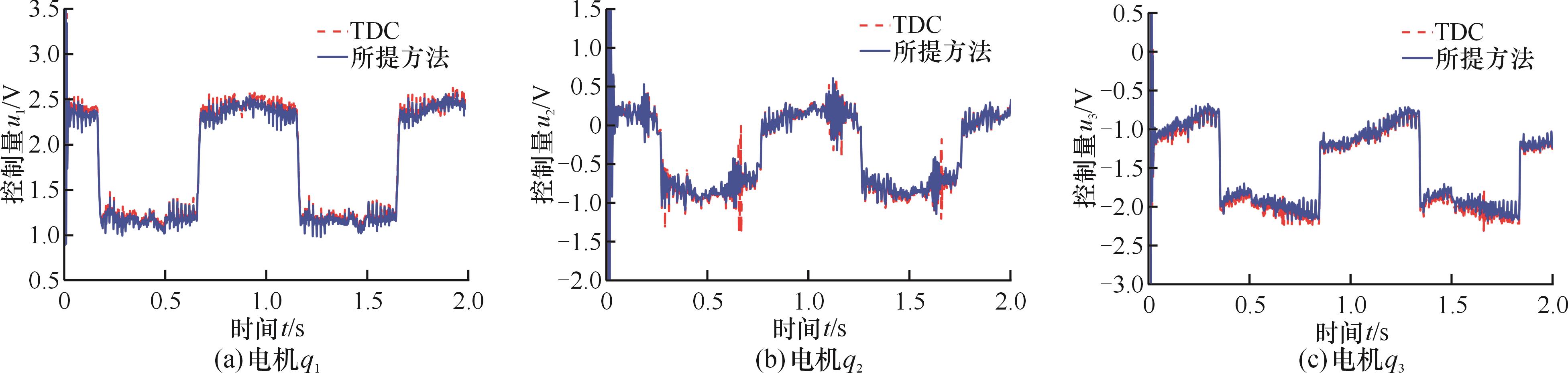
Fig.9 Servo commands for each motor of the parallel mechanism
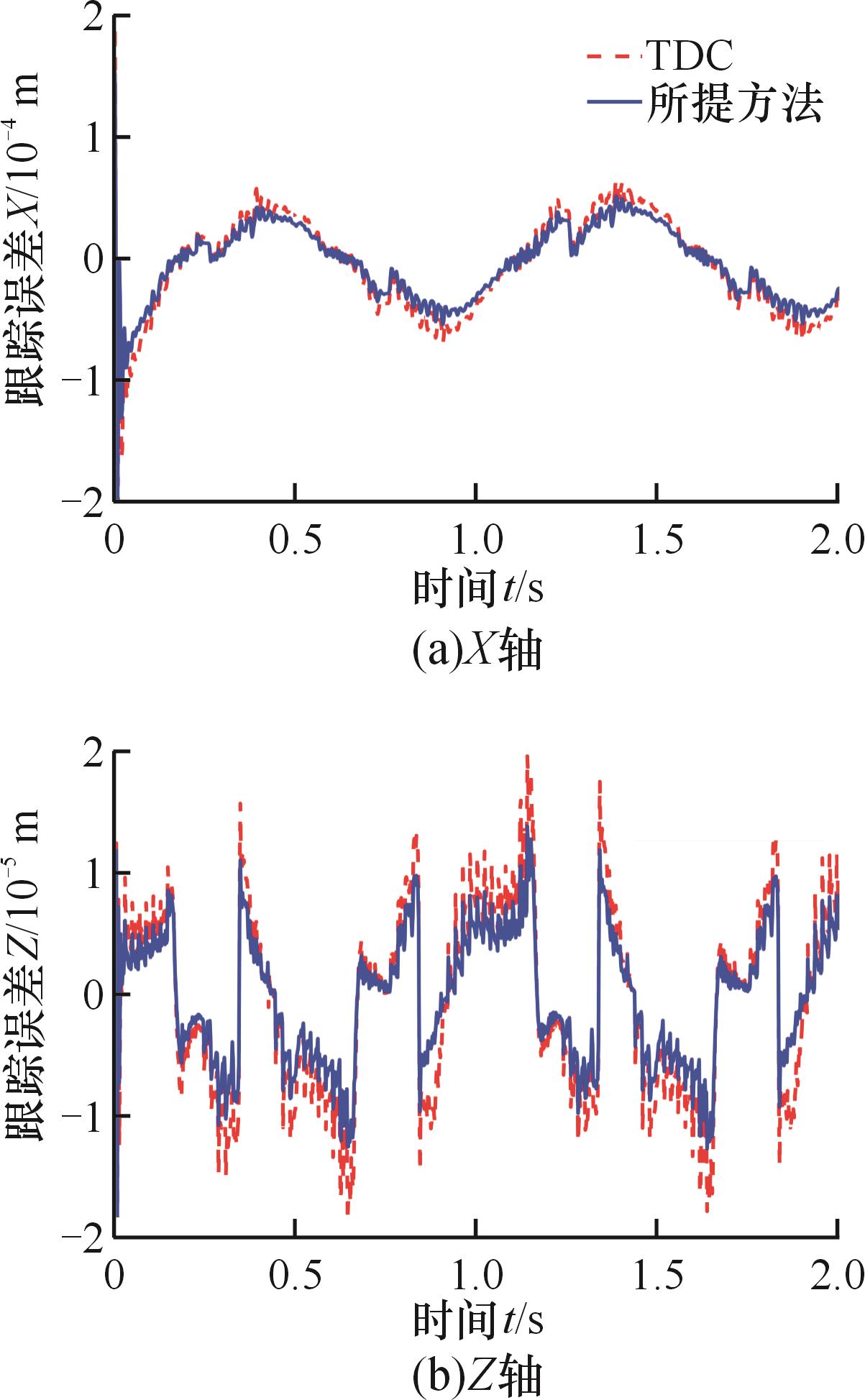
Fig.10 Tracking errors of X and Z axis of the parallel mechanism
| [1] | YAO Suhua, GAO Guoqin, GAO Zhiqiang. On Multi-axis Motion Synchronization: the Cascade Control Structure and Integrated SMC-ADRC Design[J]. ISA Transactions, 2021, 109: 259-268. |
| [2] | WANG Ke, LI Ju, SHEN Huiping, et al. Inverse Dynamics of a 3-DOF Parallel Mechanism Based on Analytical Forward Kinematics[J]. Chinese Journal of Mechanical Engineering, 2022, 35(1): 119. |
| [3] | LUO Yuheng, GAO Jian, ZHANG Lanyu, et al. Kinematic Calibration of a Symmetric Parallel Kinematic Machine Using Sensitivity-based Iterative Planning[J]. Precision Engineering, 2022, 77: 164-178. |
| [4] | 汪满新, 李兰彬, 李正亮, 等. 一类1T2R并联机构拓扑结构综合及优选[J]. 中国机械工程, 2022, 33(20): 2395-2402. |
| WANG Manxin, LI Lanbin, LI Zhengliang, et al. Topological Structure Synthesis and Optimization of 1T2R Parallel Mechanisms[J]. China Mechanical Engineering, 2022, 33(20): 2395-2402. | |
| [5] | BODIE K, TOGNON M, SIEGWART R. Dynamic End Effector Tracking with an Omnidirectional Parallel Aerial Manipulator[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8165-8172. |
| [6] | LUO Yuheng, GAO Jian, CHEN Disai, et al. Accurate Error Compensation Method for Multi-axis Parallel Machine via Singularized Jacobi Geometric Parameter Correction and Coupling Error Evaluation[J]. Robotics and Computer-Integrated Manufacturing, 2024, 89: 102771. |
| [7] | YAN Peng, HUANG Hailin, LI Bing, et al. A 5-DOF Redundantly Actuated Parallel Mechanism for Large Tilting Five-face Machining[J]. Mechanism and Machine Theory, 2022, 172: 104785. |
| [8] | 梁旭, 苏婷婷, 侯增广, 等. 基于变阻抗控制的冗余驱动并联机器人多目标内力优化[J]. 自动化学报, 2023, 49(5): 1099-1115. |
| LIANG Xu, SU Tingting, HOU Zengguang, et al. A Multi-objective Internal Preload Optimization Method of Redundantly Actuated Parallel Robots Based on Variable Impedance Control[J]. Acta Automatica Sinica, 2023, 49(5): 1099-1115. | |
| [9] | HE Yuhang, WU Yaozhong, LI Weijia. Nonlinear Extended State Observer-based Adaptive Higher-order Sliding Mode Control for Parallel Antenna Platform with Input Saturation[J]. Nonlinear Dynamics, 2023, 111(17): 16111-16132. |
| [10] | YANG Xu, ZHU Wule. Design, Analysis, and Control of an XY Parallel Nanomanipulator with Multiple Actuation Modes[J]. IEEE Transactions on Industrial Electronics, 2020, 67(9): 7639-7648.[LinkOut] |
| [11] | KHALILPOUR S A, KHORRAMBAKHT R, TAGHIRAD H D, et al. Robust Cascade Control of a Deployable Cable-driven Robot[J]. Mechanical Systems and Signal Processing, 2019, 127: 513-530. |
| [12] | ALTAN A, HACiOĞLU R. Model Predictive Control of Three-axis Gimbal System Mounted on UAV for Real-time Target Tracking under External Disturbances[J]. Mechanical Systems and Signal Processing, 2020, 138: 106548. |
| [13] | SHANG Weiwei, CONG Shuang, GE Yuan. Coordination Motion Control in the Task Space for Parallel Manipulators with Actuation Redundancy[J]. IEEE Transactions on Automation Science and Engineering, 2013, 10(3): 665-673. |
| [14] | AFLAKIAN A, SAFARYAZDI A, TALE MASOULEH M, et al. Experimental Study on the Kinematic Control of a Cable Suspended Parallel Robot for Object Tracking Purpose[J]. Mechatronics, 2018, 50: 160-176. |
| [15] | SHANG Weiwei, ZHANG Bin, CONG Shuang, et al. Dual-space Adaptive Synchronization Control of Redundantly-actuated Cable-driven Parallel Robots[J]. Mechanism and Machine Theory, 2020, 152: 103954. |
| [16] | MERLET J P. Simulation of Discrete-time Controlled Cable-driven Parallel Robots on a Trajectory[J]. IEEE Transactions on Robotics, 2017, 33(3): 675-688. |
| [17] | PI Yangjun, WANG Xuanyin. Observer-based Cascade Control of a 6-DOF Parallel Hydraulic Manipulator in Joint Space Coordinate[J]. Mechatronics, 2010, 20(6): 648-655. |
| [18] | ZHANG Gang, WU Jianhua, LIU Pinkuan, et al. Dynamic Analysis and Model-based Feedforward Control of a 2-DOF Translational Parallel Manipulator Driven by Linear Motors[J]. Industrial Robot, 2013, 40(6): 597-609. |
| [19] | LIU Xiaofei, YAO Jiantao, LI Qi, et al. Coordination Dynamics and Model-based Neural Network Synchronous Controls for Redundantly Full-actuated Parallel Manipulator[J]. Mechanism and Machine Theory, 2021, 160: 104284. |
| [20] | ZHAN Boyu, ZHANG Lanyu, LIU Yachao, et al. Model Predictive and Compensated ADRC for Permanent Magnet Synchronous Linear Motors[J]. ISA Transactions, 2023, 136: 605-621. |
| [21] | 商德勇, 黄欣怡, 黄云山, 等. 基于Kane方程的Delta并联机器人刚柔耦合动力学研究[J]. 机械工程学报, 2024, 60(7): 124-133. |
| SHANG Deyong, HUANG Xinyi, HUANG Yunshan, et al. Research on Rigid-flexible Coupling Dynamics of Delta Parallel Robot Based on Kane Equation[J]. Journal of Mechanical Engineering, 2024, 60(7): 124-133. | |
| [22] | ZHU Baojun, LI Erwei, ZHAO Tieshi, et al. Dynamic Characteristics of Series-parallel Hybrid Rigid-flexible Coupling Double-mass Underactuated System on Floating Platform[J]. Mechanism and Machine Theory, 2023, 179: 105132.[LinkOut] |
| [23] | SHI Pengwei, SUN Weichao, YANG Xuebo, et al. Master-slave Synchronous Control of Dual-drive Gantry Stage with Cogging Force Compensation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 53(1): 216-225. |
| [24] | ZHONG Yongbin, GAO Jian, ZHANG Lanyu. Fractional-order Feedforward Control Method for Permanent Magnet Linear Synchronous Motor Based on Frequency-domain Adjustment Theory[J]. Mechanical Systems and Signal Processing, 2023, 190: 110115. |
| [25] | LIU Zhitai, LIN Weiyang, YU Xinghu, et al. Approximation-free Robust Synchronization Control for Dual-linear-motors-driven Systems with Uncertainties and Disturbances[J]. IEEE Transactions on Industrial Electronics, 2021, 69(10): 10500-10509. |
| [26] | XIE Bin, LEI Li, YAO Yuan, et al. Advanced Synchronous Control of Dual Parallel Motion Systems[J]. IEEE Transactions on Industrial Electronics, 2022, 70(2): 1270-1281. |
| [27] | 张鑫, 刘金国. 基于时延估计的空间机器人无模型姿态解耦控制[J]. 宇航学报, 2021, 42(9): 1150-1161. |
| ZHANG Xin, LIU Jinguo. Model-free Attitude Decoupling Control of Space Robots Based on Time- delay Estimation[J]. Journal of Astronautics, 2021, 42(9): 1150-1161. |
| [1] | HE Yang, LI Gang, YU Xiaonan. Research on Fuzzy Model Predictive Control Method for High Speed Intelligent Vehicles Based on Variable Universe [J]. China Mechanical Engineering, 2025, 36(03): 604-613. |
| [2] | SUN Feng1, ZHU Anjie1, ZHANG Ming1, PEI Wenzhe1, JIN Junjie1, ZHANG Weiwei2, TANG Junyue2, JIANG Shengyuan2. Design and Tests of Lunar Spring-recovery Rope-driven Sampling Robot Arm [J]. China Mechanical Engineering, 2024, 35(11): 1977-1985. |
| [3] | YU Shengdong1, 2, 3, LI Xiaopeng1, 2, YANG Sipeng2, WU Hongyuan1, 2, HU Wenke1, 2, CAI Bofan1, 2, MA Jinyu3. High-resolution Microscope Motion Control Based on Adaptive Finite-time Control Strategy [J]. China Mechanical Engineering, 2024, 35(09): 1688-1697. |
| [4] | LIU Songyong1, WU Hongzhuang2, CHENG Cheng2, SONG Mingjiang1, 3, CUI Yuming4. Self-positioning Cutting Control Methods and Experimental Research for Coal Mine Roadheaders [J]. China Mechanical Engineering, 2024, 35(07): 1318-1329. |
| [5] | LIU Junling, FENG Ganghui, ZHANG Junjiang, YANG Kai. Fusion Research of Trajectory Tracking Energy-saving Control of Unmanned Hybrid Vehicles [J]. China Mechanical Engineering, 2024, 35(04): 678-690. |
| [6] | MEI Jie, QIN Jiarui, CHEN Dingfang, CHEN Kun, . SLAM-based Underwater Image Enhanced Visual 3D Reconstruction Method [J]. China Mechanical Engineering, 2024, 35(02): 268-279. |
| [7] | SUI Xin, LIU Chunyang, ZHAN Kun, WANG Zhangfei, ZHANG Yihui, . Research on Safety Performance of Lane Keeping Assist Systems Based on Human-machine Cooperative Control [J]. China Mechanical Engineering, 2021, 32(16): 1994-2001. |
| [8] | LI Yang1,2,3;LIU Ziming1,2,4;CHEN Qingying1,2,3. Decoupling Active Caster Omnidirectional Mobile Robot Tracking Control Considering Slip Interferences [J]. China Mechanical Engineering, 2020, 31(18): 2247-2253. |
| [9] | QIN Yanming;ZHAO Jingyi;MA Jinyu;WANG Jianjun. Trajectory Tracking Control of Eight-DOF Manipulators [J]. China Mechanical Engineering, 2019, 30(22): 2741-2747,2756. |
| [10] | HUANG Daomin1,2;HAN Lijun1;TANG Guoyuan1;ZHOU Zengcheng1;XU Guohua1. Fractional Integral Sliding Mode Control for Trajectory Tracking of Underwater Manipulators [J]. China Mechanical Engineering, 2019, 30(13): 1513-1518. |
| [11] | BEI Xuying1,2;PING Xueliang1,2;GAO Wenyan1,2. Trajectory Tracking Control of Wheeled Mobile Robots under Longitudinal Slipping Conditions [J]. China Mechanical Engineering, 2018, 29(16): 1958-1964. |
| [12] | YE Jinhua, WU Haibin. Unified Adaptive Neural Network H∞ Control of Uncertain Wheeled Mobile Robots [J]. China Mechanical Engineering, 2017, 28(02): 150-155. |
| [13] | Shen Yongpeng1;Wang Yaonan1;Meng Bumin1;Yi Dihua2. Cooperative Control Strategy of Power Following-speed Switching in a Range Extender Electric Vehicle APU [J]. China Mechanical Engineering, 2015, 26(12): 1690-1696. |
| [14] | Ye Jinhua, Li Di, Ye Feng. Adaptive Fuzzy Control of Nonholonomic Mobile Robots with Bounded Inputs [J]. China Mechanical Engineering, 2014, 25(8): 1010-1016. |
| [15] | Dong Xiaoxing, Li Ge, Liu Gangfeng, Zhao Jie. Kinematics and Cartesian Impedance Control for Redundant Space Robotic Arm [J]. China Mechanical Engineering, 2014, 25(1): 36-41. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||