


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (11): 2563-2573.DOI: 10.3969/j.issn.1004-132X.2025.11.011
魏琼, 白林勇, 陈子超, 张道德, 李奕( )
)
收稿日期:2024-06-02
出版日期:2025-11-25
发布日期:2025-12-09
通讯作者:
李奕
作者简介:魏琼,女,1980年生,副教授。研究方向为流体传动控制、机电伺服系统设计。E-mail:20140058@hbut,edu.cn。
基金资助:
Qiong WEI, Linyong BAI, Zichao CHEN, Daode ZHANG, Yi LI()
Received:2024-06-02
Online:2025-11-25
Published:2025-12-09
Contact:
Yi LI
摘要:
外部不确定扰动与摩擦是影响气动摆角伺服系统控制性能的重要因素(分别引起局部波动与爬行现象)。提出了一种基于扰动观测和摩擦补偿的滑模控制策略,设计一种引入类双曲正切函数和角速度误差项的改进扩张状态观测器对外部不确定扰动进行观测,以提高系统抗扰能力。由于观测器不能有效地观测系统摩擦的静-动高阶突变,导致爬行现象不能有效改善,因此对摩擦力矩进行辨识以弥补观测不足。最后,针对系统存在鲁棒性较差的问题,设计一种非奇异快速滑模控制器,利用含积分特性的超螺旋算法平滑控制量来改善滑模控制中的固有抖振问题,并将扰动观测值和摩擦力矩辨识值进行反馈补偿。仿真与实验结果表明,与4种控制策略相比,所设计的控制方法有效增强了系统的抗扰能力,并提高了气动摆角伺服系统轨迹跟踪性能。
中图分类号:
魏琼, 白林勇, 陈子超, 张道德, 李奕. 基于扰动观测和摩擦补偿的气动摆角伺服系统滑模控制[J]. 中国机械工程, 2025, 36(11): 2563-2573.
Qiong WEI, Linyong BAI, Zichao CHEN, Daode ZHANG, Yi LI. Sliding Mode Control for Pneumatic Swing Angle Servo Systems Based on Disturbance Observation and Friction Compensation[J]. China Mechanical Engineering, 2025, 36(11): 2563-2573.
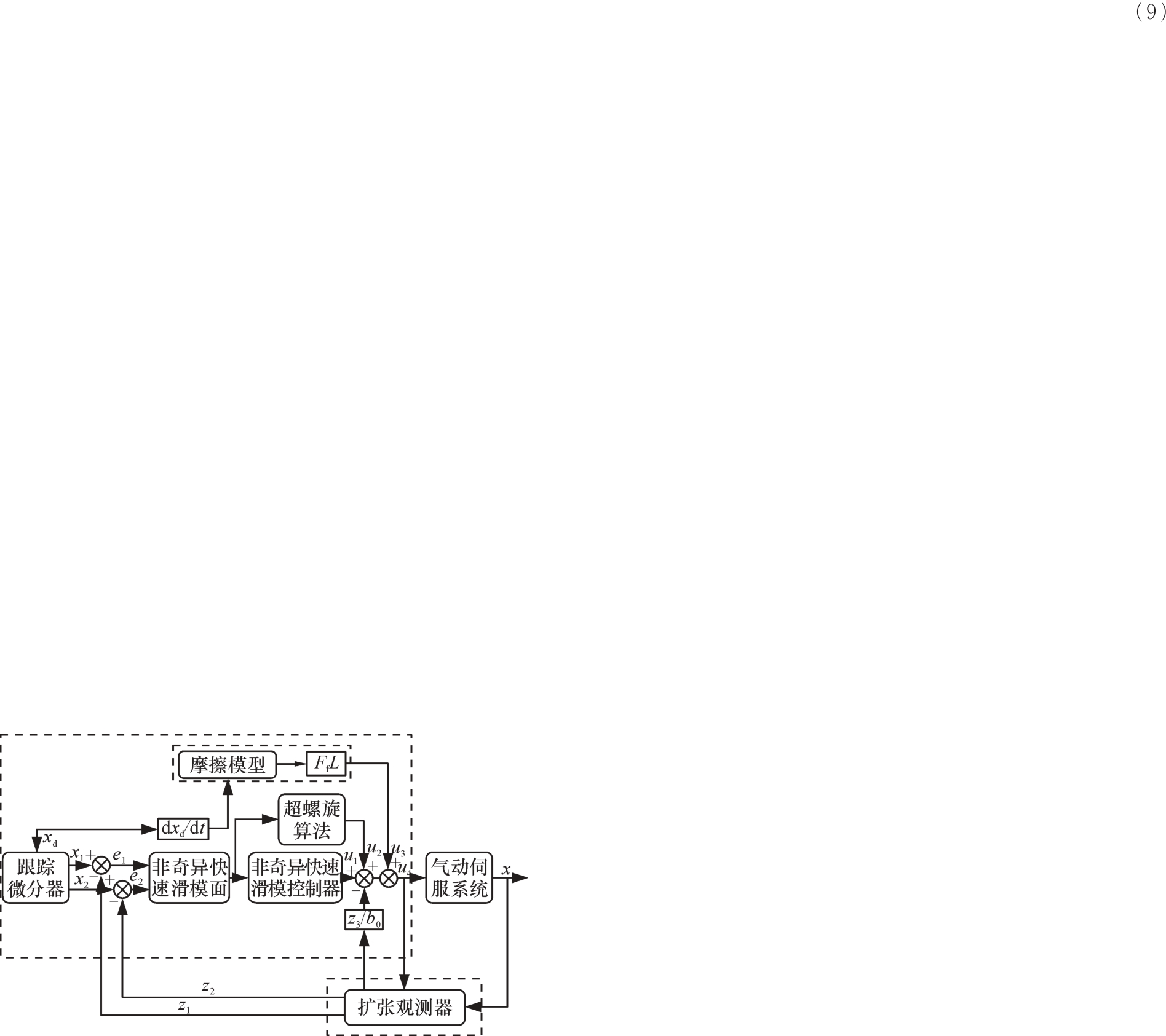
图1 基于扰动观测和摩擦补偿的非奇异快速滑模控制框图
Fig.1 Block diagram of non-singular fast sliding mode control based on disturbance observation and friction compensation
| 参数 | 辨识值 |
|---|---|
| 0.18 | |
| 0.22 | |
| 0.05 | |
| 18.1 | |
| 0.48 | |
| 0.008 |
表1 摩擦模型参数
Tab.1 Friction model parameters
| 参数 | 辨识值 |
|---|---|
| 0.18 | |
| 0.22 | |
| 0.05 | |
| 18.1 | |
| 0.48 | |
| 0.008 |
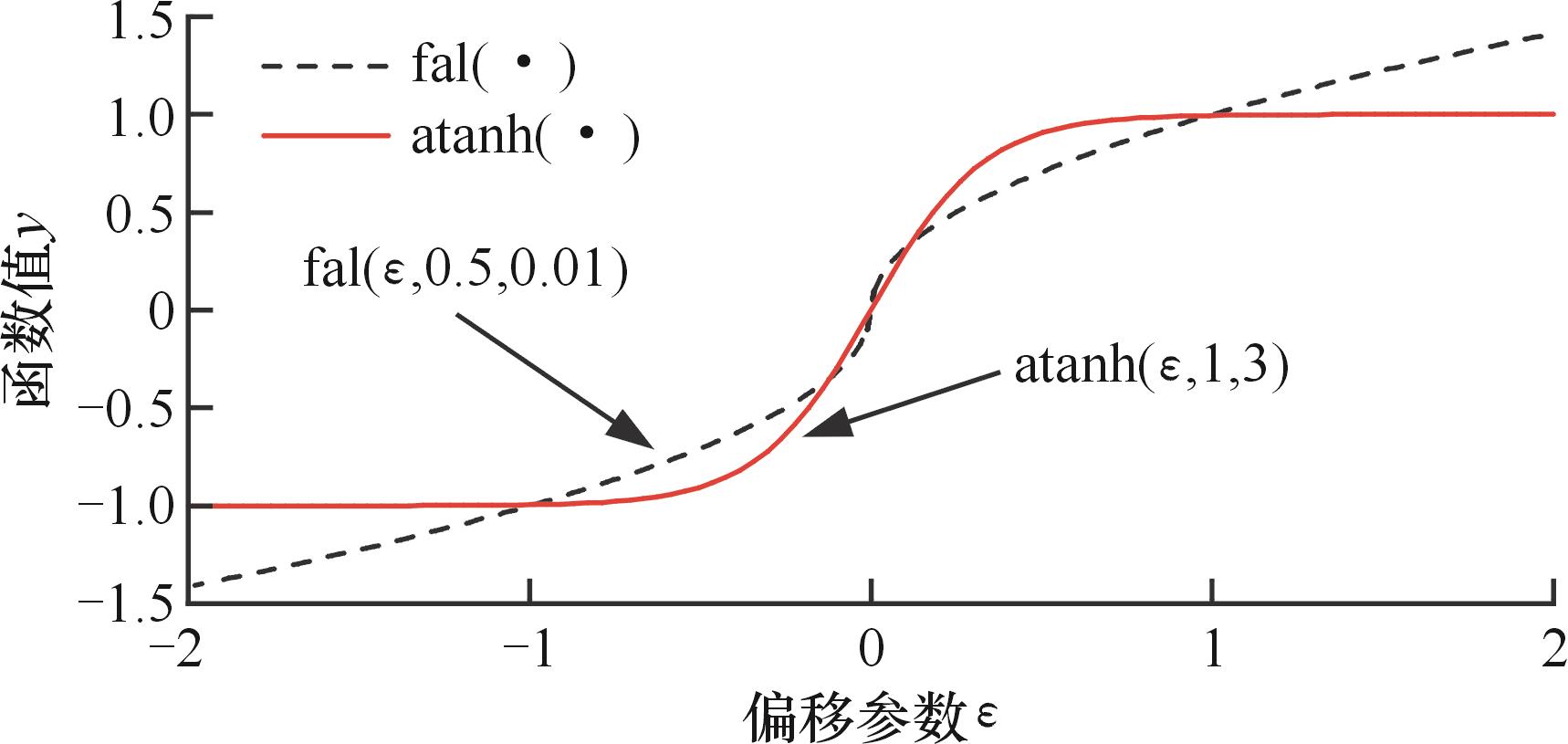
图2 饱和函数曲线对比
Fig.2 Comparison of saturation function curves
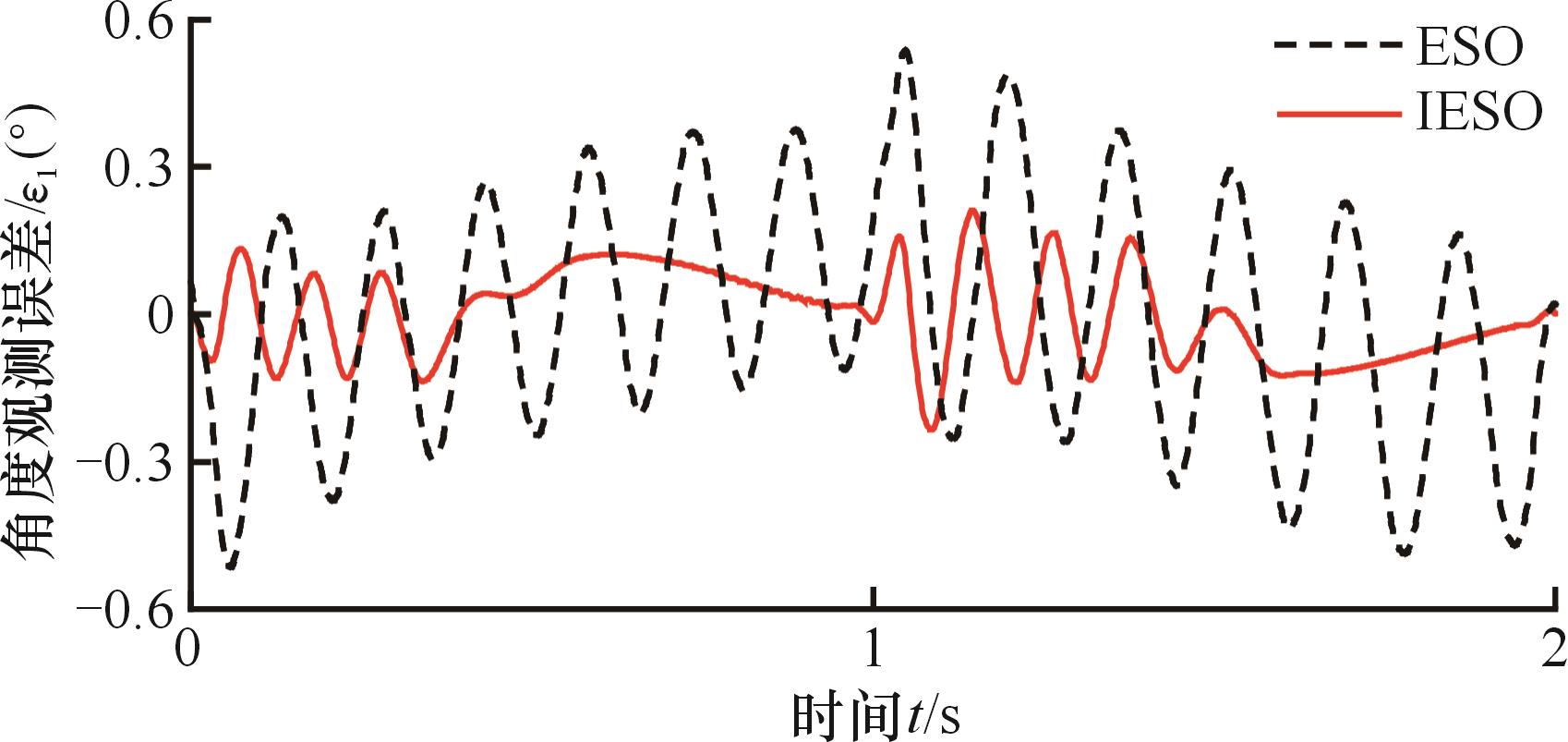
图3 角度项观测误差
Fig.3 Observation error of angular terms
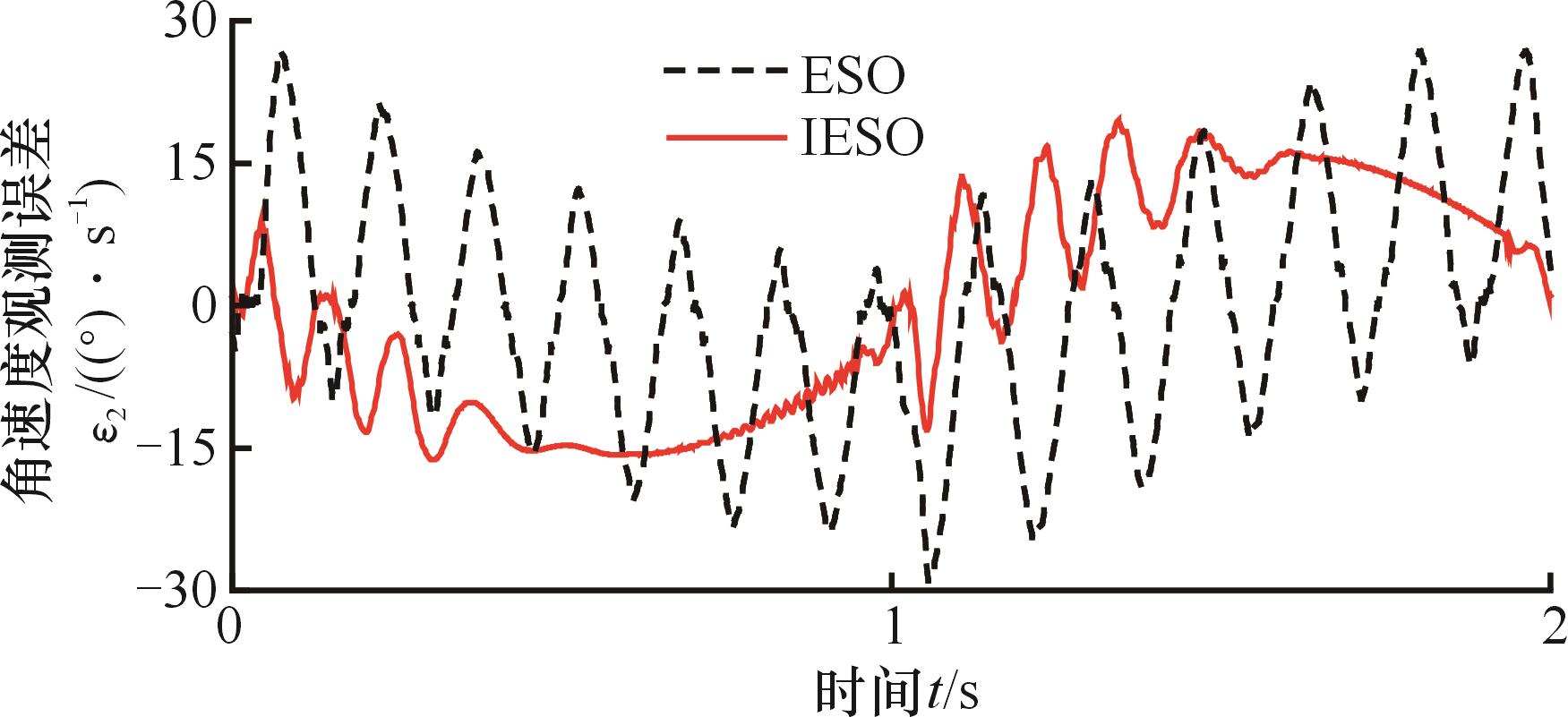
图4 角速度项观测误差
Fig.4 Observation error of angular velocity terms
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 150 | 1 | ||
| 100 | 15 | ||
| 300 | 13 | ||
| 800 | 1.9 | ||
| 9.5 | 1.85 | ||
| 3 | 2 | ||
| 1 | 3 |
表2 主要仿真参数
Tab.2 Main simulation parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 150 | 1 | ||
| 100 | 15 | ||
| 300 | 13 | ||
| 800 | 1.9 | ||
| 9.5 | 1.85 | ||
| 3 | 2 | ||
| 1 | 3 |
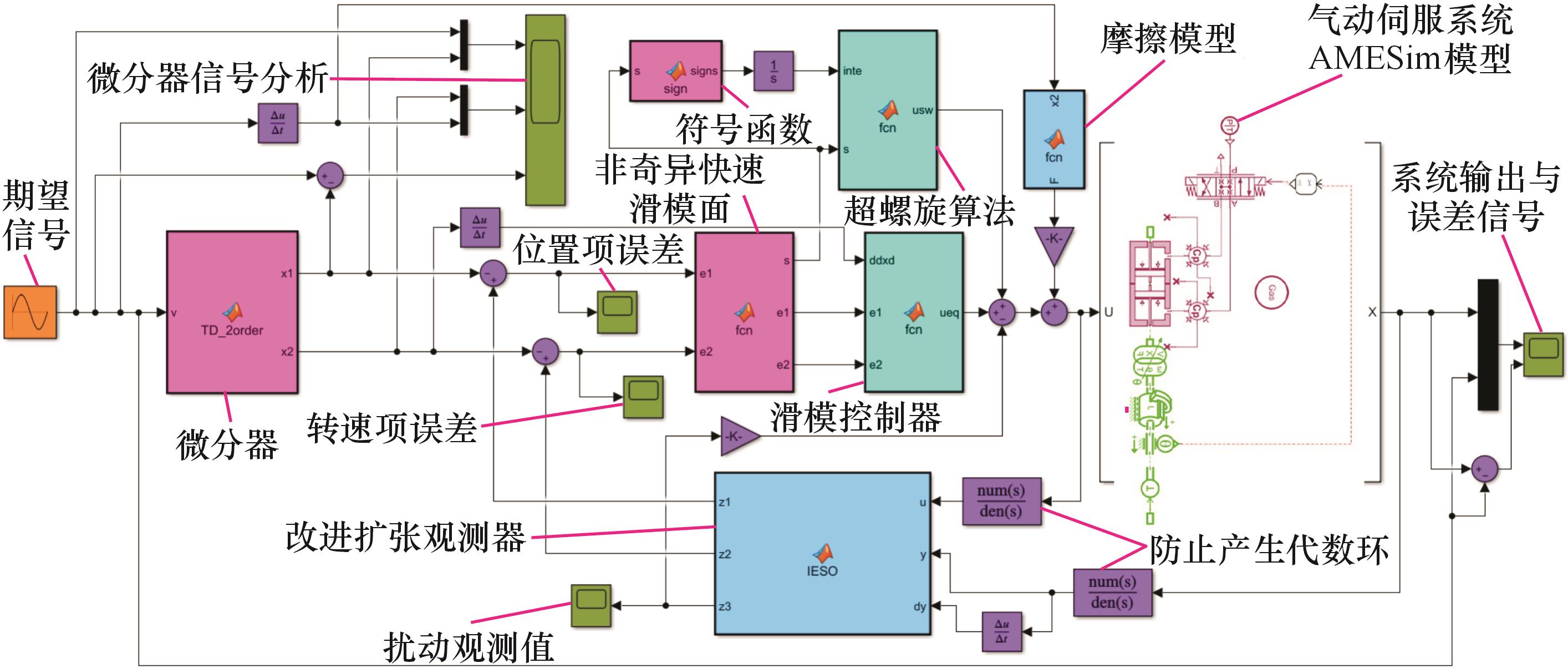
图5 联合仿真模型
Fig.5 Co-simulation model
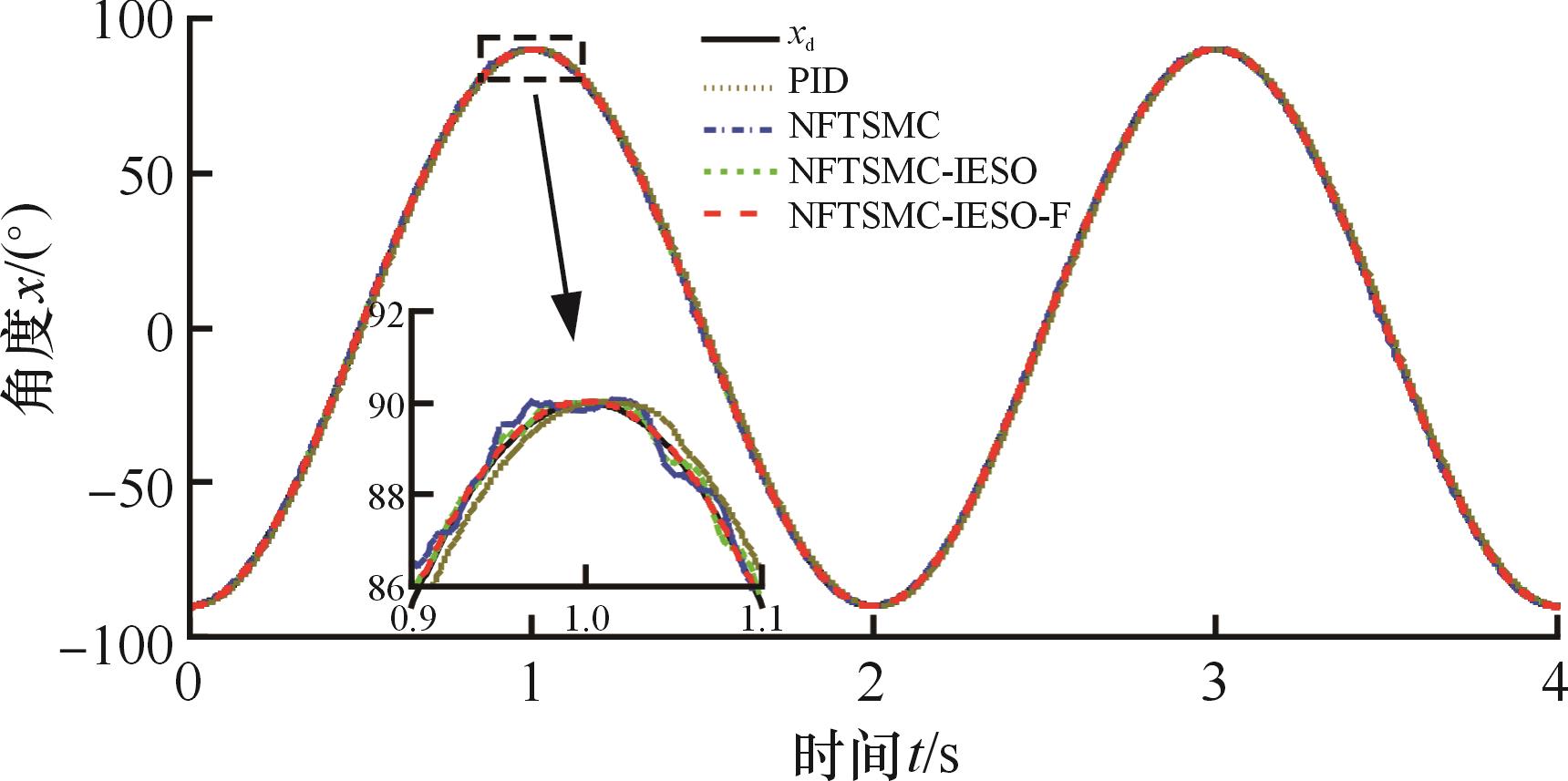
图6 0.5 Hz下轨迹跟踪仿真曲线
Fig.6 Trajectory tracking simulation curve at 0.5 Hz
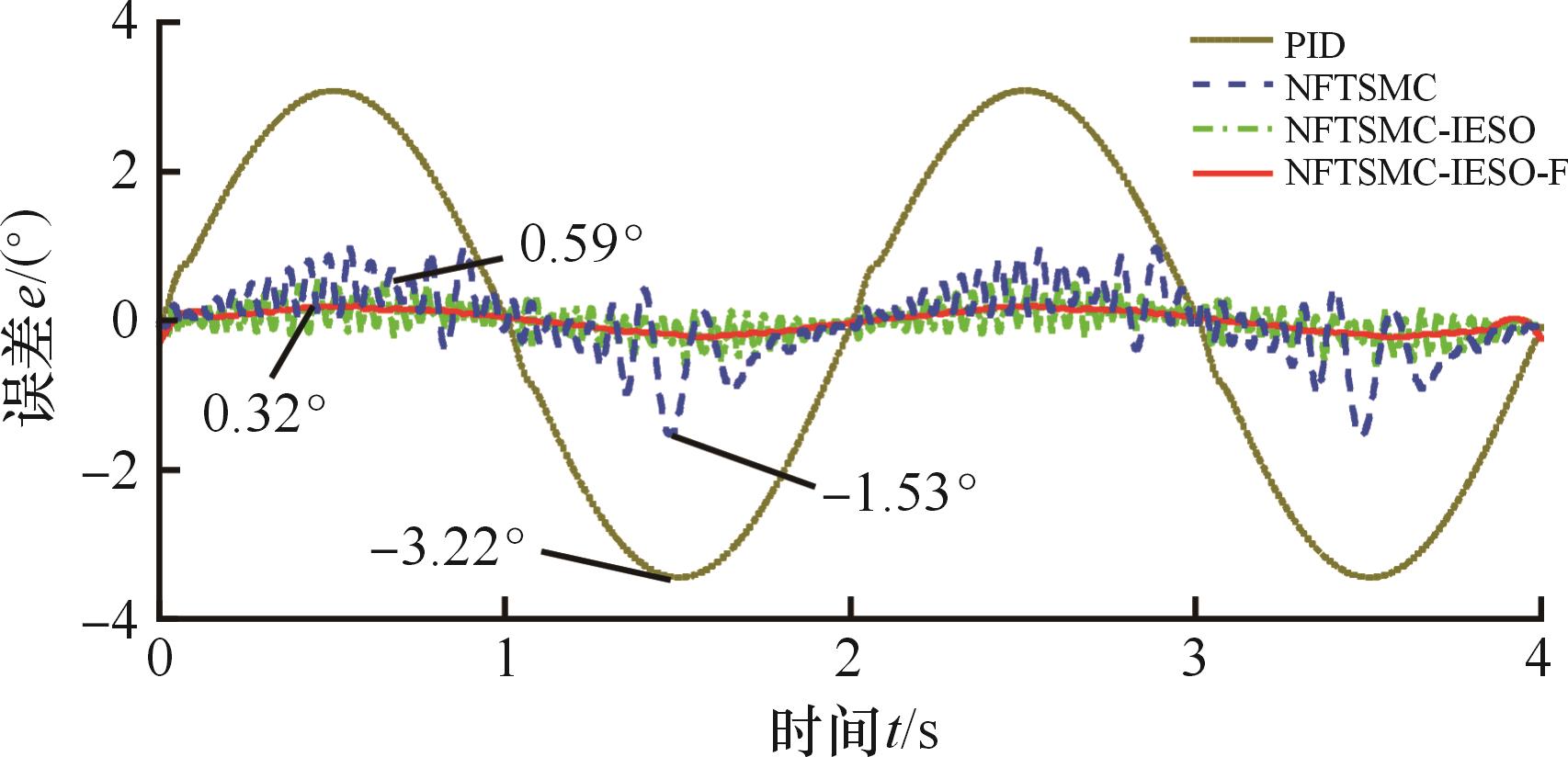
图7 0.5 Hz下轨迹跟踪仿真误差曲线
Fig.7 Trajectory tracking simulation error curve at 0.5 Hz
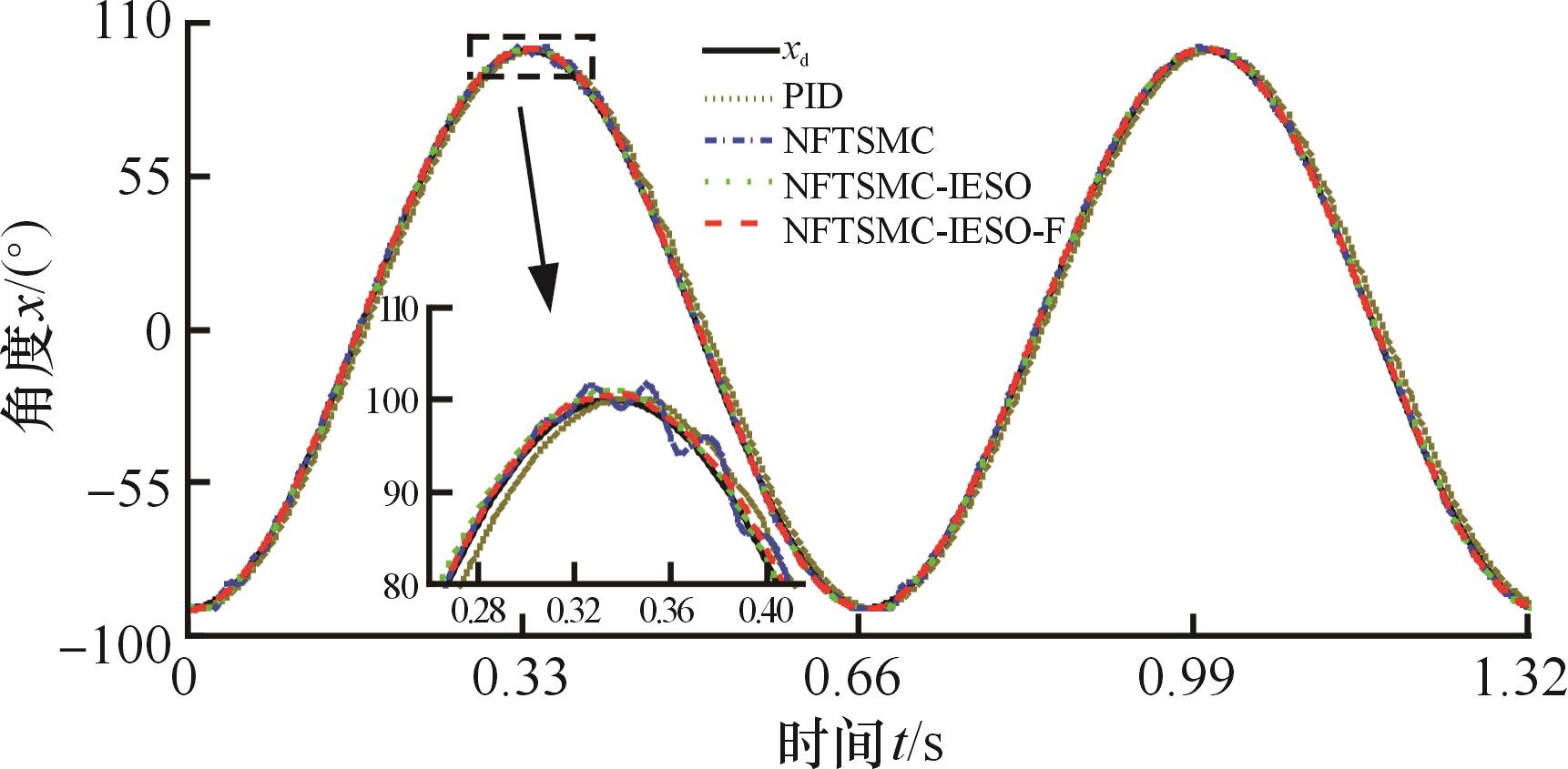
图8 1.5 Hz下轨迹跟踪仿真曲线
Fig.8 Trajectory tracking simulation curve at 1.5 Hz
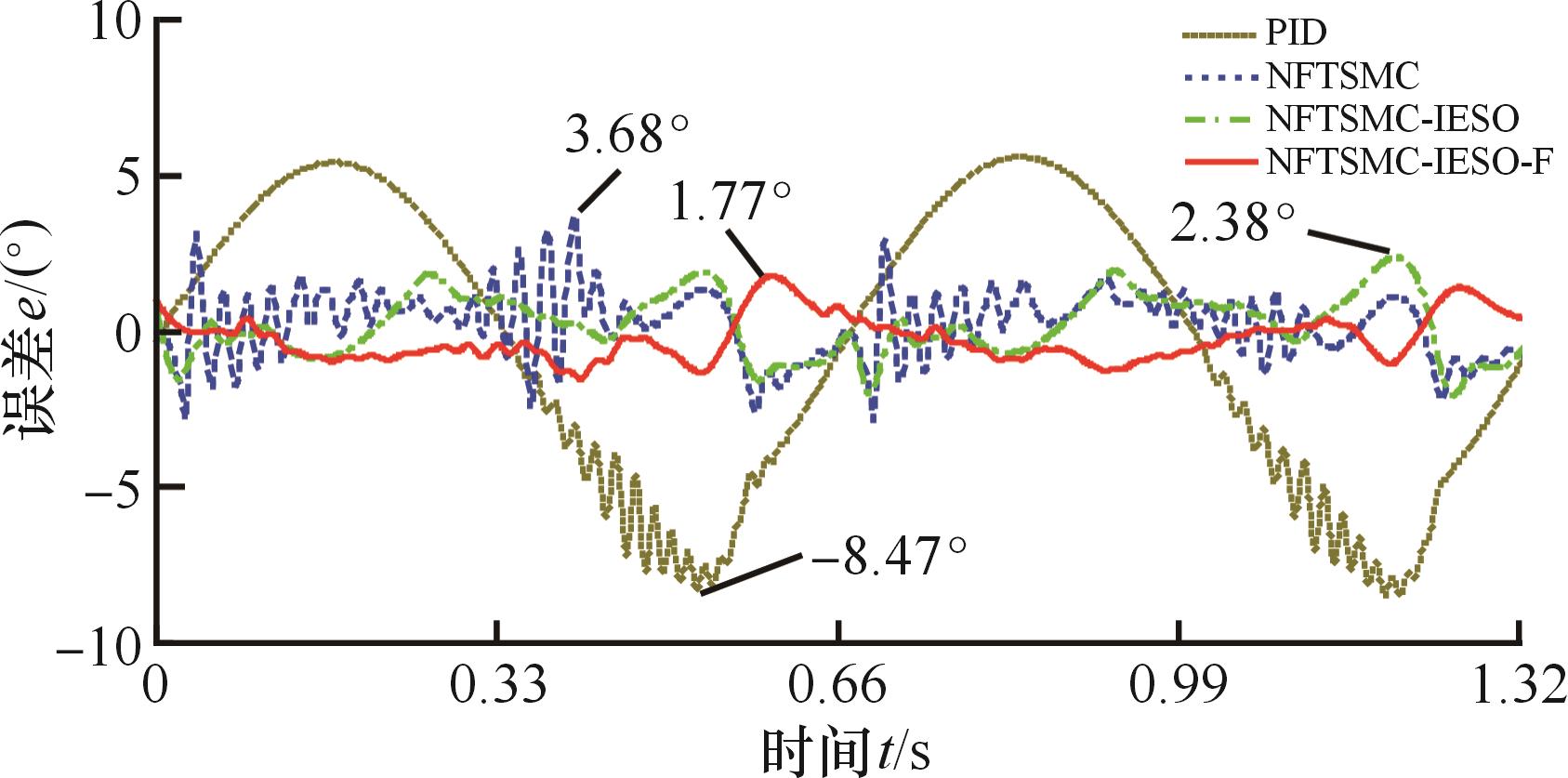
图9 1.5 Hz下轨迹跟踪仿真误差曲线
Fig.9 Trajectory tracking simulation error curve at 1.5 Hz
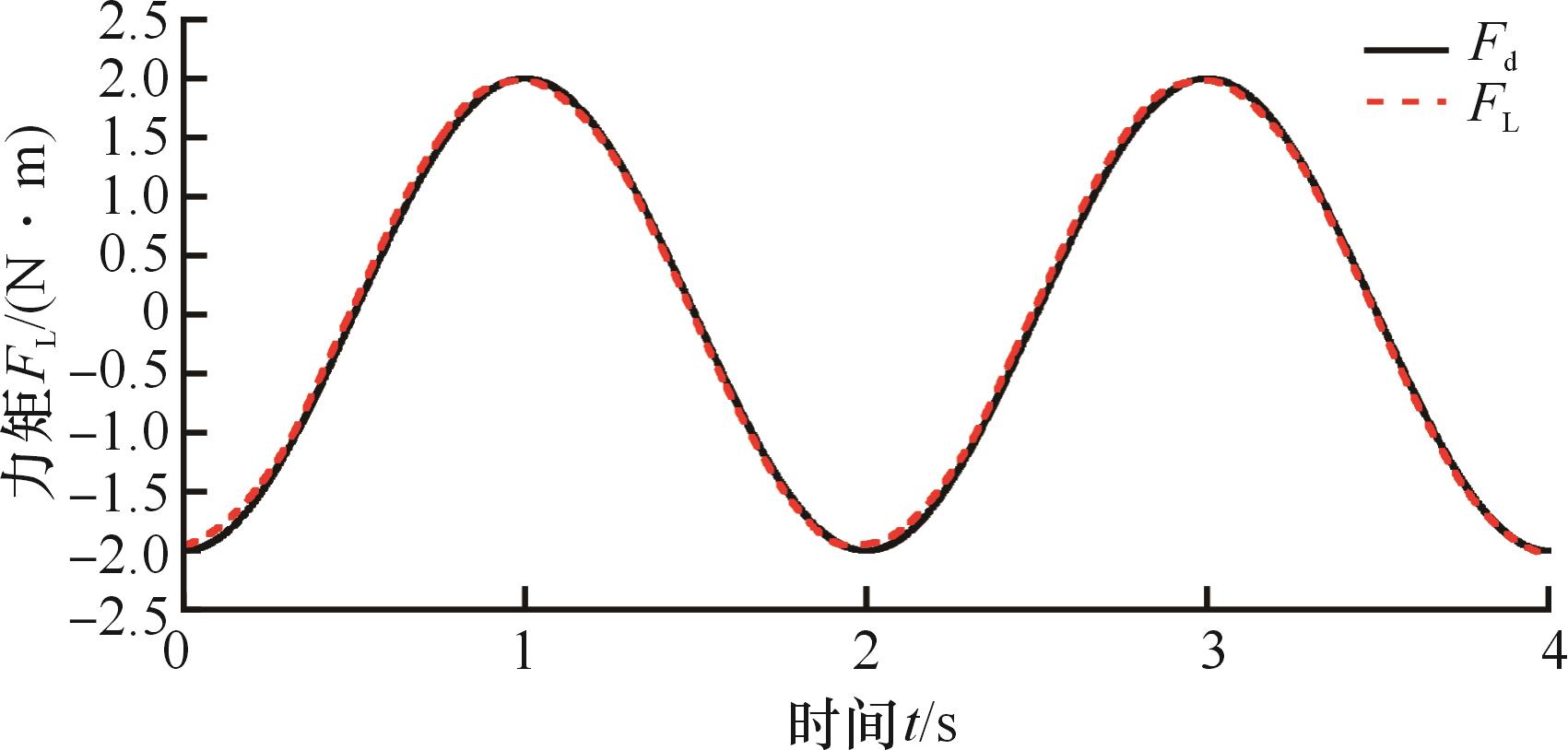
图10 负载力矩响应仿真曲线
Fig.10 Load torque response simulation curve
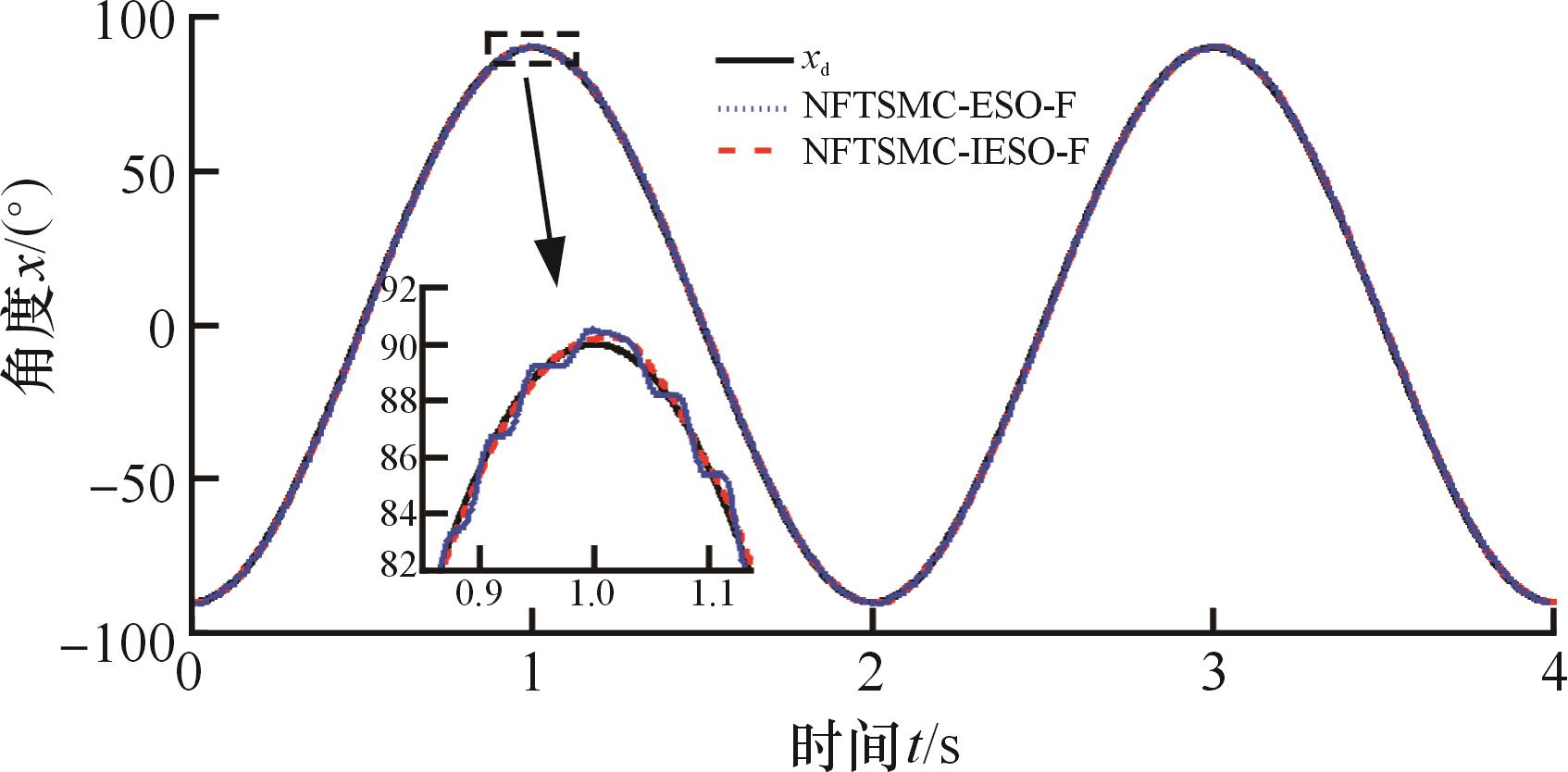
图11 负载工况下轨迹跟踪仿真曲线
Fig.11 Trajectory tracking simulation curve under loaded conditions
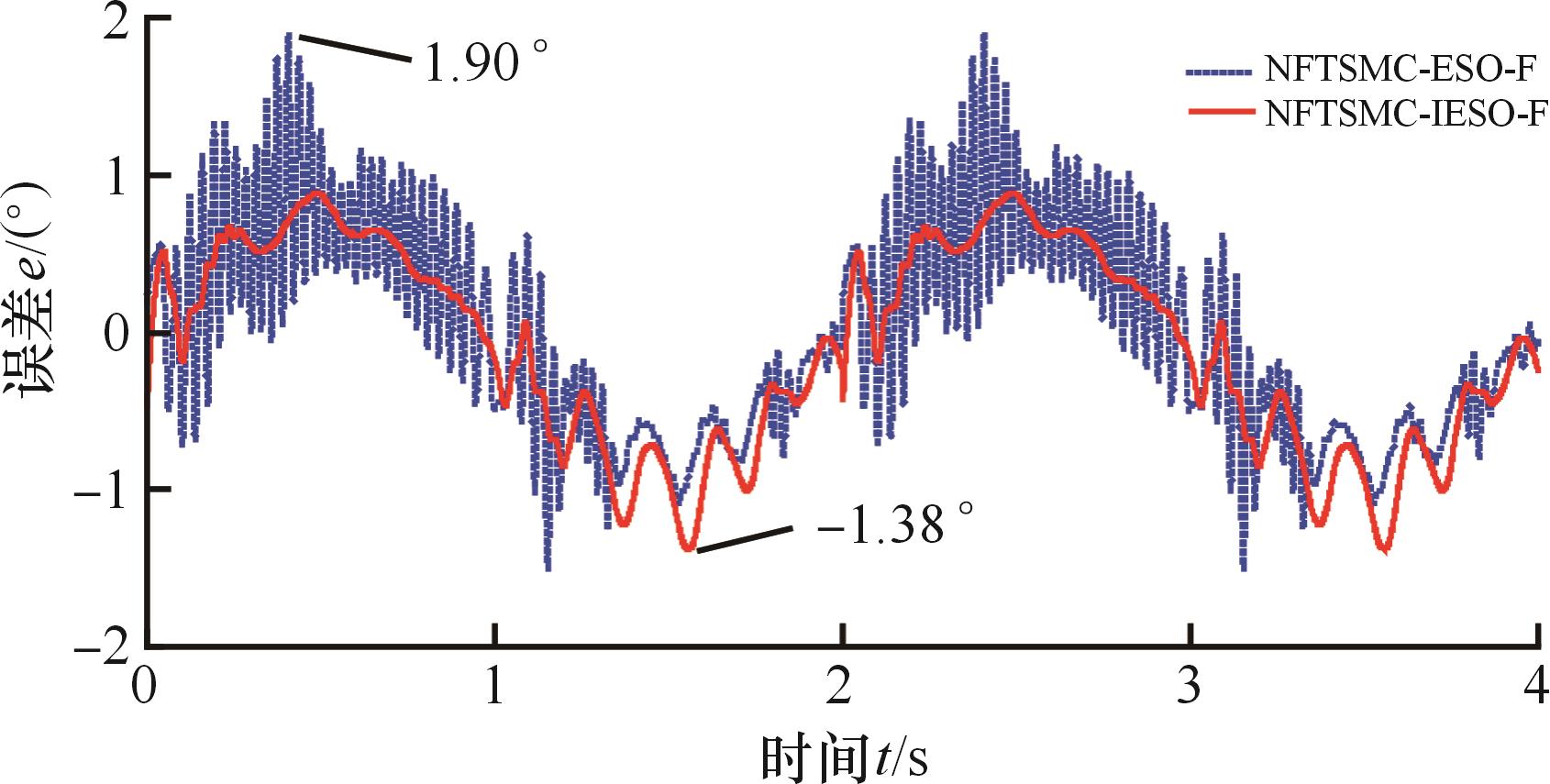
图12 负载工况下轨迹跟踪仿真误差曲线
Fig.12 Trajectory tracking simulation error curve under loaded conditions
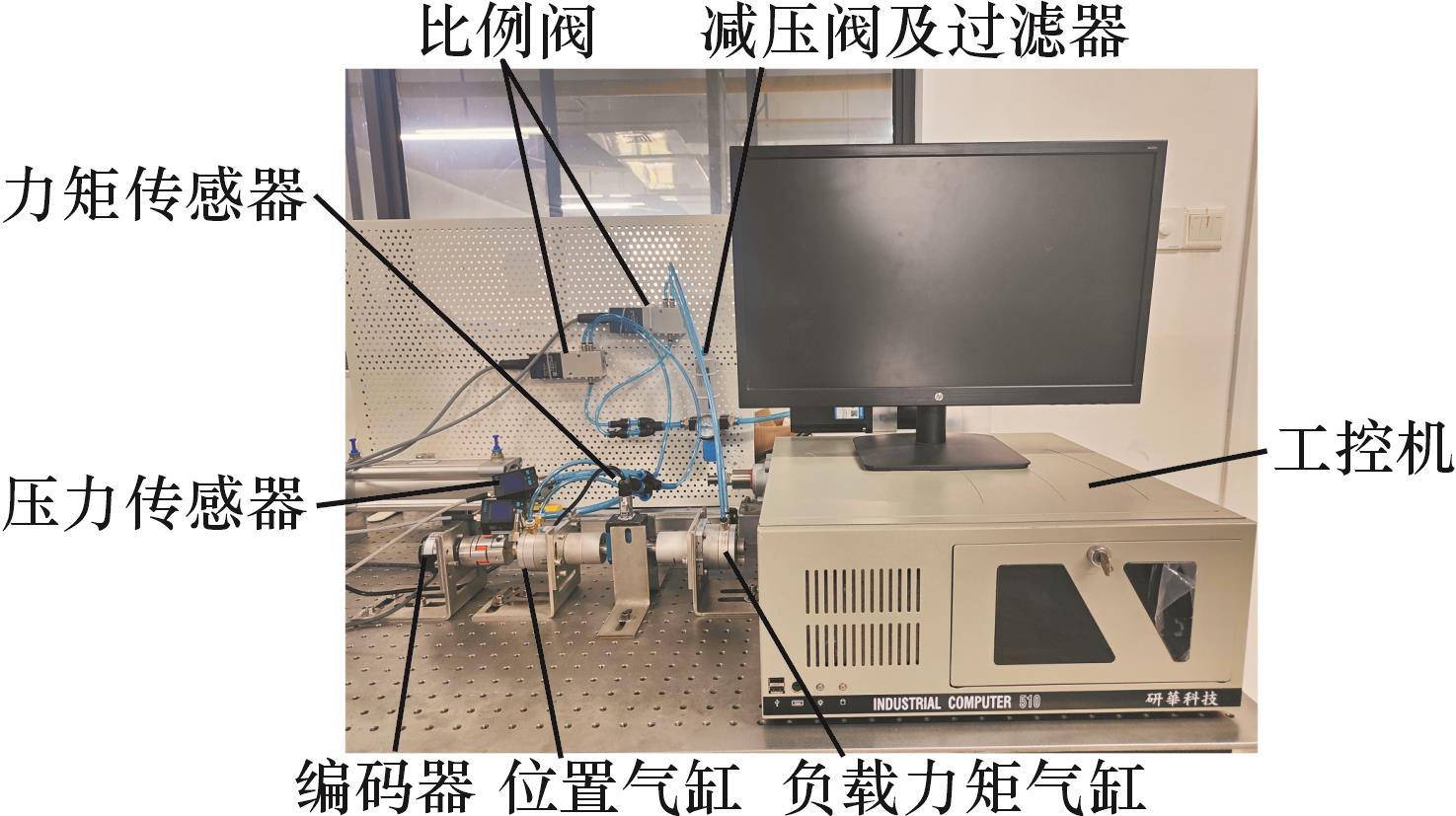
图13 气动伺服平台
Fig.13 Pneumatic servo platform
| 元器件 | 型号 | 主要参数 |
|---|---|---|
| 摆动气缸 | DSM-T-12-270-A-B | 行程0°~270° |
比例阀 过滤减压阀 | MPYE-5-M5-010-B LFR-3/8-D-MINI-MPA | 限制频率115 Hz,压力范围0.05~1.20 MPa |
| 力矩传感器 | QLN-10-50 N·m | 精度0.3% |
| 压力传感器 | SPAU-P10R-HG18FD-L-PNLK-PNVBA-M8U | 精度0.15% |
| 编码器 | E6C3-CWZ3EH | 分辨率3600 PPR |
表3 主要实验设备参数
Tab.3 Main experimental equipment parameters
| 元器件 | 型号 | 主要参数 |
|---|---|---|
| 摆动气缸 | DSM-T-12-270-A-B | 行程0°~270° |
比例阀 过滤减压阀 | MPYE-5-M5-010-B LFR-3/8-D-MINI-MPA | 限制频率115 Hz,压力范围0.05~1.20 MPa |
| 力矩传感器 | QLN-10-50 N·m | 精度0.3% |
| 压力传感器 | SPAU-P10R-HG18FD-L-PNLK-PNVBA-M8U | 精度0.15% |
| 编码器 | E6C3-CWZ3EH | 分辨率3600 PPR |
| 控制策略 | em/(°) | erms/(°) |
|---|---|---|
| PID | 7.75 | 3.56 |
| NFTSMC | 3.63 | 1.66 |
| NFTSMC-IESO | 1.39 | 0.70 |
| NFTSMC-IESO-F | 1.05 | 0.65 |
表4 0.5 Hz下位置跟踪系统性能指标
Tab.4 Performance metrics of position tracking system at 0.5 Hz
| 控制策略 | em/(°) | erms/(°) |
|---|---|---|
| PID | 7.75 | 3.56 |
| NFTSMC | 3.63 | 1.66 |
| NFTSMC-IESO | 1.39 | 0.70 |
| NFTSMC-IESO-F | 1.05 | 0.65 |
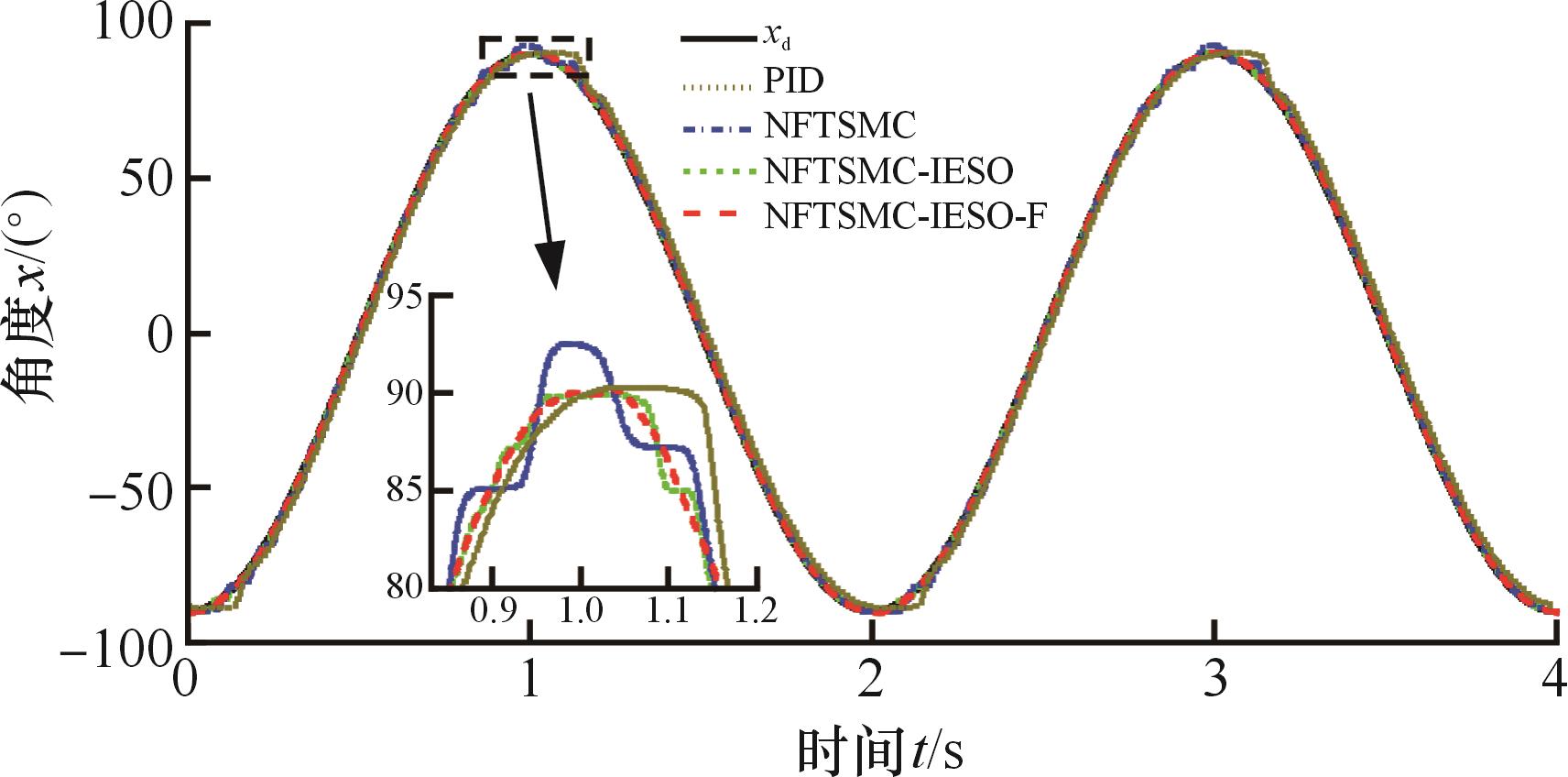
图14 0.5 Hz下轨迹跟踪实验曲线
Fig.14 Trajectory tracking experimental curve at 0.5 Hz
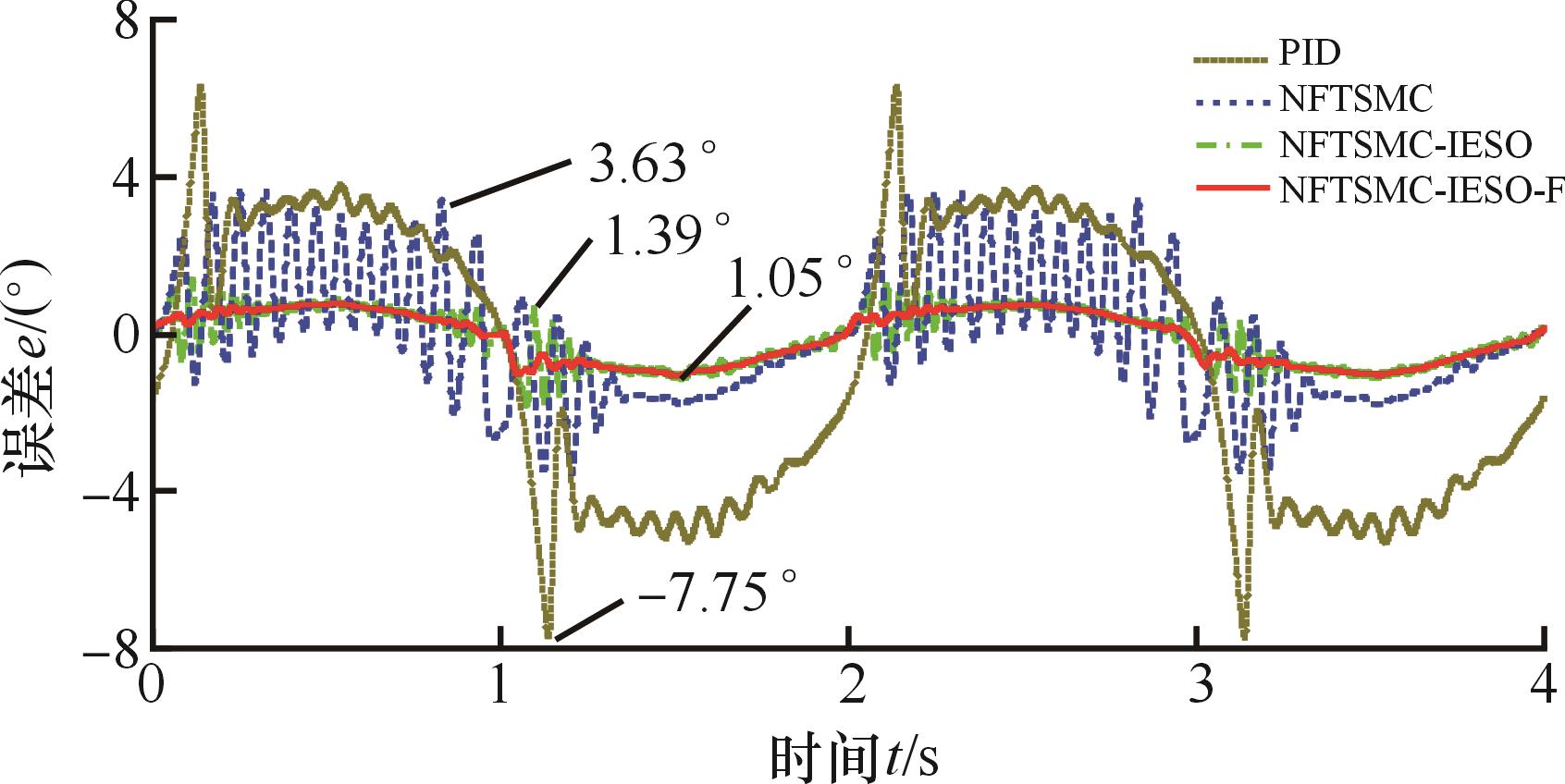
图15 0.5 Hz下轨迹跟踪实验误差曲线
Fig.15 Trajectory tracking experimental error curve at 0.5 Hz
| 控制策略 | em/(°) | erms/(°) |
|---|---|---|
| PID | 17.88 | 7.61 |
| NFTSMC | 10.92 | 4.24 |
| NFTSMC-IESO | 7.03 | 2.84 |
| NFTSMC-IESO-F | 4.19 | 2.55 |
表5 1.5 Hz下位置跟踪系统性能指标
Tab.5 Performance metrics of position tracking system at 1.5 Hz
| 控制策略 | em/(°) | erms/(°) |
|---|---|---|
| PID | 17.88 | 7.61 |
| NFTSMC | 10.92 | 4.24 |
| NFTSMC-IESO | 7.03 | 2.84 |
| NFTSMC-IESO-F | 4.19 | 2.55 |
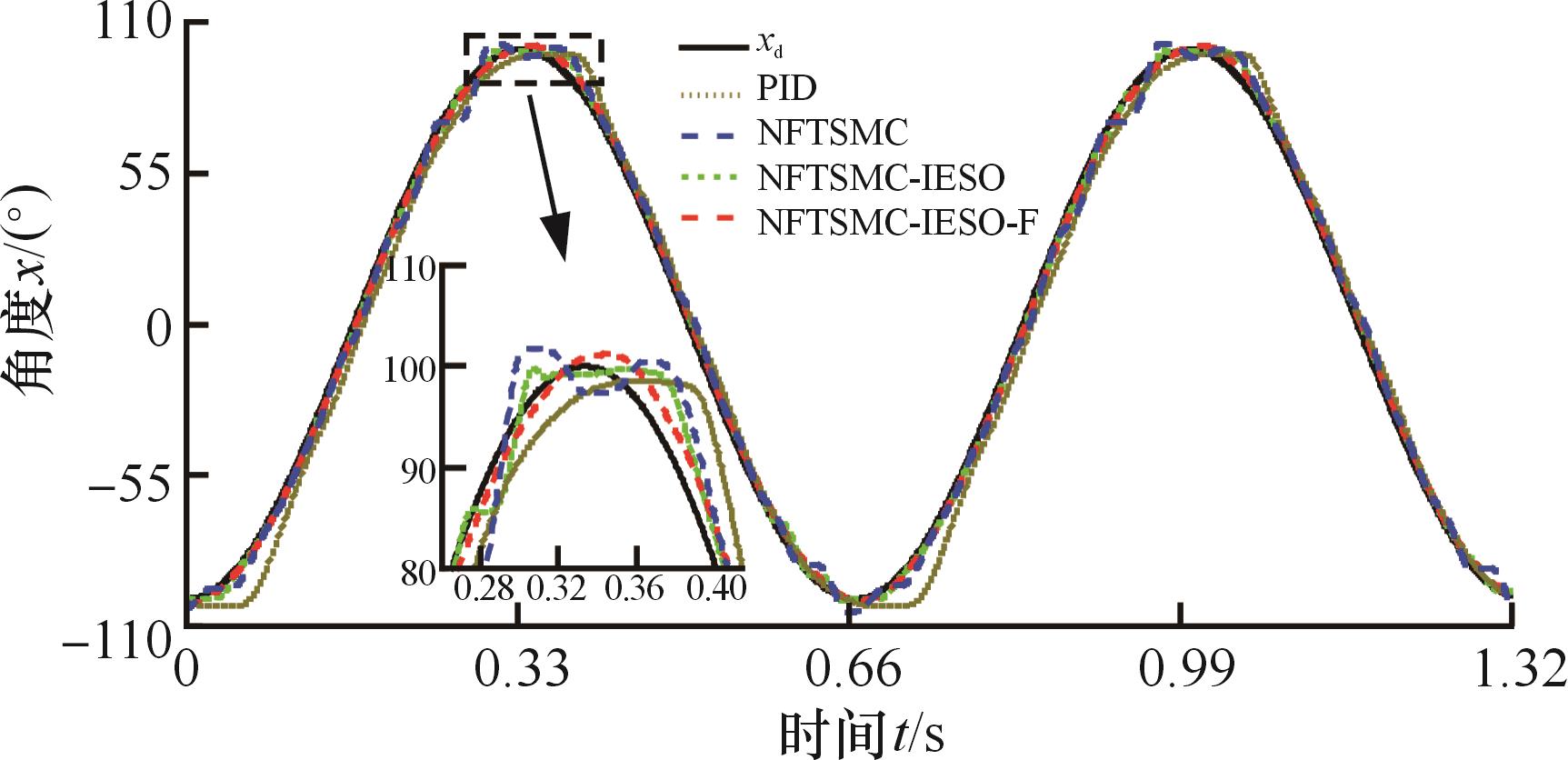
图16 1.5 Hz下轨迹跟踪实验曲线
Fig.16 Trajectory tracking experimental curve at 1.5 Hz
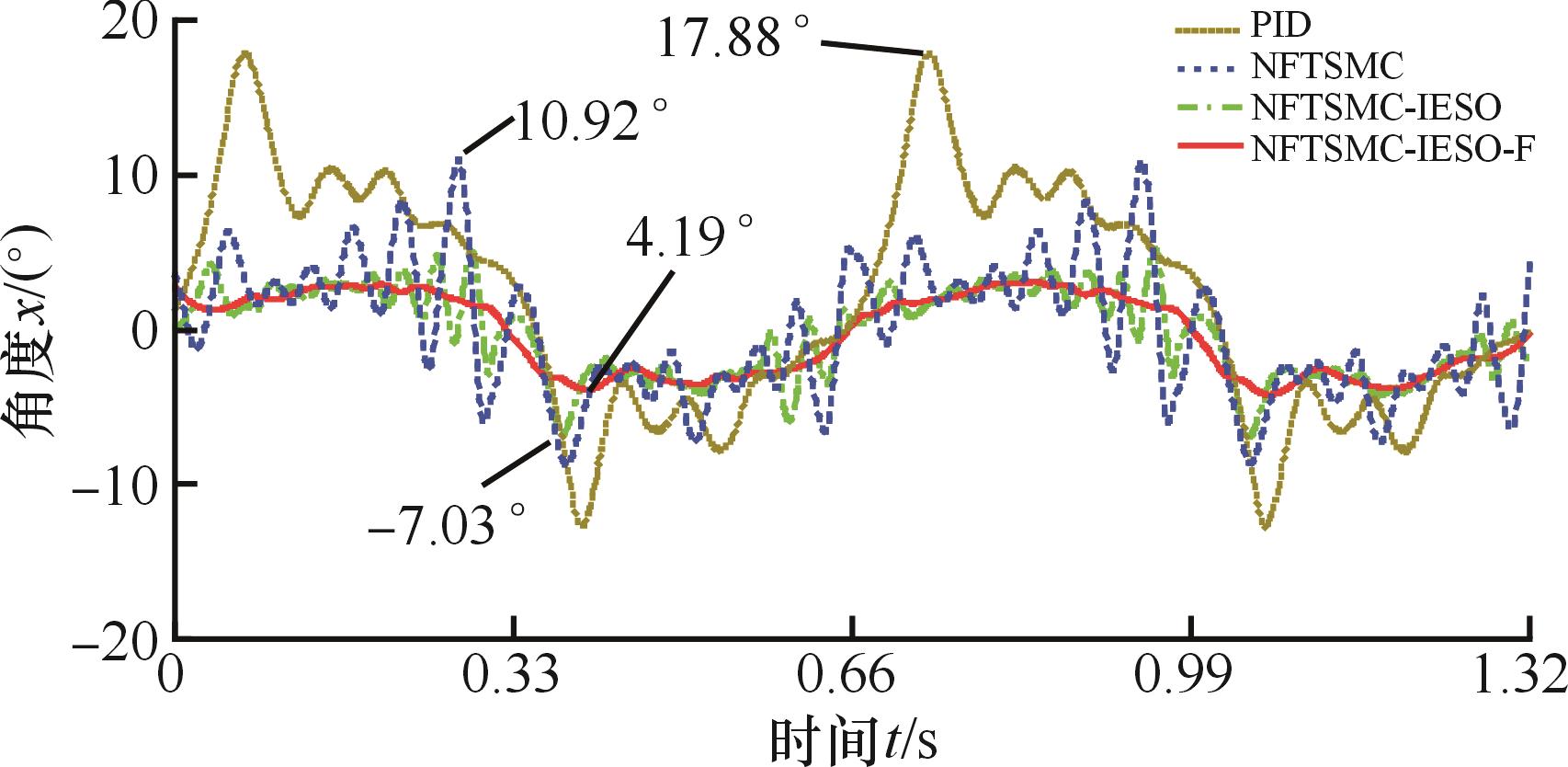
图17 1.5 Hz下轨迹跟踪实验误差曲线
Fig.17 Trajectory tracking experimental error curve at 1.5 Hz
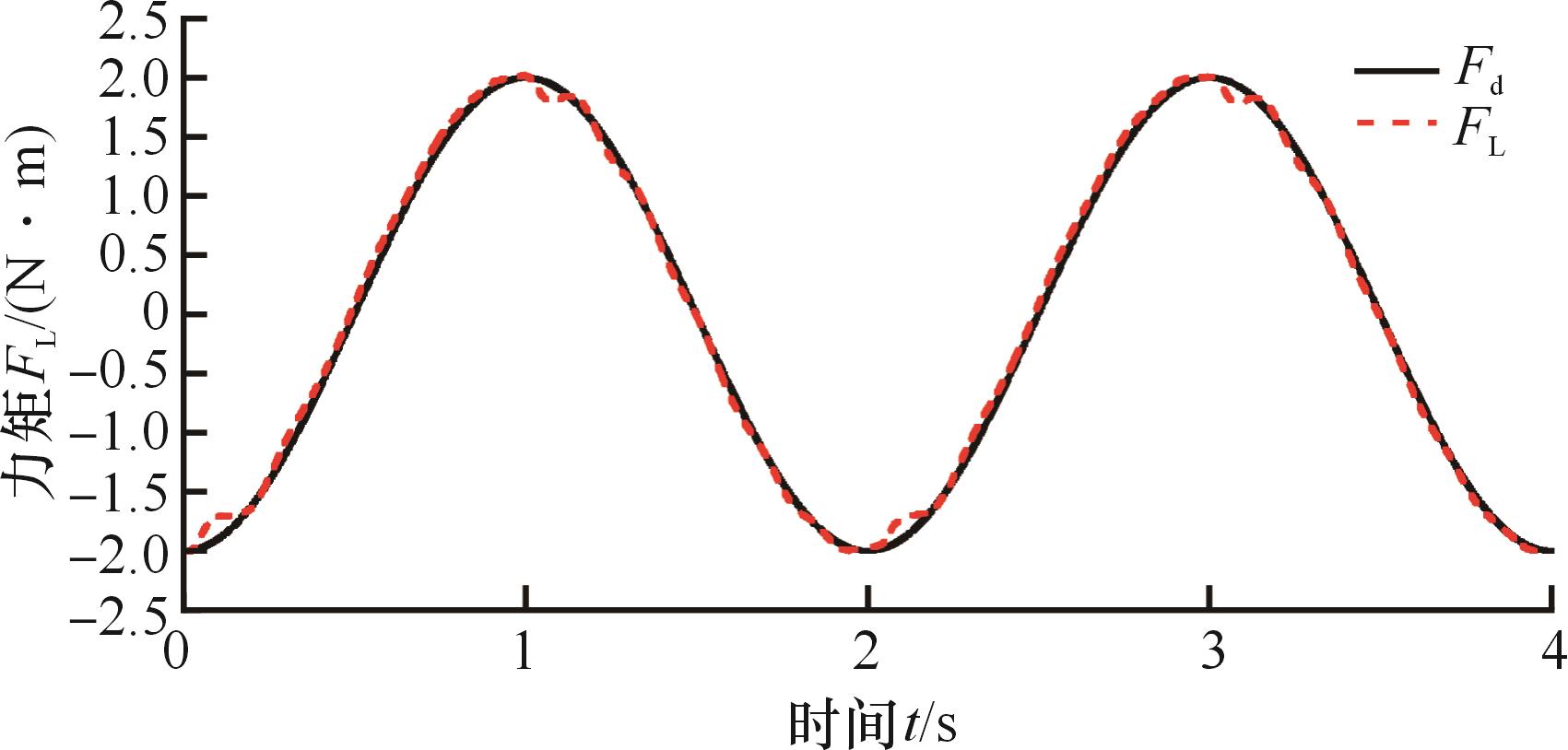
图18 负载力矩响应实验曲线
Fig.18 Torque response experimental curve
| 控制策略 | em/(°) | erms/(°) |
|---|---|---|
| NFTSMC-ESO-F | 2.86 | 1.07 |
| NFTSMC-IESO-F | 1.50 | 0.68 |
表6 外界动态负载下位置跟踪系统性能指标
Tab.6 Performance metrics of position tracking system under external dynamic load
| 控制策略 | em/(°) | erms/(°) |
|---|---|---|
| NFTSMC-ESO-F | 2.86 | 1.07 |
| NFTSMC-IESO-F | 1.50 | 0.68 |
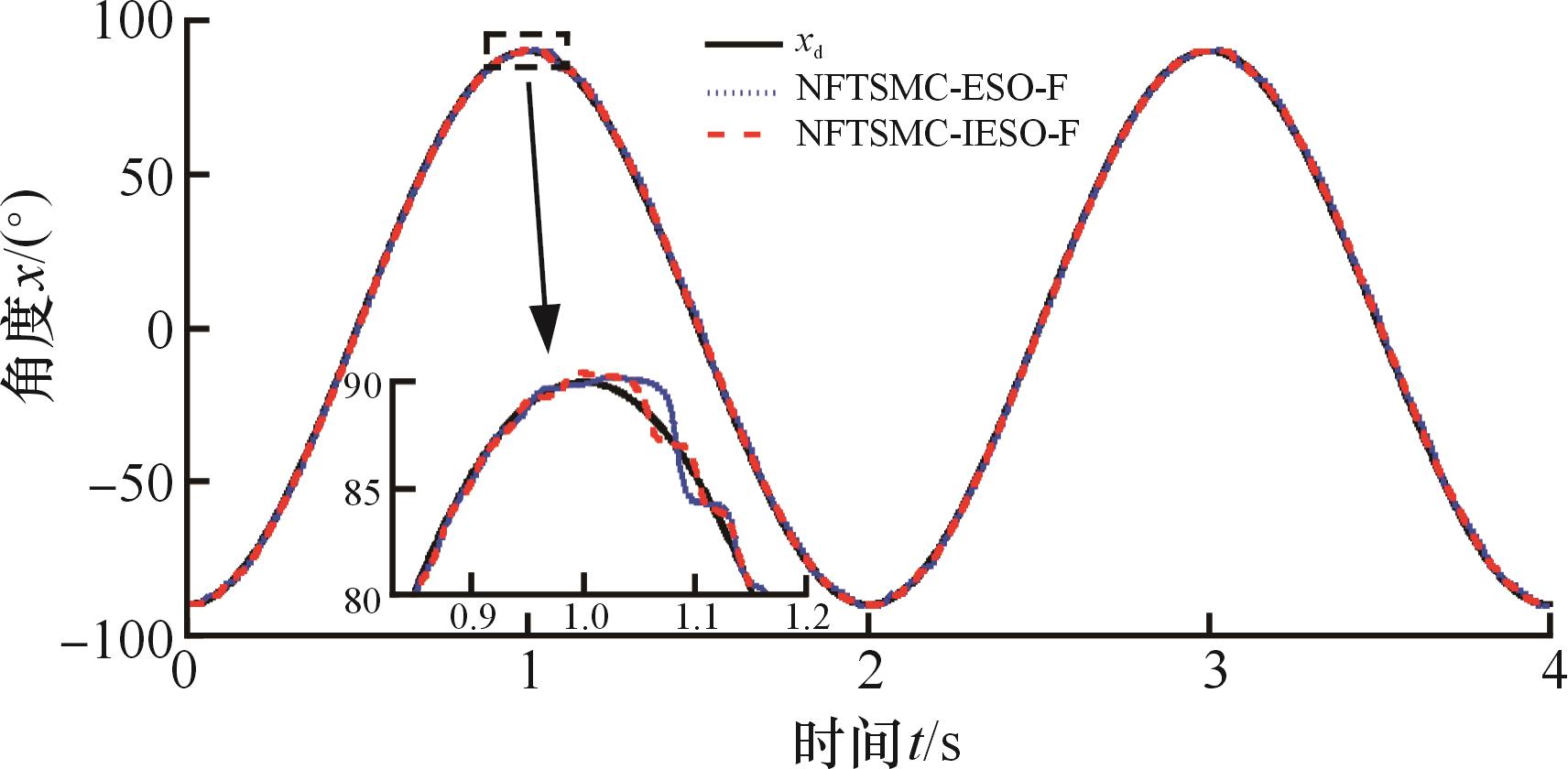
图19 负载工况下轨迹跟踪实验曲线
Fig.19 Trajectory tracking experimental curve under loaded conditions
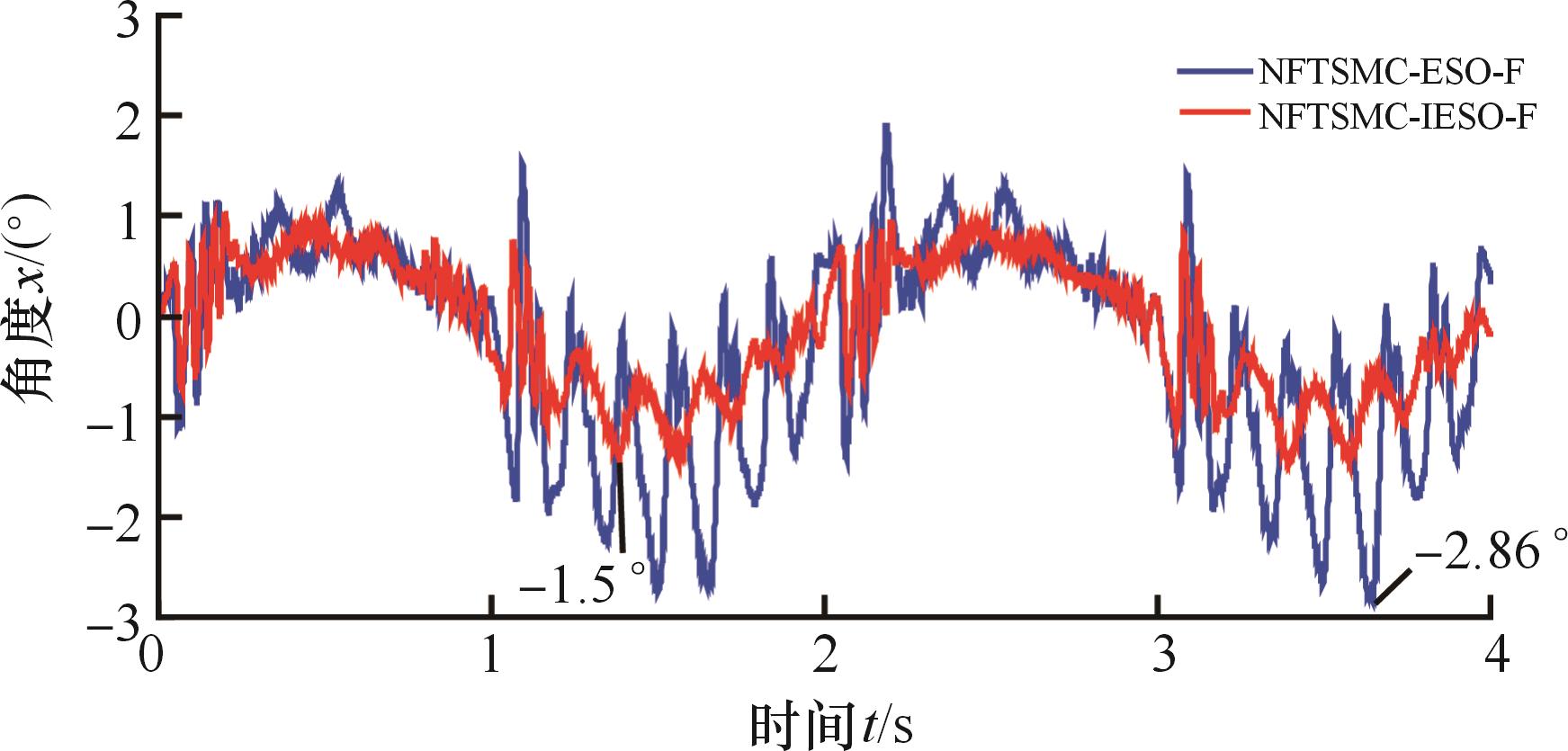
图20 负载工况下轨迹跟踪实验误差曲线
Fig.20 Trajectory tracking experimental error curve under loaded conditions
| [1] | QIAN P, LIU L, WU J, et al. A Novel Double-acting, Air-floating, Frictionless Pneumatic Actuator[J]. Sensors and Actuators A: Physical, 2023, 362: 114674. |
| [2] | QIAN P, PU C, HE D, et al. A Method to Improve the Motion Trajectory Tracking Accuracy of Pneumatic Servo System—by Exciting Longitudinal Resonance[J]. Journal of the Brazilian Society of Mechanical Sciences Engineering, 2022, 44(8):376-390. |
| [3] | ZHANG Y, LI K, XU M, et al. Medical Grabbing Servo System with Friction Compensation Based on the Differential Evolution Algorithm[J]. Chinese Journal of Mechanical Engineering, 2021, 34: 1-15. |
| [4] | 金鸿雁, 王磊, 赵希梅. 基于摩擦补偿的两轴直驱伺服进给系统自适应非线性滑模轮廓控制[J]. 中国机械工程, 2023, 34(11): 1335-1342. |
| JIN Hongyan, WANG Lei, ZHAO Ximei, et al. Adaptive Nonliner Sliding Mode Control of Two-axis Direct Drive Sero Feed Systems Based on Fricition Compensation [J]. China Mechanical Engineering, 2023, 34(11): 1335-1342. | |
| [5] | 魏琼, 陆浩, 吴子龙, 等. 基于刚度可调的气动位置伺服系统摩擦补偿控制[J]. 西北工业大学学报, 2024, 42(1): 138-148. |
| WEI Qiong, LU Hao, WU Zilong, et al. Friction Compensation Control of Pneumatic Position Servo System Based on the Adjustable Stiffness[J]. Journal of Northwestern Polytechnical University, 2024, 42(1): 138-148. | |
| [6] | 魏琼, 陆浩, 刘伟恒, 等. 双阀气动伺服系统的LuGre摩擦模型补偿研究[J]. 机械科学与技术, 2023, 42(10): 1609-1616. |
| WEI Qiong, LU Hao, LIU Weiheng, et al. Study on LuGre Model for Friction Compensation of Dual-valve Pneumatic Servo System[J]. Mechanical Science and Technology for Aerospace Engineering, 2023, 42(10): 1609-1616. | |
| [7] | REN H P, JIAO S S, LI J, et al. Adaptive Neural Network Control of Pneumatic Servo System Considering State Constraints[J]. Mechanical Systems and Signal Processing, 2022, 162: 107979. |
| [8] | ZHANG J, CUI C, GU S, et al. Trajectory Tracking Control of Pneumatic Servo System: a Variable Gain ADRC Approach[J]. IEEE Transactions on Cybernetics, 2022, 53(11) : 6977-6986. |
| [9] | 刘福才, 郭根旺. 气动变载荷加载系统的分数阶PID改进型自抗扰控制[J]. 振动与冲击, 2022, 41(15): 116-121. |
| LIU Fucai, GUO Genwang. Fractional Order PID Improved Active Disturbance Rejection Control for Pneumatic Variable Load Loading System[J]. Journal of Vibration and Shock, 2022, 41(15):116-121. | |
| [10] | 梁定坤, 孙宁, 吴易鸣, 等. 采用扰动估计的气动人工肌肉系统非线性控制[J]. 控制理论与应用,2019, 36(11): 1912-1919. |
| LIANG Dingkun, SUN Ning, WU Yiming, et al. Nonlinear Control for Pneumatic Artificial Muscle Systems with Disturbance Estimation [J]. Control Theory & Applications, 2019, 36(11): 1912-1919. | |
| [11] | 刘艳雄, 王根聚, 华林, 等. 采用自适应滑模变结构控制的精冲机双驱动协调控制系统[J]. 中国机械工程, 2021, 32(18): 2189-2196. |
| LIU Yanxiong, WANG Genju, HUA Lin, et al. Double-drive Coordinated Control Systems of Fine Stamping Machines Based on Adaptive Sliding Mode Variable Structure Control[J]. China Mechanical Engineering, 2021, 32(18): 2189-2196. | |
| [12] | 吕播阳, 孟庆鑫, 肖怀, 等. 基于改进三元模型的波纹管型气动软体驱动器神经网络滑模控制[J]. 中国机械工程, 2024, 35(8): 1414-1425. |
| Boyang LYU, MENG Qingxin, XIAO Huai, et al. Neural Network Sliding Mode Control of Bellows type Pneumatic Soft Actuators Based on Improved Ternary Model[J]. China Mechanical Engineering, 2024, 35(8): 1414-1425. | |
| [13] | HO C M, AHN K K. Extended State Observer-based Adaptive Neural Networks Backstepping Control for Pneumatic Active Suspension with Prescribed Performance Constraint[J].Applied Sciences, 2023, 13(3): 1705. |
| [14] | LI Q, DING B. Design of Backstepping Sliding Mode Control for a Polishing Robot Pneumatic System Based on the Extended State Observer[J]. Machines, 2023, 11(9): 904-927. |
| [15] | 郭新平, 汪成文, 刘华, 等. 基于扩张状态观测器的泵控电液伺服系统滑模控制[J]. 北京航空航天大学学报, 2020, 46(6): 1159-1168. |
| GUO Xinping, WANG Chengwen, LIU Hua, et al. Extended-state-observer Based Sliding Mode Control for Pump-controlled Electro-hydraulic Servo System [J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168. | |
| [16] | 张振, 郭一楠, 巩敦卫, 等. 基于改进扩展状态观测器的液压锚杆钻机滑模摆角控制[J]. 自动化学报, 2023, 49(6): 1256-1271. |
| ZHANG Zhen, GUO Yinan, GONG Dunwei, et al. Sliding Mode Swing Angle Control for a Hydraulic Roofbolter Based on Improved Extended State Observer [J]. Acta Automatica Sinica,2023,49(6): 1256-1271. | |
| [17] | ZHAO L, LI Z, LI H, et al. Backstepping Integral Sliding Mode Control for Pneumatic Manipulators Via Adaptive Extended State Observers[J]. ISA transactions, 2024, 144: 374-384. |
| [18] | 刘国海, 李持衡, 沈跃, 等. 基于滑模自抗扰的同步转向高地隙喷雾机姿态控制[J]. 农业机械学报, 2023, 54(3): 180-189. |
| LIU Guohai, LI Chiheng, SHEN Yue, et al. Sliding Mode Active Disturbance Rejection Control of Synchronous Steering High Clearance Sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(3): 180-189. | |
| [19] | LU K, TIAN H, ZHEN P, et al. Conversion Flight Control for Tiltrotor Aircraft via Active Disturbance Rejection Control[J]. Aerospace, 2022, 9(3): 155-173. |
| [20] | TRAN X B. Nonlinear Control of a Pneumatic Actuator Based on a Dynamic Friction Model[J]. Journal of Mechanical Engineering, 2021, 67(9) : 458-472. |
| [21] | WANG K, CHEN G, ZHANG T. Pump-controlled AGC Micro-displacement Position Control of Lithium Battery Pole Strip Mill Based on Friction Model[J]. Processes, 2023, 11(9) : 2587. |
| [22] | 王军晓, 闫小东, 徐建明. 基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制[J]. 控制理论与应用, 2023, 40(7): 1199-1207. |
| WANG Junxiao, YAN Xiaodong, XU Jianming. Nonsingular Fast Terminal-sliding-mode Control for Flexible Manipulator System Based on Disturbance and Friction Compensation [J]. Control Theory & Applications, 2023, 40(7): 1199-1207. | |
| [23] | 赵天一, 贵献国, 乔岳, 等. 基于平滑GMS模型和改进扩张状态观测器的复合摩擦补偿[J]. 中国电机工程学报, 2024, 44(5): 1999-2009. |
| ZHAO Tianyi, GUI Xianguo, QIAO Yue, et al. Composite Friction Compensation Based on Smooth GMS Model and Improved Extended State Observer [J]. Proceedings of the CSEE, 2024, 44(5): 1999-2009. | |
| [24] | 张迪嘉, 高路平, 周少梁, 等. 高压气动压力伺服系统的鲁棒控制[J]. 中国机械工程, 2024, 35(7): 1141-1150. |
| ZHANG Dijia, GAO Luping, ZHOU Shaoliang, et al. Robust Control of High-pressure Pneumatic Pressure Servo Systems [J]. China Mechanical Engineering, 2024, 35(7): 1141-1150. | |
| [25] | 张斌. 自抗扰控制的气缸伺服系统定位研究[D].秦皇岛:燕山大学, 2018. |
| ZHANG Bin. The Positioning Study for a Cylinder Servo System via ADRC Approach[D]. Qinhuang-dao: Yanshan University, 2018. | |
| [26] | 叶浩楠. 基于遗传算法的非线性摩擦参数辨识研究[D].南京: 南京大学, 2013. |
| YE Haonan. Nonlinear Friction Parameters Idetification Research Based on Genetic Algorithm[D].Nanjing: Nanjing University, 2013. | |
| [27] | 吕南方,夏运霞,张兵,等. 光电跟踪系统非均匀受力摩擦补偿研究[J]. 激光技术,2024,48(4):455-462. |
| Nanfang LYU, XIA Yunxia, ZHANG Bing, et al. Research on Friction Compensation of Non-uniform Force in Photoelectirc Tracking System[J]. Laser Technology,2024,48(4):455-462. | |
| [28] | 史蒂芬, 侯润民, 顾晓辉, 等. 随动系统的新型非奇异快速终端滑模控制 [J]. 中国机械工程, 2022, 33(4): 413-420. |
| SHI Difen, HOU Runmin, GU Xiaohui, et al. Novel NFTSM Control for Servo Systems[J]. China Mechanical Engineering, 2022, 33(4): 413-420. | |
| [29] | CHEN W H, YANG J, GUO L, et al. Disturbance-observer-based Control and Related Methods:an Overview[J]. Transactions on Industrial Electronics, 2015, 63(2): 1083-1095. |
| [30] | LI Y, TAN P, LIU J, et al. A Super-twisting Extended State Observer for Nonlinear Systems [J]. Mathematics, 2022, 10(19): 3584. |
| [31] | 张祝新, 孙辉亮, 王立新, 等. 基于噪声抑制的电液位置伺服系统自抗扰控制方法[J]. 农业机械学报, 2024, 55(2): 450-458. |
| ZHANG Zhuxin, SUN Huiliang, WANG Lixin, et al. Active Disturbance Rejection Control of Electro-Hydraulic Position Servo System Based on Noise Suppression[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(2): 450-458. | |
| [32] | 邱建琪, 留若宸. 永磁同步电机位置伺服系统改进自抗扰控制 [J]. 电机与控制学报, 2019, 23(11): 42-50. |
| QIU Jianqi, LIU Ruoche. Improved Active Disturbance Rejection Control for Permanent Magnet Synchronous Motor Position Servo Systemr [J]. Electric Machines and Control, 2019, 23(11): 42-50. | |
| [33] | 韩京清. 从PID技术到“自抗扰控制”技术 [J]. 控制工程, 2002(3): 13-18. |
| HAN Jingqing. From PID Technique to Active Disturbances Rejection Control Technique [J]. Control Engineering of China, 2002(3): 13-18. | |
| [34] | 李中奇, 张俊豪, 唐博伟. 高速列车精确停车的超扭曲非奇异终端滑模控制方法 [J]. 铁道学报, 2023, 45(12): 83-91. |
| LI Zhongqi, ZHANG Junhao, TANG Bowei. Super-twisting Nonsingular Terminal Sliding Mode Control Method for Accurate Stopping of High-speed Trains [J]. Journal of the China Railway Society, 2023, 45(12): 83-91. | |
| [35] | YANG F, ZHANG K, YU L. Adaptive Super-twisting Algorithm-based Nonsingular Terminal Sliding Mode Guidance Law [J]. Journal of Control Science and Engineering, 2020, 2020: 1058347. |
| [1] | 陈立娟, 吴蝶, 高伟, 魏龙正, 曹晟维, 艾超, 李景彬. 基于反馈线性化与非线性扰动补偿的液压型风电机组有功功率控制研究[J]. 中国机械工程, 2023, 34(23): 2889-2897. |
| [2] | 吴迎年, 张晶, 李庆奎, 焦帅, . 需求扰动作用下的供应链库存系统优化模型[J]. 中国机械工程, 2023, 34(14): 1672-1682,1700. |
| [3] | 金鸿雁, 王磊, 赵希梅. 基于摩擦补偿的两轴直驱伺服进给系统自适应非线性滑模轮廓控制[J]. 中国机械工程, 2023, 34(11): 1335-1342. |
| [4] | 倪涛, 徐海远, 李东, 张红彦. 六自由度平台动力学前馈柔顺控制研究[J]. 中国机械工程, 2022, 33(06): 683-689. |
| [5] | 陈东宁, 刘一丹, 姚成玉, 蒋栋林, 王可勋, . 基于修正黏性摩擦LuGre模型的比例多路阀摩擦补偿[J]. 中国机械工程, 2017, 28(01): 62-68. |
| [6] | 李敏, 王家序, 肖科, 黄超, 徐超. 基于模糊RBF神经网络动态摩擦分块补偿的机器人数字鲁棒滑模控制算法[J]. 中国机械工程, 2012, 23(23): 2792-2796. |
| [7] | 倪敬;项占琴;. 管坯冷定心孔电火花加工系统控制研究[J]. J4, 2009, 20(09): 0-1011. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||