


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (09): 1951-1960.DOI: 10.3969/j.issn.1004-132X.2025.09.006
黄宁宁1( ), 尤晶晶1,2(), 叶鹏达3, 沈惠平3, 李成刚4, 吴洪涛4
), 尤晶晶1,2(), 叶鹏达3, 沈惠平3, 李成刚4, 吴洪涛4
收稿日期:2024-06-10
出版日期:2025-09-25
发布日期:2025-10-15
通讯作者:
尤晶晶
作者简介:黄宁宁,男,1999年生,硕士研究生。研究方向为并联机器人机构学。E-mail:huangningning1819@163.com。
基金资助:
Ningning HUANG1(), Jingjing YOU1,2(), Pengda YE3, Huiping SHEN3, Chenggang LI4, Hongtao WU4
Received:2024-06-10
Online:2025-09-25
Published:2025-10-15
Contact:
Jingjing YOU
摘要:
六自由度并联机构的正运动学方程非线性且强耦合,一般不具有符号式正解,不利于机器人的实时反馈控制。设计了一种在结构上弱耦合但在运动上可解耦的“7-4”式Stewart型并联机构,解析求解了正运动学方程和杆长协调方程,并开展了奇异性研究。基于“2-1”式运动链综合出六自由度“7-4”式Stewart型并联机构,并基于方位特征集理论,分析了机构的结构耦合特性。基于13个相容方程并运用四面体几何理论,提出了正运动学方程的一种解析求解算法,同时还证明出一般位形下实数解的个数为8(它们两两关于同一平面对称)。根据动球铰之间的几何约束关系,构建了杆长协调方程,研究发现,该方程也具有符号解。推导了机构的Jacobian矩阵,并分析了各种奇异类型。剖析了并联机构正运动学与奇异性之间的内在联系。
中图分类号:
黄宁宁, 尤晶晶, 叶鹏达, 沈惠平, 李成刚, 吴洪涛. 一种运动可解耦的Stewart型并联机构的正运动学及奇异性[J]. 中国机械工程, 2025, 36(09): 1951-1960.
Ningning HUANG, Jingjing YOU, Pengda YE, Huiping SHEN, Chenggang LI, Hongtao WU. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms[J]. China Mechanical Engineering, 2025, 36(09): 1951-1960.
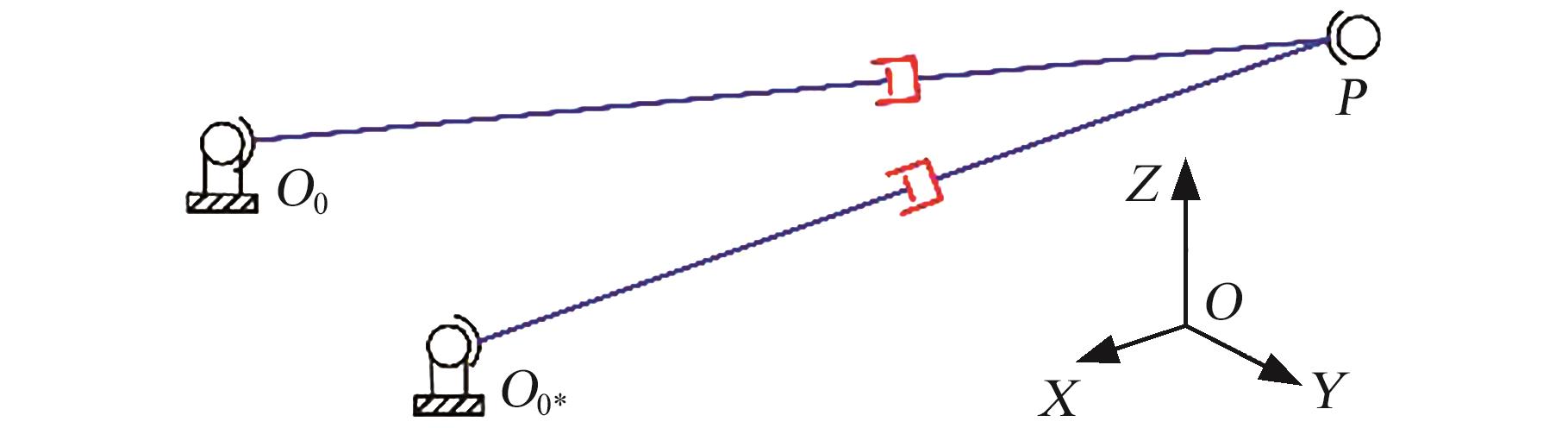
图1 “2-1”式运动链
Fig.1 “2-1” kinamatic link
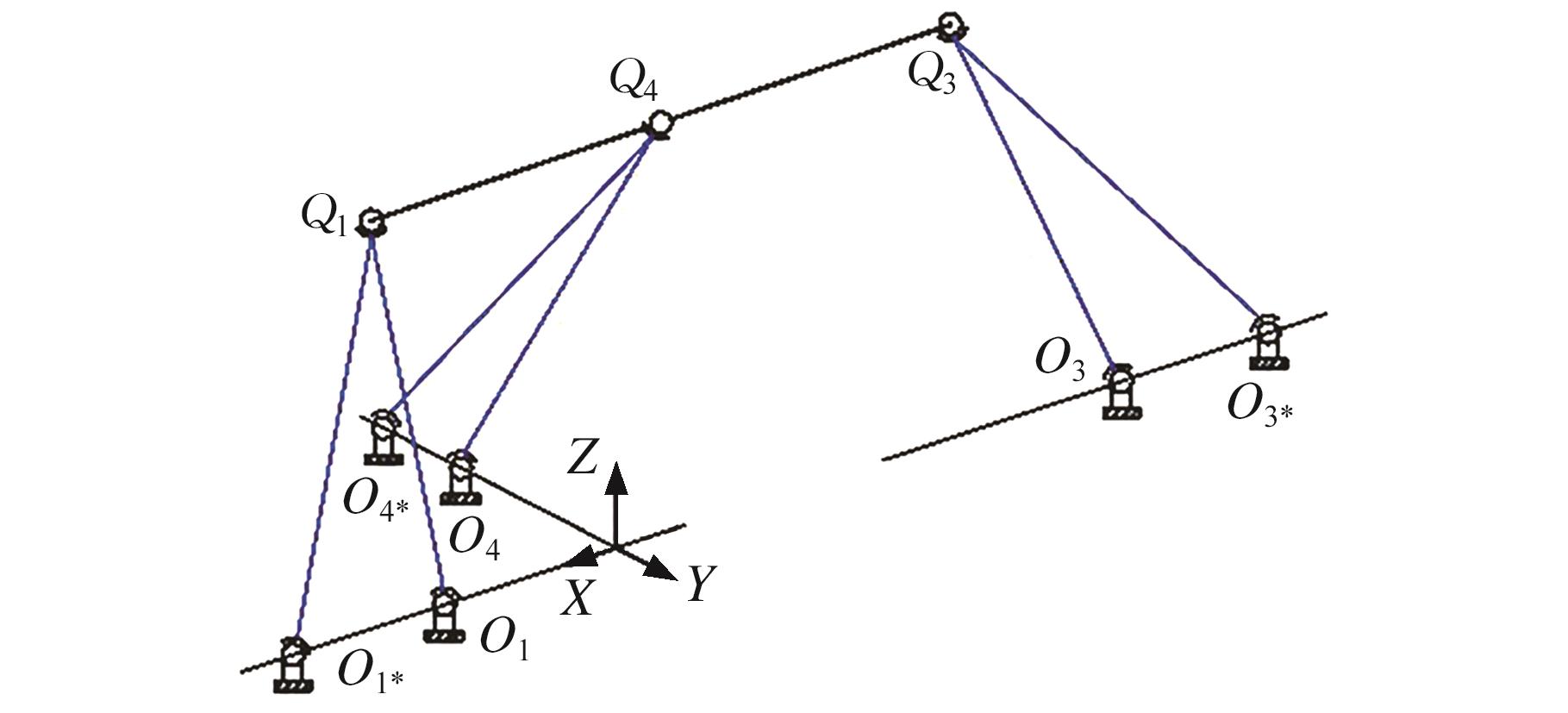
图2 “6-3”式Stewart型并联机构
Fig.2 “6-3” Stewart-type parallel mechanism
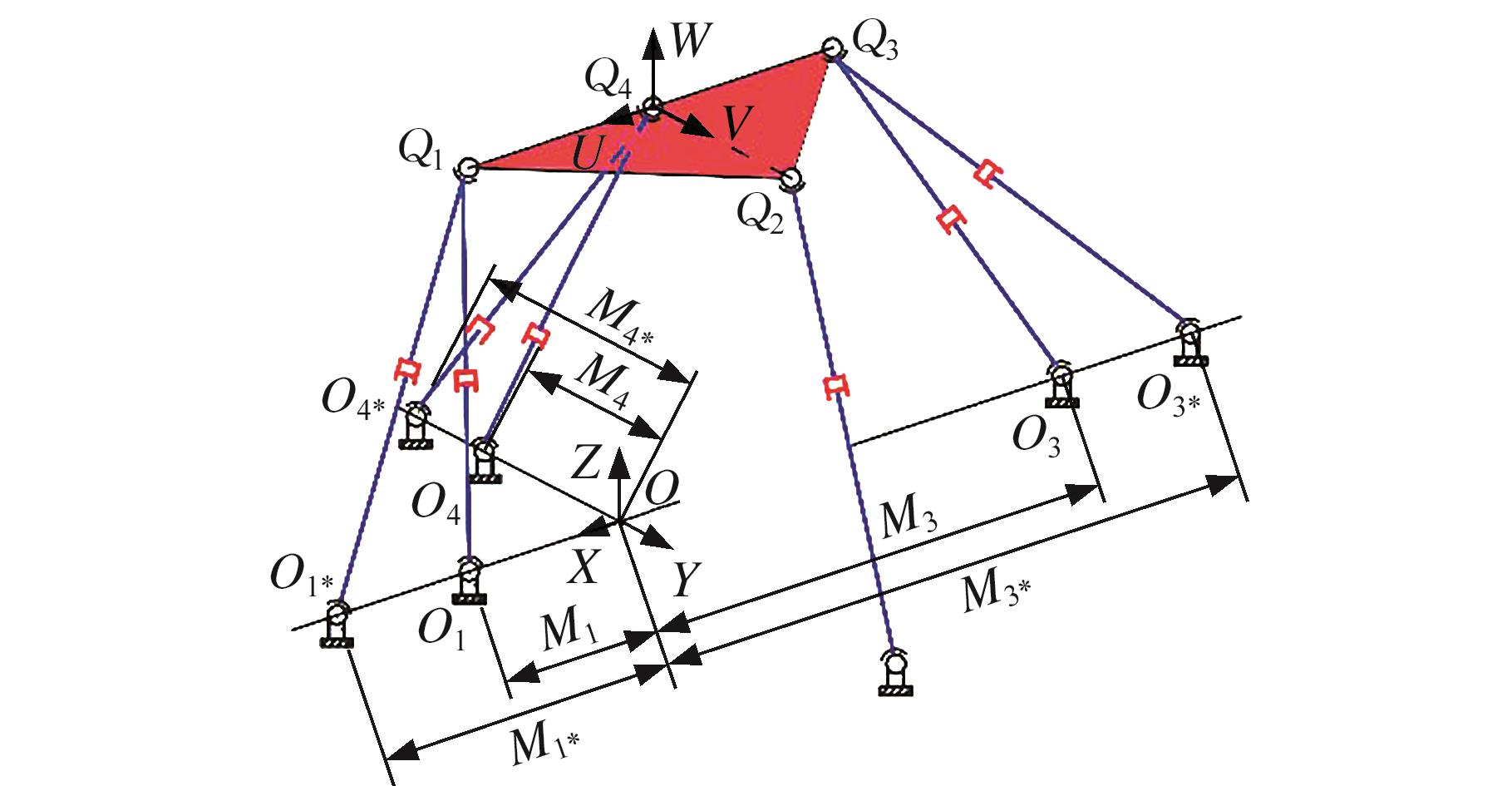
图3 “7-4”式Stewart型并联机构
Fig.3 “7-4” Stewart-type parallel mechanism
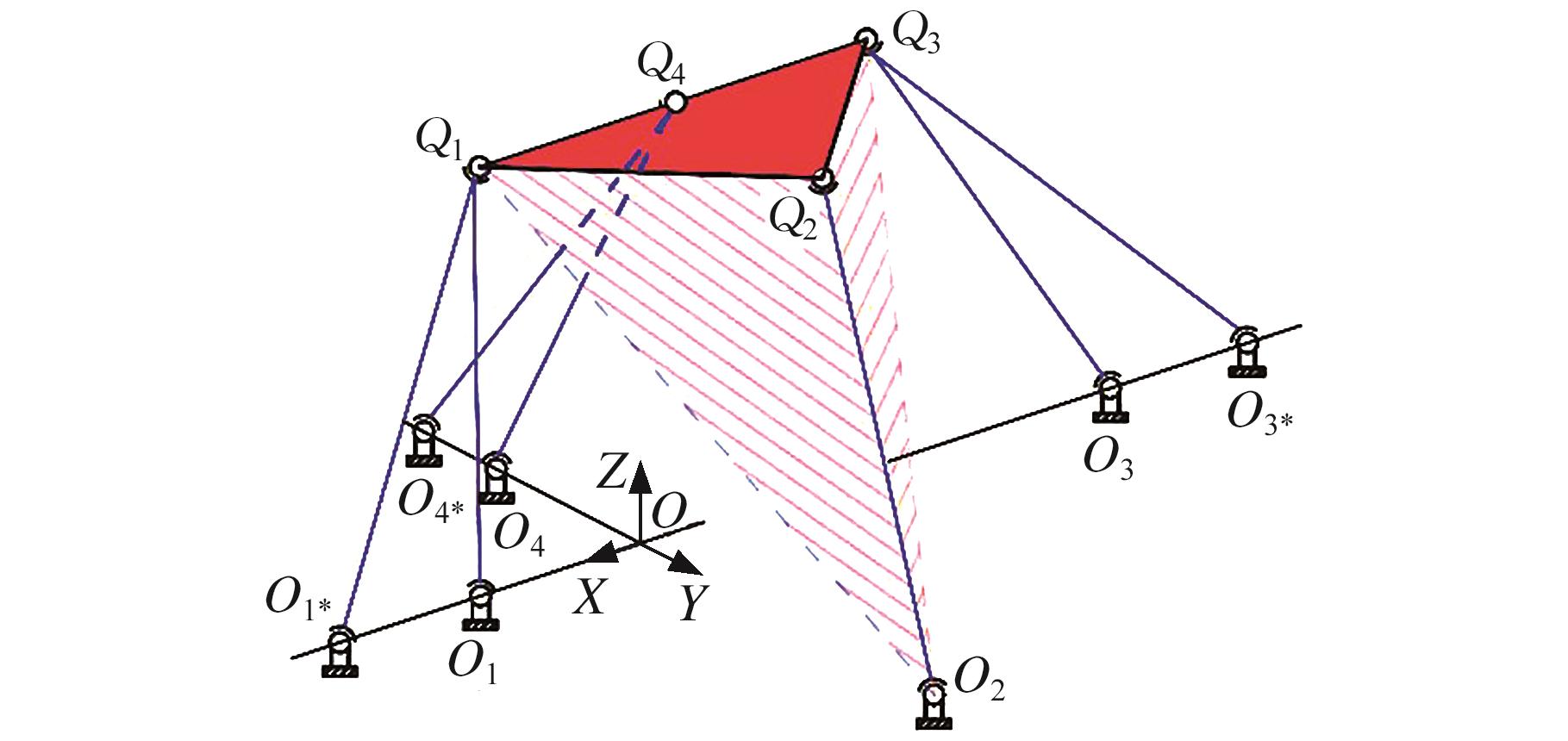
图4 四面体Q2O2Q3Q1
Fig.4 Tetrahedron Q2O2Q3Q1
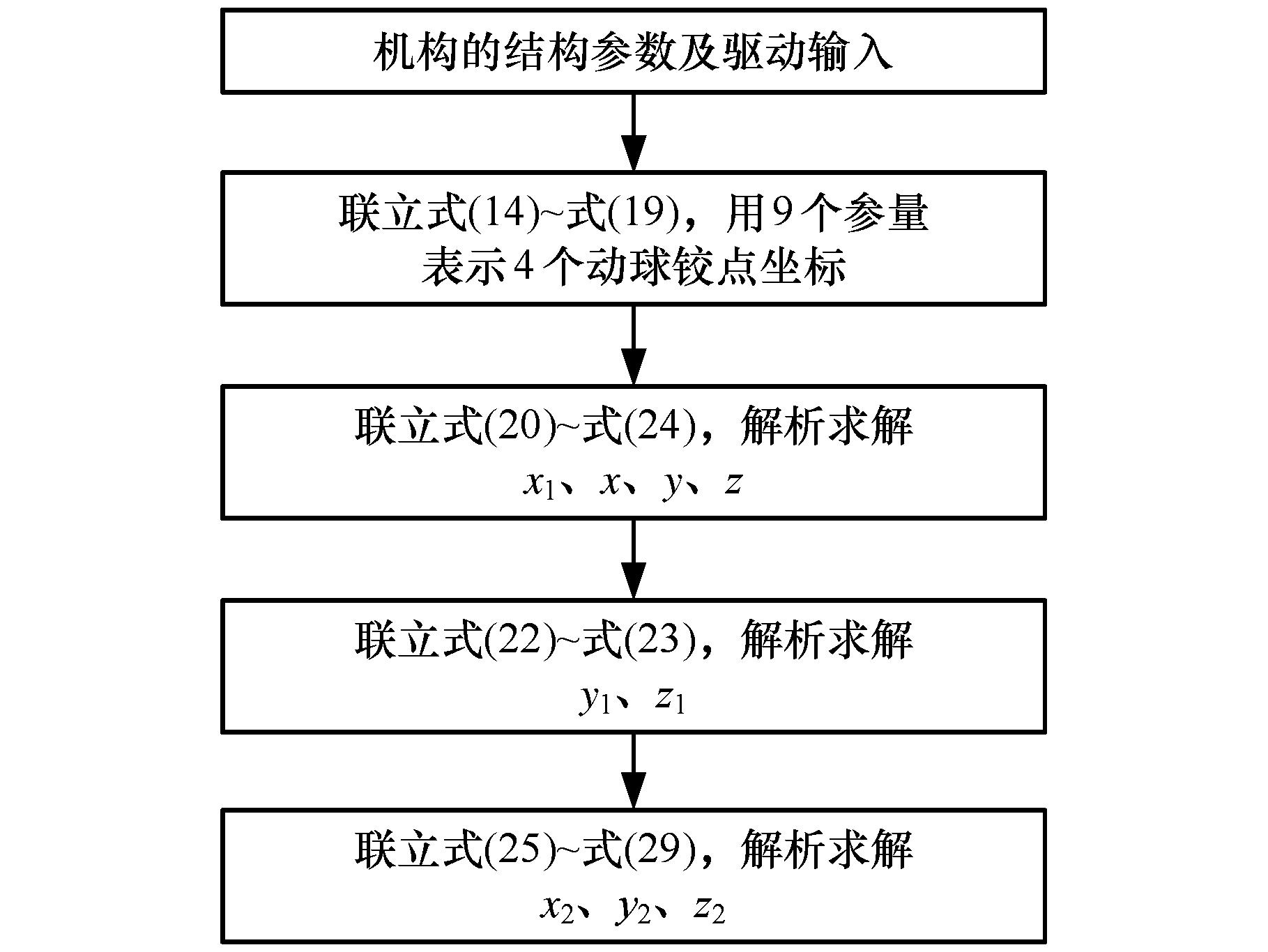
图5 正解流程
Fig.5 Process of forward position solution
| 组别 | Q4 | Q1 | Q2 |
|---|---|---|---|
| 1 | (1)Q4 | (1)Q1(1) | (1)Q2(1) |
| 2 | (1)Q2(2) | ||
| 3 | (1)Q1(2) | (1)Q2(3) | |
| 4 | (1)Q2(4) | ||
| 5 | (2)Q4 | (2)Q1(1) | (2)Q2(1) |
| 6 | (2)Q2(2) | ||
| 7 | (2)Q1(2) | (2)Q2(3) | |
| 8 | (2)Q2(4) |
表1 正运动学方程的多解性
Tab.1 Multiple solutions of forward kinematics
| 组别 | Q4 | Q1 | Q2 |
|---|---|---|---|
| 1 | (1)Q4 | (1)Q1(1) | (1)Q2(1) |
| 2 | (1)Q2(2) | ||
| 3 | (1)Q1(2) | (1)Q2(3) | |
| 4 | (1)Q2(4) | ||
| 5 | (2)Q4 | (2)Q1(1) | (2)Q2(1) |
| 6 | (2)Q2(2) | ||
| 7 | (2)Q1(2) | (2)Q2(3) | |
| 8 | (2)Q2(4) |
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| M1 | 20.000 | M4 | 50.000 | L4 | 67.823 |
| M1* | 40.000 | M4* | 70.000 | L4* | 86.023 |
| x′ | 0.000 | L1 | 38.356 | N1 | 30.000 |
| y′ | 30.000 | L1* | 35.323 | N2 | 42.426 |
| z′ | 0.000 | L2 | 35.868 | N3 | 42.426 |
| M3 | 40.000 | L3 | 43.111 | ||
| M3* | 60.000 | L3* | 56.878 | ||
表2 结构参数及输入参数
Tab.2 Mechanism parameters and input parameters mm
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| M1 | 20.000 | M4 | 50.000 | L4 | 67.823 |
| M1* | 40.000 | M4* | 70.000 | L4* | 86.023 |
| x′ | 0.000 | L1 | 38.356 | N1 | 30.000 |
| y′ | 30.000 | L1* | 35.323 | N2 | 42.426 |
| z′ | 0.000 | L2 | 35.868 | N3 | 42.426 |
| M3 | 40.000 | L3 | 43.111 | ||
| M3* | 60.000 | L3* | 56.878 | ||
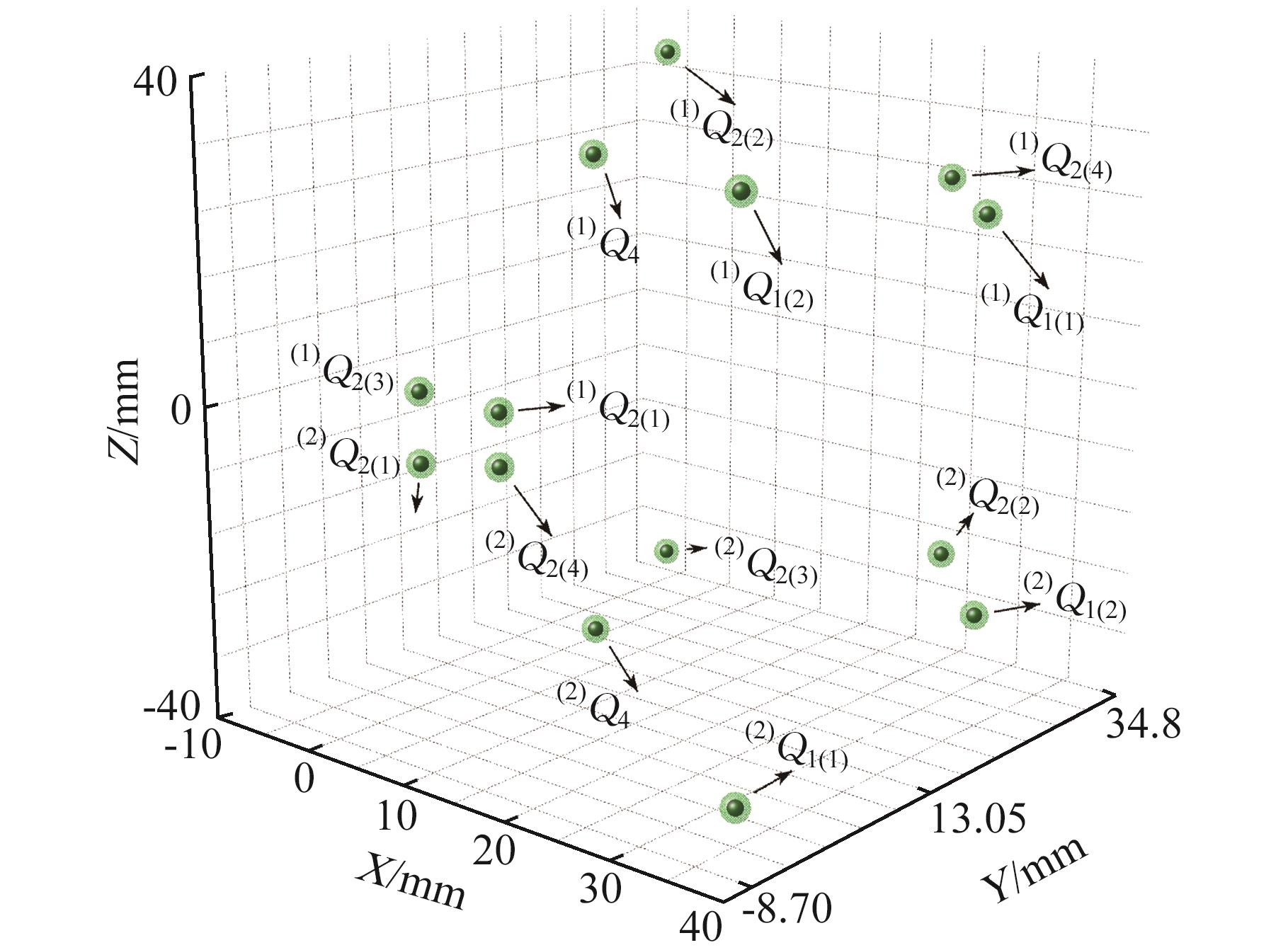
图6 理论计算和虚拟试验结果
Fig.6 Theoretical calculation and virtual test results
| 第1、5组解对称 | 第2、6组解对称 |
|---|---|
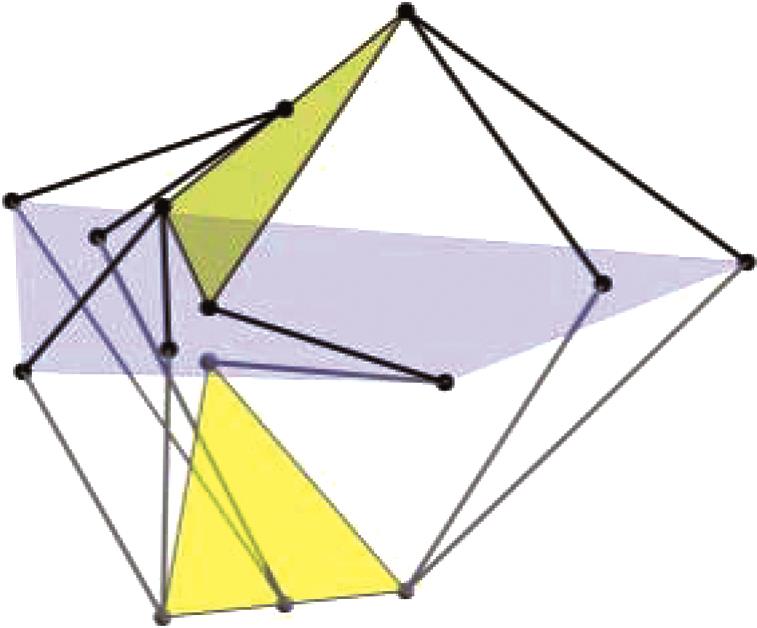 | 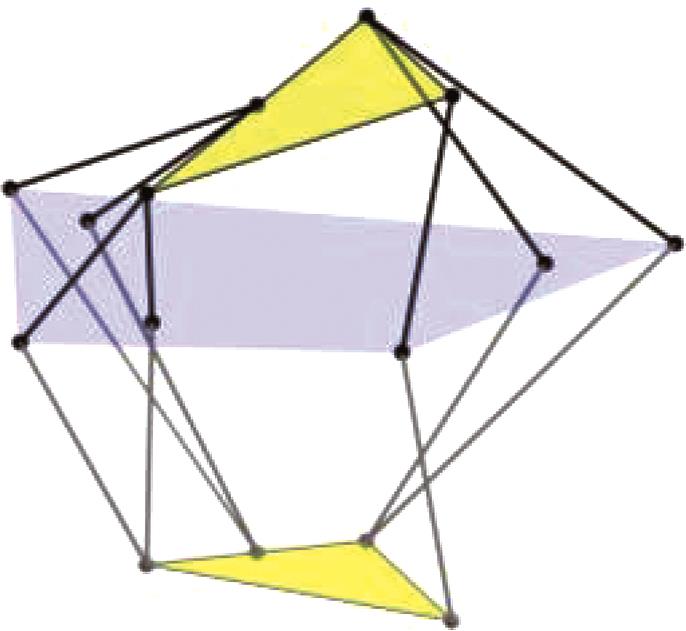 |
| 第3、7组解对称 | 第4、8组解对称 |
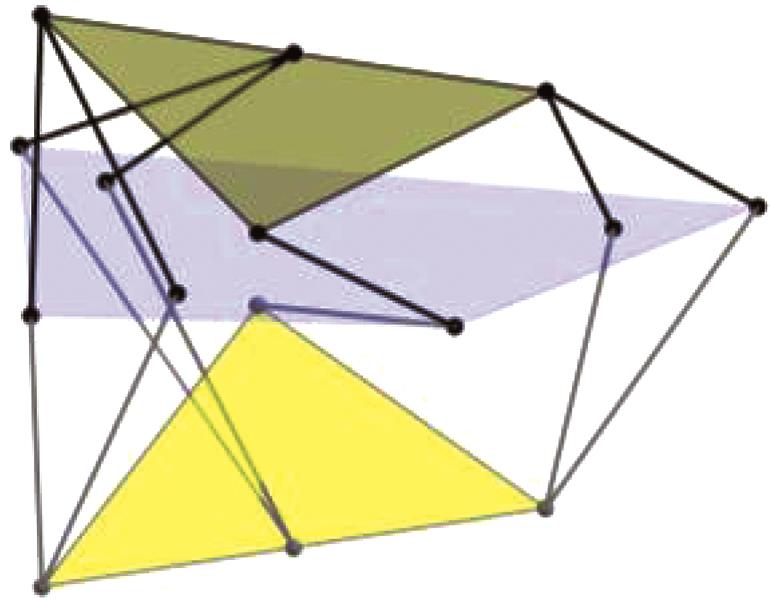 | 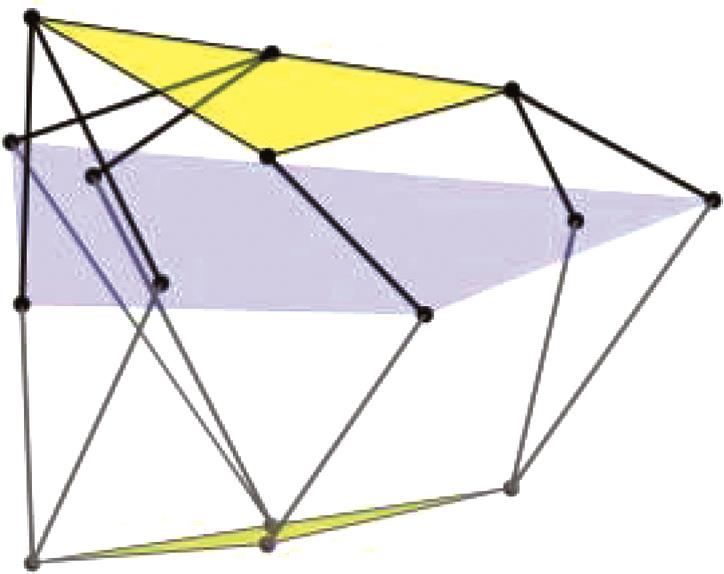 |
表3 机构位形简图
Tab.3 Schematic diagram of mechanism configuration
| 第1、5组解对称 | 第2、6组解对称 |
|---|---|
| |
| 第3、7组解对称 | 第4、8组解对称 |
| |
| 任意选取的数据/mm | 理论计算/mm | 试验测量/mm | |||||
|---|---|---|---|---|---|---|---|
| L1* | L3 | L3* | L4 | L4* | L1 | ||
| 1 | 35.322 97 | 43.1105 4 | 56.877 73 | 67.823 30 | 86.023 25 | 38.353 63 | 38.353 63 |
| 2 | 40.176 93 | 59.772 10 | 72.626 50 | 75.952 01 | 94.417 73 | 34.857 32 | 34.857 32 |
| 3 | 46.904 13 | 103.453 64 | 114.832 72 | 100.749 83 | 117.764 71 | 43.452 25 | 43.452 25 |
表4 理论计算与试验测量数据
Tab.4 Theoretical calculation and experimental measurement data
| 任意选取的数据/mm | 理论计算/mm | 试验测量/mm | |||||
|---|---|---|---|---|---|---|---|
| L1* | L3 | L3* | L4 | L4* | L1 | ||
| 1 | 35.322 97 | 43.1105 4 | 56.877 73 | 67.823 30 | 86.023 25 | 38.353 63 | 38.353 63 |
| 2 | 40.176 93 | 59.772 10 | 72.626 50 | 75.952 01 | 94.417 73 | 34.857 32 | 34.857 32 |
| 3 | 46.904 13 | 103.453 64 | 114.832 72 | 100.749 83 | 117.764 71 | 43.452 25 | 43.452 25 |
| aj | |
|---|---|
| b1 | |
| d1 | |
| a2 | |
| b2 | |
| d2 | |
| ae | |
| b3 | |
| d3 | |
| a4 | |
| bh | |
| d4 | |
| Bj | |
| Dj | |
| Be | |
| De | |
| A2 | |
| B2 | |
| D2 |
表5 J 中部分元素的解析式
Tab.5 Some elements in J
| aj | |
|---|---|
| b1 | |
| d1 | |
| a2 | |
| b2 | |
| d2 | |
| ae | |
| b3 | |
| d3 | |
| a4 | |
| bh | |
| d4 | |
| Bj | |
| Dj | |
| Be | |
| De | |
| A2 | |
| B2 | |
| D2 |
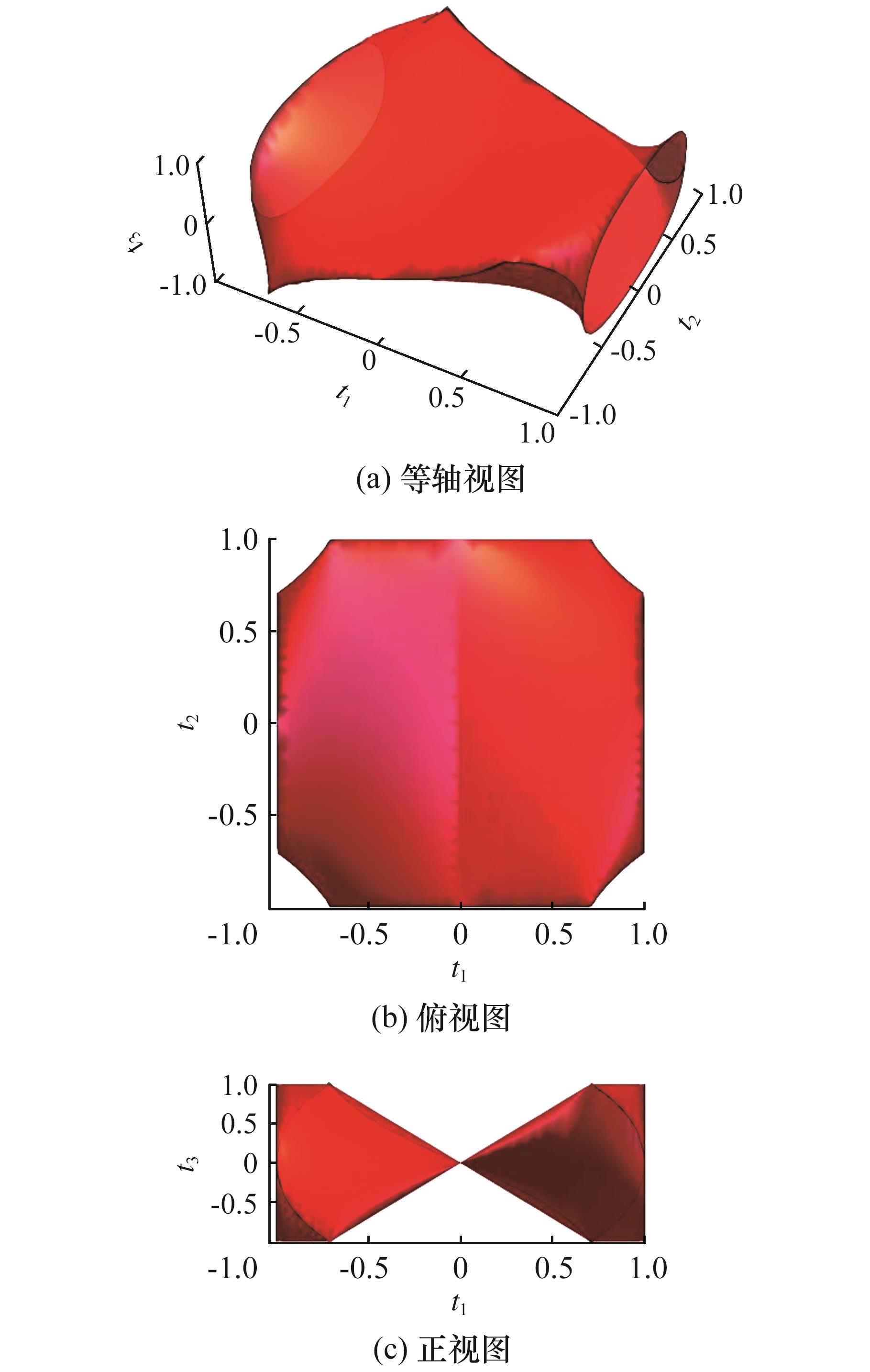
图7 姿态奇异曲面
Fig.7 Orientation singular surface
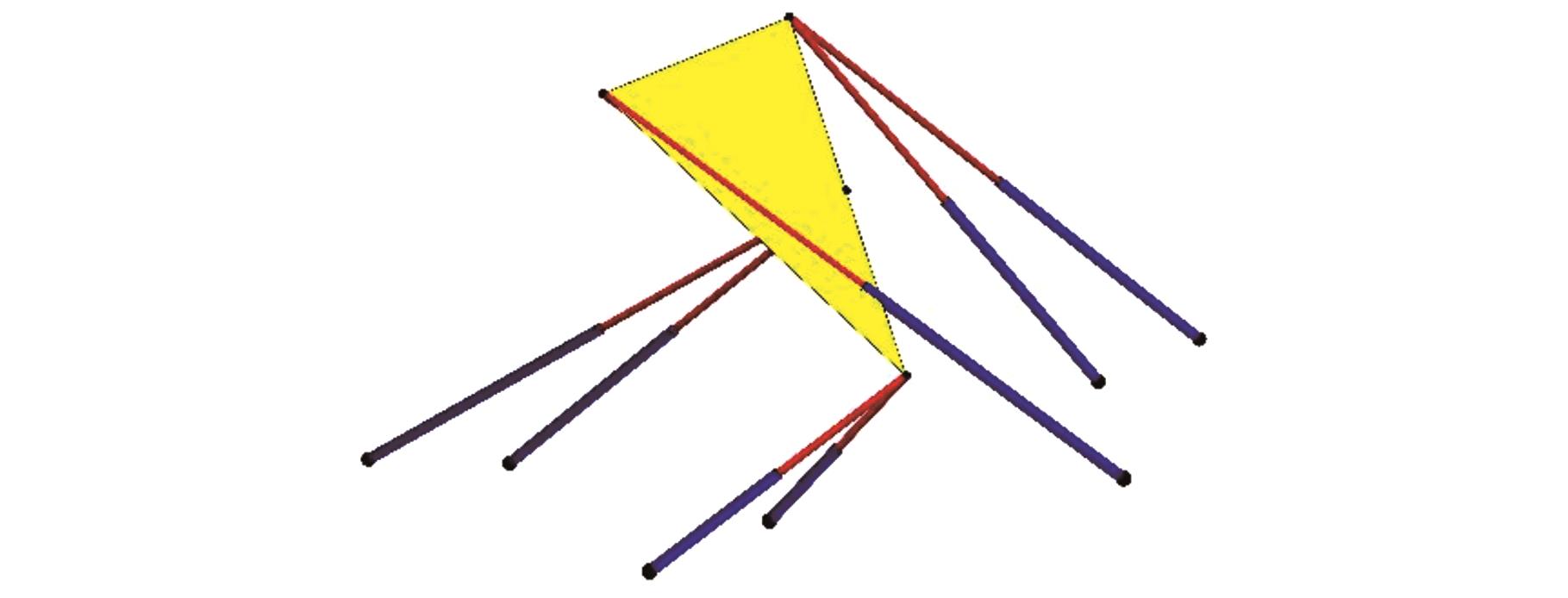
图8 姿态奇异位形
Fig.8 Orientation singular configuration
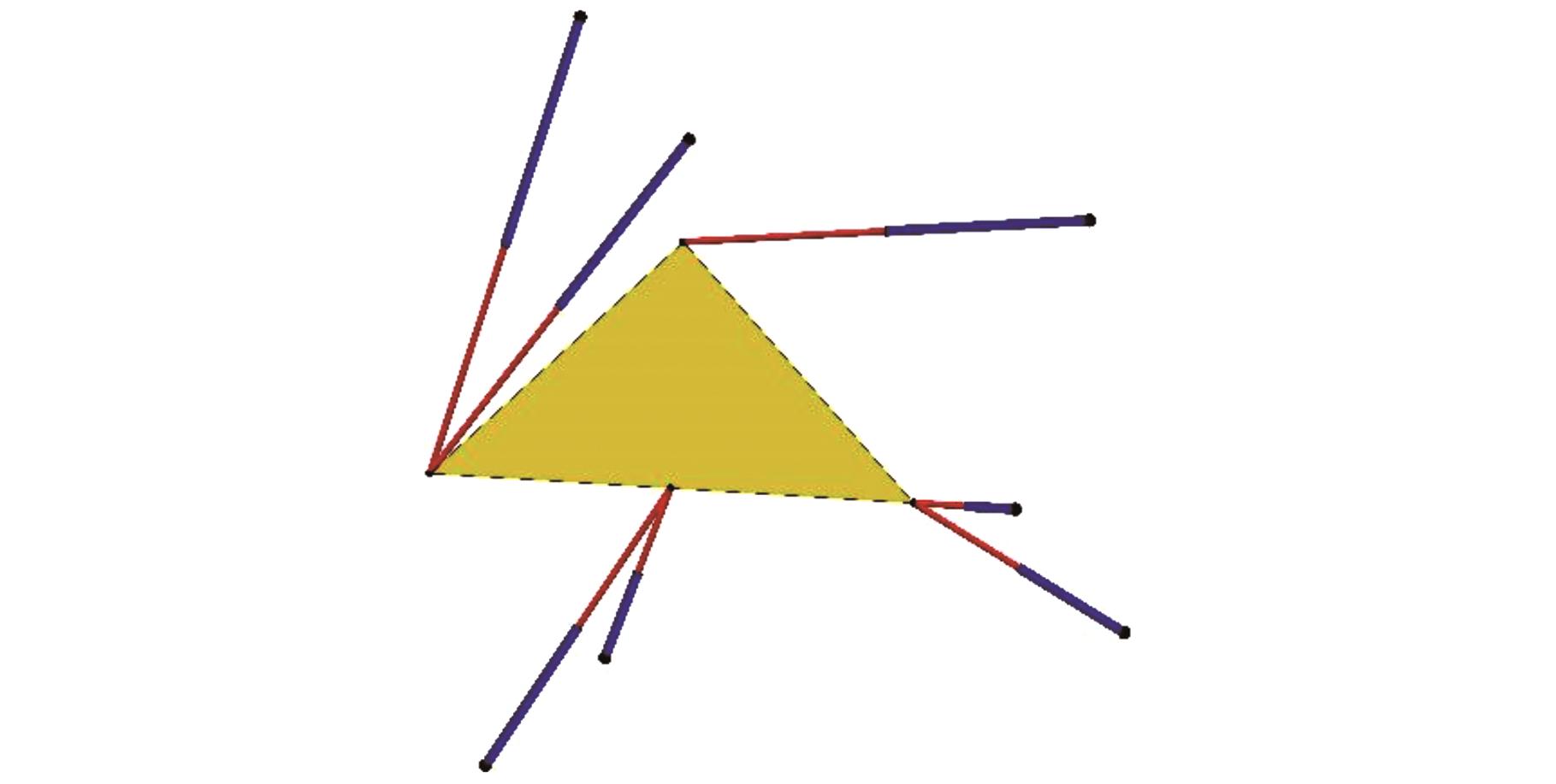
图9 位置奇异位形
Fig.9 Position singular configuration
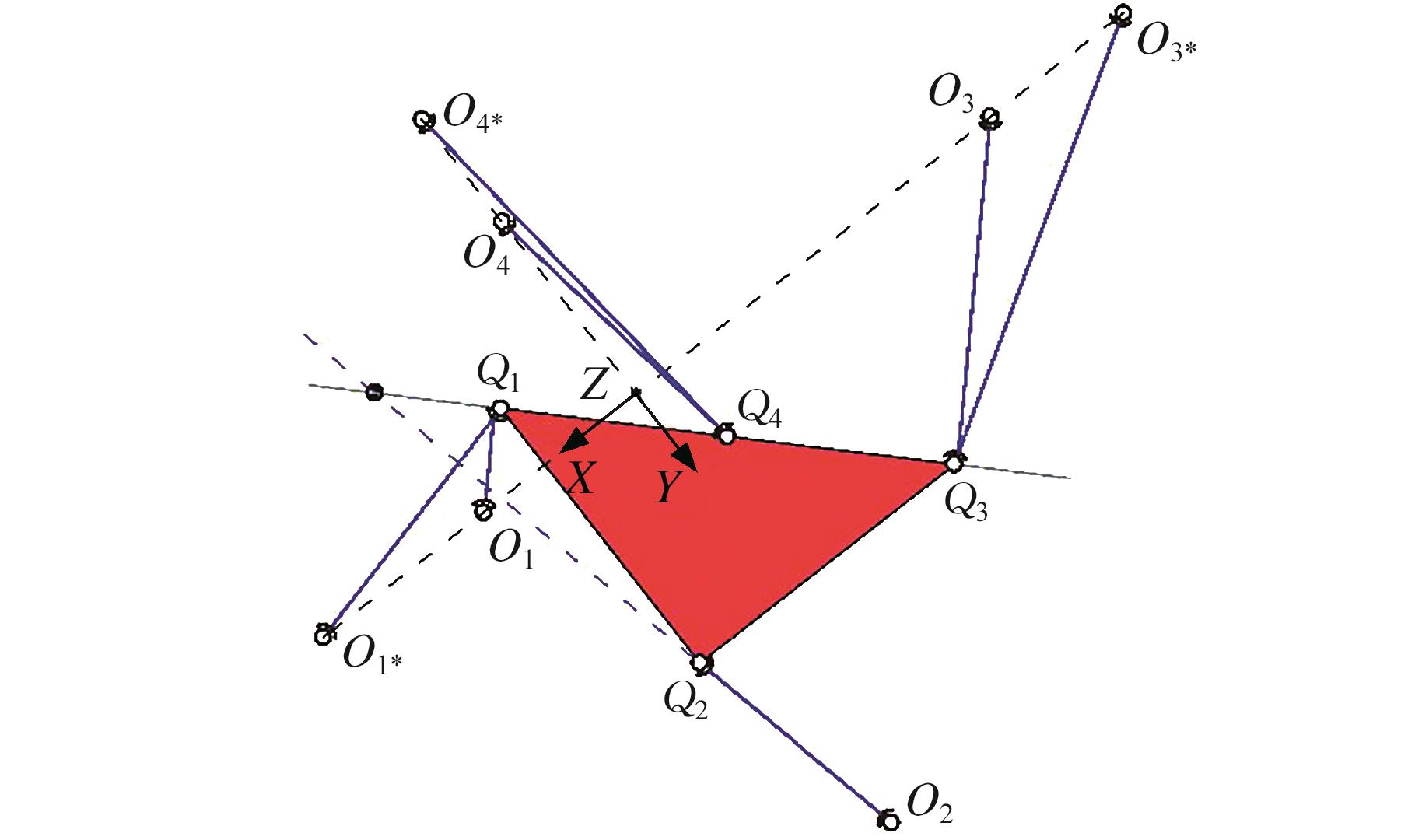
图10 第1种Hunt奇异位形
Fig.10 The first Hunt’s singularity
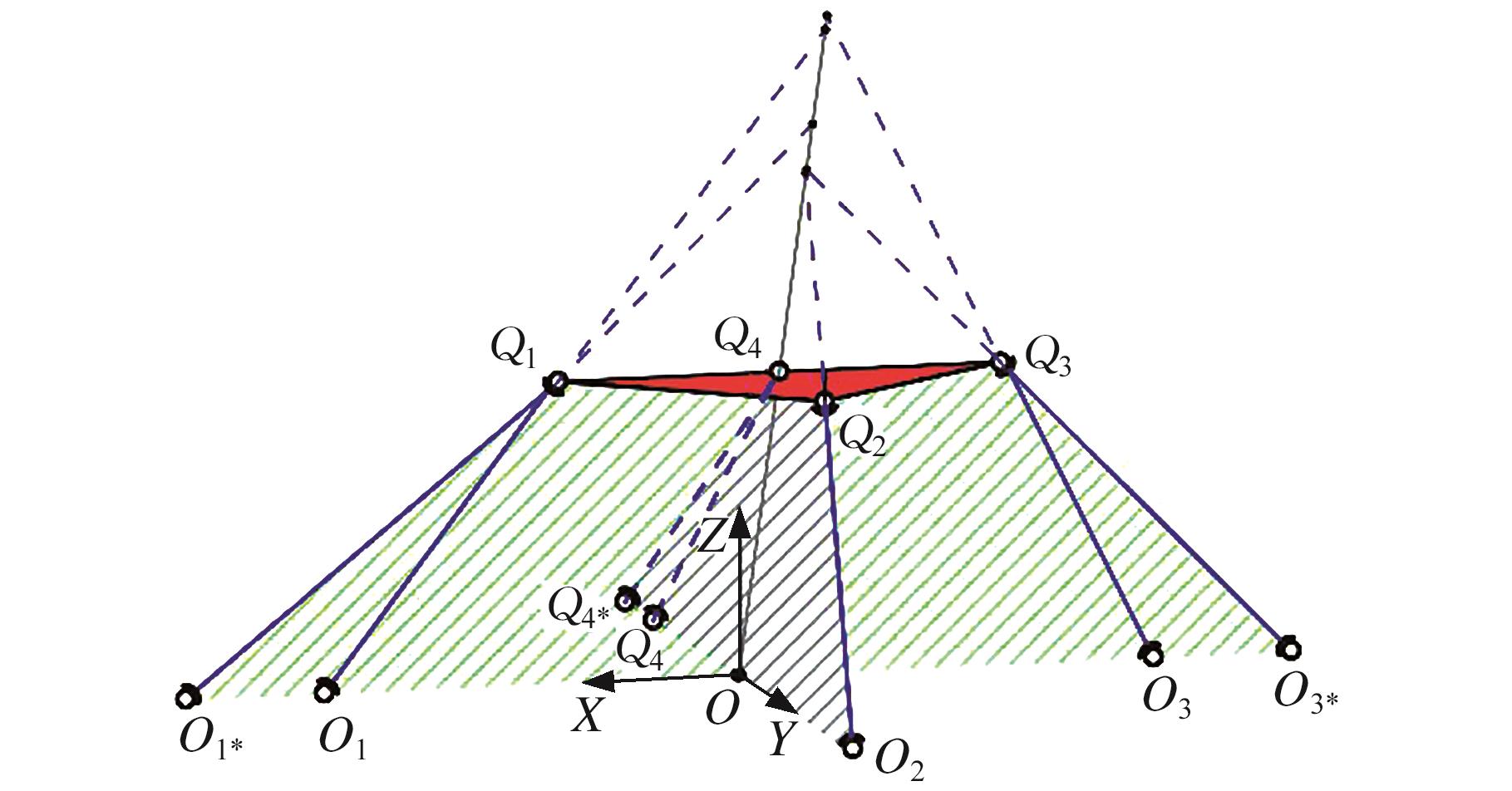
图11 第2种Hunt奇异位形
Fig.11 The second Hunt’s singularity
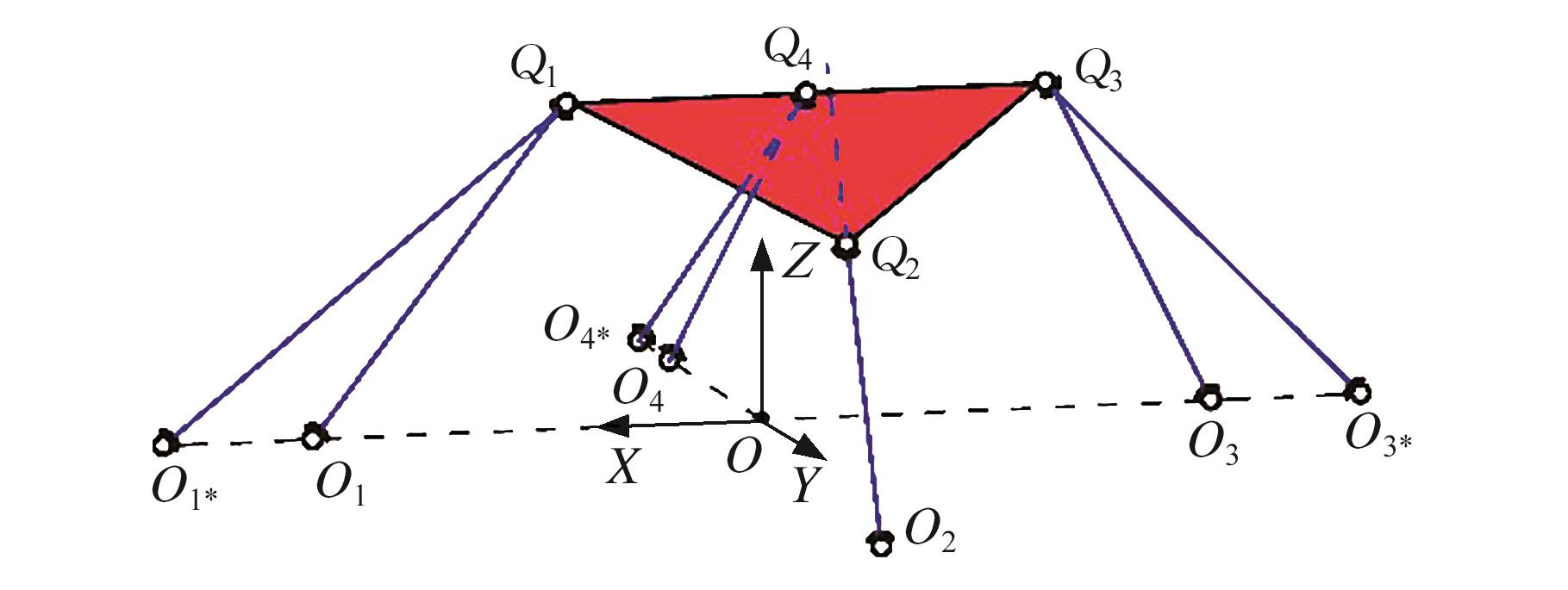
图12 第3种Hunt奇异位形
Fig.12 The third Hunt’s singularity
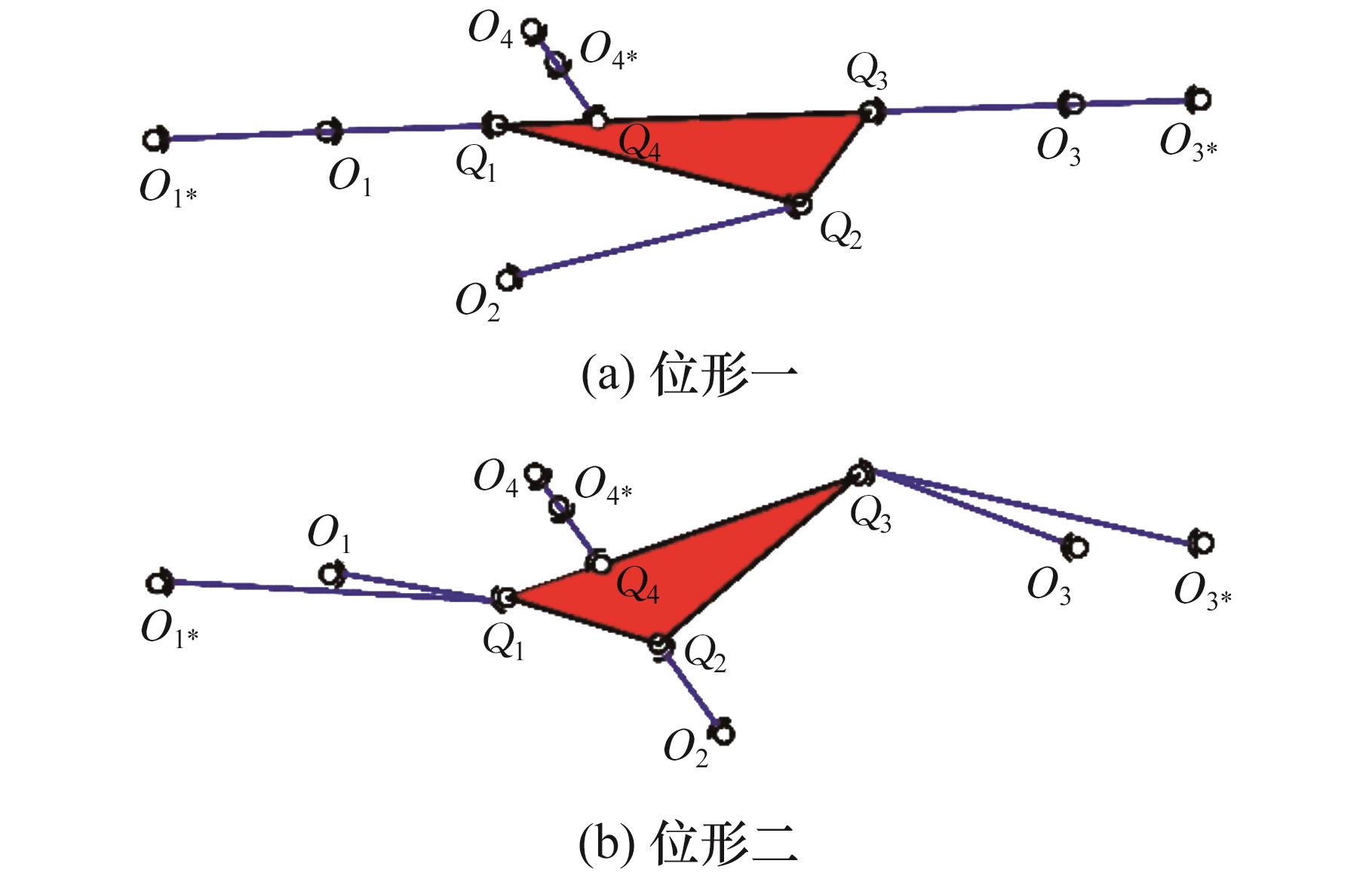
图13 共线驱动奇异位形
Fig.13 Colinearly actuation singularity
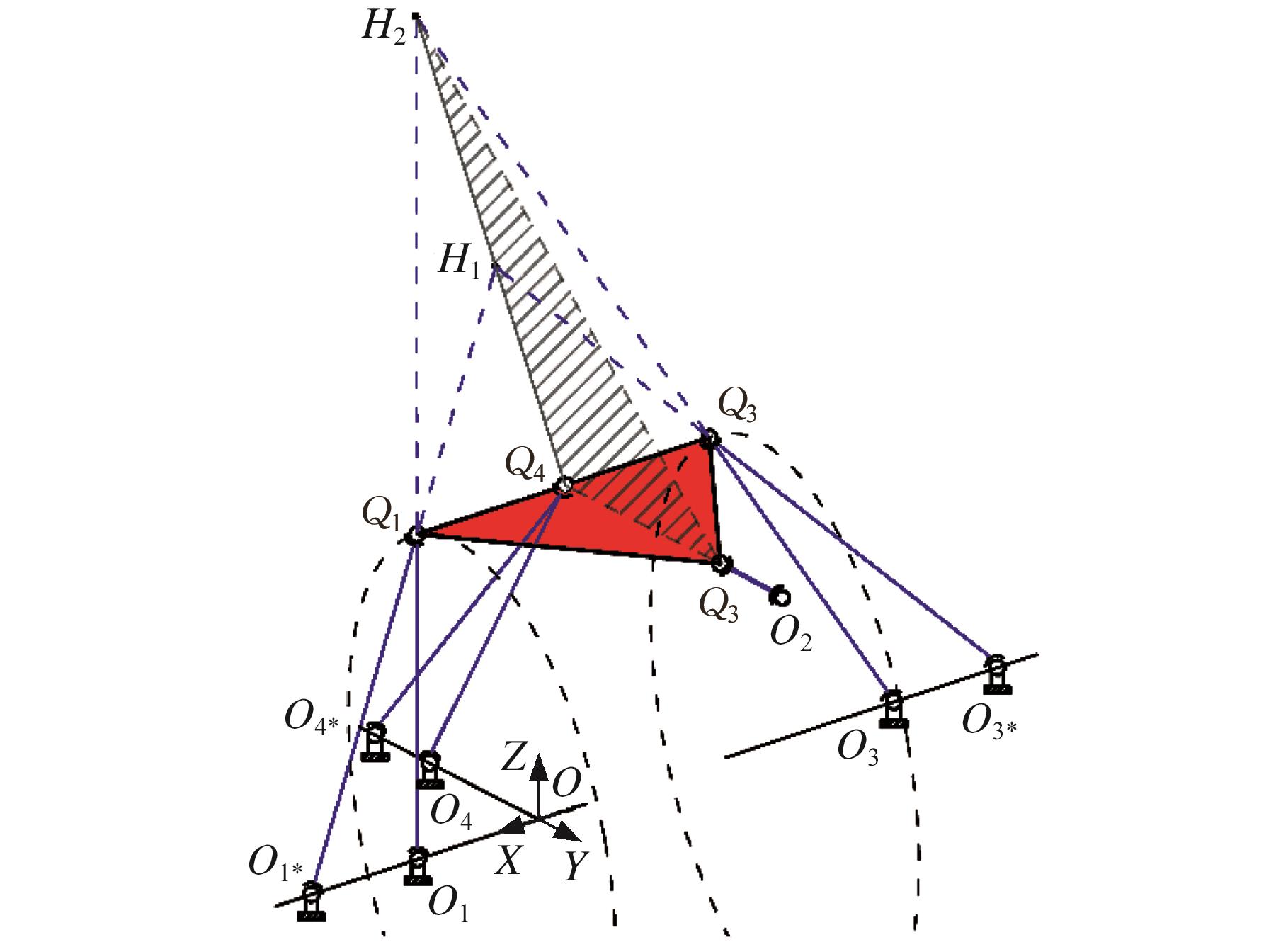
图14 点Q1、Q3的运动轨迹
Fig.14 Points Q1、Q3 trajectory of motion
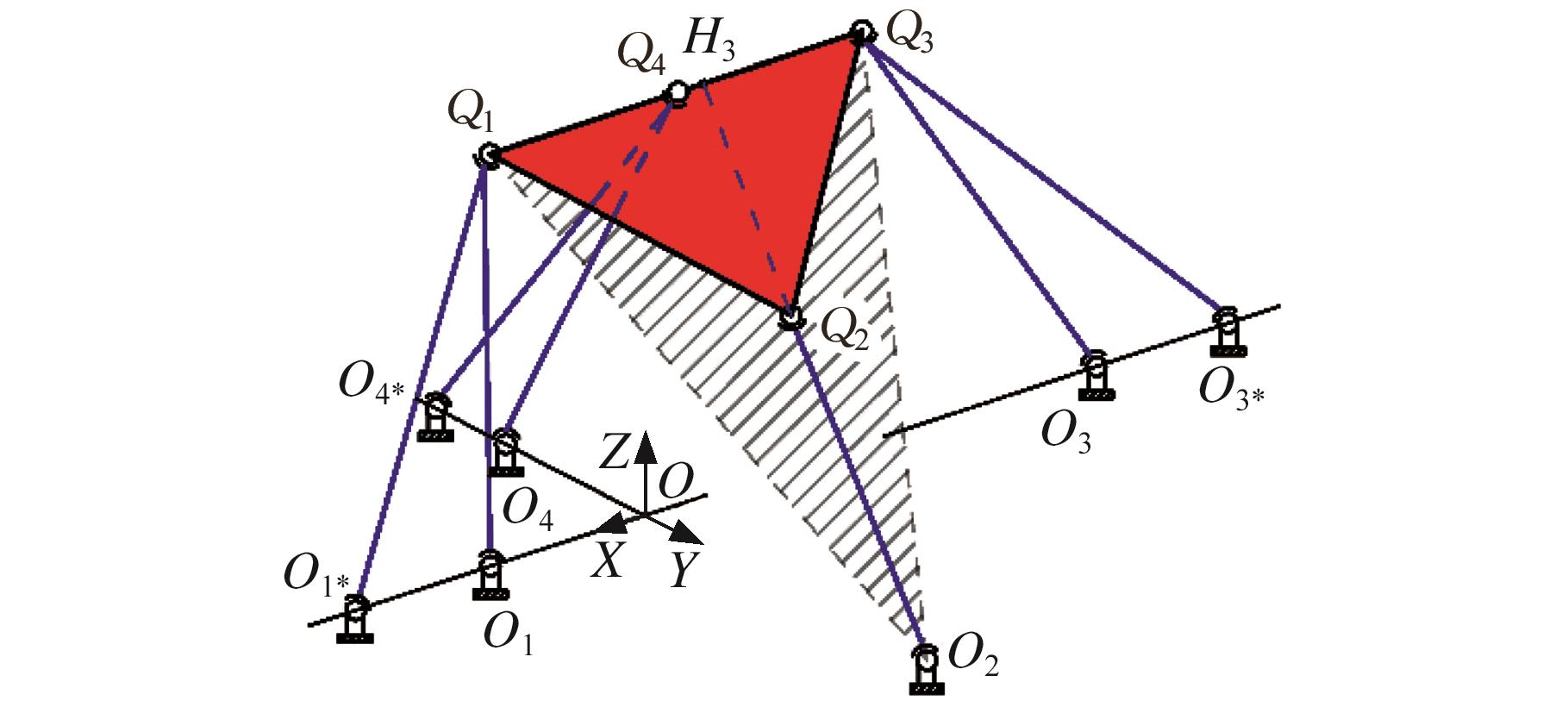
图15 Q2点存在唯一解
Fig.15 Unique solution at point Q2
| 四组位置正解 | 一组位置正解 | ||
|---|---|---|---|
| 构型 | 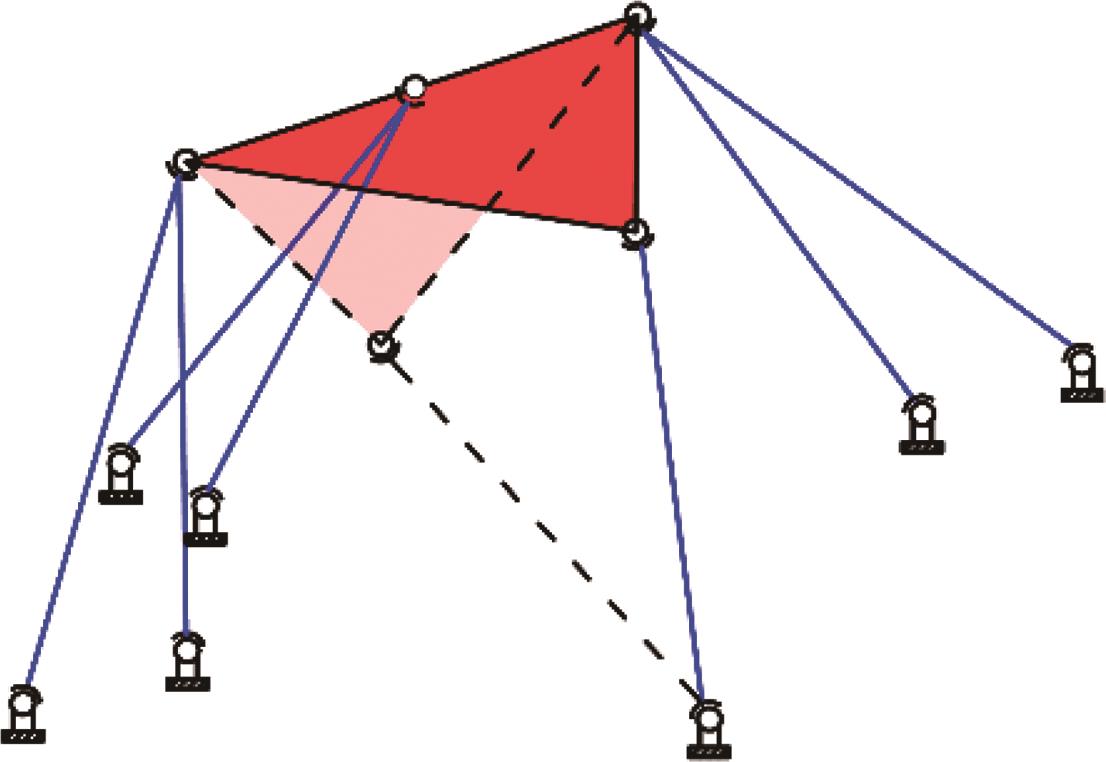 | 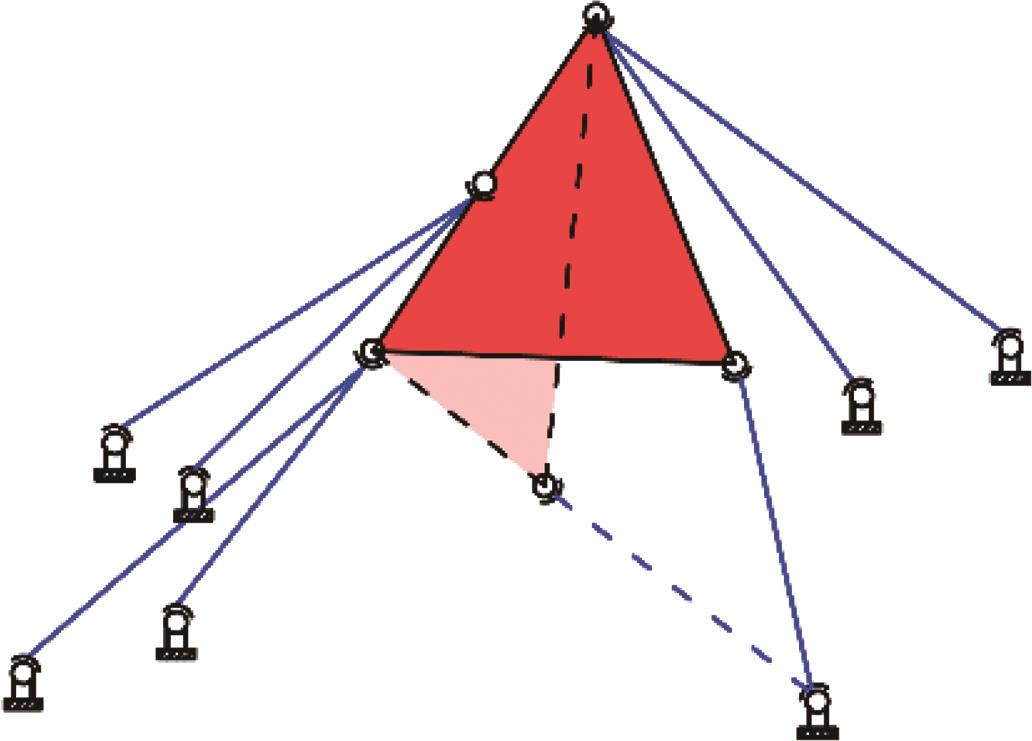 | 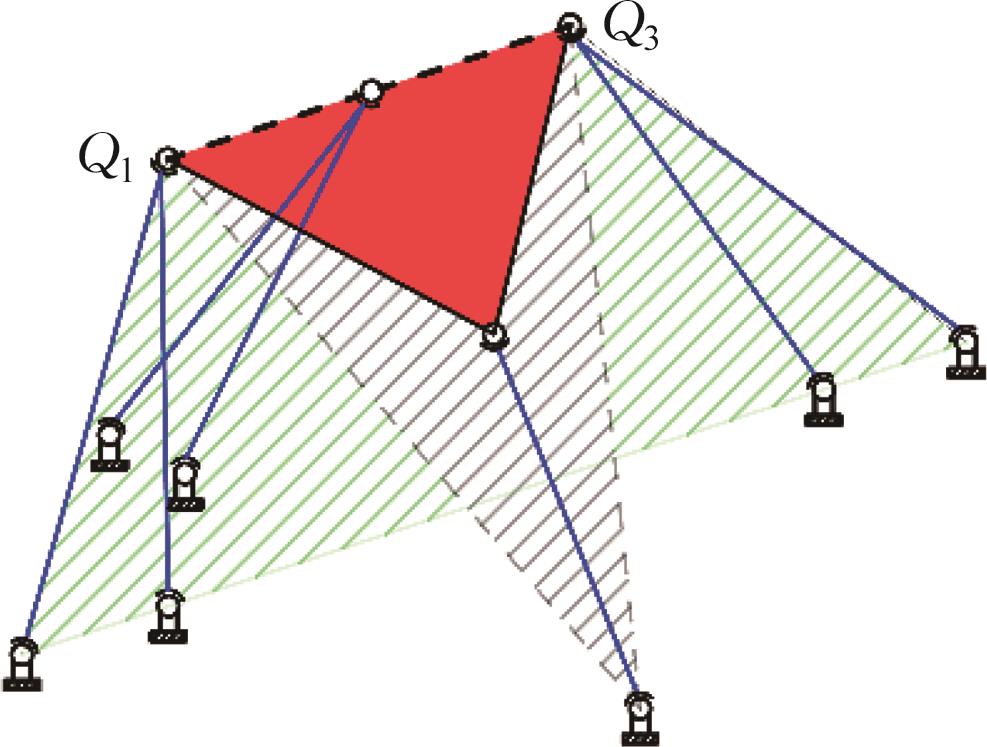 |
| 奇异 | 无奇异位形 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
| 两组位置正解 | |||
| 构型 | 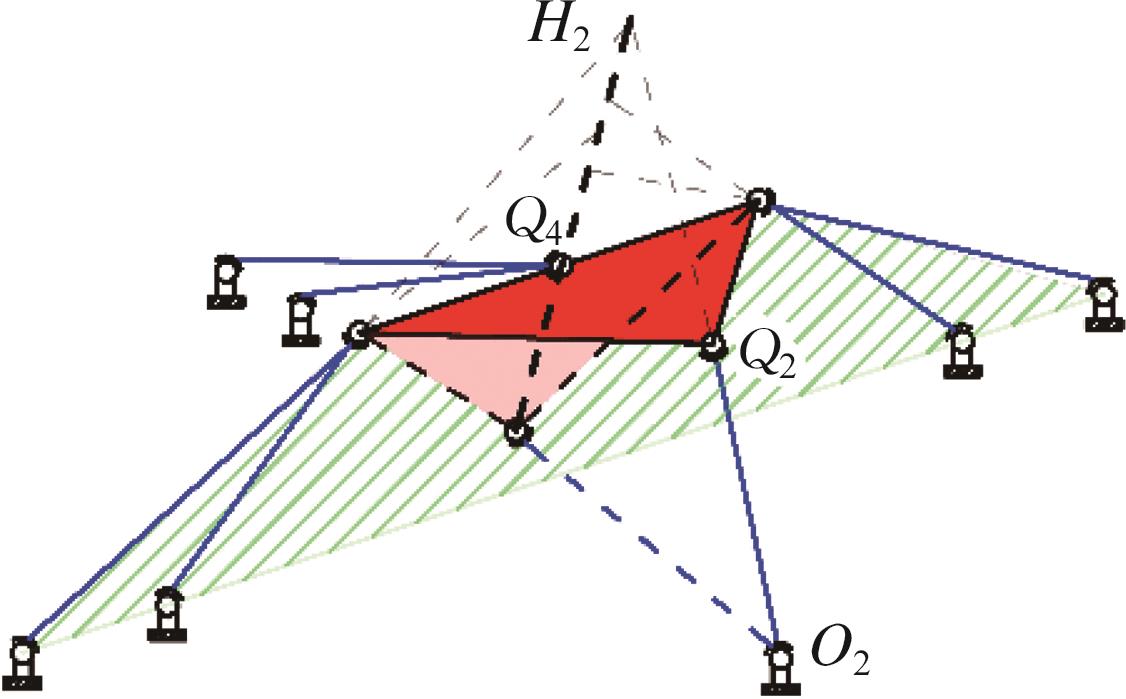 | 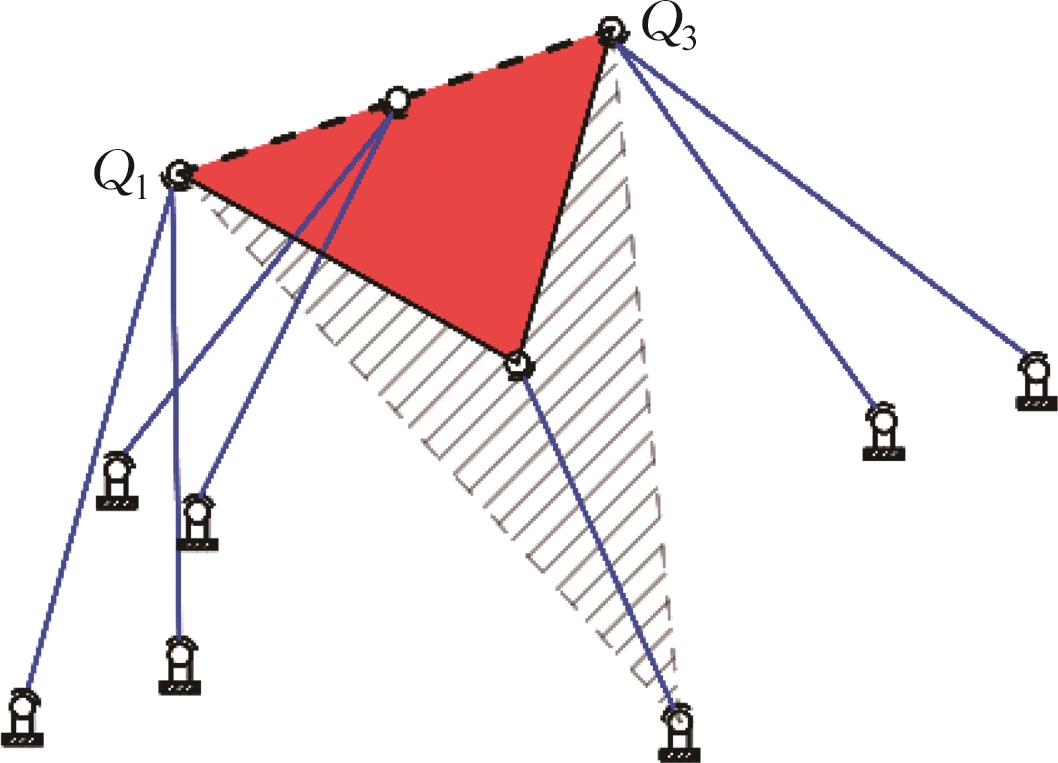 | 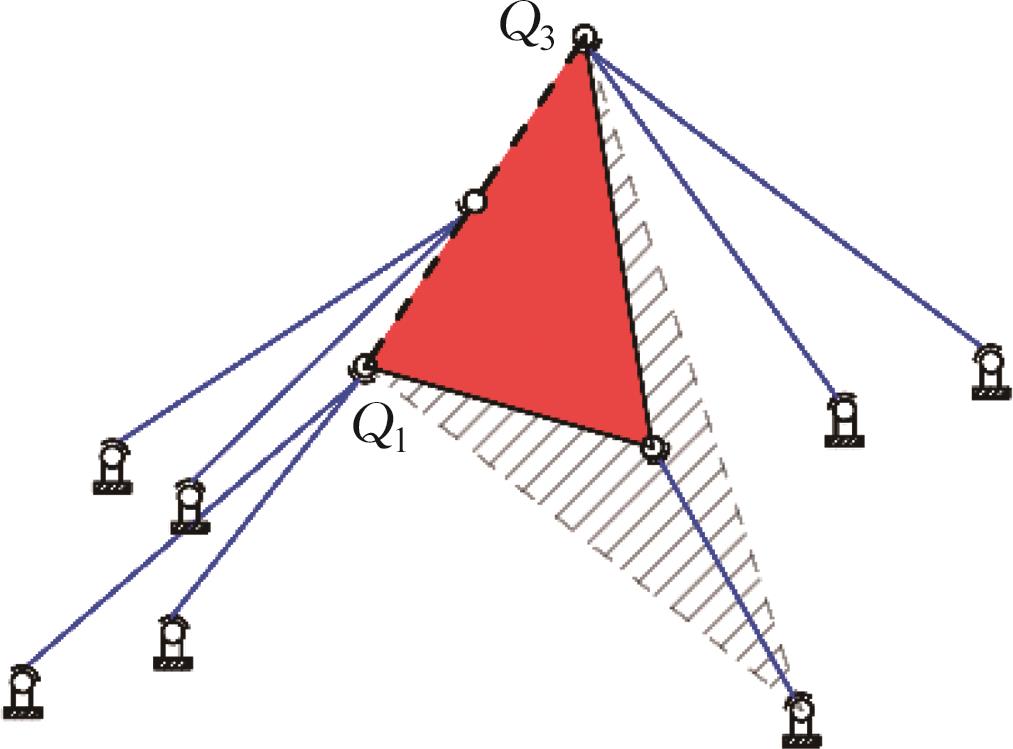 |
| 奇异 | 若O2点位于面H2Q4Q2上,则为Hunt奇异,Q4H2为瞬时旋转轴 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
表6 位置正解个数与奇异性的对应关系
Tab.6 Relationship between the number of forward position solutions and singularity
| 四组位置正解 | 一组位置正解 | ||
|---|---|---|---|
| 构型 | | | |
| 奇异 | 无奇异位形 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
| 两组位置正解 | |||
| 构型 | | | |
| 奇异 | 若O2点位于面H2Q4Q2上,则为Hunt奇异,Q4H2为瞬时旋转轴 | Hunt奇异,Q1Q3为瞬时旋转轴 | |
| [1] | 谢志江, 程清, 丁军, 等. 双支链六自由度并联机构尺度设计与性能分析[J]. 中国机械工程, 2022, 33(14):1680-1690. |
| XIE Zhijiang, CHENG Qing, DING Jun, et al. Dimensional Design and Performance Analysis of a 6-DOF Parallel Manipulator with Two Limbs[J]. China Mechanical Engineering, 2022, 33(14):1680-1690. | |
| [2] | SABATÉ N, ESQUIVEL J P, SANTANDER J, et al. New Approach for Batch Microfabrication of Silicon-based Micro Fuel Cells[J]. Microsystem Technologies, 2014, 20(2):341-348. |
| [3] | YOU Jingjing, XI Fengfeng, SHEN Huiping, et al. A Novel Stewart-type Parallel Mechanism with Topological Reconfiguration:Design, Kinematics and Stiffness Evaluation[J]. Mechanism and Machine Theory, 2021, 162:104329. |
| [4] | 尤晶晶, 符周舟, 吴洪涛, 等. 12-6台体型Stewart冗余并联机构正向运动学研究[J]. 农业机械学报, 2017, 48(12):395-402. |
| YOU Jingjing, FU Zhouzhou, WU Hongtao, et al. Forward Kinematics of General 12-6 Stewart Redundant Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12):395-402. | |
| [5] | ZHOU Wanyong, CHEN Wuyi, LIU Huadong, et al. A New Forward Kinematic Algorithm for a General Stewart Platform[J]. Mechanism and Machine Theory, 2015, 87:177-190. |
| [6] | YANG Xiaolong, WU Hongtao, LI Yao, et al. A Dual Quaternion Solution to the Forward Kinematics of a Class of Six-DOF Parallel Robots with Full or Reductant Actuation[J]. Mechanism and Machine Theory, 2017, 107:27-36. |
| [7] | 沈惠平, 仲锐, 李菊, 等. 运动副分布顺序对并联机构运动学与动力学性能的影响[J]. 农业机械学报, 2023, 54(7):412-426. |
| SHEN Huiping, ZHONG Rui, LI Ju, et al. Influence of Different Distribution Order of Joints on Kinematic and Dynamic Performance of Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(7):412-426. | |
| [8] | ZHAO Fuqun, GUO Sheng, ZHANG Chengyu, et al. Singularity Analysis and Dexterity Performance on a Novel Parallel Mechanism with Kinematic Redundancy[J]. International Journal of Advanced Robotic Systems, 2019, 16(5):1729881419872641. |
| [9] | LACOMBE J, GOSSELIN C. Singularity Analysis of a Kinematically Redundant (6+2)-DOF Parallel Mechanism for General Configurations[J]. Mechanism and Machine Theory, 2022, 176:105015. |
| [10] | MONSARRAT B, GOSSELIN C M. Singularity Analysis of a Three-leg Six-degree-of-freedom Parallel Platform Mechanism Based on Grassmann Line Geometry[J]. The International Journal of Robotics Research, 2001, 20(4):312-328. |
| [11] | CHENG Shili, JI Ping. Geometric Algebra Approach to Analyzing the Singularity of Six-DOF Parallel Mechanism[J]. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2019, 13(4):JAMDSM0076. |
| [12] | YANG Tingli, LIU Anxin, SHEN Huiping, et al. On the Correctness and Strictness of the Position and Orientation Characteristic Equation for Topological Structure Design of Robot Mechanisms[J]. Journal of Mechanisms and Robotics, 2013, 5(2):021009. |
| [13] | 沈惠平, 朱小蓉, 尹洪波, 等. 并联机构的结构降耦原理及其设计方法[J]. 机械工程学报, 2016, 52(23):102-113. |
| SHEN Huiping, ZHU Xiaorong, YIN Hongbo, et al. Principle and Design Method for Structure Coupling-reducing of Parallel Mechanisms[J]. Journal of Mechanical Engineering, 2016, 52(23):102-113. | |
| [14] | MA O, ANGELES J. Architecture Singularities of Platform Manipulators[C]∥Proceedings of 1991 IEEE International Conference on Robotics and Automation. Sacramento, 1991:1542-1547. |
| [15] | HUNT K H. Structural Kinematics of In-parallel-Actuated Robot-arms[J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1983, 105(4):705-712. |
| [16] | FICHTER E F. A Stewart-platform Based Manipulator:General Theory and Practical Construction[J]. International Journal of Robotics Research, 1986, 5(2):157-182. |
| [1] | 李明磊, 贾育秦, 张学良, 刘丽琴, 杜娟, 温淑花, 兰国生. 基于多目标差异演化算法的并联机构结构优化 [J]. J4, 201016, 21(16): 1915-1920. |
| [2] | 鲁开讲, 师俊平, 张锋涛. 平面三自由度并联机构动力学优化设计 [J]. J4, 201016, 21(16): 1926-1931. |
| [3] | 朱潇, 沈惠平, 李菊, 李涛, 叶鹏达, 朱伟. 可轮换用动平台三自由度并联机构的拓扑设计及其性能分析[J]. 中国机械工程, 2026, 37(1): 114-125. |
| [4] | 李菊, 郭跃, 沈惠平, 孟庆梅, 顾晓阳. 并联机构多重拓扑降耦的优化原理与一般方法[J]. 中国机械工程, 2025, 36(08): 1700-1712. |
| [5] | 赵星宇, 赵铁石, 许博, 刘相权, 秦宇飞. 并联式混合驱动机构运动学和传递性能分析[J]. 中国机械工程, 2025, 36(08): 1728-1739. |
| [6] | 蒲志新, 郭建伟, 潘玉奇, 白杨溪. 2PPaPaR并联机构性能分析及优化设计[J]. 中国机械工程, 2023, 34(19): 2304-2312. |
| [7] | 沈惠平, 李霞, 李菊, 李涛, 孟庆梅, 吴广磊. 约束支链或无约束支链对并联机构运动学与刚度性能的影响——以两个部分运动解耦的新型三平移并联机构的设计、分析及其优选为例[J]. 中国机械工程, 2023, 34(13): 1533-1549. |
| [8] | 杜中秋, 沈惠平, 孟庆梅, 李涛, 杨廷力. 运动解耦且正解符号化的8R两平移空间并联机构的设计与性能分析[J]. 中国机械工程, 2023, 34(12): 1425-1435. |
| [9] | 陈恒通, 王晓光, 江海龙, 林麒. 两种典型六自由度支撑机构大迎角运动特性分析与对比[J]. 中国机械工程, 2023, 34(06): 641-649. |
| [10] | 刘繁茂, 廖灿灿, 张原愿, 莫寒. 新型碟式太阳能聚光器跟踪机构优化设计[J]. 中国机械工程, 2023, 34(04): 395-403. |
| [11] | 董成林, 蔡龙奇, 李毅, 路彤, 张路科. 基于并联机构的三维动力吸振器各向同性设计及减振特性研究[J]. 中国机械工程, 2023, 34(03): 307-313. |
| [12] | 汪满新, 李兰彬, 李正亮, 刘海涛, 黄田. 一类1T2R并联机构拓扑结构综合及优选[J]. 中国机械工程, 2022, 33(20): 2395-2402. |
| [13] | 刘文兰, 于海霞, 瞿怀宇, 马鹏飞, 高小钧, 王建森. 叠加Ⅱ级杆组的正铲液压挖掘机工作机构型综合[J]. 中国机械工程, 2022, 33(16): 1919-1927. |
| [14] | 谢志江, 程清, 丁军, 何苗, 范乃吉, 吴小勇. 双支链六自由度并联机构尺度设计与性能分析[J]. 中国机械工程, 2022, 33(14): 1680-1690. |
| [15] | 王一熙, 沈惠平, 陈谱, 吴广磊. 基于运动学、刚度和动力学性能的并联机构有序递进三级优化设计及其应用[J]. 中国机械工程, 2022, 33(13): 1560-1575,1621. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||