


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (08): 1691-1699.DOI: 10.3969/j.issn.1004-132X.2025.08.005
周志伟1, 高健1,2( ), 张揽宇1,2
), 张揽宇1,2
收稿日期:2024-08-30
出版日期:2025-08-25
发布日期:2025-09-18
通讯作者:
高健
作者简介:周志伟,男,1987年生,博士研究生。研究方向为微电子装备制造、多轴运动平台控制。发表论文6篇。基金资助:
Zhiwei ZHOU1, Jian GAO1,2(), Lanyu ZHANG1,2
Received:2024-08-30
Online:2025-08-25
Published:2025-09-18
Contact:
Jian GAO
摘要:
并联机构驱动关节间的动力学耦合效应是影响其轨迹跟踪性能的关键难题,现有并联平台的多电机协同控制方法常常不考虑机构关节间的相互耦合关系及其关节协同关系,影响了机构末端的运动精度。针对上述问题,提出一种提高机构任务空间跟踪精度的无模型交叉耦合控制方法。通过引入表示相邻电机运动关系的电机协同误差,采用时延估计(TDE)技术间接地进行机构动力学闭环控制,解决动力学模型不确性问题;同时采用Lyapunov定理分析证明所提方法的稳定性,并在对称并联运动机构上进行所提方法的实验验证。结果表明,相比现有的时延控制(TDC)方法,所提方法可以通过并联机构的高效位置跟踪和稳定操作有效减小其末端运动跟踪误差。
中图分类号:
周志伟, 高健, 张揽宇. 对称并联运动机构的无模型交叉耦合控制[J]. 中国机械工程, 2025, 36(08): 1691-1699.
Zhiwei ZHOU, Jian GAO, Lanyu ZHANG. A Model-free Cross-coupling Control Method for Parallel Kinematic Mechanisms with Symmetric Structure[J]. China Mechanical Engineering, 2025, 36(08): 1691-1699.
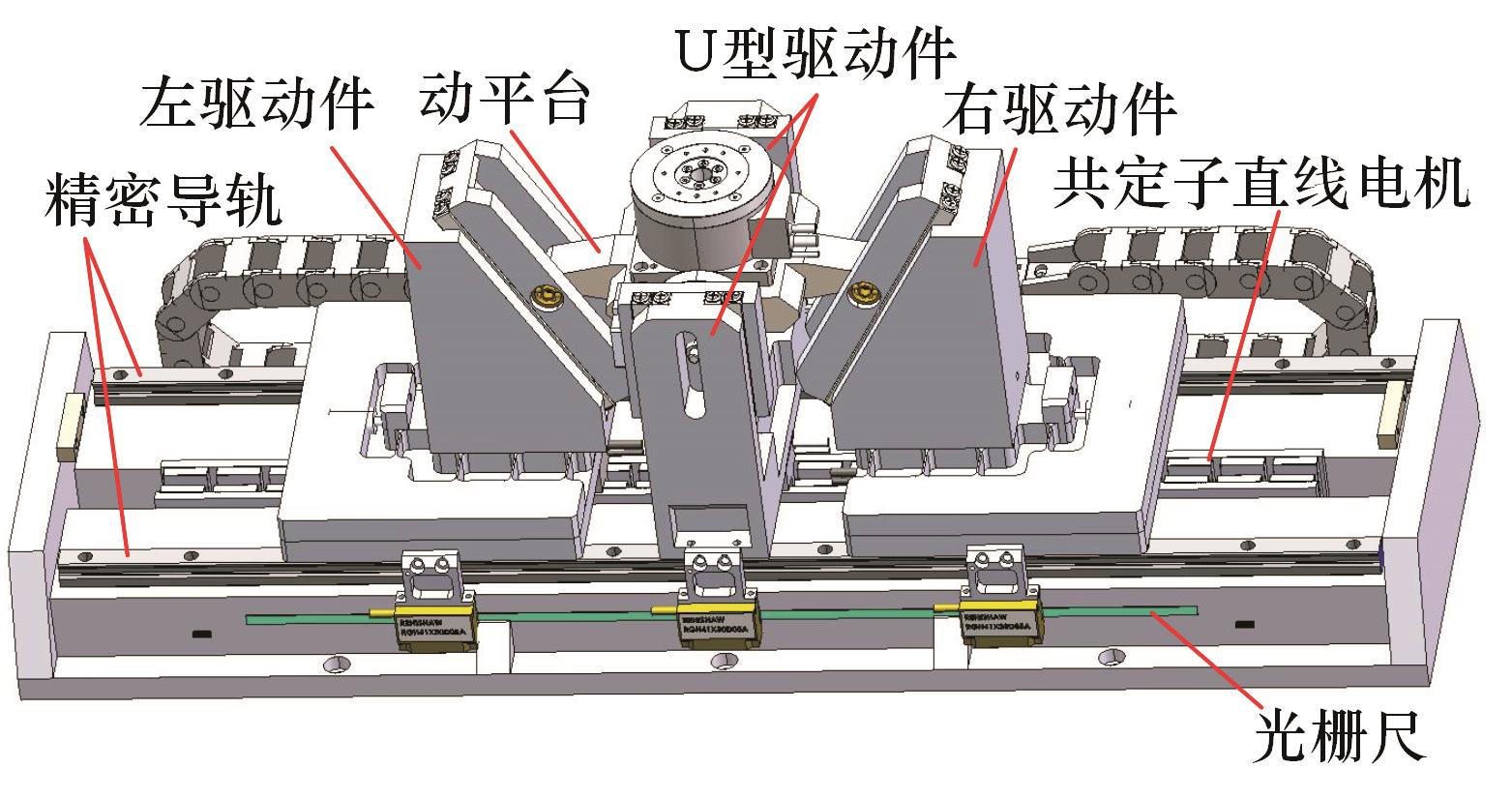
图1 对称并联运动机构的结构
Fig. 1 Structural of a symmetric parallel motion mechanism
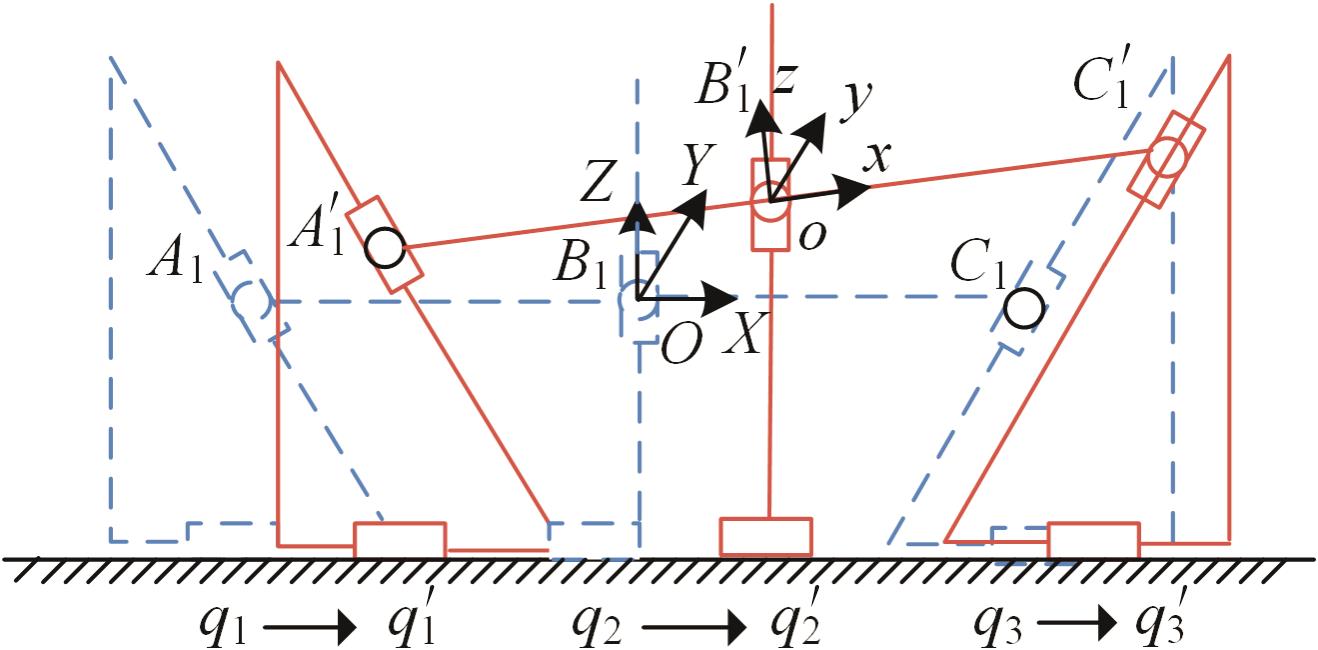
图2 对称并联运动机构的运动学模型
Fig. 2 Kinematic model of a symmetric parallel motion mechanism
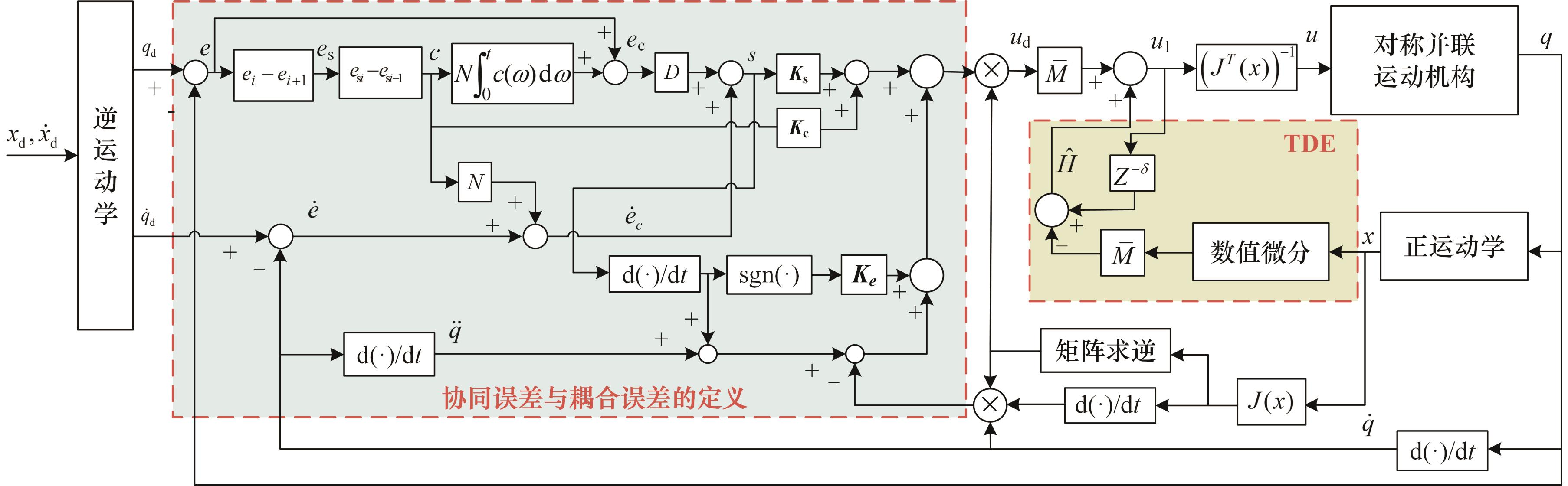
图3 所提无模型交叉耦合控制方法的控制框图
Fig. 3 Control diagram of the proposed model-free cross-coupling control method
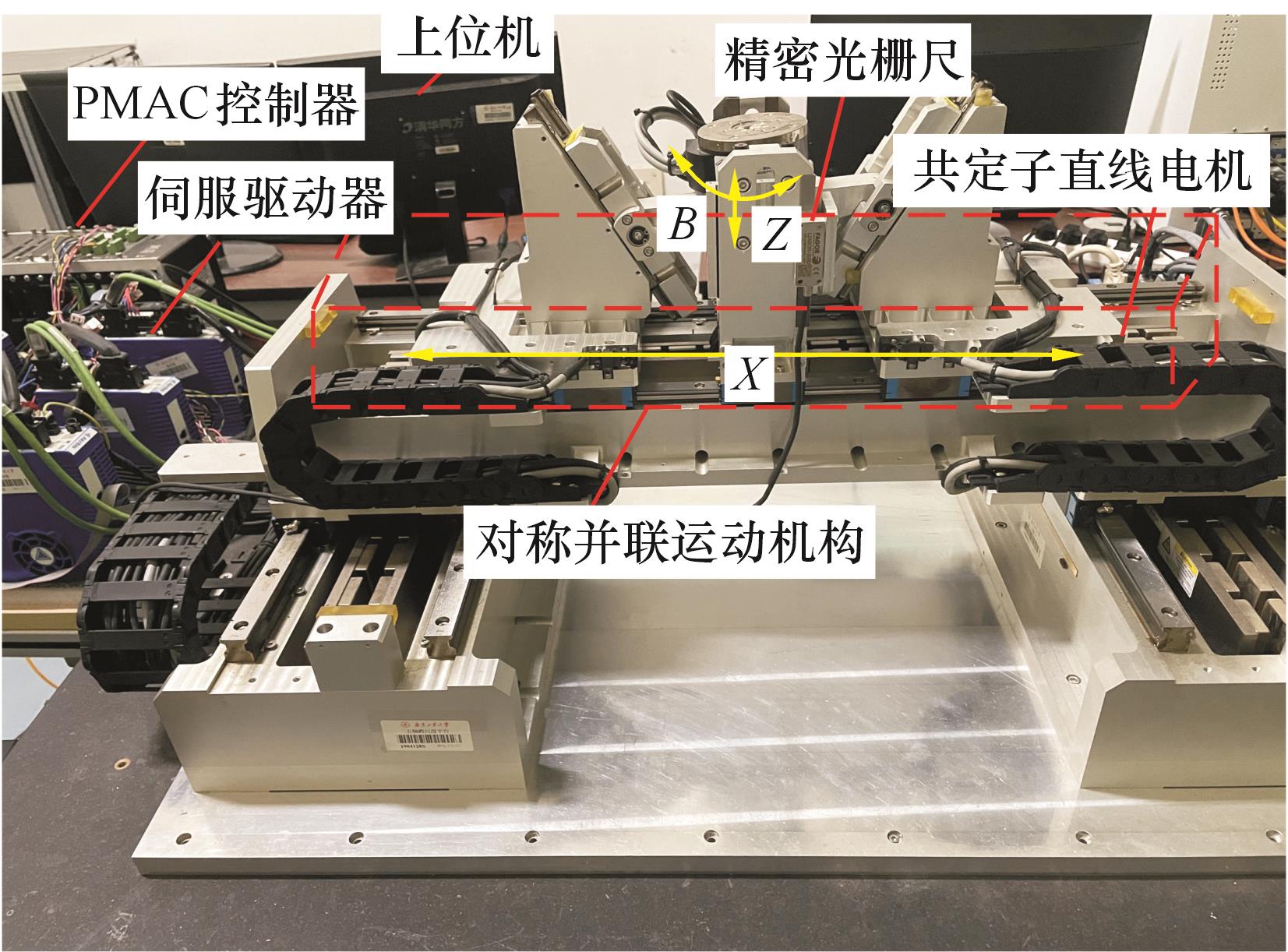
图4 对称并联运动机构的实验系统
Fig.4 Experimental system of a symmetric parallel motion mechanism
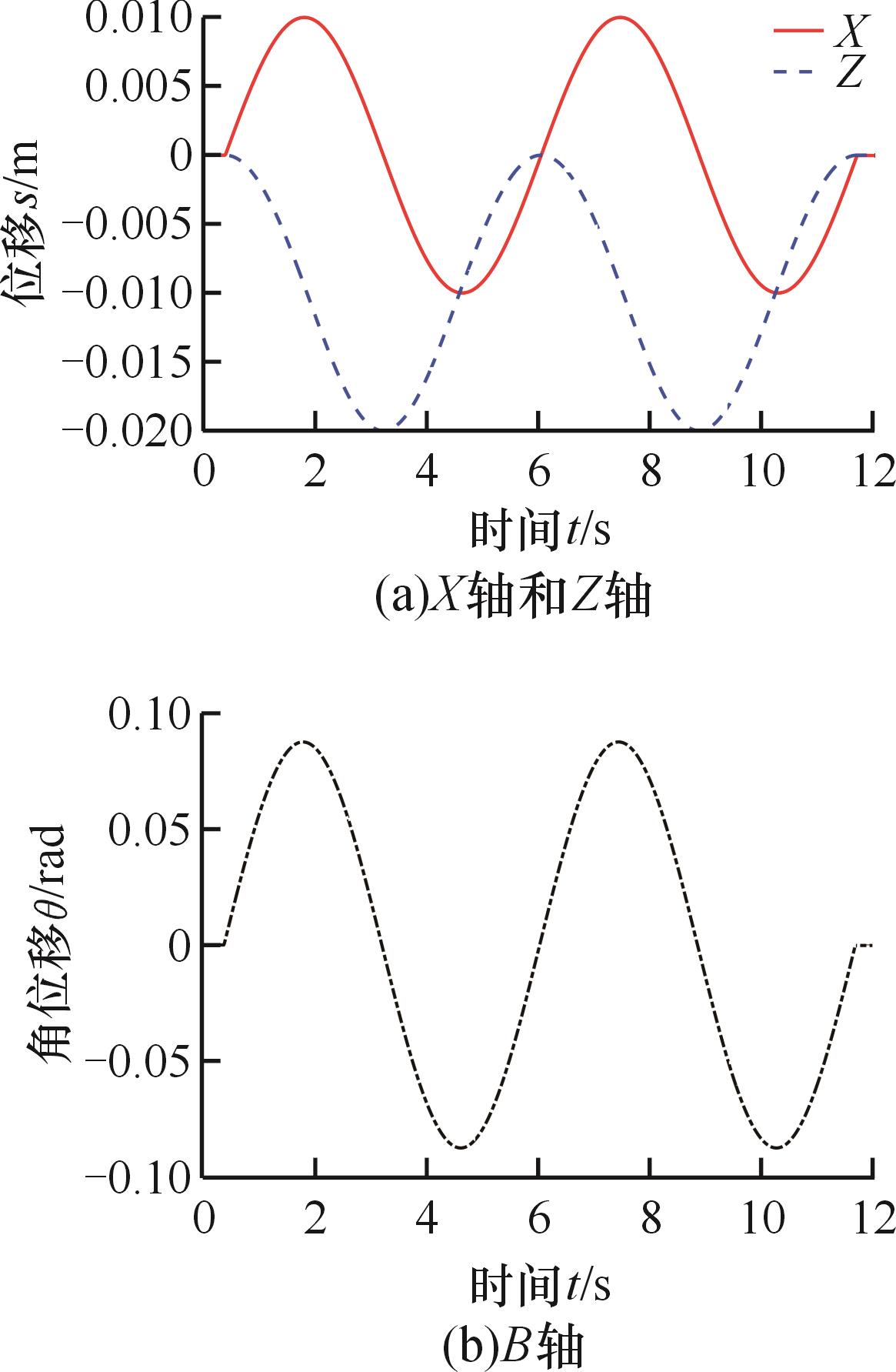
图5 X轴、Z轴和B轴的期望轨迹
Fig.5 Desired trajectories for the X, Z and B axis
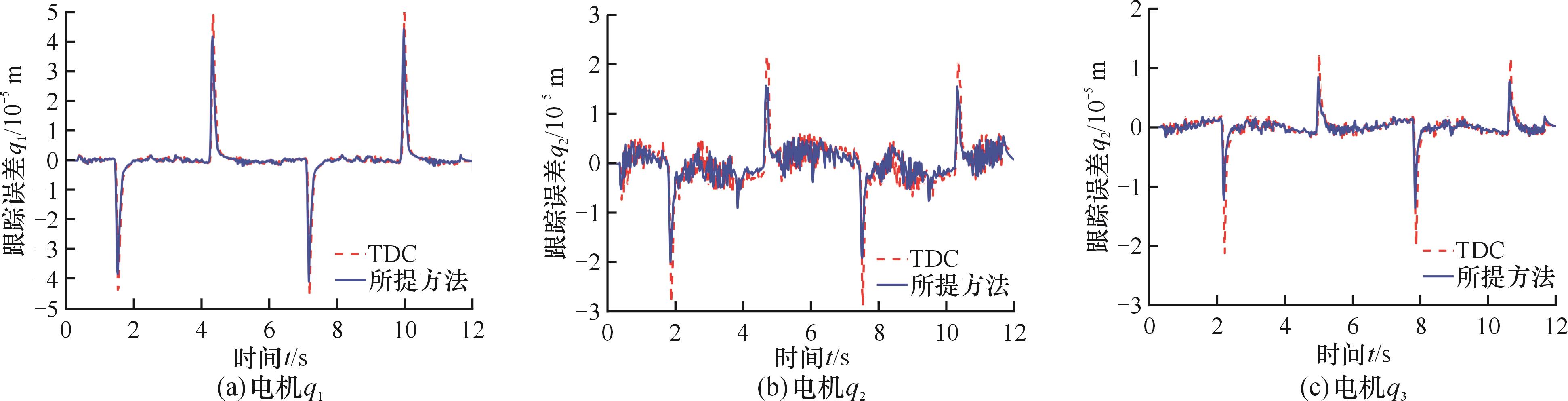
图6 所提方法和TDC在关节空间的跟踪误差
Fig.6 Tracking error in joint space with the proposed method and TDC
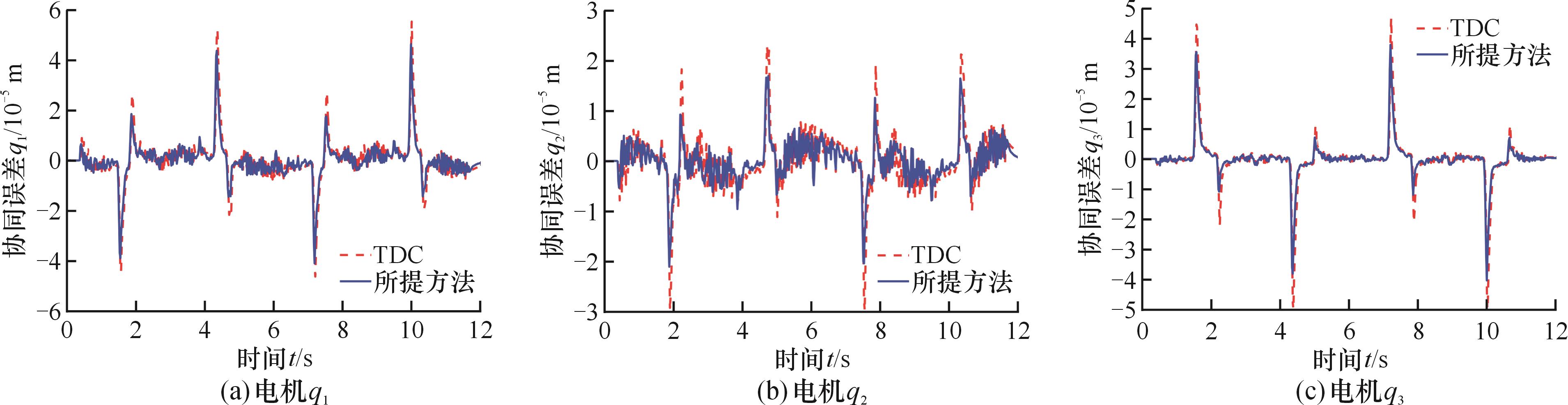
图7 所提方法和TDC在关节空间的协同误差
Fig.7 Cooperative error in joint space with the proposed method and TDC
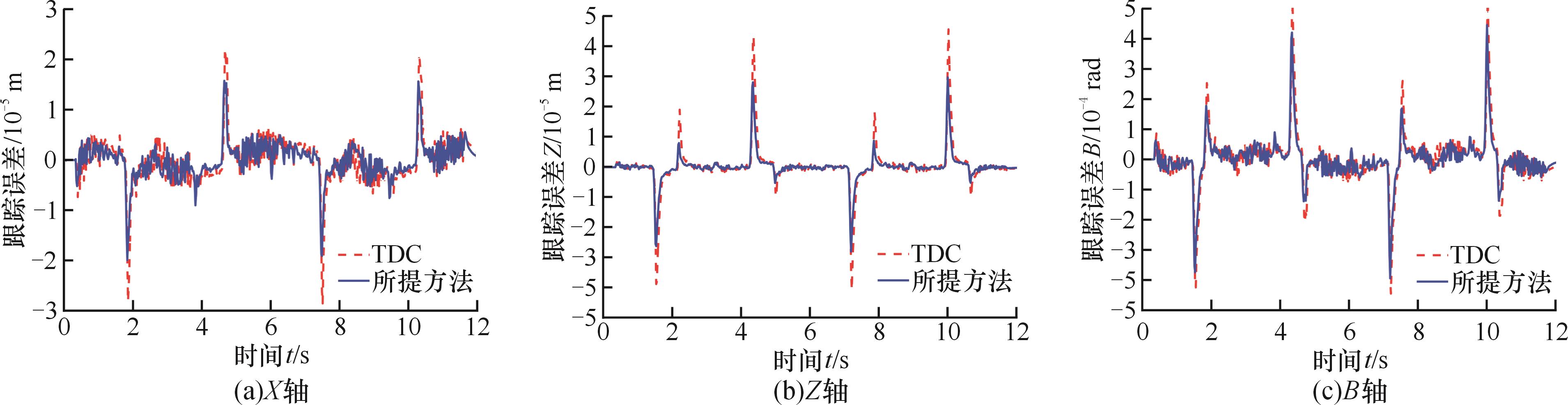
图8 所提方法和TDC在任务空间的跟踪误差
Fig.8 Tracking error in task space with the proposed method and TDC
| RMSE | IAE | ||||||
|---|---|---|---|---|---|---|---|
| q1 | q2 | q3 | q1 | q2 | q3 | ||
| 跟踪误差/μm | TDC | 7.49 | 4.91 | 2.41 | 28.21 | 39.25 | 13.35 |
| 所提方法 | 6.42 | 3.69 | 1.61 | 24.61 | 29.85 | 9.94 | |
| 减幅/% | 14.3 | 24.8 | 33.2 | 12.8 | 23.9 | 25.5 | |
| 协同误差/μm | TDC | 9.31 | 5.65 | 8.07 | 62.54 | 45.55 | 37.82 |
| 所提方法 | 7.57 | 4.21 | 6.13 | 49.16 | 34.54 | 28.46 | |
| 减幅/% | 18.7 | 25.5 | 23.9 | 21.4 | 24.2 | 24.7 | |
表1 所提方法和TDC在关节空间的跟踪误差、协同误差比较
Tab. 1 Comparison of tracking error and cooperative error in joint space between the proposed method and TDC
| RMSE | IAE | ||||||
|---|---|---|---|---|---|---|---|
| q1 | q2 | q3 | q1 | q2 | q3 | ||
| 跟踪误差/μm | TDC | 7.49 | 4.91 | 2.41 | 28.21 | 39.25 | 13.35 |
| 所提方法 | 6.42 | 3.69 | 1.61 | 24.61 | 29.85 | 9.94 | |
| 减幅/% | 14.3 | 24.8 | 33.2 | 12.8 | 23.9 | 25.5 | |
| 协同误差/μm | TDC | 9.31 | 5.65 | 8.07 | 62.54 | 45.55 | 37.82 |
| 所提方法 | 7.57 | 4.21 | 6.13 | 49.16 | 34.54 | 28.46 | |
| 减幅/% | 18.7 | 25.5 | 23.9 | 21.4 | 24.2 | 24.7 | |
| 控制方案 | RMSE | IAE | ||||
|---|---|---|---|---|---|---|
| X/μm | Z/μm | B/μrad | X/μm | Z/μm | B/mrad | |
| TDC | 4.91 | 6.98 | 89.61 | 39.25 | 32.75 | 0.61 |
| 所提方法 | 3.69 | 4.51 | 72.88 | 29.85 | 20.95 | 0.47 |
| 减幅/% | 24.8 | 35.4 | 18.7 | 23.9 | 36.1 | 21.3 |
表2 所提方法和TDC在任务空间的跟踪误差比较
Tab.2 Comparison of tracking error in task space between the proposed method and TDC
| 控制方案 | RMSE | IAE | ||||
|---|---|---|---|---|---|---|
| X/μm | Z/μm | B/μrad | X/μm | Z/μm | B/mrad | |
| TDC | 4.91 | 6.98 | 89.61 | 39.25 | 32.75 | 0.61 |
| 所提方法 | 3.69 | 4.51 | 72.88 | 29.85 | 20.95 | 0.47 |
| 减幅/% | 24.8 | 35.4 | 18.7 | 23.9 | 36.1 | 21.3 |
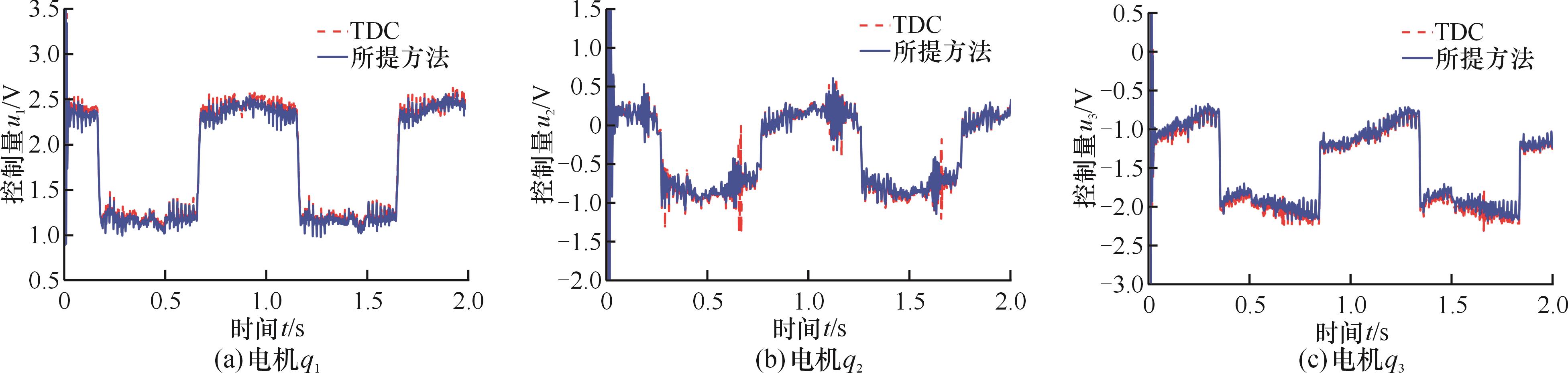
图9 并联机构各电机的伺服指令
Fig.9 Servo commands for each motor of the parallel mechanism
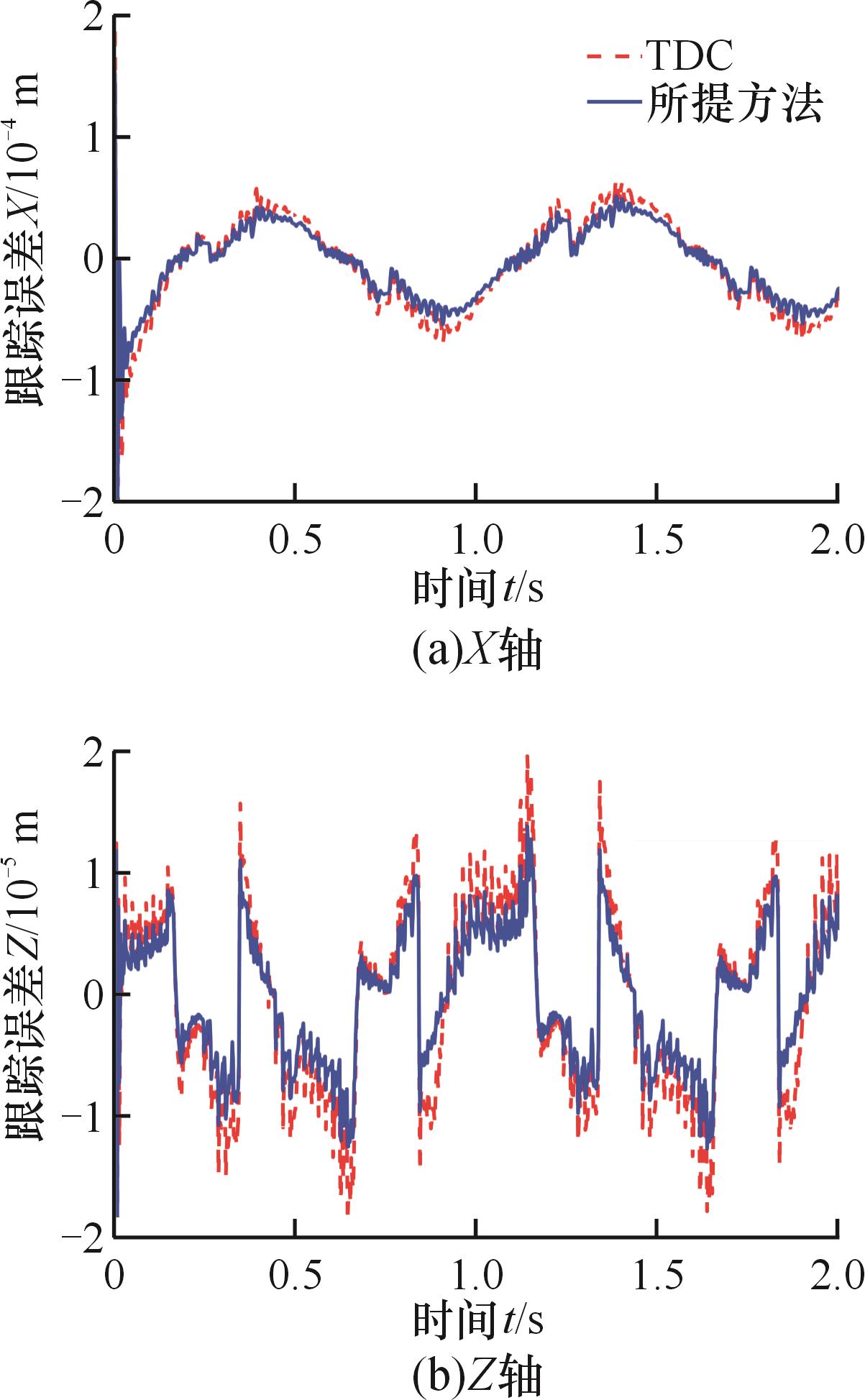
图10 并联机构X和Z轴的跟踪误差
Fig.10 Tracking errors of X and Z axis of the parallel mechanism
| [1] | YAO Suhua, GAO Guoqin, GAO Zhiqiang. On Multi-axis Motion Synchronization: the Cascade Control Structure and Integrated SMC-ADRC Design[J]. ISA Transactions, 2021, 109: 259-268. |
| [2] | WANG Ke, LI Ju, SHEN Huiping, et al. Inverse Dynamics of a 3-DOF Parallel Mechanism Based on Analytical Forward Kinematics[J]. Chinese Journal of Mechanical Engineering, 2022, 35(1): 119. |
| [3] | LUO Yuheng, GAO Jian, ZHANG Lanyu, et al. Kinematic Calibration of a Symmetric Parallel Kinematic Machine Using Sensitivity-based Iterative Planning[J]. Precision Engineering, 2022, 77: 164-178. |
| [4] | 汪满新, 李兰彬, 李正亮, 等. 一类1T2R并联机构拓扑结构综合及优选[J]. 中国机械工程, 2022, 33(20): 2395-2402. |
| WANG Manxin, LI Lanbin, LI Zhengliang, et al. Topological Structure Synthesis and Optimization of 1T2R Parallel Mechanisms[J]. China Mechanical Engineering, 2022, 33(20): 2395-2402. | |
| [5] | BODIE K, TOGNON M, SIEGWART R. Dynamic End Effector Tracking with an Omnidirectional Parallel Aerial Manipulator[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8165-8172. |
| [6] | LUO Yuheng, GAO Jian, CHEN Disai, et al. Accurate Error Compensation Method for Multi-axis Parallel Machine via Singularized Jacobi Geometric Parameter Correction and Coupling Error Evaluation[J]. Robotics and Computer-Integrated Manufacturing, 2024, 89: 102771. |
| [7] | YAN Peng, HUANG Hailin, LI Bing, et al. A 5-DOF Redundantly Actuated Parallel Mechanism for Large Tilting Five-face Machining[J]. Mechanism and Machine Theory, 2022, 172: 104785. |
| [8] | 梁旭, 苏婷婷, 侯增广, 等. 基于变阻抗控制的冗余驱动并联机器人多目标内力优化[J]. 自动化学报, 2023, 49(5): 1099-1115. |
| LIANG Xu, SU Tingting, HOU Zengguang, et al. A Multi-objective Internal Preload Optimization Method of Redundantly Actuated Parallel Robots Based on Variable Impedance Control[J]. Acta Automatica Sinica, 2023, 49(5): 1099-1115. | |
| [9] | HE Yuhang, WU Yaozhong, LI Weijia. Nonlinear Extended State Observer-based Adaptive Higher-order Sliding Mode Control for Parallel Antenna Platform with Input Saturation[J]. Nonlinear Dynamics, 2023, 111(17): 16111-16132. |
| [10] | YANG Xu, ZHU Wule. Design, Analysis, and Control of an XY Parallel Nanomanipulator with Multiple Actuation Modes[J]. IEEE Transactions on Industrial Electronics, 2020, 67(9): 7639-7648.[LinkOut] |
| [11] | KHALILPOUR S A, KHORRAMBAKHT R, TAGHIRAD H D, et al. Robust Cascade Control of a Deployable Cable-driven Robot[J]. Mechanical Systems and Signal Processing, 2019, 127: 513-530. |
| [12] | ALTAN A, HACiOĞLU R. Model Predictive Control of Three-axis Gimbal System Mounted on UAV for Real-time Target Tracking under External Disturbances[J]. Mechanical Systems and Signal Processing, 2020, 138: 106548. |
| [13] | SHANG Weiwei, CONG Shuang, GE Yuan. Coordination Motion Control in the Task Space for Parallel Manipulators with Actuation Redundancy[J]. IEEE Transactions on Automation Science and Engineering, 2013, 10(3): 665-673. |
| [14] | AFLAKIAN A, SAFARYAZDI A, TALE MASOULEH M, et al. Experimental Study on the Kinematic Control of a Cable Suspended Parallel Robot for Object Tracking Purpose[J]. Mechatronics, 2018, 50: 160-176. |
| [15] | SHANG Weiwei, ZHANG Bin, CONG Shuang, et al. Dual-space Adaptive Synchronization Control of Redundantly-actuated Cable-driven Parallel Robots[J]. Mechanism and Machine Theory, 2020, 152: 103954. |
| [16] | MERLET J P. Simulation of Discrete-time Controlled Cable-driven Parallel Robots on a Trajectory[J]. IEEE Transactions on Robotics, 2017, 33(3): 675-688. |
| [17] | PI Yangjun, WANG Xuanyin. Observer-based Cascade Control of a 6-DOF Parallel Hydraulic Manipulator in Joint Space Coordinate[J]. Mechatronics, 2010, 20(6): 648-655. |
| [18] | ZHANG Gang, WU Jianhua, LIU Pinkuan, et al. Dynamic Analysis and Model-based Feedforward Control of a 2-DOF Translational Parallel Manipulator Driven by Linear Motors[J]. Industrial Robot, 2013, 40(6): 597-609. |
| [19] | LIU Xiaofei, YAO Jiantao, LI Qi, et al. Coordination Dynamics and Model-based Neural Network Synchronous Controls for Redundantly Full-actuated Parallel Manipulator[J]. Mechanism and Machine Theory, 2021, 160: 104284. |
| [20] | ZHAN Boyu, ZHANG Lanyu, LIU Yachao, et al. Model Predictive and Compensated ADRC for Permanent Magnet Synchronous Linear Motors[J]. ISA Transactions, 2023, 136: 605-621. |
| [21] | 商德勇, 黄欣怡, 黄云山, 等. 基于Kane方程的Delta并联机器人刚柔耦合动力学研究[J]. 机械工程学报, 2024, 60(7): 124-133. |
| SHANG Deyong, HUANG Xinyi, HUANG Yunshan, et al. Research on Rigid-flexible Coupling Dynamics of Delta Parallel Robot Based on Kane Equation[J]. Journal of Mechanical Engineering, 2024, 60(7): 124-133. | |
| [22] | ZHU Baojun, LI Erwei, ZHAO Tieshi, et al. Dynamic Characteristics of Series-parallel Hybrid Rigid-flexible Coupling Double-mass Underactuated System on Floating Platform[J]. Mechanism and Machine Theory, 2023, 179: 105132.[LinkOut] |
| [23] | SHI Pengwei, SUN Weichao, YANG Xuebo, et al. Master-slave Synchronous Control of Dual-drive Gantry Stage with Cogging Force Compensation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 53(1): 216-225. |
| [24] | ZHONG Yongbin, GAO Jian, ZHANG Lanyu. Fractional-order Feedforward Control Method for Permanent Magnet Linear Synchronous Motor Based on Frequency-domain Adjustment Theory[J]. Mechanical Systems and Signal Processing, 2023, 190: 110115. |
| [25] | LIU Zhitai, LIN Weiyang, YU Xinghu, et al. Approximation-free Robust Synchronization Control for Dual-linear-motors-driven Systems with Uncertainties and Disturbances[J]. IEEE Transactions on Industrial Electronics, 2021, 69(10): 10500-10509. |
| [26] | XIE Bin, LEI Li, YAO Yuan, et al. Advanced Synchronous Control of Dual Parallel Motion Systems[J]. IEEE Transactions on Industrial Electronics, 2022, 70(2): 1270-1281. |
| [27] | 张鑫, 刘金国. 基于时延估计的空间机器人无模型姿态解耦控制[J]. 宇航学报, 2021, 42(9): 1150-1161. |
| ZHANG Xin, LIU Jinguo. Model-free Attitude Decoupling Control of Space Robots Based on Time- delay Estimation[J]. Journal of Astronautics, 2021, 42(9): 1150-1161. |
| [1] | 何洋, 李刚, 余孝楠. 基于变论域的高速行驶智能汽车模糊模型预测控制方法研究[J]. 中国机械工程, 2025, 36(03): 604-613. |
| [2] | 孙凤1, 祝安杰1, 张明1, 裴文哲1, 金俊杰1, 张伟伟2, 唐钧跃2, 姜生元2. 月球弹簧回复式绳驱采样机械臂的设计及试验[J]. 中国机械工程, 2024, 35(11): 1977-1985. |
| [3] | 余胜东1, 2, 3, 李小鹏1, 2, 杨思朋2, 吴鸿源1, 2, 胡文科1, 2, 蔡博凡1, 2, 马金玉3. 基于自适应有限时间控制策略的高分辨率显微镜运动控制[J]. 中国机械工程, 2024, 35(09): 1688-1697. |
| [4] | 刘送永1, 吴洪状2, 程诚2, 宋明江1, 3, 崔玉明4. 煤矿掘进机自定位截割控制方法及试验研究[J]. 中国机械工程, 2024, 35(07): 1318-1329. |
| [5] | 刘俊玲, 冯港辉, 张俊江, 杨凯. 无人驾驶混合动力汽车轨迹跟踪节能控制融合研究[J]. 中国机械工程, 2024, 35(04): 678-690. |
| [6] | 梅杰, 覃嘉锐, 陈定方, 陈昆, . 基于视觉同时定位与地图构建的水下图像增强式视觉三维重建方法[J]. 中国机械工程, 2024, 35(02): 268-279. |
| [7] | 隋新, 刘春阳, 詹坤, 王张飞, 张毅晖, . 人机协同控制的车道保持辅助系统安全性能研究[J]. 中国机械工程, 2021, 32(16): 1994-2001. |
| [8] | 李阳1,2,3;刘子明1,2,4;陈庆盈1,2,3 . 考虑打滑干扰的解耦式主动脚轮全向移动机器人跟踪控制[J]. 中国机械工程, 2020, 31(18): 2247-2253. |
| [9] | 邱少林;钱立军;陆建辉. 基于最优预瞄的智能车变道控制[J]. 中国机械工程, 2019, 30(23): 2778-2783. |
| [10] | 覃艳明;赵静一;马金玉;王建军. 八自由度机械臂的轨迹跟踪控制[J]. 中国机械工程, 2019, 30(22): 2741-2747,2756. |
| [11] | 黄道敏1,2;韩丽君1;唐国元1;周曾成1;徐国华1. 水下机械手分数阶积分滑模轨迹跟踪控制方法研究[J]. 中国机械工程, 2019, 30(13): 1513-1518. |
| [12] | 贝旭颖1,2;平雪良1,2;高文研1,2. 纵向打滑状态下轮式移动机器人轨迹跟踪控制[J]. 中国机械工程, 2018, 29(16): 1958-1964. |
| [13] | 叶锦华, 吴海彬. 不确定轮式移动机器人统一自适应神经网络H∞控制[J]. 中国机械工程, 2017, 28(02): 150-155. |
| [14] | 叶锦华, 李迪, 叶峰. 输入受限的非完整移动机器人的自适应模糊控制[J]. 中国机械工程, 2014, 25(8): 1010-1016. |
| [15] | 董晓星, 李戈, 刘刚峰, 赵杰. 冗余空间机械臂的运动学和笛卡尔阻抗控制方法[J]. 中国机械工程, 2014, 25(1): 36-41. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||