


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (2): 442-451.DOI: 10.3969/j.issn.1004-132X.2026.02.019
罗杭, 杨晔( ), 陈本永
), 陈本永
收稿日期:2025-01-15
出版日期:2026-02-25
发布日期:2026-03-13
通讯作者:
杨晔
作者简介:罗 杭,女,2000 年生,硕士研究生。研究方向为机器人控制基金资助:
LUO Hang, YANG Ye(), CHEN Benyong
Received:2025-01-15
Online:2026-02-25
Published:2026-03-13
Contact:
YANG Ye
摘要:
针对工业机器人抓取机械零件过程中零件识别速度慢、抓取成功率低等问题,提出了一种基于SGV-YOLOv8模型的机械零件智能识别与抓取方法。采用单目相机和激光测距模块构建深度视觉检测装置,实现机械零件三维定位;将YOLOv8模型作为基本架构,在骨干网络使用StarNet网络替换原有结构,并在颈部引入GSConv模块和VoV-GSCSP结构,实现了降低模型复杂程度的同时提高检测速度和抓取率。实验结果表明,与原模型相比,设计的SGV-YOLOv8模型(StarNet-GSConv-VoV YOLOv8)的模型参数量和浮点运算数(GFLOPs)分别下降了51.9%和51%,而每秒检测帧数(FPS)提高了37.6%;构建的工业机器人抓取装置的零件抓取成功率为80%。
中图分类号:
罗杭, 杨晔, 陈本永. 基于SGV-YOLOv8模型的机械零件智能识别与抓取方法[J]. 中国机械工程, 2026, 37(2): 442-451.
LUO Hang, YANG Ye, CHEN Benyong. Intelligent Part Identification and Grabbing Method Based on SGV-YOLOv8 Model[J]. China Mechanical Engineering, 2026, 37(2): 442-451.
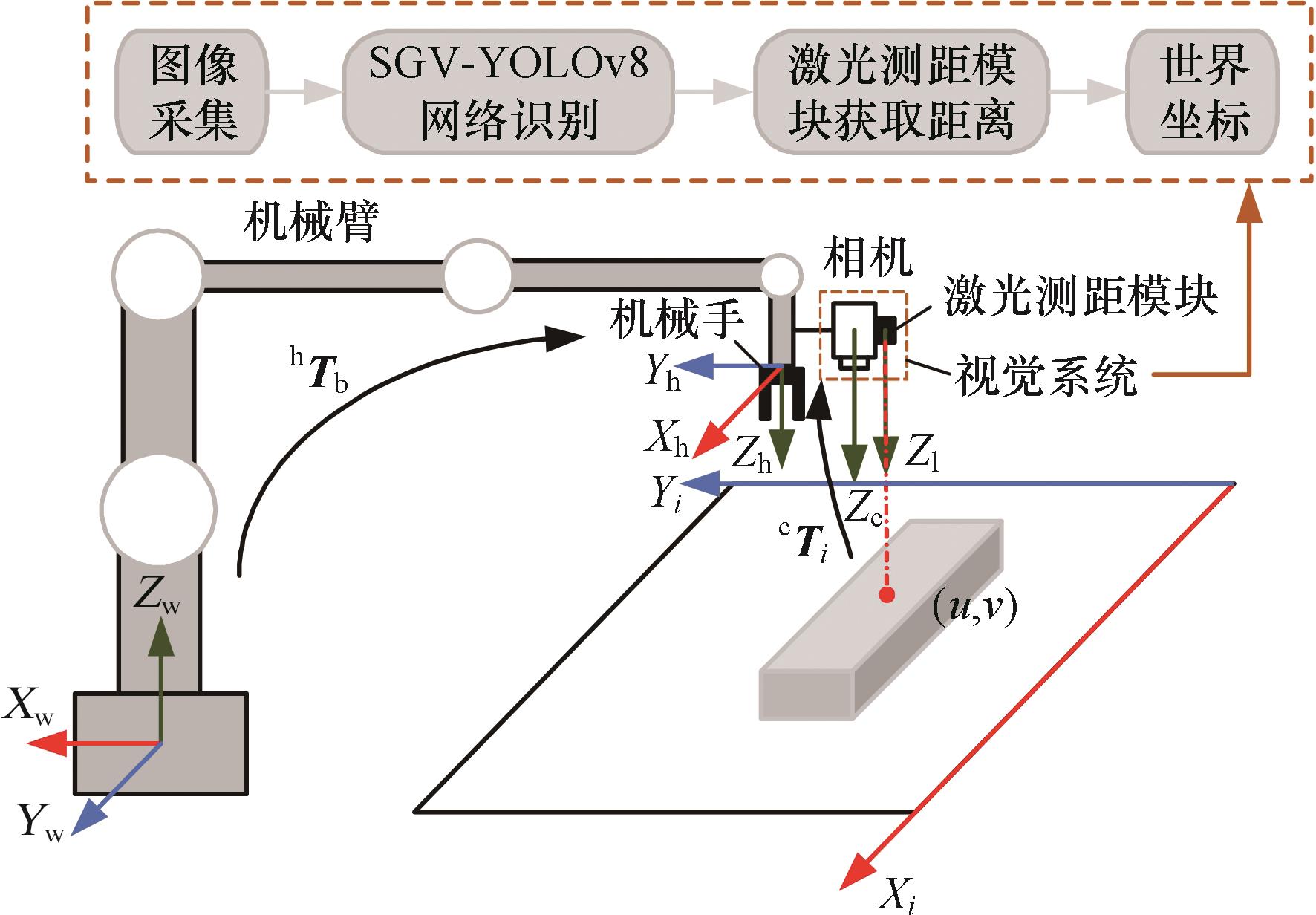
图1 零件智能识别与抓取系统示意图
Fig.1 Schematic diagram of intelligent part identification and grabbing system
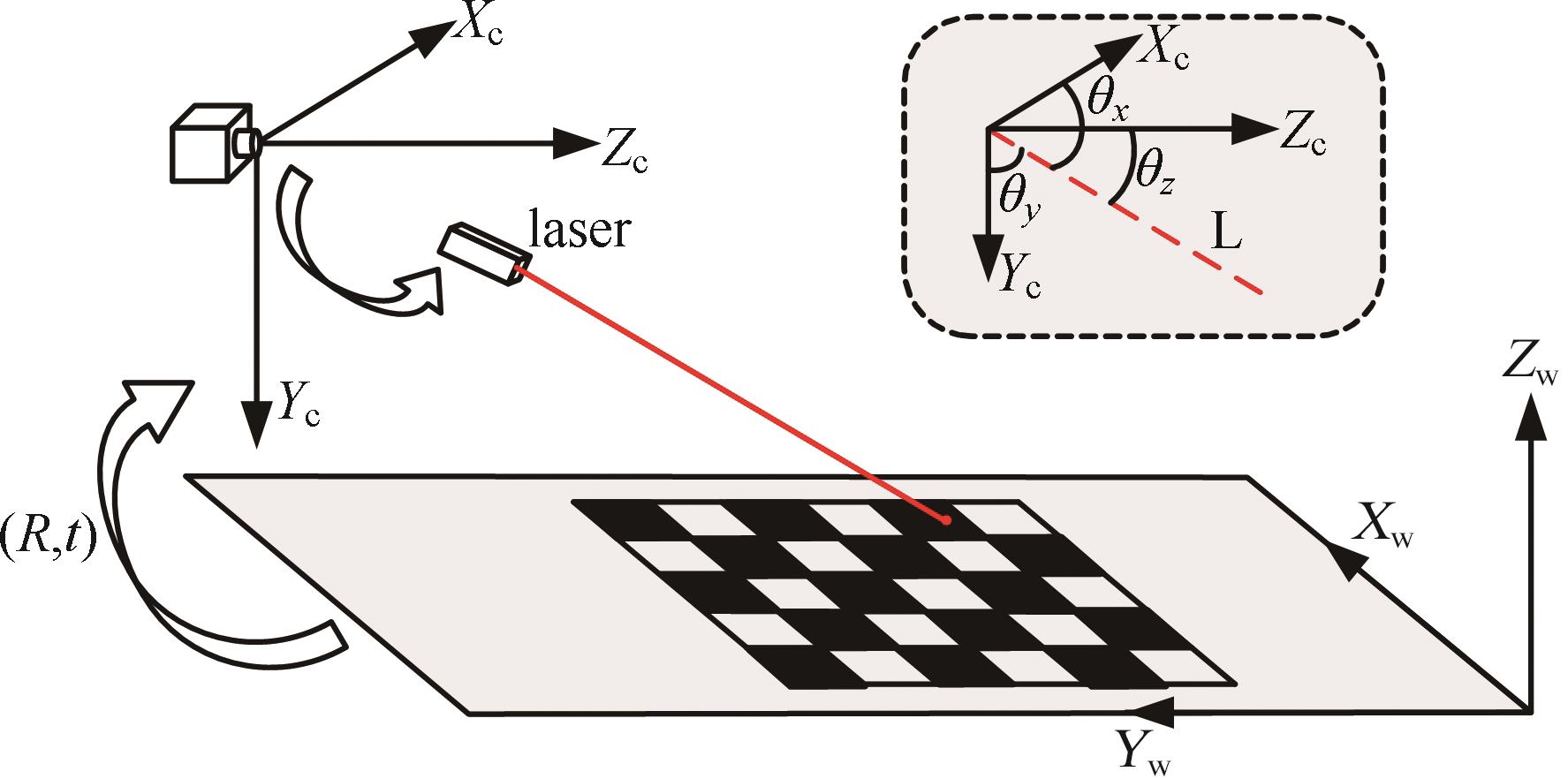
图2 激光测距模块和相机的标定示意图
Fig.2 Calibration diagram of laser ranging module and camera
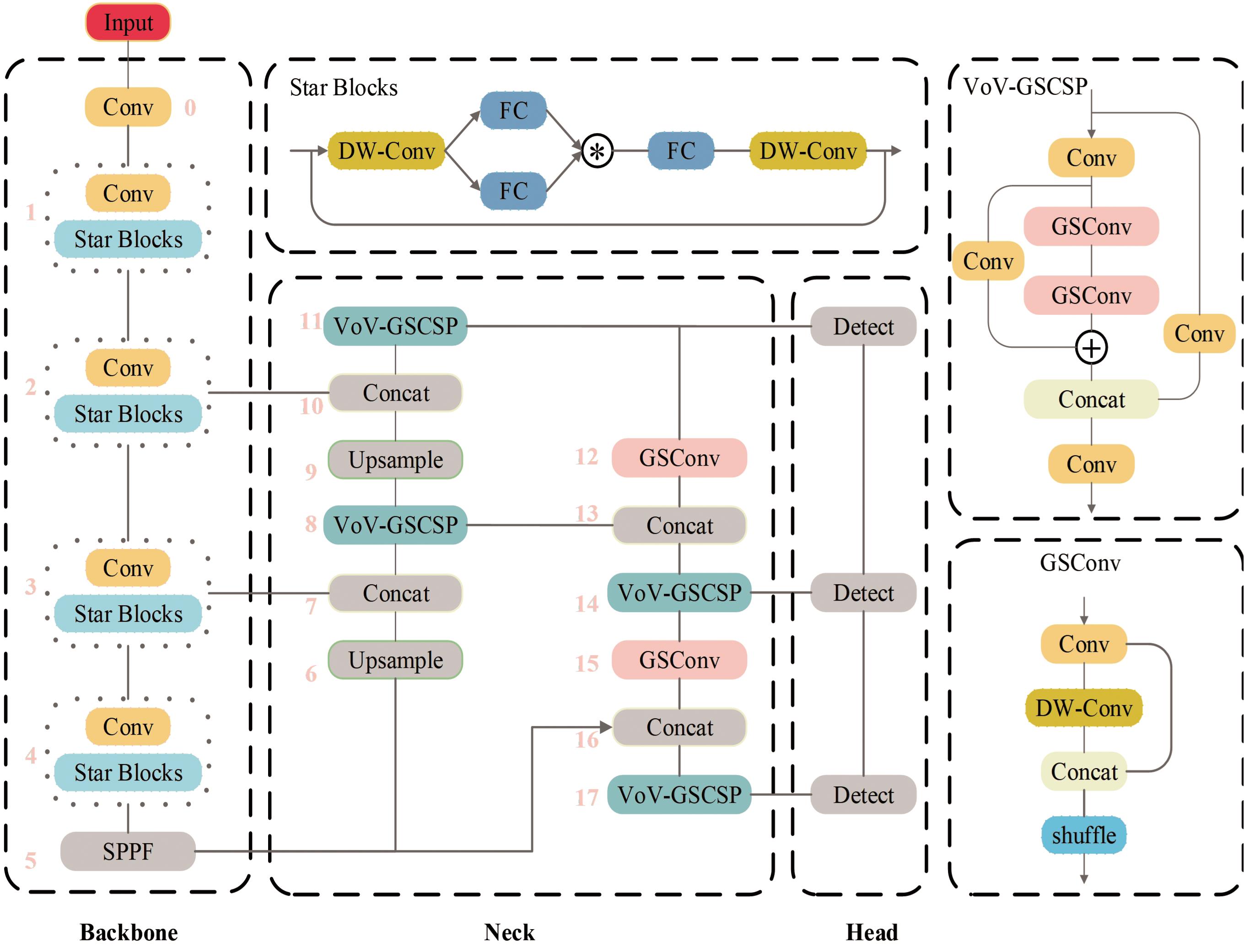
图3 SGV-YOLOv8网络结构
Fig.3 SGV-YOLOv8 network architecture
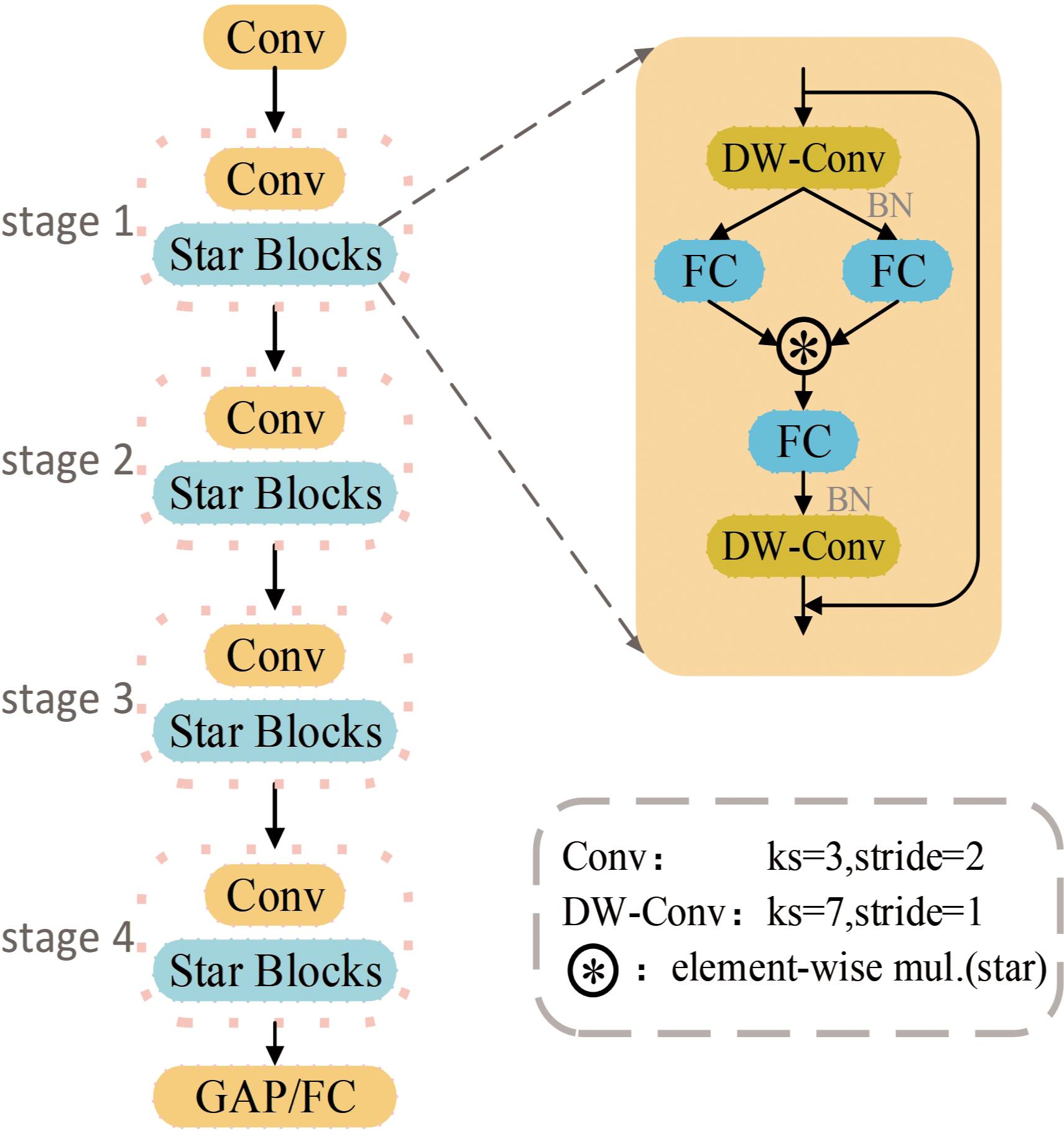
图4 StarNet网络结构
Fig.4 StarNet network architecture
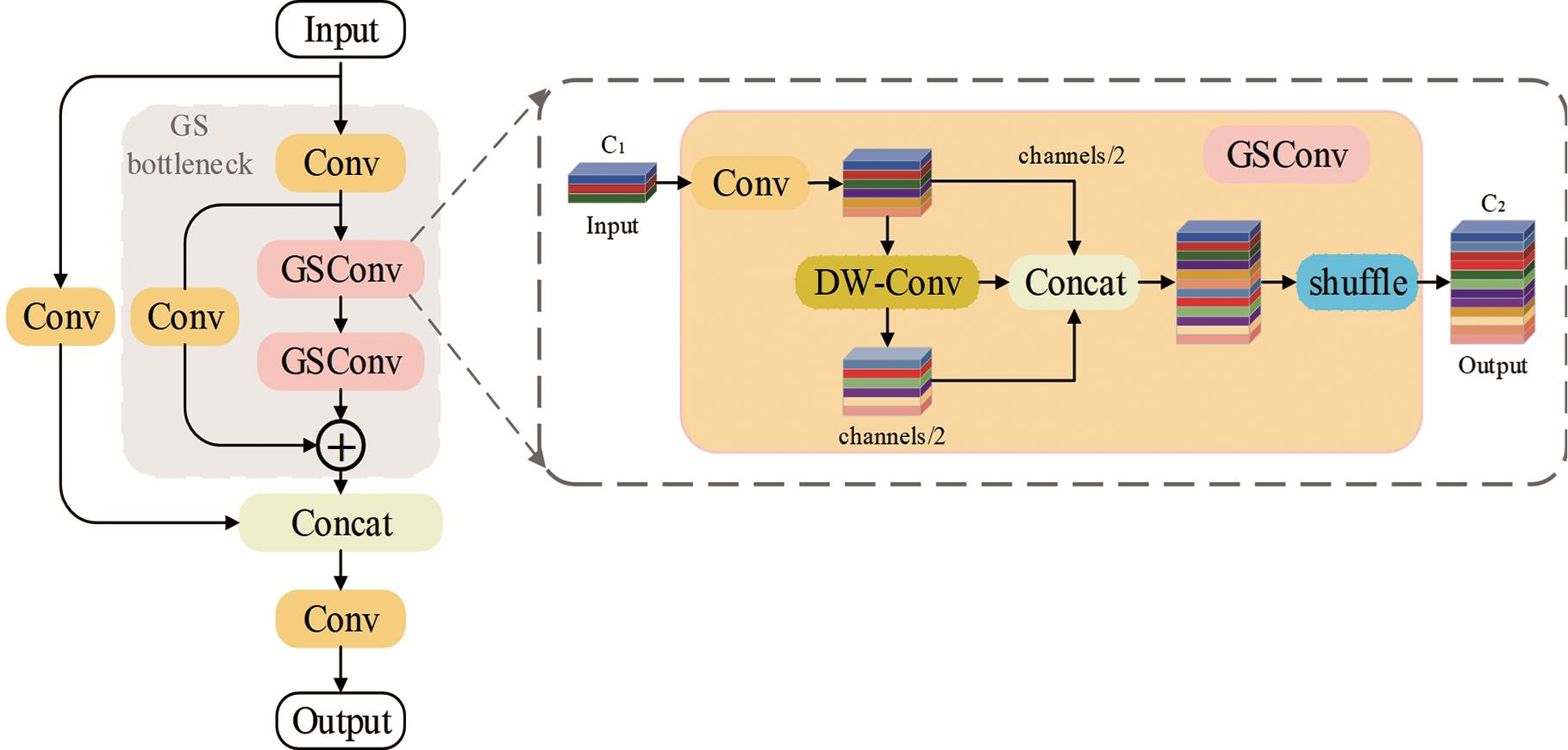
图5 VoV-GSCSP模块及GSConv模块结构
Fig.5 Architecture of VoV-GSCSP module and GSConv module
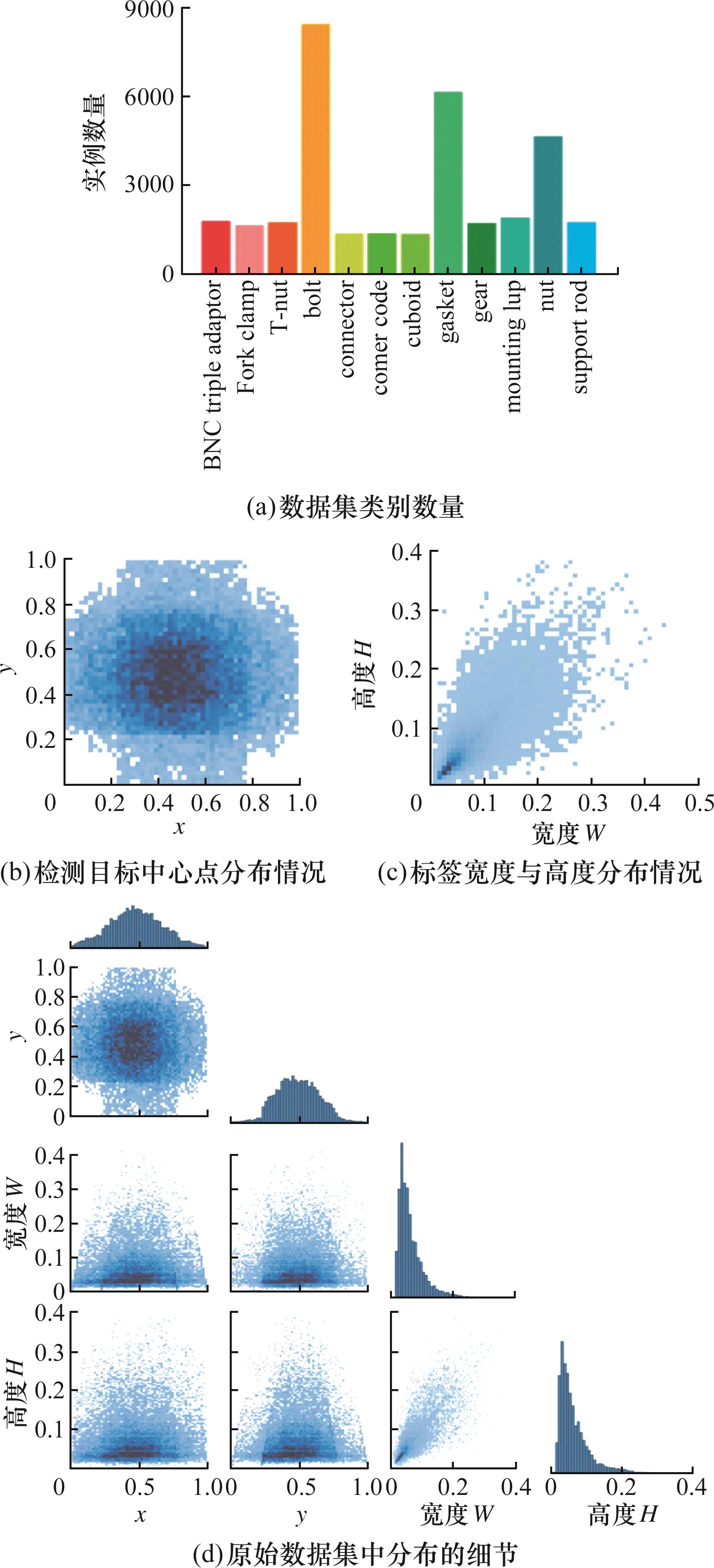
图6 数据集的可视化
Fig.6 Visualization of data sets
| 网络配置项 | 结构参数 |
|---|---|
| Epochs | 150 |
| Ir0 | 0.01 |
| Optimizer | SGD |
| Momentum | 0.937 |
| Weight decay | 0.0005 |
| Batch size | 64 |
表 1 模型超参数设置
Tab.1 Model super parameter setting
| 网络配置项 | 结构参数 |
|---|---|
| Epochs | 150 |
| Ir0 | 0.01 |
| Optimizer | SGD |
| Momentum | 0.937 |
| Weight decay | 0.0005 |
| Batch size | 64 |
| 模型 | 参数规模/MB | GFLOPs/G | 推理速度/ (帧·s | mAP@0.5/% |
|---|---|---|---|---|
| Faster R-CNN | 140.8 | 406.6 | 10 | 83.1 |
| SSD | 50.2 | 360.9 | 107 | 75.7 |
| YOLOv5 | 13.8 | 15.9 | 11 | 98.8 |
| YOLOv6s | 8.3 | 11.8 | 263 | 98.0 |
| YOLOv8m | 49.6 | 79.1 | 208 | 99.2 |
| YOLOv8n | 6.0 | 8.9 | 164 | 99.0 |
| YOLOv8s | 21.4 | 28.8 | 303 | 98.9 |
表2 Self Parts零件数据集在不同算法上的性能比较
Tab.2 Performance comparison of part datasets on different algorithms
| 模型 | 参数规模/MB | GFLOPs/G | 推理速度/ (帧·s | mAP@0.5/% |
|---|---|---|---|---|
| Faster R-CNN | 140.8 | 406.6 | 10 | 83.1 |
| SSD | 50.2 | 360.9 | 107 | 75.7 |
| YOLOv5 | 13.8 | 15.9 | 11 | 98.8 |
| YOLOv6s | 8.3 | 11.8 | 263 | 98.0 |
| YOLOv8m | 49.6 | 79.1 | 208 | 99.2 |
| YOLOv8n | 6.0 | 8.9 | 164 | 99.0 |
| YOLOv8s | 21.4 | 28.8 | 303 | 98.9 |
| 模型 | 参数规模/MB | GFLOPs/G | mAP@0.5/% |
|---|---|---|---|
| MobileNet | 11.2 | 22.6 | 98.5 |
| ShuffleNet | 12.4 | 17.4 | 98.7 |
| GhostNet | 12.4 | 17.3 | 98.6 |
| FasterNet | 16.7 | 21.7 | 99.0 |
| StarNet | 11.1 | 17.3 | 98.7 |
表3 不同骨干网络的比较
Tab.3 Comparison of different backbone networks
| 模型 | 参数规模/MB | GFLOPs/G | mAP@0.5/% |
|---|---|---|---|
| MobileNet | 11.2 | 22.6 | 98.5 |
| ShuffleNet | 12.4 | 17.4 | 98.7 |
| GhostNet | 12.4 | 17.3 | 98.6 |
| FasterNet | 16.7 | 21.7 | 99.0 |
| StarNet | 11.1 | 17.3 | 98.7 |
原始 YOLOv8 网络 | YOLOv8 网络+ StarNet | YOLOv8 网络+ GSConv | YOLOv8 网络+ VoV-GSCSP | YOLOv8 网络+ StarNet+ GSConv | YOLOv8 网络+ StarNet+ VoV-GSCSP | YOLOv8 网络+ GSConv+ VoV-GSCSP | 原始YOLOv8 网络+ StarNet+ GSConv+ VoV-GSCSP | |
|---|---|---|---|---|---|---|---|---|
| YOLOv8 | √ | √ | √ | √ | √ | √ | √ | √ |
| StarNet | √ | √ | √ | √ | ||||
| GSConv | √ | √ | √ | √ | ||||
| VoV-GSCSP | √ | √ | √ | √ | ||||
| 参数规模/MB | 21.4 | 11.1 | 5.81 | 19.3 | 12.0 | 12.7 | 19.9 | 11.1 |
| GFLOPs/G | 28.8 | 17.3 | 26.2 | 21.3 | 16.9 | 17.3 | 25.1 | 14.1 |
推理速度/ (帧·s | 303.4 | 384.6 | 277.5 | 286 | 323.3 | 344.9 | 293.7 | 417.2 |
| mAP@0.5/% | 98.9 | 98.7 | 99.0 | 98.9 | 98.5 | 98.7 | 99.2 | 98.9 |
表4 YOLOv8的消融实验结果
Tab.4 Ablation test results of YOLOv8
原始 YOLOv8 网络 | YOLOv8 网络+ StarNet | YOLOv8 网络+ GSConv | YOLOv8 网络+ VoV-GSCSP | YOLOv8 网络+ StarNet+ GSConv | YOLOv8 网络+ StarNet+ VoV-GSCSP | YOLOv8 网络+ GSConv+ VoV-GSCSP | 原始YOLOv8 网络+ StarNet+ GSConv+ VoV-GSCSP | |
|---|---|---|---|---|---|---|---|---|
| YOLOv8 | √ | √ | √ | √ | √ | √ | √ | √ |
| StarNet | √ | √ | √ | √ | ||||
| GSConv | √ | √ | √ | √ | ||||
| VoV-GSCSP | √ | √ | √ | √ | ||||
| 参数规模/MB | 21.4 | 11.1 | 5.81 | 19.3 | 12.0 | 12.7 | 19.9 | 11.1 |
| GFLOPs/G | 28.8 | 17.3 | 26.2 | 21.3 | 16.9 | 17.3 | 25.1 | 14.1 |
推理速度/ (帧·s | 303.4 | 384.6 | 277.5 | 286 | 323.3 | 344.9 | 293.7 | 417.2 |
| mAP@0.5/% | 98.9 | 98.7 | 99.0 | 98.9 | 98.5 | 98.7 | 99.2 | 98.9 |
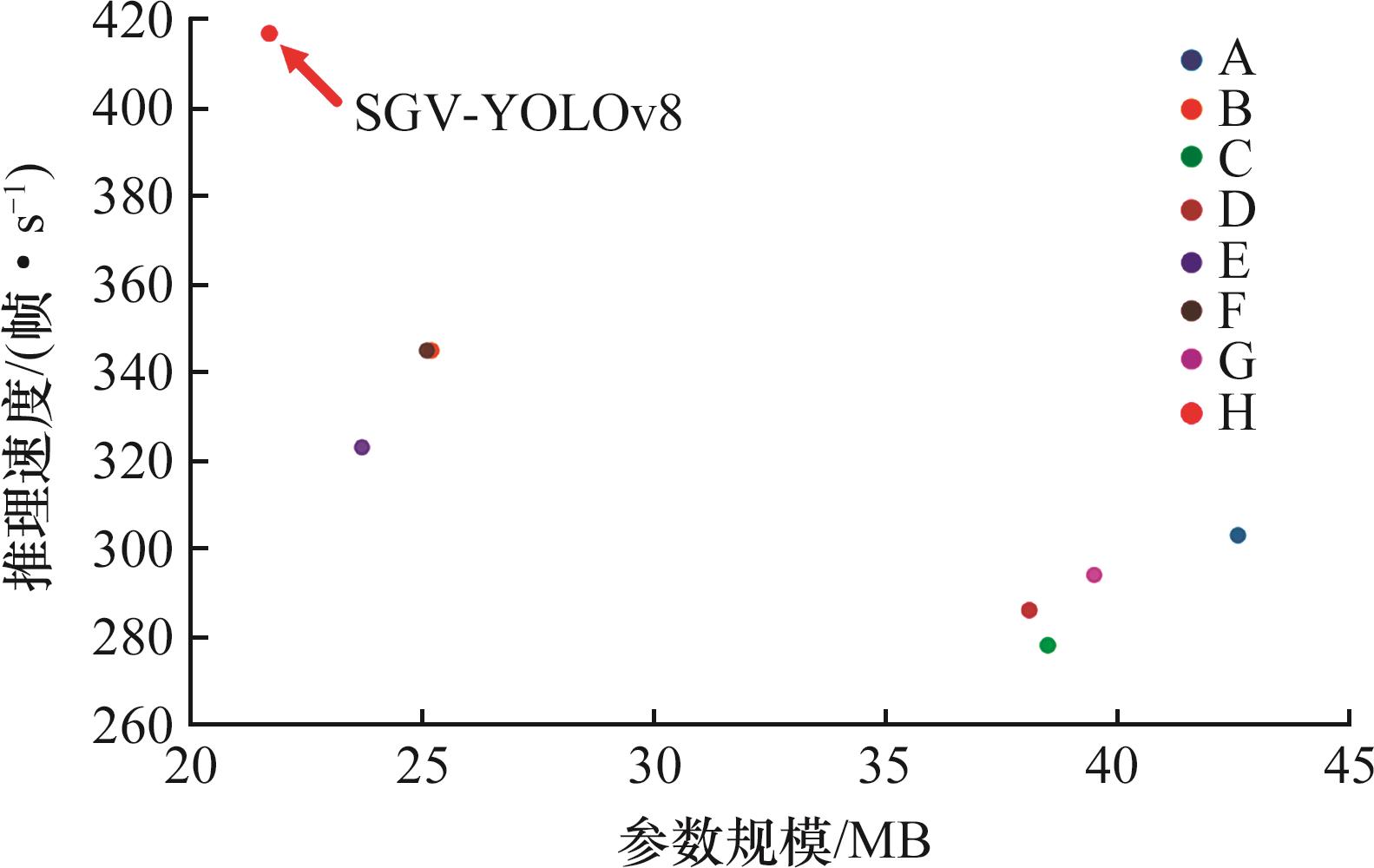
图7 消融实验结果散点图
Fig.7 Visualization of data sets
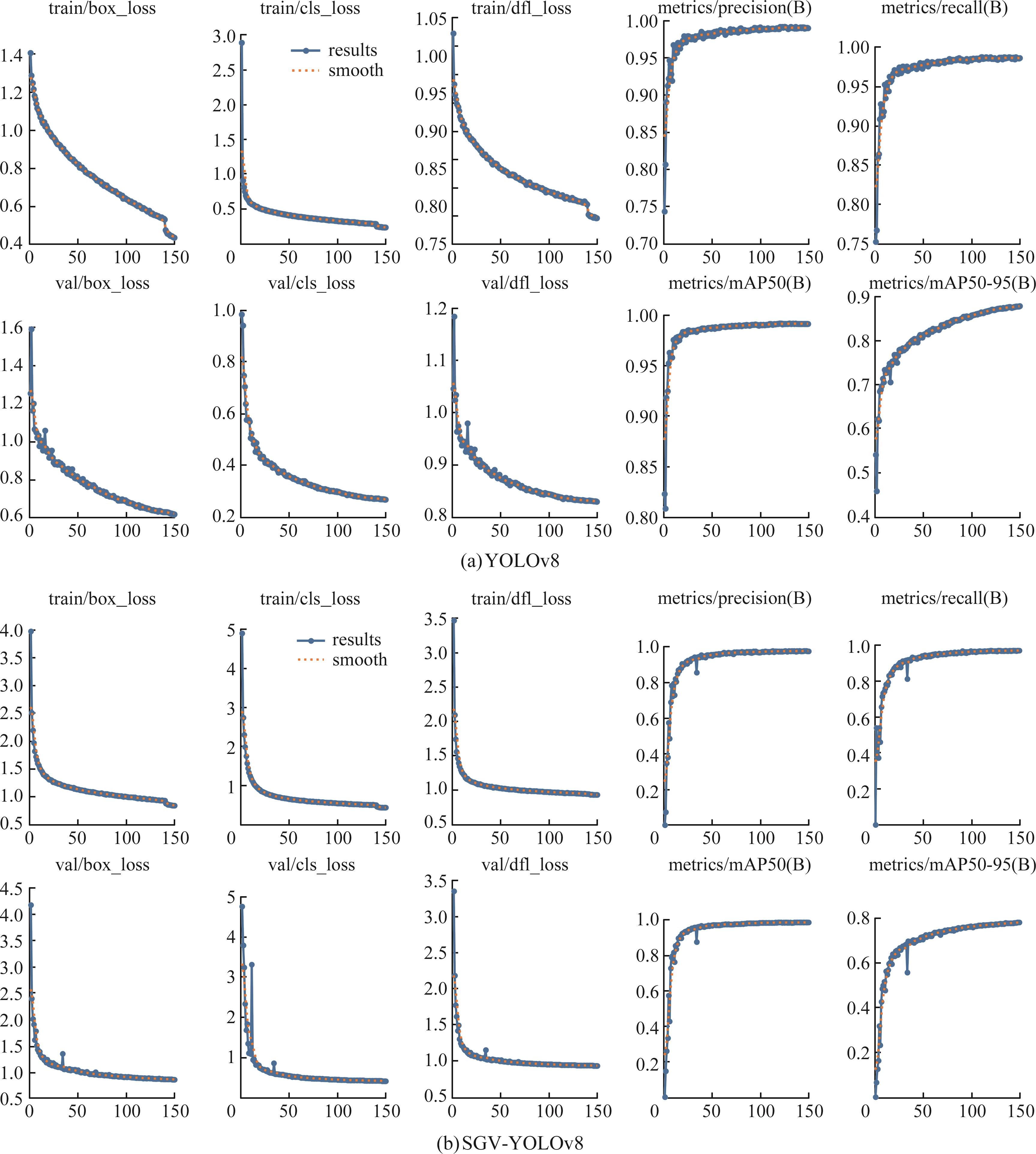
图8 YOLOv8和SGV-YOLOv8网络模型的结果对比
Fig.8 Comparison of results between YOLOv8 and SGV-YOLOv8 network
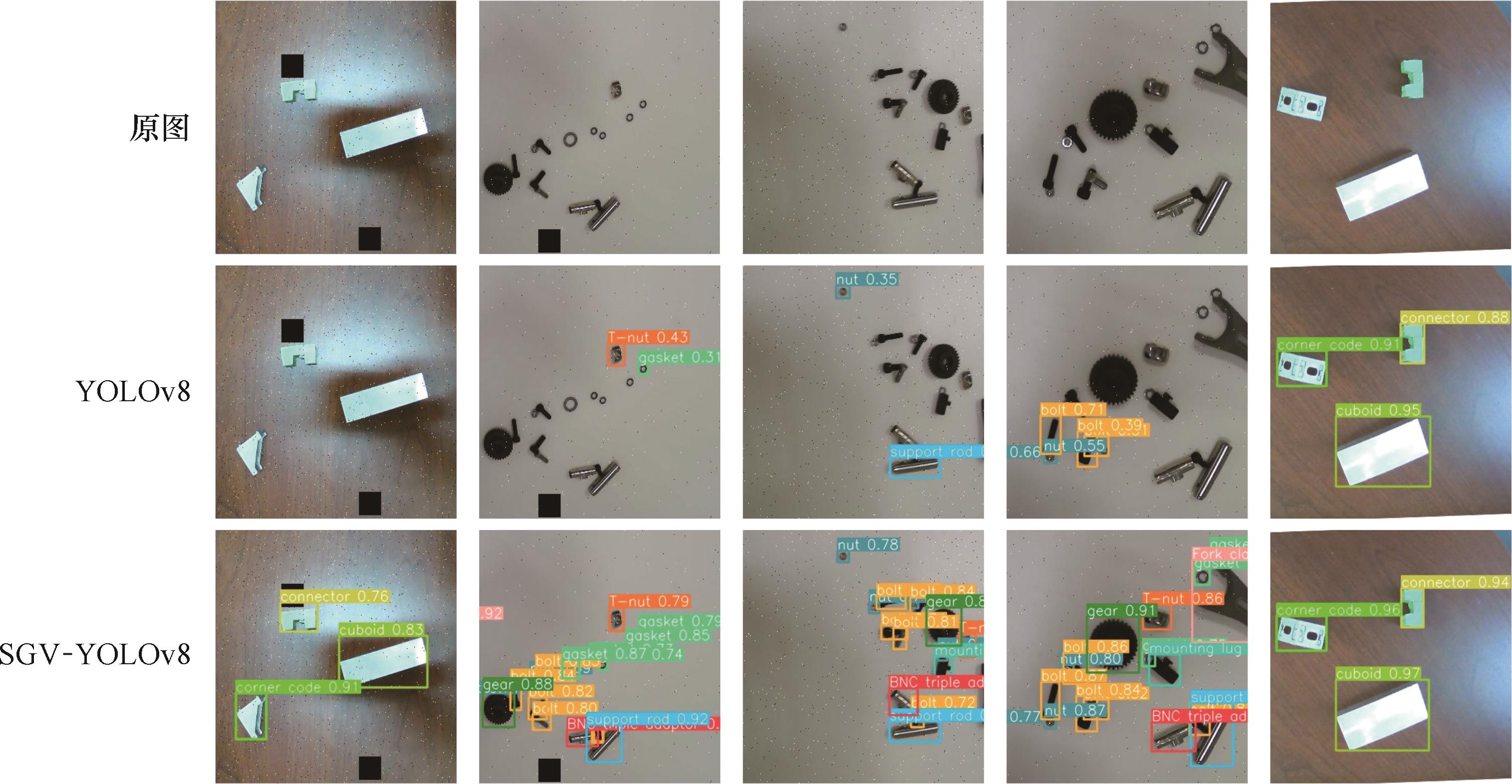
图9 不同模型对所选测试集检测对比
Fig.9 Comparison of different models for detection of selected test set
| 模型 | 参数 规模/MB | GFLOPs/ G | 推理速度 FPS/(帧·s | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|---|---|---|
| YOLOv5 | 13.8 | 15.9 | 21.2 | 99.2 | 76.9 |
| YOLOv6s | 8.3 | 11.8 | 266.0 | 98.7 | 74.4 |
| YOLOv8n | 6.0 | 8.9 | 128.2 | 99.0 | 77.9 |
| YOLOv8s | 21.4 | 28.8 | 312.5 | 98.9 | 76.8 |
| YOLOv8m | 49.6 | 79.1 | 288.9 | 99.1 | 77.4 |
| SGV-YOLOv8 | 11.1 | 14.1 | 344.8 | 99.2 | 78.6 |
表5 Industrial Tool数据集上的泛化实验
Tab.5 Generalization experiments on industrial tool datasets
| 模型 | 参数 规模/MB | GFLOPs/ G | 推理速度 FPS/(帧·s | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|---|---|---|
| YOLOv5 | 13.8 | 15.9 | 21.2 | 99.2 | 76.9 |
| YOLOv6s | 8.3 | 11.8 | 266.0 | 98.7 | 74.4 |
| YOLOv8n | 6.0 | 8.9 | 128.2 | 99.0 | 77.9 |
| YOLOv8s | 21.4 | 28.8 | 312.5 | 98.9 | 76.8 |
| YOLOv8m | 49.6 | 79.1 | 288.9 | 99.1 | 77.4 |
| SGV-YOLOv8 | 11.1 | 14.1 | 344.8 | 99.2 | 78.6 |
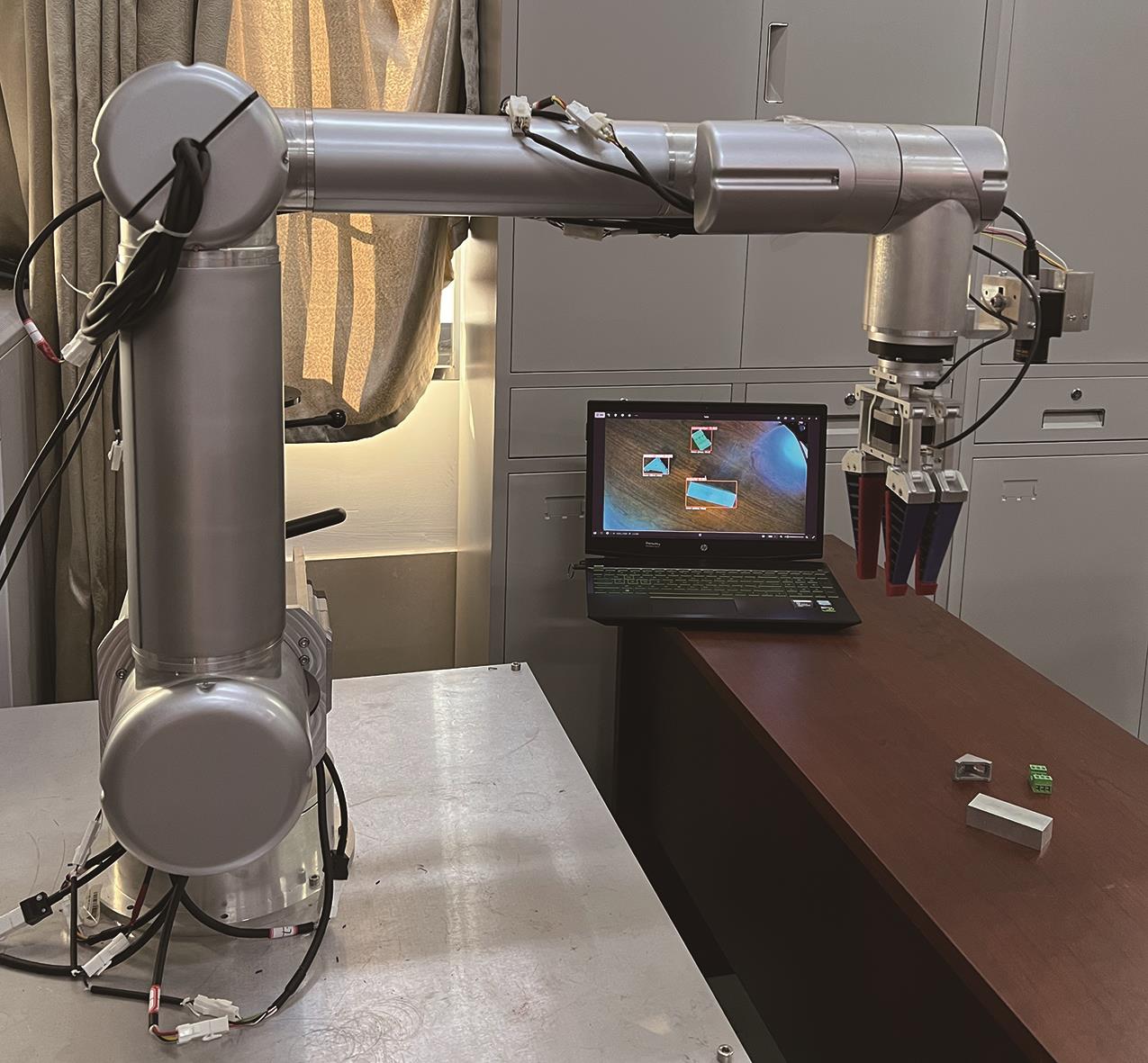
图10 机械臂实物图
Fig.10 Physical image of mechanical arm
| 模型 | 试验次数 | 定位失败的零件数量 | 识别错误的零件数量 | 成功抓取次数 | 成功率/% |
|---|---|---|---|---|---|
| YOLOv8 | 30 | 7 | 2 | 21 | 70 |
| SGV-YOLOv8 | 30 | 6 | 0 | 24 | 80 |
表6 基于改进YOLOv8的机械臂零件抓取结果
Tab.6 Robot arm part grab results based on improved YOLO8
| 模型 | 试验次数 | 定位失败的零件数量 | 识别错误的零件数量 | 成功抓取次数 | 成功率/% |
|---|---|---|---|---|---|
| YOLOv8 | 30 | 7 | 2 | 21 | 70 |
| SGV-YOLOv8 | 30 | 6 | 0 | 24 | 80 |
| [1] | 谢丰隆, 韩建海, 李向攀. 一种快速的机器人固定视觉标定方法[J]. 机械设计与制造,2018(11): 237-240. |
| XIE Fenglong, HAN Jianhai, LI Xiangpan. A Fast Way of Stable Camera Calibration with Robot[J]. Machinery Design & Manufacture, 2018(11):237-240. | |
| [2] | 那一鸣, 胡超, 邱业余, 等. 基于机器视觉的汽车车门三维定位引导[J]. 中国机械工程, 2024, 35(9): 1677-1687. |
| NA Yiming, HU Chao, QIU Yeyu, et al. Three-dimensional Positioning Guidance of Automobile Doors Based on Machine Vision [J]. China Mechanical Engineering, 2024, 35(9): 1677-1687. | |
| [3] | NAKAGUCHI V M, LIU Zifu, et al. 3D Camera and Single-point Laser Sensor Integration for Apple Localization in Spindle-type Orchard Systems[J]. Sensors, 2024, 24(12): 3753. |
| [4] | LUHMANN T, FRASER C, MAAS H G. Sensor Modelling and Camera Calibration for Close-range Photogrammetry[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 115: 37-46. |
| [5] | LIU Zewei, LU Dongming, QIAN Weixian, et al. Calibration of a Single-point Laser Range Finder and a Camera[J]. Optical and Quantum Electronics, 2018, 50(12): 447. |
| [6] | PATEL S N, REKIMOTO J, ABOWD G D. ICam: Precise At-a-distance Interaction in the Physical Environment[C]∥Pervasive Computing. Berlin, 2006: 272-287. |
| [7] | WITHER J, COFFIN C, VENTURA J, et al. Fast Annotation and Modeling with a Single-point Laser Range Finder[C]∥2008 7th IEEE/ACM International Symposium on Mixed and Augmented Reality. Cambridge, 2008: 65-68. |
| [8] | 吕张成, 张建业, 陈哲钥, 等. 基于深度学习的工业零件识别与抓取实时检测算法[J]. 机床与液压, 2023, 51(24): 33-38. |
| Zhangcheng LYU, ZHANG Jianye, CHEN Zheyao, et al. Real-time Detection Algorithm for Industrial Parts Recognition and Grabbing Based on Deep Learning [J]. Machine Tool & Hydraulics, 2023, 51(24): 33-38. | |
| [9] | HINTON G E, SALAKHUTDINOV R R. Reducing the Dimensionality of Data with Neural Networks[J]. Science, 2006, 313(5786): 504-507. |
| [10] | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation[C]∥2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, 2014: 580-587. |
| [11] | HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition[C]∥Computer Vision – ECCV 2014. Cham, 2014: 346-361. |
| [12] | GIRSHICK R. Fast R-CNN[C]∥2015 IEEE International Conference on Computer Vision (ICCV). Santiago, 2015: 1440-1448. |
| [13] | REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [14] | DAI J, LI Y, HE K, et al. R⁃FCN: Object Detection via Region⁃based Fully Convolutional Network[C]∥30th Conference on Neural Information Processing Systems. Barcelona, 2016:379-387. |
| [15] | 黎洲, 黄妙华. 基于YOLO_v2模型的车辆实时检测[J].中国机械工程, 2018, 29(15): 1869-1874. |
| LI Zhou, HUANG Miaohua. Vehicle Detections Based on YOLO_v2 in Real-time [J]. China Mechanical Engineering, 2018, 29(15): 1869-1874. | |
| [16] | REDMON J, DIVVALA S, GIRSHICK R, et al. You Only Look Once: Unified, Real-time Object Detection[C]∥2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, 2016: 779-788. |
| [17] | LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: Single Shot MultiBox Detector[C]∥Computer Vision–ECCV 2016. Cham, 2016: 21-37. |
| [18] | MA Xu, DAI Xiyang, BAI Yue, et al. Rewrite the Stars[C]∥2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, 2024: 5694-5703. |
| [19] | LI H, LI J, WEI H, et al. Slim-neck by GSConv: a Better Design Paradigm of Detector Architectures for Autonomous Vehicles[J]. arXiv Preprint arXiv:, 2022. |
| [1] | 张松, 张超勇, 朱传军, 赛希亚拉图. 基于空间注意力机制U-Net的铣刀磨损在位监测方法[J]. 中国机械工程, 2025, 36(11): 2720-2727. |
| [2] | 那一鸣1, 胡超1, 邱业余2, 卢礼兵2, 宋凯1. 基于机器视觉的汽车车门三维定位引导[J]. 中国机械工程, 2024, 35(09): 1677-1687. |
| [3] | 房运涛, 王晓东, 徐松, 王会彬, 罗怡, . 万向支架微小螺纹副自动装配系统[J]. 中国机械工程, 2022, 33(06): 698-706. |
| [4] | 易怀安, 赵欣佳, 唐乐, 陈永伦. 基于彩色图像奇异值熵指标的磨削表面粗糙度视觉测量方法[J]. 中国机械工程, 2021, 32(13): 1577-1583. |
| [5] | 李茂月;吕虹毓;王飞;贾冬开. 基于机器视觉的智能车辆鲁棒车道线识别方法[J]. 中国机械工程, 2021, 32(02): 242-251. |
| [6] | 陈天凡, 高诚辉, 何炳蔚. 自遮挡物体线激光测量视点规划[J]. 中国机械工程, 2016, 27(10): 1370-1376. |
| [7] | 田明锐, 胡永彪, 金守峰. 结合SVM后验概率的散料料位识别试验研究[J]. 中国机械工程, 2016, 27(05): 646-651. |
| [8] | 郑金驹, 李文龙, 王瑜辉, 罗明成. QFP芯片外观视觉检测系统及检测方法[J]. 中国机械工程, 2013, 24(3): 290-294,301. |
| [9] | 田明锐1, 胡永彪1, 金守峰2. 基于图像纹理的散料装车料位识别试验研究[J]. 中国机械工程, 2013, 24(07): 910-914. |
| [10] | 杨庆华1, 陈亮1, 荀一1, 陈文彪2. 基于机器视觉的PCB裸板缺陷自动检测方法[J]. 中国机械工程, 2012, 23(22): 2661-2666. |
| [11] | 陈天凡1, 2, 高诚辉1, 何炳蔚1. 物体三维数字化中消除遮挡孔洞的视点规划方法研究[J]. 中国机械工程, 2012, 23(21): 2585-2590. |
| [12] | 周博文, 王耀南, 张辉, 葛继. 基于机器视觉的酒液智能检测系统研究与开发 [J]. 中国机械工程, 2010, 21(7): 766-772,821. |
| [13] | 张辉;王耀南;葛继;周博文;. 液体药品异物检测智能机器人系统的设计[J]. 中国机械工程, 2009, 20(20): 0-2519. |
| [14] | 伍济钢;宾鸿赞;. 薄片零件机器视觉图像亚像素边缘检测[J]. J4, 2009, 20(03): 0-266. |
| [15] | 何博侠;张志胜;徐孙浩;史金飞;. 大尺寸机械零件的机器视觉高精度测量方法[J]. J4, 2009, 20(01): 0-14,1. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||