

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (3): 634-644.DOI: 10.3969/j.issn.1004-132X.2026.03.013
YI Yali1,2( ), CHENG Yangyang2, CHEN Xiaowei2, YANG Wenbo2, JIN Herong1,2
), CHENG Yangyang2, CHEN Xiaowei2, YANG Wenbo2, JIN Herong1,2
Received:2025-01-14
Online:2026-03-25
Published:2026-04-08
Contact:
YI Yali
宜亚丽1,2(), 程阳洋2, 陈晓卫2, 杨文博2, 金贺荣1,2
通讯作者:
宜亚丽
作者简介:宜亚丽*(通信作者),女,1976年生,副教授、博士研究生导师。研究方向为机器人加工技术与系统动力学。E-mail: yiyali@ysu.edu.cn。
基金资助:CLC Number:
YI Yali, CHENG Yangyang, CHEN Xiaowei, YANG Wenbo, JIN Herong. Research on Chatter Recognition and Suppression Methods for Robotic Milling of Thin-walled Cylinders[J]. China Mechanical Engineering, 2026, 37(3): 634-644.
宜亚丽, 程阳洋, 陈晓卫, 杨文博, 金贺荣. 薄壁筒件机器人铣削颤振识别及抑制方法研究[J]. 中国机械工程, 2026, 37(3): 634-644.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.03.013
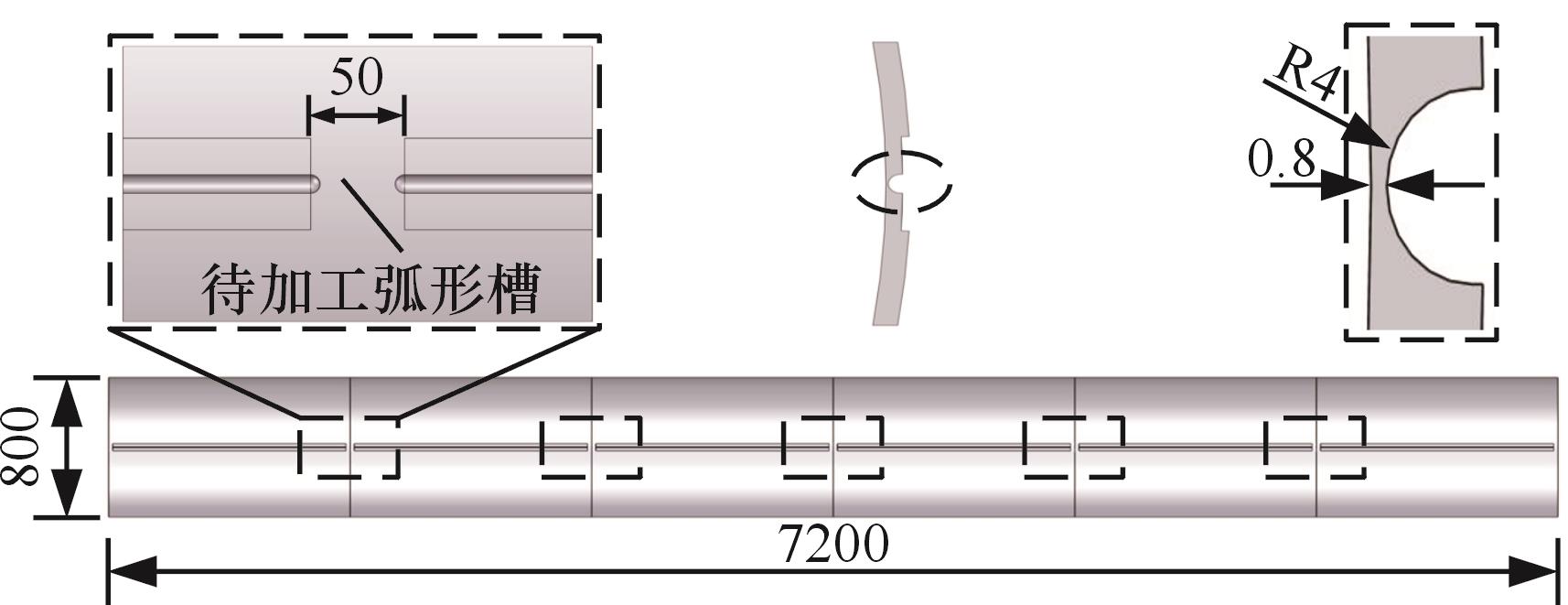
Fig.1 Thin-walled cylinder
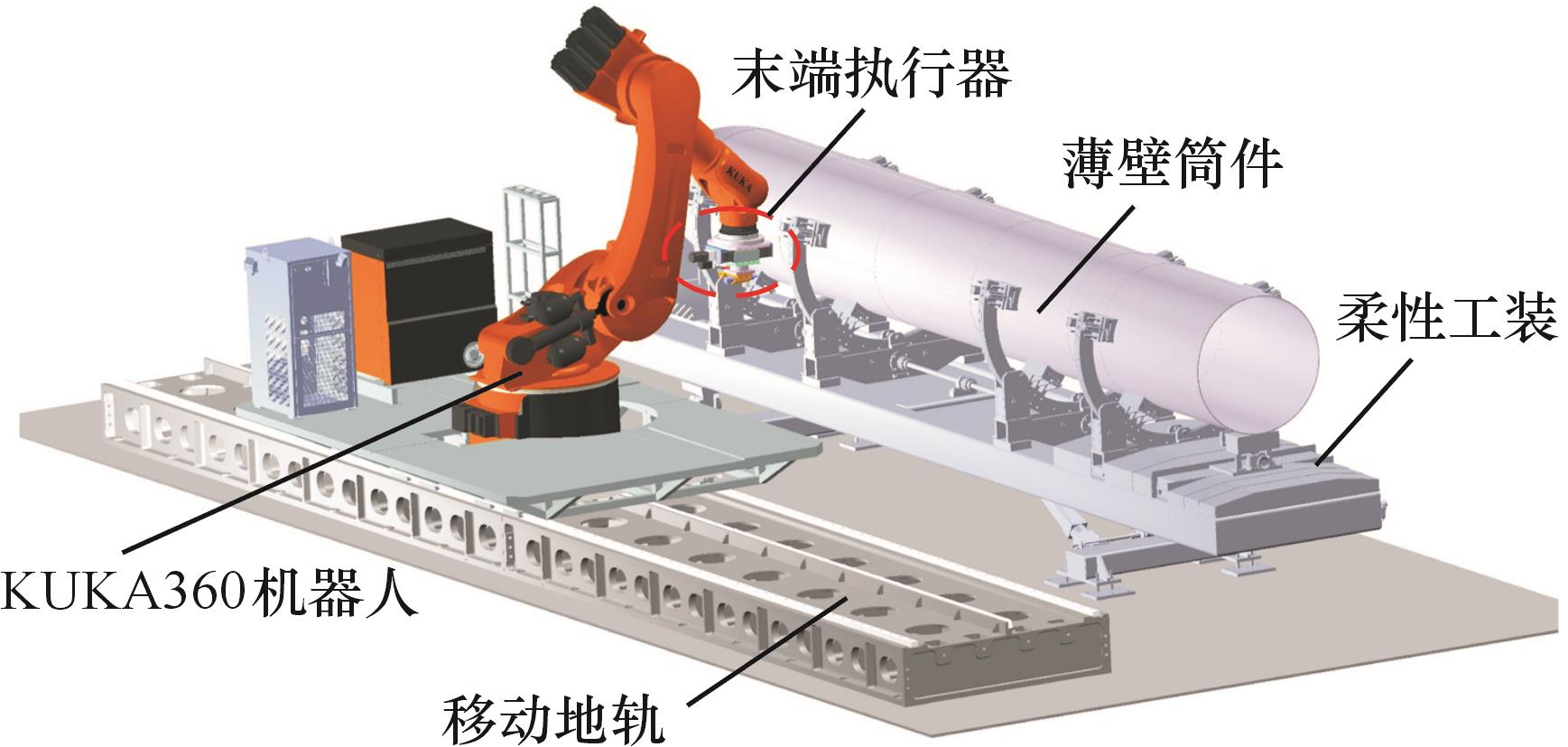
Fig.2 Robotic milling system
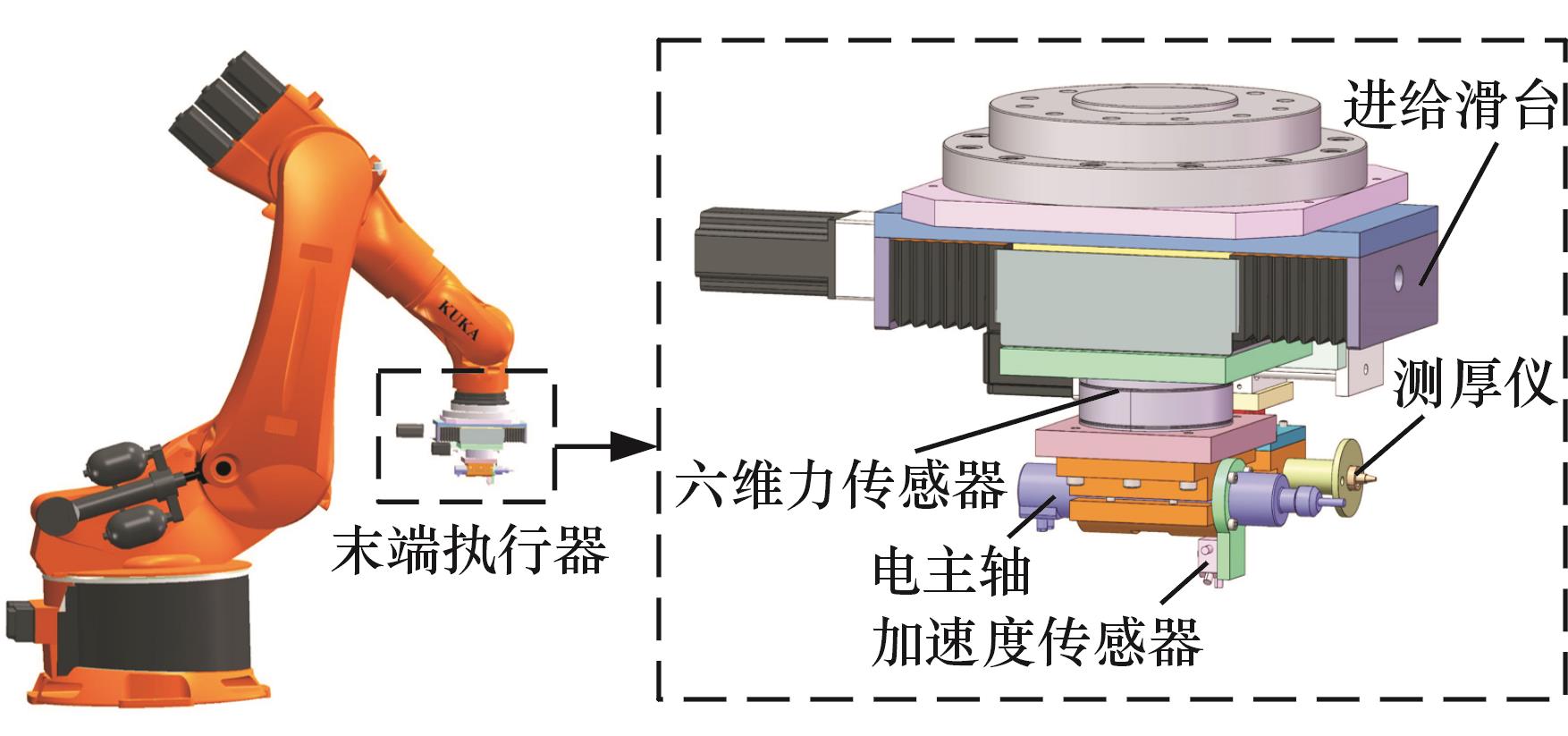
Fig.3 Robotic end-effector
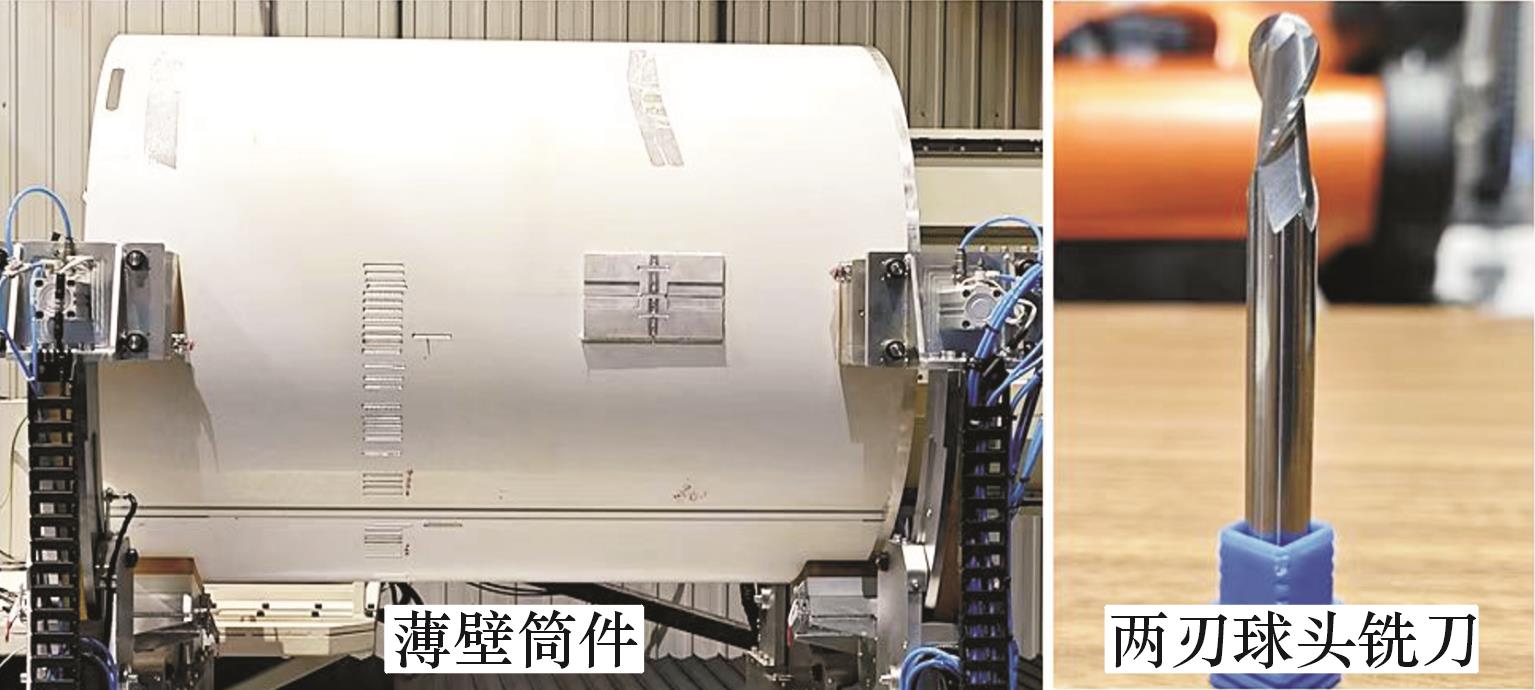
Fig.4 Test piece and milling cutter
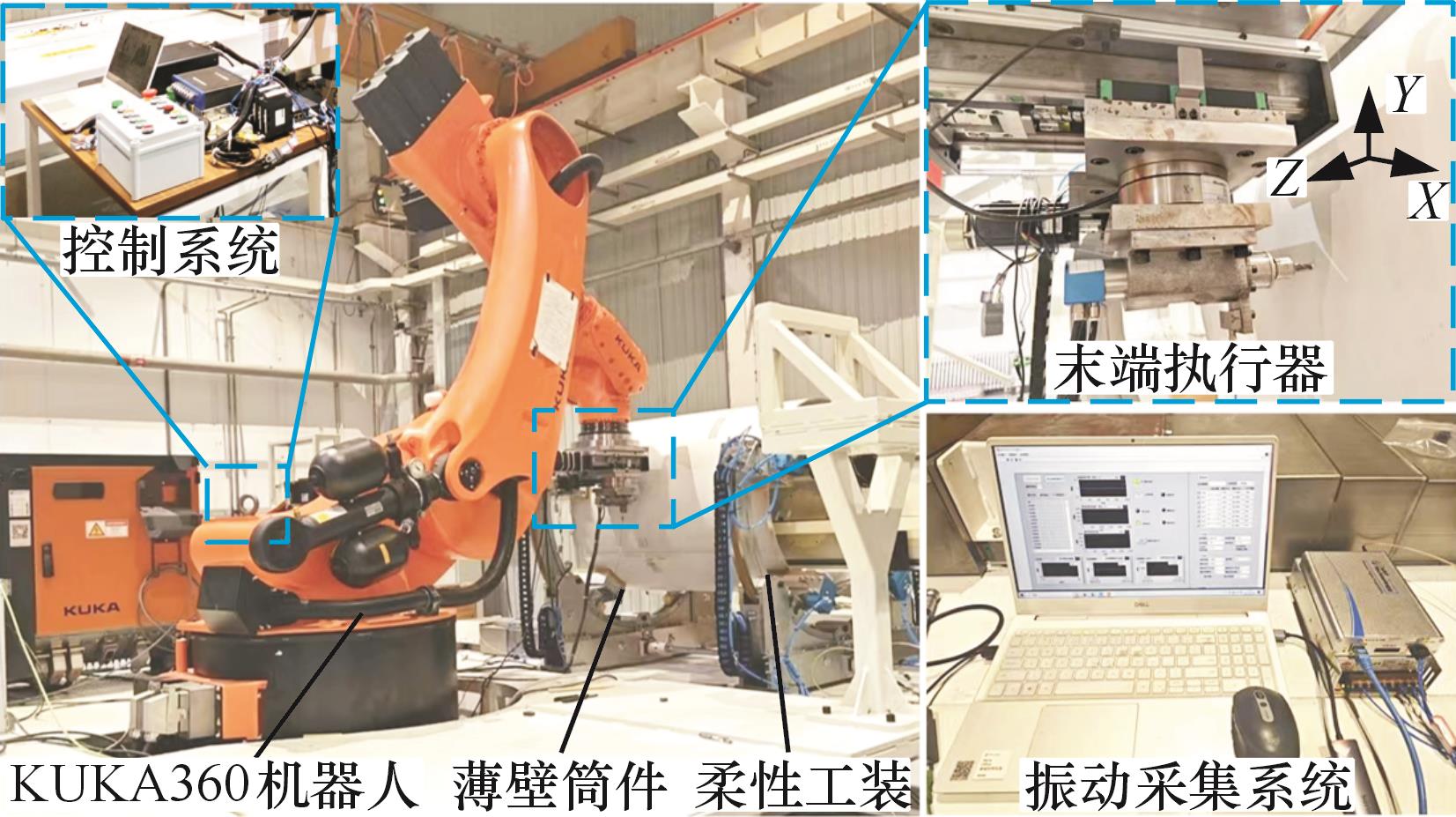
Fig.5 Robot milling test bed
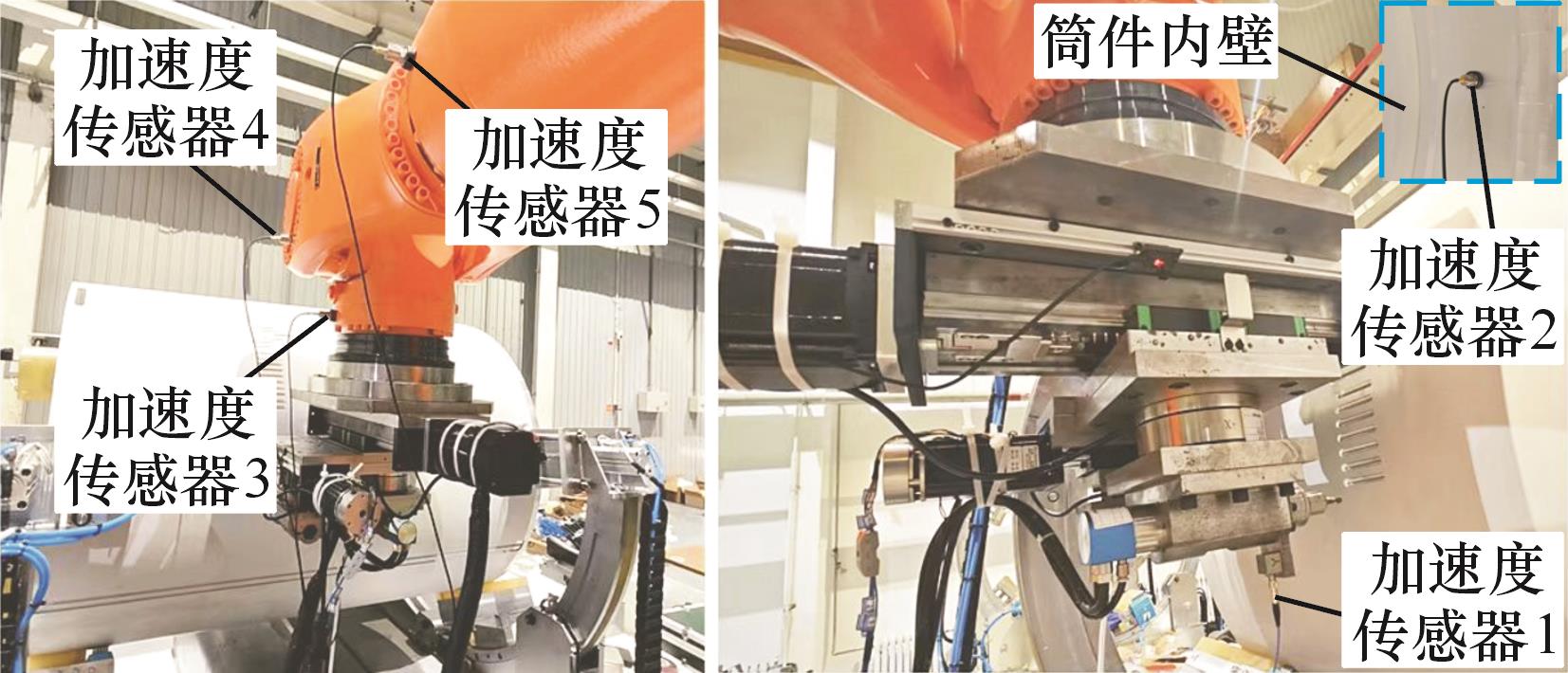
Fig.6 Acceleration sensor arrangement
| θ1 | θ2 | θ3 | θ4 | θ5 | θ6 | |
|---|---|---|---|---|---|---|
| 下刀点 | -13.43 | -80.36 | 117.50 | -0.24 | 52.79 | 2.62 |
| 退刀点 | -15.27 | -79.87 | 116.87 | -0.23 | 52.92 | 0.77 |
Tab.1 Robot joint angles
| θ1 | θ2 | θ3 | θ4 | θ5 | θ6 | |
|---|---|---|---|---|---|---|
| 下刀点 | -13.43 | -80.36 | 117.50 | -0.24 | 52.79 | 2.62 |
| 退刀点 | -15.27 | -79.87 | 116.87 | -0.23 | 52.92 | 0.77 |
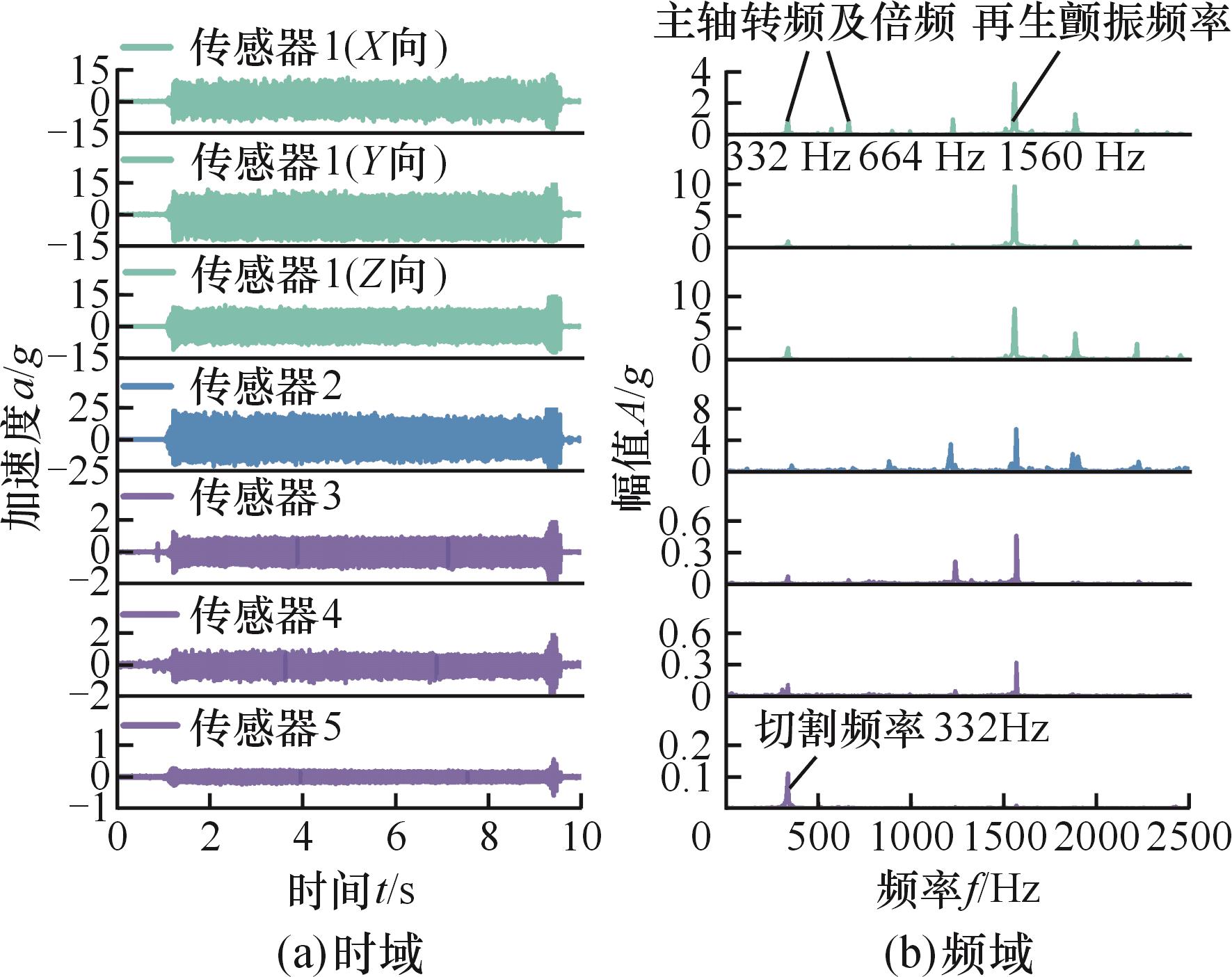
Fig.7 Time/frequency domain plots of signals in each region
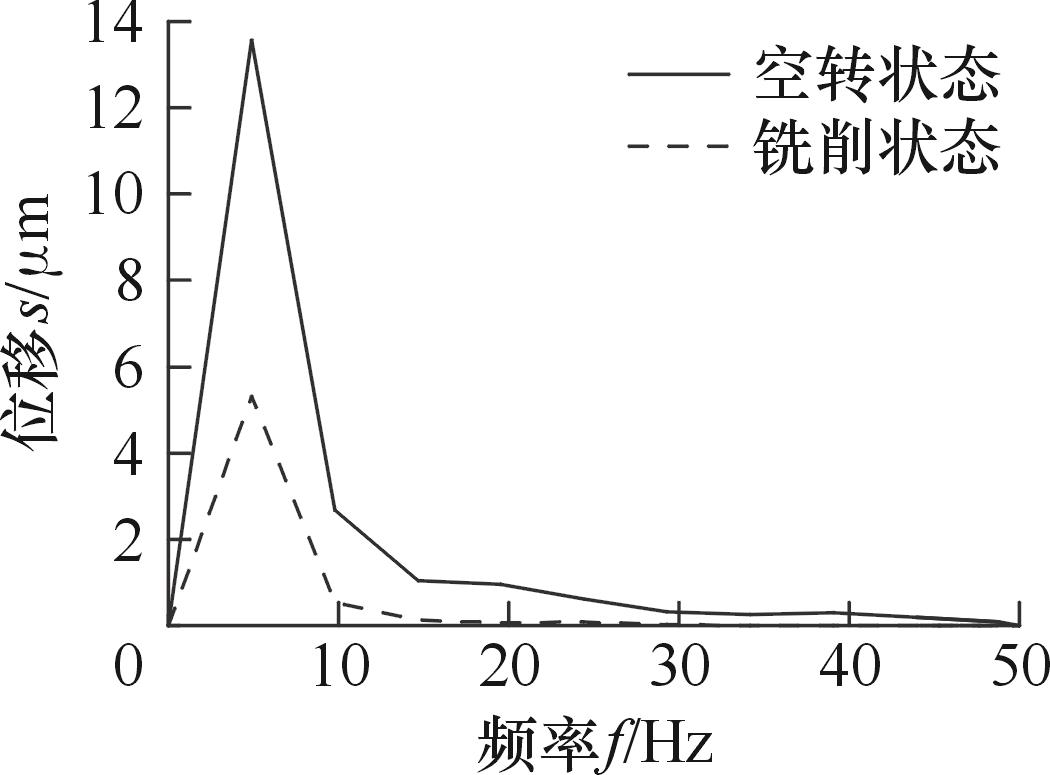
Fig.8 Frequency-domain diagram of displacement in the low-frequency region
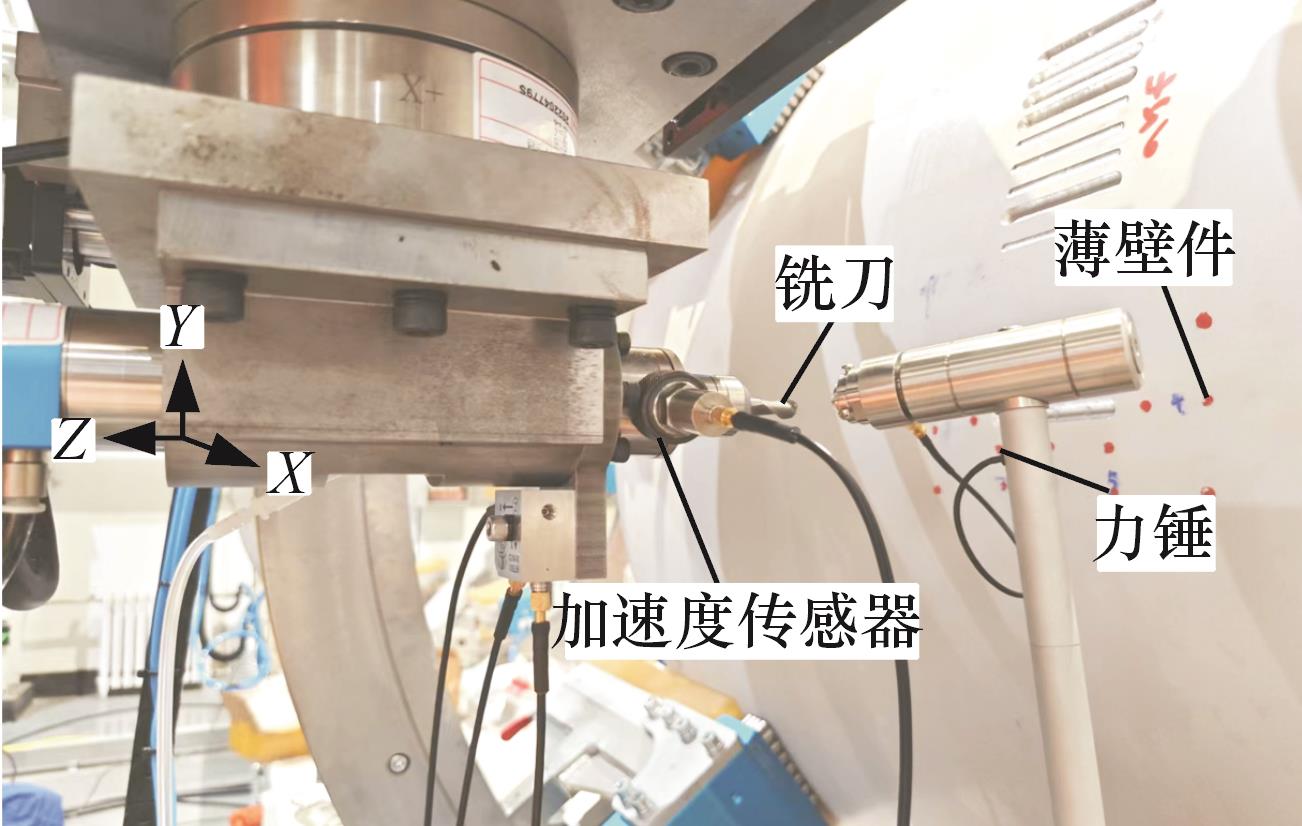
Fig.9 Robotic milling system and hammer impact test diagram of thin-walled component
| 模态阶次 | 频率/Hz | 阻尼比/% | 振型系数 | 模态质量/kg | |
|---|---|---|---|---|---|
| 机器人铣削系统 | 1阶 | 523.24 | 1.6 | 0.033 | 9.47 |
| 2阶 | 1407.14 | 12.4 | 0.047 | 0.86 | |
| 3阶 | 1734.22 | 4.3 | 0.016 | 7.27 | |
| 薄壁件 | 1阶 | 1235.14 | 2.5 | 0.035 | 5.71 |
| 2阶 | 1661.52 | 1.7 | 0.017 | 17.30 | |
| 3阶 | 1836.51 | 2.6 | 0.038 | 5.06 |
Tab.2 Modal parameters table of robotic milling system for thin-walled components
| 模态阶次 | 频率/Hz | 阻尼比/% | 振型系数 | 模态质量/kg | |
|---|---|---|---|---|---|
| 机器人铣削系统 | 1阶 | 523.24 | 1.6 | 0.033 | 9.47 |
| 2阶 | 1407.14 | 12.4 | 0.047 | 0.86 | |
| 3阶 | 1734.22 | 4.3 | 0.016 | 7.27 | |
| 薄壁件 | 1阶 | 1235.14 | 2.5 | 0.035 | 5.71 |
| 2阶 | 1661.52 | 1.7 | 0.017 | 17.30 | |
| 3阶 | 1836.51 | 2.6 | 0.038 | 5.06 |
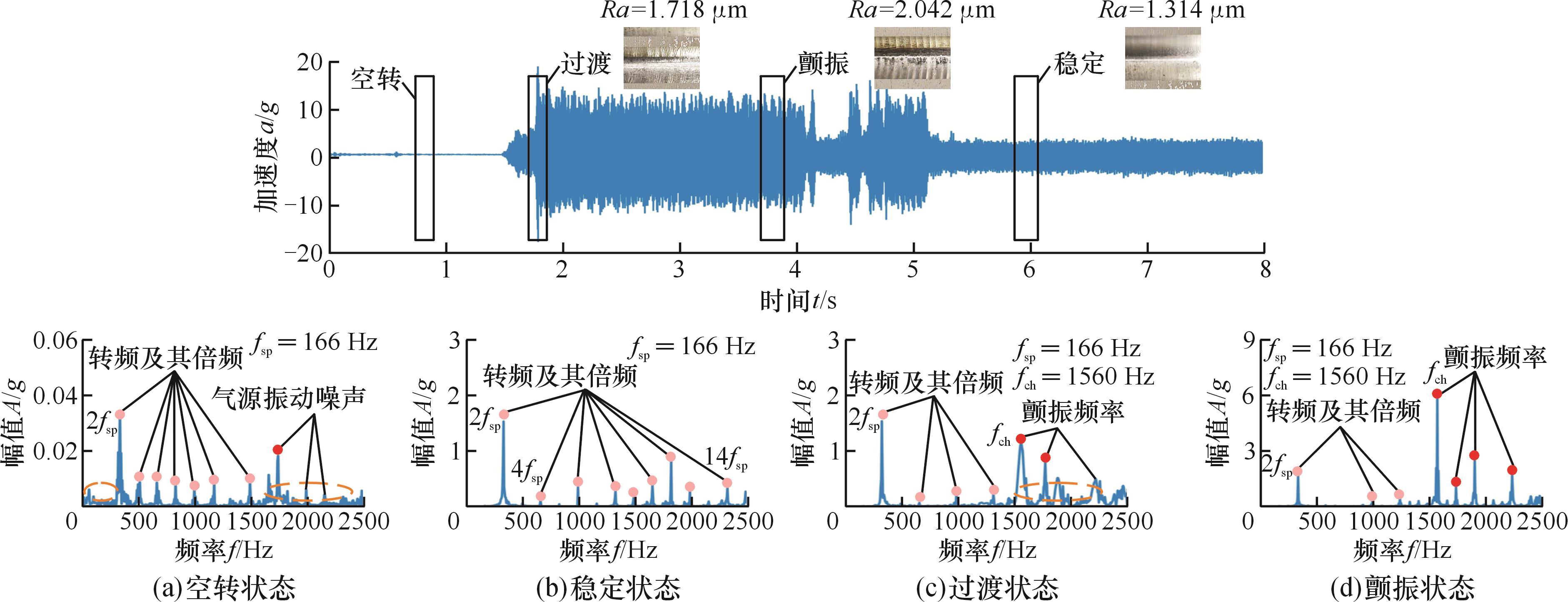
Fig.10 Time/frequency domain plots for different milling states
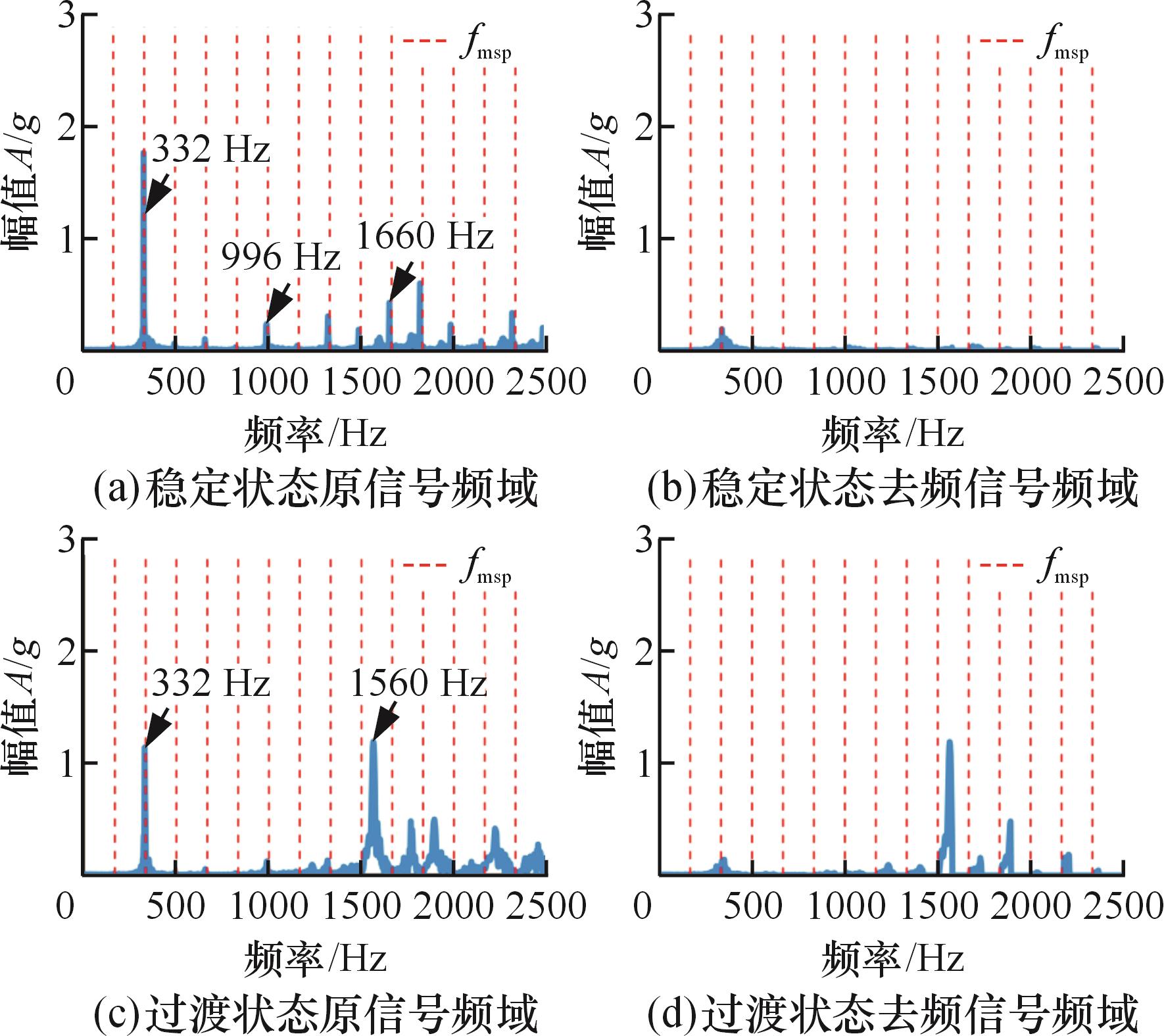
Fig.11 Comparison of original signal and de-frequency signal
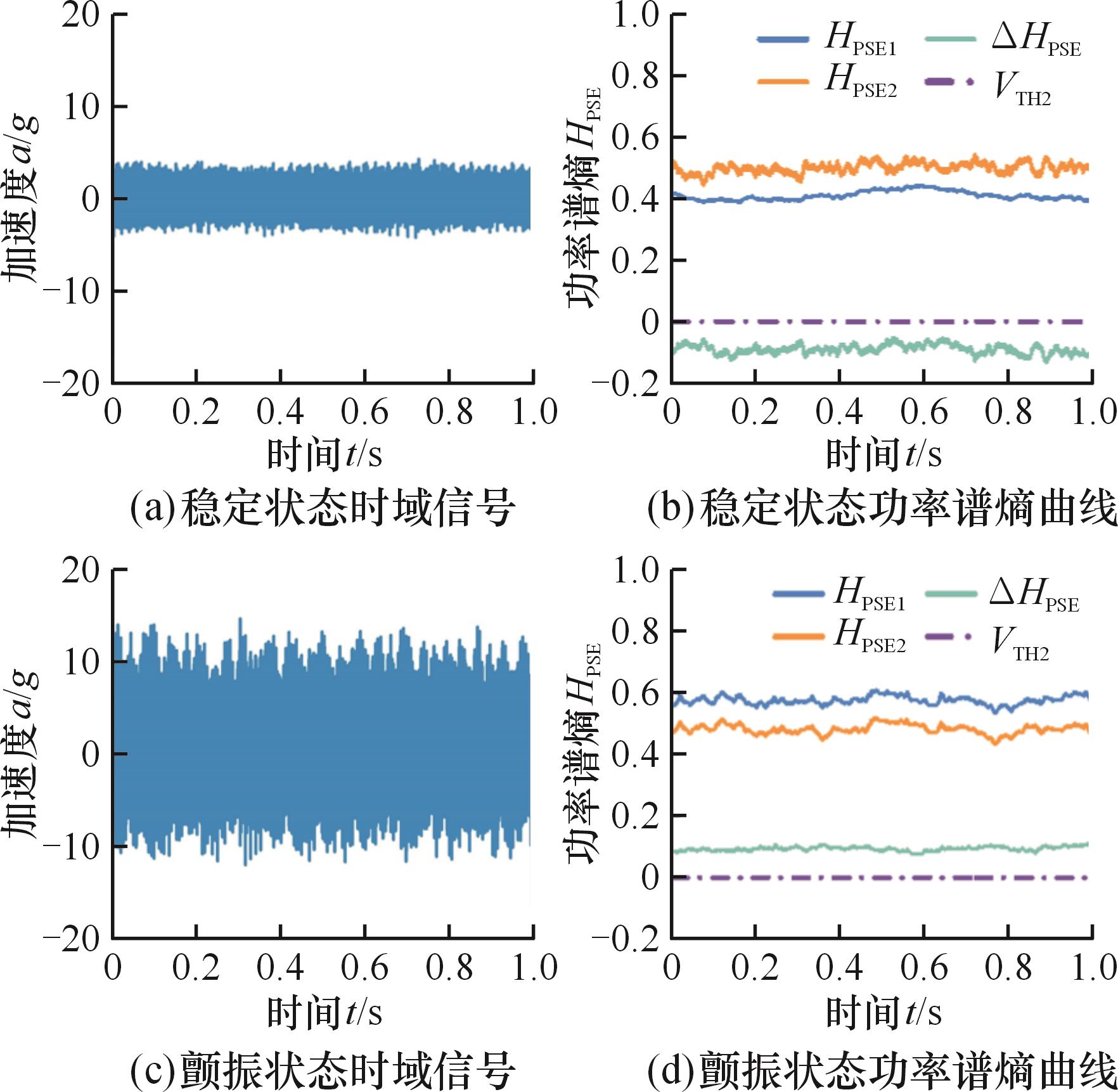
Fig.12 Power spectrum entropy curves
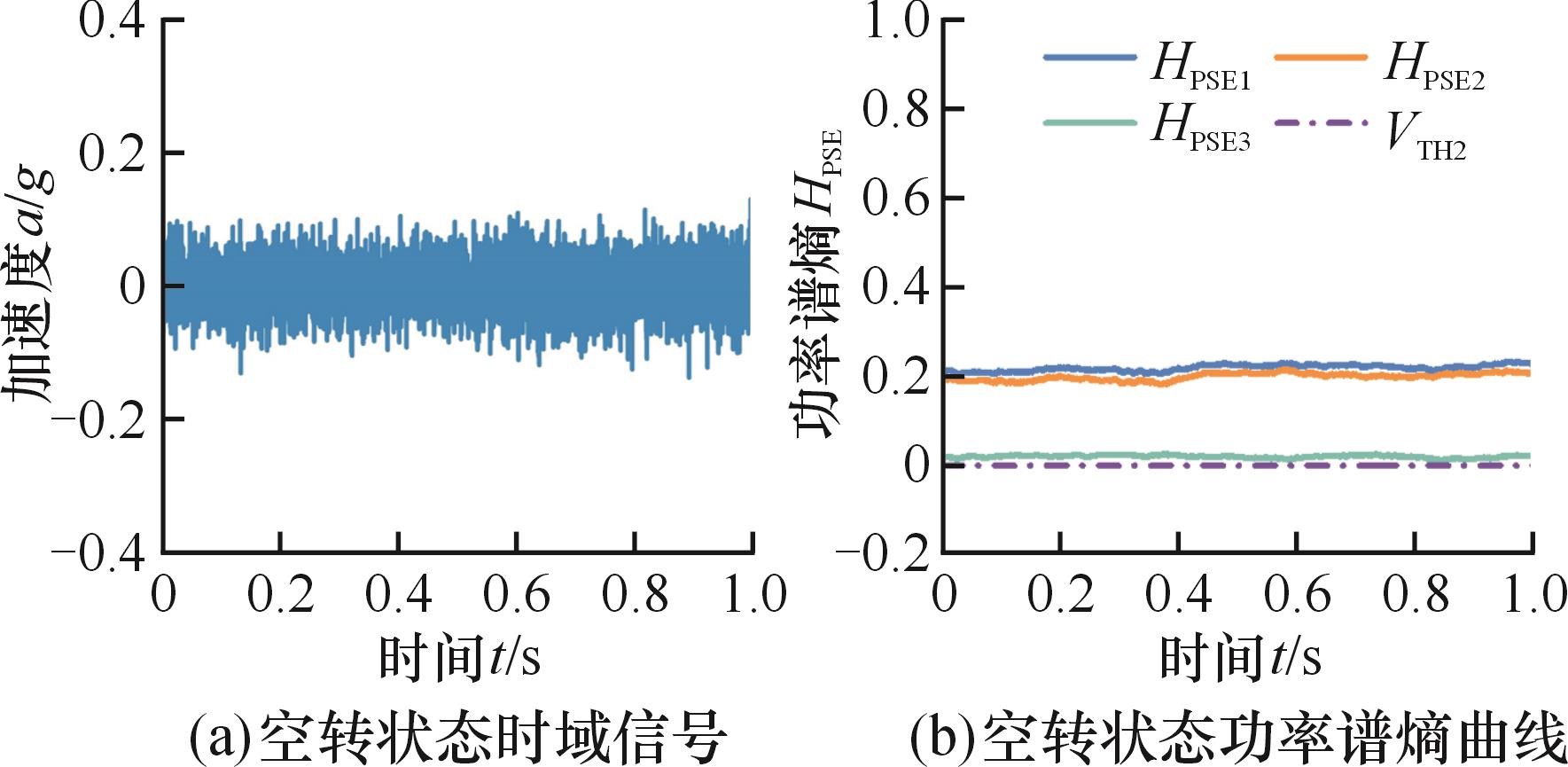
Fig.13 Power spectrum entropy curves of spindle idle state
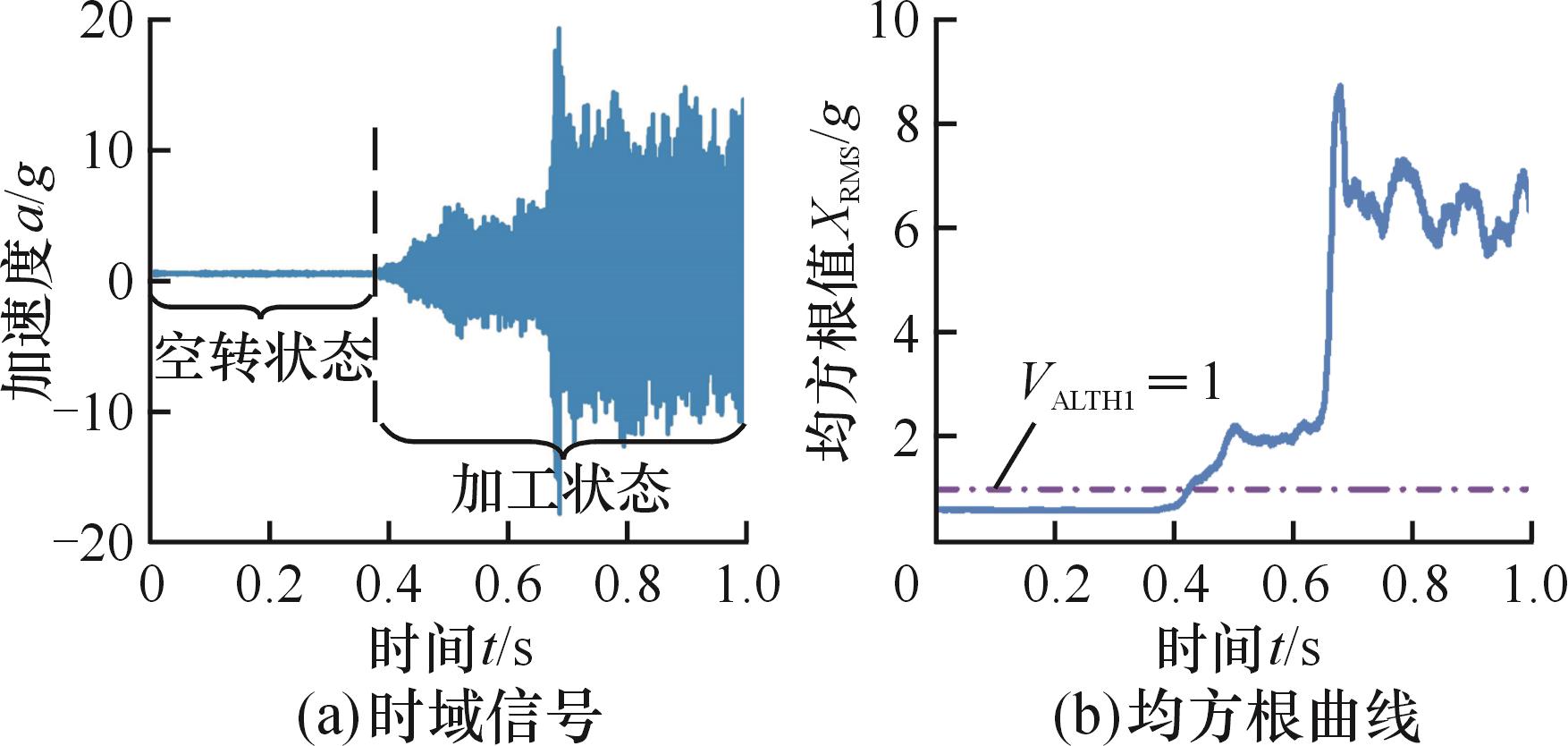
Fig.14 Root mean square value changing curve
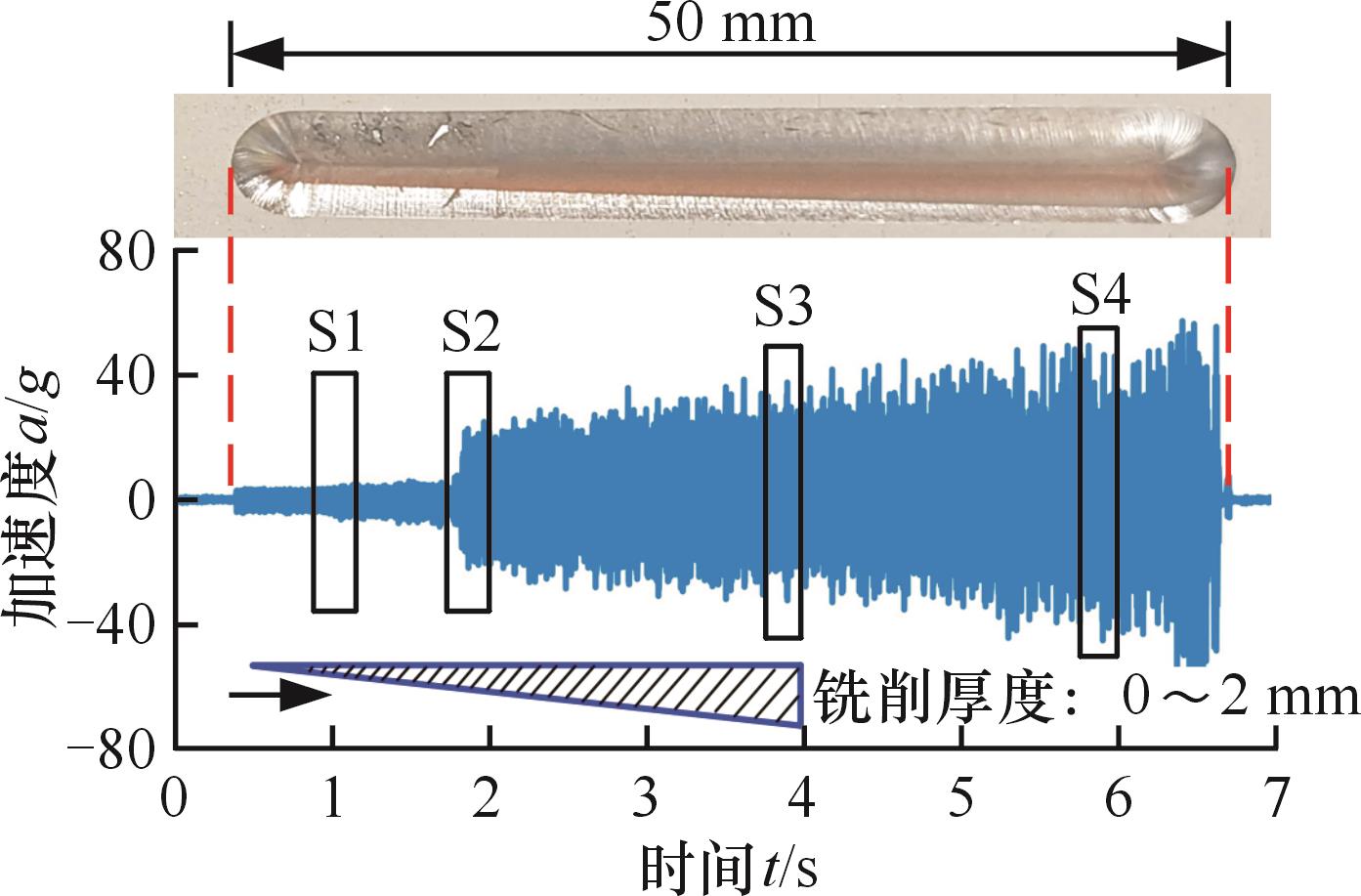
Fig.15 Variable milling depth effect diagram
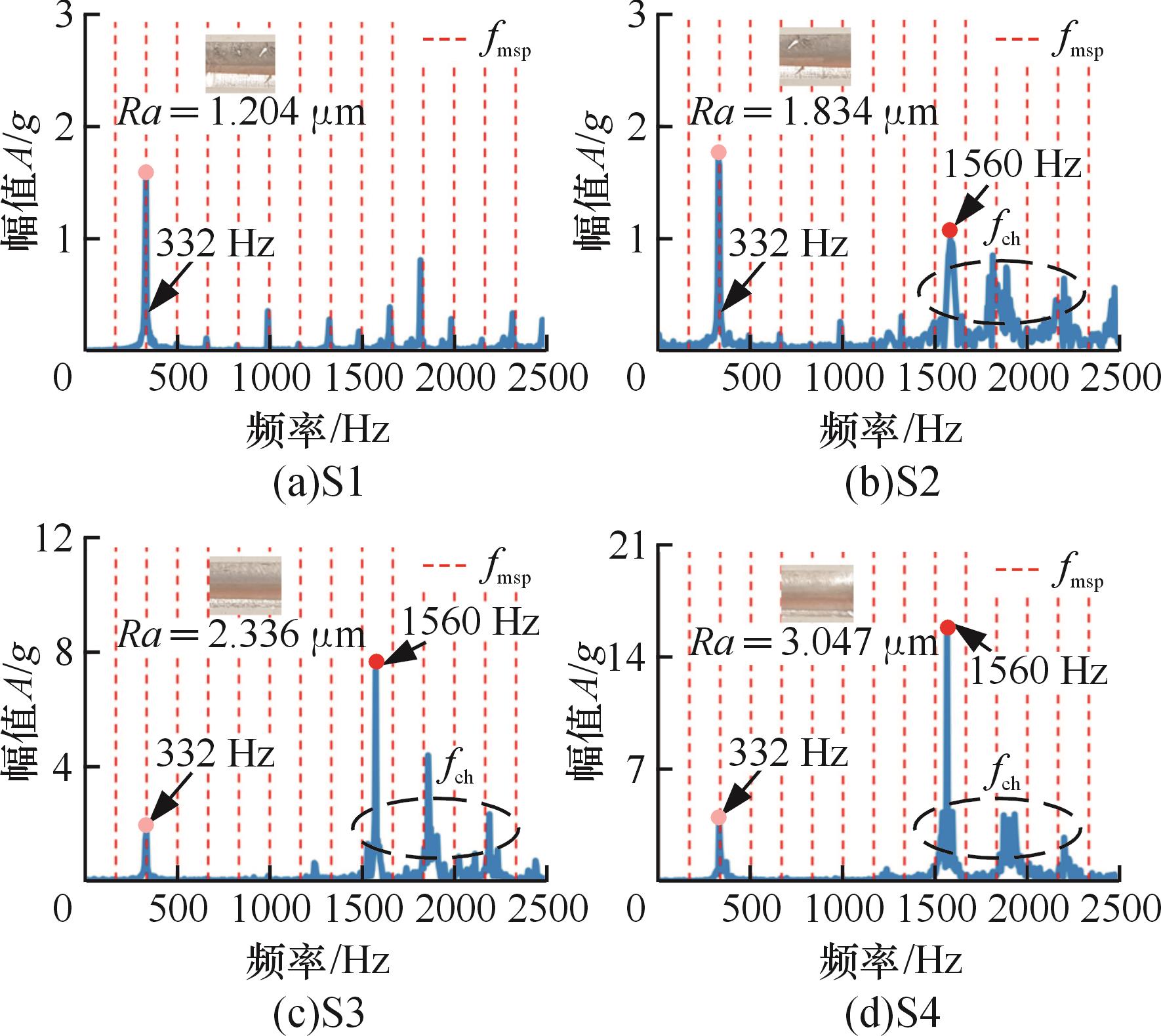
Fig.16 Frequency domain plots for different milling depths
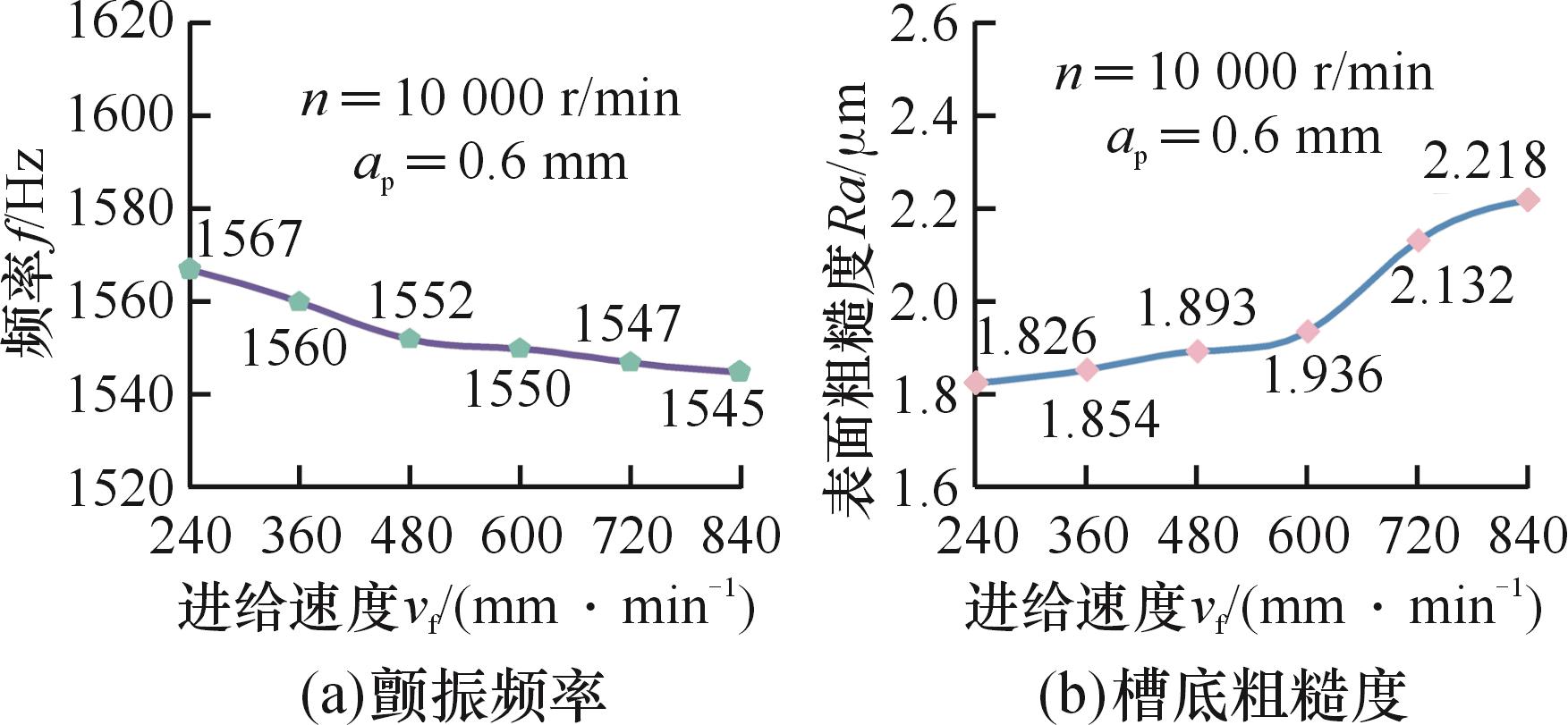
Fig.17 Plot of chattering frequency and roughness variation
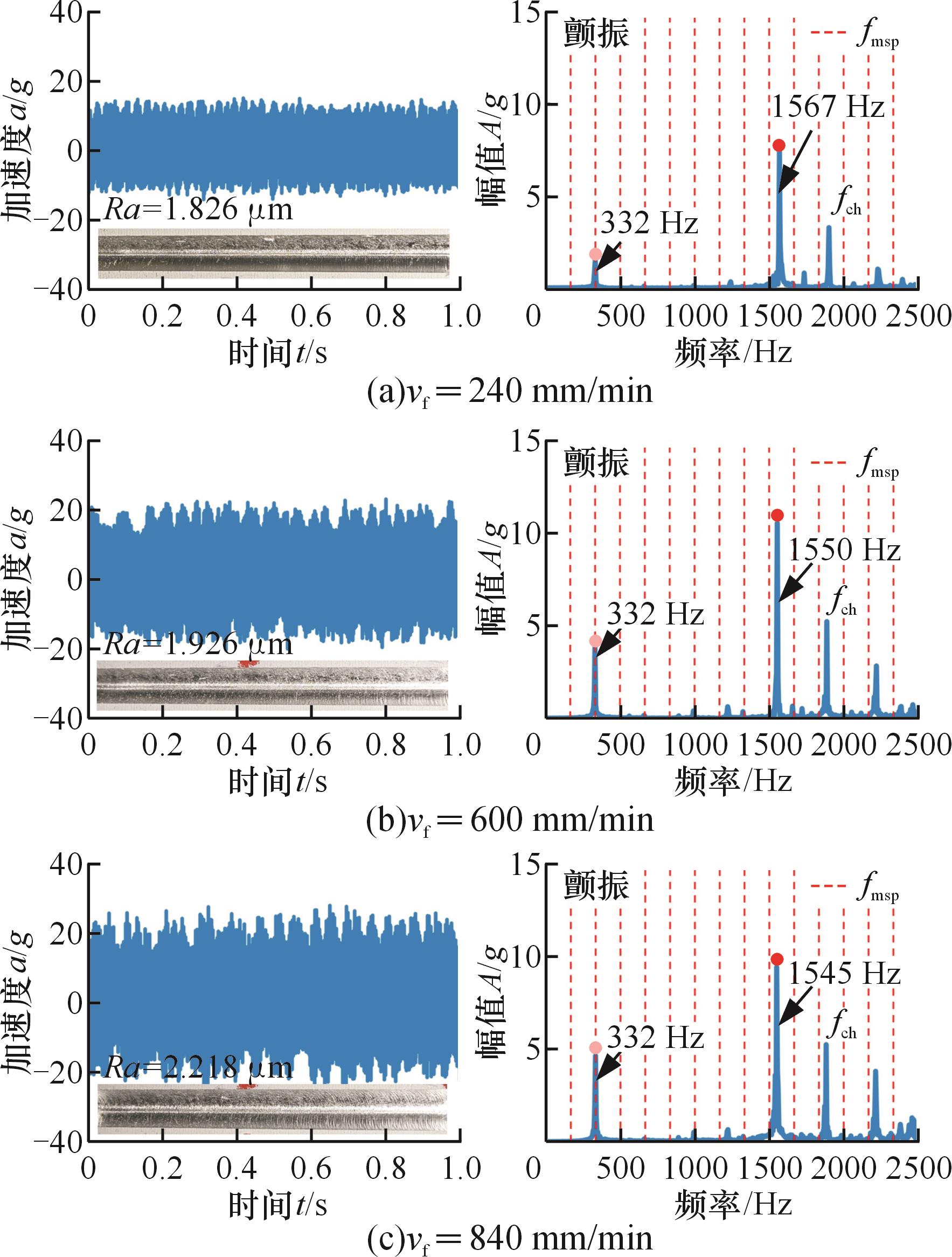
Fig.18 Time and frequency domain plots for different feed rates
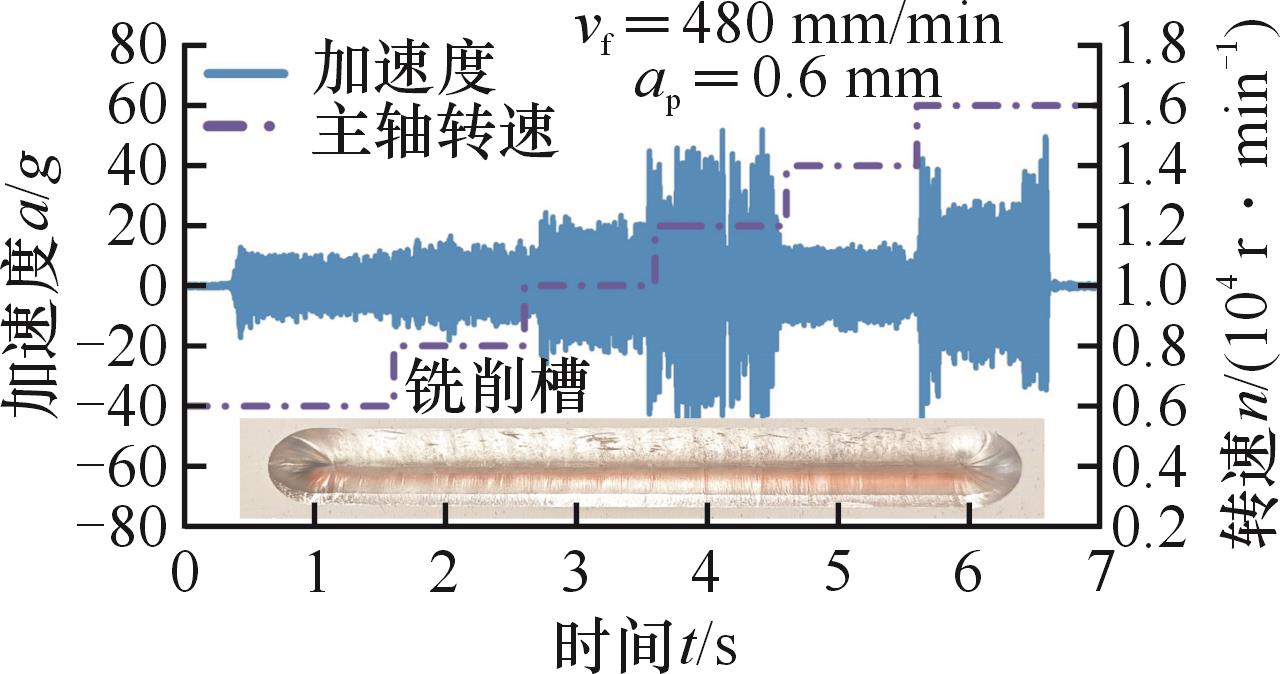
Fig.19 Time domain plot for different spindle speeds
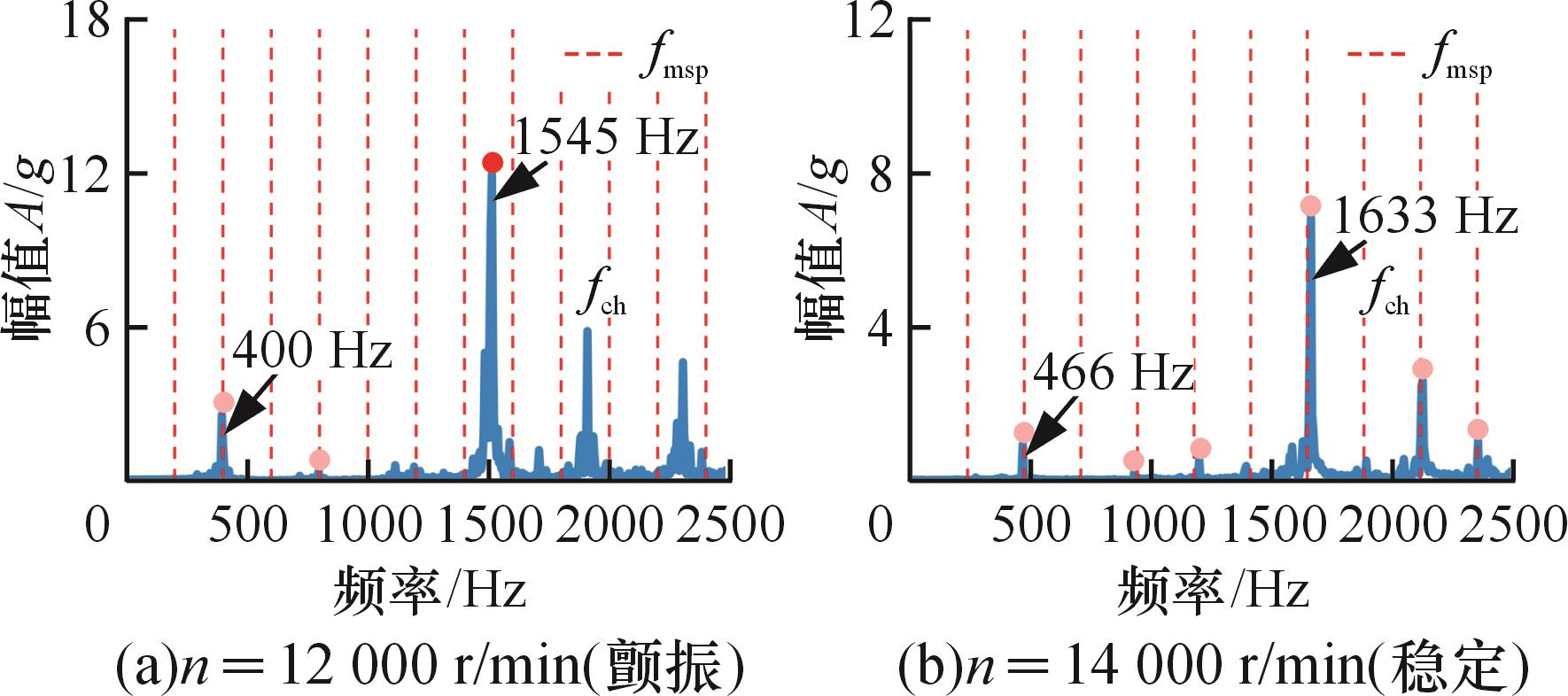
Fig.20 Frequency domain comparison of different spindle speeds
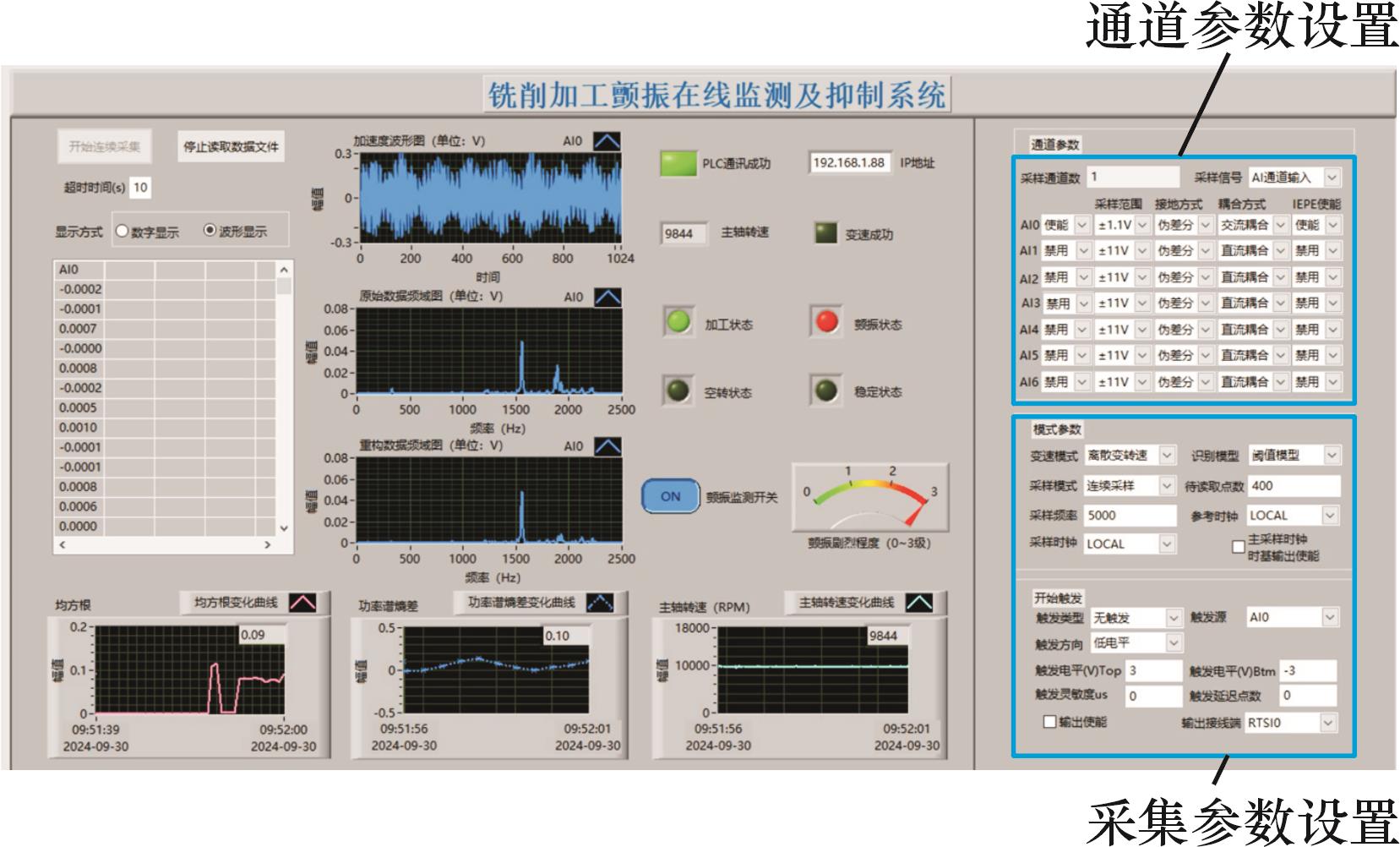
Fig.21 Main interface of chattering online monitoring and suppression system
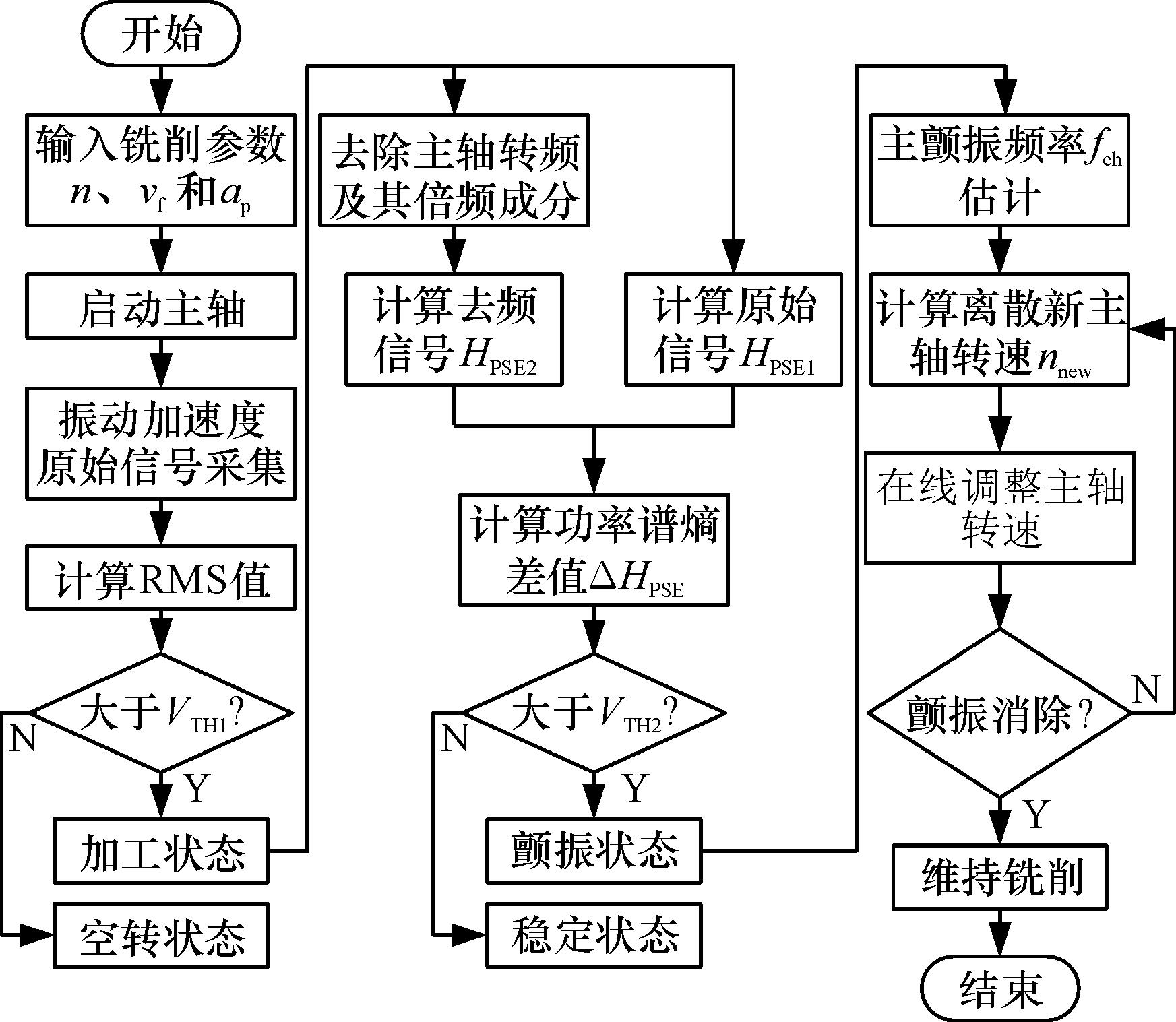
Fig.22 Flutter identification and suppression program flow
| 序号 | 铣削次数 | 转速n/ (r·min-1) | 进给vf/ (mm·min-1) | 切深ap/ mm | 准确识别次数 | 抑制后状态 |
|---|---|---|---|---|---|---|
| 1 | 3 | 8000 | 360 | 0.6 | 3 | 稳定 |
| 2 | 3 | 8000 | 480 | 0.8 | 3 | 稳定 |
| 3 | 3 | 12 000 | 360 | 0.6 | 2 | 稳定 |
| 4 | 3 | 12 000 | 480 | 0.8 | 3 | 稳定 |
| 5 | 3 | 10 000 | 360 | 0.6 | 3 | 稳定 |
| 6 | 3 | 10 000 | 480 | 0.8 | 3 | 稳定 |
Tab.3 Milling test parameters
| 序号 | 铣削次数 | 转速n/ (r·min-1) | 进给vf/ (mm·min-1) | 切深ap/ mm | 准确识别次数 | 抑制后状态 |
|---|---|---|---|---|---|---|
| 1 | 3 | 8000 | 360 | 0.6 | 3 | 稳定 |
| 2 | 3 | 8000 | 480 | 0.8 | 3 | 稳定 |
| 3 | 3 | 12 000 | 360 | 0.6 | 2 | 稳定 |
| 4 | 3 | 12 000 | 480 | 0.8 | 3 | 稳定 |
| 5 | 3 | 10 000 | 360 | 0.6 | 3 | 稳定 |
| 6 | 3 | 10 000 | 480 | 0.8 | 3 | 稳定 |
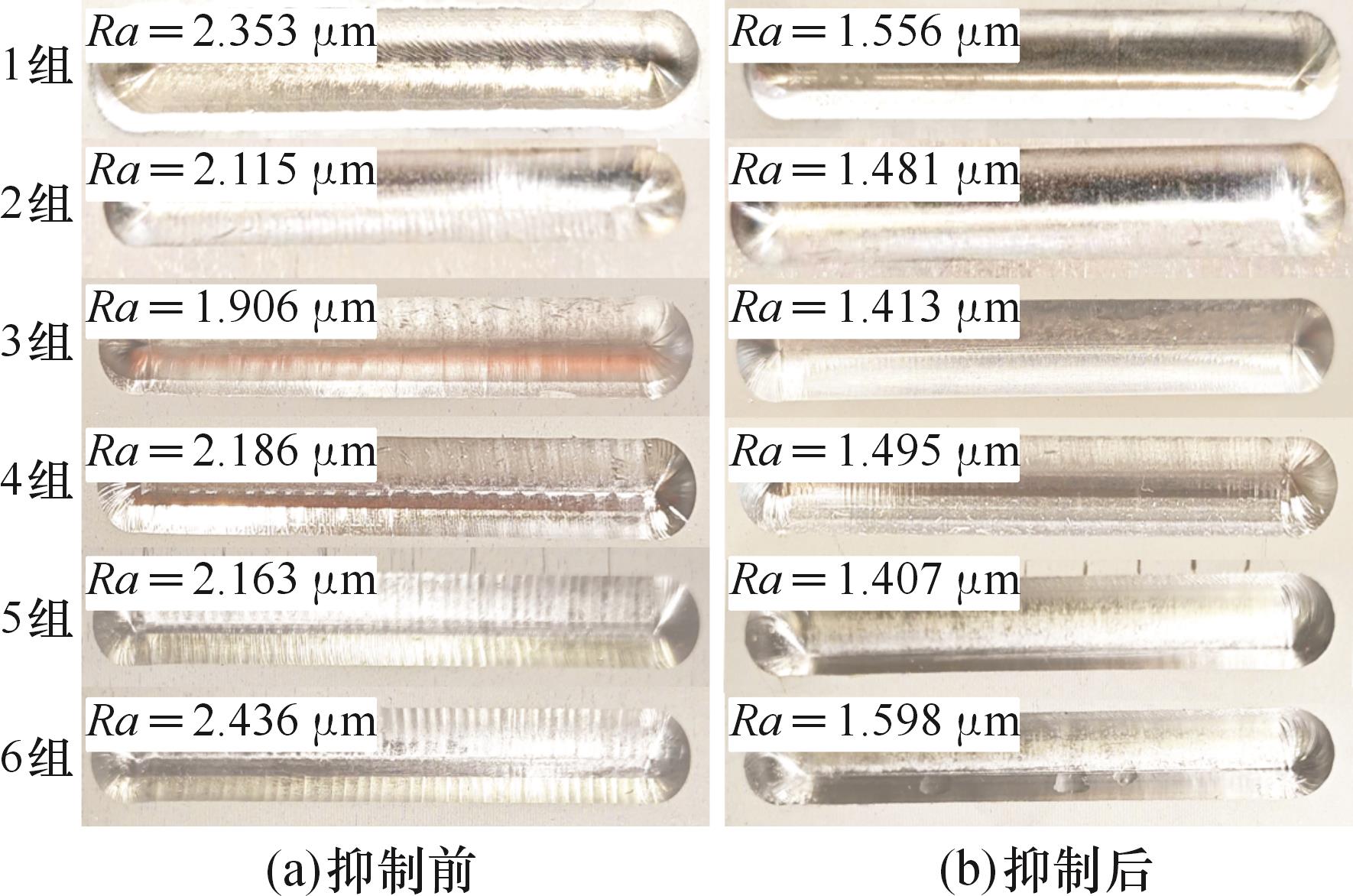
Fig.23 Comparison before and after chatter suppression of machining groove
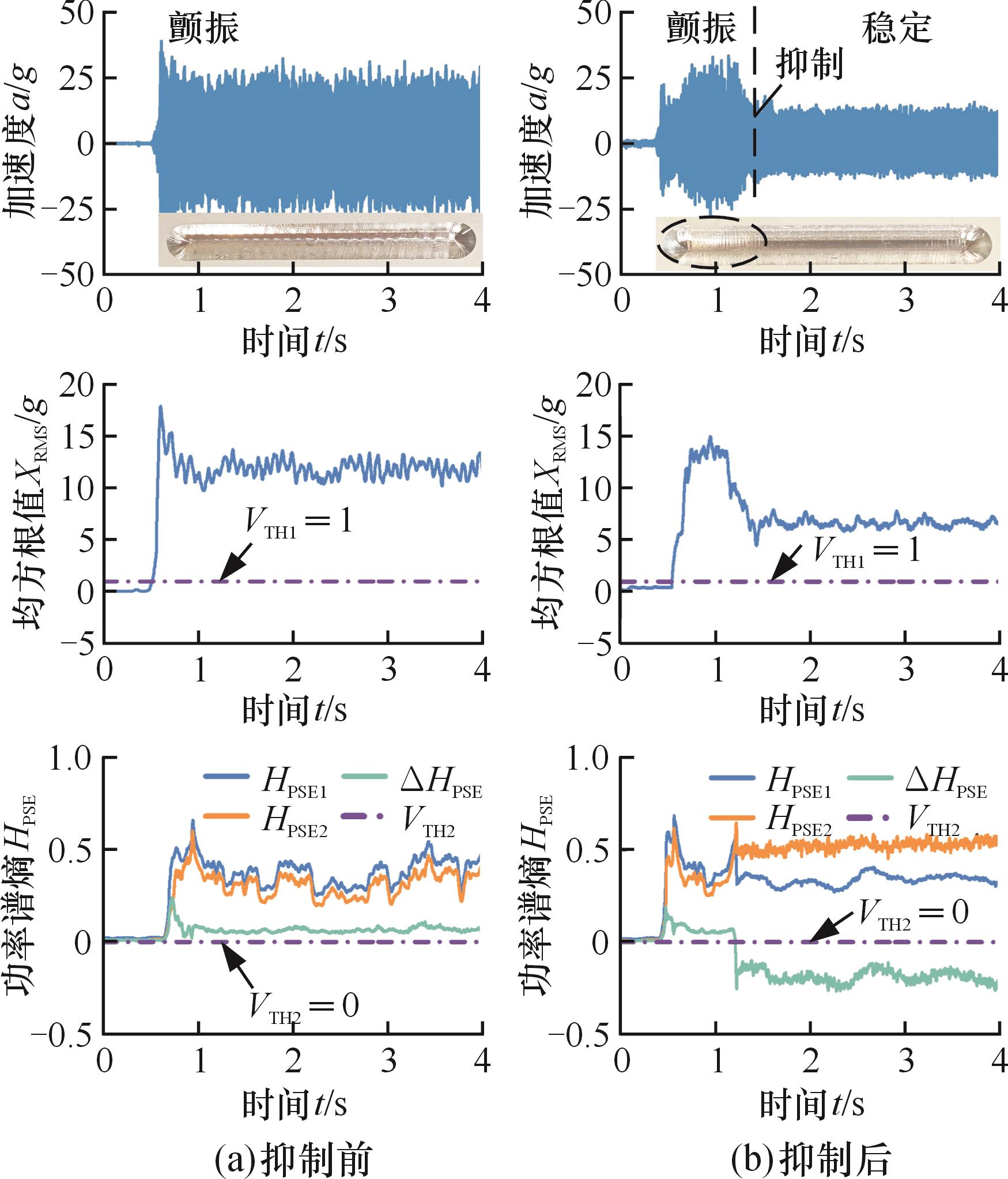
Fig.24 Signal comparison before and after chatter suppression
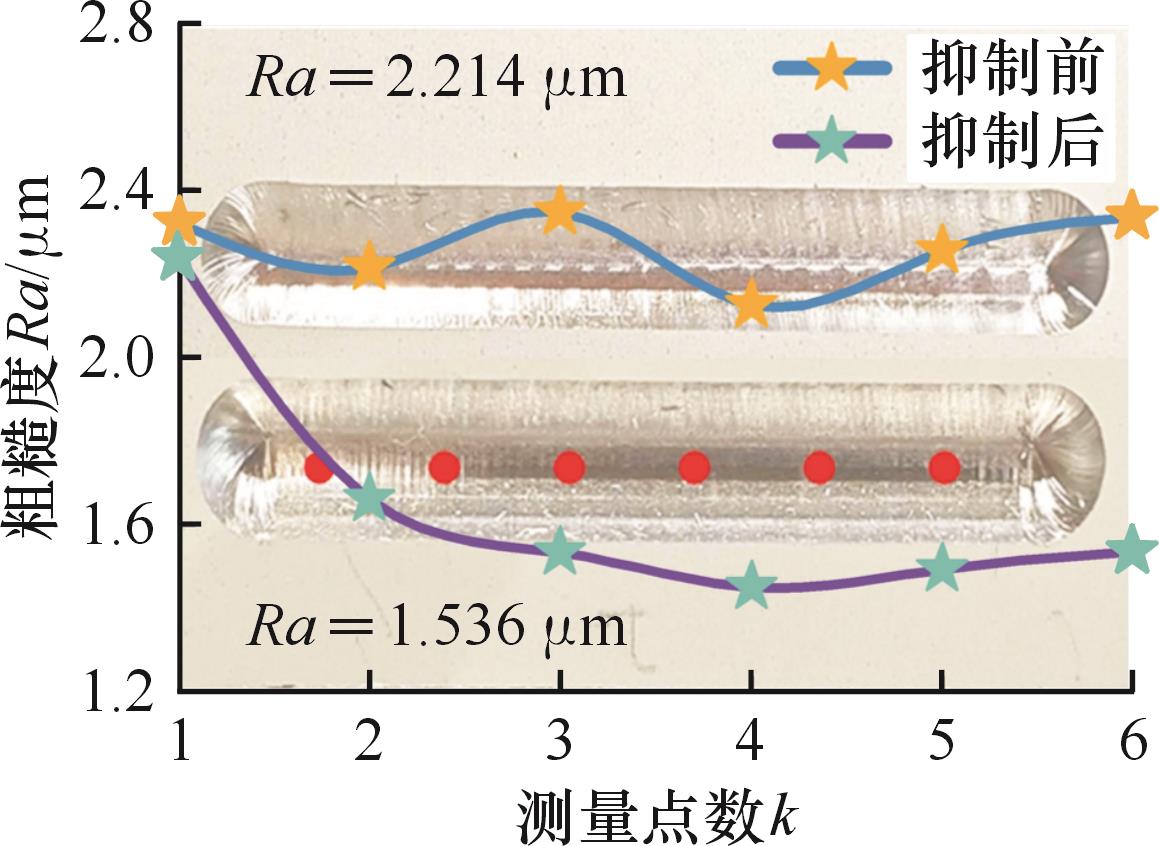
Fig.25 Roughness change before and after chatter suppression
| [1] | 岳彩旭, 张俊涛, 刘献礼, 等. 薄壁件铣削过程加工变形研究进展[J]. 航空学报, 2022, 43(4): 525164. |
| YUE Caixu, ZHANG Juntao, LIU Xianli, et al. Research Progress on Machining Deformation of Thin-walled Parts in Milling Process[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(4): 525164. | |
| [2] | 廖文和, 田威, 李波, 等. 机器人精度补偿技术与应用进展[J]. 航空学报, 2022, 43(5): 627142. |
| LIAO Wenhe, TIAN Wei, LI Bo, et al. Error Compensation Technology and Its Application Progress of an Industrial Robot[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(5): 627142. | |
| [3] | 何雨镐, 谢福贵, 刘辛军, 等. 大型构件机器人原位加工中的测量方案概述[J]. 机械工程学报, 2022, 58(14): 1-14. |
| HE Yuhao, XIE Fugui, LIU Xinjun, et al. Review on Measurement Schemes for Robotic Machining of Large Components In-situ[J]. Journal of Mechanical Engineering, 2022, 58(14): 1-14. | |
| [4] | CVITANIC T, NGUYEN V, MELKOTE S N. Pose Optimization in Robotic Machining Using Static and Dynamic Stiffness Models[J]. Robotics and Computer-Integrated Manufacturing, 2020, 66: 101992. |
| [5] | 籍永建, 姚利诚. 机器人铣削加工颤振自适应识别方法研究[J]. 中国机械工程, 2023, 34(18): 2165-2176. |
| JI Yongjian, YAO Licheng. Research on Self-adaptive Chatter Recognition Method for Robotic Milling[J]. China Mechanical Engineering, 2023, 34(18): 2165-2176. | |
| [6] | XIE Guosheng, XU Yang, XU Penghong, et al. Chatter Stability Analysis of a Six-axis Milling Robot[J]. The International Journal of Advanced Manufacturing Technology, 2023, 125(7): 3551-3561. |
| [7] | 杨靖, 张小俭, 吴毅, 等. 基于刚度定向的工业机器人铣削姿态优化研究[J]. 中国机械工程, 2022, 33(16): 1957-1964. |
| YANG Jing, ZHANG Xiaojian, WU Yi, et al. Posture Optimization Based on Stiffness Orientation Method for Industrial Robotic Milling[J]. China Mechanical Engineering, 2022, 33(16): 1957-1964. | |
| [8] | WANG Ruoqi, SUN Yuwen. Chatter Prediction for Parallel Mirror Milling of Thin-walled Parts by Dual-robot Collaborative Machining System[J]. Robotics and Computer-Integrated Manufacturing, 2024, 88: 102715. |
| [9] | 李超, 张俊, 田辉, 等. 综合振动信号能量比和幅值标准差的铣削颤振实时监测方法[J]. 机械工程学报, 2024, 60(14): 11-23. |
| LI Chao, ZHANG Jun, TIAN Hui, et al. Timely Chatter Detecting Method in Milling with Integrated Energy Ratio and Amplitude Standard Deviation of Vibration Signal[J]. Journal of Mechanical Engineering, 2024, 60(14): 11-23. | |
| [10] | LAMRAOUI M, BARAKAT M, THOMAS M, et al. Chatter Detection in Milling Machines by Neural Network Classification and Feature Selection[J]. Journal of Vibration and Control, 2015, 21(7): 1251-1266. |
| [11] | CHEN Ding, ZHANG Xiaojian, ZHAO Huan, et al. Development of a Novel Online Chatter Monitoring System for Flexible Milling Process[J]. Mechanical Systems and Signal Processing, 2021, 159: 107799. |
| [12] | ZHENG Qingzhen, CHEN Guangsheng, JIAO Anling. Chatter Detection in Milling Process Based on the Combination of Wavelet Packet Transform and PSO-SVM[J]. The International Journal of Advanced Manufacturing Technology, 2022, 120(1): 1237-1251. |
| [13] | JI Yongjian, WANG Xibin, LIU Zhibing, et al. Early Milling Chatter Identification by Improved Empirical Mode Decomposition and Multi-indicator Synthetic Evaluation[J]. Journal of Sound and Vibration, 2018, 433: 138-159. |
| [14] | LI Xiaohu, WAN Shaoke, HUANG Xiaowei, et al. Milling Chatter Detection Based on VMD and Difference of Power Spectral Entropy[J]. The International Journal of Advanced Manufacturing Technology, 2020, 111(7): 2051-2063. |
| [15] | LI Zhenmin, SONG Qinghua, JIN Peijian, et al. Chatter Suppression Techniques in Milling Processes: a State of the Art Review[J]. Chinese Journal of Aeronautics, 2024, 37(7): 1-23. |
| [16] | YANG Yiqing, WANG Yunfei, LIU Qiang. Design of a Milling Cutter with Large Length–Diameter Ratio Based on Embedded Passive Damper[J]. Journal of Vibration and Control, 2019, 25(3): 506-516. |
| [17] | LI Denghui, CAO Hongrui, CHEN Xuefeng. Fuzzy Control of Milling Chatter with Piezoelectric Actuators Embedded to the Tool Holder[J]. Mechanical Systems and Signal Processing, 2021, 148: 107190. |
| [18] | LI Zhenmin, SONG Qinghua, LIU Zhanqiang, et al. Chatter Suppression Mechanism and Parameters Configuration of the Spindle Speed Variation with Piecewise Characteristics[J]. The International Journal of Advanced Manufacturing Technology, 2022, 122(7): 3041-3055. |
| [19] | 刘阔, 姜业明, 黄任杰, 等. 虑及颤振在线抑制的机床高效自适应加工技术研究[J]. 机械工程学报, 2024, 60(6): 104-113. |
| LIU Kuo, JIANG Yeming, HUANG Renjie, et al. Research on High-efficiency Adaptive Machining Technology of Machine Tools Considering Online Chatter Suppression[J]. Journal of Mechanical Engineering, 2024, 60(6): 104-113. | |
| [20] | LI Fei, LIU Jun, HU Baoquan. Chatter Suppression in the Milling Process of Thin-walled Components with Continuous Sinusoidal Spindle Speed Variation[J]. International Journal of Precision Engineering and Manufacturing-Green Technology, 2025, 12(4): 1233-1246. |
| [21] | DENG Kenan, YANG Lijun, LU Yong, et al. Multitype Chatter Detection via Multichannelinternal and External Signals in Robotic Milling[J]. Measurement, 2024, 229: 114417. |
| [22] | SMITH S, TLUSTY J. Stabilizing Chatter by Automatic Spindle Speed Regulation[J]. CIRP Annals, 1992, 41(1): 433-436. |
| [1] | LIANG Zhiqiang1, 2, CHEN Sichen1, DU Yuchao1, LIU Baolong1, 2, GAO Zirui1, YUE Yi3, XIAO Yubin4, ZHENG Haoran1, QIU Tianyang1, LIU Zhibing1. Chatter Identification Method for Heavy-duty Robotic Milling Systems Based on Variational Mode Filtering and Attention Mechanism [J]. China Mechanical Engineering, 2025, 36(05): 1018-1027,1073. |
| [2] | SHI Long, ZHOU Hexiang, LI Zhoulong. Depth of Cut Control for Thin-walled Parts in Robotic Milling Based on FLADRC [J]. China Mechanical Engineering, 2025, 36(04): 671-680. |
| [3] | JI Yongjian, YAO Licheng, . Research on Self-adaptive Chatter Recognition Method for Robotic Milling [J]. China Mechanical Engineering, 2023, 34(18): 2165-2176. |
| [4] | YANG Jing, ZHANG Xiaojian, WU YiYE Songtao, YAN Sijie, LU Jialin. Posture Optimization Based on Stiffness Orientation Method for Industrial Robotic Milling [J]. China Mechanical Engineering, 2022, 33(16): 1957-1964. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||