ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (08): 1700-1712.DOI: 10.3969/j.issn.1004-132X.2025.08.006
李菊( ), 郭跃, 沈惠平(), 孟庆梅, 顾晓阳
), 郭跃, 沈惠平(), 孟庆梅, 顾晓阳
收稿日期:2024-07-18
出版日期:2025-08-25
发布日期:2025-09-18
通讯作者:
沈惠平
作者简介:李 菊,女,1981 年生,副教授、博士。研究方向为并联机器人、机电一体化等。 E-mail:wangju0209@163.com。基金资助:
Ju LI(), Yue GUO, Huiping SHEN(), Qinmei MENG, Xiaoyang GU
Received:2024-07-18
Online:2025-08-25
Published:2025-09-18
Contact:
Huiping SHEN
摘要:
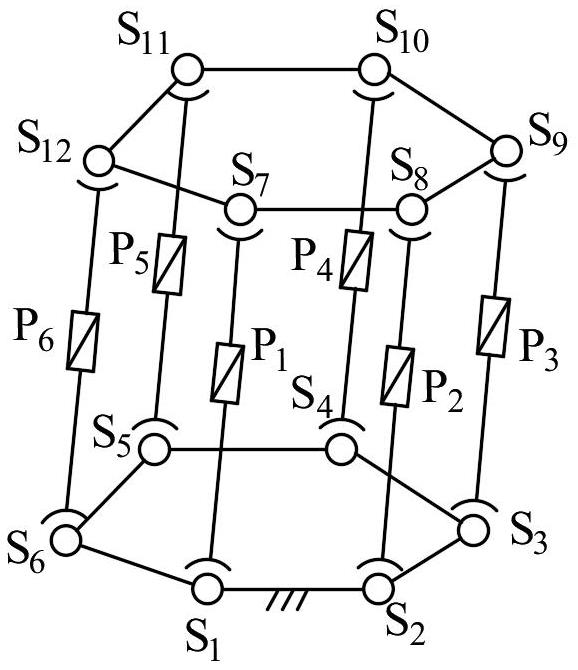
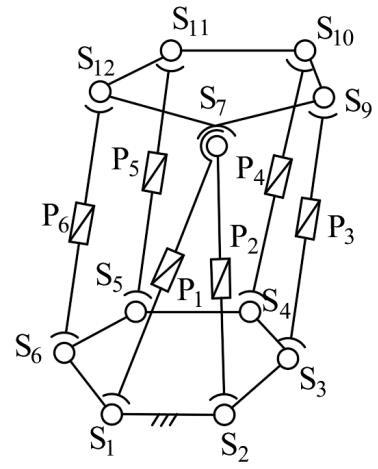
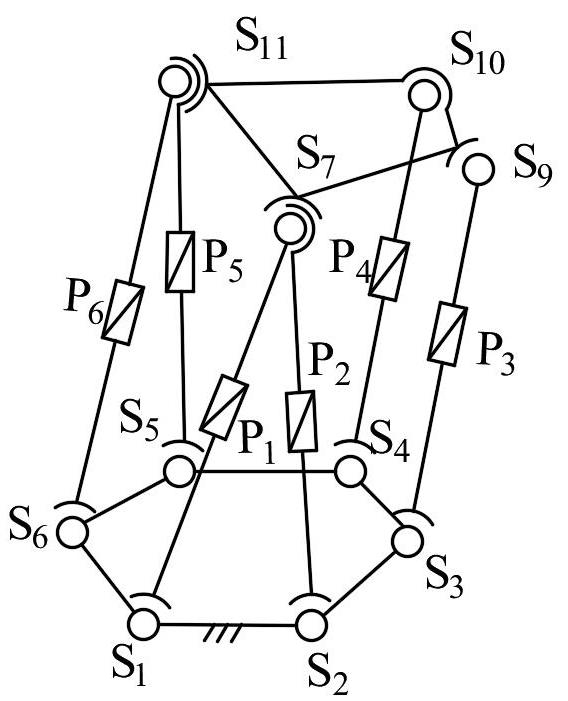
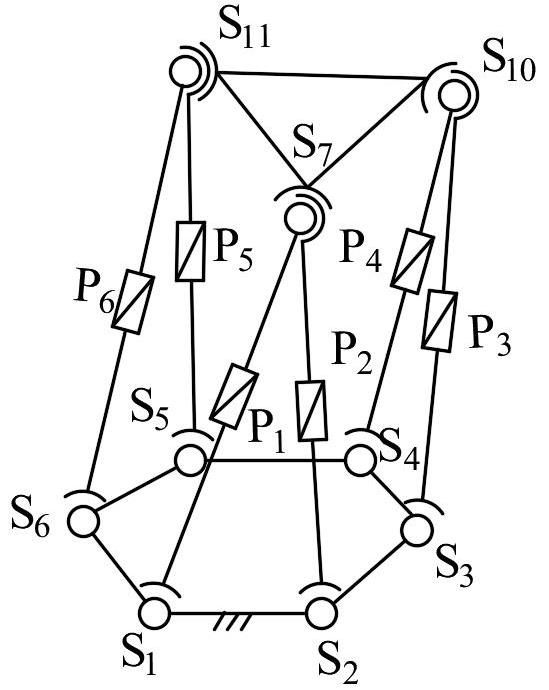
现有的并联机构型综合方法都仅以基本功能(DOF、POC)为设计目标,综合出的并联机构的耦合度一般较高(k≥2),致使其运动学正解求解及其后续研究(运动学、动平衡及动力学分析等)较复杂,影响了并联机构在制造业中的应用。提出了以降低机构耦合度为目标的并联机构多重拓扑降耦优化原理与方法。首先以6-DOF三平移三转动6-6R 无约束并联机构(耦合度k=4)为例,详细阐述并联机构多重拓扑降耦优化方法及其应用,并依次逐渐优化得到耦合度k=3,2,1,0的6-DOF 3T3R无约束并联机构;然后阐述了典型6-DOF Stewart-Gough平台并联机构的多重拓扑降耦优化过程,并得到相应的拓扑优化构型,便于进行这些机构的运动学/动力学建模与性能求解与分析。研究结果为其他多回路复杂并联机构的拓扑降耦优化提供了启示和方向。
中图分类号:
李菊, 郭跃, 沈惠平, 孟庆梅, 顾晓阳. 并联机构多重拓扑降耦的优化原理与一般方法[J]. 中国机械工程, 2025, 36(08): 1700-1712.
Ju LI, Yue GUO, Huiping SHEN, Qinmei MENG, Xiaoyang GU. Optimization Principle and General Method for Multiple Topology Decoupling of Parallel Mechanisms[J]. China Mechanical Engineering, 2025, 36(08): 1700-1712.
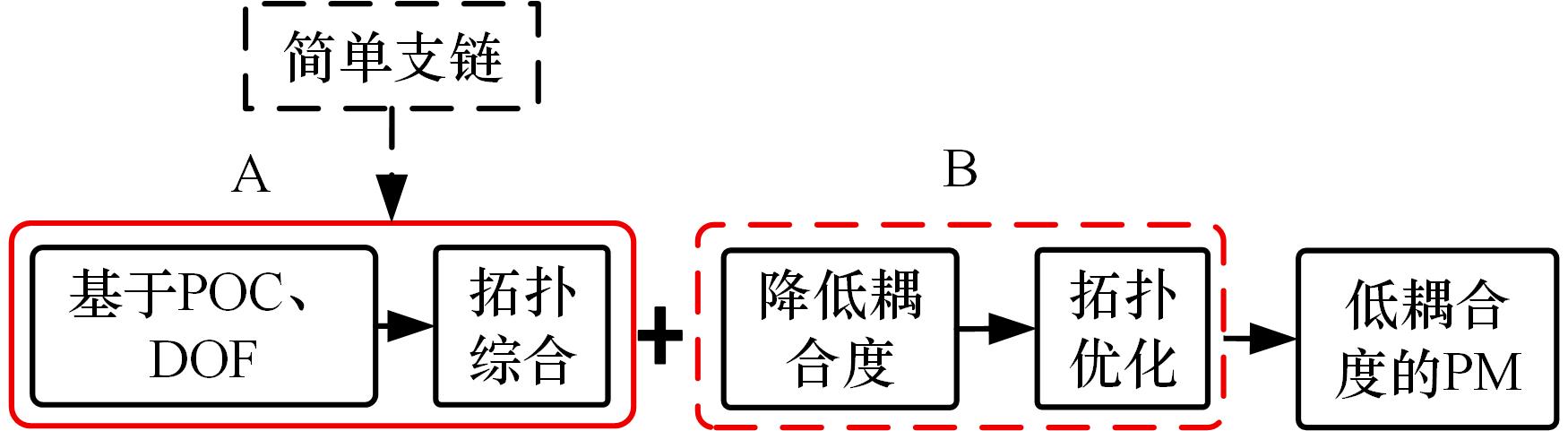
图1 并联机构的拓扑综合及其拓扑降耦优化
Fig.1 Topological synthesis and topological decoupling optimization of parallel mechanisms
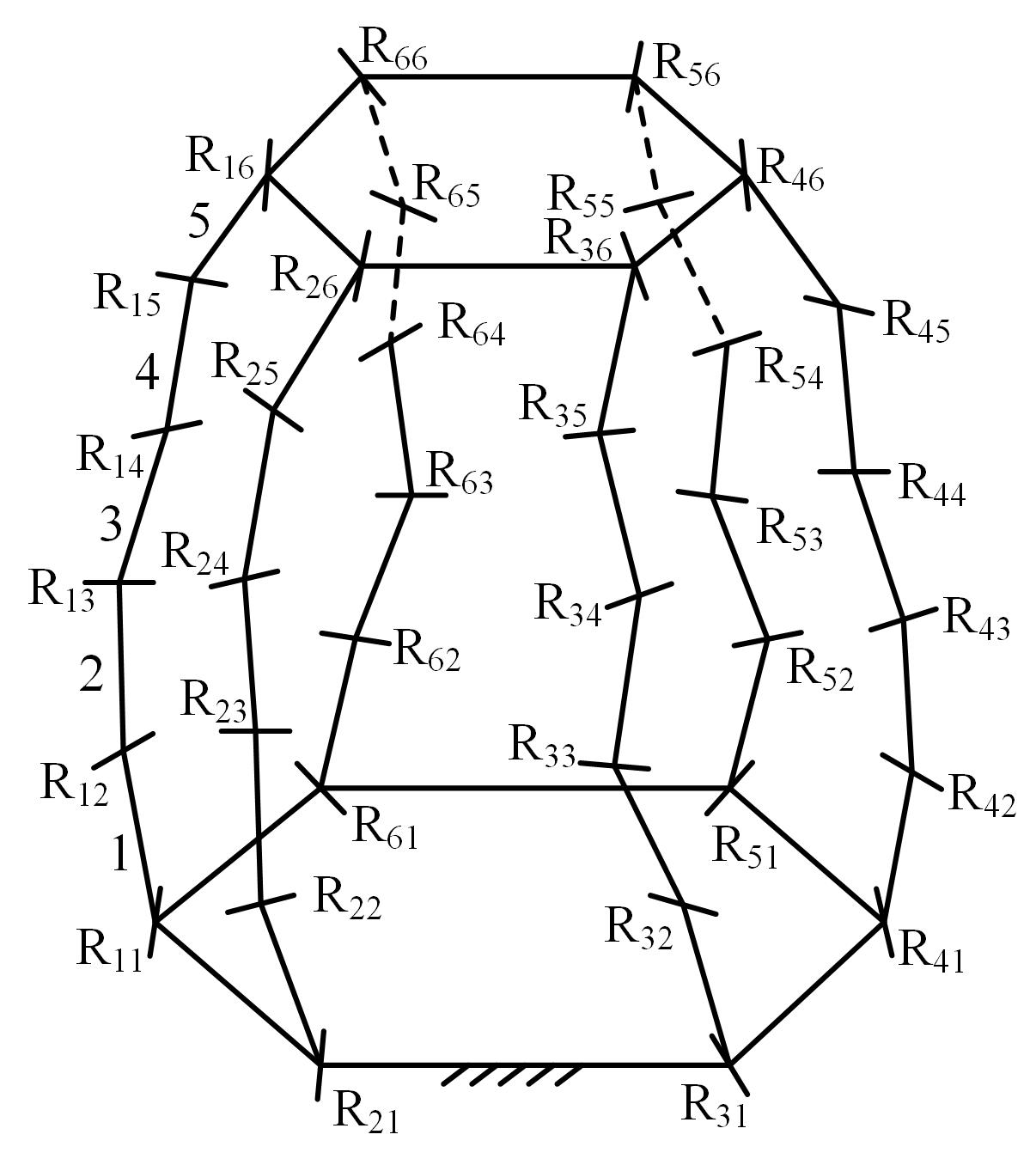
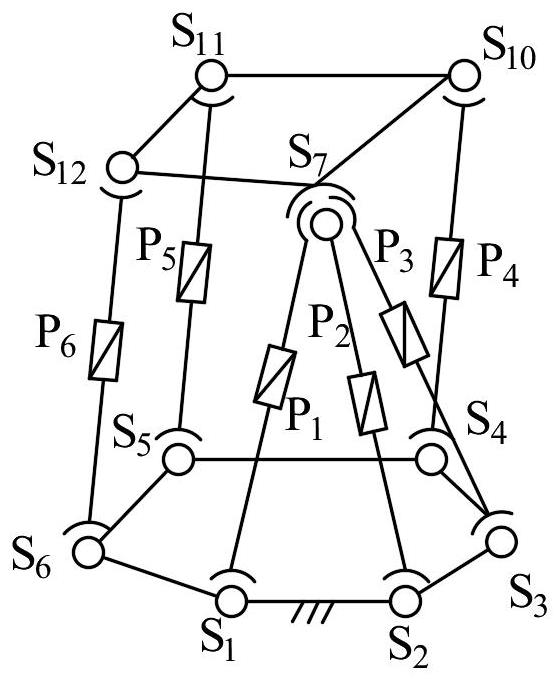
图2 6-6R 机构(k=4)
Fig.2 6-6R mechanism (k=4)
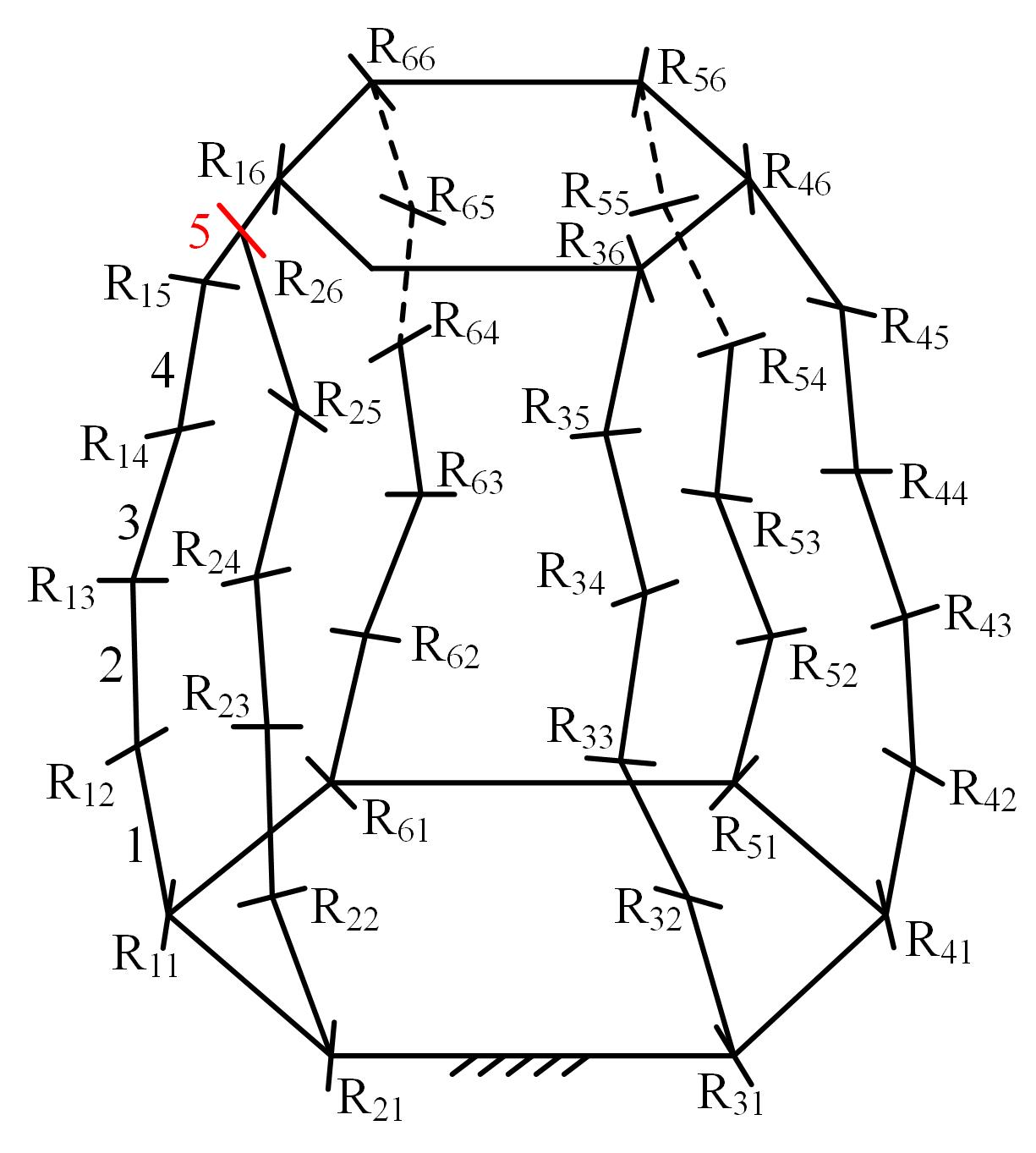
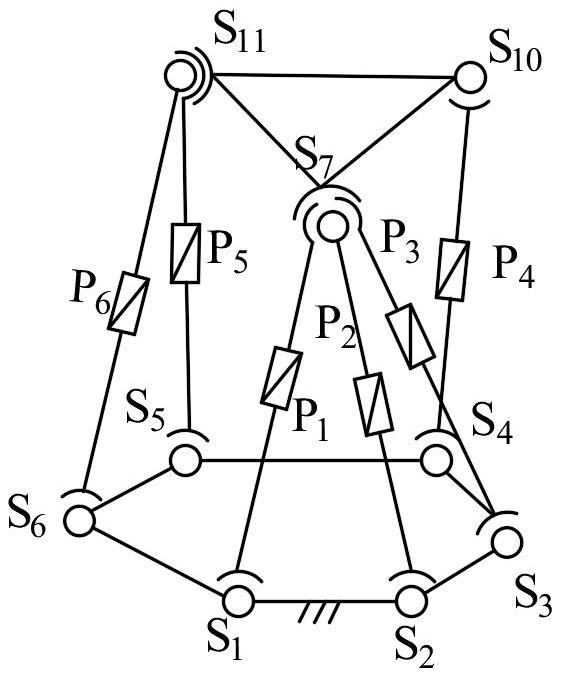
图3 一次降耦:(HSOC2)+4R 机构(k=3)
Fig.3 Primary decoupling: (HSOC2)+4R mechanism (k=3)
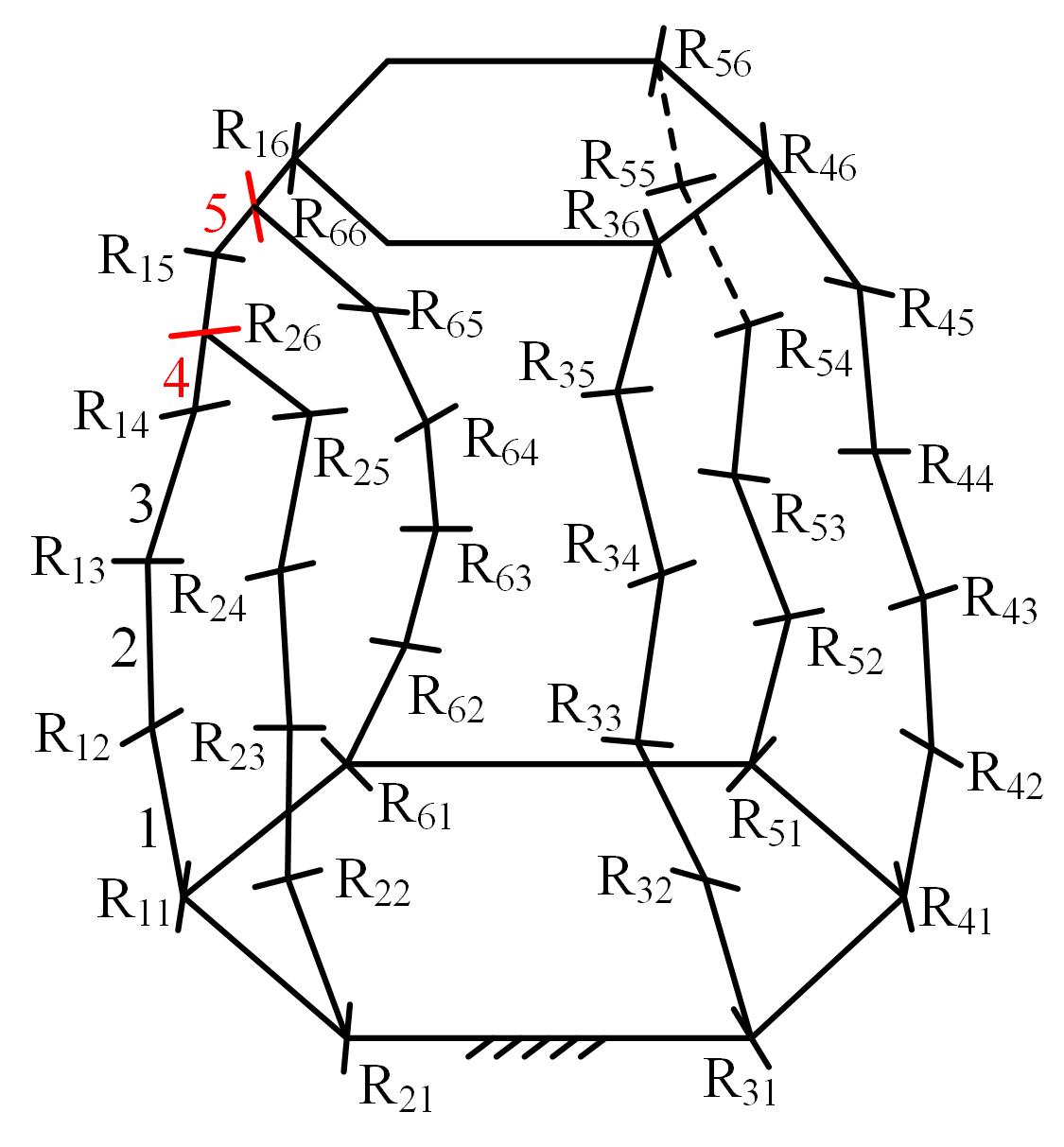
图4 二次降耦:(HSOC3)+3R 机构(k=2)
Fig.4 Secondary decoupling: (HSOC3)+3R mechanism (k=2)
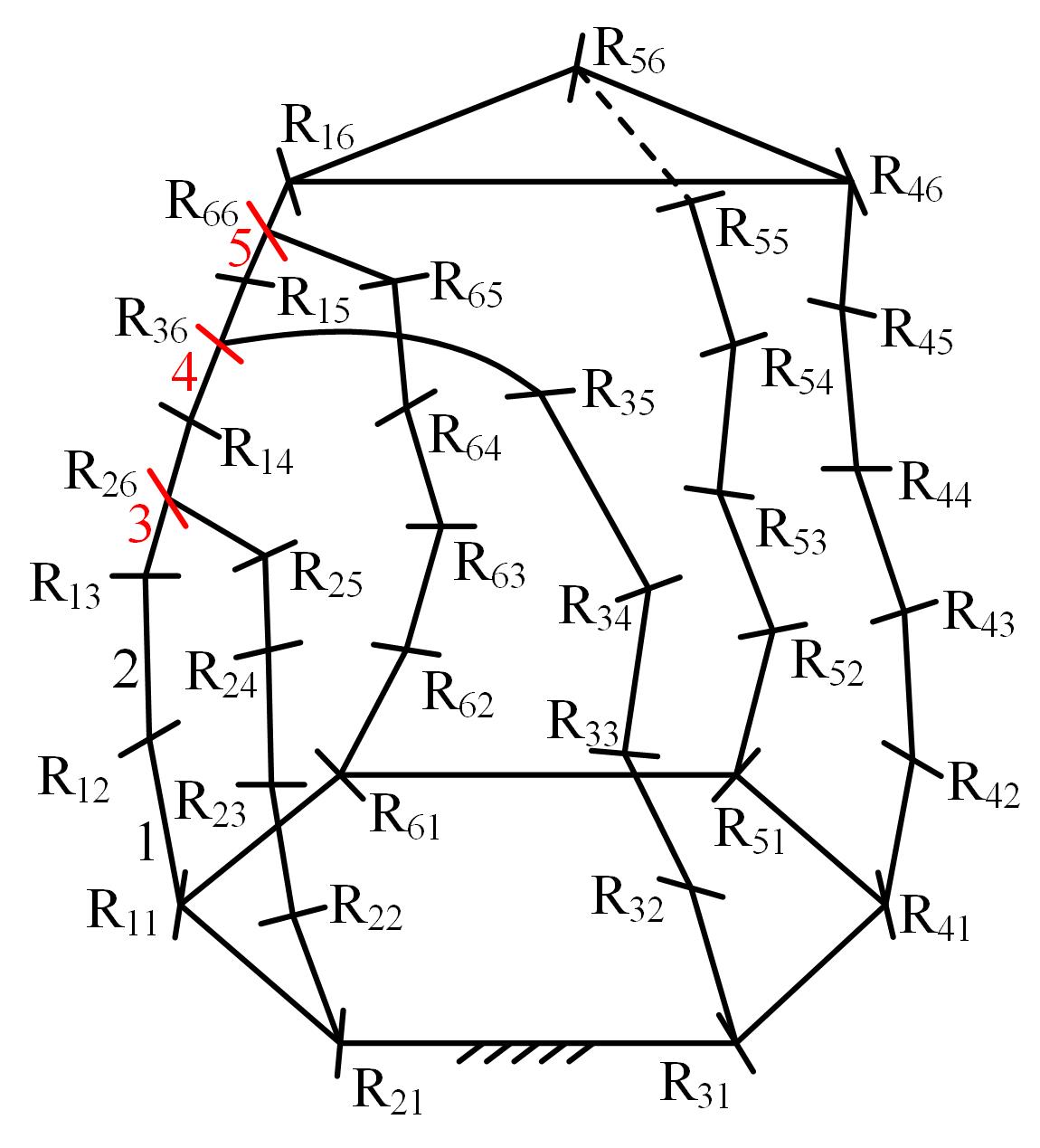
图5 三次降耦:(HSOC4)+2R 并联机构(k=1)
Fig.5 Tertiary decoupling: (HSOC4)+2R parallel mechanism(k=1)
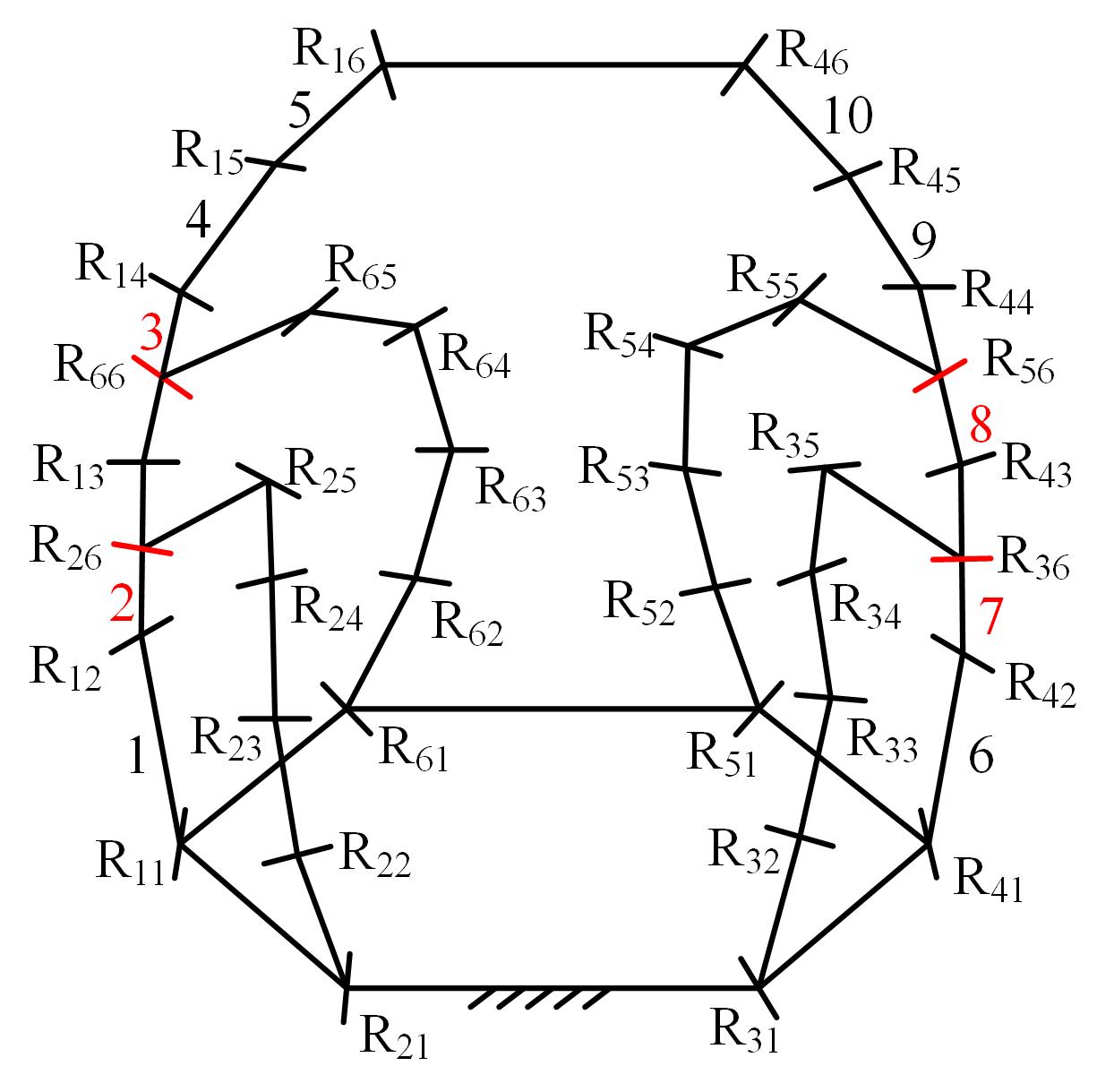
图6 四次降耦:(HSOC3)+(HSOC3) 并联机构(k=0)
Fig.6 Quaternary decoupling: (HSOC3)+(HSOC3) parallel mechanism(k=0)
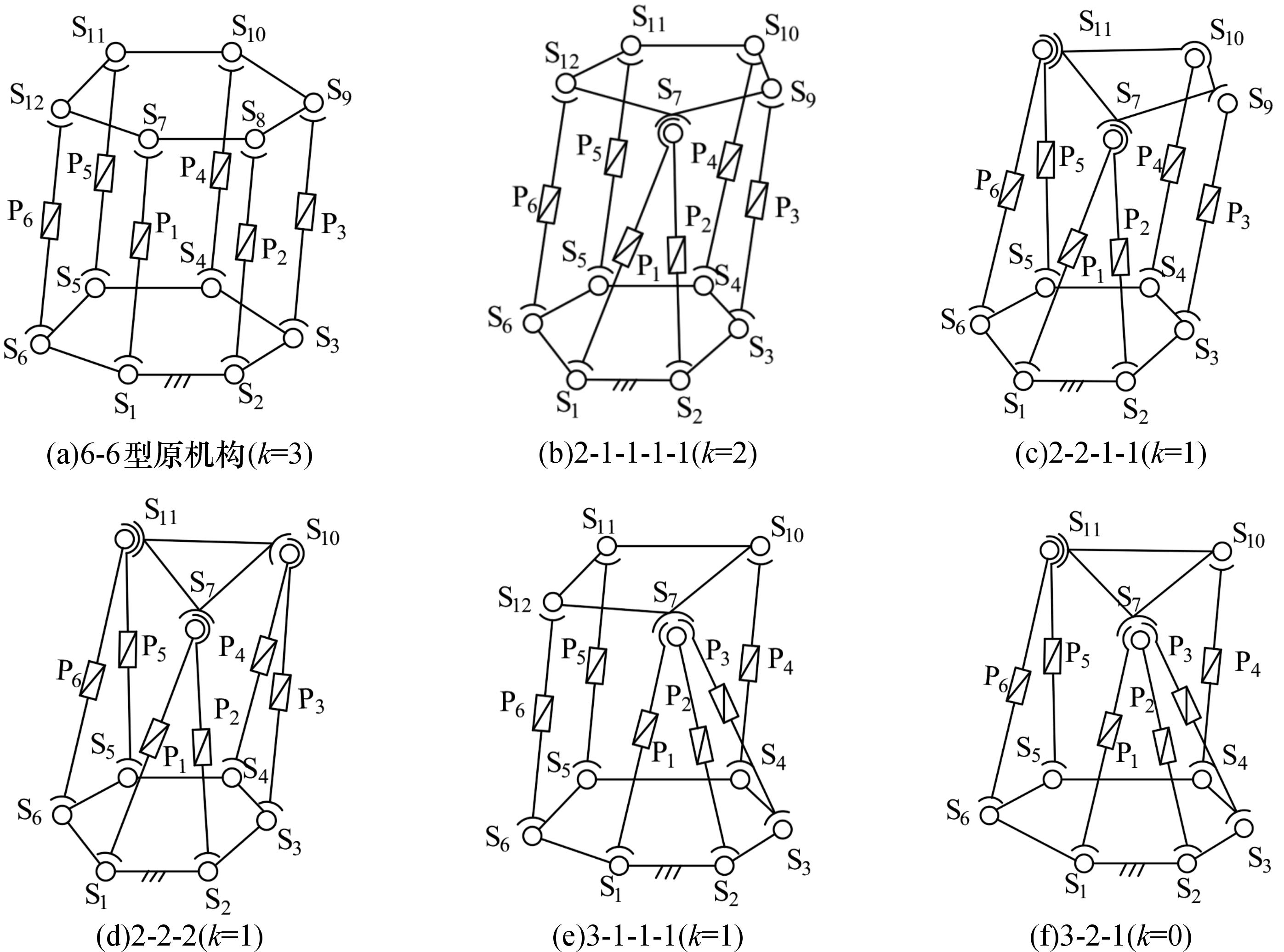
图7 典型6-DOF Stewart-Gough 机构及其拓扑降耦优化
Fig.7 Typical 6-DOF Stewart-Gough mechanism and its topological decoupling optimization
| 6-6型 | 6-5型 2-1-1-1-1式 | 6-4型 2-2-1-1式 | 6-4型 2-2-2式 | 6-4型 3-1-1-1式 | 6-3型 3-2-1式 | |
|---|---|---|---|---|---|---|
机 构 简 图 |
No.a |
No.b |
No.c |
No.d |
No.e |
No.f |
| k | 3 | 2 | 1 | 1 | 1 | 0 |
| 解耦性 | 无运动解耦性 | 位置-姿态分离:有运动解耦性 | ||||
表1 基于多重拓扑降耦的6-SPS并联机构的衍生机构及其耦合度k
Tab.1 Derivative mechanisms of 6-SPS parallel mechanism via topological decoupling and coupling degrees k
| 6-6型 | 6-5型 2-1-1-1-1式 | 6-4型 2-2-1-1式 | 6-4型 2-2-2式 | 6-4型 3-1-1-1式 | 6-3型 3-2-1式 | |
|---|---|---|---|---|---|---|
机 构 简 图 |
No.a |
No.b |
No.c |
No.d |
No.e |
No.f |
| k | 3 | 2 | 1 | 1 | 1 | 0 |
| 解耦性 | 无运动解耦性 | 位置-姿态分离:有运动解耦性 | ||||
| [1] | FRISOLI A, CHECCACCI D, SALSEDO F, et al. Synthesis by Screw Algebra of Translating In-parallel Actuated Mechanisms[M]∥Advances in Robot Kinematics. Dordrecht: Springer Netherlands, 2000: 433-440. |
| [2] | HUANG Zhen, LI Qinchuan, DING Huafeng. Theory of Parallel Mechanisms[M]. Dordrecht: Springer Netherlands, 2013. |
| [3] | HERVÉ J M. Design of Parallel Manipulators via the Displacement Group[C]∥Proc. of the 9th World Congress on the Theory of Machines and Mechanisms. Milan,1995:2079-2082. |
| [4] | LI Qinchuan, HUANG Zhen, HERVE J M. Type Synthesis of 3R2T 5-DOF Parallel Mechanisms Using the Lie Group of Displacements[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 173-180. |
| [5] | 杨廷力. 机器人机构拓扑结构学[M]. 北京: 机械工业出版社, 2004. |
| YANG Tingli. Topology Structure Design of Robot Mechanisms[M]. Beijing: China Machine Press, 2004. | |
| [6] | 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京: 科学出版社, 2012. |
| YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology[M]. Beijing: Science Press, 2012. | |
| [7] | YANG Tingli, LIU Anxin, SHEN Huiping, et al. Topology Design of Robot Mechanisms[M]. Singapore: Springer Nature Singapore, 2018. |
| [8] | GOGU G. Structural Synthesis of Parallel Robots: Part 1: Methodology[M]. Dordrecht: Springer Netherlands, 2008. |
| [9] | 杨廷力, 沈惠平, 刘安心, 等. 机构拓扑学理论的基本思想与数学方法——从方法论角度回顾几种原创性理论与方法[J]. 机械工程学报, 2020, 56(3): 1-15. |
| YANG Tingli, SHEN Huiping, LIU Anxin, et al. Basic Ideas and Mathematical Methods of Mechanism Topology Theory—Review of Several Original Mechanism Topology Theories in a Methodological Perspective[J]. Journal of Mechanical Engineering, 2020, 56(3): 1-15. | |
| [10] | LI Ju, WU Guanglei, SHEN Huiping, et al. Topology of Robotic Mechanisms: Framework and Mathematics Methods – in Conjunction with a Review of Four Original Theories[J]. Mechanism and Machine Theory, 2022, 175: 104895. |
| [11] | KONG Xianwen, GOSSELIN C. Type Synthesis of Parallel Mechanisms[M]. Heidelberg: Springer, 2007. |
| [12] | 高峰, 杨加伦, 葛巧德. 并联机器人型综合的GF集理论[M]. 北京: 科学出版社, 2011. |
| GAO Feng, YANG Jialun, GE Qiaode. GF set theory of parallel robot type synthesis [M]. Beijing: Science Press, 2011. | |
| [13] | 沈惠平, 朱小蓉, 尹洪波, 等. 并联机构的结构降耦原理及其设计方法[J]. 机械工程学报, 2016, 52(23): 102-113. |
| SHEN Huiping, ZHU Xiaorong, YIN Hongbo, et al. Principle and Design Method for Structure Coupling-reducing of Parallel Mechanisms[J]. Journal of Mechanical Engineering, 2016, 52(23): 102-113. | |
| [14] | 沈惠平. 机器人机构拓扑特征运动学[M]. 北京: 高等教育出版社, 2021. |
| SHEN Huiping. Topological Characteristics-based Kinematics for Robotic Mechanisms[M]. Beijing: Higher Education Press, 2021. | |
| [15] | 伊朗) 塔吉拉德 Taghirad, Hamid D. 并联机器人: 机构学与控制[M]. 刘山,译.北京: 机械工业出版社, 2018. |
| TAGHIRAD HAMID D. Parallel Robots: Mechanics and Control[M]. LIU Shan,Trans.Beijing: China Machine Press, 2018. | |
| [16] | 沈惠平, 尹洪波, 王振, 等. 基于拓扑结构分析的求解6-SPS并联机构位置正解的研究[J]. 机械工程学报, 2013, 49(21): 70-80. |
| SHEN Huiping, YIN Hongbo, WANG Zhen, et al. Research on Forward Position Solutions for 6-SPS Parallel Mechanisms Based on Topology Structure Analysis[J]. Journal of Mechanical Engineering, 2013, 49(21): 70-80. | |
| [17] | SHEN H P, YANG L J, MENG Q M, et al. Topological Structure Coupling-reducing of Parallel Mechanisms[C]∥Proceedings of the 14th IFToMM World Congress. Taipei, 2015: 348-357. |
| [18] | 杨廷力. 机械系统基本理论结构学·运动学·动力学[M]. 北京: 机械工业出版社, 1996. |
| YANG Tingli. Basic Theory of Mechanical System[M]. Beijing: China Machine Press, 1996. | |
| [19] | 沈惠平, 李菊, 朱小蓉, 等. 基于最优路径的并联机构自由度计算方法及其新公式[J]. 机械工程学报, 2024, 60(19): 40-52. |
| SHEN Huiping, LI Ju, ZHU Xiaorong, et al. New Method and Formula for Degree-of-freedom Calculation of Parallel Mechanism Based on Optimal Paths[J]. Journal of Mechanical Engineering, 2024, 60(19): 40-52. | |
| [20] | SELIG J M. Geometrical Methods in Robotics[M]. New York: Springer New York, 1996. |
| [21] | 黄真, 孔令富,方跃法. 并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997. |
| HUANG Zhen. Mechanism Theory and Control of Parallel Robot[M]. Beijing: China Machine Press, 1997. | |
| [22] | 刘辛军, 谢福贵, 汪劲松. 并联机器人机构学基础[M]. 北京: 高等教育出版社, 2018. |
| LIU Xinjun, XIE Fugui, WANG Jinsong. Fundamental of Parallel Robotic Mechanisms[M]. Beijing: Higher Education Press, 2018. | |
| [23] | WU Guanglei, SHEN Huiping. Parallel PnP Robots: Parametric Modeling, Performance Evaluation and Design Optimization[M]. Singapore: Springer Singapore, 2021. |
| [24] | 沈惠平, 李菊, 王振, 等. 基于结构降耦和运动解耦的并联机构拓扑结构优化及其性能改善[J]. 机械工程学报, 2017, 53(19): 176-186. |
| SHEN Huiping, LI Ju, WANG Zhen, et al. Topology Structure Optimization and Performance Improvement for Parallel Mechanisms Based on Structure Coupling-reducing and Motion Decoupling[J]. Journal of Mechanical Engineering, 2017, 53(19): 176-186. | |
| [25] | 许正骁. 三平移一转动并联操作手的设计与运动学、刚度及动力学分析[D]. 常州:常州大学,2019. |
| XU Zhengxiao. Design, Kinematic, Stiffness and Dynamic Analysis of a 3-Translational-1-Rotational Parallel Manipulator [D]. Changzhou: Changzhou University, 2019. | |
| [26] | 沈惠平, 许正骁, 许可, 等. 零耦合度且部分解耦的3T1R并联机构设计与运动分析[J]. 农业机械学报, 2019, 50(4): 382-392. |
| SHEN Huiping, XU Zhengxiao, XU Ke, et al. Design and Kinematic Analysis of Zero Coupling and Partially Decoupled 3T1R Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(4): 382-392. | |
| [27] | 沈惠平, 许可, 杨廷力, 等. 一种零耦合度且运动解耦的新型3T1R并联操作手2-(RPa3R)3R的设计及其运动学[J]. 机械工程学报, 2019, 55(5): 53-64. |
| SHEN Huiping, XU Ke, YANG Tingli, et al. New 3T1R Parallel Manipulator 2-(RPa3R)3R with Zero Coupling Degree and Partial Decoupling: Design and Kinematics[J]. Journal of Mechanical Engineering, 2019, 55(5): 53-64. | |
| [28] | WANG Z, SHEN H P, Deng J M, et al. An Easily Manufactured 6-DOF 3-1-1-1 SPS Type Parallel Mechanism and Its Forward Kinematics[C]∥The 2nd IFToMM Symposium on Mechanism Design for Robotics. Beijing, 2012: 12-14. |
| [29] | YU Tongzhu, SHEN Huiping, DENG Jiaming, et al. An Easily Manufactured Structure and Its Analytic Solutions for Forward and Inverse Position of 1–2–3-SPS Type 6-DOF Basic Parallel Mechanism[C]∥2012 IEEE International Conference on Robotics and Biomimetics (ROBIO). Guangzhou, 2012: 1194-1199. |
| [30] | 沈惠平, 李菊, 吴广磊, 等. 并联机器人机构的拓扑结构优化[M]. 北京:高等教育出版社, 2025. |
| SHEN Huiping, LI Ju, WU Guanglei, et al. Topological Structure Optimization for Parallel Robotic Mechanism[M]. Bejing: Higher Education Press, 2025. | |
| [31] | 沈惠平. 并联机器人机构拓扑分析方法与技巧及应用[M]. 南京: 江苏凤凰教育出版社, 2025. |
| SHEN Huiping. Topological Analysis for Parallel Robotic Mechanisms[M]. Nanjing: Phoenix Education Publishing Ltd., 2025. |
| [1] | 李明磊, 贾育秦, 张学良, 刘丽琴, 杜娟, 温淑花, 兰国生. 基于多目标差异演化算法的并联机构结构优化 [J]. J4, 201016, 21(16): 1915-1920. |
| [2] | 鲁开讲, 师俊平, 张锋涛. 平面三自由度并联机构动力学优化设计 [J]. J4, 201016, 21(16): 1926-1931. |
| [3] | 朱潇, 沈惠平, 李菊, 李涛, 叶鹏达, 朱伟. 可轮换用动平台三自由度并联机构的拓扑设计及其性能分析[J]. 中国机械工程, 2026, 37(1): 114-125. |
| [4] | 王浩, 罗浩东, 施亚中, 王立文, 张威, 王忠. 基于端到端深度学习模型TOPO-U型网的结构拓扑优化方法[J]. 中国机械工程, 2026, 37(1): 174-183. |
| [5] | 何昆, 周和超, 张济民. 列车防爬吸能器负泊松比超材料填充结构设计[J]. 中国机械工程, 2025, 36(12): 3040-3046. |
| [6] | 黄宁宁, 尤晶晶, 叶鹏达, 沈惠平, 李成刚, 吴洪涛. 一种运动可解耦的Stewart型并联机构的正运动学及奇异性[J]. 中国机械工程, 2025, 36(09): 1951-1960. |
| [7] | 赵星宇, 赵铁石, 许博, 刘相权, 秦宇飞. 并联式混合驱动机构运动学和传递性能分析[J]. 中国机械工程, 2025, 36(08): 1728-1739. |
| [8] | 黄昊1, 王曾2, 李波2, 卢泽华1, 刘怀举1. 基于折衷规划法的航发齿轮传动壳体结构热柔度协同拓扑优化[J]. 中国机械工程, 2025, 36(07): 1471-1478. |
| [9] | 苏珂1, 王颖1, 梁腾腾1, 魏义礼2, 张楠楠2. 基于知情构造理论的单材料柔性机构拓扑优化[J]. 中国机械工程, 2025, 36(04): 873-881. |
| [10] | 林家辉, 李壮壮, 李学霖, 李军. 一种路径吞噬拓扑优化新方法[J]. 中国机械工程, 2025, 36(03): 504-514. |
| [11] | 王书亭1, 谢晴天1, 杨奥迪1, 李小兵2, 熊体凡1, 谢贤达2. 等几何拓扑优化非齐次边界条件施加技术研究[J]. 中国机械工程, 2025, 36(03): 525-535. |
| [12] | 刘敏1, 2, 卢飞扬1, 占金青1, 2, 吴剑1, 朱本亮3. 考虑最小尺寸约束的内嵌可移动压电驱动柔顺机构拓扑优化设计[J]. 中国机械工程, 2025, 36(02): 255-264. |
| [13] | 王浩1, 2, 王江北3, 罗浩东3, 王立文4. 基于改进四叉树和比例边界有限元法的自适应设计域拓扑优化方法[J]. 中国机械工程, 2024, 35(05): 904-915,927. |
| [14] | 杨峰, 罗世杰, 杨江鸿, 王英俊, . 基于GPU加速的等几何拓扑优化高效多重网格求解方法[J]. 中国机械工程, 2024, 35(04): 602-613. |
| [15] | 苏永雷, 张志飞. 车身多性能约束下的一体压铸三角梁轻量化设计[J]. 中国机械工程, 2024, 35(04): 691-699. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||